2.1. Model Overview
The models developed include FDS [
11], and evacuation route Search Algorithm, in which the FDS fire simulation system is a simulator developed by the American Academy of Sciences for simulating fire scenarios, which has tried its best to develop and combine with the actual fire parameters correction for many years, and now it has become the most dominant tool for simulating fire.
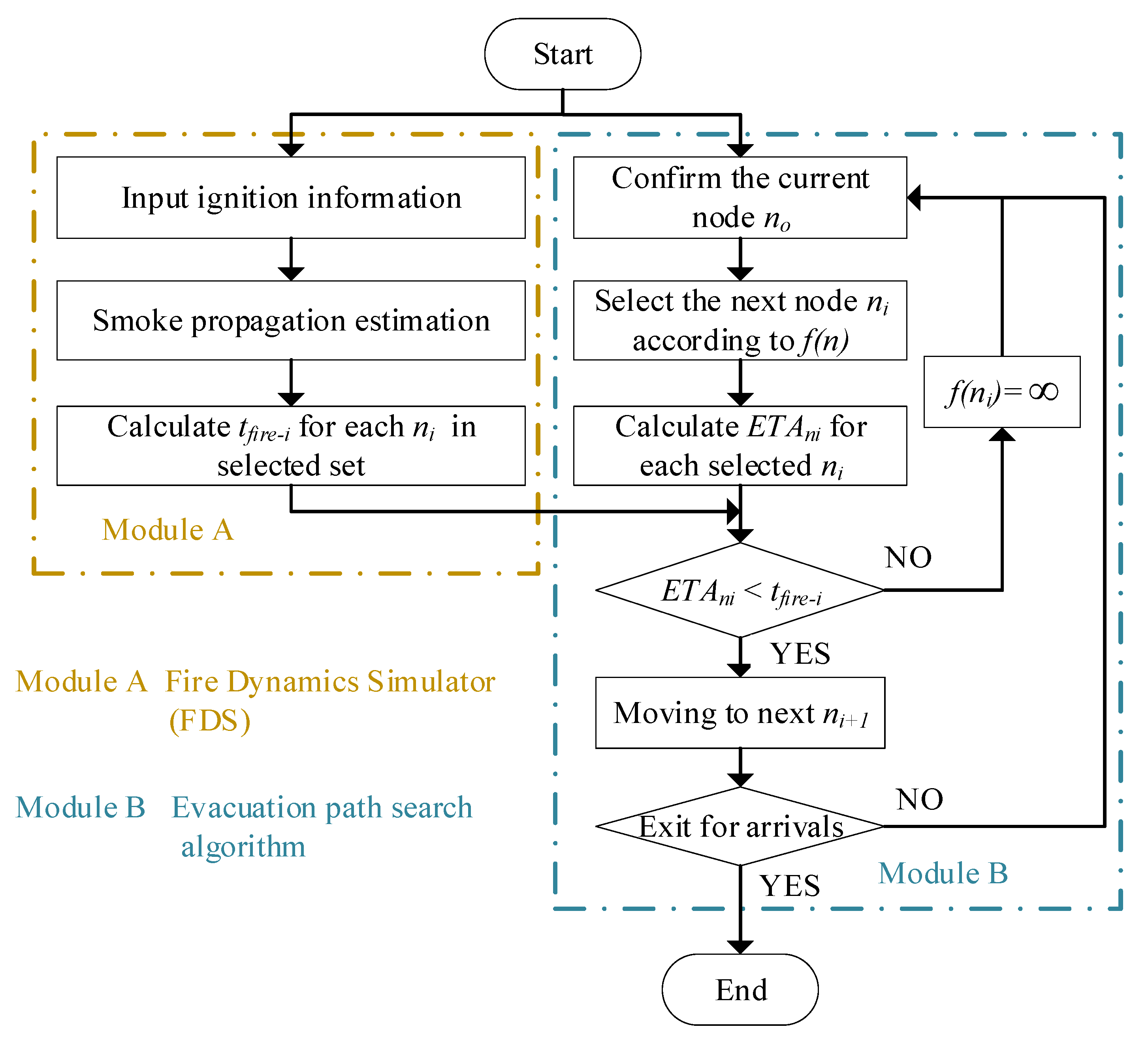
This section proposes an automatic evasion route planning method in fire areas that combines both offline search and online search, which includes two parts: offline calculation and online search. A static algorithm is applied to search for the optimal route containing the evacuation route from each node to the exit node, so that the optimal route can be dynamically searched by comparing the online optimized real-time node information with the previous node information. The online optimization searches the local area and converges quickly, so as to obtain a new optimal route that meets the real-time requirements in a short time.
The overall model framework of optimal route planning based on fire prediction data are shown in
Figure 1.
In this model, the route search
algorithm is used. Thus, the efficiency of the subsequent nodes can be used as the evaluation metric [
28,
29], including (1) the route distance between the current node and the subsequent nodes, and (2) the sum of the straight-line distances from the next node to each exit; the basic equations of the algorithm are as follows:
In Equation (
1),
is the evaluation cost of the node
n,
is the route distance from the node
to the next node
, and
is the estimated cost of the shortest distance from
to the target node. The value is usually calculated using the Manhattan distance or Euclidean distance, and the calculation formula is as follows:
In the formula, and are the coordinates of neighboring nodes ; and are the coordinates of the current node ; and are the coordinates of the target node i denoted as the target exit. This method evaluates the cost of multiple routes to the next node and selects the next node with the least cost to reach the exit node .
The improved
algorithm requires the time that a person moves on a network edge as the weight of that evacuation network edge. The relationship between Chinese gender, age, height, weight, and speed of the person is shown after literature research [
30,
31].
In order to ensure that all people can avoid the fire and escape safely, this paper takes the example of a female with a height of 1.58 m and a weight of 53 kg in
Table 1 as a reference, and selects a movement speed of 1 m/s. The cost replacement formula for the edges in the evacuation network is shown in Equation (
4).
In Equation (
4),
represents the length of the edge
, while
represents the movement speed of the person: 1 m/s. By using Equation (
4), the time moving from each node to the adjacent nodes can be calculated. By comparing the time to exceed the fire product at each node with the time required to evacuate personnel to that node, the danger area can be avoided, and the best node can be selected for people to evacuate to the safe area gradually.
2.2. Dynamic Optimization for Rapid Evasion of Fire Areas
This section uses the algorithm to solve the shortest path in the static road network. The algorithm is usually judged by the sum of the cost already paid and the cost to be paid, which can not only shorten the search time but also speed up the search efficiency.
When fire or other unexpected accidents do not occur, the nodes and edges in the cruise ship network topology diagram can all pass normally. In the actual evacuation process, passengers can choose to evacuate to the gathering station and then take the lifeboat to the safe sea. In this situation, the a priori evacuation network constructed offline by the algorithm can be used, which contains the shortest evacuation route and evacuation route length that is between each node in the network topology graph and the evacuation endpoint.
In the case of cruise ship fire evacuation, the shortest route solved by the conventional algorithm only considers the shortest evacuation route and does not consider the impact of fire products on people’s safety and their movement speed. The a priori evacuation network constructed offline does not take the fire location and the development of the fire situation into account. When the fire incident threatened the evacuation route planned offline, the life safety of the cruise ship passengers would be threatened if they continued to escape according to that evacuation route.
In this paper, in response to the ineffectiveness of the traditional
algorithm in path planning emergency evacuation in the face of large scenarios, the cost calculation in Equation (
1) is optimized. On the basis of the known path information of the network node graph, the calculation of
is based on the path length, adding the influence of the path travel rate. The improved
is calculated as follows:
in the calculation,
l denotes the path length,
denotes the flat path travel rate,
and
denote, respectively, the length weighting factor and speed weighting factor, taking
= 0.15 and
= 0.85.
as the heuristic term in the
algorithm determines the degree of intelligence of the algorithm. If
is too small, it will make the
algorithm gradually degenerate into the Dijkstra algorithm, forming a blind search and becoming inefficient. If
is too large, then it would fail to ensure that the path found is the optimal path. In the three-dimensional network diagram of this paper, the Euclidean distance cannot be used to measure the size of
value because the neighboring nodes of each node are different. If we want to reach the target node, we can only gradually advance through neighboring nodes. Thus, for the node with a small Euclidean distance from the target node, it may take a longer time to reach the target node. Based on this, a priori model based on Dijkstra is used to calculate all the path lengths of each node to the target node in advance, which is used as the calculation criterion for
, as shown in Equation (
6). The cost calculation formula of the improved
algorithm can be obtained by combining Equation (
5) as shown in Equation (
7):
in Equation (
7),
denotes the set of shortest distances from all nodes to the target node using the Dijkstra algorithm.
denotes the scaling factor. We take
=
= 0.1 for the uniform weight.
is the final cost calculation formula.
The improved algorithm can finally obtain a path that can bypass the fire product exceedance area and ensure the relatively shortest evacuation time.
In addition, the improvement of the automatic avoidance path planning algorithm consists of three parts: Firstly, the dynamic diffusion process of fire is simulated by FDS to obtain the time data of the nodes in the evacuation network affected by fire; secondly, by calculating the evacuation speed of people, the weight of each edge of the evacuation network is modified by replacing the path length with the evacuation time, and then determining whether the time of personnel arriving at each node in the evacuation network and the time of the node going to the neighboring nodes. Thirdly, the dynamic optimization of the automatic path avoidance in the fire area solves the local path planning problem, which reduces the number of nodes and paths that need to be recalculated and avoids a large number of repeated calculations.
The offline computation is based on the optimized
algorithm to calculate the a priori shortest paths of all nodes. The online search is used to dynamically update and optimize the a priori evacuation paths containing the nodes in the fire region, using a breadth-first search strategy [
12]. When the network topology of a cruise ship changes, the automatic fire area avoidance path planning method can find the new shortest evacuation path in a short time.
The a priori evacuation route network calculated offline by the
algorithm denotes
and the set of impassable nodes denotes set
S. The set of neighboring nodes
of the nodes in set
S denotes
and the number of elements in
denotes
. The set of starting nodes containing the a priori route through the fire region denotes
and the optimized evacuation network denotes
. When a fire accident occurs in the part of the route of the cruise ship which contains the nodes in the set, then the fire region automatic avoidance dynamic planning algorithm is used to optimize the a priori route through the fire area. The principle of this is shown in Algorithm 1.
| Algorithm 1: Evacuation route dynamic optimization algorithm pseudo code. |
 |
In this algorithm, denotes the impassable nodes in the fire domain; denotes the adjacent node of a node in the fire domain; denotes the starting node of an a priori route through the fire region; denotes an a priori evacuation route; denotes the number of adjacent nodes of the number of node r in the fire domain.
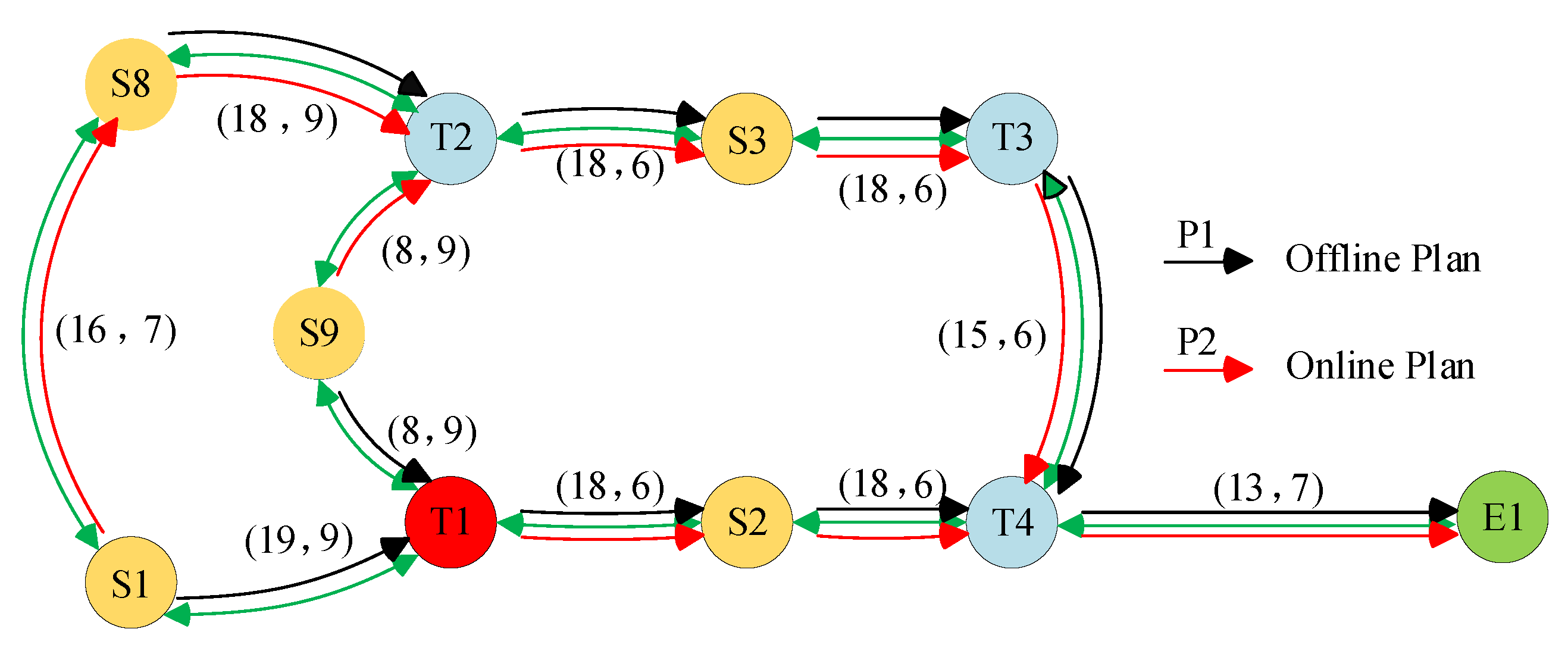
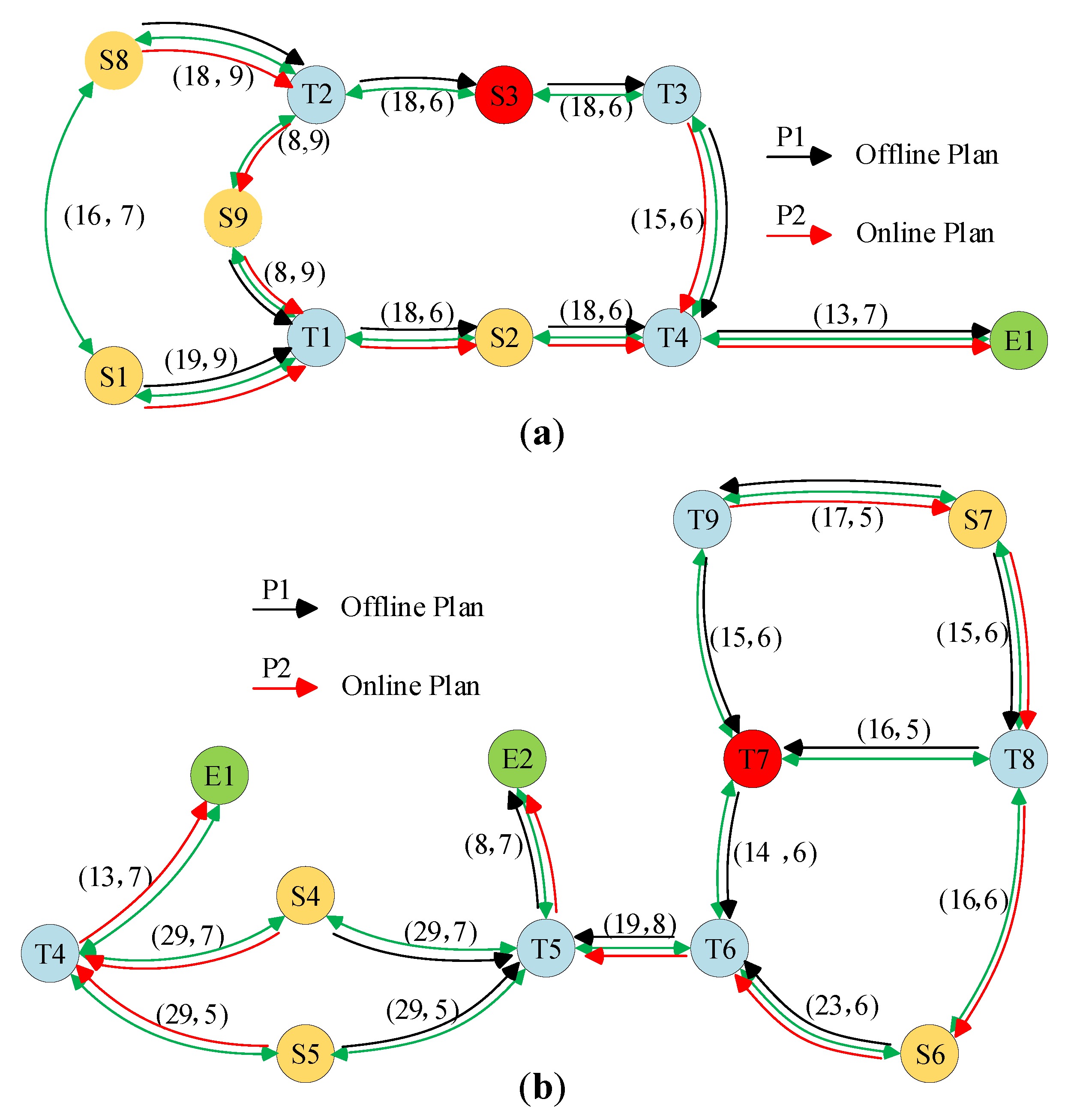
In the network topology diagram, the evacuation route from the start node to the evacuation end node is as follows:
in Equation (
8),
are the node numbers and the cost
of the evacuation route
are as follows:
when a fire incident occurs in a cruise ship, the nodes at the location of the fire or the nodes severely affected by the fire will be impassable. Assuming that the set of real-time impassable nodes is S, then the dynamic optimization process of automatically avoiding the fire area can be described as Equation (
10), whose optimization objective is to find the shortest route between nodes to nodes, and the route must not contain nodes in the set S:
in Equation (
10), the weights
between the nodes are the actual costs of the evacuation routes.
Simultaneous calculation of evacuation routes of all nodes in causes redundancy in real-time computation. To save the online computation time for searching the shortest route, the dynamic optimization of the fire area auto-avoidance dynamic planning algorithm can be performed in two steps.
In the first step, Breadth-First Search is used to search for the shortest route from the nodes in to each evacuation endpoint. The principle of the Breadth-First Search algorithm is simple, and its core idea is as follows
- (1)
start from a vertex V0 in graph G and visit V0 first;
- (2)
visit all the vertices V1, V2, … that are adjacent to V0;
- (3)
visit all vertices adjacent to V1, V2, … that have not been visited before;
- (4)
follow that order, until all vertices have been visited.
Use the above breadth-first search method to visit the neighboring nodes
u of the node
i in
. If
u is in
, then visit the other neighboring nodes in turn until there exists a node
k not in
. When the route
does not contain a fire node, the a priori sparse route
of the node
k is used to update the sparse route from the node
i to the sparse endpoint
j as follows:
since the shortest route from each node to the exit in the network topology is already stored in an a priori evacuation network
, the BFS can quickly obtain the shortest route information from the specified node to the exit by accessing
. When the fire area auto-avoidance route planning method accesses the route information of a node, it takes a very short lookup time to obtain the relevant information from the a priori evacuation network.
In the second step, the evacuation routes of all the nodes n in are updated in a similar way, where all hazard routes containing fire nodes have been updated to . Unlike the nodes i in the network , is a feasible evacuation route that does not contain fire nodes, but it may not be the shortest one, so further optimization of the second shortest route is needed.
Assume that
is the set of updated feasible evacuation routes, and there exists a certain new route
that is
Visit the neighboring nodes of each node in
in turn and check whether there is a shorter route using Equation (
13). If the neighboring nodes
z of a node
s satisfy Equation (
13), it means that the route distance of the node
n through the node
z to the end of the evacuation
j is shorter than the current feasible evacuation route. According to Equation (
14), the route
is updated:
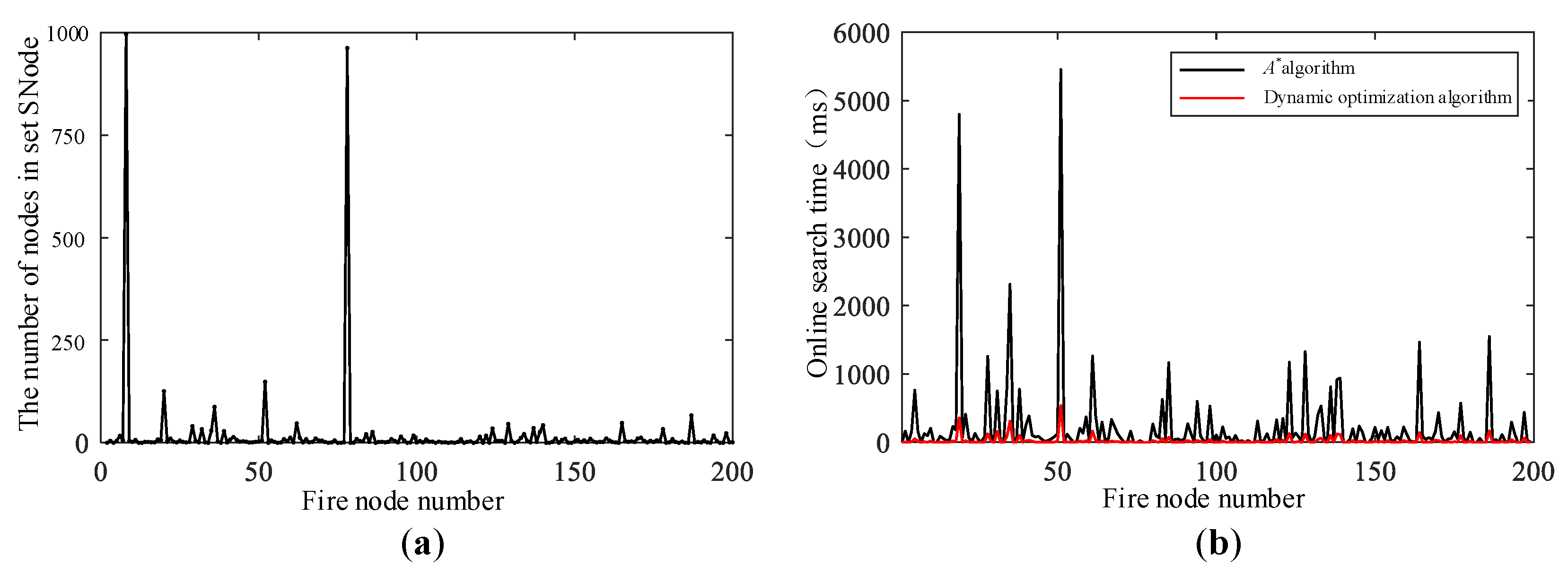
The dynamic optimization of the fire area automatic avoidance path planning method solves the problem of local path planning, which reduces the number of nodes and paths that need to be recalculated and avoids a lot of repeated calculation.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}