1. Introduction
Many physical phenomena in the real world, such as chemical reactions [
1], heat conduction [
2], fluid flow [
3], and other spatially distributed processes, have states that depend not only on time, but also on space. In general, such phenomena can be described by partial differential equations, called distribution parameter systems (DPS). Robotic arms and aerial refueling tubes with flexible structures, temperature distribution of catalytic reaction rods in chemical processes, large-scale population migration, information dissemination, and population consumption in social economy can all be modeled as distributed parameter systems [
4]. Since the 1960s, the development of modern partial differential equations and functional analysis has established a strict theoretical basis for distributed parameter systems. The well-posed issue as well as stability, controllability [
5], observability, and optimal control of distributed parameter systems have been intensively studied. On the other hand, the control issues of distributed parameter systems have been an active area of research [
6,
7].
The filtering or state estimation issues play a critical role to signal processing and control engineering areas [
8]. For distributed parameter systems, there are essentially two technical routes to address the challenge of filtering. One is to discretize the distributed parameter system into a finite dimensional system using a differential approach or finite element method. Then, finite dimensional filters are designed to achieve the state estimation of the system. A robust Kalman filter was given after discretizing the gas pipeline transient flow equation in [
9]. Moreover, a discrete-time Kalman filter [
10] was designed for linear infinite dimensional systems that are discretized in time rather than spatially approximated under the structure and energy preserving Crank-Nicolson framework. In [
11], robust filtering of discrete processes was studied by designing recursive filters in a finite horizon with the use of two-dimensional Riccati-like difference equations. The advantage of this technical route is that various filter design schemes in finite dimensional systems can be introduced to address the filtering issue of distributed parameter systems. However, the approximation from discretization may lead to bias in the filtering results. On the flip side, an advanced research topic is the design of filters directly for distributed parameter systems. The functional analysis LMI(LOI) approach [
12,
13] becomes an effective tool to directly solve the filtering issue of distributed parameter systems. An extended Kalman filter for semilinear infinite dimensional systems was proposed in [
14] by utilizing functional analysis. Robust
filtering is required when the system has uncertain and unknown perturbations [
15]. A network-based
filter [
16] was designed for a semilinear N-D diffusion equation under distributed in space measurements. A reliable
filtering issue [
17] was developed for switched parabolic systems. These issues regarding
filtering have been resolved simply and effectively by adopting the LMI approach. Most of the existing filtering strategies are based on a centralized way, where information can be collected from all sensor nodes. A natural choice to enhance effectiveness and save energy is to introduce a distributed way. Each sensing node communicates only with its neighboring nodes in sensor networks. Many existing results deal with the distributed filtering issue for networked control systems such as nonlinear systems [
18] and stochastic systems [
19]. However, less research has been conducted on distributed filtering of distributed parameter systems. Some studies have shown that distributed estimation is quite effective in reaching consensus. In recent years, special attention has been paid to the distributed
consensus filtering of various network systems, such as linear systems [
20], cyber-physical systems [
21], and delay systems [
22].
In the practical controller design, the system control should be finished in a given amount of time. Peter Dorato [
23] introduced the short-time stability concept for this reason in 1961. Due to its importance in the study of transient performance, the subject of finite time stability has received a lot of attention recently. Finite-time stability differs from the usual Lyapunov stability in that it is concerned with the evolution of the system state over a given finite time [0, T]. In [
24], the distributed
filtering in a finite-time horizon was studied for a class of Takagi–Sugeno fuzzy systems. For singular systems with Markovian jumping, finite-time
filtering was also investigated [
25]. Noticeably, distributed consensus
filtering of distributed parameter systems is still lacking today. Moreover, as mentioned before, most studies on filtering of distributed parameter systems have used fixed static sensor networks. Therefore, this paper aims to develop a mobile sensing approach to finite-time convergence analysis of distributed
consensus filters for a class of 3D parabolic systems.
It is well known that the nonlinearity caused by environmental circumstances is a widely occurring factor in engineering. As of now, the processing of nonlinear terms in the system has been concerned with allowing nonlinear functions to satisfy specific conditions, including the Lipschitz condition [
26], the Lipschitz-like condition based on one-norm [
27], and the sector bounded constraints [
28]. Moreover, it is also enabled to use the decomposition technique of nonlinearity, which divides the nonlinear function into a linear part and a high-order nonlinear part, as proposed in [
29]. In complex spatio-temporal distribution processes, the two parts of this nonlinearity may appear in a probabilistic way, namely, their type or intensity may have changed randomly. This model description has been little studied, and this paper will introduce this new view to discuss the nonlinearity.
For accurate estimation of the state of the actual network, measurement outputs need to be collected and processed to minimize the effects of possible noise and incomplete information. However, technical limitations restrict the sensor from outputting a signal with infinite amplitude, which makes the output subject to “sensor saturation”. Saturation occurs not only to degrade the estimated performance, but may also lead to undesired oscillations or even unstable behavior. In actual network environments, probabilistic sensor saturation is possible due to intermittent saturation brought on by intermittent sensor failures, changeable saturation level brought on by aging sensors, and abrupt changes in the network environment. This phenomenon is referred to as randomly occurring sensor saturation. Due to the nonlinear characteristics of saturation, the randomly occurring sensor saturation is actually a scenario where the linear and higher order nonlinear parts of the nonlinearity occur in a probabilistic way.
Guiding by the arguments above, we focus on building a novel distributed consensus filter for a class of 3D nonlinear distributed parameter systems such that the related filtering error system is finite-time stable while taking into account the noise attenuation level . The main contributions of this paper can be summarized as follows:
(1) A distinguishing feature of the research issue addressed is that the distributed filtering issue of 3D distributed parameter systems is studied by using an effective mobile sensing approach.
(2) The physical plant is under considered, nonlinear, bounded perturbation, randomly occurring sensor saturation, which makes more practical significance of our current study.
(3) The nonlinear function used to describe the uncertainty of a complex environment is decomposed into a part that satisfies the sector condition and a part that has the saturation property, and these two parts appear in a random way. To the authors’ knowledge, this nonlinear decomposition model is seldom seen in the processing of nonlinear terms in system filtering and control problems.
(4) The proposed finite-time distributed consensus filtering technique not only achieves state estimation in a short time, but also the estimation error satisfies the bounded consensus performance, which serves as a fast converging robust filtering technique suitable for complex spatially distributed processes.
(5) The system and filtering techniques are discussed in some special scenarios so that the associated filtering issues can be solved more easily.
The rest of the manuscript is structured as follows. In
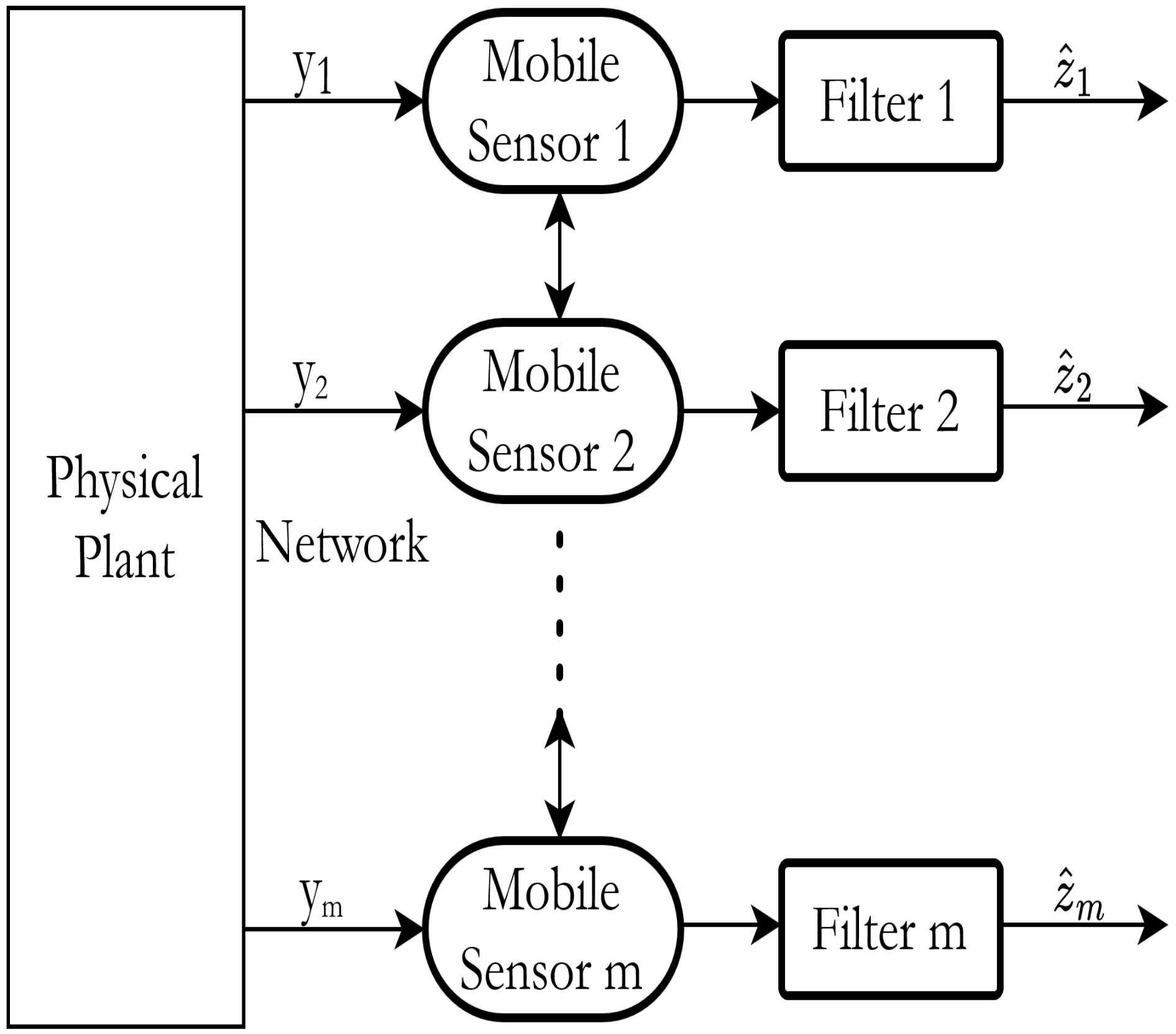
Section 2, the 3D nonlinear distributed parameter systems with a network of
m mobile sensors is presented; some preliminaries are given. In
Section 3, a mobile sensing approach is used to solve the distributed bounded
consensus filter design issue. The discussion of some scenarios related to the main results is available in
Section 4. A numerical example is provided in
Section 5 to show the effectiveness of the proposed approach. In
Section 6, conclusions are drawn.
Notation 1. The notation is standard, except as otherwise specified. means the derivative of the function with respect to time t. denotes the probability that event will occur. stands for the expectation of stochastic variable x. I denotes the identity matrix with appropriate dimension; stands for an m-dimensional diagonal matrix. If M is a matrix, denotes its transpose and means the largest eigenvalue of M. Moreover, matrices without explicit dimensions are assumed to be the appropriate dimension ones.
Let
be a Hilbert space with inner product
and corresponding induced norm
. Let
be a reflexive Banach space with norm denoted by
. It is assumed that
is embedded densely and continuously in
. Let
denotes the conjugate dual of
with induced norm
. It follows
with both embedding dense and continuously, the result of which is that we have
, for any constant
[
30].
2. Problem Formulation and Preliminaries
In this paper, a class of 3D nonlinear distributed parameter systems is studied. Let
denote the state of 3D distributed process at
and at spatial location
,
is a bounded region with smooth boundary
, and the measure of
is
. The adopted target object can be described by the following 3D nonlinear spatio-temporal distributed process.
subject to the initial condition
and having Dirichlet boundary conditions
The diffusion operators
denotes the spatial distribution of perturbation;
is external perturbation;
is the spatial distribution of the output;
H is a negative operator coefficient of nonlinear function
. It is assumed that
f can be decomposed into a part
that satisfies the sector condition and a part
that has the saturation property, and these two parts may occur in a probabilistic way.
where the stochastic variable
is a Bernoulli distributed white sequence taking values of 1 and 0 with
where
are known positive constant. It is assumed that the stochastic variable
is independent mutually. We have
Compared to the Lipschitz condition or sector condition, the decomposition method is another efficient method for dealing with nonlinearities. Also consider the occurrence of the decomposition term in a probabilistic way, the model is more suitable for the effect of environmental nonlinearity in practice.
The measurement output of
m mobile sensors in 3D space are presented as follows.
or
ith measurement output can be stated as
where
denotes the spatial distribution of
ith moving sensing device. The nonnegative function
is bounded. The spatial distribution function of each mobile sensor, in the general sense, is given by
where
,
,
.
It is worth noting that the spatial distribution here implies that each mobile sensing device can have a different spatial distribution function. denotes the location of the time-varying center of mass of the ith sensing device. Thus, it draws the moving trajectory of the ith sensing device.
The saturation function
is defined as
with
where
is the
ith element of the vector, and
is the saturation level.
For every
i, the stochastic variable
is a Bernoulli distributed white sequence taking values of 1 and 0 with
where
are known positive constants. It is assumed that the stochastic variables
are independent mutually in all
. Accordingly, we have
The measurement output after considering the randomly occurring sensor saturation can be described as
In order to rewrite the 3D nonlinear distributed parameter system (1) as an evolution equation, the following notations are given, and their meanings are explained.
Consider a linear operator satisfying the following assumptions:
Assumption 1. is bounded, that isfor and constant . Assumption 2. is coercive, that isfor and constant . The operator is referred to as state operator. Moreover, the perturbation operator is provided by , which satisfies . For a given time , , where are positive constants. In addition, is given by , which satisfies .
Then, it can be rewritten to obtain the corresponding compact form of the 3D nonlinear distributed parameter system (1).
where the state space is
, where
is the state of the system. The space
is identified by the Sobolev space
and its conjugate dual space
is
. Let infinitesimal operator
and its domain be given by
are absolutely continuous,
and
. The infinitesimal operator
generates a strongly continuous semigroup
, and the domain
of the operator
is dense in
, [
23].
The output can be expressed similarly as
where
,
and output operator
is given by
where
satisfying
.
To analyze finite-time filtering, we consider the following assumptions and definitions.
Assumption 3. There exists a constant such that Assumption 4. is bounded function satisfyingwhere is positive constant. Assumption 5. The saturation function is sector bounded, i.e.,where β is a positive constant. Definition 1 (Finite-time stability)
. For a given time constant , 3D filtering error systems with are said to be finite-time stable with respect to ifwhere , is a positive definite operator. Definition 2 (Finite-time boundedness). For a given time constant , 3D filtering error systems are said to be finite-time bounded with respect to if condition (18) holds, where , is a positive definite operator.
Definition 3 (Distributed bounded
consensus performance)
. The filters (20) are said to be distributed bounded consensus filters if there exist such that the filtering error satisfy the following inequalitieswhere are some given disturbance attenuation level, for any . If , then they are called distributed consensus filters. Lemma 1. Let be any m-dimensional real vectors, and let q be a positive scalar. Then the following inequality holds: 5. Simulation Example
In this section, simulations are given to illustrate how these results can be applied to achieve finite-time bounded in 3D filtering error system. With Dirichlet boundary conditions, we take into consideration a class of 3D nonlinear distributed parameter systems subject to the initial condition
, where
. The system parameters are proposed as follows:
and
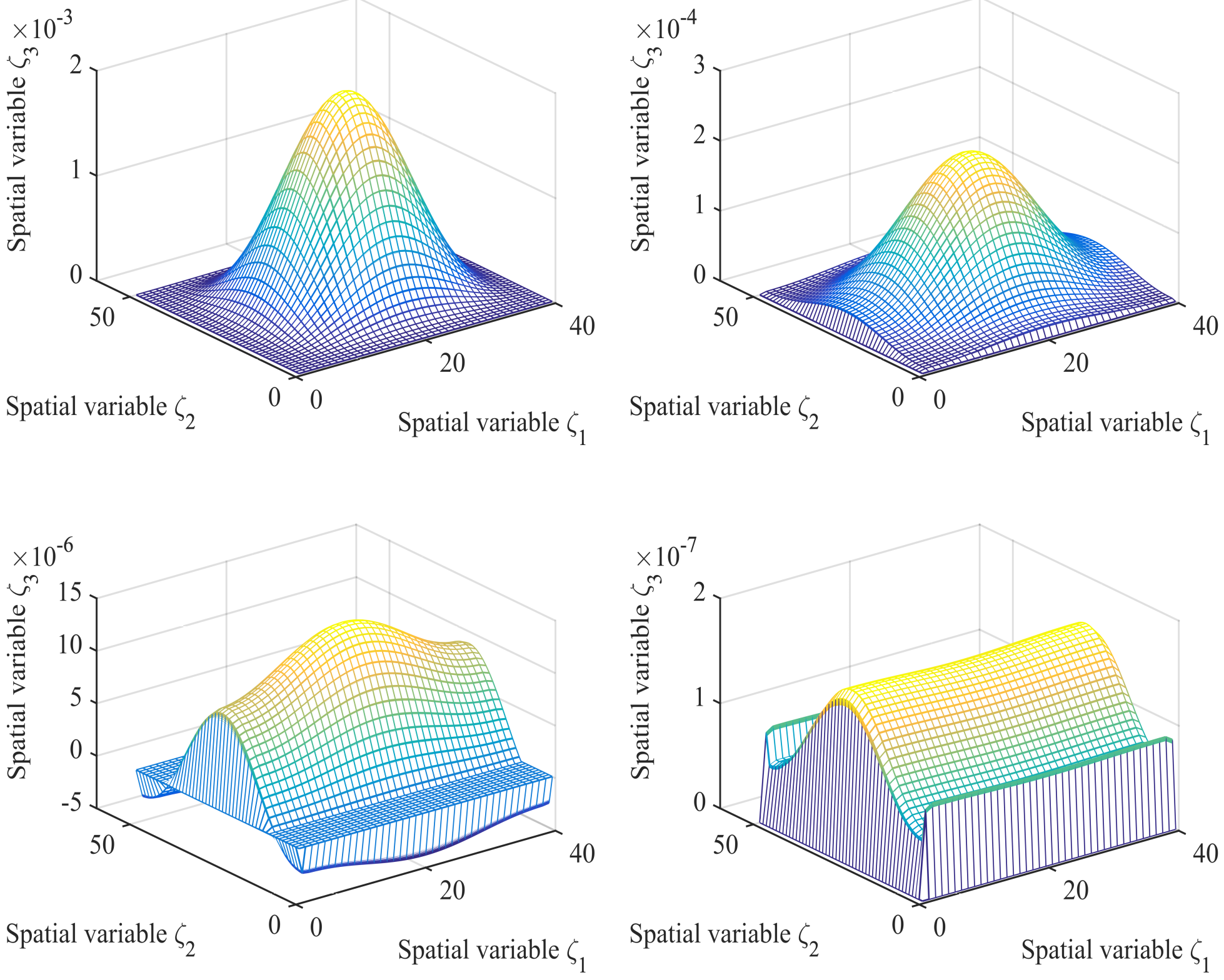
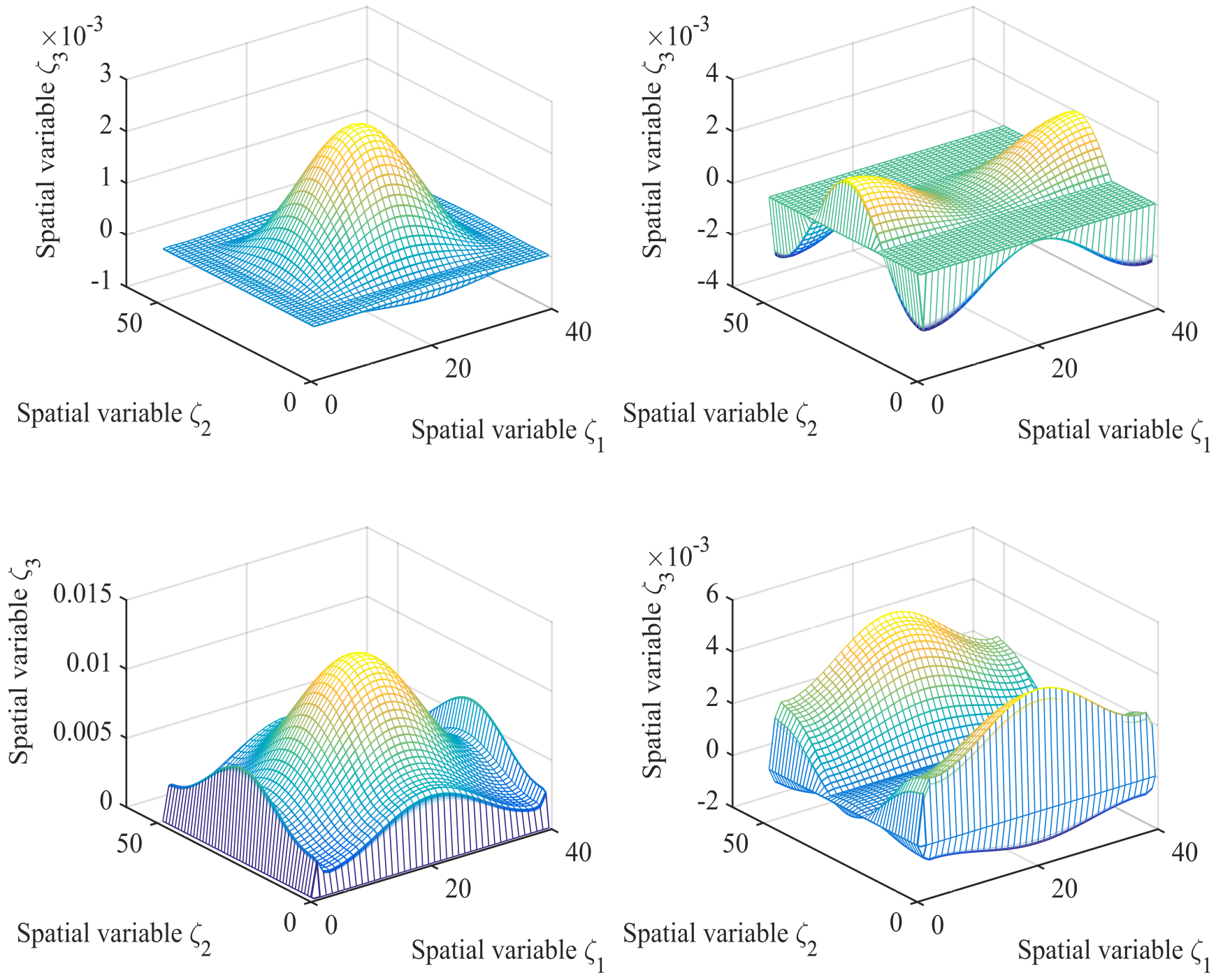
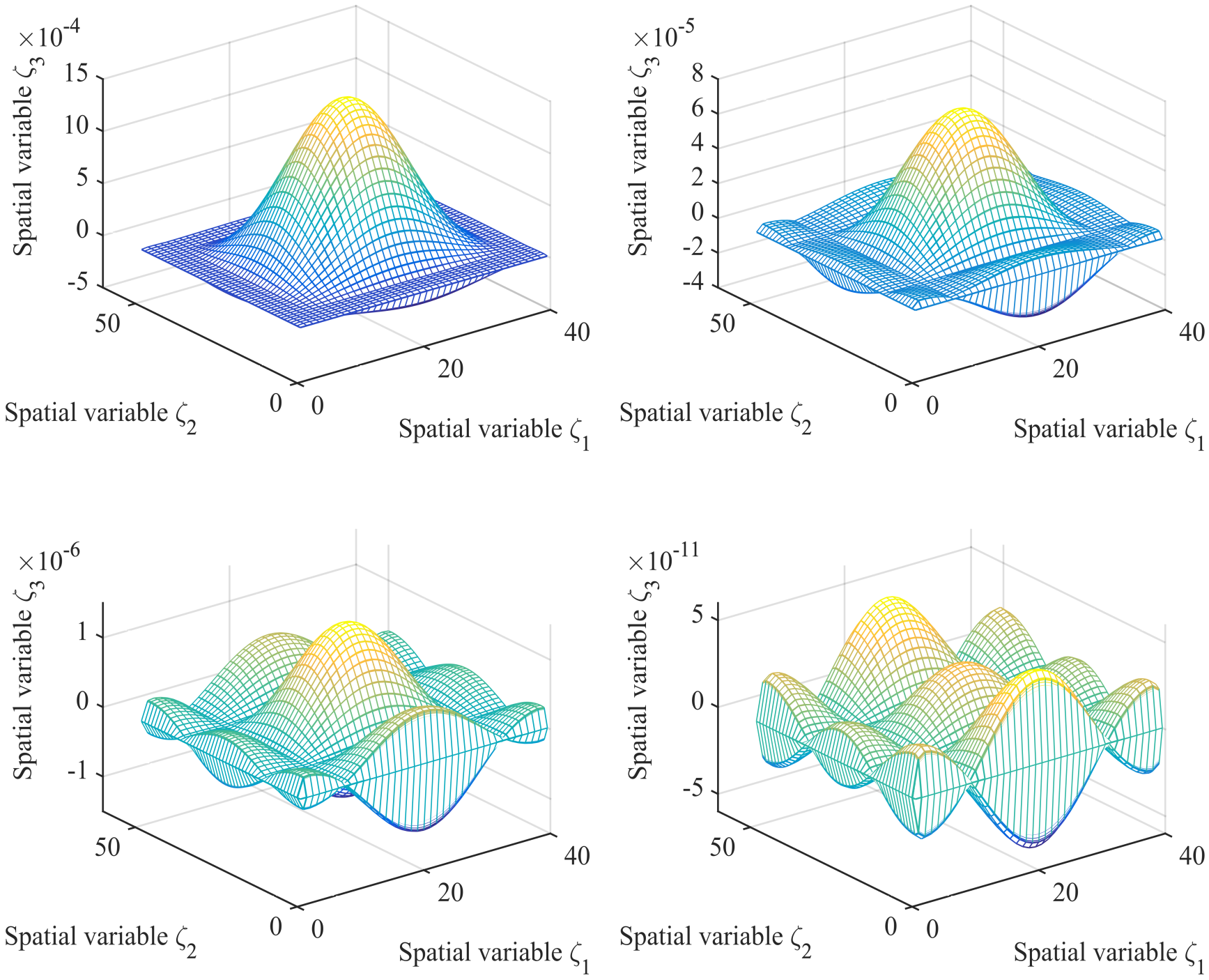
. The evolution of the 3D nonlinear distributed parameter system at four different times is shown in
Figure 2.
The coordinate system in
Figure 2 represents a three-dimensional space. Hence, the states of the system in three dimensions at time
s, respectively, need to be shown using four different spatial coordinate systems.
Two mobile sensing devices are taken into account, and their initial locations are selected as
and
. The sensor network coupling matrix
. Their spatial distribution is defined by
In this simulation, the probabilities are taken as
,
and
; the perturbation attenuation level is
;
is a saturation function written in the following:
The saturation values are taken as
. The measurement output of mobile sensors with randomly sensor saturation are depicted in
Figure 3.
The initial condition for the distributed consensus filter is selected to be
. Gain for the distributed filters is determined by
and
.
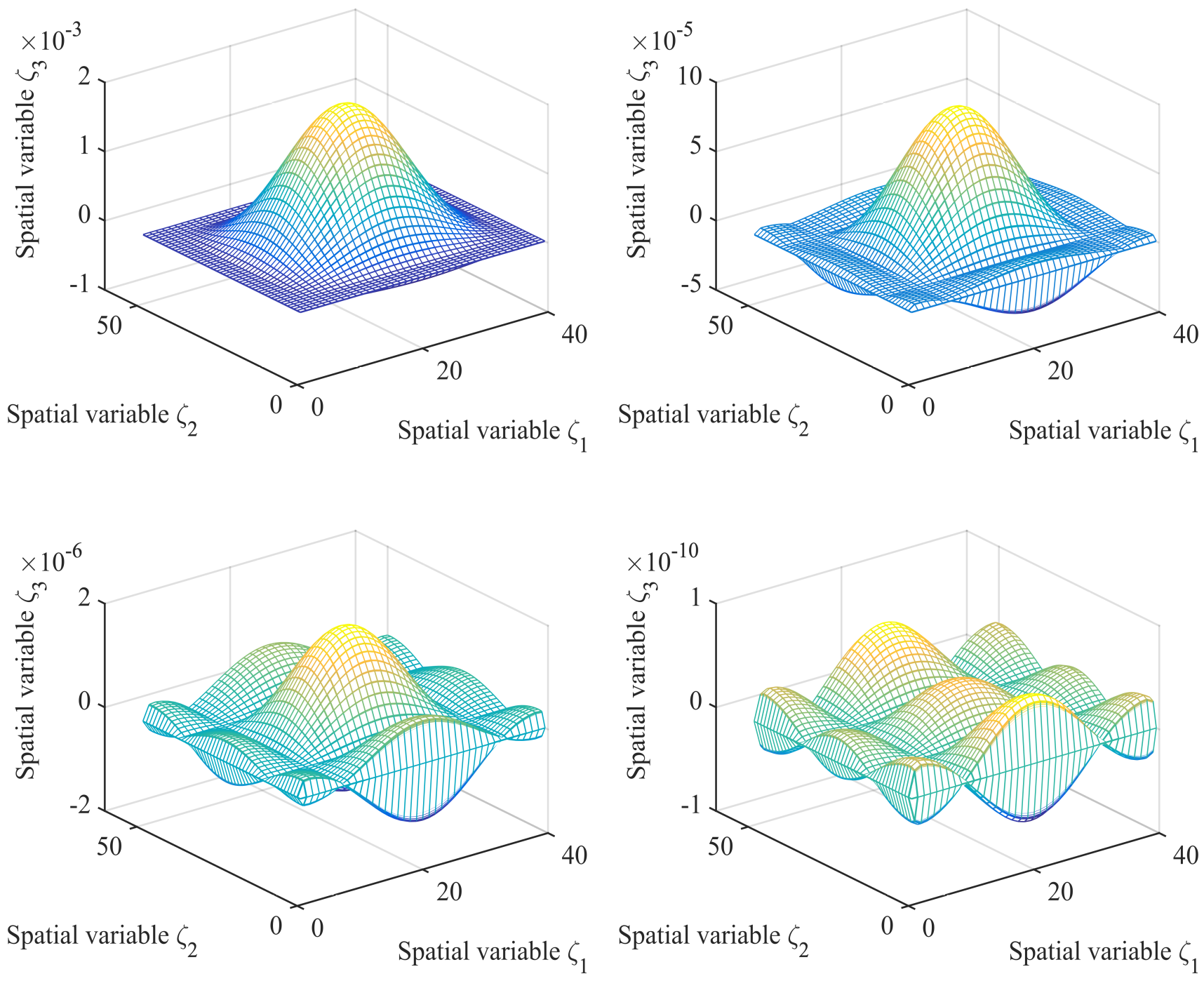
Figure 4 and
Figure 5 illustrate how the filtering errors of the two distributed
consensus filters changed at four different times in the first 5 s. After 5 s, with increasing time, their filtering errors converge rapidly to the bounds.
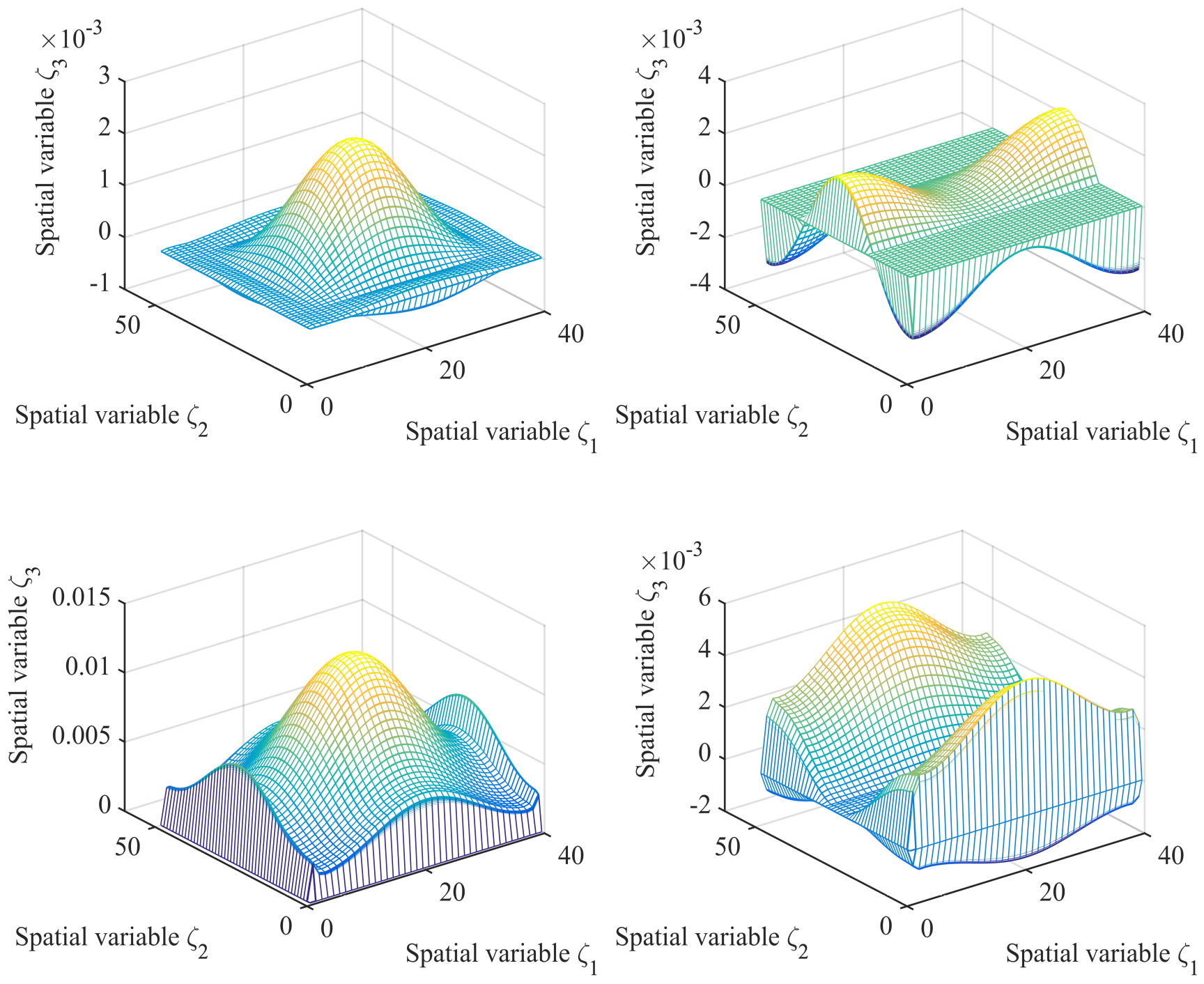
Figure 6 and
Figure 7 show the estimation results of the two distributed filters at four different times, respectively.
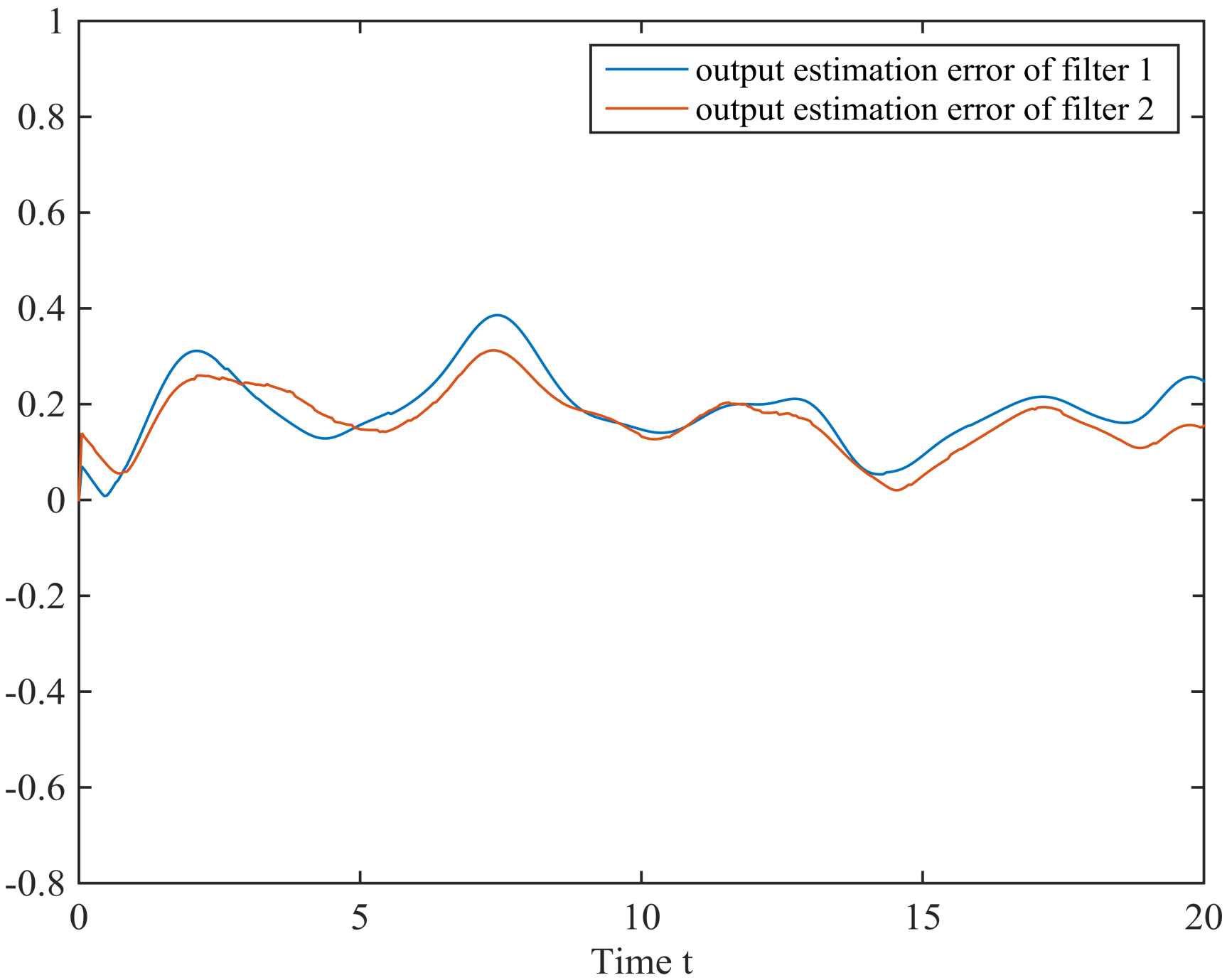
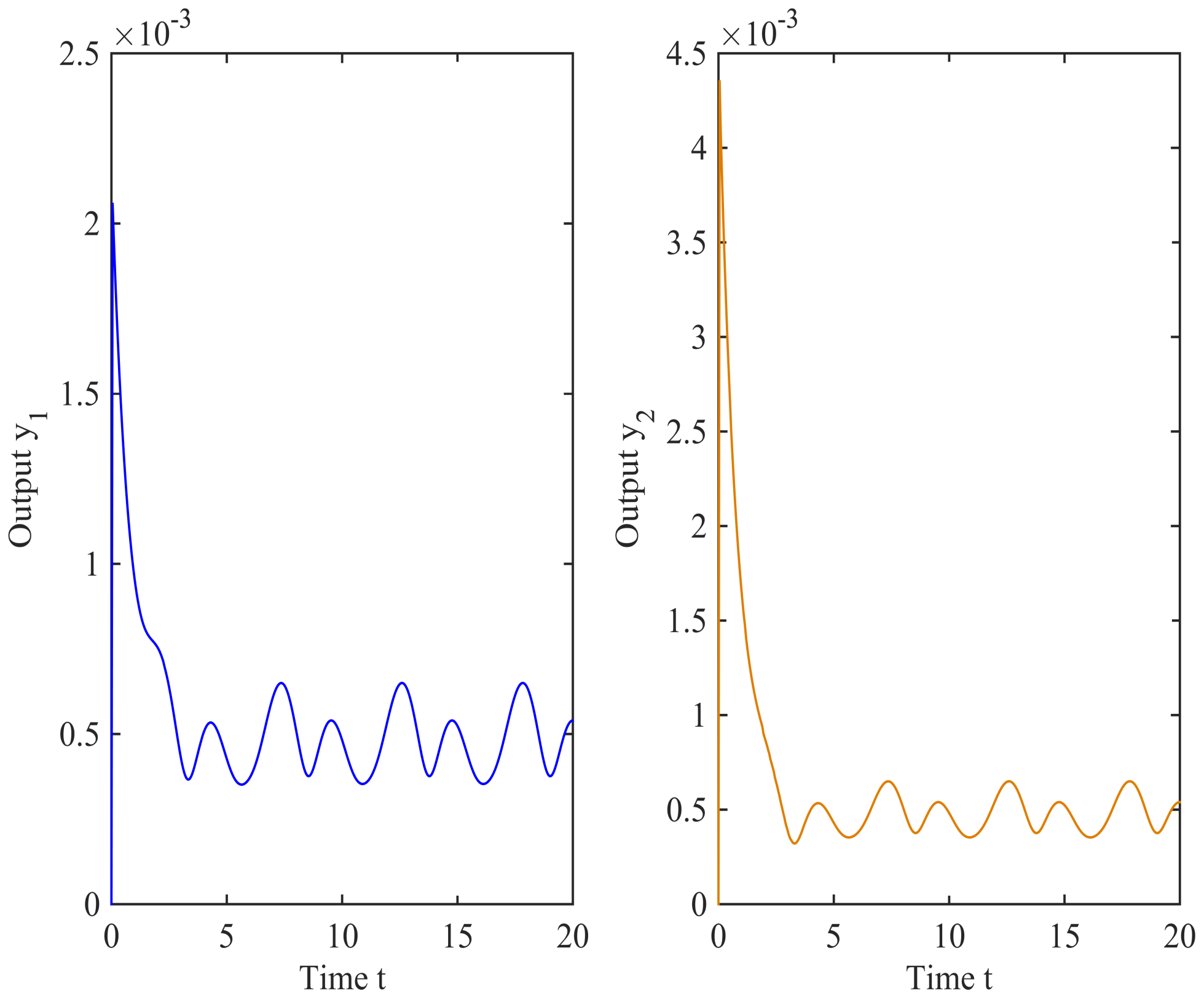
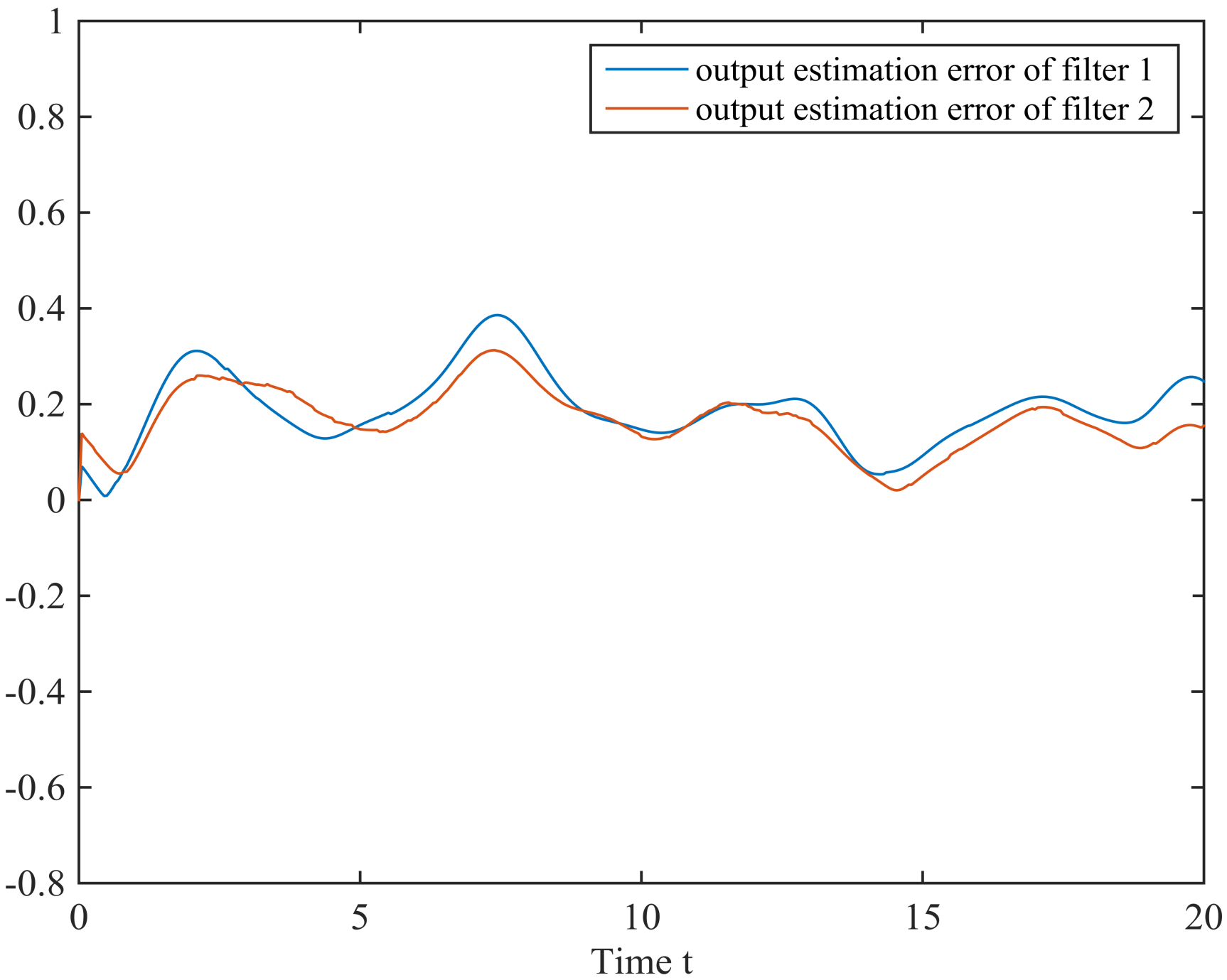
Figure 8 displays the output estimation errors for the two filters. The estimation converges to the bounded range in a short time, as can be seen in
Figure 8. The existence of the estimation error is caused by the bounded perturbation in the system. Once the perturbation decays or even disappears, then the estimation error converges rapidly to zero.
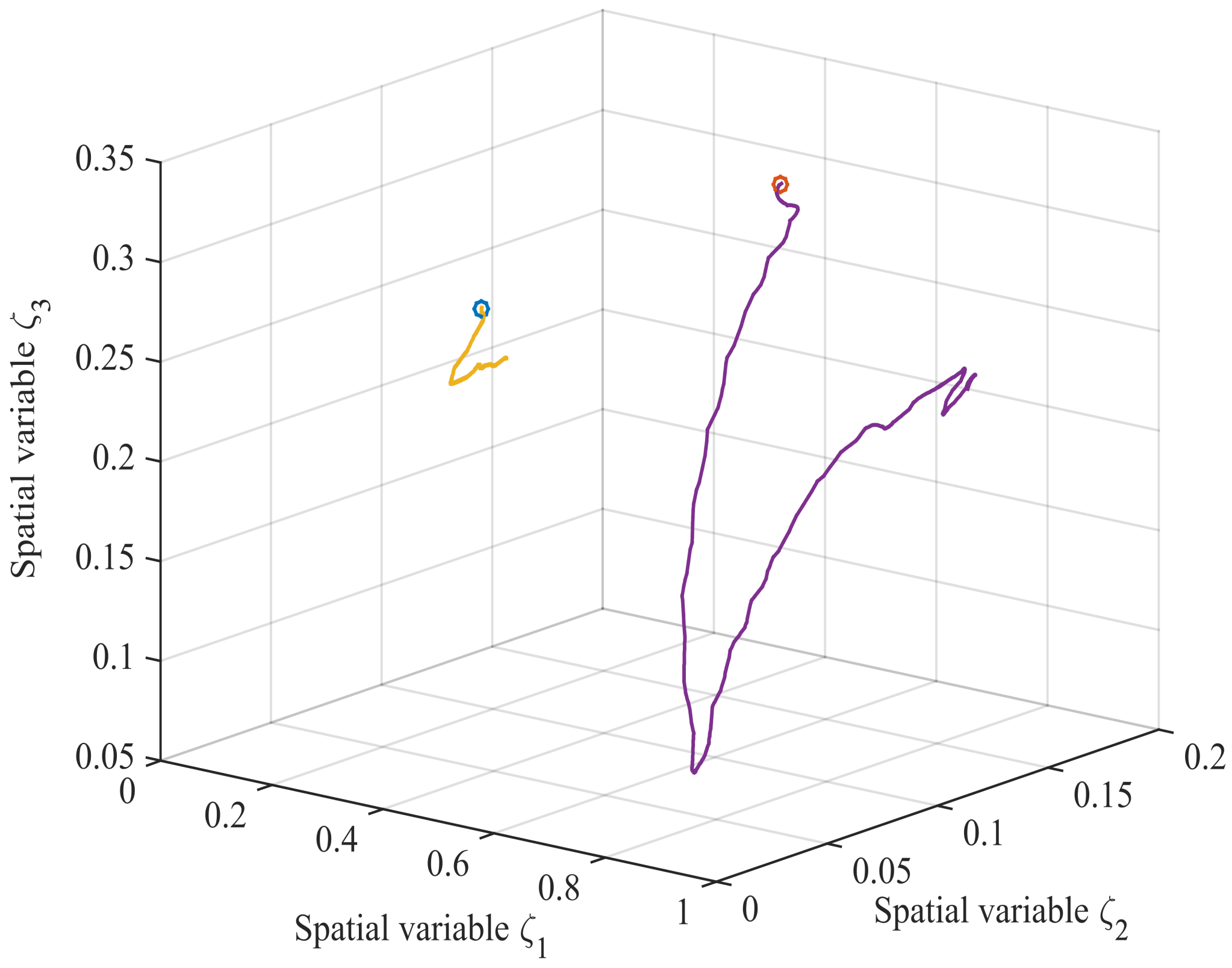
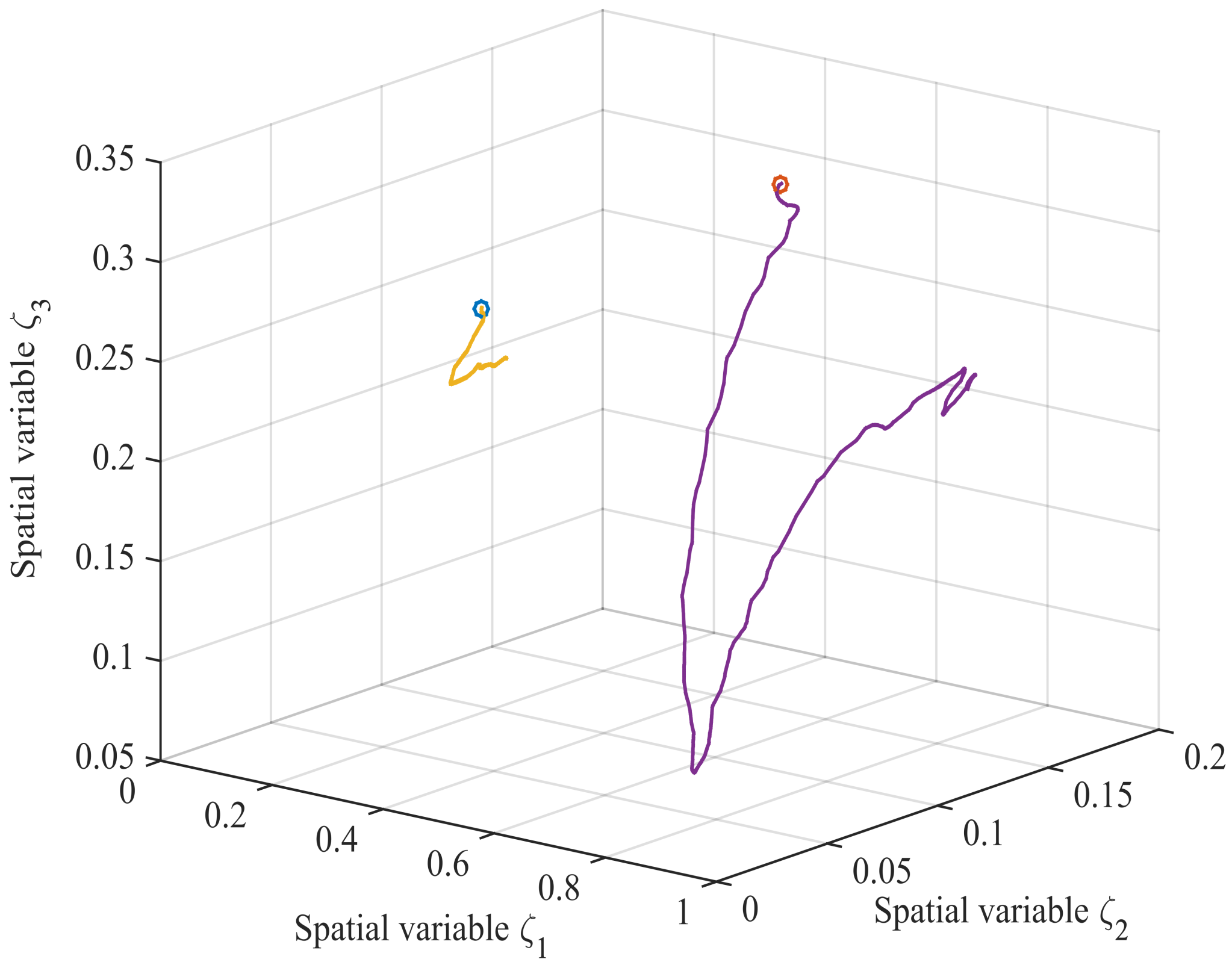
To reflect the enhanced filtering performance of the motion sensing approach, we introduce fixed sensors for comparison with mobile sensors. The two fixed sensors are located at
and
.These two locations are indicated by small circles in
Figure 9. These two spatial locations are also the initial locations before the mobile sensor moves. As a comparison with the fixed sensor, the trajectories of the two mobile sensors under velocity constraints are also shown in
Figure 9.
In
Figure 10, the effect of the evolution of the
norm of the filtering error for the two fixed sensors and the two mobile sensors is shown. The appreciable reduction of the state norm is observed for the mobile case.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}