
Reliability Assessment of an Unscented Kalman Filter by Using Ellipsoidal Enclosure Techniques


Abstract
:1. Introduction
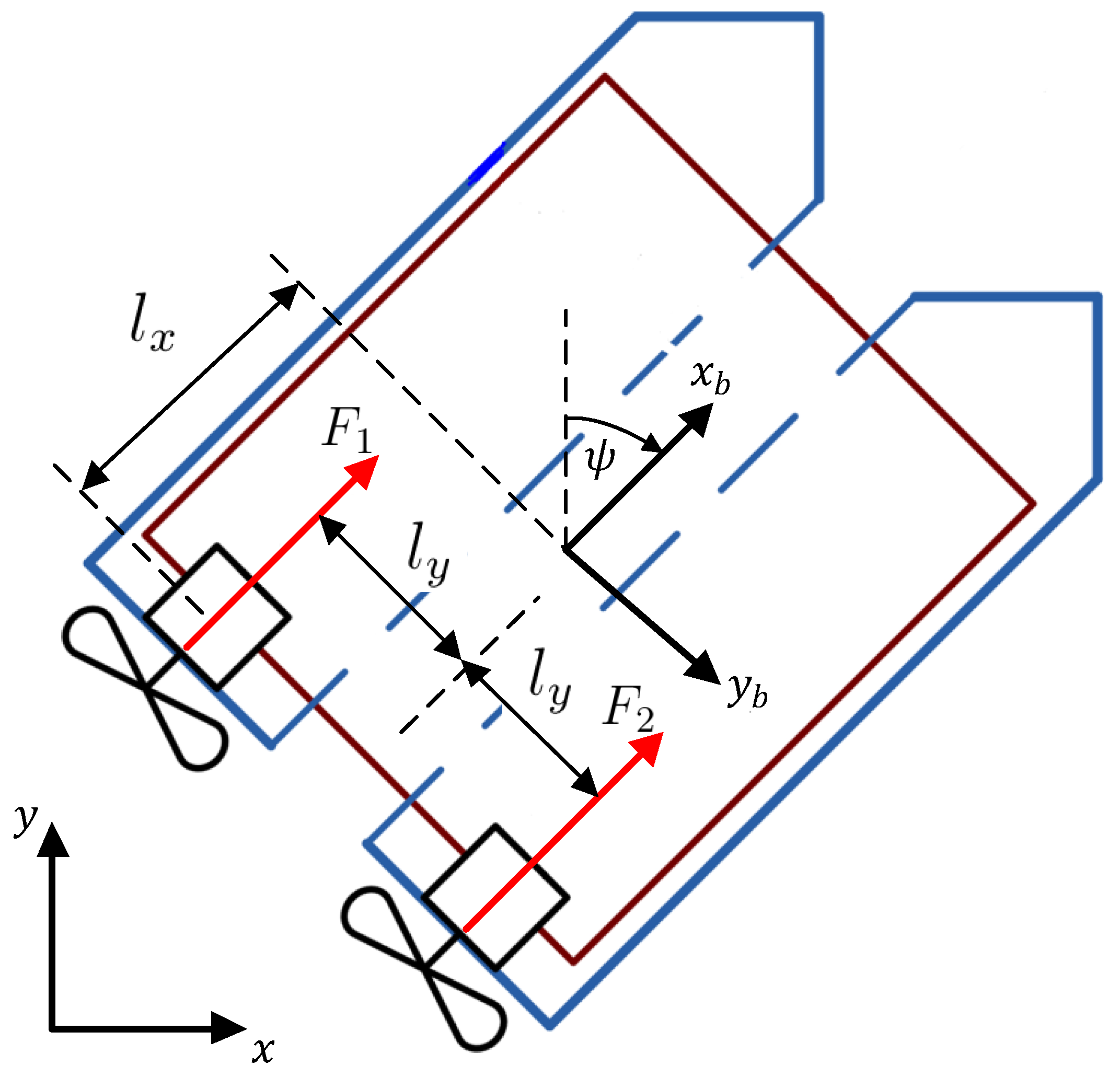
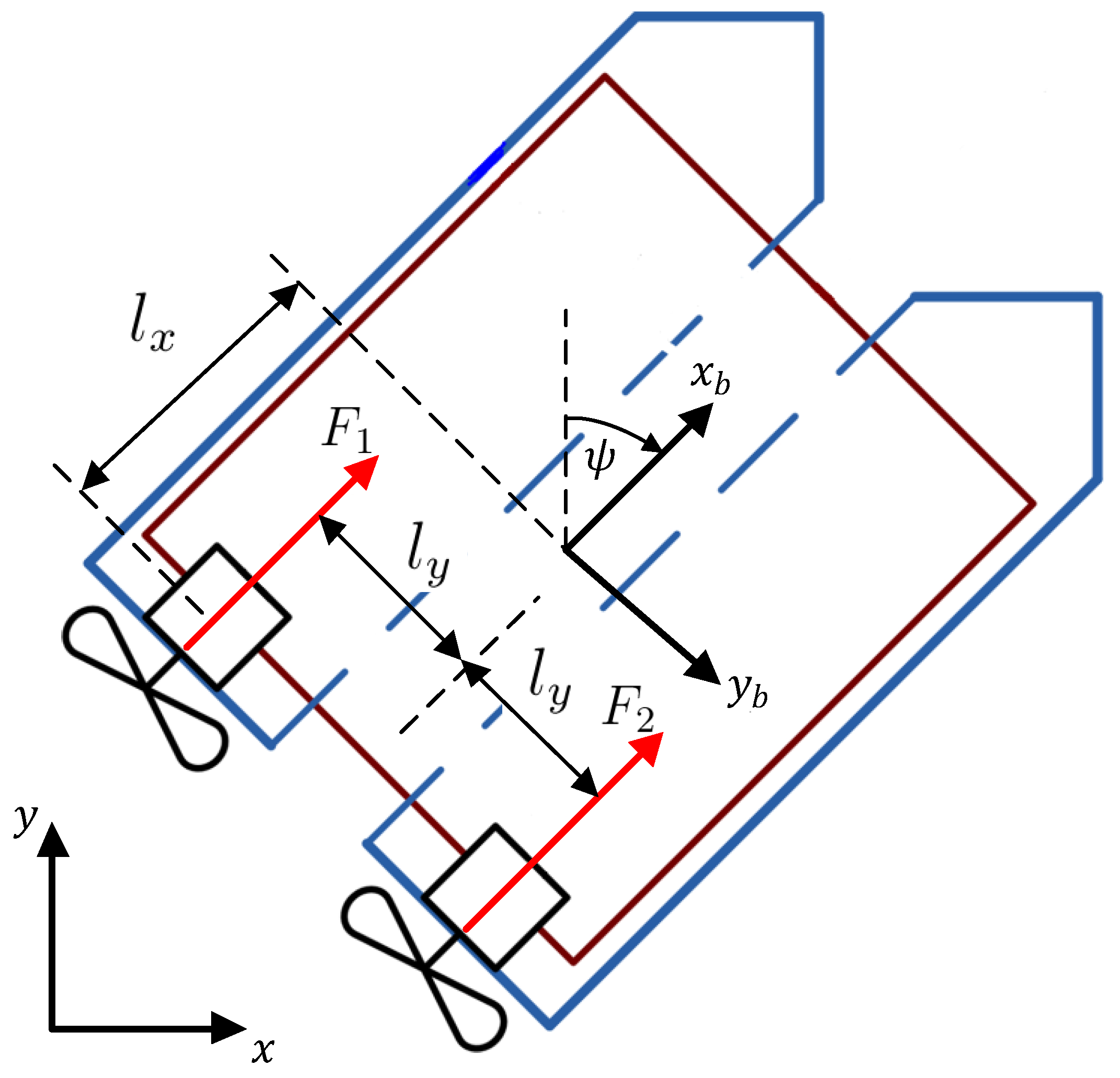
2. Modeling the Dynamics of USVs
2.1. Dynamic Equations
2.2. Propulsion
2.3. Parameter Values
2.4. Temporal Discretization and Definition of an Augmented Set of State Equations
2.5. Measurement Model
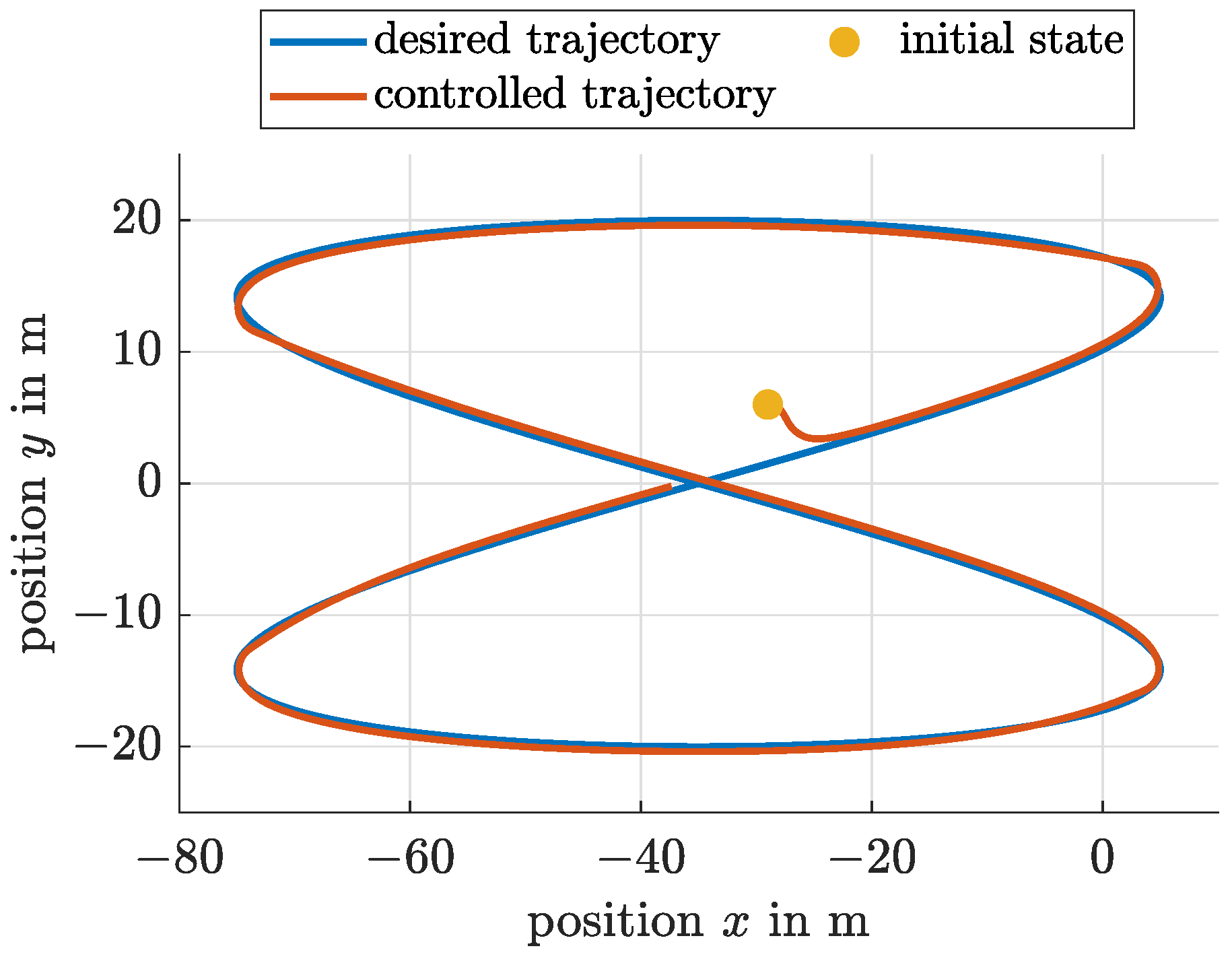
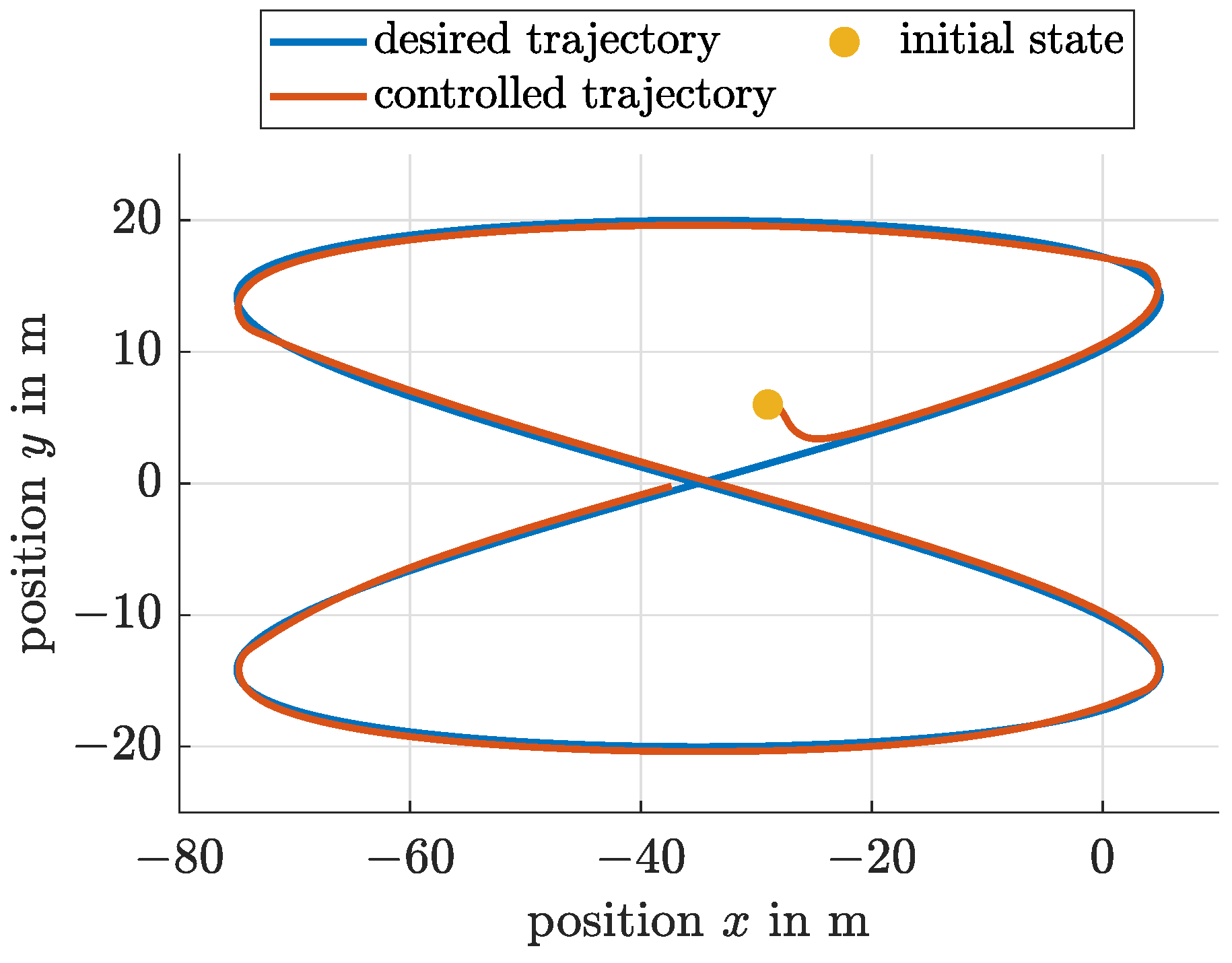
2.6. Tracking Control Using an Artificial Potential Field Approach
3. UKF State Estimation
4. Ellipsoidal Enclosure Approach for Bounding Confidence Regions
4.1. Ellipsoidal Prediction of Confidence Bounds
- P1:
- Applyto the ellipsoid in (36). The outer ellipsoid enclosure of the image set is described by an ellipsoid with the shape matrixwhere is the smallest value for which the LMIis satisfied for all , i.e., for all state realizations in the interior of an axis-aligned tight enclosure of the ellipsoid, and for all possible parameters with the shape matrix parameterization
- P2:
- Compute interval bounds for the termwhich accounts for a non-zero ellipsoid midpoint with , , and defined according to (35), (37), and (38). Inflate the ellipsoid bound described by the shape matrix (41) according towhere the interval-valued generalization of the Euclidean norm operator in (46) is defined in [22].
- P3:
- Compute the updated ellipsoid midpointand the updated square root of its shape matrix
- P4:
- Compute an ellipsoidal enclosure of the Minkowski sum of the ellipsoid and the ellipsoid enclosing the term according towith the new midpointand the updated square root of the shape matrix (resp., square root of the new covariance matrix)which is given in closed-form by the nearly optimal shape matrix (i.e., close to the minimum volume ellipsoid)with
4.2. Ellipsoidal Innovation Stage with Predefined Confidence Bounds
- C1:
- Determine the common midpoint for the desired outer bound of the intersection that must be included in all ellipsoids to be intersected (after the ellipsoid widening operations according to Equations (51) and (52) of [33]);
- C2:
- Determine the shape matrices for the outer ellipsoid bound according to the computation of Dikin ellipsoids according to [43].
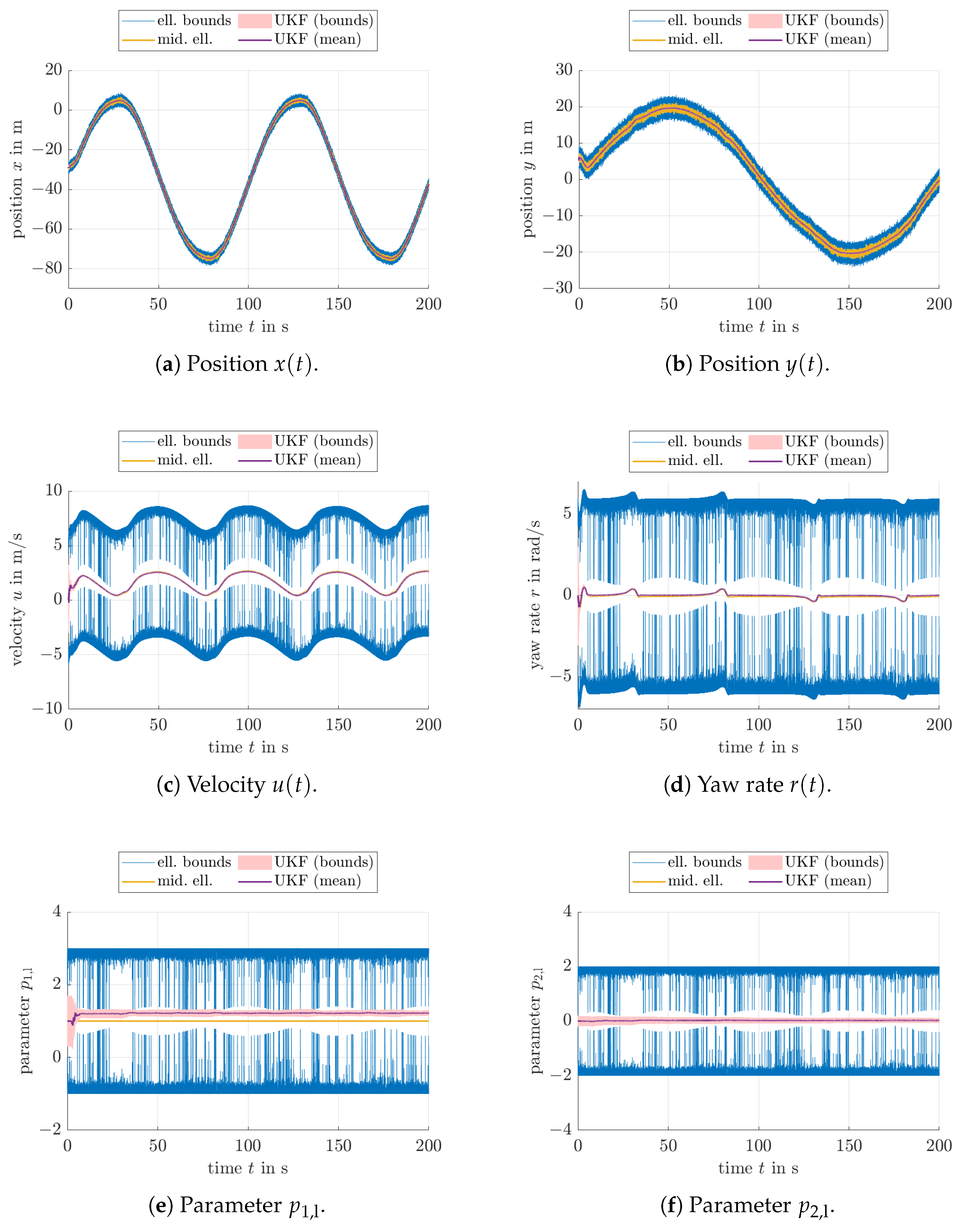
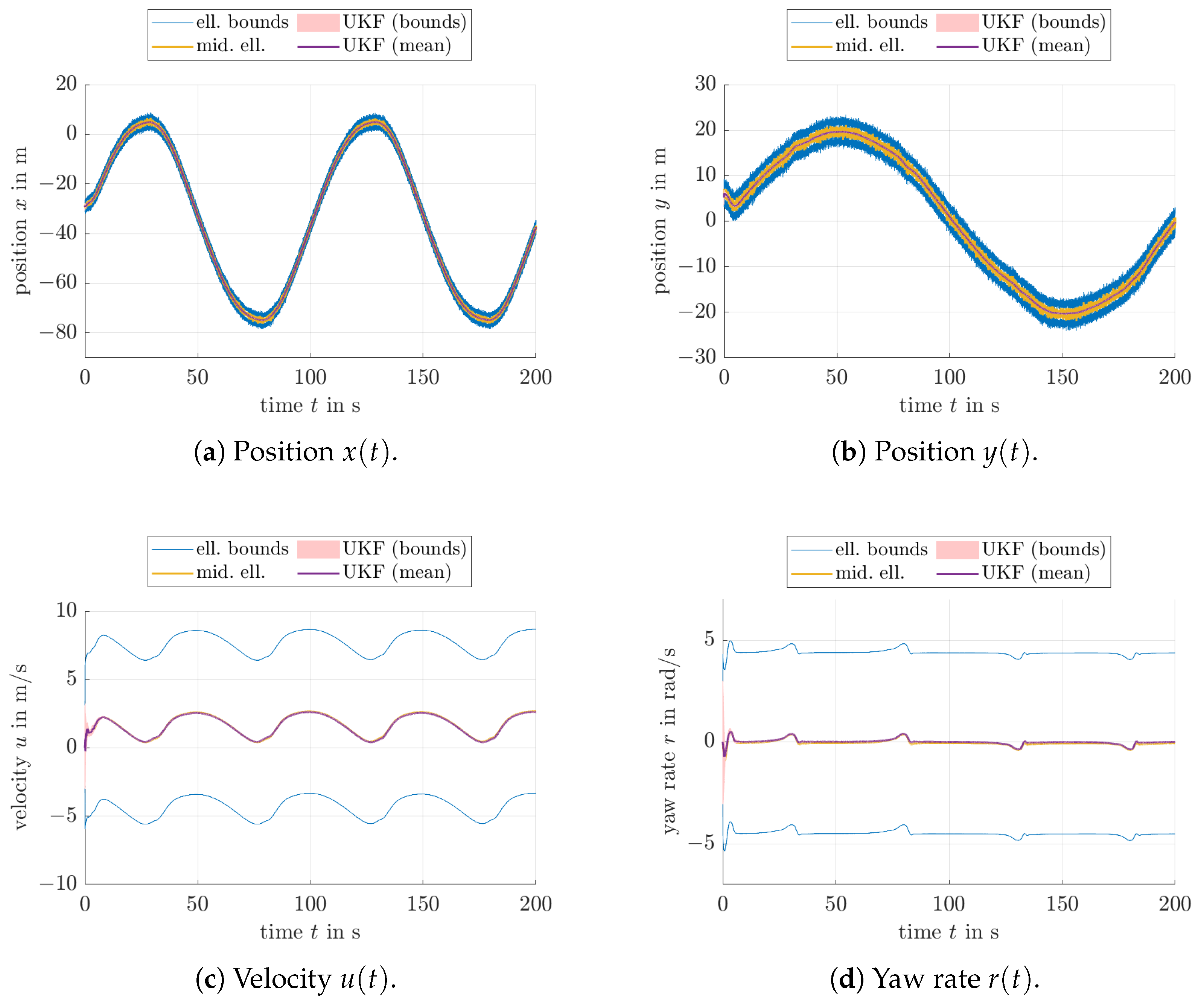
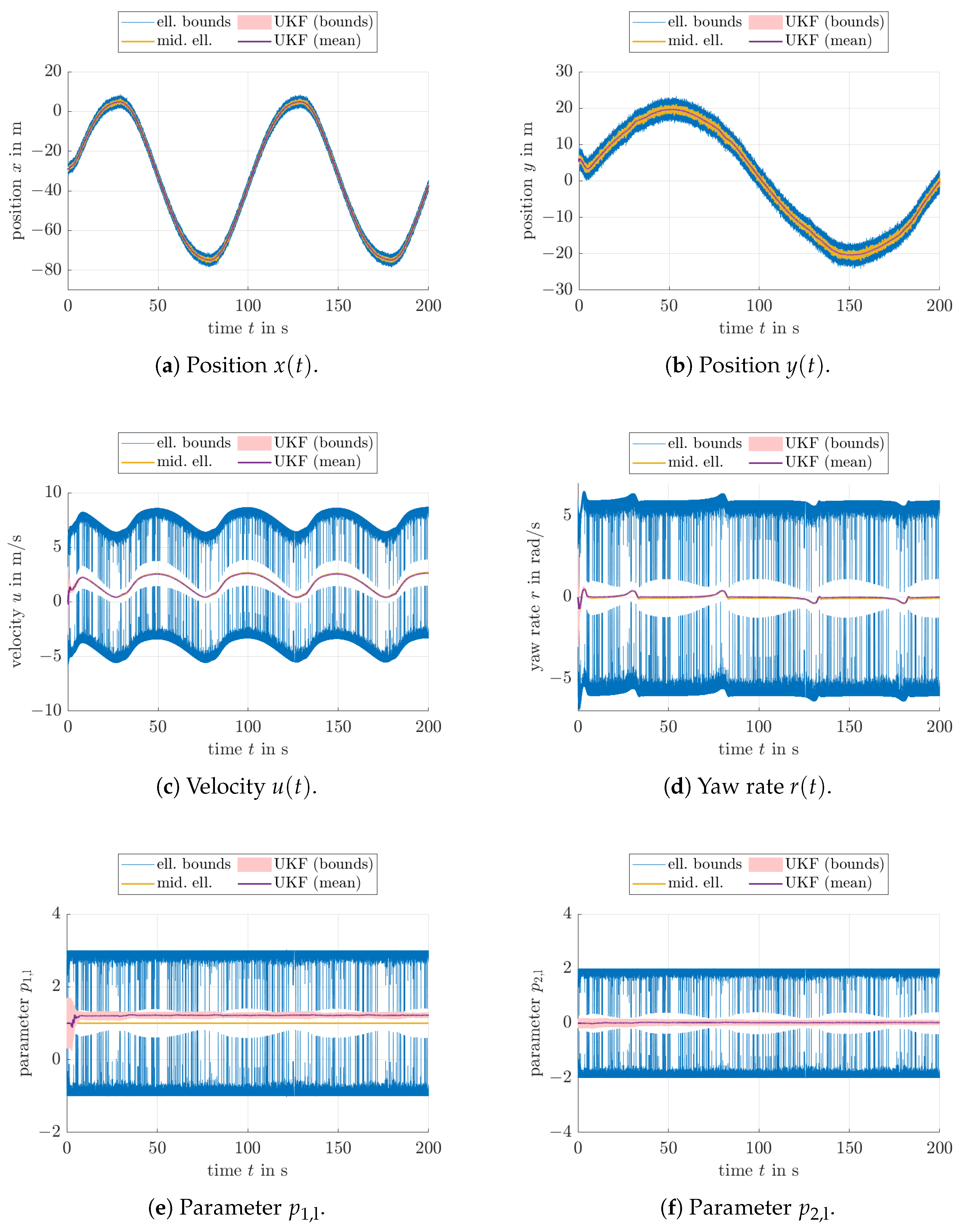
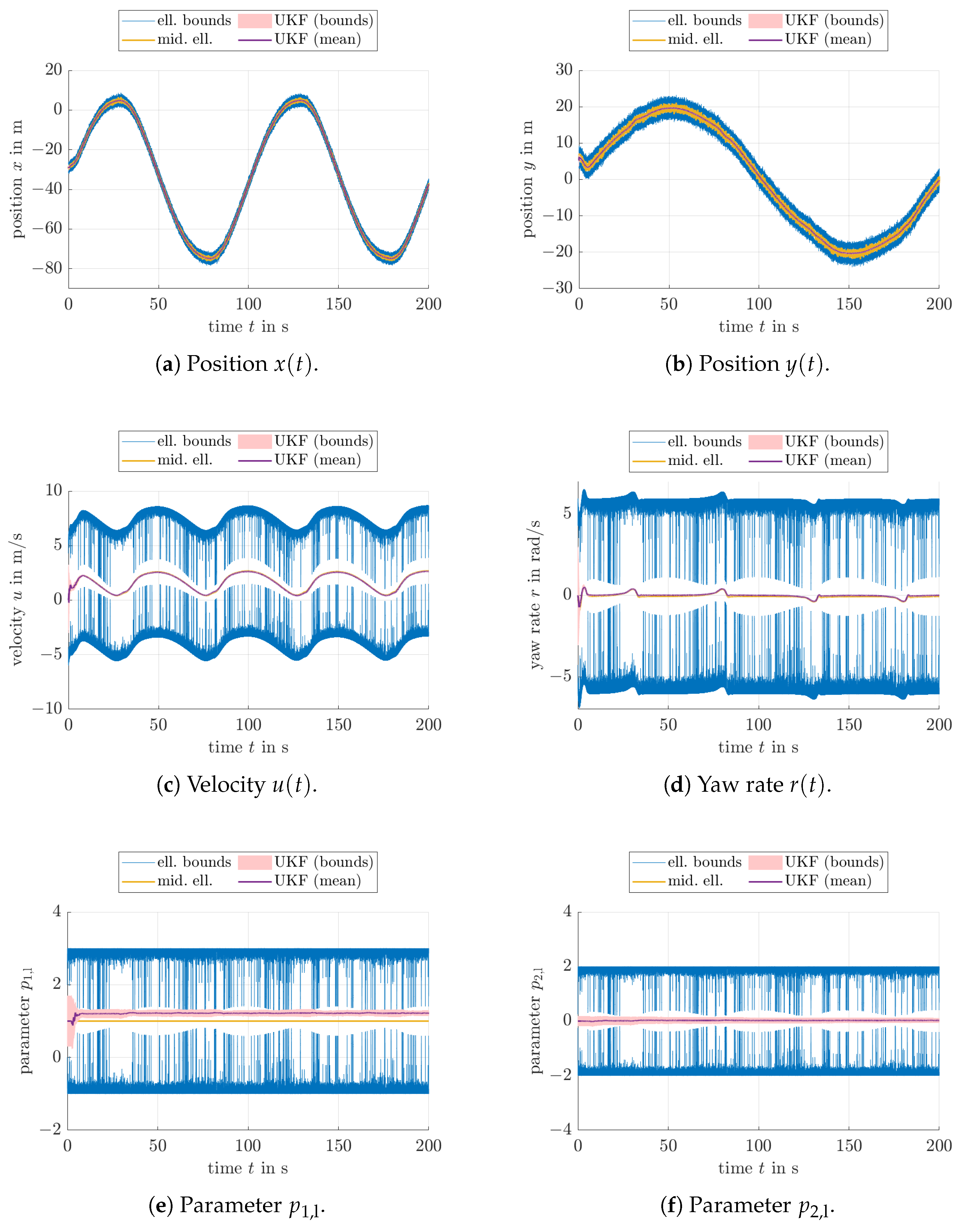
5. Simulation Results
6. Conclusions and Outlook on Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Maybeck, P.S. Stochastic Models, Estimation, and Control, Volume 1; Academic Press, Inc.: New York, NY, USA, 1979. [Google Scholar]
- Maybeck, P.S. Stochastic Models, Estimation, and Control, Volume 2; Academic Press, Inc.: New York, NY, USA, 1982. [Google Scholar]
- Maybeck, P.S. Stochastic Models, Estimation, and Control, Volume 3; Academic Press, Inc.: New York, NY, USA, 1982. [Google Scholar]
- Anderson, B.D.O.; Moore, J.B. Optimal Filtering; Dover Publications, Inc.: Mineola, NY, USA, 2005. [Google Scholar]
- Papoulis, A. Probability, Random Variables, and Stochastic Processes; McGraw-Hill: New York, NY, USA, 1991. [Google Scholar]
- Stengel, R. Optimal Control and Estimation; Dover Publications, Inc.: Mineola, NY, USA, 1994. [Google Scholar]
- Åström, K.J. Introduction to Stochastic Control Theory; Mathematics in Science and Engineering; Academic Press: New York, NY, USA, 1970. [Google Scholar]
- Hermann, R.; Krener, A.J. Nonlinear Controllability and Observability. IEEE Trans. Autom. Control 1977, 22, 728–740. [Google Scholar] [CrossRef] [Green Version]
- Sontag, E. Mathematical Control Theory—Deterministic Finite Dimensional Systems; Springer: New York, NY, USA, 1998. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME-J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Daum, F. Nonlinear Filters: Beyond the Kalman Filter. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 57–69. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A New Approach for the Nonlinear Transformation of Means and Covariances in Filters and Estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]
- Uhlmann, J.K. First-Hand: The Unscented Transform. Available online: https://ethw.org/First-Hand:The_Unscented_Transform (accessed on 26 June 2022).
- Wan, E.A.; Van Der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No. 00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Sorenson, H.W.; Alspach, D.L. Recursive Bayesian Estimation Using Gaussian Sums. Automatica 1971, 7, 465–479. [Google Scholar] [CrossRef]
- Alspach, D.; Sorenson, H. Nonlinear Bayesian Estimation Using Gaussian Sum Approximations. IEEE Trans. Autom. Control 1972, 17, 439–448. [Google Scholar] [CrossRef]
- Terejanu, G.; Singla, P.; Singh, T.; Scott, P.D. Adaptive Gaussian Sum Filter for Nonlinear Bayesian Estimation. IEEE Trans. Autom. Control 2011, 56, 2151–2156. [Google Scholar] [CrossRef]
- Rauh, A.; Briechle, K.; Hanebeck, U.D. Nonlinear Measurement Update and Prediction: Prior Density Splitting Mixture Estimator. In Proceedings of the 2009 IEEE Control Applications, (CCA) & Intelligent Control, (ISIC), St. Petersburg, Russia, 8–10 July 2009. [Google Scholar]
- Del Moral, P. Non Linear Filtering: Interacting Particle Solution. Markov Process. Relat. Fields 1996, 2, 555–580. [Google Scholar]
- Dekhici, B.; Benyahiya, B.; Cherki, B. Forecast of Chemostat Dynamics Using Data-Driven Approach. In Proceedings of the 2021 International Conference on Control, Automation and Diagnosis (ICCAD), Grenoble, France, 3–5 November 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Koopman, B.O.; Neumann, J.V. Dynamical Systems of Continuous Spectra. Proc. Natl. Acad. Sci. USA 1932, 18, 255–263. [Google Scholar] [CrossRef] [Green Version]
- Rauh, A.; Jaulin, L. A Computationally Inexpensive Algorithm for Determining Outer and Inner Enclosures of Nonlinear Mappings of Ellipsoidal Domains. Int. J. Appl. Math. Comput. Sci. AMCS 2021, 31, 399–415. [Google Scholar]
- Rauh, A.; Chevet, T.; Dinh, T.N.; Marzat, J.; Raïssi, T. Robust Iterative Learning Observers Based on a Combination of Stochastic Estimation Schemes and Ellipsoidal Calculus. In Proceedings of the 2022 25th International Conference on Information Fusion (FUSION), Linköping, Sweden, 4–7 July 2022. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1994. [Google Scholar]
- Wirtensohn, S.; Reuter, J.; Blaich, M.; Schuster, M.; Hamburger, O. Modelling and Identification of a Twin Hull-Based Autonomous Surface Craft. In Proceedings of the 2013 18th International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 26–29 August 2013; pp. 121–126. [Google Scholar]
- Wirtensohn, S.; Wenzl, H.; Tietz, T.; Reuter, J. Parameter Identification and Validation Analysis for a Small USV. In Proceedings of the 2015 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 24–27 August 2015; pp. 701–706. [Google Scholar]
- Khatib, O. The Potential Field Approach Additionally, Operational Space Formulation In Robot Control. In Adaptive and Learning Systems: Theory and Applications; Narendra, K.S., Ed.; Springer: Boston, MA, USA, 1986; pp. 367–377. [Google Scholar]
- Tanaka, Y.; Tsuji, T.; Kaneko, M. Dynamic Control of Redundant Manipulators Using the Artificial Potential Field Approach with Time Scaling. Artif. Life Robot. 1999, 3, 79–85. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, M.; Wang, X.; He, S.; He, J.; Xu, Z. An Improved Artificial Potential Field Method of Trajectory Planning and Obstacle Avoidance for Redundant Manipulators. Int. J. Adv. Robot. Syst. 2018, 15, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Rauh, A.; Gourret, Y.; Lagattu, K.; Hummes, B.; Jaulin, L.; Reuter, J.; Wirtensohn, S.; Hoher, P. Experimental Validation of Ellipsoidal Techniques for State Estimation in Marine Applications. Algorithms 2022, 15, 162. [Google Scholar] [CrossRef]
- Rohou, S.; Jaulin, L.; Mihaylova, L.; Le Bars, F.; Veres, S.M. Guaranteed Computation of Robot Trajectories. Robot. Auton. Syst. 2017, 93, 76–84. [Google Scholar] [CrossRef] [Green Version]
- Rauh, A.; Rohou, S.; Jaulin, L. An Ellipsoidal Predictor–Corrector State Estimation Scheme for Linear Continuous-Time Systems with Bounded Parameters and Bounded Measurement Errors. Front. Control Eng. 2022, 3, 785795. [Google Scholar] [CrossRef]
- Jaulin, L.; Kieffer, M.; Didrit, O.; Walter, É. Applied Interval Analysis; Springer: London, UK, 2001. [Google Scholar]
- Rohou, S.; Jaulin, L. Exact Bounded-Error Continuous-Time Linear State Estimator. Syst. Control Lett. 2021, 153, 104951. [Google Scholar] [CrossRef]
- Kühn, W. Rigorous Error Bounds for the Initial Value Problem Based on Defect Estimation. Technical Report. 1999. Available online: http://www.decatur.de/personal/papers/defect.zip (accessed on 11 November 2020).
- Kurzhanskii, A.B.; Vályi, I. Ellipsoidal Calculus for Estimation and Control; Birkhäuser: Boston, MA, USA, 1997. [Google Scholar]
- Rauh, A.; Bourgois, A.; Jaulin, L. Union and Intersection Operators for Thick Ellipsoid State Enclosures: Application to Bounded-Error Discrete-Time State Observer Design. Algorithms 2021, 14, 88. [Google Scholar] [CrossRef]
- John, F. Extremum Problems with Inequalities as Subsidiary Conditions. In Studies and Essays Presented to R. Courant on his 60th Birthday; Interscience Publishers, Inc.: New York, NY, USA, 1948; pp. 187–204. [Google Scholar]
- Wang, B.; Shi, W.; Miao, Z. Confidence Analysis of Standard Deviational Ellipse and Its Extension into Higher Dimensional Euclidean Space. PLoS ONE 2015, 10, e0118537. [Google Scholar] [CrossRef] [PubMed]
- Halder, A. On the Parameterized Computation of Minimum Volume Outer Ellipsoid of Minkowski Sum of Ellipsoids. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 4040–4045. [Google Scholar] [CrossRef] [Green Version]
- Noack, B.; Klumpp, V.; Hanebeck, U.D. State Estimation with Sets of Densities Considering Stochastic and Systematic Errors. In Proceedings of the 2009 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 1751–1758. [Google Scholar]
- Henrion, D.; Tarbouriech, S.; Arzelier, D. LMI Approximations for the Radius of the Intersection of Ellipsoids: Survey. J. Optim. Theory Appl. 2001, 108, 1–28. [Google Scholar] [CrossRef]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems: An Introduction with Applications; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Unit |
|---|---|---|
| m | Displacement | |
| -coordinate of center of gravity | ||
| Moment of inertia w.r.t. the axis (incl. hydrodynamic effects) | ||
| Hydrodynamic mass in -direction | ||
| Hydrodynamic mass in -direction | ||
| Coupling coefficient of hydrodynamic mass | ||
| Coupling coefficient of hydrodynamic mass | ||
| Linear hydrodynamic damping in -direction | ||
| Linear hydrodynamic damping in -direction | ||
| Linear hydrodynamic damping around -axis | ||
| Coupling coefficient of hydrodynamic damping | ||
| Coupling coefficient of hydrodynamic damping | ||
| Coupling coefficient of hydrodynamic damping | ||
| Coupling coefficient of hydrodynamic damping | ||
| Coupling coefficient of hydrodynamic damping | ||
| Quadratic hydrodynamic damping in -direction | ||
| Quadratic hydrodynamic damping in -direction | ||
| Quadratic hydrodynamic damping around -axis | ||
| Thrust parameter (forward thrust) | − | |
| Thrust parameter (forward thrust and velocity) | − | |
| Thrust parameter (backward thrust) | − | |
| Thrust parameter (backward thrust and velocity) | − |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rauh, A.; Wirtensohn, S.; Hoher, P.; Reuter, J.; Jaulin, L. Reliability Assessment of an Unscented Kalman Filter by Using Ellipsoidal Enclosure Techniques. Mathematics 2022, 10, 3011. https://doi.org/10.3390/math10163011
Rauh A, Wirtensohn S, Hoher P, Reuter J, Jaulin L. Reliability Assessment of an Unscented Kalman Filter by Using Ellipsoidal Enclosure Techniques. Mathematics. 2022; 10(16):3011. https://doi.org/10.3390/math10163011
Chicago/Turabian StyleRauh, Andreas, Stefan Wirtensohn, Patrick Hoher, Johannes Reuter, and Luc Jaulin. 2022. "Reliability Assessment of an Unscented Kalman Filter by Using Ellipsoidal Enclosure Techniques" Mathematics 10, no. 16: 3011. https://doi.org/10.3390/math10163011
APA StyleRauh, A., Wirtensohn, S., Hoher, P., Reuter, J., & Jaulin, L. (2022). Reliability Assessment of an Unscented Kalman Filter by Using Ellipsoidal Enclosure Techniques. Mathematics, 10(16), 3011. https://doi.org/10.3390/math10163011