
Visibility Adaptation in Ant Colony Optimization for Solving Traveling Salesman Problem



Abstract
:1. Introduction
2. TSP and Recent Methods to Solve It
2.1. TSP and Its Importance
2.2. Solving TSP with ACO and Its Updated Models
2.3. Solving TSP with Other Prominent Bio-Inspired Methods
3. ACO with Adaptive Visibility (ACOAV) for TSP
3.1. Review of Conventional ACO
3.2. Adaptive Visibility Integration to ACO for TSP
3.2.1. Population Initialization
3.2.2. Adaptive Visibility (AV) Heuristic and Formulation
3.2.3. Partial Solution Update with AV
3.2.4. 3-Opt Algorithm Adaptation
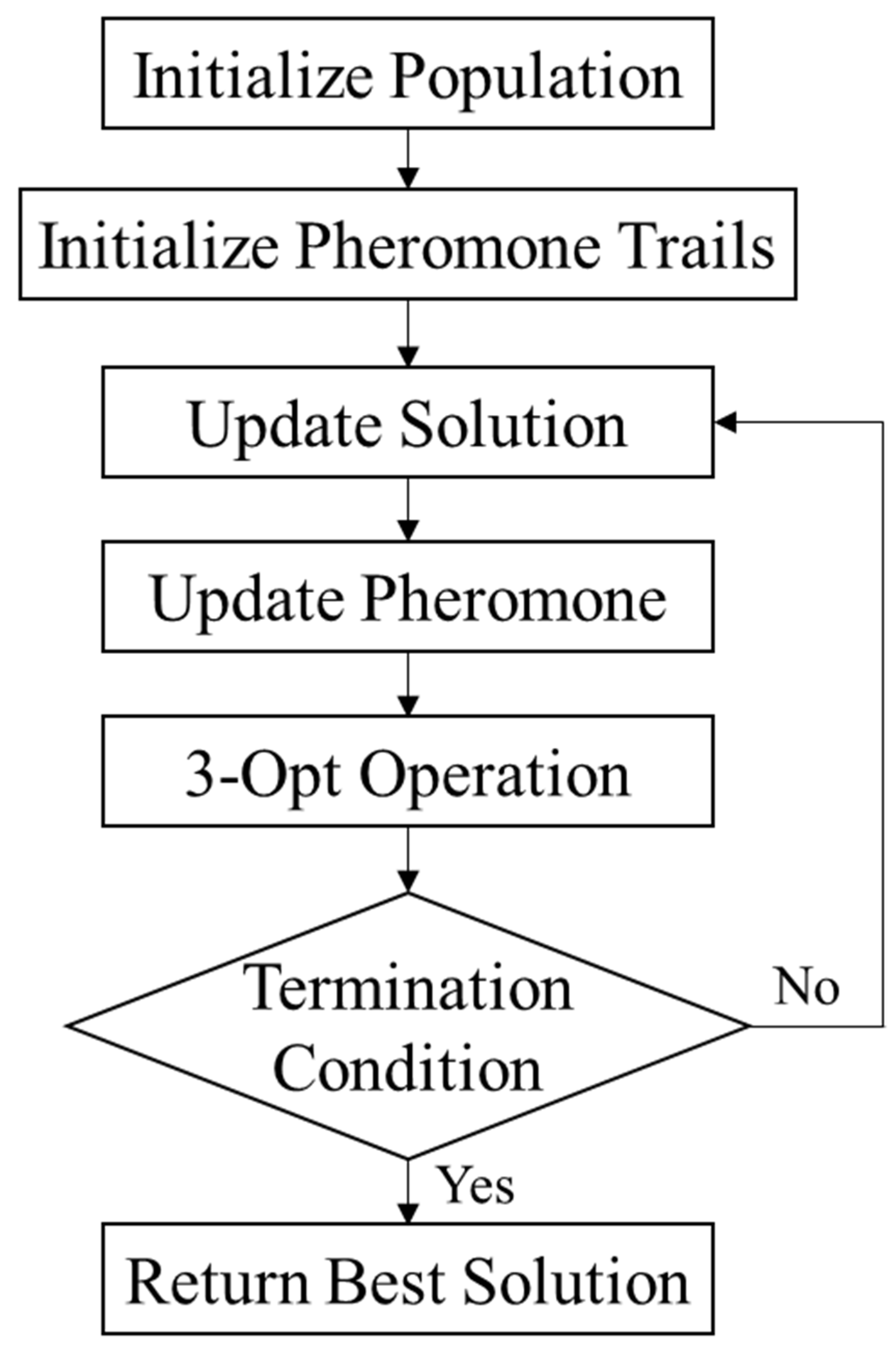
3.3. ACOAV Algorithm
| Algorithm 1 ACOAV | |||
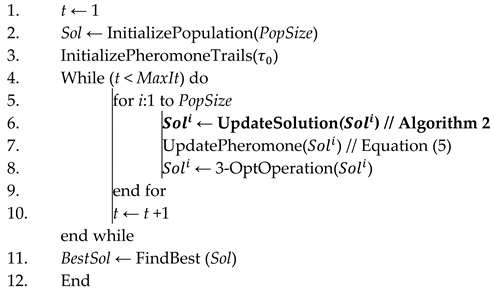 | |||
| Algorithm 2 UpdateSolution()//Partial Solution Update | |||
| 1. | TempSol | ||
| 2. | r1 ← RandInt(1, NoOfCities), r2 ← RandInt(1, NoOfCities) | ||
| 3. | r ← r1 + 1 | ||
| 4. | CitiesToOrder ← Ø | ||
| 5. | while (r != r2) do | ||
| 6. | CitiesToOrder ← CitiesToOrder ∪ {TempSol.city[r]} | ||
| 7. | if (r < NoOfCities) | ||
| 8. | r ← r + 1 // Increase the index number by one | ||
| 9. | else | ||
| 10. | r ← 1//Reset the index number to start from the first visited city | ||
| 11. | end if | ||
| 12. | end while | ||
| 13. | r ← r1 + 1 | ||
| 14. | s ← TempSol.city[r1] | ||
| 15. | e ←TempSol.city[r2] | ||
| 16. | while (CitiesToOrder ≠ Ø or Null) | ||
| 17. | TempSol.city[r] //Equation (13) | ||
| 18. | s ← TempSol.city[r] | ||
| 19. | CitiesToOrder ← CitiesToOrder − {s} | ||
| 20. | if (r < NoOfCities) | ||
| 21. | r ← r + 1 | ||
| 22. | else | ||
| 23. | r ← 1 | ||
| 24. | end if | ||
| 25. | end while | ||
| 26. | if (TempSol.Cost < .Cost) | ||
| 27. | ← TempSol | ||
| 28. | end if | ||
| 29. | return | ||
4. Experimental Studies
4.1. Experimental Setup
4.2. Experimental Results and Performance Comparison
4.3. Statistical Analysis of Presented Results
4.3.1. Friedman Test
- Observations are mutually independent. That is, the results within one row do not affect the results of other rows.
- For each row, results can be ranked based on their performance.
4.3.2. Post-Hoc Test
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lenstra, J.K.; Kan, A.H.G.R. Some Simple Applications of the Travelling Salesman Problem. J. Oper. Res. Soc. 1975, 26, 717–733. [Google Scholar] [CrossRef]
- Hoffman, K.L.; Padberg, M.; Rinaldi, G. Encyclopedia of Operations Research and Management Science; Springer: Boston, MA, USA, 2013. [Google Scholar]
- Reinelt, G. Tsplib 95. Interdiszip. Zent. Für Wiss. Rechn. (IWR) Heidelb. 1995, 338, 1–16. [Google Scholar]
- Reinelt, G. TSPLIB—A Traveling Salesman Problem Library. ORSA J. Comput. 1991, 3, 376–384. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef] [Green Version]
- Selvi, V.; Umarani, R. Comparative Analysis of Ant Colony and Particle Swarm Optimization Techniques. Int. J. Comput. Appl. 2010, 5, 1–6. [Google Scholar] [CrossRef]
- Li, W.H.; Yang, Y.; Liao, H.Q.; Li, J.L.; Zheng, X.P. Artificial Bee Colony Algorithm for Traveling Salesman Problem. Adv. Mater. Res. 2011, 314–316, 2191–2196. [Google Scholar] [CrossRef]
- Akhand, M.A.H.; Akter, S.; Rashid, M.A.; Yaakob, S.B. Velocity tentative PSO: An optimal velocity implementation based particle swarm optimization to solve traveling salesman problem. IAENG Int. J. Comput. Sci. 2015, 42, 221–232. [Google Scholar]
- Ouaarab, A.; Ahiod, B.; Yang, X.-S. Discrete cuckoo search algorithm for the travelling salesman problem. Neural Comput. Appl. 2013, 24, 1659–1669. [Google Scholar] [CrossRef]
- Tuani, A.F.; Keedwell, E.; Collett, M. Heterogenous Adaptive Ant Colony Optimization with 3-opt local search for the Travelling Salesman Problem. Appl. Soft Comput. 2020, 97, 106720. [Google Scholar] [CrossRef]
- Gülcü, Ş.; Mahi, M.; Baykan, Ö.K.; Kodaz, H. A parallel cooperative hybrid method based on ant colony optimization and 3-Opt algorithm for solving traveling salesman problem. Soft Comput. 2018, 22, 1669–1685. [Google Scholar] [CrossRef]
- Dahan, F.; El Hindi, K.; Mathkour, H.; AlSalman, H. Dynamic Flying Ant Colony Optimization (DFACO) for Solving the Traveling Salesman Problem. Sensors 2019, 19, 1837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ebadinezhad, S. DEACO: Adopting dynamic evaporation strategy to enhance ACO algorithm for the traveling salesman problem. Eng. Appl. Artif. Intell. 2020, 92, 103649. [Google Scholar] [CrossRef]
- Mahi, M.; Baykan, Ö.K.; Kodaz, H. A new hybrid method based on Particle Swarm Optimization, Ant Colony Optimization and 3-Opt algorithms for Traveling Salesman Problem. Appl. Soft Comput. 2015, 30, 484–490. [Google Scholar] [CrossRef]
- Liu, Y.; Cao, B. A Novel Ant Colony Optimization Algorithm with Levy Flight. IEEE Access 2020, 8, 67205–67213. [Google Scholar] [CrossRef]
- Liao, E.; Liu, C. A Hierarchical Algorithm Based on Density Peaks Clustering and Ant Colony Optimization for Traveling Salesman Problem. IEEE Access 2018, 6, 38921–38933. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Wang, L.; Song, W. Ant Colony Optimization for the Traveling Salesman Problem Based on Ants with Memory. In Proceedings of the 2008 Fourth International Conference on Natural Computation, Jinan, China, 18–20 October 2008; Volume 7, pp. 496–501. [Google Scholar] [CrossRef]
- Guntsch, M.; Middendorf, M. A Population Based Approach for ACO. Lect. Notes Comput. Sci. Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform. 2002, 2279, 72–81. [Google Scholar] [CrossRef]
- Dorigo, M.; Gambardella, L.M. A study of some properties of Ant-Q. In Parallel Problem Solving from Nature—PPSN IV. PPSN 1996; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar] [CrossRef] [Green Version]
- Peya, Z.J.; Akhand, M.A.H.; Sultana, T.; Rahman, M.M.H. Distance based Sweep Nearest Algorithm to Solve Capacitated Vehicle Routing Problem. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 259–264. [Google Scholar] [CrossRef]
- Punnen, A.P. The Traveling Salesman Problem: Applications, Formulations and Variations. In The Traveling Salesman Problem and Its Variations; Springer: Boston, MA, USA, 2007; Volume 12, pp. 1–28. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Yang, S. Ant colony optimization with immigrants schemes for the dynamic travelling salesman problem with traffic factors. Appl. Soft Comput. 2013, 13, 4023–4037. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Li, A.; Huo, Q.; Zhang, N.; Qu, N.; Zhu, M.; Chen, L. A Slime Mold-Ant Colony Fusion Algorithm for Solving Traveling Salesman Problem. IEEE Access 2020, 8, 202508–202521. [Google Scholar] [CrossRef]
- Khan, I.; Maiti, M.K.; Maiti, M. Coordinating Particle Swarm Optimization, Ant Colony Optimization and K-Opt Algorithm for Traveling Salesman Problem. Commun. Comput. Inf. Sci. 2017, 655, 103–119. [Google Scholar] [CrossRef]
- Mavrovouniotis, M.; Muller, F.M.; Yang, S. Ant Colony Optimization with Local Search for Dynamic Traveling Salesman Problems. IEEE Trans. Cybern. 2016, 47, 1743–1756. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yazdani, M.; Jolai, F. Lion Optimization Algorithm (LOA): A nature-inspired metaheuristic algorithm. J. Comput. Des. Eng. 2015, 3, 24–36. [Google Scholar] [CrossRef] [Green Version]
- Sharma, H.; Hazrati, G.; Bansal, J.C. Spider Monkey Optimization Algorithm. In Studies in Computational Intelligence; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 779, pp. 43–59. [Google Scholar]
- Ahmad, Y.; Ullah, M.; Khan, R.; Shafi, B.; Khan, A.; Zareei, M.; Aldosary, A.; Mohamed, E.M. SiFSO: Fish Swarm Optimization-Based Technique for Efficient Community Detection in Complex Networks. Complexity 2020, 2020, 6695032. [Google Scholar] [CrossRef]
- Li, L.; Cheng, Y.; Tan, L.; Niu, B. A Discrete Artificial Bee Colony Algorithm for TSP Problem. Int. J. Adv. Comput. Technol. 2012, 4, 566–573. [Google Scholar]
- Khan, I.; Maiti, M.K. A swap sequence based Artificial Bee Colony algorithm for Traveling Salesman Problem. Swarm Evol. Comput. 2019, 44, 428–438. [Google Scholar] [CrossRef]
- Daoqing, Z.; Mingyan, J. Parallel discrete lion swarm optimization algorithm for solving traveling salesman problem. J. Syst. Eng. Electron. 2020, 31, 751–760. [Google Scholar] [CrossRef]
- Akhand, M.; Ayon, S.I.; Shahriyar, S.; Siddique, N.; Adeli, H. Discrete Spider Monkey Optimization for Travelling Salesman Problem. Appl. Soft Comput. 2019, 86, 105887. [Google Scholar] [CrossRef]
- Ezugwu, A.E.-S.; Adewumi, A.O. Discrete symbiotic organisms search algorithm for travelling salesman problem. Expert Syst. Appl. 2017, 87, 70–78. [Google Scholar] [CrossRef]
- Alipour, M.M.; Razavi, S.N.; Derakhshi, M.R.F.; Balafar, M.A. A hybrid algorithm using a genetic algorithm and multiagent reinforcement learning heuristic to solve the traveling salesman problem. Neural Comput. Appl. 2017, 30, 2935–2951. [Google Scholar] [CrossRef]
- Bouzidi, A.; Riffi, M.E. Discrete Cat Swarm Optimization to Resolve the Traveling Salesman Problem. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2013, 3, 13–18. [Google Scholar]
- Panwar, K.; Deep, K. Discrete Grey Wolf Optimizer for symmetric travelling salesman problem. Appl. Soft Comput. 2021, 105, 107298. [Google Scholar] [CrossRef]
- Pandiri, V.; Singh, A. An artificial bee colony algorithm with variable degree of perturbation for the generalized covering traveling salesman problem. Appl. Soft Comput. 2019, 78, 481–495. [Google Scholar] [CrossRef]
- Zhang, J.; Hong, L.; Liu, Q. An Improved Whale Optimization Algorithm for the Traveling Salesman Problem. Symmetry 2020, 13, 48. [Google Scholar] [CrossRef]
- Colorni, A.; Dorigo, M.; Maniezzo, V. Distributed Optimization by ant colonies. Proc. First Eur. Conf. Artif. Life 1991, 142, 134–142. [Google Scholar]
- Helsgaun, K. General k-opt submoves for the Lin–Kernighan TSP heuristic. Math. Program. Comput. 2009, 1, 119–163. [Google Scholar] [CrossRef]
- Pereira, D.G.; Afonso, A.; Medeiros, F.M. Overview of Friedman’s Test and Post-hoc Analysis. Commun. Stat. Simul. Comput. 2014, 44, 2636–2653. [Google Scholar] [CrossRef]
- Riffenburgh, R.H. Tests on Ranked Data. In Statistics in Medicine; Elsevier: Amsterdam, The Netherlands, 2012; pp. 221–248. [Google Scholar]
- Derrac, J.; García, S.; Molina, D.; Herrera, F. A practical tutorial on the use of nonparametric statistical tests as a methodology for comparing evolutionary and swarm intelligence algorithms. Swarm Evol. Comput. 2011, 1, 3–18. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sl. | TSP Instance | Optimal Tour Length | Best Tour Length (TL) and Error Rate (ER) Comparison | Average Tour Length (TL) and Standard Deviation (SD) Comparison | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ACO | ACOAV (FSU) | ACOAV (PSU) | ACOAV | ACO | ACOAV (FSU) | ACOAV (PSU) | ACOAV | |||||||||||
| Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | |||
| 1 | eil51 | 426 | 435 | 2.11 | 436 | 2.35 | 426 | 0 | 426 | 0 | 441.3 | 3.86 | 436.3 | 0.9 | 426 | 0 | 426 | 0 |
| 2 | berlin52 | 7542 | 7689 | 1.95 | 7677 | 1.79 | 7569 | 0.36 | 7542 | 0 | 7795.8 | 81.61 | 7677 | 0 | 7659.25 | 20.7 | 7542 | 0 |
| 3 | st70 | 675 | 696 | 3.11 | 710 | 5.19 | 683 | 1.19 | 675 | 0 | 712.75 | 6.11 | 716 | 3.46 | 683.9 | 0.3 | 675 | 0 |
| 4 | eil76 | 538 | 548 | 1.86 | 543 | 0.93 | 541 | 0.56 | 538 | 0 | 559 | 4.25 | 556.85 | 2.48 | 542.05 | 1.36 | 538 | 0 |
| 5 | pr76 | 108,159 | 119,176 | 10.19 | 115,930 | 7.18 | 110,465 | 2.13 | 108,159 | 0 | 126,121 | 2784.97 | 115,930 | 0 | 110,928 | 201.09 | 108,159 | 0 |
| 6 | rat99 | 1211 | 1264 | 4.38 | 1274 | 5.2 | 1244 | 2.73 | 1211 | 0 | 1297.4 | 16.9 | 1285.1 | 9.41 | 1244.5 | 0.97 | 1211 | 0 |
| 7 | kroA100 | 21,282 | 24,210 | 13.76 | 22,788 | 7.08 | 21,521 | 1.12 | 21,282 | 0 | 24,904.4 | 334.39 | 22,788 | 0 | 21,585.6 | 14.82 | 21,282 | 0 |
| 8 | kroB100 | 22,141 | 25,191 | 13.78 | 23,852 | 7.73 | 22,416 | 1.24 | 22,141 | 0 | 25,847.7 | 298.76 | 23,852 | 0 | 22,488.5 | 38.92 | 22,141 | 0 |
| 9 | rd100 | 7910 | 8547 | 8.05 | 8556 | 8.17 | 7943 | 0.42 | 7910 | 0 | 8880.95 | 148.21 | 8556 | 0 | 7974.65 | 22.54 | 7910 | 0 |
| 10 | eil101 | 629 | 682 | 8.43 | 652 | 3.66 | 636 | 1.11 | 629 | 0 | 692.95 | 7.05 | 653.65 | 1.31 | 637.2 | 0.51 | 629 | 0 |
| 11 | lin105 | 14,379 | 15,714 | 9.28 | 14,803 | 2.95 | 14,549 | 1.18 | 14,379 | 0 | 16310 | 197.1 | 14,803 | 0 | 14,601.6 | 16.56 | 14,379 | 0 |
| 12 | pr107 | 44,303 | 48,512 | 9.5 | 50,356 | 13.66 | 44,566 | 0.59 | 44,303 | 0 | 49,129.8 | 359.13 | 50,356 | 0 | 44,897.9 | 137.2 | 44,303 | 0 |
| 13 | pr124 | 59,030 | 66,702 | 13 | 62,977 | 6.69 | 59,990 | 1.63 | 59,030 | 0 | 68,970.2 | 910.83 | 62,977 | 0 | 60,049.8 | 22.11 | 59,030 | 0 |
| 14 | ch130 | 6110 | 6859 | 12.26 | 6581 | 7.71 | 6204 | 1.54 | 6110 | 0 | 7012.3 | 77.03 | 6581 | 0 | 6234.8 | 13.83 | 6110 | 0 |
| 15 | ch150 | 6528 | 7236 | 10.85 | 6941 | 6.33 | 6621 | 1.42 | 6528 | 0 | 7421.5 | 100.03 | 6962.45 | 29.34 | 6630.2 | 5.47 | 6528 | 0 |
| 16 | kroA150 | 26,524 | 31,857 | 20.11 | 29,330 | 10.58 | 27,092 | 2.14 | 26,524 | 0 | 33,233.9 | 503.85 | 29,330 | 0 | 27,168.5 | 37.65 | 26,524 | 0 |
| 17 | kroB150 | 26,130 | 31,262 | 19.64 | 28,386 | 8.63 | 26,537 | 1.56 | 26,130 | 0 | 33011.1 | 504.53 | 28,386 | 0 | 26,736.5 | 79.45 | 26,130 | 0 |
| 18 | rat195 | 2323 | 2524 | 8.65 | 2428 | 4.52 | 2362 | 1.68 | 2326 | 0.13 | 2582.2 | 32.64 | 2430.9 | 4.09 | 2371.4 | 4.19 | 2330.2 | 1.6 |
| 19 | d198 | 15,780 | 18,503 | 17.26 | 16,961 | 7.48 | 15,997 | 1.38 | 15,780 | 0 | 19,023.9 | 202.59 | 17,136.5 | 88.53 | 16,111.5 | 47.25 | 15,780 | 0 |
| 20 | kroA200 | 29,368 | 36,628 | 24.72 | 31,866 | 8.51 | 29,725 | 1.22 | 29,368 | 0 | 38,404.1 | 639.51 | 31,886.7 | 49.28 | 29,830.5 | 56.59 | 29,368 | 0 |
| 21 | kroB200 | 29,437 | 37,305 | 26.73 | 32,304 | 9.74 | 29,857 | 1.43 | 29,438 | 0.003 | 38,516.3 | 605.58 | 32,304 | 0 | 30,155.8 | 112.8 | 29,439.5 | 0.67 |
| 22 | tsp225 | 3861 | 4592 | 18.93 | 4208 | 8.99 | 3997 | 3.52 | 3923 | 1.61 | 4733.4 | 61.17 | 4208 | 0 | 4047.15 | 15.41 | 3956.9 | 11.62 |
| 23 | pr226 | 80,369 | 96,539 | 20.12 | 86,109 | 7.14 | 80,993 | 0.78 | 80,369 | 0 | 102,238 | 1712.21 | 86,127.4 | 9.2 | 81,289.2 | 71.16 | 80,369.6 | 1.43 |
| 24 | a280 | 2579 | 3089 | 19.78 | 2778 | 7.72 | 2656 | 2.99 | 2581 | 0.08 | 3241.75 | 46.44 | 2816.8 | 17.1 | 2666.8 | 8.53 | 2589.4 | 3.83 |
| 25 | pr299 | 48,191 | 63,759 | 32.3 | 54,470 | 13.03 | 50,159 | 4.08 | 48,215 | 0.05 | 67,450.6 | 1132.05 | 54,470.3 | 0.48 | 50,458.7 | 146.52 | 48,519.3 | 70.16 |
| 26 | lin318 | 42,029 | 57,586 | 37.01 | 44,892 | 6.81 | 43,079 | 2.5 | 42,203 | 0.41 | 58,481.8 | 514.22 | 44,892 | 0 | 43243.2 | 76.5 | 42,220.9 | 9.99 |
| 27 | rd400 | 15,281 | 20,664 | 35.23 | 16,899 | 10.59 | 15,973 | 4.53 | 15,467 | 1.22 | 21,210.2 | 199.2 | 16,899 | 0 | 16,055.5 | 42.85 | 15,576 | 44.23 |
| 28 | fl417 | 11,861 | 14,370 | 21.15 | 12,948 | 9.16 | 11,921 | 0.51 | 11,861 | 0 | 14,725.4 | 149.15 | 12,948 | 0 | 11,937 | 8.23 | 11,861.2 | 0.4 |
| 29 | pr439 | 107,217 | 135,080 | 25.99 | 121,360 | 13.19 | 111,024 | 3.55 | 107,613 | 0.37 | 139,745 | 1847.98 | 121,360 | 0 | 111,490 | 251.24 | 107,965 | 182.42 |
| 30 | pcb442 | 50,778 | 72,682 | 43.14 | 56,991 | 12.24 | 53,833 | 6.02 | 50,778 | 0 | 75,440.8 | 1069.75 | 56,991.8 | 3.49 | 54,150.7 | 171.18 | 50,945.2 | 54.98 |
| 31 | rat575 | 6773 | 9012 | 33.06 | 7344 | 8.43 | 7118 | 5.09 | 6935 | 2.39 | 9213.35 | 85.31 | 7345.85 | 3.6 | 7141.95 | 11.87 | 6972.25 | 15.73 |
| 32 | rat783 | 8806 | 12,286 | 39.52 | 9712 | 10.29 | 9407 | 6.82 | 9050 | 2.77 | 12,554.5 | 119.38 | 9712.8 | 0.98 | 9451.45 | 21.13 | 9101.1 | 20.77 |
| 33 | pr1002 | 259,045 | 371,087 | 43.25 | 300,757 | 16.1 | 284,985 | 10.01 | 266,155 | 2.74 | 374,401 | 2224.55 | 300,972 | 214.5 | 288,991 | 1397.71 | 268,111 | 678.67 |
| 34 | fl1400 | 20,127 | 29,486 | 46.5 | 22,673 | 12.65 | 21,157 | 5.12 | 20,215 | 0.44 | 30,313.1 | 395.21 | 22,799.7 | 128.91 | 21,271.4 | 92.34 | 20,226.7 | 5.39 |
| 35 | pr2392 | 378,032 | 581,878 | 53.92 | 439,849 | 16.35 | 428,523 | 13.36 | 392,461 | 3.82 | 588,396 | 3977.43 | 440,033 | 140.07 | 431,504 | 1610.47 | 397,871 | 1805.49 |
| Optimal/Best Count | 0/0 | 0/0 | 1/1 | 22/35 | 0/0 | 0/0 | 1/1 | 19/35 | ||||||||||
| Win-Draw-Loss over ACO | - | 30-0-5 | 35-0-0 | 35-0-0 | - | 33-0-2 | 35-0-0 | 35-0-0 | ||||||||||
| Win-Draw-Loss over ACOAV (FSU) | 5-0-30 | - | 35-0-0 | 35-0-0 | 2-0-33 | - | 35-0-0 | 35-0-0 | ||||||||||
| Win-Draw-Loss over ACOAV (PSU) | 0-0-35 | 0-0-35 | - | 34-1-0 | 0-0-35 | 0-0-35 | - | 34-1-0 | ||||||||||
| Sl. | TSP Instance | Optimal Tour Length | GA-MARL + NICH-LS [35] | DSOS [34] | SSABC [31] | DSMO [33] | DLSO [32] | PSO-ACO [14] | PACO [11] | DEACO [13] | HAACO [10] | Proposed ACOAV | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | Best TL | ER (%) | |||
| 1 | eil51 | 426 | 426 | 0 | 427 | 0.23 | 427 | 0.23 | 428.86 | 0.67 | 428.87 | 0.67 | 426 | 0 | 426 | 0 | 426 | 0 | 426 | 0 | 426 | 0 |
| 2 | berlin52 | 7542 | 7542 | 0 | 7542 | 0 | 7542 | 0 | 7544.37 | 0.03 | 7544.37 | 0.03 | 7542 | 0 | 7542 | 0 | 7542 | 0 | 7542 | 0 | 7542 | 0 |
| 3 | st70 | 675 | 675 | 0 | 675 | 0 | 675 | 0 | 677.11 | 0.31 | 677.11 | 0.31 | 676 | 0.15 | 676 | 0.15 | 675 | 0 | 675 | 0 | 675 | 0 |
| 4 | eil76 | 538 | 538 | 0 | 542 | 0.74 | 538 | 0 | 558.68 | 3.84 | – | – | 538 | 0 | 538 | 0 | 541.6 | 0.67 | 538 | 0 | 538 | 0 |
| 5 | pr76 | 108,159 | 108,159 | 0 | 108,159 | 0 | 108,159.4 | 0.0004 | 108,159.43 | 0.01 | – | – | – | – | – | – | – | – | 108,159 | 0 | ||
| 6 | rat99 | 1211 | 1211 | 0 | 1224 | 1.07 | 1211 | 0 | 1225.56 | 1.2 | – | – | 1224 | 1.07 | 1213 | 0.17 | 1211 | 0 | 1211 | 0 | 1211 | 0 |
| 7 | kroA100 | 21,282 | 21,282 | 0 | 21,282 | 0 | 21,282 | 0 | 21,298.21 | 0.08 | 21,285.44 | 0.02 | 21,301 | 0.09 | 21,282 | 0 | 21,282 | 0 | 21,282 | 0 | 21,282 | 0 |
| 8 | kroB100 | 22,141 | 22,141 | 0 | 22,141 | 0 | – | – | 22,308 | 0.75 | 22,142.07 | 0.01 | – | – | – | – | 22,141 | 0 | – | – | 22,141 | 0 |
| 9 | rd100 | 7910 | – | – | – | – | – | – | 8041.3 | 1.66 | – | – | – | – | – | – | 7910 | 0 | – | – | 7910 | 0 |
| 10 | eil101 | 629 | 629 | 0 | 640 | 1.75 | 629 | 0 | 648.66 | 3.13 | 642.53 | 2.15 | 631 | 0.32 | 629 | 0 | 629 | 0 | 630 | 0.16 | 629 | 0 |
| 11 | lin105 | 14,379 | 14,379 | 0 | 14,381 | 0.01 | 14,379 | 0 | 14383 | 0.03 | 14,383.0 | 0.03 | 14,379 | 0 | 14,379 | 0 | 14,379 | 0 | 14,379 | 0 | 14,379 | 0 |
| 12 | pr107 | 44,303 | 44,303 | 0 | 44,314 | 0.02 | – | – | 44,385.86 | 0.19 | – | – | – | – | – | – | – | – | – | – | 44,303 | 0 |
| 13 | pr124 | 59,030 | 59,030 | 0 | 59,030 | 0 | – | – | 60,285.21 | 2.13 | – | – | – | – | – | – | 59,074 | 0.07 | – | – | 59,030 | 0 |
| 14 | ch130 | 6110 | 6132 | 0.36 | – | – | – | – | – | – | 6158.08 | 0.79 | – | – | – | – | 6110 | 0 | – | – | 6110 | 0 |
| 15 | ch150 | 6528 | 6528 | 0 | 6542 | 0.21 | – | – | – | – | 6530.90 | 0.04 | 6538 | 0.15 | 6570 | 0.64 | 6528 | 0 | 6566 | 0.58 | 6528 | 0 |
| 16 | kroA150 | 26,524 | 26,579 | 0.21 | – | – | – | – | 27,591.44 | 4.02 | – | – | – | – | – | – | 26,572 | 0.18 | – | – | 26,524 | 0 |
| 17 | kroB150 | 26,130 | 26,130 | 0 | – | – | – | – | 26,601.94 | 1.81 | – | – | – | – | – | – | 26,130 | 0 | – | – | 26,130 | 0 |
| 18 | rat195 | 2323 | – | – | – | – | – | – | 2372.89 | 2.15 | – | – | – | – | – | – | 2340 | 0.73 | – | – | 2326 | 0.13 |
| 19 | d198 | 15,780 | – | – | – | – | – | – | 15,978.13 | 1.26 | 15,808.93 | 0.18 | – | – | – | – | – | – | – | – | 15,780 | 0 |
| 20 | kroA200 | 29,368 | 29,435 | 0.23 | 29,477 | 0.37 | 29450 | 0.28 | 30,481.35 | 3.79 | 29,519.83 | 0.52 | 29,468 | 0.34 | 29,533 | 0.56 | 29,368 | 0 | 29,483 | 0.39 | 29,368 | 0 |
| 21 | kroB200 | 29,437 | – | – | – | – | – | 30,716.5 | 4.35 | 29,652.94 | 0.73 | – | – | – | – | – | – | – | – | 29,438 | 0.003 | |
| 22 | tsp225 | 3861 | 3865 | 0.1 | 3877 | 0.41 | – | – | 4013.68 | 3.95 | 3929.51 | 1.77 | – | – | – | – | – | – | – | – | 3923 | 1.61 |
| 23 | pr226 | 80,369 | 80,369 | 0 | 80,407 | 0.05 | – | – | 83,587.98 | 4.01 | – | – | – | – | – | – | – | – | – | – | 80,369 | 0 |
| 24 | a280 | 2579 | 2595 | 0.62 | – | – | – | – | – | 2609.54 | 1.18 | – | – | – | – | – | – | – | – | 2581 | 0.08 | |
| 25 | pr299 | 48,191 | 48,637 | 0.93 | 49162 | 2.01 | – | – | 50,579.82 | 4.96 | – | – | – | – | – | – | 48,455 | 0.55 | – | – | 48,215 | 0.05 |
| 26 | lin318 | 42,029 | 42,255 | 0.54 | 42,201 | 0.4 | – | – | 44,118.66 | 4.97 | 42,744.96 | 1.7 | – | – | – | – | – | – | – | – | 42,203 | 0.41 |
| 27 | rd400 | 15,281 | – | – | – | – | – | – | – | – | – | – | – | – | 15,578 | 1.94 | 15,323 | 0.27 | 15,603 | 2.11 | 15,467 | 1.22 |
| 28 | fl417 | 11,861 | – | – | – | – | – | – | 12,218.98 | 3.02 | – | – | – | – | 11,972 | 0.94 | 11,866 | 0.04 | 11,960 | 0.83 | 11,861 | 0 |
| 29 | pr439 | 107,217 | 107,833 | 0.57 | – | – | – | – | 112,105.2 | 4.56 | – | – | – | – | 108,482 | 1.18 | – | – | 108,730 | 1.41 | 107,613 | 0.37 |
| 30 | pcb442 | 50,778 | – | – | 51,418 | 1.26 | – | – | – | – | 52,330.24 | 3.06 | – | – | 51,962 | 2.33 | 50,964.5 | 0.37 | 51,780 | 1.97 | 50,778 | 0 |
| 31 | rat575 | 6773 | – | – | 7073 | 4.43 | – | – | – | – | – | – | – | – | 7003 | 3.4 | 6773 | 0 | – | – | 6935 | 2.39 |
| 32 | rat783 | 8806 | – | – | 9045 | 2.71 | – | – | – | – | – | – | – | – | 9111 | 3.46 | 8916.0 | 1.25 | – | – | 9050 | 2.77 |
| 33 | pr1002 | 259,045 | 266,886 | 3.03 | 272,381 | 5.15 | – | – | – | – | 273,696.03 | 5.66 | – | – | – | – | – | – | – | – | 266,155 | 2.74 |
| 34 | fl1400 | 20,127 | 20,304 | 0.88 | – | – | – | – | – | – | – | – | – | – | – | – | – | – | – | – | 20,215 | 0.44 |
| 35 | pr2392 | 378,032 | 397,314 | 5.1 | 419,246 | 10.9 | – | – | – | – | – | – | – | – | – | – | – | – | – | – | 392,461 | 3.82 |
| Optimal/Best Count | 15/16 | 6/7 | 7/7 | 0/0 | 0/0 | 4/4 | 6/6 | 14/16 | 7/7 | 22/30 | ||||||||||||
| Sl. | TSP Instance | Optimal Tour Length | GA-MARL + NICH-LS [35] | DSOS [34] | SSABC [31] | DSMO [33] | DLSO [32] | PSO-ACO [14] | PACO [11] | DEACO [13] | HAACO [10] | Proposed ACOAV | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | Avg. TL | SD | |||
| 1 | eil51 | 426 | 427.4 | – | 427.90 | 1.20 | 427.01 | 0.46 | 436.96 | 4.73 | 429.7 | 1.61 | 426.45 | 0.61 | 426.35 | 0.49 | 426 | 0 | 427.5 | – | 426 | 0 |
| 2 | berlin52 | 7542 | 7550.7 | – | 7542.60 | 0 | 7542 | 0 | 7633.6 | 85.4 | 7544.37 | 0 | 7543.2 | 2.37 | 7542 | 0 | 7542 | 0 | 7542 | – | 7542 | 0 |
| 3 | st70 | 675 | 679.43 | – | 679.2 | 2.8 | 675.77 | 1.17 | 702.64 | 15.04 | 678.78 | 3.38 | 678.2 | 1.47 | 677.85 | 0.99 | 675 | 0 | 676.5 | – | 675 | 0 |
| 4 | eil76 | 538 | 545.3 | – | 542,547.4 | 3.9 | 538.15 | 0.60 | 572.7 | 7.56 | – | – | 538.3 | 0.47 | 539.85 | 1.09 | 541.6 | 0.6 | 542 | – | 538 | 0 |
| 5 | pr76 | 108,159 | 109,556.57 | – | – | – | 111,299.3 | 2050.48 | 108,572.35 | 341.96 | – | – | – | – | – | – | – | – | 108,159 | 0 | ||
| 6 | rat99 | 1211 | 1223.3 | – | 1228.37 | 14.32 | 1211.50 | 0.67 | 1291.93 | 21.07 | – | – | 1227.4 | 1.98 | 1217.1 | 4.01 | 1211.7 | – | 1214.1 | – | 1211 | 0 |
| 7 | kroA100 | 21,282 | 21,354.4 | – | 21,409.50 | 149.15 | 21,287.19 | 8.10 | 22,024.27 | 508.89 | 21,370.09 | 44.66 | 21,445.1 | 78.24 | 21,326.8 | 33.72 | 21,282 | 0 | 21,364.2 | – | 21,282 | 0 |
| 8 | kroB100 | 22,141 | 22,283.4 | – | 22,339.20 | 230.18 | – | – | 23,022.37 | 277.32 | 22,270.58 | 95.52 | – | – | – | – | 22,141 | 0 | – | – | 22,141 | 0 |
| 9 | rd100 | 7910 | – | – | – | – | 8377.76 | 209.4 | – | – | – | – | – | – | 7910 | 0 | 7910 | 0 | ||||
| 10 | eil101 | 629 | 642.6 | – | 650.60 | 4.57 | 630.59 | 2.37 | 674.4 | 10.97 | 649.05 | – | 632.7 | 2.12 | 630.55 | 2.63 | 629 | 0 | 632.5 | – | 629 | 0 |
| 11 | lin105 | 14,379 | 14,385.63 | – | 14,431.73 | 14,379.10 | 1.30 | 15,114 | 500.76 | 14,433.33 | 34.23 | 14,379.15 | 0.48 | 14,393 | 19.76 | 14,379 | 0 | 14,411.8 | – | 14,379 | 0 | |
| 12 | pr107 | 44,303 | 44,424.73 | – | 44,445.10 | 181.35 | – | – | 45,666.99 | 1300.43 | – | – | – | – | – | – | – | – | – | 44,303 | 0 | |
| 13 | pr124 | 59,030 | 59,208.83 | – | 59,030 | 264.08 | – | – | 62,443.49 | 1644.93 | – | – | – | – | – | – | – | – | – | 59,030 | 0 | |
| 14 | ch130 | 6110 | 6204.17 | – | – | – | – | – | – | – | 6201.98 | 30.96 | – | – | – | – | 6110 | 0 | – | – | 6110 | 0 |
| 15 | ch150 | 6528 | 6547.67 | – | 6552.58 | – | – | – | – | 6597.83 | 38.83 | 6563.95 | 27.58 | 6601.4 | 15.01 | 6528 | 0 | 6578.8 | – | 6528 | 0 | |
| 16 | kroA150 | 26,524 | 26,891.83 | – | – | – | – | 28,354.09 | 524.91 | – | – | – | – | – | – | 26,524 | 0 | – | – | 26,524 | 0 | |
| 17 | kroB150 | 26,130 | 26,477.33 | – | – | – | – | 27,576.16 | 625.26 | – | – | – | – | – | – | 26,130 | 0 | – | – | 26,130 | 0 | |
| 18 | rat195 | 2323 | – | – | – | – | – | 2488.55 | 50.48 | – | – | – | – | – | – | – | – | – | – | 2330.2 | 1.6 | |
| 19 | d198 | 15,780 | – | – | – | – | – | 16,270.47 | 171.2 | 15,896.48 | 35.21 | – | – | – | – | – | – | – | – | 15,780 | 0 | |
| 20 | kroA200 | 29,368 | 29,621 | – | 29,651.23 | 29,469 | 20.03 | 31,828.64 | 652.32 | 29,766.27 | 118.37 | 29,646.05 | 114.71 | 29,644.5 | 53.43 | 29,368 | 0 | 29,633.2 | – | 29,368 | 0 | |
| 21 | kroB200 | 29,437 | – | – | – | – | – | – | 31,781.62 | 487.39 | 29,994.08 | 226.62 | – | – | – | – | 29,440 | 5.1 | – | – | 29,439.5 | 0.67 |
| 22 | tsp225 | 3861 | 3925.33 | – | – | – | – | – | 4162.79 | 66.08 | 3977.53 | 21.05 | – | – | – | – | – | – | – | – | 3956.9 | 11.62 |
| 23 | pr226 | 80,369 | 80,638.6 | – | – | – | – | – | 85,935.69 | 2105.13 | – | – | – | – | – | – | – | – | – | – | 80,369.6 | 1.43 |
| 24 | a280 | 2579 | 2655.47 | – | – | – | – | – | – | – | 2650.49 | 33.83 | – | – | – | – | – | – | – | – | 2589.4 | 3.83 |
| 25 | pr299 | 48,191 | 49,200.57 | – | 50,335.20 | 905.42 | – | – | 51,747.99 | 863.32 | – | – | – | – | – | – | – | – | – | – | 48,519.3 | 70.16 |
| 26 | lin318 | 42,029 | 42,996.63 | – | 42,972.42 | 2037.43 | – | – | 45,460.25 | 660.47 | 43,172.51 | 235.18 | – | – | – | – | 42,225 | 47 | – | – | 42,220.9 | 9.99 |
| 27 | rd400 | 15,281 | – | – | – | – | – | – | – | – | – | – | – | – | 15,613.9 | – | 15,385 | – | 15,644.2 | – | 15,576 | 44.23 |
| 28 | fl417 | 11,861 | – | – | – | – | – | – | 12,950.77 | 360.99 | – | – | – | – | 11,987.4 | – | 11,875 | – | 11,979.5 | – | 11,861.2 | 0.4 |
| 29 | pr439 | 107,217 | 109,577.87 | – | – | – | – | – | 116,379.2 | 2462.82 | – | – | – | – | 108,702 | – | – | – | 108,950.6 | – | 107,965 | 182.42 |
| 30 | pcb442 | 50,778 | – | – | – | – | – | – | – | – | 52,841.26 | 230.75 | – | – | 52,202.4 | – | 50,965 | – | 52,179.8 | – | 50,945.2 | 54.98 |
| 31 | rat575 | 6773 | – | – | 7117.32 | 171.65 | – | – | – | – | – | – | – | – | 7012.4 | – | 6804.0 | 10.3 | – | – | 6972.25 | 15.73 |
| 32 | rat783 | 8806 | – | – | 9102.67 | 37.28 | – | – | – | – | – | – | – | – | 9127.3 | – | 8935.9 | 12.44 | – | – | 9101.1 | 20.77 |
| 33 | pr1002 | 259,045 | 269,845.97 | – | 278,381.51 | 4328.62 | – | – | – | – | 275,825 | 1189.80 | – | – | – | – | – | – | – | – | 268,111 | 678.67 |
| 34 | fl1400 | 20,127 | 20,444.33 | – | – | – | – | – | – | – | – | – | – | – | – | – | 20,229 | 31.15 | – | – | 20,226.7 | 5.39 |
| 35 | pr2392 | 378,032 | 400,171.73 | – | 425,431.78 | 4352.75 | – | – | – | – | – | – | – | – | – | – | – | – | – | – | 397,871 | 1805.49 |
| Optimal/Best Count | 0/1 | 1/1 | 1/1 | 0/0 | 0/0 | 0/0 | 1/1 | 13/16 | 1/1 | 19/31 | ||||||||||||
| n | Method | GA-MARL + NICH-LS [35] | DSOS [34] | SSABC [31] | DSMO [33] | DLSO [32] | PSO-ACO [14] | PACO [11] | DEACO [13] | HAACO [10] | Proposed ACOAV |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Rank(R) | |||||||||||
| 1 | eil51 | 6 | 8 | 5 | 10 | 9 | 4 | 3 | 1.5 | 7 | 1.5 |
| 2 | berlin52 | 9 | 6 | 3 | 10 | 8 | 7 | 3 | 3 | 3 | 3 |
| 3 | st70 | 9 | 8 | 3 | 10 | 7 | 6 | 5 | 1.5 | 4 | 1.5 |
| 4 | kroA100 | 5 | 8 | 3 | 10 | 7 | 9 | 4 | 1.5 | 6 | 1.5 |
| 5 | eil101 | 7 | 9 | 4 | 10 | 8 | 6 | 3 | 1.5 | 5 | 1.5 |
| 6 | lin105 | 5 | 8 | 3 | 10 | 9 | 4 | 6 | 1.5 | 7 | 1.5 |
| 7 | kroA200 | 4 | 8 | 3 | 10 | 9 | 7 | 6 | 1.5 | 5 | 1.5 |
| for i = 1,2,3…, n | 45 | 55 | 24 | 70 | 57 | 43 | 30 | 12 | 37 | 12 | |
| Average rank | 6.43 | 7.86 | 3.43 | 10 | 8.14 | 6.14 | 4.29 | 1.71 | 5.29 | 1.71 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahadat, A.S.B.; Akhand, M.A.H.; Kamal, M.A.S. Visibility Adaptation in Ant Colony Optimization for Solving Traveling Salesman Problem. Mathematics 2022, 10, 2448. https://doi.org/10.3390/math10142448
Shahadat ASB, Akhand MAH, Kamal MAS. Visibility Adaptation in Ant Colony Optimization for Solving Traveling Salesman Problem. Mathematics. 2022; 10(14):2448. https://doi.org/10.3390/math10142448
Chicago/Turabian StyleShahadat, Abu Saleh Bin, M. A. H. Akhand, and Md Abdus Samad Kamal. 2022. "Visibility Adaptation in Ant Colony Optimization for Solving Traveling Salesman Problem" Mathematics 10, no. 14: 2448. https://doi.org/10.3390/math10142448
APA StyleShahadat, A. S. B., Akhand, M. A. H., & Kamal, M. A. S. (2022). Visibility Adaptation in Ant Colony Optimization for Solving Traveling Salesman Problem. Mathematics, 10(14), 2448. https://doi.org/10.3390/math10142448