
Finite-Time Guaranteed Cost Control for Markovian Jump Systems with Time-Varying Delays


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Statement and Preliminaries
- (I)
- closed-loop system (4) is finite-time stable;
- (II)
- ,
3. Main Results
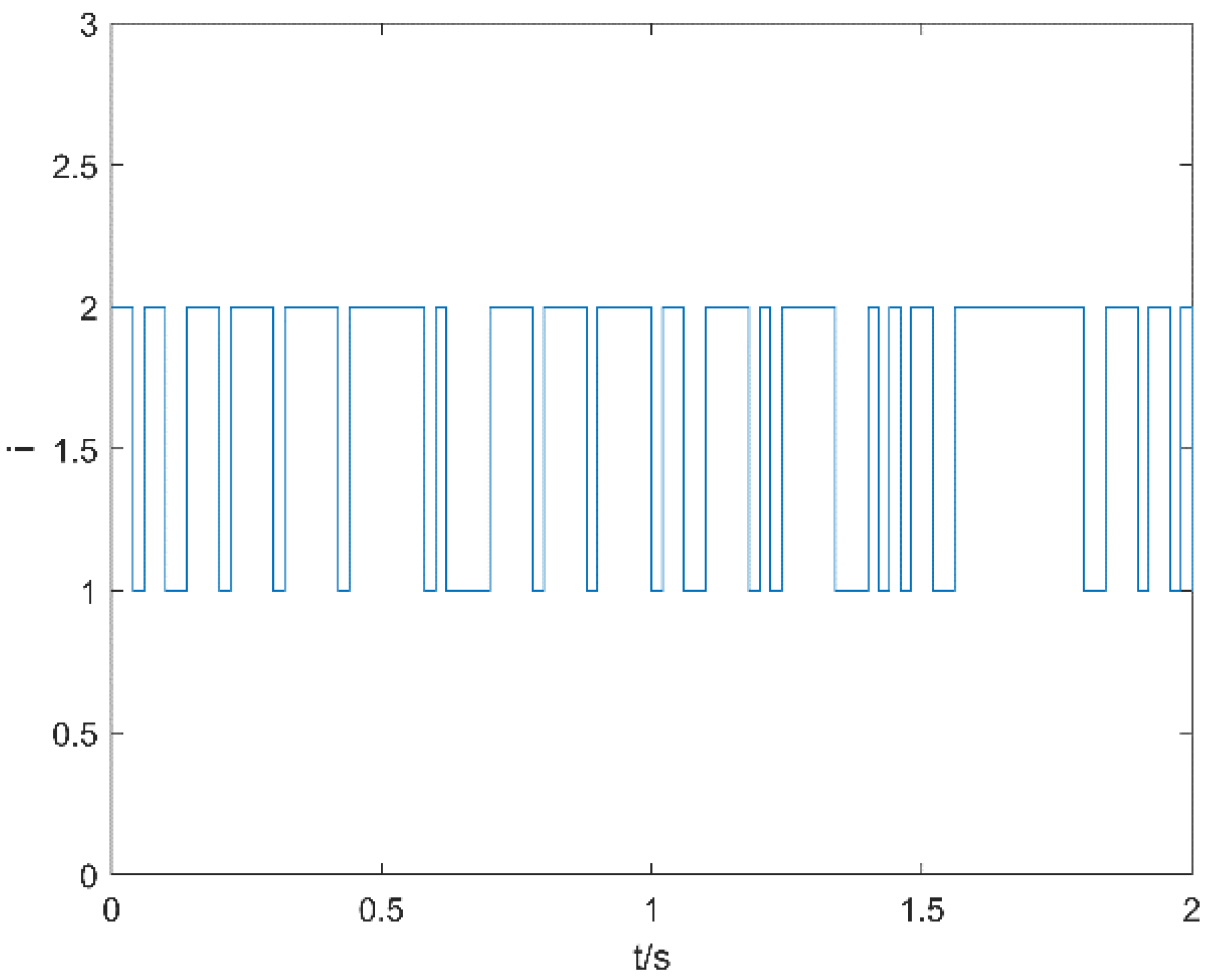
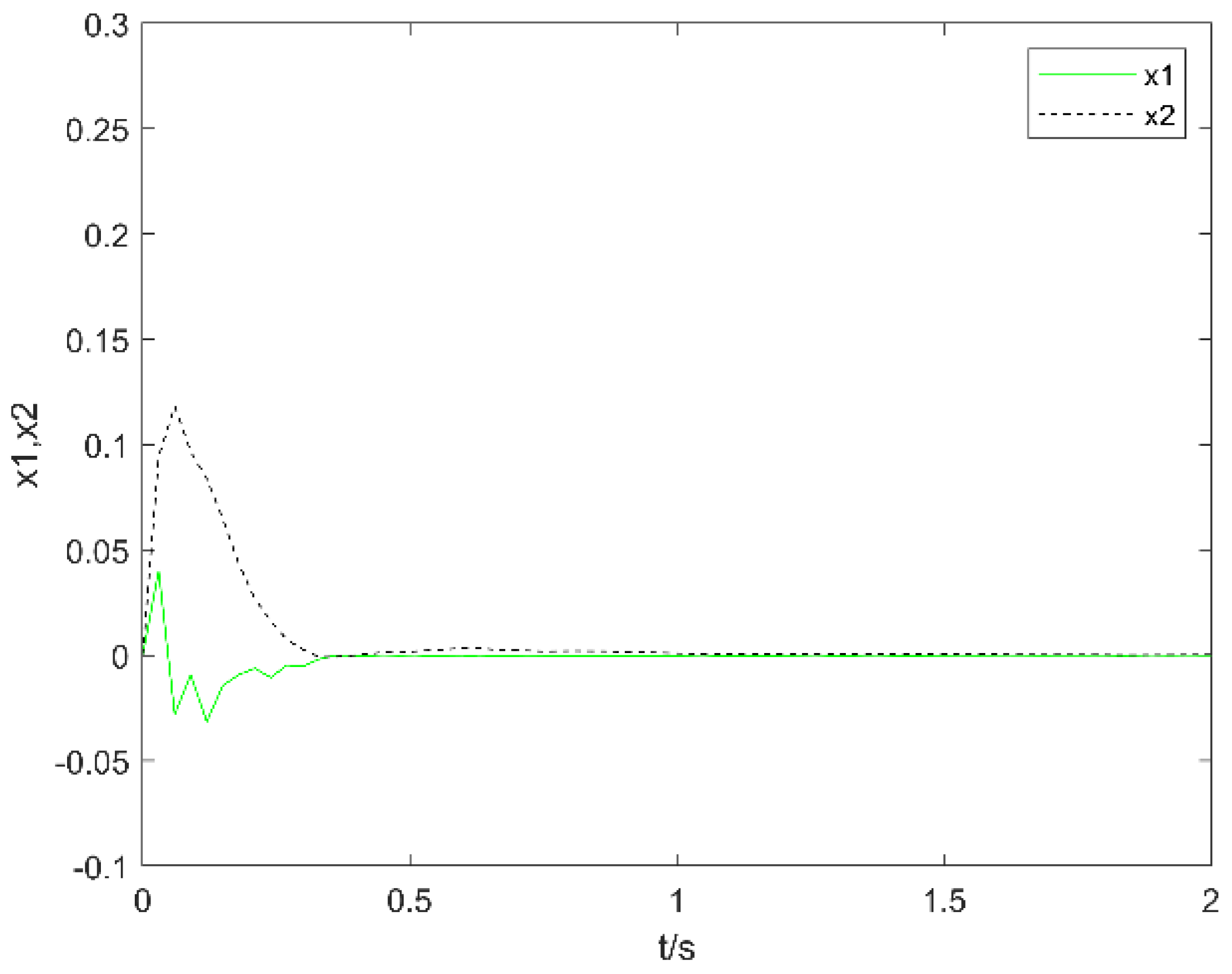
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aberkane, S.; Dragan, V. H∞ filtering of periodic Markovian jump systems: Application to filtering with communication constraints. Automatica 2012, 48, 3151–3156. [Google Scholar] [CrossRef]
- Kazemy, A.; Hajatipour, M. Event-triggered load frequency control of Markovian jump interconnected power systems under denial-of-service attacks. Int. J. Electr. Power Energy Syst. 2021, 133, 107250. [Google Scholar] [CrossRef]
- Huo, S.; Zhang, Y. H∞ consensus of Markovian jump multi-agent systems under multi-channel transmission via output feedback control strategy. ISA Trans. 2020, 99, 28–36. [Google Scholar] [CrossRef] [PubMed]
- Jiang, P.; Zhu, J.; Xi, H. Stability and stabilization for non-homogeneous positive Markovian jump linear systems. Control Theory Appl. 2020, 37, 229–235. [Google Scholar] [CrossRef]
- Chen, L.; Shi, P.; Liu, M. Fault reconstruction for Markovian jump systems with iterative adaptive observer. Automatica 2019, 105, 254–263. [Google Scholar] [CrossRef]
- Song, J.; Niu, Y.; Zou, Y. Asynchronous sliding mode control of Markovian jump systems with time-varying delays and partly accessible mode detection probabilities. Automatica 2018, 93, 33–41. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, W.; Li, Y. H-index for continuous-time stochastic systems with Markov jump and multiplicative noise. Automatica 2019, 105, 167–178. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, W.; Liu, X. H-index for discrete-time stochastic systems with Markovian jump and multiplicative noise. Automatica 2018, 90, 286–293. [Google Scholar] [CrossRef]
- Amato, F.; Ambrosino, R.; Ariola, M.; Cosentino, C.; De Tommasi, G. Finite-Time Stability and Control; Springer: London, UK, 2014. [Google Scholar] [CrossRef]
- Dorato, P. Short time stability in linear time-varying systems. In Proceedings of the IRE International Convention Record Part 4, New York, NY, USA, 9 May 1961; Volume 4, pp. 83–87. [Google Scholar]
- Amato, F.; Ariola, M.; Dorato, P. Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 2001, 37, 1459–1463. [Google Scholar] [CrossRef]
- Amato, F.; Ambrosino, R.; Ariola, M.; De Tommasi, G. Robust finite-time stability of impulsive dynamical linear systems subjective to norm-bounded uncertainties. Int. J. Robust Nonlinear Control 2011, 21, 1080–1092. [Google Scholar] [CrossRef]
- Amato, F.; Ariola, M.; Cosentino, C. Finite-time stability of linear time-varying systems: Analysis and controller design. IEEE Trans. Autom. Control 2010, 55, 1002–1008. [Google Scholar] [CrossRef]
- Amato, F.; Ambrosino, R.; Ariola, M.; De Tommasi, G.; Pironti, A. On the finite-time boundedness of linear systems. Automatica 2019, 107, 454–466. [Google Scholar] [CrossRef]
- Mu, X.; Li, X.; Fang, J.; Wu, X. Reliable observer-based finite-time H∞ control for networked nonlinear semi-Markovian jump systems with actuator fault and parameter uncertainties via dynamic event-triggered scheme. Inf. Sci. 2021, 546, 573–595. [Google Scholar] [CrossRef]
- Tartaglione, G.; Ariola, M.; Cosention, C.; De Tommasi, G.; Pironti, A.; Amato, F. Annular finite-time stability analysis and synthesis of stochastic linear time-varying systems. Int. J. Control 2021, 94, 2252–2263. [Google Scholar] [CrossRef]
- Tartaglione, G.; Ariola, M.; Amato, F. Conditions for annular finite-time stability of Itô stochastic linear time-varying syetems with Markov switching. IET Control Theory Appl. 2019, 14, 626–633. [Google Scholar] [CrossRef]
- Gholami, H.; Shafiei, M. Finite-time H∞ static and dynamic output feedback control for a class of switched nonlinear time-delay systems. Appl. Math. Comput. 2021, 389, 125557. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, W.; Zhang, G. Finite-time stability and stabilization of Itô stochastic systems with Markovian switching: Mode-dependent parameter approach. IEEE Trans. Autom. Control 2015, 60, 2428–2433. [Google Scholar] [CrossRef]
- Yan, Z.; Song, Y.; Liu, X. Finite-time stability and stabilization for Itô-type stochastic Markovian jump systems with generally uncertain transition rates. Appl. Math. Comput. 2018, 321, 512–525. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Y.; Fei, Z.; Huang, H.; Misra, S. Stability analysis and stabilization of Markovian jump systems with time-varying delay and uncertain transition information. Int. J. Robust Nonlinear Control 2018, 28, 68–85. [Google Scholar] [CrossRef]
- Wang, G.; Li, L.; Zhang, Q.; Yang, C. Robust finite-time stability and stabilization of uncertain Markovian jump systems with time-varying delay. J. Frankl. Inst. 2017, 293, 377–393. [Google Scholar] [CrossRef]
- Bai, Y.; Sun, H.; Wu, A. Finite-time stability and stabilization of Markovian jump linear systems subject to incomplete transition descriptions. Int. J. Control Autom. Syst. 2021, 19, 2999–3012. [Google Scholar] [CrossRef]
- Petersen, I. Guaranteed cost control of stochastic uncertain systems with slop bounded nonlinearities via the use of dynamic multipliers. Automatica 2011, 47, 411–417. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Q.; Zhu, B. Fuzzy stochastic optimal guaranteed cost control of bio-economic singular Markovian jump systems. IEEE Trans. Cybern. 2015, 45, 2512–2521. [Google Scholar] [CrossRef] [PubMed]
- Qayyum, A.; Pironti, A. On finite-time stability with guaranteed cost control of uncertain linear systems. Kybernetika 2018, 54, 1071–1090. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, G.; Wang, J.; Zhang, W. State and output feedback finite-time guaranteed cost control of linear Itô stochastic systems. J. Syst. Sci. Complex. 2015, 28, 813–829. [Google Scholar] [CrossRef]
- Yan, Z.; Park, J.; Zhang, W. Finite-time guaranteed cost control for Itô stochastic Markovian jump systems with incomplete transition rates. Int. J. Robust Nonlinear Control 2017, 27, 66–83. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Q.; Li, Y. Finite-time guaranteed cost control for uncertain mean-field stochastic systems. J. Frankl. Inst. 2020, 357, 2813–2829. [Google Scholar] [CrossRef]
- Yan, Z.; Song, Y.; Park, J. Finite-time H2/H∞ control for linear Itô stochastic Markovian jump systems: Mode-dependent approach. IET Control Theory Appl. 2020, 14, 3557–3567. [Google Scholar] [CrossRef]
- Oksendal, B. Stochastic Differential Equations: An Introduction with Applications, 5th ed.; Springer: New York, NY, USA, 2000. [Google Scholar] [CrossRef]
- Ouellette, D. Schur complements and statistics. Linear Algebra Appl. 1981, 36, 187–295. [Google Scholar] [CrossRef]
- Mao, X.; Yuan, C. Stochastic Differential Equations with Markovian Switching; Imperial College Press: London, UK, 2006. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Li, W.; Yao, C.; Li, Y. Finite-Time Guaranteed Cost Control for Markovian Jump Systems with Time-Varying Delays. Mathematics 2022, 10, 2028. https://doi.org/10.3390/math10122028
Liu X, Li W, Yao C, Li Y. Finite-Time Guaranteed Cost Control for Markovian Jump Systems with Time-Varying Delays. Mathematics. 2022; 10(12):2028. https://doi.org/10.3390/math10122028
Chicago/Turabian StyleLiu, Xikui, Wencong Li, Chenxin Yao, and Yan Li. 2022. "Finite-Time Guaranteed Cost Control for Markovian Jump Systems with Time-Varying Delays" Mathematics 10, no. 12: 2028. https://doi.org/10.3390/math10122028
APA StyleLiu, X., Li, W., Yao, C., & Li, Y. (2022). Finite-Time Guaranteed Cost Control for Markovian Jump Systems with Time-Varying Delays. Mathematics, 10(12), 2028. https://doi.org/10.3390/math10122028