
Adaptive Memoryless Sliding Mode Control of Uncertain Rössler Systems with Unknown Time Delays



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
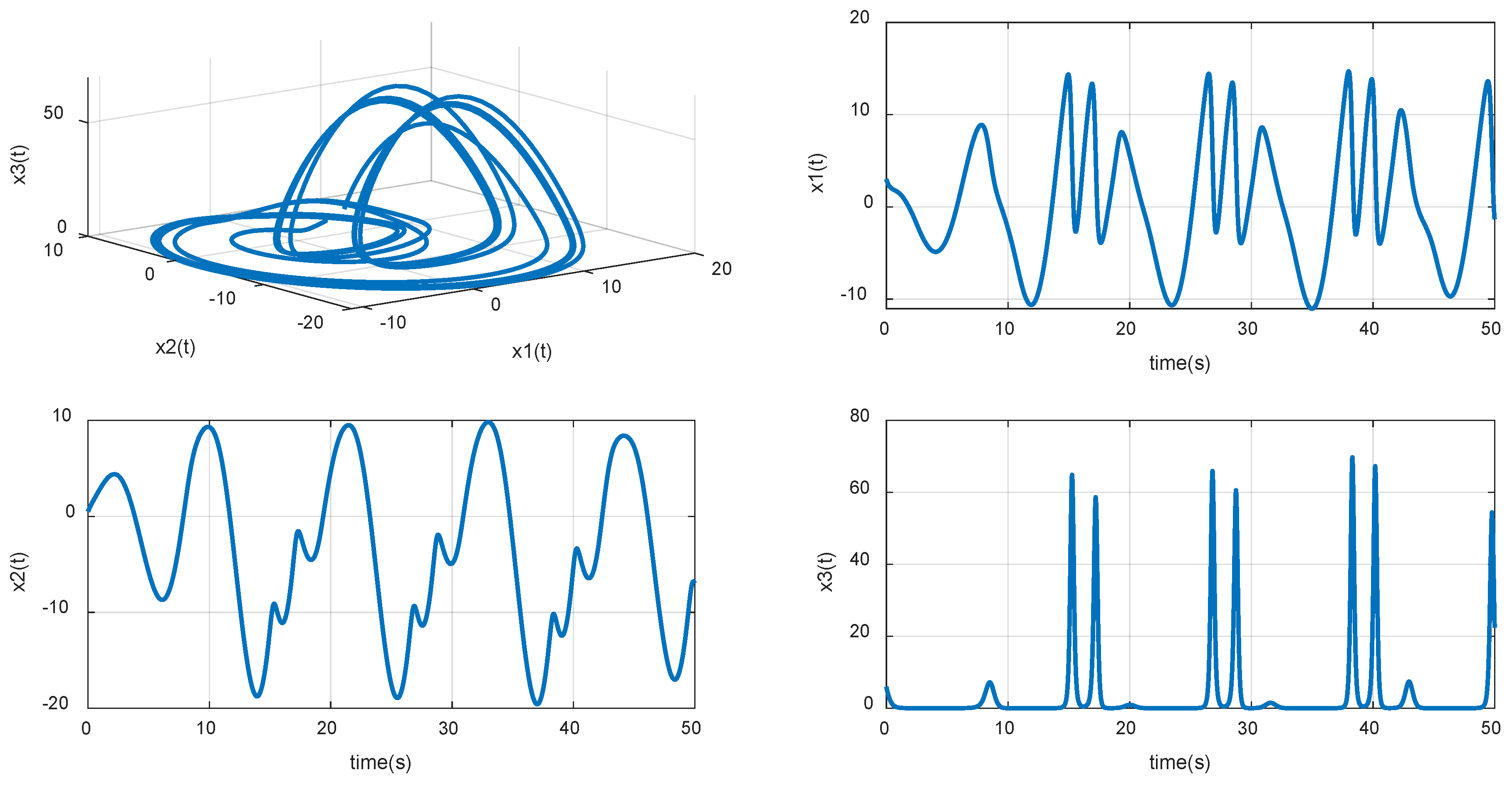
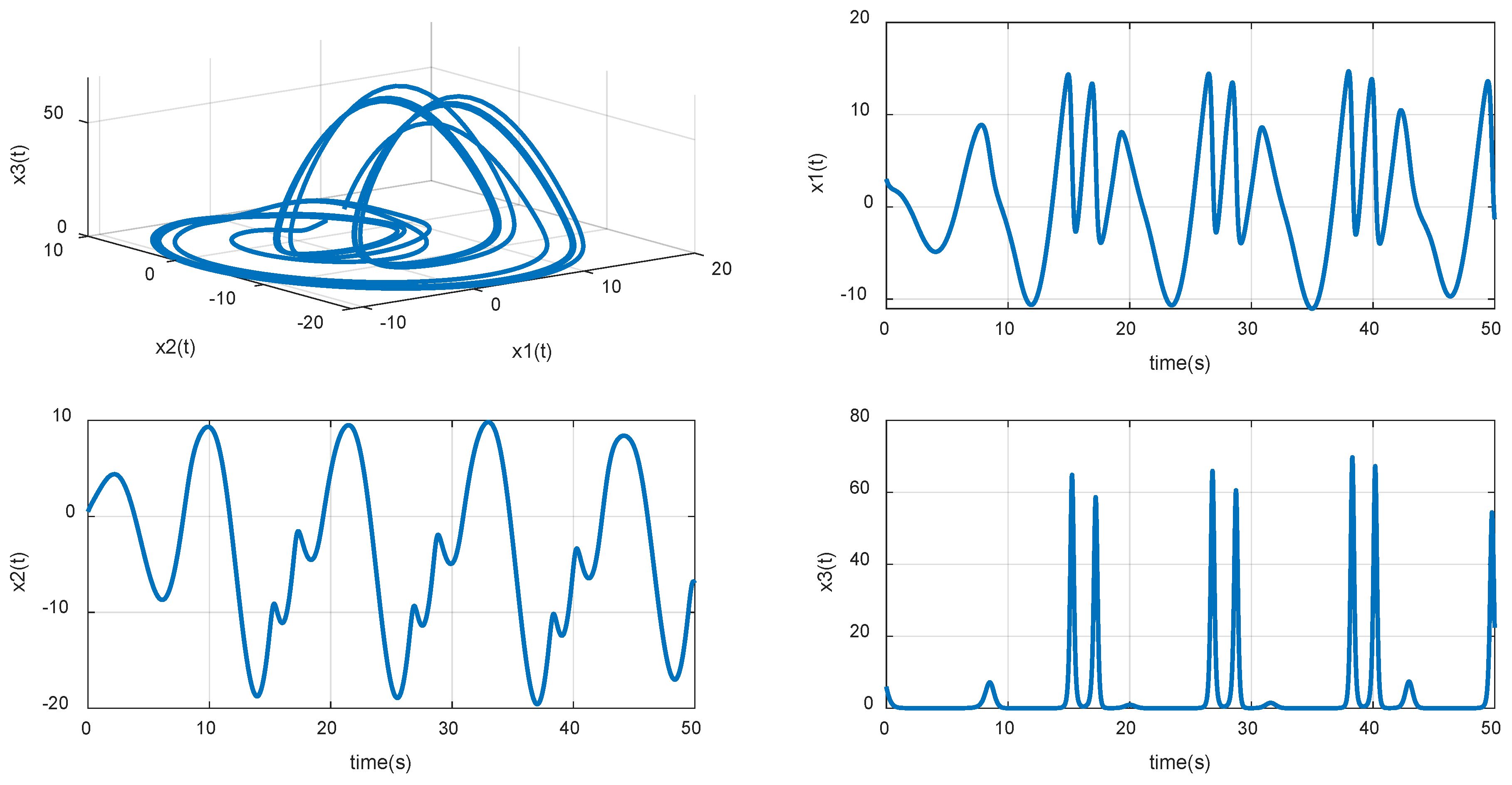
2. System Description and Problem Formulation
3. Lyapunov Exponents
- LE < 0, the orbit attracts to a fixed point or stable periodic orbit.
- LE = 0, the orbit is an eventually fixed point.
- LE > 0, the orbit is unstable chaos.
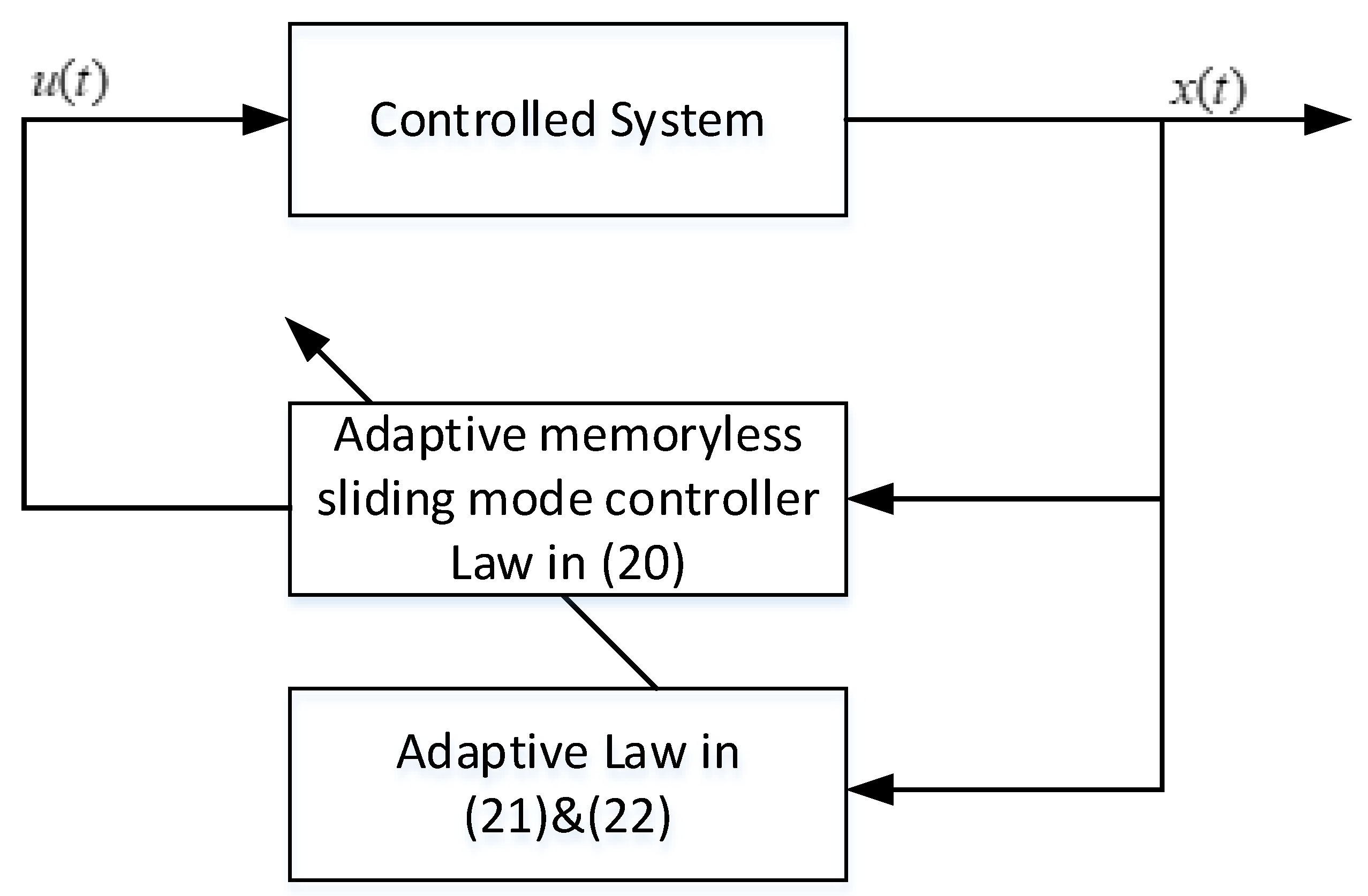
4. Robust Adaptive Control for Uncertain Chaos System with Unknown Time Delays
5. Adaptive Memoryless Controller Design for Sliding Motion
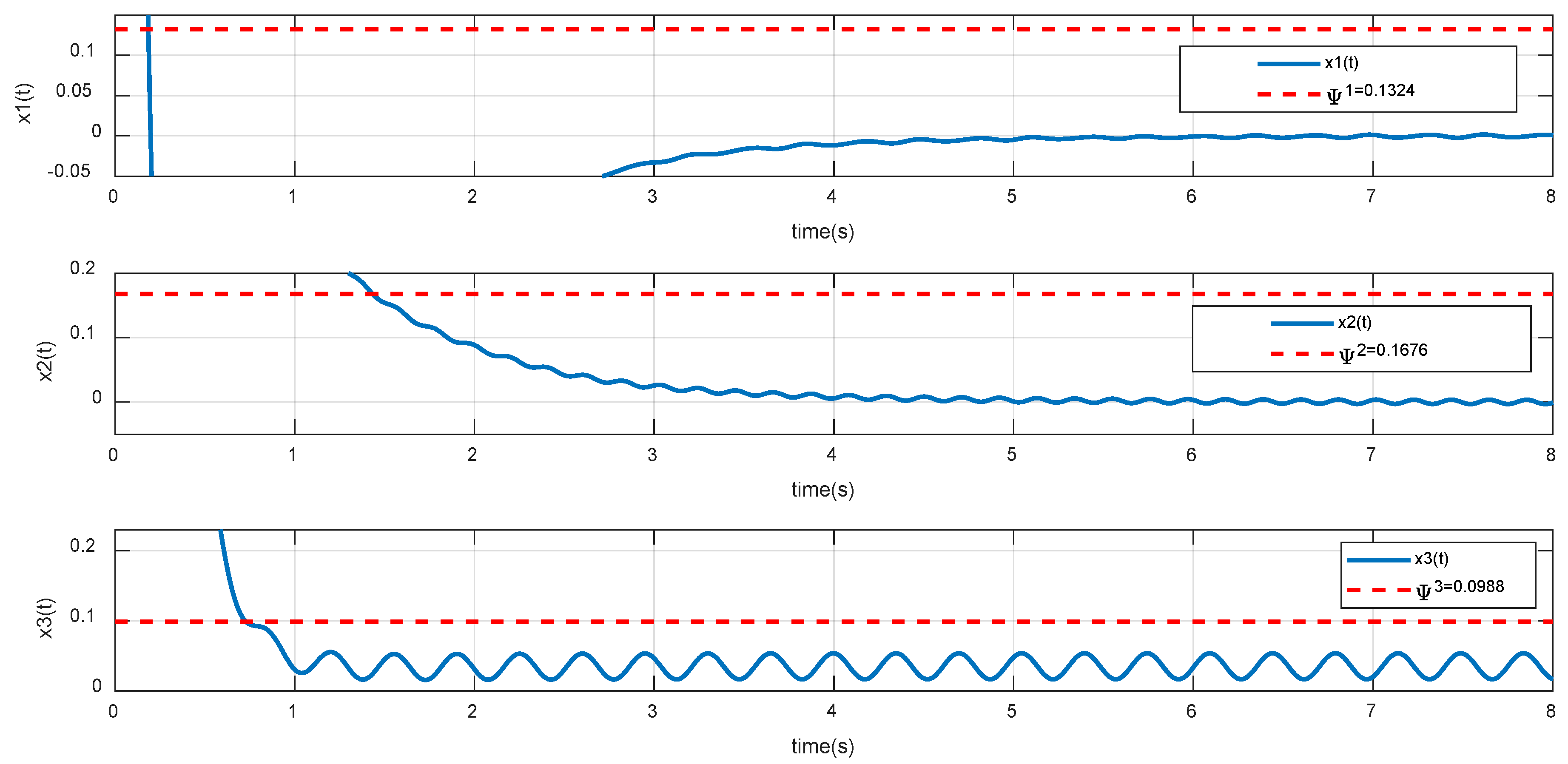
6. Numerical Simulations
6.1. Robust Control with Matched Disturbances
6.2. Robust Control with Unmatched Uncertainty
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bukhari, A.H.; Raja, M.A.Z.; Rafiq, N.; Shoaib, M.; Kiani, A.K.; Shu, C.M. Design of intelligent computing networks for nonlinear chaotic fractional Rossler system. Chaos Solitons Fractals 2022, 157, 111985. [Google Scholar] [CrossRef]
- Liu, X.; Chu, Y.; Liu, Y. Bifurcation and chaos in a host-parasitoid model with a lower bound for the host. Adv. Differ. Equ. 2018, 2018, 31. [Google Scholar] [CrossRef] [Green Version]
- Richard, J.P. Time-delay systems: An overview of some recent advances and open problems. Automatica 2003, 39, 1667–1694. [Google Scholar] [CrossRef]
- Park, P.; Lee, W.I.; Lee, S.Y. Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. J. Frankl. Inst. 2015, 352, 1378–1396. [Google Scholar] [CrossRef]
- Zhang, C.K.; He, Y.; Jiang, L.; Wu, M.; Zeng, H.B. Stability analysis of systems with time-varying delay via relaxed integral inequalities. Syst. Control Lett. 2016, 92, 52–61. [Google Scholar] [CrossRef] [Green Version]
- Qian, W.; Yuan, M.; Wang, L.; Bu, X.; Yang, J. Stabilization of systems with interval time-varying delay based on delay decomposing approach. ISA Trans. 2017, 70, 1–6. [Google Scholar] [CrossRef]
- Qian, W.; Gao, Y.; Chen, Y.; Yang, J. The stability analysis of time-varying delayed systems based on new augmented vector method. J. Frankl. Inst. 2019, 356, 1268–1286. [Google Scholar] [CrossRef]
- Michiels, W.; Niculescu, S.I. Stability and Stabilization of Time-Delay Systems: An Eigenvalue-Based Approach; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Zeng, H.B.; He, Y.; Wu, M.; She, J. New results on stability analysis for systems with discrete distributed delay. Automatica 2015, 60, 189–192. [Google Scholar] [CrossRef]
- Sakthivel, R.; Santra, S.; Mathiyalagan, K.; Anthoni, S.M. Observer-based control for switched networked control systems with missing data. Int. J. Mach. Learn. Cybern. 2015, 6, 677–686. [Google Scholar] [CrossRef]
- Yang, R.; Sun, L. Finite-time robust control of a class of nonlinear time-delay systems via Lyapunov functional method. J. Frankl. Inst. 2019, 356, 1155–1176. [Google Scholar] [CrossRef]
- Liu, K.; Seuret, A.; Xia, Y.; Gouaisbaut, F.; Ariba, Y. Bessel-laguerre inequality and its application to systems with infinite distributed delays. Automatica 2019, 109, 108562. [Google Scholar] [CrossRef]
- Zhu, J.-W.; Gu, C.-Y.; Ding, S.X. A new observer-based cooperative fault-tolerant tracking control method with application to networked multi-axis motion control system. IEEE Trans. Ind. Electron. 2021, 68, 7422–7432. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, P.; Qiu, J.; Nguang, S.K. A novel observer-based output feedback controller design for discrete-time fuzzy systems. IEEE Trans. Fuzzy Syst. 2015, 23, 223–229. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Wu, H.N. New insight into the simultaneous policy update algorithms related to h∞ state feedback control. Inf. Sci. 2019, 484, 84–94. [Google Scholar] [CrossRef]
- Robert, B.A.; Stéphane, M.; Pier, M.; Erik, B. Nonlinear characterization of a Rossler system under periodicclosed-loop control via time-frequency and bispectral analysis. Mech. Syst. Signal Process. 2018, 99, 567–585. [Google Scholar]
- Cong, S.; Yin, L.P. Exponential stability conditions for switched linear stochastic systems with time-varying delay. IET Control Theory Appl. 2012, 6, 2453–2459. [Google Scholar] [CrossRef]
- Léchappé, V.; Moulay, E.; Plestan, F.; Glumineau, A.; Chriette, A. New predictive scheme for the control of LTI systems with inputdelay and unknown disturbances. Automatica 2015, 52, 179–184. [Google Scholar] [CrossRef] [Green Version]
- Gong, C.; Zhu, G.; Wu, L. New weighted integral inequalities and its application to exponential stability analysis of time-delay systems. IEEE Access 2016, 4, 6231–6237. [Google Scholar] [CrossRef]
- Barreau, M.; Seuret, A.; Gouaisbaut, F. Wirtinger-based exponential stability for time-delay systems. IFAC-PapersOnLine 2017, 50, 11984–11989. [Google Scholar] [CrossRef]
- Xu, S.; Lam, J.; Zhong, M. New exponential estimates for time-delay systems. IEEE Trans. Autom. Control 2006, 51, 1501–1505. [Google Scholar] [CrossRef] [Green Version]
- Trinh, H. Exponential stability of time-delay systems via new weighted integral inequalities. Appl. Math. Comput. 2016, 275, 335–344. [Google Scholar]
- Zhang, X.; Liu, X.; Wang, Y.; Wang, X. Necessary conditions of exponential stability for a class of linear uncertain systems with a single constant delay. J. Frankl. Inst. 2019, 356, 4043–4060. [Google Scholar] [CrossRef]
- Zeng, H.B.; Liu, X.G.; Wang, W. A generalized free-matrix-based integral inequality for stability analysis of time-varying delay systems. Appl. Math. Comput. 2019, 354, 1–8. [Google Scholar] [CrossRef]
- Tianzeng, L.; Yu, W.; Xiaofeng, Z. Bifurcation analysis of a first time-delay chaotic system. Adv. Differ. Equ. 2019, 2019, 78. [Google Scholar] [CrossRef]
- Deeborah, H.H.; Andrew, M.G.; William, G.M. Calculus Single and Multivariable 4th Edition with Study Guide; John & Wiley and Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Xiaochen, M. Bifurcation, Synchronization, and Multistability of Two Interacting Networks with Multiple Time Delays. Int. J. Bifurc. Chaos 2016, 26, 673–700. [Google Scholar] [CrossRef]
- Guo, Q.; Sun, Z.; Xu, W. Stochastic Bifurcations in a Birhythmic Biological Model with Time-Delayed Feedbacks. Int. J. Bifurc. Chaos 2018, 28, 1850048. [Google Scholar] [CrossRef]
- Sun, B.; Li, M.; Zhang, F.; Wang, H.; Liu, J. The characteristics and self-time-delay synchronization of two-time-delay complex Lorenz system. J. Frankl. Inst. 2019, 356, 334–350. [Google Scholar] [CrossRef]
- Guo, Q.; Sun, Z.; Xu, W. Bifurcations in a fractional birhythmic biological system with time delay. Commun. Nonlinear Sci. Numer. Simul. 2019, 72, 318–328. [Google Scholar] [CrossRef]
- Yoshiki, S.; Keiji, K. Delay-induced stabilization of coupled oscillators. Nonlinear Theory Its Appl. IEICE 2021, 12, 612–624. [Google Scholar]
- Goryunov, V.E. Features of the Computational Implementation of the Algorithm for Estimating the Lyapunov Exponents of Systems with Delay. Autom. Control. Comput. Sci. 2021, 55, 877–884. [Google Scholar] [CrossRef]
- Devaney, R.L. An Introduction to Chaotic Dynamical Systems; CRC Press: Boca Raton, FL, USA, 2019; ISBN 9780429502309. [Google Scholar]
- Marek, B.; Artur, D.; Barbara, B.O.; Andrzej, S. Determining Lyapunov exponents of non-smooth systems: Perturbation vectors approach. Mech. Syst. Signal Process. 2020, 141, 106734. [Google Scholar] [CrossRef]
- Ahmad, I.; Shafiq, M. Oscillation free robust adaptive synchronization of chaotic systems with parametric uncertainties. Trans. Inst. Meas. Control. 2020, 42, 1977–1996. [Google Scholar] [CrossRef]
- Sumantri, B.; Uchiyama, N.; Sano, S. Least square based sliding mode control for a quad-rotor helicopter and energy saving by chattering reduction. Mech. Syst. Signal Process. 2016, 66–67, 769–784. [Google Scholar] [CrossRef]
- Sundarapandian, V. Adaptive Control and Synchronization of the Uncertain Sprott H System. Int. J. Adv. Sci. Technol. 2011, 2, 28–36. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.-J.; Kuo, H.-H. Adaptive Memoryless Sliding Mode Control of Uncertain Rössler Systems with Unknown Time Delays. Mathematics 2022, 10, 1885. https://doi.org/10.3390/math10111885
Yan J-J, Kuo H-H. Adaptive Memoryless Sliding Mode Control of Uncertain Rössler Systems with Unknown Time Delays. Mathematics. 2022; 10(11):1885. https://doi.org/10.3390/math10111885
Chicago/Turabian StyleYan, Jun-Juh, and Hang-Hong Kuo. 2022. "Adaptive Memoryless Sliding Mode Control of Uncertain Rössler Systems with Unknown Time Delays" Mathematics 10, no. 11: 1885. https://doi.org/10.3390/math10111885
APA StyleYan, J.-J., & Kuo, H.-H. (2022). Adaptive Memoryless Sliding Mode Control of Uncertain Rössler Systems with Unknown Time Delays. Mathematics, 10(11), 1885. https://doi.org/10.3390/math10111885