
Recent Robots in STEAM Education



Abstract
1. Introduction
2. STEAM Education
3. Robotics in STEAM Education
4. Robots That Can Be Used in Education
5. Programming Languages
6. Classification of Robots—Results
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pachidis, T.; Vrochidou, E.; Kaburlasos, V.G.; Kostova, S.; Bonkovic, M.; Papic, V. Social robotics in education: State-of-the-art and directions. In International Conference on Robotics in Alpe-Adria Danube Region; Aspragathos, N., Koustoumpardis, P., Moulianitis, V., Eds.; Springer: Cham, Germany, 2018; Volume 67, pp. 689–700. [Google Scholar]
- Alimisis, D. Educational robotics: Open questions and new challenges. Themes Sci. Technol. Educ. 2013, 6, 63–71. [Google Scholar]
- Atmatzidou, S.; Demetriadis, S. A Didactical Model for Educational Robotics Activities: A Study on Improving Skills through Strong or Minimal Guidance. In Educational Robotics in the Makers Era; Springer: Cham, Germany, 2016; pp. 58–72. [Google Scholar] [CrossRef]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Komis, V.; Romero, M.; Misirli, A. A Scenario-Based Approach for Designing Educational Robotics Activities for Co-Creative Problem Solving. In Educational Robotics in the Makers Era; Springer: Cham, Germany, 2016; pp. 158–169. [Google Scholar] [CrossRef]
- Vygotsky, L.S. Mind in Society: The Development of Higher Psychological; Harvard University Press: Cambridge, MA, USA, 1978. [Google Scholar]
- Günbatar, M.S.; Bakırcı, H. STEM teaching intention and computational thinking skills of pre-service teachers. Educ. Inf. Technol. 2019, 24, 1615–1629. [Google Scholar] [CrossRef]
- Román-Graván, P.; Hervás-Gómez, C.; Martín Padilla, A.H.; Fernández Márquez, E. Perceptions about the Use of Educational Robotics in the Initial Training of Future Teachers: A Study on STEAM Sustainability among Female Teachers. Sustainability 2020, 12, 4154. [Google Scholar] [CrossRef]
- Nuangchalerm, P.; Prachagool, V.; Prommaboon, T.; Juhji, J.; Imroatun, I.; Khaeroni, K. Views of Primary Thai Teachers toward STREAM Education. Int. J. Eval. Res. Educ. 2020, 9, 987–992. [Google Scholar] [CrossRef]
- Karim, M.E.; Lemaignan, S.; Mondada, F. A review: Can robots reshape K-12 STEM education? In Proceedings of the IEEE International Workshop on Advanced Robotics and Its Social Impacts (ARSO 2015), Lyon, France, 1–3 July 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Miller, D.P.; Nourbakhsh, I. Robotics for Education. In Springer Handbook of Robotics; Siciliano, D., Khatib, O., Eds.; Springer Science & Business Media: Berlin, Germany, 2016; pp. 2115–2134. [Google Scholar] [CrossRef]
- Bravo, F.; Hurtado, J.; González, E. Using Robots with Storytelling and Drama Activities in Science Education. Educ. Sci. 2021, 11, 329. [Google Scholar] [CrossRef]
- Bellas, F.; Naya, M.; Varela, G.; Llamas, L.; Prieto, A.; Becerra, J.C.; Bautista, M.; Faina, A.; Duro, R. The Robobo Project: Bringing Educational Robotics Closer to Real-World Applications. In Robotics in Education. RiE 2017; Springer: Cham, Germany, 2018. [Google Scholar] [CrossRef]
- Karkazis, P.; Balourdos, P.; Pitsiakos, G.; Asimakopoulos, K.; Saranteas, I.; Spiliou, T.; Roussou, D. To water or not to water: The Arduino approach for the irrigation of a field. Int. J. Smart Educ. Urban Soc. 2018, 9, 25–36. [Google Scholar] [CrossRef]
- Moro, M.; Agatolio, F.; Menegatti, E. The development of robotic enhanced curricula for the RoboESL project: Overall evaluation and expected outcomes. Int. J. Smart Educ. Urban Soc. 2018, 9, 48–60. [Google Scholar] [CrossRef]
- Altin, H.; Pedaste, M. Learning approaches to applying robotics in Science Education. J. Balt. Sci. Educ. 2013, 12, 365–377. [Google Scholar] [CrossRef]
- Barnes, J.; FakhrHosseini, S.M.; Vasey, E.; Park, C.H.; Jeon, M. Child-Robot Theater: Engaging Elementary Students in Informal STEAM Education Using Robots. IEEE Pervasive Comput. 2020, 19, 22–31. [Google Scholar] [CrossRef]
- Chatzopoulos, A.; Papoutsidakis, M.; Kalogiannakis, M.; Psycharis, S. Action Research Implementation in Developing an Open Source and Low Cost Robotic Platform for STEM Education. Int. J. Comput. Appl. 2019, 178, 33–46. [Google Scholar] [CrossRef]
- Eguchi, A.; Okada, H. Learning with social robots—The World Robot Summit’s approach. In Proceedings of the IEEE Integrated STEM Education Conference (ISEC), Princeton, NJ, USA, 10 March 2018. [Google Scholar] [CrossRef]
- Psycharis, S.; Kotzampasaki, E. The Impact of a STEM Inquiry Game Learning Scenario on Computational Thinking and Computer Self-Confidence. EURASIA J. Math. Sci. Technol. Educ. 2019, 15, em1689. [Google Scholar] [CrossRef]
- Sullivan, A.; Strawhacker, A. Screen-Free STEAM: Low-Cost and Hands-on Approaches to Teaching Coding and Engineering to Young Children. In Embedding STEAM in Early Childhood Education and Care; Cohrssen, C., Garvis, S., Eds.; Palgrave Macmillan: Cham, Germany, 2021; pp. 87–113. [Google Scholar]
- Kazakoff, E.R.; Sullivan, A.; Bers, M.U. The effect of a classroom-based intensive robotics and programming workshop on sequencing ability in early childhood. J. Early Child. Educ. 2013, 41, 245–255. [Google Scholar] [CrossRef]
- Kucuk, S.; Sisman, B. Behavioral patterns of elementary students and teachers in one-to-one robotics instruction. Comput. Educ. 2017, 111, 31–43. [Google Scholar] [CrossRef]
- BrickEconomy Home Page. Available online: https://www.brickeconomy.com/set/31313-1/lego-mindstorms-ev3 (accessed on 19 November 2022).
- Alimisis, D.; Moro, M.; Arlegui, J.; Pina, A.; Frangou, S.; Papanikolaou, K. Robotics & Constructivism in Education: The TERECoP project. In EuroLogo 2007, 40 Years of Influence on Education, Proceedings of the 11th European Logo Conference, 19–24 August 2007; Kalas, I., Ed.; Comenius University: Bratislava, Slovakia, 2007. [Google Scholar]
- Goh, H.; Ali, M.B.B. Robotics As a Tool to STEM Learning. Int. J. Innov. Educ. Res. 2014, 2, 66–78. [Google Scholar] [CrossRef]
- Kim, S.W.; Lee, Y. The analysis on research trends in programming based STEAM education in Korea. Indian J. Sci. Technol. 2016, 9, 1–11. [Google Scholar] [CrossRef]
- Fernandes, E.; Fermé, E.; Oliveira, R. Using Robots to Learn Functions in Math Class. 2017. Available online: http://cee.uma.pt/people/faculty/elsa.fernandes/artigos/ICMI17.pdf (accessed on 2 December 2021).
- Edison Home Page. Available online: https://meetedison.com/wp-content/uploads/2016/09/Edison-V2.0-Educational-robot.jpg (accessed on 19 November 2022).
- Ververi, C.; Koufou, T.; Moutzouris, A.; Andreou, L.V. Introducing Robotics to an English for Academic Purposes Curriculum in Higher Education: The Student Experience. In Proceedings of the 2020 IEEE Global Engineering Education Conference (EDUCON), Porto, Portugal, 27–30 April 2020. [Google Scholar] [CrossRef]
- Thymio Home Page. Available online: http://www.thymio.gr/ (accessed on 19 November 2022).
- Riedo, F.; Chevalier, M.; Magnenat, S.; Mondada, F. Thymio ii, a robot that grows wiser with children. In Proceedings of the 2013 IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO), Tokyo, Japan, 7–9 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 187–193. [Google Scholar]
- Riedo, F.; Retornaz, P.; Bergeron, L.; Nyffeler, N.; Mondada, F. A Two Years Informal Learning Experience Using the Thymio Robot. In Advances in Autonomous Mini Robots; Springer: Berlin/Heidelberg, Germany, 2012; pp. 37–48. [Google Scholar]
- Generation Robots Home Page. Available online: https://www.generationrobots.com/en/401213-mobile-robot-thymio-2.html (accessed on 19 November 2022).
- Aldebaran Home Page. Available online: https://www.aldebaran.com/en/pepper (accessed on 19 November 2022).
- Bots.co.uk Home Page. Available online: https://bots.co.uk/pepper-robot-price/ (accessed on 19 November 2022).
- Eguchi, A. Robotics as a Learning Tool for Educational Transformation. In Proceedings of the 4th International Workshop Teaching Robotics, Teaching with Robotics & 5th International Conference Robotics in Education, Padova, Italy, 18 July 2014; pp. 27–34. [Google Scholar]
- Lopez-Caudana, E.; Ramirez-Montoya, M.S.; Martínez-Pérez, S.; Rodríguez-Abitia, G. Using Robotics to Enhance Active Learning in Mathematics: A Multi-Scenario Study. Mathematics 2020, 8, 2163. [Google Scholar] [CrossRef]
- STEM SUPPLIES Home Page. Available online: https://stem-supplies.com/nao-v6-programmable-robot (accessed on 19 November 2022).
- Mubin, O.; Stevens, C.J.; Shahid, S.; Al Mahmud, A. A Review of the Applicability of Robots in Education. J. Technol. Educ. Learn. 2013, 1, 13. [Google Scholar] [CrossRef]
- Ziouzios, D.; Rammos, D.; Bratitsis, T.; Dasygenis, M. Utilizing Educational Robotics for Environmental Empathy Cultivation in Primary Schools. Electronics 2021, 10, 2389. [Google Scholar] [CrossRef]
- Lytridis, C.; Vrochidou, E.; Chatzistamatis, S.; Kaburlasos, V. Social Engagement Interaction Games Between Children with Autism and Humanoid Robot NAO. In Proceedings of the 13th International Conference on Soft Computing Models in Industrial and Environmental Applications, San Sebastian, Spain, 6–8 June 2018; pp. 562–570. [Google Scholar]
- STEM-Toys Home Page. Available online: https://stem-toys.gr/product/beebot-2/ (accessed on 19 November 2022).
- Messer, D.; Thomas, L.; Holliman, A.; Kucirkova, N. Evaluating the effectiveness of an educational programming intervention on children’s mathematics skills, spatial awareness, and working memory. Educ. Inf. Technol. 2018, 23, 2879–2888. [Google Scholar] [CrossRef]
- Kwon, U.-J.; Nam, K.-W.; Lee, J.-H. Exploring the effects of unplugged play for children aged 3, 4, and 5: Based on Bee-bot. Int. J. Adv. Cult. Technol. 2020, 8, 239–245. [Google Scholar] [CrossRef]
- González, J.; Morales, I.; Nielsen, M.; Muñoz, L.; Villarreal, V. Improving the Teaching of Mathematics through Robotics. Proceedings 2019, 31, 5. [Google Scholar] [CrossRef]
- Di Lieto, M.C.; Inguaggiato, E.; Castro, E.; Cecchi, F.; Cioni, G.; Dell’Omo, M.; Laschi, C.; Pecini, C.; Santerini, G.; Sgandurra, G.; et al. Educational Robotics intervention on Executive Functions in preschool children: A pilot study. Comput. Hum. Behav. 2017, 71, 16–23. [Google Scholar] [CrossRef]
- Makeblock Home Page. Available online: www.makeblock.com/STEM-kits/mbot (accessed on 19 November 2022).
- Bellas, F.; Salgado, M.; Blanco, T.F.; Duro, R.J. Robotics in Primary School: A Realistic Mathematics Approach. In Smart Learning with Educational Robotics: Using Robots to Scaffold Learning Outcomes; Linda, D., Ed.; Springer International Publishing: Cham, Germany, 2019; pp. 149–182. [Google Scholar]
- Arduino Home Page. Available online: http://arduino.cc (accessed on 19 November 2022).
- Evripidou, S.; Doitsidis, L.; Tsinarakis, G.; Zinonos, Z.; Chatzichristofis, S.A. Selecting a Robotic Platform for Education. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 6–8 January 2022; pp. 1–6. [Google Scholar]
- Makey Makey Home Page. Available online: http://bit.ly/placa-makey-makey (accessed on 19 November 2022).
- Tengler, K.; Sabitzer, B.; Kastner-Hauler, O. First Programming with Ozobots-A Creative Approach to Early Computer Science In Primary Education. In Proceedings of the INTED2020 Conference, Valencia, Spain, 2–4 March 2020; pp. 5156–5163. [Google Scholar]
- Tengler, K.; Sabitzer, B.; Kastner-Hauler, O. Enhancing Computational Thinking Skills using Robots and Digital Storytelling. In Proceedings of the 13th International Conference on Computer Supported Education (CSEDU 2021), Online, 23–25 April 2021; Volume 1, pp. 157–164. [Google Scholar] [CrossRef]
- Özgür1, A.; Lemaignan, S.; Johal, W.; Beltran, M.; Briod, M.; Pereyre, L.; Mondada, F.; Dillenbourg, P. Cellulo: Versatile Handheld Robots for Education. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, HRI ’17, Vienna, Austria, 6–9 March 2017; pp. 119–127. [Google Scholar] [CrossRef]
- Gonzalez-Gomez, J.; Valero-Gomez, A.; Prieto-Moreno, A.; Abderrahim, M. A New Open Source 3D-printable Mobile Robotic Platform for Education. In Proceedings of the 6th International Symposium on Autonomous Minirobots for Research and Edutainment, Bielefeld, Germany, 23–25 May 2011; pp. 23–25. [Google Scholar]
- MakerBot Thingiverse Home Page. Available online: https://www.thingiverse.com/ (accessed on 19 November 2022).
- GitHub Home Page. Available online: https://github.com (accessed on 19 November 2022).
- MakerBot Thingiverse Otto DIY+ Home Page. Available online: https://www.thingiverse.com/thing:2398231 (accessed on 19 November 2022).
- Meirinhos, C.; Fernandes, L. Tangible Objects in ESL Classroom: Impact in Learning at Primary School Level. In Hands-On Science: Education Activities—Challenges and Opportunities of Distant and Online Teaching and Learning; Costa, M.F., Dorrío, B.V., Eds.; Hands-On Science Network: Braga, Portugal, 2021; p. 232. [Google Scholar]
- Otto Builders Home Page. Available online: https://builders.ottodiy.com/ (accessed on 19 November 2022).
- Ottodiy Home Page. Available online: https://www.ottodiy.com/ (accessed on 19 November 2022).
- Ottodiy Games Home Page. Available online: https://www.ottodiy.com/games (accessed on 19 November 2022).
- GitHub Fossbot Home Page. Available online: https://github.com/eellak/fossbot (accessed on 19 November 2022).
- EELLAK Home Page. Available online: https://openhardware.ellak.gr/wp-content/uploads/sites/13/2022/04/front_unc.png (accessed on 19 November 2022).
- Chronis, C.; Varlamis, I. FOSSBot: An Open Source and Open Design Educational Robot. Electronics 2022, 11, 2606. [Google Scholar] [CrossRef]
- Lee, Y.D.; Chung, J.I. The effects of middle school mathematical statistics area and Python programming STEAM instruction on problem solving ability and curriculum interest. J. Korea Acad.-Ind. Coop. Soc. 2019, 20, 336–344. [Google Scholar]
- Svistkov, A.I.; Sutchenkov, A.A.; Tikhonov, A.I. STEM and STEAM Technologies in Problem Solving with Python. In Proceedings of the 3rd International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE), Moscow, Russia, 1 April 2021; IEEE: Piscataway, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Iwamoto, T.; Matsumoto, S. Development of Web-Based Programming Learning Support System with Graph Drawing of Mathematics as a Learning Task. In Proceedings of the 2019 8th International Congress on Advanced Applied Informatics (IIAI-AAI), Toyama, Japan, 7–11 July 2019; pp. 302–305. [Google Scholar] [CrossRef]
- Tumlin, N. Teacher Configurable Coding Challenges for Block Languages. In Proceedings of the 2017 ACM SIGCSE Technical Symposium on Computer Science Education, SIGCSE ’17, Seattle, WA, USA, 8–11 March 2017; ACM Publications: New York, NY, USA; pp. 783–784. [Google Scholar]
- Scratch Home Page. Available online: https://scratch.mit.edu/ (accessed on 19 November 2022).
- De la Hoz Serrano, A.; Cañada Cañada, F.; Melo Niño, L.V.; Álvarez Murillo, A.; Cubero Juánez, J. Design of a robotic board for teaching the Water Cycle. In Proceedings of the 14th International Conference on Education and New Learning Technologies, Palma, Spain, 4–6 July 2022; pp. 2990–2993. [Google Scholar]
- Fidai, A.; Capraro, M.M.; Capraro, R.M. “Scratch”-ing computational thinking with Arduino: A meta-analysis. Think. Ski. Creat. 2020, 38, 100726. [Google Scholar] [CrossRef]
- Lee, Y.D.; Kim, S.I.; Seo, Y.H.; Kang, J.J. A Study on the Robot Education Based on Scratch. J. Converg. Cult. Technol. 2016, 2, 29–35. [Google Scholar] [CrossRef]
- Korkmaz, O. The Effect of Scratch- and Lego Mindstorms Ev3-Based Programming Activities on Academic Achievement, Problem-Solving Skills and Logical-Mathematical Thinking Skills of Students. Malays. Online J. Educ. Sci. 2016, 4, 73–88. [Google Scholar]
- Michalopoulos, P.; Mpania, S.; Karatrantou, A.; Panagiotakopoulos, C. Introducing STEM to primary education students with Arduino and S4A. In Innovating STEM Education: Increased Engagement and Best Practices; Koleza, E., Panagiotakopoulos, C., Skordoulis, C., Eds.; Common Ground Research Networks: Champaign, IL, USA, 2022; pp. 77–87. [Google Scholar]
- Pou, A.V.; Canaleta, X.; Fonseca, D. Computational Thinking and Educational Robotics Integrated into Project-Based Learning. Sensors 2022, 22, 3746. [Google Scholar] [CrossRef]
- Xefteris, S. Developing STEAM Educational Scenarios in Pedagogical Studies using Robotics. Eng. Technol. Appl. Sci. Res. 2021, 11, 7358–7362. [Google Scholar] [CrossRef]
- Maloney, J.; Resnick, M.; Rusk, N.; Silverman, B. The scratch programming language and environment. ACM Trans. Comput. Educ. 2010, 10, 1–15. [Google Scholar] [CrossRef]
- Meerbaum-Salant, O.; Haberman, B.; Pollack, S. “Computer Science, Academia and Industry” as pedagogical model to enhance Computational thinking. In Proceedings of the 2015 ACM Conference on Innovation and Technology in Computer Science Education, ITiCSE ’15, Vilnius, Lithuania, 4–8 July 2015; p. 341. [Google Scholar] [CrossRef]
- Monroy-Hernández, A. ScratchR: Sharing user-generated programmable media. In Proceedings of the 6th International Conference on Interaction Design and Children, IDC ’07, Aalborg, Denmark, 6–8 June 2007; pp. 167–168. [Google Scholar] [CrossRef]
- Anastasaki, E.; Vassilakis, K. Experimental commands development for LEGO WeDo 2.0 in Python language for STEAM robotics advanced classes. Adv. Mob. Learn. Educ. Res. 2022, 2, 443–454. [Google Scholar] [CrossRef]
- GitHub Google Blockly Home Page. Available online: https://github.com/google/blockly (accessed on 19 November 2022).
- Shih, W.C. Mining Learners’ Behavioral Sequential Patterns in a Blockly Visual Programming Educational Game. In Proceedings of the 2017 International Conference on Industrial Engineering, Management Science and Applicationa (ICIMSA), Seoul, Republic of Korea, 13–15 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–2. [Google Scholar]
- Snap Home Page. Available online: https://snap.berkeley.edu/snap/snap.html (accessed on 19 November 2022).
- Snap! Education Home Page. Available online: https://snapeducation.weebly.com/eta-pirhoomegataueta-epsilonpialphaphieta-muepsilon-tauomicron-snap.html (accessed on 19 November 2022).
- Newley, A.; Deniz, H.; Kaya, E.; Yesilyurt, E. Engaging Elementary and Middle School Students in Robotics through Hummingbird Kit with Snap! Visual Programming Language. J. Learn. Teach. Digit. Age 2016, 1, 20–26. [Google Scholar]
- Abueita, J.D.; Al Fayez, M.Q.; Alsabeelah, A.; Humaidat, M.A. The Impact of (STEAM) Approach on the Innovative Thinking and Academic Achievement of the Educational Robot Subject among Eighth Grade Students in Jordan. J. Educ. Soc. Res. 2022, 12, 188. [Google Scholar] [CrossRef]
- Choi, J.H.; Choi, H.M.; Park, J. Development and Application of STEAM Education Program Using the Lego Mindstorms Robot. J. Sci. Educ. 2018, 42, 1–11. [Google Scholar] [CrossRef]
- Matyushchenko, I.; Zvereva, E.; Lavina, T. Development of Algorithmic Thinking by Means of Lego Mindstorms Ev3 on Robotics. In Proceedings of the Ural Symposium on Biomedical Engineering, Radioelectronics and Information Technology (USBEREIT), Yekaterinburg, Russia, 14–15 May 2020. [Google Scholar] [CrossRef]
- Samara, E.; Angelidis, A.; Kotsiari, A.; Kilintzis, P.; Avlogiaris, G. Robotics in Primary and Secondary Education—The Lego Mindstorms EV3 implementation. In Proceedings of the 6th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Preveza, Greece, 24–26 September 2021. [Google Scholar]
- Valls, A. Computational Thinking and Educational Robotics Integrated into Project-Based Learning; Research Square: Durham, NC, USA, 2022. [Google Scholar] [CrossRef]
- Caliskan, E. The effects of robotics programming on secondary school students’ problem-solving skills. World J. Educ. Technol. Curr. Issues 2020, 2, 217–230. [Google Scholar] [CrossRef]
- Doddo, M.; Hsieh, S.J. Board# 121: MAKER: A Study of Multi-Robot Systems Recreated for High School Students. In Proceedings of the 2017 ASEE Annual Conference & Exposition, Columbus, OH, USA, 25–28 June 2017. [Google Scholar] [CrossRef]
- Guzzi, J.; Giusti, A.; Di Caro, G.; Gambardella, L. Mighty Thymio for University-Level Educational Robotics. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. Available online: https://ojs.aaai.org/index.php/AAAI/article/view/11402 (accessed on 19 November 2022).
- Mondada, F.; Bonani, M.; Riedo, F.; Briod, M.; Pereyre, L.; Rétornaz, P.; Magnenat, S. Bringing robotics to formal education: The thymio open-source hardware robot. IEEE Robot. Autom. Mag. 2017, 24, 77–85. [Google Scholar] [CrossRef]
- Mussati, A.; Giang, C.; Piatti, A.; Mondada, F. A Tangible Programming Language for the Educational Robot Thymio. In Proceedings of the 10th International Conference on Information, Intelligence, Systems, and Applications (IISA), Patras, Greece, 15–17 July 2019. [Google Scholar] [CrossRef]
- Vitanza, A.; Rossetti, P.; Mondada, F.; Trianni, V. Robot swarms as an educational tool: The Thymio’s way. Int. J. Adv. Robot. Syst. 2019, 16, 1–13. [Google Scholar] [CrossRef]
- Efstratiou, R.; Karatsioras, C.; Papadopoulou, M.; Papadopoulou, C.; Lytridis, C.; Bazinas, C.; Papakostas, G.A.; Kaburlasos, V.G. Teaching Daily Life Skills in Autism Spectrum Disorder (ASD) Interventions Using the Social Robot Pepper. In Robotics in Education: Methodologies and Technologies; Lepuschitz, W., Merdan, M., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Springer International Publishing: Cham, Germany, 2020; pp. 86–97. [Google Scholar]
- Guggemos, J.; Seufert, S.; Sonderegger, S. Humanoid robots in higher education: Evaluating the acceptance of Pepper in the context of an academic writing course using the UTAUT. Br. J. Educ. Technol. 2020, 51, 1864–1883. [Google Scholar] [CrossRef]
- Lee, Y.J.; Wyatt, A.; Dong, J.; Upthegrove, T.; Hale, B. Robot Musical Theater for Climiate Change Education. In Proceedings of the 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Sapporo, Japan, 7–10 March 2022; pp. 870–874. [Google Scholar]
- Ko, S.; Swaim, H.; Sanghavi, H.; Dong, J.; Nadri, C.; Jeon, M. Robot-theater programs for different age groups to promote STEAM education and robotics research. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, MA, USA, 23–26 March 2020; pp. 299–301. [Google Scholar]
- Konijn, E.A.; Hoorn, J.F. Robot tutor and pupils’ educational ability: Teaching the times tables. Comput. Educ. 2020, 157, 103970. [Google Scholar] [CrossRef]
- Lopez-Caudana, E.; Rodríguez-Abitia, J.; Martínez-Pérez, S.; Anton-Ares, P.; Ramírez-Montoya, M.S. Scenarios of the use of robotics as a support tool for teaching. In Proceedings of the TEEM’21: Ninth International Conference on Technological Ecosystems for Enhancing Multiculturality (TEEM’21), Barcelona, Spain, 26–29 October 2021; pp. 38–43. [Google Scholar]
- Jeon, M.; FakhrHosseini, M.; Barnes, J.; Duford, Z.; Zhang, R. Making live theatre with multiple robots as actors bringing robots to rural schools to promote STEAM education for underserved students. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 445–446. [Google Scholar]
- Papadakis, S.; Kalogiannakis, M. Learning Computational Thinking Development in Young Children with Bee-Bot Educational Robotics. In Research Anthology on Computational Thinking, Programming, and Robotics in the Classroom; IGI Global: Hershey, PA, USA, 2022; pp. 926–947. [Google Scholar] [CrossRef]
- Mondada, F.; Bonani, M.; Raemy, X.; Pugh, J.; Cianci, C.; Klaptocz, A.; Magnenat, S.; Zufferey, J.C.; Floreano, D.; Martinoli, A. The e-puck, a Robot Designed for Education in Engineering. In Proceedings of the 9th Conference on Autonomous Robot Systems and Competitions, Castelo Branco, Portugal, 7 May 2009; pp. 59–65. [Google Scholar]
- Olivier, M. Webots: Professional Mobile Robot Simulation. Int. J. Adv. Robot. Syst. 2004, 1, 39–42. [Google Scholar]
- Trifa, V.M.; Cianci, C.M.; Guinard, D. Dynamic Control of a Robotic Swarm using a Service-Oriented Architecture. In Proceedings of the 13th International Symposium on Artificial Life and Robotics (AROB 2008), Oita, Japan, 31 January–2 February 2008. [Google Scholar]
- Sáez-López, M.J.; Sevillano-García, M.L. The effect of programming on primary school students’ mathematical and scientific understanding: Educational use of mBot. Educ. Technol. Res. Dev. 2019, 67, 1405–1425. [Google Scholar] [CrossRef]
- Khodr, H.; Brender, J.; Kothiyal, A.; Dillenbourg, P. How Diseases Spread: Embodied Learning of Emergence with Cellulo Robots. In Proceedings of the 29th International Conference on Computers in Education, Taoyuan City, Taiwan, 22–26 November 2021; Rodrigo, M.M.T., Iyer, S., Mitrovic, A., Eds.; Asia-Pacific Society for Computers in Education: Taoyuan City, Taiwan, 2021. [Google Scholar]
- Petrovič, P.; Vaško, J. An Open Solution for a Low-Cost Educational Toy. In Proceedings of the 10th International Conference on Robotics in Education, Vienna, Austria, 10–12 April 2019; Merdan, M., Lepuschitz, W., Koppensteiner, G., Balogh, R., Eds.; Springer: Cham, Germany, 2020; pp. 196–208. [Google Scholar]
- Tiao Hsieh, C. Developing programmable robot for K12 STEAM education. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1113, 012008. [Google Scholar] [CrossRef]
- Vega, J.; Canas, J.M. PiBot: An Open Low-Cost Robotic Platform with Camera for STEM Education. Electronics 2018, 7, 430. [Google Scholar] [CrossRef]
- Hirst, A.J.; Johnson, J.; Petre, M.; Price, B.A.; Richards, M. What is the best programming environment/language for teaching robotics using Lego Mindstorms? Artif. Life Robot. 2013, 7, 124–131. [Google Scholar] [CrossRef]
- García-Saura, C.; González-Gómez, J. Low cost education platform for robotics, using open-source 3D printers and open-source hardware. In Proceedings of the ICERI2012 Conference, Madrid, Spain, 19–21 November 2012; pp. 2699–2706. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | Manufacturer | Frequency of Use—Surveys that Have Been Used | Features–Flexibility Platform | Sensors | Software—Programming Language | Connection | Suggested Age | Usefulness in Education | Cost |
|---|---|---|---|---|---|---|---|---|---|
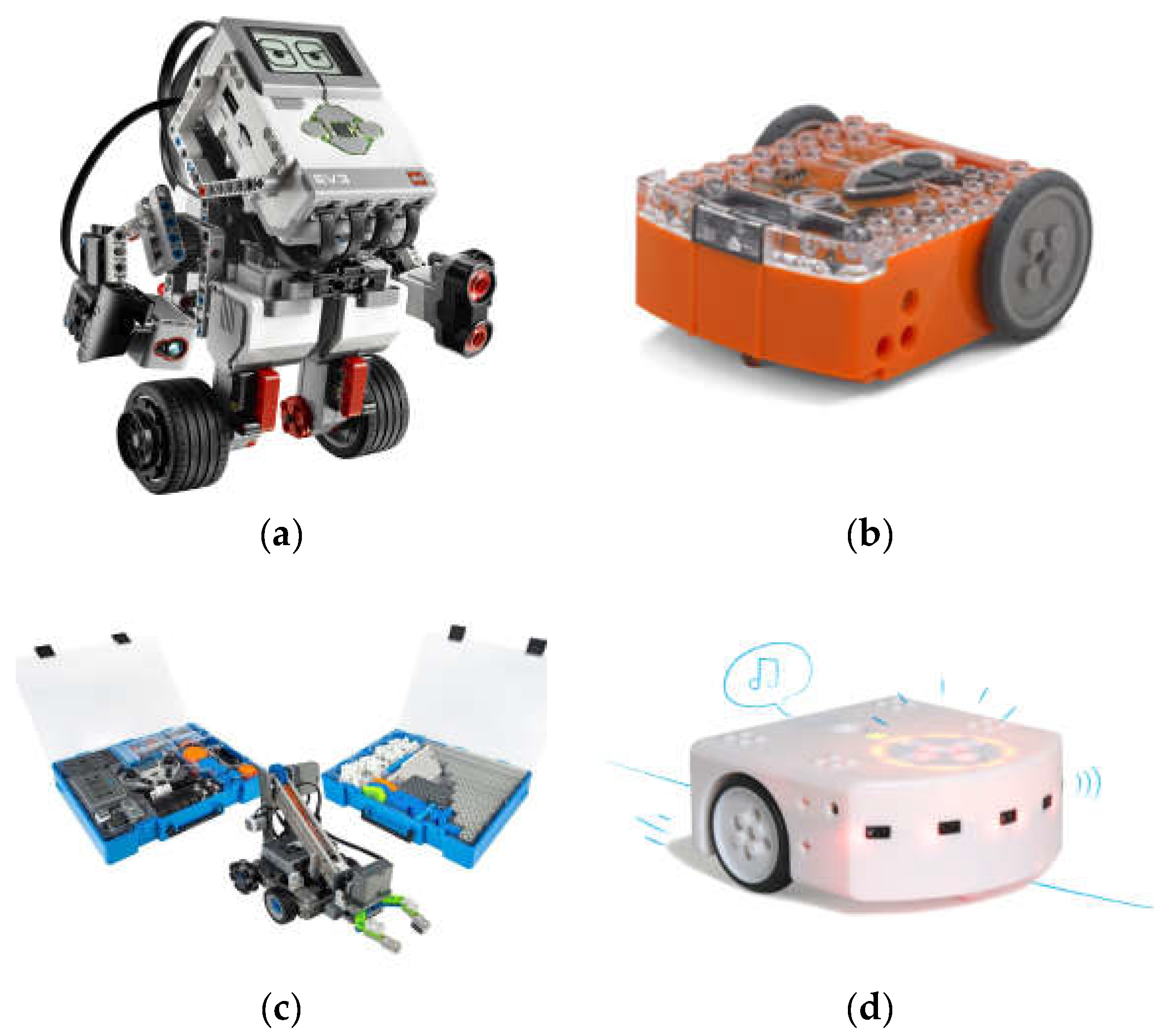
| Lego Mindstorms EV3 | Lego | 7 [69,75,88,89,90,91,92] | Package with construction materials (bricks, gears, pulleys, and shafts). Modular platform | color, speech, touch, infrared (IR), engines, gyroscope | EV 3 Software | USB, Wi-Fi, Bluetooth | High school | For teaching programming and developing algorithmic thinking. | 450 EUR (H) |
| Vex IQ Robotics | Innovation First International | 2 [93,94] | Modular platform which can be controlled from a distance. | speech, touch, color, distance, engines, gyroscope | Robotc, Modcit Visual programming | USB, Bluetooth Wireless Communication | Secondary education | Allows students to perform traditional-style programming. | 400 EUR (H) |
| Edison Robot V2 | Meetedison | 1 [30] | Movable and flexible learning platform with notches for Lego bricks and two motors with variable speed. It has a remote control and also avoids obstacles. | light, line, sound, infrared | EdBlocks, EdScratch EdPy | USB, cable with a headphone plug | Mainly large primary school classes, but can also be used by ages 4+ | Develops students’ creativity as they expand it with bricks. Children easily learn programming in a short time by playing. | 60 EUR (L) |
| Thymio | EPFL | 4 [95,96,97,98] | Small and flexible, fully assembled, mobile robot that can and does change color. It has a remote control and also avoids obstacles. | line, infrared, distance, angle, temperature, inclinometer and tilt sensor | Aseba (open- source), VPL, Scratch, Blockly | USB, Wi-Fi, Bluetooth | For all levels of education | Promotes social skills, collaboration skills, etc. | 152 EUR (M) |
| Pepper | Aldebaran Robotics in collaboration with Softbank Mobile | 4 [99,100,101,102] | A humanoid robot with a 1.2 m height and 28 kg, can be programmed to speak 15 languages. It is equipped with a fully functional tablet. It has LEDs. | touch, infrared, microphones, bumpers, radar for autonomous navigation, inertial unit, 2D and 3D cameras | open and fully programmable platform | University | Responds to human emotions and promotes the Inclusion of students with special educational needs. | 13,600 EUR (H) | |
| NAO | SoftBankRobotics | 7 [12,38,101,102,103,104,105] | Humanoid robot, size 58 cm, weighs no more than 5 kg, speaks, hears, sees, and relates to the environment. It has a voice synthesizer and two speakers. | two cameras, four microphones, nine touch sensors, two ultrasonic sensors, eight pressure sensors, an accelerometer, and a gyroscope | C, C++, Matlab, Java, Python, Urbi, Net, Choregraphe | Ethernet, Wi-Fi | University | Its visual and intuitive interface facilitates the content creation process, allowing for individualized teaching activities either on an individual basis or in small groups. | 12,300 EUR (H) |
| Beebot | Learning Resources | 6 [8,44,45,46,47,106] | Bee-shaped and mouse-shaped robots, respectively. | touch, sound, light | At the top, it has buttons for its programming. (Directional intuitive language via buttons) | USB | Kindergarten | They develop working memory, spatial awareness, and problem-solving ability. | 100 EUR (M) |
| e-puck | EPFL | 3 [107,108,109] | Small, Moving, Flexible. | sound, sight, proximity, accelerometer, 3 microphones, color camera | Built-in open-source software | Bluetooth | For all levels of education | Suitable for teaching signal processing, automatic control, distributed intelligent systems, position estimation, and finding a path for a moving robot. | 250 EUR (M) |
| mBot | Makeblock | 3 [8,49,110] | It is based on Arduino and is a small mobile robot, with many possible expansion options. | line detection, infrared | mBlock | Bluetooth, Wi-Fi | Large primary school classes | It enables children to get started in robotics, programming, and electronics. | 100 EUR (M) |
| Ozobot | University College for Teacher Education in Lower Austria | 2 [8,53] | Small moving sphere 2.5 cm wide. | color | Ozoblockly Programming with color codes | Primary education | A variety of games can be designed such as racetracks, puzzles, mazes, etc., to teach programming with a playful character. | 100 EUR (M) | |
| Cellulo | CHILI lab, EPFL | 2 [55,111] | It interacts with paper, is flexible, and is affordable. It has LED effects and it can move autonomously. | touch | QtQuick | Bluetooth | Elementary and high school | Various concepts that can be approached are atmospheric pressure, force, the Cartesian plane, and the motion of the planets, molecules, and atoms. | 125 EUR (M) |
| Otto DIY + | Homemade | 3 [59,112,113] | It is based on the Arduino platform and is designed with printable materials. It is scalable, modular, and flexible.It walks, dances and avoids obstacles. | ultrasound, touch | Arduino, Otto Blockly | USB Wi-Fi Bluetooth | Large primary school classes | Allows users to develop knowledge on various STEM topics. | 45 EUR (L) |
| FOSSbot | EELLAK, Harokopio University | 1 [66] | Printable, moving, and agile robot, speaks, writes with a marker, and is compatible with Lego bricks. Raspberry Pi. | distance, battery sensor, accelerometer, gyroscope, odometry sensor, infrared receiver, line detection, light | Python, Google Blockly | WI-FI | Primary and secondary education | Adapts to a variety of educational activities. | cost of materials 190 EUR (M) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kalaitzidou, M.; Pachidis, T.P. Recent Robots in STEAM Education. Educ. Sci. 2023, 13, 272. https://doi.org/10.3390/educsci13030272
Kalaitzidou M, Pachidis TP. Recent Robots in STEAM Education. Education Sciences. 2023; 13(3):272. https://doi.org/10.3390/educsci13030272
Chicago/Turabian StyleKalaitzidou, Magdalini, and Theodore P. Pachidis. 2023. "Recent Robots in STEAM Education" Education Sciences 13, no. 3: 272. https://doi.org/10.3390/educsci13030272
APA StyleKalaitzidou, M., & Pachidis, T. P. (2023). Recent Robots in STEAM Education. Education Sciences, 13(3), 272. https://doi.org/10.3390/educsci13030272