
Fostering Computational Thinking Skills: A Didactic Proposal for Elementary School Grades




Abstract
:1. Introduction
2. Computational Thinking
3. Didactic Sequence
3.1. Meet DOC
3.1.1. Challenge 1
3.1.2. Challenge 2
3.1.3. Sharing and Discussion
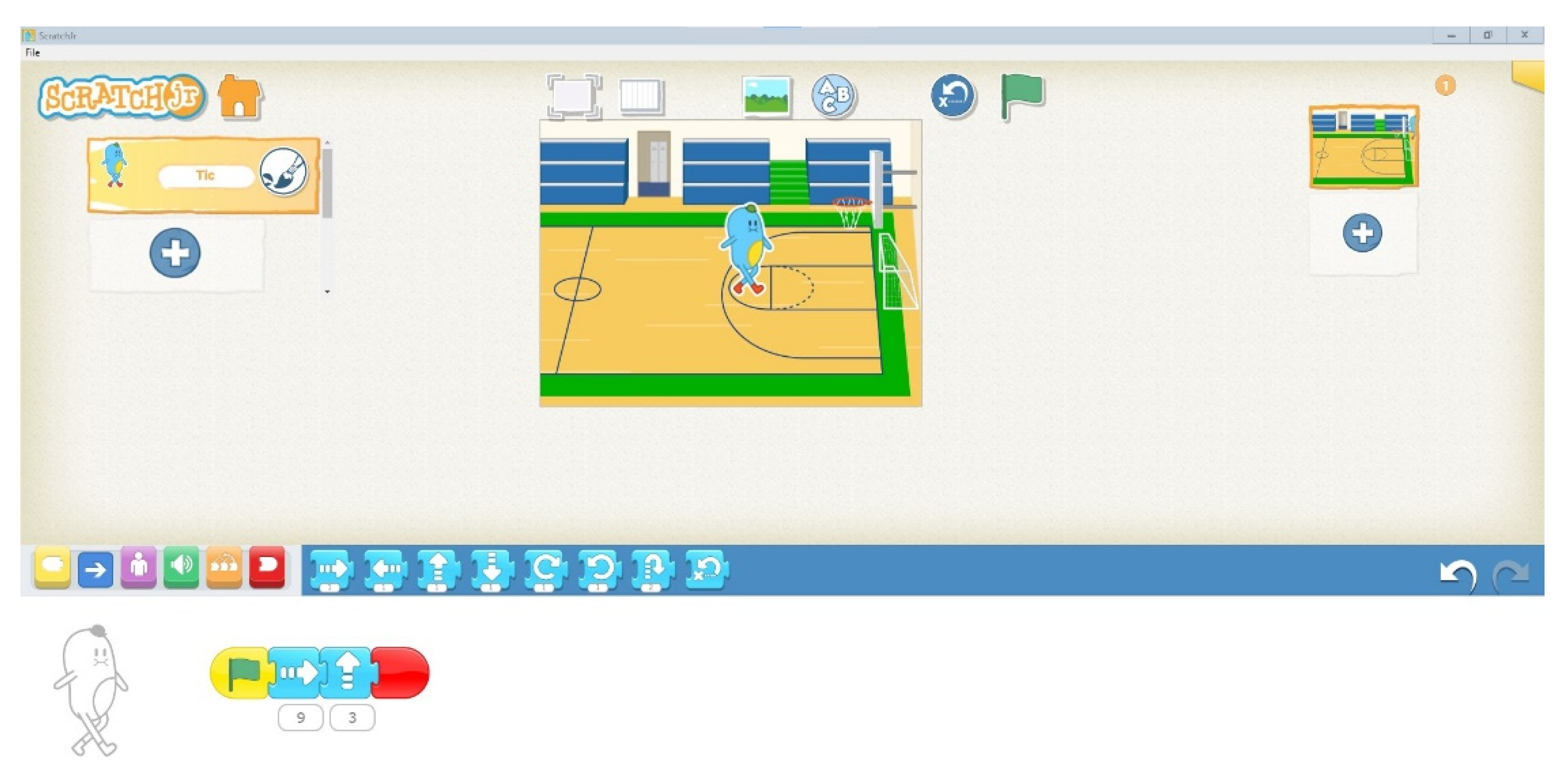
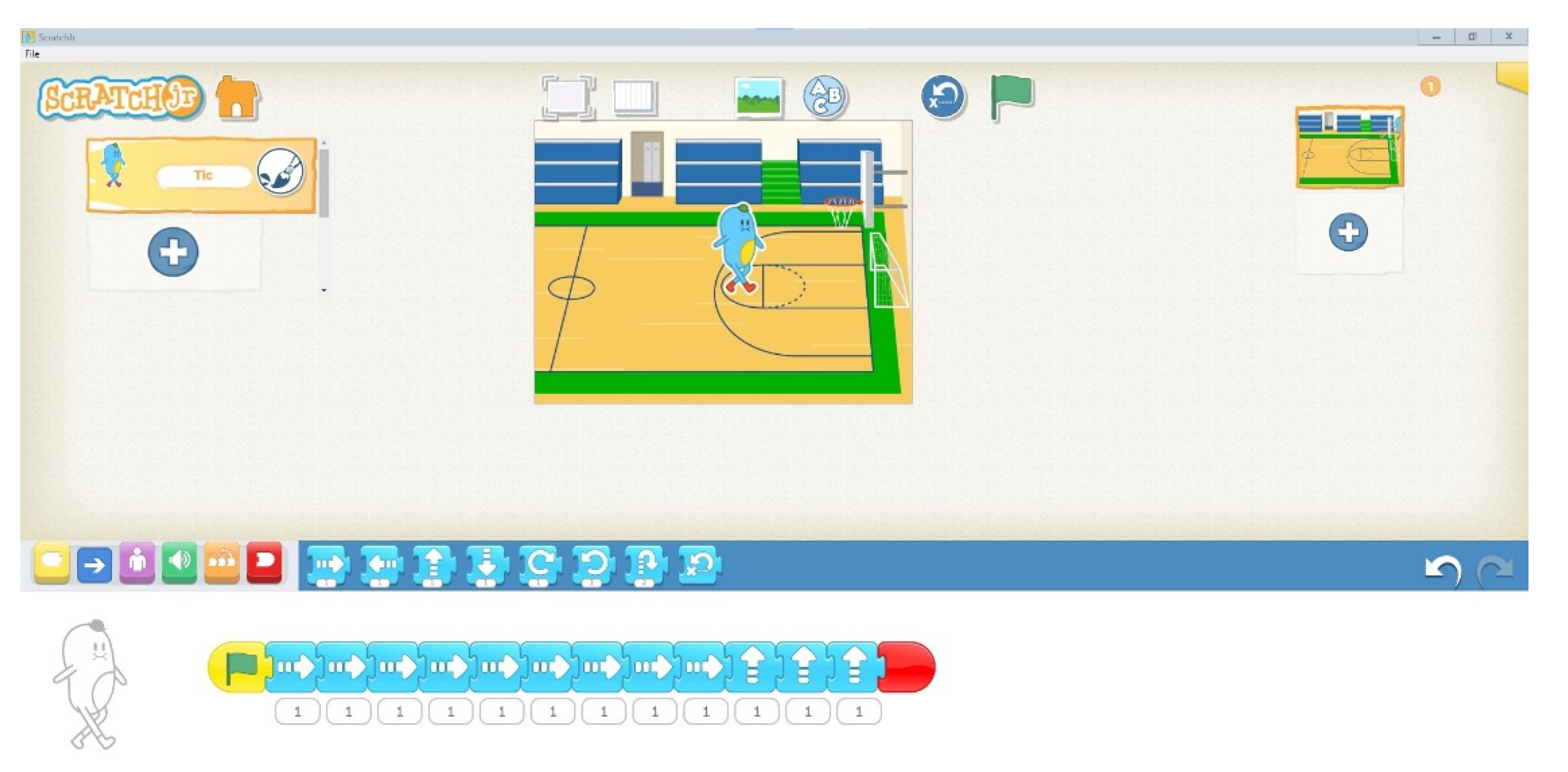
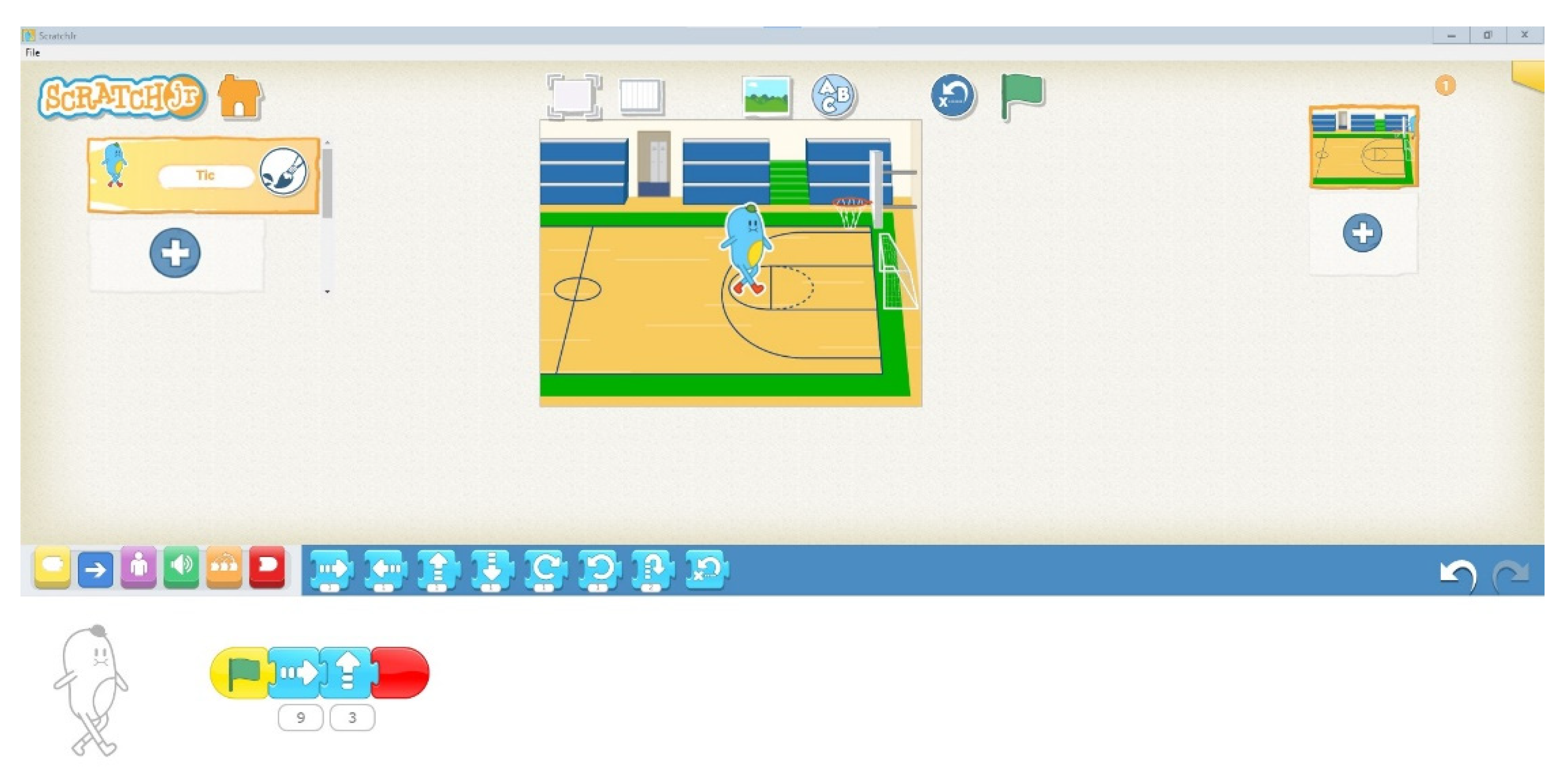
3.2. Free Throw Line
3.2.1. Challenge 1
3.2.2. Challenge 2
3.2.3. Sharing and Discussion
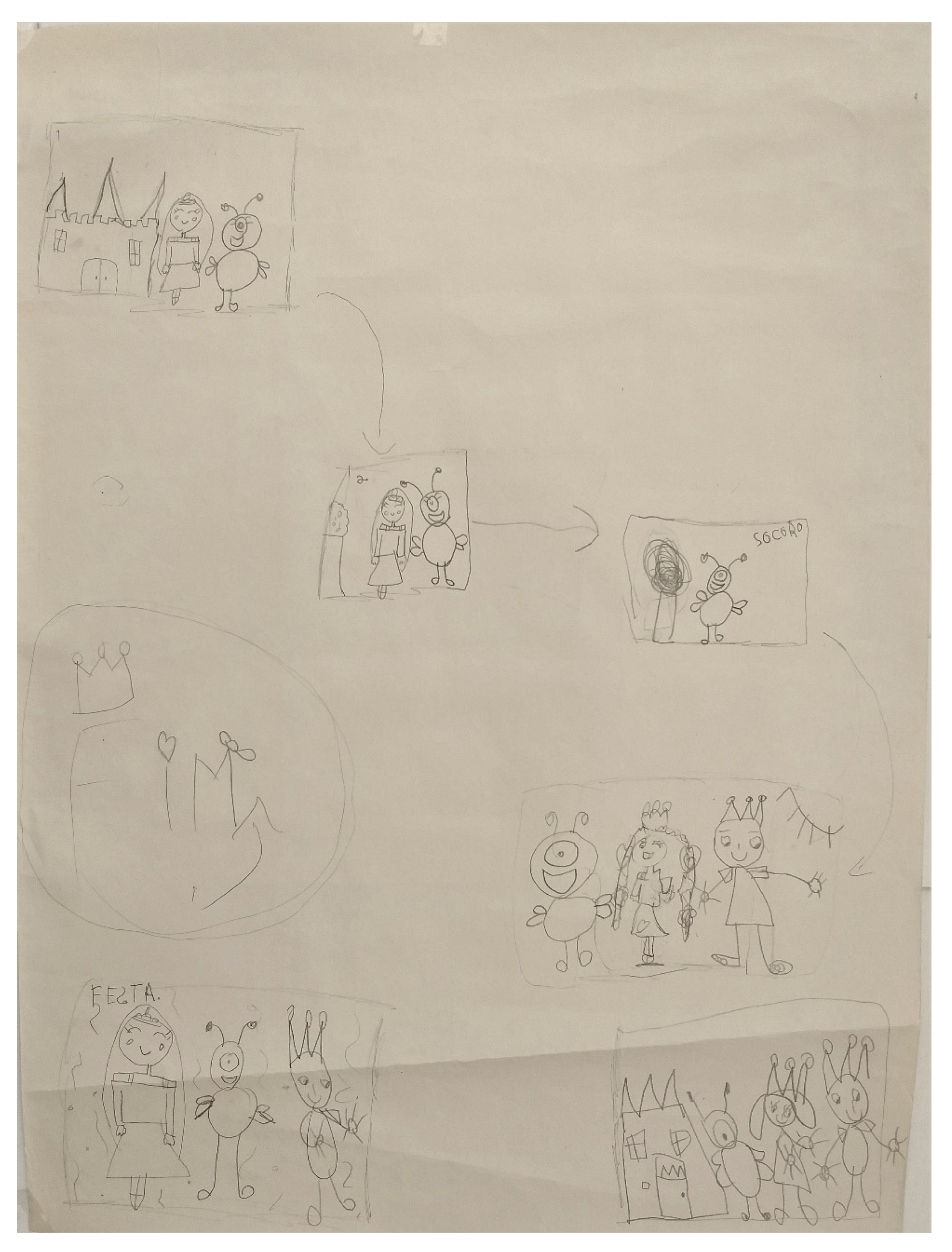
3.3. Tell Us a Story, DOC!
3.3.1. Challenge
3.3.2. Sharing and Discussion
4. Final Considerations
Author Contributions
Funding
Conflicts of Interest
References
- Organisation for Economic Co-Operation and Development. Education Policy Outlook 2019: Working Together to Help Students Achieve their Potential; OECD Publishing: Paris, France, 2019. [Google Scholar]
- Flores, M.A.; Gago, M. Teacher education in times of COVID-19 pandemic in Portugal: National, institutional and pedagogical responses. J. Educ. Teach. 2020, 46, 507–516. [Google Scholar] [CrossRef]
- Prensky, M. Digital Natives, Digital Immigrants Part 1. Horizon 2001, 9, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Paterson, R. The Power of EMPs: Educational Multimedia Projects. In Didactics of Smart Pedagogy; Springer: Cham, Switzerland, 2019; pp. 393–414. [Google Scholar]
- Mishra, P. Considering Contextual Knowledge: The TPACK Diagram Gets an Upgrade. J. Digit. Learn. Teach. Educ. 2019, 35, 76–78. [Google Scholar] [CrossRef] [Green Version]
- Binkley, M.; Erstad, O.; Herman, J.; Raizen, S.; Ripley, M.; Miller-Ricci, M.; Rumble, M. Defining twenty-first century skills. In Assessment and Teaching of 21st Century Skills; Griffin, P., McGraw, B., Care, E., Eds.; Springer: Dordrecht, The Netherlands, 2012; pp. 17–66. [Google Scholar] [CrossRef]
- Piedade, J.; Dorotea, N.; Pedro, A.; Matos, J.F. On Teaching Programming Fundamentals and Computational Thinking with Educational Robotics: A Didactic Experience with Pre-Service Teachers. Educ. Sci. 2020, 10, 214. [Google Scholar] [CrossRef]
- Soulé, H.; Warrick, T. Defining 21st century readiness for all students: What we know and how to get there. Psychol. Aesthet. Creat. Arts 2015, 9, 178–186. [Google Scholar] [CrossRef]
- INTEF. Digital Docente. 2017. Website: Aprendeintef. Available online: https://aprende.intef.es/sites/default/files/2018-05/2017_1020_Marco-Com%C3%BAn-de-Competencia-Digital-Docente.pdf (accessed on 17 August 2021).
- International Society for Technology in Education. ISTE Standards for Students: A Practical Guide for Learning with Technology; ISTE: Washington, DC, USA, 2017. [Google Scholar]
- Redecker, C. European Framework for the Digital Competence of Educators: DigCompEdu; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- Papert, S. Mindstorms Children, Computers, and Powerful Ideas, 2nd ed.; Basic Books, Inc.: New York, NY, USA, 1980; Volume 1. [Google Scholar]
- Freeman, A.; Becker, S.A.; Cummins, M. NMC/CoSN Horizon Report: 2017 K-12 Edition; The New Media Consortium: Austin, TX, USA, 2017. [Google Scholar]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Angeli, C.; Jaipal-Jamani, K. Preparing Pre-service Teachers to Promote Computational Thinking in School Classrooms. In Computational Thinking in the STEM Disciplines; Springer Science and Business Media LLC: New York, NY, USA, 2018; pp. 127–150. [Google Scholar]
- Luciano, A.P.G.; Fusinato, P.A.; Gomes, L.C.; Luciano, A.; Takai, H. The educational robotics and Arduino platform: Constructionist learning strategies to the teaching of physics. J. Phys. Conf. Ser. 2019, 1286, 012044. [Google Scholar] [CrossRef]
- Alimisis, D. Robotics in Education & Education in Robotics: Shifting Focus from Technology to Pedagogy. In Proceedings of the 3rd International Conference on Robotics in Education, Prague, Czech Republic, 13–15 September 2012; Charles University in Prague: Prague, Czech Republic, 2012; pp. 7–14. [Google Scholar]
- Kuhl, P.K.; Lim, S.-S.; Guerriero, S.; Van Damme, D. Developing Minds in the Digital Age; OECD Publishing: Paris, France, 2019. [Google Scholar]
- Zhong, B.; Xia, L. A Systematic Review on Exploring the Potential of Educational Robotics in Mathematics Education. Int. J. Sci. Math. Educ. 2018, 18, 79–101. [Google Scholar] [CrossRef]
- Atmatzidou, S.; Demetriadis, S. Advancing students’ computational thinking skills through educational robotics: A study on age and gender relevant differences. Robot. Auton. Syst. 2016, 75, 661–670. [Google Scholar] [CrossRef]
- Angarita, M.G.; Deco, C.; Collazos, C.C. Robotics Based Strategies to Support Computational Thinking: The Case of the Pascual Bravo Industrial Technical Institute. J. Comput. Sci. Technol. 2017, 17, 59–67. [Google Scholar]
- Chalmers, C. Robotics and computational thinking in primary school. Int. J. Child-Comput. Interact. 2018, 17, 93–100. [Google Scholar] [CrossRef] [Green Version]
- Angeli, C.; Voogt, J.; Fluck, A.; Webb, M.; Cox, M.; Malyn-Smith, J.; Zagami, J. A K-6 computational thinking curriculum framework: Implications for teacher knowledge. Educ. Technol. Soc. 2016, 19, 47–57. [Google Scholar]
- Conde, M.Á.; Rodríguez-Sedano, F.J.; Fernández-Llamas, C.; Gonçalves, J.; Lima, J.; García-Peñalvo, F.J. Fostering STEAM through challenge-based learning, robotics, and physical devices: A systematic mapping literature review. Comput. Appl. Eng. Educ. 2021, 29, 46–65. [Google Scholar] [CrossRef]
- Kim, C.; Yuan, J.; Gleasman, C.; Shin, M.; Hill, R.B. Preparing pre-service early childhood teachers to teach mathematics with robots. Comput. Collab. Learn. Conf. CSCL 2017, 2, 617–620. [Google Scholar]
- Muñoz, R.F.Z.; Alegría, J.A.H.; Collazos, C.A.; Fardoun, H. ChildProgramming evolution, a method to increase the computational thinking skills in school. Commun. Comput. Inf. Sci. 2019, 847, 57–69. [Google Scholar] [CrossRef]
- Zhang, L.; Nouri, J. A systematic review of learning computational thinking through Scratch in K-9. Comput. Educ. 2019, 141, 103607. [Google Scholar] [CrossRef]
- Matos, J.F. Princípios Orientadores Para o Design de Cenários de Aprendizagem; Instituto de Educação: Lisboa, Portugal, 2014.
- Pedro, A.; Piedade, J.; Matos, J.F.; Pedro, N. Redesigning initial teacher’s education practices with learning scenarios. Int. J. Inf. Learn. Technol. 2019, 36, 266–283. [Google Scholar] [CrossRef]
- Wing, J.M. Computational thinking. Commun. ACM 2006, 49, 33–35. [Google Scholar] [CrossRef]
- Hsu, T.-C.; Chang, S.-C.; Hung, Y.-T. How to learn and how to teach computational thinking: Suggestions based on a review of the literature. Comput. Educ. 2018, 126, 296–310. [Google Scholar] [CrossRef]
- Dede, C.; Mishra, P.; Voogt, J. Working Group 6: Advancing computational thinking in 21. Int. Summit ICT Educ. 2013, 1–6. Available online: https://ris.utwente.nl/ws/files/6168377/Advancing_computational_thinking_in_21st_century_learning.pdf (accessed on 14 July 2021).
- Brennan, K.; Resnick, M. New frameworks for studying and assessing the development of computational thinking. In Proceedings of the 2012 Annual Meeting of the American Educational Research Association, Vancouver, BC, Canada, 13–17 April 2012. [Google Scholar]
- National Research Council. Report of a Workshop on the Pedagogical Aspects of Computational Thinking; National Academies Press: Washington, DC, USA, 2011. [Google Scholar]
- Ramos, J.L.P.; Espadeiro, R.G. Iniciação à Programação no 1o Ciclo do Ensino Básico. Estudos de Avaliação. 2016. Available online: https://www.erte.dge.mec.pt/sites/default/files/estudos_avaliacao_ip1ceb.pdf (accessed on 14 July 2021).
- Associação Nacional de Professores de Informática. Linhas Orientadoras para a Robótica. DGE—Direção Geral de Educação. 2016. Website: DGE—Direção-Geral da Educação. Available online: https://www.erte.dge.mec.pt/sites/default/files/linhas_orientadoras_para_a_robotica.pdf (accessed on 12 July 2021).
- Dillenbourg, P. Introduction: What do you mean by ‘collaborative learning’? In Collaborative Learning: Cognitive and Computational Approaches; Elsevier: Oxford, UK, 1999. [Google Scholar]
- Chan, C.K.K. Co-regulation of learning in computer-supported collaborative learning environments: A discussion. Metacognition Learn. 2012, 7, 63–73. [Google Scholar] [CrossRef] [Green Version]
- Stahl, G.; Koschmann, T.; Suthers, D. Computer-supported collaborative learning: An historical perspective. In Cambridge Handbook of the Learning Sciences; Sawyer, R.K., Ed.; Cambridge University Press: Cambridge, UK, 2006; pp. 409–426. [Google Scholar]
- Alimisis, D. Teacher Training in Educational Robotics: The ROBOESL Project Paradigm. Technol. Knowl. Learn. 2019, 24, 279–290. [Google Scholar] [CrossRef]
- Jeong, H.; Hmelo-Silver, C.E. Seven Affordances of Computer-Supported Collaborative Learning: How to Support Collaborative Learning? How Can Technologies Help? Educ. Psychol. 2016, 51, 247–265. [Google Scholar] [CrossRef]
- Kucuk, S.; Sisman, B. Behavioral patterns of elementary students and teachers in one-to-one robotics instruction. Comput. Educ. 2017, 111, 31–43. [Google Scholar] [CrossRef]
- Soller, A.; Martínez, A.; Jermann, P.; Muehlenbrock, M. From mirroring to guiding: A review of state of the art technology for supporting collaborative learning. Int. J. Artif. Intell. Educ. 2005, 15, 261–290. [Google Scholar]
- Delgado, V.A.; Collazos, C.A.; Fardoun, H.M.; Safa, N. Collaboration Increase Through Monitoring and Evaluation Mechanisms of the Collaborative Learning Process. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Meiselwitz, G., Ed.; Springer: Cham, Switzerland, 2017; Volume 10283, pp. 20–31. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CT Skills | Description | Student Skills (The Student Should Be Able to. . .) |
|---|---|---|
| Abstraction | Abstraction is the process of creating something simple from something complicated, by leaving out the irrelevant details, finding the relevant patterns, and separating ideas from tangible details. | 1. Separate the important from the redundant information. 2. Analyse and specify common behaviours or programming structures between different scripts. 3. Identify abstractions between different programming environments. |
| Generalisation | Generalisation is transferring a problem-solving process to a wide variety of problems. | Expand an existing solution to a given problem to cover more possibilities/cases. |
| Algorithm | Algorithm is a practice of writing step-by-step specific and explicit instructions for carrying out a process. | 1. Explicitly state the algorithm steps. 2. Identify different effective algorithms for a given problem. 3. Find the most efficient algorithm. |
| Modularity | Modularity is the development of autonomous processes that encapsulate a set of often used commands performing a specific function that might be used in the same or different problems | Develop autonomous code sections for use in the same or different problems. |
| Decomposition | Decomposition is the process of breaking down problems into smaller parts that may be more easily solved. | Break down a problem into smaller/simpler parts that are easier to manage. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silva, R.; Fonseca, B.; Costa, C.; Martins, F. Fostering Computational Thinking Skills: A Didactic Proposal for Elementary School Grades. Educ. Sci. 2021, 11, 518. https://doi.org/10.3390/educsci11090518
Silva R, Fonseca B, Costa C, Martins F. Fostering Computational Thinking Skills: A Didactic Proposal for Elementary School Grades. Education Sciences. 2021; 11(9):518. https://doi.org/10.3390/educsci11090518
Chicago/Turabian StyleSilva, Ricardo, Benjamim Fonseca, Cecília Costa, and Fernando Martins. 2021. "Fostering Computational Thinking Skills: A Didactic Proposal for Elementary School Grades" Education Sciences 11, no. 9: 518. https://doi.org/10.3390/educsci11090518
APA StyleSilva, R., Fonseca, B., Costa, C., & Martins, F. (2021). Fostering Computational Thinking Skills: A Didactic Proposal for Elementary School Grades. Education Sciences, 11(9), 518. https://doi.org/10.3390/educsci11090518