Abstract
Finding context, examples, and ample hands-on experimentation is fundamental for understanding complex ideas in subjects such as science and math. Recent popularity of competitive robotics has become a catalyst in the development of DIY and hobby kits. Manufacturers have made available easy to work, re-configurable, and functional, structural elements as well as control electronics. Additionally, extensive participation from the open-source software community is providing cutting edge and effective software. Despite all the right ingredients, competitive robotics continues to be unregulated and non-standardized. Additionally, in absence of regulations and standards, the organizers, suppliers, educators, and participants are left to their own means and resources that necessarily may not align with systematic learning. The cost of approved competitive kits as well as field kits becomes inhibitive for students from poorer communities. This paper surveys a wide range of competitive robotics avenues available to school-age students. A survey with various stake holders including participants, mentors, referees, and organizers is done and findings are included. A path for standardizing competitive robotics within the framework of the World Robotics League is found to be an effective tool to train the students. A description of the World Robotics League framework and initial findings are reported.
1. Introduction
According to the international federation of robotics, robots refer to systems that are multifunctional, reconfigurable, and reprogrammable [1]. The design, building, and operation of the robots therefore requires a varied range of skills. Various aspects of robotics therefore become an instrument for experiments in logical thinking, programming, and principles of math and physics. To list a few examples:
- Correlation between the motor rotation, mobile robot wheel diameter, and total distance covered.
- A kinematic chain, simple machines, and torque to force relationship when lifting objects with the robot arm.
- Robot navigation, movement between points, finding the shortest path between two points, and manipulating robot wheels for straight motion, turn, and error correction.
- Understanding the principle of center of gravity when the robot climbs on an incline and decline.
- Acceleration, deceleration, velocity, and displacement relationships to ensure robot travels between two points accurately and in minimal time.
In their research, Ardito et al. and Sana et al. [2,3] demonstrate effective use of robots to teach complex ideas in geometry such as ratios, estimation, and geometry but also finding real life relevance to classroom learning. In their article, Amico, Guastell, and Chella [4] suggest that when using robots for learning, students exhibit better understanding of concepts and higher participation in various topics in physics.
Consequently, many educators, parents, and self-motivated individuals participate in various robotics competitive leagues [5,6,7].
Application of the robots subdivide them into mobile and non-mobile robots [6,7]. The kinematic control of the robot further classifies it as autonomous or a teleoperated system. However, within competitive robotics most of the challenges are based on mobile robots. At the start of the game, the robot is placed in what is referred to as robot base. During the game, the robot travels to different part of the robot field and completes a variety of tasks. The tasks may include pushing, pulling, moving objects, actuating mechanisms, etc. The robot game is usually time bound. The scores assigned are based on total tasks performed within specified challenge duration. In case any exceptions are made, a penalty is assigned. The penalty may negatively impact the total score. In many other competitions, such as robo-soccer, sumo-robots, or one-robot events, multiple robots compete as opponents and the scores are determined not only by the robot’s direct accomplishment but also by inhibiting the opponent. Contrary to expectations, most of the competitions require running the robot in teleoperated mode. Using robots in an autonomous fashion is extremely limited.
2. Studies and Findings in Education and Robotics
Availability of many cost-effective kits and the initiatives of many public and private agencies has made robotics very popular within schools. With the potential to offer many learning-by-doing opportunities, competitive robotics has found wide-range acceptance. In a survey of 147 recently published studies [5], it was found that there are a variety of ways in which students can benefit from robotics program, including (1) understanding of abstract concepts, (2) a platform for feedback-oriented learning, (3) establishing collaboration with peers, and (4) opportunities to explore and find deeper insight into real world problem.
Unlike other disciplines, where levels, curricula, and path to progression are well established, robotics curricula still lack a universally agreed approach. The lack of a systematic and accepted curriculum lends itself to many participants exploring various competitive robotics avenues as a method to learn robotics. While there is much enthusiasm in participating in competitive robotics; a mix of challenges given to unprepared students and coaches limit the learning opportunities. To understand the unique combination of robotics as a highly technical endeavor and an effective medium for experimenting ideas in science, math, and logic, a range of literature was referred to. The body of literature includes fundamental education psychology, state of the art in competitive robotics and leagues, technical aspects, and the role of sports elements due to its consonance with competitive elements. In a thorough study of various robotics education initiatives across Europe [4], authors identify strong disconnect in various competitive robotics avenues. The competitive robotics are limited in scope due to vendor-specific products such as SICK and FESTO and technology or inherent product promotion in First Lego League and VEX competitions that restricts usage of only standard Lego and Lego technic products or VEX products. The study also focuses on synchronization of various competitive robotics avenues to prevent reinvention and a more systematic approach. Additionally, various competitive approaches such as Robocup, etc. enable enormous creativity but do not have a coherent approach, and hence prevent a serious evaluation, comparison, and quantification of the outcome.
Mark et al. [8] emphasize educational goals to align with the intellectual level of students. They propose a systematic step by step approach to learning and progress. For the student’s engagement to be fruitful, it is extremely important that the robot navigation and process planning are broken into multiple steps. A hierarchical approach of breaking a complex problem into sub-tasks is the cornerstone of successful completion. Ample opportunity must be given to the students to familiarize themselves with each component of robotics [9]. A constructivist approach of teaching and learning [10] is fundamental for effective education. Organized and multi-stage participation and assignments offered in meaningful context are crucial. Sequential task presentation enables a gradual development in thinking and skill/knowledge cultivation at every stage.
In one of the widely used texts on educational psychology [11], authors emphasize education and learning to have self-regulated process experience with opportunities to resolve cognitive conflicts with concrete experience, engagement, and self-assessment.
Pretty much all the studies reported so far consider a point of view that aligns with classroom environments. Given the nature of competitive robotics in having similarity to sports, it is very important to take into consideration the impact of sports in psychological and intellectual development and observe certain aspects of competitive robotics in the context of sports. For an individual, participation in sports provides an opportunity for a very objective evaluation, introspection, and application of skills in many ways. Sports has also shown a positive impact on skills such as coordination, quick introspect and improvement, attention, and planning [12,13]. Competitive robotics when executed within tenets of sports can have a very positive impact on a child’s intellectual development. In a study of adults [13] who had socially vulnerable childhoods, it was found that (1) sports provided a valuable avenue to disconnect from other domains of day-to-day life while receiving support, appreciation, and feedback; (2) a venue to self-reflect and find insights about themselves; and (3) sport can become a valuable instrument to reach goals. In another study [14], it is suggested that visibility of skills, engagement in challenges, and confidence translate into an overall positive and fruitful experience in sports. The role of a competent coach is cornerstone of the overall impact.
In the findings within the educational psychology community as well as sports and competitive robotics, what stands out is the need for:
- A systematic, step by step approach;
- Ample opportunity to experiment and for self-introspection; and
- Well-trained coaches.
2.1. Hypothesis
As educators and participants, we undertook an extensive effort to understand various avenues available for the students to use competitive robotics as an instrument of learning and exploring. To that end, we reached out to various schools, educators, coaches, and participants to understand their methodology. We quickly recognized that robotics learning must:
- Be based on systematic multi-stage participation and offer technical challenges in a meaningful context. Present tasks in a sequential manner enabling a gradual development in thinking and skill/knowledge cultivation at every stage.
- Quantify progression and advancement by participant skill, technical merit, and provable excellence, and provide ample opportunities for self-evaluation.
- Minimize the sizes to enable fruitful engagement such that each participant learns and explores a wide range of topics within design and critical thinking.
- Recognize the contribution of volunteers and educators; however, ensure that coaches are qualified and have enough subject matter understanding to be able to guide the participants.
- To ensure that robotics continues to have a wide-reaching impact, identify and use cost-effective building and programming platforms, structural elements, and robot field elements.
This paper is a compilation of a research survey and studies performed by a group of participants and coaches within North Texas, State of Washington and California. The group has been participating in various competitive robotics events and has excelled through various levels of progression including world championships across multiple years. The group has been recognized for its technical excellence, as well as for outreach and engagement to further the cause of STEM education in general and robotics in particular. The curriculum proposed by the group has been included in one of the popular references for competitive robotics [14,15].
In engagement with communities as well as educators across the world, it was quickly identified that the cost of entry for most of the teams limits their ability to be able to learn and explore. While many costs effective and easy-to-use resources are available, stringent requirements and vendor increase the cost of entry. What financially makes it difficult for the teams to enter the competitive leagues is the inability to reuse many of the items and resources. Every year teams must invest significant money for the competitive field that cannot be reused. A path to overcome the same is suggested in later sections.
2.2. A Platform for Implementing and Testing the Findings
Many of the findings have been successfully implemented, tested, and demonstrated in the framework of World Robotics League (WRL). WRL follows a systematic approach to learning and provides opportunity for independent attempts via matching challenges to skills learnt. Skill imparting and subsequent challenge offering happen in quick succession. The challenges require experimenting with an idea/skill in more than one way. WRL allows the classic learning and improving based on systematic, multi-stage, constructive introspection, organized, and multi-stage participation attempts in a meaningful context and sequential task presentation hence enabling a gradual development in thinking and skill/knowledge cultivation.
In the subsequent sections, we summarize the competition format as well as details of various competitive avenues. A survey of cost-effective kits is included as well. A mechanism for reusability and benefitting the poorer communities and educators is included.
3. Survey of Competitive Robotics Avenues and State of Art
3.1. WRO
The World Robot Olympiad (WRO) game has four different categories: Regular, Open, Football, and ARC. Teams participating in Regular and Football categories are required to use elements from “LEGO® MINDSTORMS® sets (NXT or EV3). Only LEGO branded elements may be used to construct the remaining parts of the robot [13]”. The only third-party element that the regular category participants can use is the HiTechnic Color Sensor. The Football Category participants need “HiTechnic infrared ball and can use the HiTechnic infrared and compass sensors [16]”. The other two categories do not have any restrictions on the hardware.
In the ARC category, the robot can be built using any type of hardware kits and any material. Teams can use 3D printed elements, elements prepared with a CNC machine, elements cut from acryl/wood/metal, or any elements from any material. There are no restrictions about the use and brand of sensors, batteries, or electrical motors and servos [16]. Teams participating in the Open Category have no restriction on balance between LEGO elements and other materials. There is no restriction on the use of controllers.
3.2. FLL
FLL, the FIRST Lego League challenge, is organized by FIRST for elementary and middle school students (ages 9–14 in the United States and Canada and ages 9–16 in the rest of the world) [17]. The challenge has multiple parts including research, core values, design, and robotic challenge. The robotics part of the competition involves designing and programming LEGO Mindstorms, NXT, and SPIKE Prime robots to complete tasks. Any Lego technic items can be used to customize the robots. The competition includes many challenges based on the year’s theme.
3.3. FTC
FIRST Tech Challenge (FTC) is a competition that allows teams to design, build, and code robots to compete “in a head-to-head challenge in an alliance format [18]”. Robots can be made with specified list of items also called FTC legal. Additionally, custom built, machined and 3D printed parts can be used. The robot can be coded using various levels of Java-based programming. Teams learn to raise funds and market their team to help design and build the robots.
The robot is required to stay within the dimensions of 18 × 18 × 18 inches and under the weight of 42 pounds. The match begins with a 30 s autonomous period, then, there is a 2-min driver-controlled period.
3.4. FRC
The First Robotics Challenge (FRC) robots are built using whatever parts are needed with restrictions on hazardous substances [19]. They can weigh up to 125 lbs. Challenges are released annually, and teams have six weeks to build a robot capable of competing.
The challenges are normally a version of pick-and-place. In the last several years, the main tasks have been shooting balls into targets, lifting the robot above the ground, and depositing game elements into specific locations. There is a 15 s autonomous period followed by a 2 min and 15 s teleoperated period.
The main emphasis in the game is speed and efficiency. Most of the parts on an FRC robot are custom-designed and manufactured to provide flexibility in design.
3.5. BEST
The BEST robotics competition [20] is for high schoolers and middle schoolers. The BEST robotic competition is split into three regions, which consist of Denver, Texas, and the Southern Region. While these regions are split, they all follow the same guideline for BEST. Furthermore, the BEST robotics competition comprises three main components for the competition, which include the robot, engineering notebook, and the booth/marketing. BEST robotics provides the materials for the competition annually. These parts include wood, PVC, DC motors, VEX Hub, wires, motor drivers, and other parts. These parts may vary each year, depending on the rules of the competition. However, the participants can use 3D printed parts.
3.6. WRL
The World Robotics League (WRL) [21] is an outcome of the effort to provide the participants a platform that enables systematic learning, experimentation, constructive introspection, organized, and multi-stage participation attempts in a meaningful context. While primary insistence is on technical excellence, the framework provides a quantifiable approach to assess collaboration, teamwork, etc.
WRL is offered at three levels—Apprentice, Craftsman, and Master. Within each level, there is gradual progression from entry level to expert level. Smaller challenges are offered throughout the year at regular intervals, about once a month. Team sizes are flexible such that the participants can engage in a meaningful way to learn and contribute. Each challenge aligns with a specific skill. The initial set of challenges also referred to as the qualifying challenges, prepare the students with fundamental skills. The qualification process, instead of relative evaluation, is based on evaluation for various skills. Following the qualification, students participate in much larger complex challenges, that require a higher order of design, programming, and process planning.
Some of the other attributes of the WRL include platform agnostics. That is, any programming as well as structural elements can be used to participate. Students can use off-the-shelf parts or design, build, and purpose parts such as wood, PVC pipes, 3D-printed parts, etc. By not tying the competition to a supplier, the poor students and teams have an opportunity to be able to participate, learn, and collaborate. Additionally, the competition becoming the primary driver, equipment suppliers work to offer cost effective and easy to work platforms.
3.7. RAD
In partnership with “For the Win” robotics, REC Foundation Aerial Drones (RAD) [22] offers middle and high school students an opportunity to “safely operate a drone, work as a team, and research workforce applications of aerial robotic technology.” RAD hosts two different drone competitions: drone racing and package delivery. In drone racing, the object of the game is to navigate a racecourse in a head-to-head race against an opponent. In package delivery, the object of the game is to navigate a racecourse, deliver a payload accurately, and return to the starting point as quickly as possible.
The competition allows teams to build their own drone and allows the use of 3D printing and CAD. This competition includes multiple programming language options, such as JavaScript, Python, MATLAB, and more.
3.8. RoboSub
RoboSub is an international competition in which teams from around the world design and build robotic submarines. The goal of this competition is to demonstrate the autonomy of an autonomous underwater vehicle (AUV) [23] by completing tasks underwater, with the theme changing each year. Students assemble teams and design and build their AUV while testing sub-systems. Then, they put their subsystems together to complete a series of autonomous tasks. This competition provides an opportunity for students to experience systems engineering while accomplishing realistic missions. Teams must create a journal paper that describes the design of the vehicle and the reasoning or process behind that design choice. Along with that, teams must also submit a video that will introduce the team and their approach to the challenge. Each team member must provide a resume that will be circulated to sponsors and employers who will consider them for employment, internships, and co-op programs.
3.9. NRL
The National Robotics League (NRL) is a development program of the National Tooling and Machining Association (NTMA) and the National Tooling and Machining Foundation (NTMF) [24]. The National Robotics League is a project-based STEM program that teaches students about the manufacturing process and technical skills needed for designing a 15-lb robot to battle in a “gladiator-style competition”. NRL’s vision is for students all over the nation to consider manufacturing as a possible career option. It is highly encouraged for teams to build and design new bots. Bots are made from all kinds of materials, and 3D printed parts could be a good choice in designing and building the chassis of the robot.
In the game, 15 lb robots fight each other in a 3-min period of time or until one of the bots is knocked out or taps out.
This competition is not autonomous and includes radio controllers or Bluetooth systems.
3.10. National Robotics Challenge
The National Robotics Challenge is the oldest robotics competition starting in 1986. It contains 12 challenges for students from elementary to post-secondary with a focus on combat robotics [25]. There are three weight classes for robots to fit in: Beetle weight, Beetle weight—Plastic Class, and Ant weight. Weight classes range from 1 to 6 lbs. There are specific subcategories for wheeled and non-wheeled robots. Robots in any class apart from Plastic Class can use any materials they want. Robots can be controlled autonomously or semi-autonomously. Pneumatics, hydraulics, flywheels, and springs are legal to use in competition.
Combat robotics is similar to Battlebots, and the same design strategies scaled-down are often most favorable. Robots with a low center of mass and a high amount of power (force × velocity) are often able to push their opponents out of the ring without any problems. In addition, robots that can drive on their backs are also at an advantage if they get flipped over.
3.11. National Underwater Robotics Challenge
The National Underwater Robotics Challenge (NURC) is an annual underwater robotics competition based in Arizona [26]. The challenge is to create a remotely operated underwater vehicle (ROV) that is tethered to the surface and manually controlled through underwater camera telemetry. The ROV is meant to have a multitude of specialized end-effectors to complete several different tasks in a time span of twenty minutes. ROVs are not constrained by size or materials; however, they have to be less than 100 lbs.
One of the biggest challenges in NURC is the mobility of the ROV. In contrast to other robotics competitions where robots are bound in the plane, ROVs have to be able to traverse a three-dimensional space. In addition, the game field is not specifically provided to teams for their practice; instead, it is unveiled at the competition.
Two major constraints on ROVs are that they can only weigh up to [26] 100 lbs and be powered by a 50 V power supply.
The tasks assigned to ROVs are a variation of typical pick-and-place.
3.12. RoboCup Junior (RCJ)
RoboCup Junior (RCJ), offered as a division of RoboCup, is available to primary and secondary school aged children [27]. The robots compete in one of three main leagues: Soccer, Rescue, or Dance. In Rescue, robots identify victims within re-created disaster scenarios, varying in complexity from line-following on a flat surface to negotiating paths through obstacles on uneven terrain. In Soccer, 2-on-2 teams of autonomous mobile robots play in a highly dynamic environment, tracking a special light-emitting ball in an enclosed, land-marked field. In Onstage, one or more robots come together with humans, dressed in costume and moving in creative, interactive, and collaborative ways.
3.13. VEX Robotics
VEX robotics is a robotics competition for elementary through university students that is a subset of the Innovation First International organization [28]. Robotics Education and Competition Foundation organizes the VEX robotics competition. The VEX robotics competitions are organized in three divisions distributed per age. VEX EDR is for middle and high school students, VEX AI is for high school students. VEX IQ is for elementary and middle school students only. The competitive season is yearly. A challenge is announced annually and the participants design, build, program, and drive in part autonomous and part teleoperated mode.
3.14. Robo-One
The Robo-One competition is based on bipedal humanoid robots. The competition includes an autonomous stage, followed by one-on-one matches [29]. The robots are built with RC Servos and structural pieces. Under the umbrella of Robo-One, multiple challenges are offered based on K-1 boxing where robots try to knock their opponent down, or out of the ring. Events include (1) ROBO-ONE, (2) ROBO-ONE Junior (3) ROBO-ONE Special: a set of “special” challenges including a timed dash, a ball toss, climbing a set of stairs, opening a door, and an obstacle course are attempted; (4) ROBO-ONE Grand Prix; (5) ROBO-ONE Soccer; and (6) ROBO-ONE auto based on autonomous biped robot fight tournament.
3.15. Micromouse
In the micromouse competition, a small autonomous mobile robot solves a maze that is made up of a 16 × 16 grid of cells with each square 180 mm and walls are 50 mm high [30]. The robots must find their way from a predetermined starting position to the central area of the maze in autonomous manner. The robot tracks it position, identifies walls as it traverses, maps the maze, then detects when it has reached the goal and performs additional searches of the maze until it has found an optimal route. Once path is determined, the robot should travel in shortest time taken. Various search algorithms that are popular in micromouse competitions include Dijkstra’s algorithm, Bellman flood-fill method, A* search algorithm, tree traversal algorithms, and various graph traversal algorithms.
3.16. Botball
Botball is a league mostly popular within United States with recent limited participation by teams from other parts of the world [31]. The Botball is based on specified competition-approved kits and robots complete challenges in an autonomous fashion. The robot uses various sensors and cameras to complete a range of tasks. The challenge is offered annually.
In the survey of various competitive robotics avenues, we find that the majority of the competitions fail to provide a structured, step-by-step approach to learning and experimenting. That is, across a season, a challenge is announced and then the team needs to start preparing for competition. One choice that participants quite often face is the skills to learn (Figure 1). That is, the learning gets heavily skewed by the challenge at hand. Given the limited duration to learn, build, test, and iterate, the larger scope of learning and exploring is compromised. Robotics at the pre-college level can be used to connect classroom skills to the real world. However, connections between classroom learning and practical application are not properly exploited, leading to missed learning and growth opportunities and driving teams to ignore the science of robotics and just focus on “making it work”.
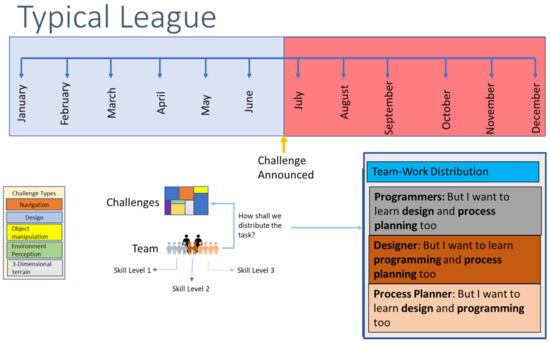
Figure 1.
Participation and progression in exiting leagues.
4. Engagement and Discussions with Stakeholders
In order to understand the impact of competitive robotics avenues, this research aimed at reaching out to various stakeholders. The group included organizer groups, the referees and judges who are perceived as the subject matter experts, the coaches and educators who identify competitive robotics as an effective learning tool, and the participants who are directly involved in learning process. Additionally, the input from parents was included to assess their expectations and final outcome as perceived by them. Since most of the competitive robotics are organized and coordinated by volunteers and have no set structure, the data also provided an insight into the impact of means and methods. The survey was conducted amongst participants (85), judges (15), coaches (27), and parents (32). Questions that were asked include:
- a.
- Which competitive robotics league(s) did you participate in?Response: FTC (15), WRL (25), WRO (5), BEST (7), VEX-EDR (20), FLL (62)
- b.
- Did you have enough resources to guide and train your team? If so, what are your references.Findings summary:Programming examples are provided by many equipment suppliers; however, for design and strategy, there are very limited resources. Any training material available are discussed in the context of the kit provided by the suppliers and manufacturers; therefore, the usage and application become extremely limited. Most of the time, it is the knowledge and subject matter expertise of well-trained mentors that serves as best reference. Teams that have well-trained mentors or mentors having industrial automation background can provide better context and effective guidance.
- c.
- Do you find the accessory events such as fundraising, team building, outreach aligning with learning opportunities or a deterrent?Findings summary:While certain students (15%) are naturally aligned to organizing and enjoy accessory activities, most of the teams (85%) find imposition of such activities extremely confusing and unnecessarily distracting. The engagement of members in core technical activities such as design, programing, prototyping, and testing provides adequate opportunity for team building and coordination.
- d.
- Did your team participate in a systematic training process or learnt as needed during the robotics competition? Where did you stand within the competing leagues?Findings summary:27% of the participating teams followed an organization lead systematic training such as private centers, coach-led activities, and schools. The same manifested in their advancements and excellence in various competitions. Of all the teams that advanced and were recognized for excellence, 85% or more participated in some form of systematic training.
- e.
- On a scale of 1–10, how will you grade competitive robotics in providing the real-life perspective to skills learnt?9–10 (85%), 6–8 (10%), 3–6 (5%)
- f.
- If you participated in in a competition that recognizes accessory activities such as fundraising and community outreach, was your advancement and recognition consistent through the season?Findings summary:Provided that the judges are untrained volunteers, the recognition and judging is heavily skewed by the quality of judges. There are no clear indicators for recognition or penalizing (85%). For example, despite consistent design and programming strategies, the team may be recognized for technical excellence in qualifiers but penalized in semi-finals then again recognized in regionals.
- g.
- Was motivation and contribution from all participants uniform across the skills?Yes 37%, no 63%. Findings summary: Many members, through previous training or additional support could excel within the team. With the progression of the season, the opportunity for less prepared participants to be able to contribute or participate in core technical activities continued to reduce. The students disadvantaged due to inadequate technical training were willingly or unwillingly pushed to accessory activities such as marketing, outreach, and bookkeeping.
- h.
- On a scale of 1–10, to what degree does participation in robotics competitions enhance your technical knowledge in the field of STEM?9–10 (77%), 6–8 (20%), 3–6 (3%)
- i.
- On a scale of 1–10, what was the assessment of technical excellence across majority types of teams—family supported, volunteer supported (such as religious and community), public schools, private schools?7–10 (family-supported), 5–7 (private schools), (3–5) public schools, (1–3) volunteer-supported
5. A Summary of Key Conclusions Based on Discussions with Participants, Mentors, and Organizers
5.1. Team Size
In our engagement and interaction with the participants, mentors, and organizers, multiple notable issues stood out. Given that the cost of entry is very steep, the competitions encourage large teams. One of the undesirable impacts of large team setting and working in a large challenge mode is limited learning and focus on advancement. Participants, who, based on previous experience or better training have upper hand, take over majority of design and development effort; whereas the students who are at beginner or at entry level despite their aptitude and willingness to learn are not able to get enough time to catch up and be a productive member within the team.
5.2. Fair Opportunity
Many other teams, that try to stay fair in terms of giving equal contributing and learning opportunity to all the participants and inclusion, face the dilemma of overruling novel ideas and programming ideas if most of such ideas are proposed by one or two individuals. The competitive events must ensure that engagement by all participants is fruitful. In various leagues, those entering the teams and competition find a suitable platform to learn and advance, those who are gifted are not challenged adequately.
5.3. Task Distribution
Quite often, the participants as well as coaches find themselves in very difficult position about what order the challenges should be approached; how to distribute the task; how to ensure that each participant gets enough opportunity to learn and explore different aspects of robots including design, programming, process planning. Should the task be distributed based on (1) specific skill such as organizing, programing, designing, etc., or (2) should the task be distributed such that all participants attempt all the skills and hence get enough opportunity to learn all the skills. With the goal to advance through competitions, compounded by limited time, teams continue to learn in the context of the challenge of the season.
5.4. Impact on Task Overlap
Typically, robot task accomplishment requires an iterative design and complementing program to actuate the end effector and/or move the robot precisely to a position to engage with the field objects. The process to perfection is iterative, where the participants need to build and reprogram, then test and repeat the cycle multiple times before a repeatable and accurate system is built. By increasing many participants and dividing the task between designer and programmer, the lead time becomes longer. Usually, scaling the teams based on the size and complexity of challenges ensures that every participant gets to design, program, and test a system.
5.5. Accessory Activities
Robotics competitions are organized to promote STEM; however, they often embody a wide variety of participation and advancement criteria that are not engineering-based. They are also exceedingly expensive. These include core values in FLL, Inspire, Connect and Motivate Awards in FTC, Energy and Sportsmanship Awards in VEX. While robotics events are evaluated quantifiably and are verifiable, the rest of the components are very subjective, and opinion-based.
5.6. Judging Quality
What further complicates the problem is that the judges and referees are volunteers. There is no certification or qualifications process for the technical or subject matter knowledge of the judges. Certain venues that are able to attract well trained and knowledgeable coaches and referees have shown a better outcome.
5.7. Coach Engagement
By design, the competitive leagues cannot prevent the coaches and parents’ participation beyond basic guidance. The level of engagement from the coaches in programming and design is extremely varied. Many participating teams have coaches and mentors do some programming and design.
5.8. Mentorship
Even if sufficient monetary resources are available, another major problem that arises is leadership and mentorship. Many students joining the school level or community teams may not have prior experience in applied engineering. Willing mentors and volunteers typically struggle in the beginning because of the lack of any exclusive training and experience in the fields directly applicable to robotics. Unless highly driven and motivated, most mentors and teachers will leave students to “figure it out”, leaving them to struggle and eventually give up. Teachers also have no structured curriculum upon which to base their syllabus and eventually just resort to “finishing what we were doing last time”. In contrast however, if the curriculum was rigidly based upon principles connecting the applications of science and math, students could take a more scientific and logical approach to robotics.
5.9. Progression and Continued Learning
Within each league, across multiple seasons of participation, the skill requirements are about the same. A participant may improve the performance with experience; however, the design and programming fundamentals stay the same. As far as learning is concerned, a participant learns most in the first year; however, in following years, student learning is gradual. Given that school age years are an opportunity for participants to explore and enhance breadth of STEM subjects, it is highly recommended that instead of perfecting through repetition, across each season, students advance to next level of learning.
6. Other Issues
With the advent of technology, computational resources as well as motors and drives have become extremely cheap and affordable; however, cost of entry in a competitive robotic tournament continues to be prohibitive for many teams. Table 1 shows a comparison of various control and drive kits available in the market.

Table 1.
Cost comparison of various programmable, platforms, and sensors.
Most hobby-grade control systems and hardware are not generally too expensive; however, equivalent proprietary competition electronics can often exceed several hundred dollars apiece.
Students from poor parts of the world do not have the resources to start and fund a team. Inherent to this issue is a prescribed set of computational platforms, actuation hardware such as DC motors, servo motors, and the structural elements from specific manufacturers. Many open source control and computation platforms such as Arduino, Raspberry-pi, and Beagle board are very popular in the DIY community and are equally capable. Additionally, there is an ecosystem of a range very cost-effective control, sensing communication, and display modules that is usable with the open source platforms. The cost effectiveness of such kits has become the de-facto choice for many disadvantaged schools and communities who wish to engage in STEM activities or want to participate in robotics competitions. However, stringent prescription of kits and suppliers prevents many teams from participation.
Another issue with competitive robotics is the requirement for extremely expensive field setup kits. When observed across multiple seasons, in FIRST, VEX, and similar challenges, the fundamental robot task has been confined to pick and place with the added complexity of stacking (Figure 2). Given the similarity of fundamental tasks, the same field-building elements can be re-used and reconfigured so that the cost for a team can be minimal. Another option is to use a minimal superset of field elements that can be reused for a range of challenges across many years. However, most of the leagues prescribe new field elements every, that may cost $1000 USD or more each year [18,19,22,28,32].
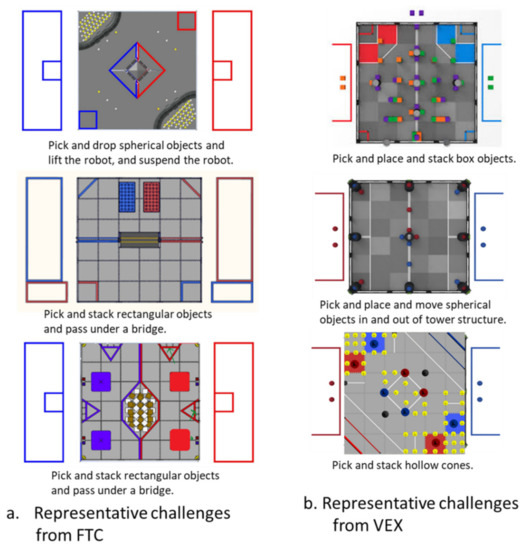
Figure 2.
Representative challenges for FIRST Tech challenge (FTC) [18] and VEX [28].
7. A Suggested Approach for A Robotics Curriculum: Its Impact on Learning and World Robotics League
Over last few years, coaches and educators from World Robotics League (WRL) developed a systematic approach to teaching robotics to students. Contrary to the “challenge at hand” approach, emphasis has been on following curriculum-led challenges. The challenges align with the curriculum and are offered in growing order of complexity (Figure 3 and Figure 4). As the students progress within the season, they accumulate certain points. The points become indicators of their preparation as well as the extent of subject matter grasp. Any engagement as an educator, mentor, and referee requires a minimal qualification process via certification and testing.
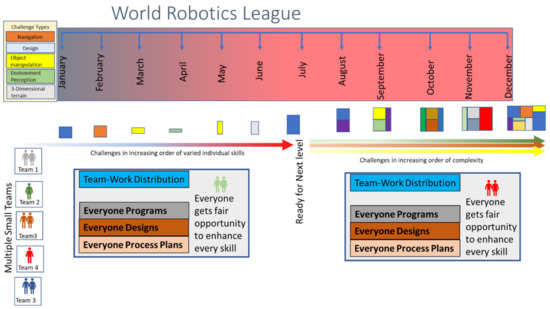
Figure 3.
Participation and progression in the World Robotics League (WRL).
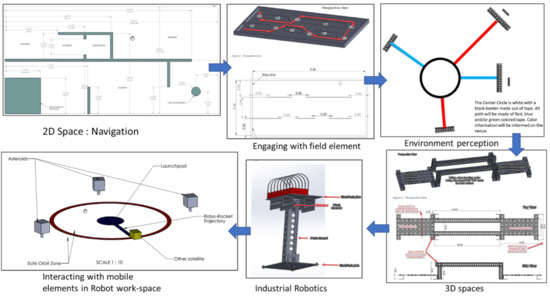
Figure 4.
A representative set of challenges for a WRL season to show increasing order of complexity.
So that students continue to learn newer skills and need not unnecessarily return to the same level of exploring, the World Robotics League has prescribed various levels including apprentice, craftsman, and master. Within each level, a participant continues to learn and advance to the next level. A representative set of topics and levels is described below:
7.1. Curriculum and Competitive Path for WRL
Apprentice
- 1
- Mechanical drives
- 2
- Kinematic chains
- 3
- Robot Navigation—Differential drive for mobile robots
- 4
- Robot Navigation—Active steering for mobile robots
- 5
- Push, pick and place, end effectors
- 6
- Remote-controlled completion of tasks on a 2D-terrain
- 7
- Robot as a programmable system
- 8
- Autonomous robots—Feedforward programming
- 9
- Autonomous robots—Sensor based environment perception
Craftsman
- 1
- Autonomous robots—completion of tasks in for 3D-terrain
- 2
- Autonomous robots—dynamic robot space
- 3
- Robots for 3D terrains and confined spaces
- 4
- Composite mechanical drives and kinematic chains
- 5
- Complex end effectors with variable gripping
- 6
- Advance sensing and environment perception for mobile robots
- 7
- Architecture of industrial robots.
- 8
- Machine learning and vision guided maneuvering
Master
- 1
- Self-locating and spatial query of the robot workspace
- 2
- Vision for robot environment perception and configuration space transform
- 3
- Automated completion of tasks based on feedback and feedforward controls on a 3D-terrain and dynamic robot space.
- 4
- Automated robots for 3D terrains and confined spaces
- 5
- Drone guided spaces
- 6
- Semi-automated air, water, and land robots
- 7
- Design of robots using Industrial mechanical and electrical components
- 8
- Robot intelligence using industry standard programming languages and practices
- 9
- Automated path planning
- 10
- GPS guided robot and autonomous maneuver
7.2. Team Size
Within the WRL, the team sizes are small and flexible (Figure 3). The size of the team is dependent on the complexity of problem so that all participants get ample opportunity to contribute to different aspects of robotics.
As described in the Figure 3 and Figure 4, the initial set of challenges are offered specific to topics in navigation, sensing, material handling, programming, etc. This ensures that every participant had ample opportunity to learn and explore the key topic. In the next phase, the complexity of challenges is increased and combination of various skills is required to solve the problems.
7.3. Reusability and Ease of Setting Up Challenge Field
So that the resources are optimized and the path to entry within WRL is easy for all levels of participant, the WRL has prescribed a kit (Figure 5). The same kit can be used for variety of challenges including 2D space, environment perception, 3D spaces, industrial environment, etc. In fact, the same kit can be easily used across apprentice, craftsman, and master levels. Figure 5 describes the universal challenge set and Figure 6 describes various challenges built with the help of the kit.
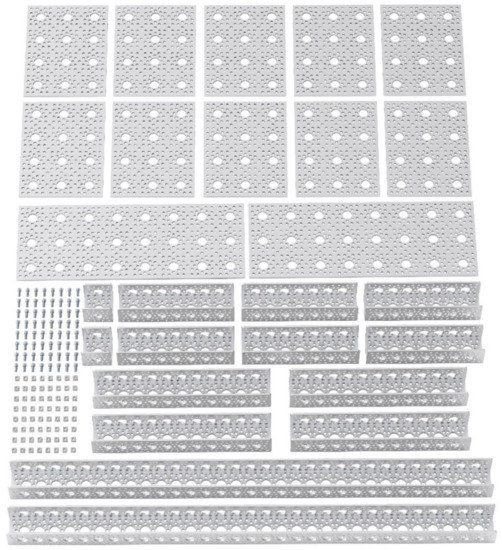
Figure 5.
A sample WRL universal kit [33].
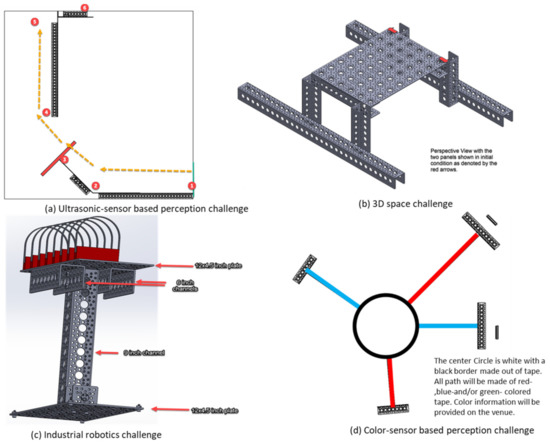
Figure 6.
Multiple challenges built using the WRL universal kit.
As described in Figure 7, in case any special items are required for the challenge, the WRL provides instructions on how to build parts using easily available material such as tape, paper, wire, and carboard; the flat pattern as well as detailed instructions to build the parts.
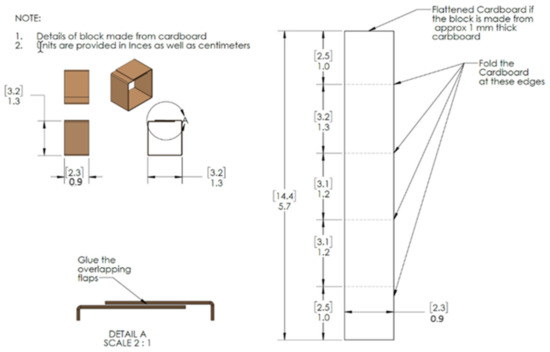
Figure 7.
Sample field elements built using cardboard and tape-1.
8. Initial Results of WRL
Across multiple years, the WRL has released multiple challenges [21] on monthly basis. Approximately 325 students participated in WRL. In its implementation, the WRL sustained its model of offering a wide range of challenges in systematic multi-stage participation in meaningful context.
Small team sizes allowed many willing participants to participate and explore. By being cost-agnostic, any platform can be used to program as well as build robots. This opened an opportunity for educators and students from poorer communities to be able to participate on a global platform. This model was especially relevant for the situation presented by the coronavirus disease 2019 (COVID-19) pandemic. Schools and communities are usual avenues for teams to meet and share the resources that otherwise are extremely expensive for individuals. With the ability to use a cheaper robotics platform, many organizations and teams that would have chosen to postpone or not participate at all were able to participate.
In the survey with the participants of WRL, very specific questions were asked:
- 1.
- Coaches/Educator (29 responses): Did you use WRL self-evaluation and certification?Findings Summary: (Yes—21, No—8)While WRL as such did not provide a reading and preparation material; testing and coach certification helped the coaches assess their understanding of the subject matter and the areas that need improvement.
- 2.
- Participant response (179 responses): How many challenges did you participate in over the year? (75% or more—118, between 75% to 50%—48, less than 50%—13)Findings Summary: (75% or more—118, between 75% to 50%—48, less than 50%—13)Context-based challenges such as odometry-based navigation, sensor-based navigation, complex task execution did help each participant build a minimum skill set. With the competitive events organized hand-in-hand with learning, effective interventions could be done. A small group of participants felt that the large team setting helped work distribution amongst the participants.
- 3.
- Parents response (93 responses): Would you consider WRL as an effective framework for your child to learn and excel?Findings Summary (Yes—87, No—4, Not enough context—2):Similar to the traditional courses, clear and quantifiable indicatives of learning and progress are extremely valuable. By providing a platform that allows independent learning and experimenting, significant time is saved and additional learning opportunities are identified. Having undergone problem resolution exercises, a student can understand and grasp alternate solutions from other participants easily.
Another valuable indicator that should be discussed is that the participants from WRL also participated in various other leagues due to opportunities available through schools and other community organizations. The students trained through WRL consistently excelled through various levels of progression and were recognized for their technical excellence. Within North Texas, of about 600 teams participating in a season, 60 advances to regionals; the teams who had participated earlier at WRL represented 1/3rd of the teams advancing to the Regional levels and were consistently nominated for the world championship levels pretty much every year [34,35]. Another key observation is that the students who trained and learnt with WRL as a platform continued their engagement and excellence in robotics over multiple years.
While WRL enabled a choice of range of platforms, the participation was until then primarily on popular and familiar platforms such as Lego, VEX, Thames and Kosmos, etc. Using such as wide and heterogenous range of platforms requires further investigation. Additionally, most of the participation has been from North America, Europe, and Asia. Verification of the WRL as a framework to assess competitive robotics across geographically, demographically, and economically diverse teams is the focus of 2021.
9. Conclusions and Future Work
A systematic, goal-driven robotics curriculum along with competent and trained teachers is extremely effective for successfully training the students. A need for a universally accepted robotic curriculum is identified and proposed. A one-season one-theme approach to competitive robotics limits the learning and exploring opportunities for the students.
Additionally, the price and structure of many existing competitive robotics avenues compounded by vendor-dictated kits limit the participation to financially strong students. Participation formats such as WRL are platform agnostics, hence not only do more students get opportunity to participate, but also the vendors are given a playfield; providing a distinct advantage to the students and participants.
Many novel issues such as platform agnostics and impact of material and learning resources require additional investigation.
Author Contributions
Formal analysis, A.K., B.B., N.G., R.M., and V.A.; investigation, A.K., B.B., N.G., R.M., and V.A.; supervision, R.D.; writing—original draft, R.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not Applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wilson, H.J. What Is a Robot, Anyway? Harvard Business Review. Available online: https://hbr.org/2015/04/what-is-a-robot-anyway (accessed on 2 November 2020).
- Ardito, G.; Mosley, P.; Scollins, L. We, robot: Using robotics to promote collaborative and mathematics learning in a middle school classroom. Middle Grades Res. J. 2014, 9, 73–88. [Google Scholar]
- Forsström, S.E.; Afdal, G. Learning Mathematics through Activities with Robots. Digit. Exp. Math. Educ. 2020, 6, 30–50. [Google Scholar] [CrossRef]
- Guastella, D.; D’Amico, A. Teaching Physics Concepts Using Educational Robotics. In International Conference EduRobotics 2016; Advances in Intelligent Systems and Computing; Springer: Cham, Swizterland, 2020; Volume 946. [Google Scholar] [CrossRef]
- Anwar, S.; Bascou, N.A.; Menekse, M.; Kardgar, A. A Systematic Review of Studies on Educational Robotics. J. Pre-Coll. Eng. Educ. Res. JPEER 2019, 9, 2. [Google Scholar] [CrossRef]
- Alesi, M.; Bianco, A.; Luppina, G.; Palma, A.; Pepi, A. Improving Children’s Coordinative Skills and Executive Functions: The Effects of a Football Exercise Program. Percept. Mot. Skills 2016, 122, 27–46. [Google Scholar] [CrossRef] [PubMed]
- Bredenfeld, A.; Hofmann, A.; Steinbauer, G. Robotics in Education Initiatives in Europe—Status, Shortcomings and Open Questions. In Proceedings of the SIMPAR 2010 Workshops International Conference on Simulation, Modeling and Programming for Autonomous Robots, Darmstadt, Germany, 15–16 November 2010; pp. 568–574. [Google Scholar]
- Calnon, M.; Gifford, C.M.; Agah, A. Robotics competitions in the classroom: Enriching graduate-level education in computer science and engineering. Glob. J. Eng. Educ. 2012, 14, 6–13. [Google Scholar]
- Browne, A.F.; Conrad, J.M. A versatile approach for teaching autonomous robot control to multi-disciplinary undergraduate and graduate students. IEEE Access 2017, 6, 25060–25065. [Google Scholar] [CrossRef]
- Frangou, S.; Papanikolaoum, K.; Aravecchia, L.; Montel, L.; Ionita, S.; Arlegui, J.; Pina, A.; Menegatti, E.; Moro, M.; Fava, N.; et al. Representative examples of implementing educational robotics in school based on the constructivist approach. In Proceedings of the SIMPAR Workshop on Teaching with Robotics: Didactic Approaches and Experiences, Venice, Italy, 3–4 November 2008; pp. 54–65, ISBN 978-88-95872-01-8. [Google Scholar]
- Brooks, J.; Brooks, M. In Search of Understanding: The Case for Constructivist Classrooms; Association for Supervision and Curriculum Development: Alexandria, VA, USA, 1999. [Google Scholar]
- Super, S.; Wentink, C.Q.; Verkooijen, K.T.; Koelen, M.A. How young adults reflect on the role of sport in their socially vulnerable childhood. Qual. Res. Sport Exerc. Health 2017, 11, 20–34. [Google Scholar] [CrossRef]
- Verkooijen, K.T.; Wentink, C.Q.; Koelen, M.A.; Super, S. Exploring the Sports Experiences of Socially Vulnerable Youth. Soc. Incl. 2017, 5, 198–209. [Google Scholar] [CrossRef]
- Dwivedi, R.; Dwivedi, S. Your Guide to Excel in FIRST Tech Challenge: Robot Architecture, Design, Programming and Game Strategies; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2018; ISBN1 1723085154. ISBN2 978-1723085154. [Google Scholar]
- Dwivedi, R.; Dwivedi, S. Your Guide to Excel in First Lego League: Robot Architecture, Design, Programming and Game Strategies; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2017; ISBN 978-1975697341. [Google Scholar]
- Game Rules for World Robot Olympiad. Games & Rules—World Robot Olympiad Association, World Robot Olympiad Association. 2020. Available online: https://wro-association.org/wro-2020/games-rules (accessed on 2 November 2020).
- Available online: https://www.firstinspires.org/robotics/fll (accessed on 2 November 2020).
- Available online: https://www.firstinspires.org/robotics/ftc (accessed on 2 November 2020).
- Available online: https://www.firstinspires.org/robotics/frc (accessed on 2 November 2020).
- Available online: https://www.bestrobotics.org/site/ (accessed on 2 November 2020).
- Available online: http://worldroboticsleague.com/ (accessed on 2 November 2020).
- Available online: https://www.roboticseducation.org/radc/ (accessed on 2 November 2020).
- Available online: https://robonation.org/ (accessed on 2 November 2020).
- Available online: https://gonrl.org/ (accessed on 2 November 2020).
- Available online: https://www.thenrc.org/ (accessed on 2 November 2020).
- Available online: https://coachfredi.wixsite.com/nurc/blank-15 (accessed on 2 November 2020).
- Available online: https://junior.robocup.org/ (accessed on 2 November 2020).
- Available online: https://www.vexrobotics.com/v5/competition (accessed on 2 November 2020).
- Available online: https://www.robo-one.com/en/ (accessed on 2 November 2020).
- Available online: https://en.wikipedia.org/wiki/Micromouse (accessed on 2 November 2020).
- Available online: https://www.kipr.org/ (accessed on 2 November 2020).
- 2020 FIRST® Robotics Competition Game and Season Manual” FIRST. 2020. Available online: https://firstfrc.blob.core.windows.net/frc2020/Manual/2020FRCGameSeasonManual.pdf (accessed on 2 November 2020).
- Available online: https://www.servocity.com/kits/ (accessed on 2 November 2020).
- Available online: https://www.perotmuseum.org/about-us/newsroom/news-releases/2018/02/fll-2018.html (accessed on 2 November 2020).
- Available online: https://flltournament.com/resultlist.aspx (accessed on 2 November 2020).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).