1. Introduction
1.1. Background and Motivation
The number of objects connected to the cloud has been rising dramatically in the last few years. The Internet-of-things (IoT) and Machine-to-Machine (M2M) communications will constitute a growing portion of traffic in next generation networks [
1]. Wireless links used as the final hop between infrastructure and objects are key in achieving mobility, pervasiveness and flexible deployment. Wireless Sensor and Actuator Networks (WSANs) are thus considered as one of the main enablers of the concepts of IoT, Big Data, cloud computing and smart cities. Large numbers of sensor/tags will collect measurements from the physical world and relay them to the cloud or edge processors where added-value business, control, or management information can be exploited for different applications.
The use of wireless technologies in critical industrial applications has been usually linked to risks of reliability, security, safety and interference (see
Table 1). This idea has been slowly changing over the past few years. Wireless technologies have been constantly improving, becoming now serious candidates to compete and in some cases replace their wireline counterparts [
2]. However, there are still several issues to address in the integration of modern wireless technologies into highly critical industrial applications.
Modern radio technologies provide flexible deployment, over-the-air management, troubleshooting capabilities and improved data rates. However, they still suffer from interference, capture by eavesdroppers, wireless channel fading, shadowing and multi-path distortion. By contrast, wireline technology is in general more reliable. In some applications, wireline solutions are real-time and/or deterministic. The disadvantage of this type of solution is a complex infrastructure with critical cabling design, costly troubleshooting, maintenance & repair operations and in some cases (e.g., in transport systems) increased weight and fuel consumption. For example, modern aircraft are machines with complex wiring and cable design plans. It is estimated that the use of wireless instead of cable will bring a considerable increase in terms of fuel efficiency. Cabling planning tasks have an estimated cost of 2200 dollars per kg of aircraft [
4]. Estimated savings can reach 14–60 million dollars per aircraft [
5]. Electrical wiring problems cause fires, mission aborts and lost mission hours. Each year, companies and governments spend high numbers of man-hours finding and fixing wiring problems [
6]. Damage on cables can affect not only the system related to the faulty wire, but also contiguous systems [
2]. It is also estimated that 13% of an aircraft operation cost is related to maintenance, reparation and overhaul [
5]. Therefore, wireless is expected to bring considerable gains in terms of reduction of wires, more flexible design, coverage of locations difficult to reach by wires and improved maintenance/troubleshooting. In aeronautics, the new paradigm has been called “fly-by-wireless” [
7]. A summary of advantages vs. disadvantages of wireless links in industrial settings extending the analysis provided in [
3] for aeronautics applications is shown in
Table 1.
Despite all the advances in the last few years, there is still a gap in the state of the art on how to address the dependability issues of wireless technologies to be used in highly critical applications in different industrial domains.
1.2. Specific Project Motivation
DEWI (Dependable Embedded Wireless Infrastructure) was an ARTEMIS European project focused on the development of dependable WSANs in four industrial domains: aeronautics (SP2), automotive (SP3), rail (SP4), and building (SP5) [
8].
The DEWI project addressed the need in industrial domains to integrate new and legacy wireless sensor networks with existing critical wireline technology and modern IoT solutions. This convergence has the challenge of increasing the dependability of wireless and IoT solutions to match the high criticality requirements in many industrial use cases. For example, in aerospace applications, wireless sensor hardware and protocols need to be improved to cope with the harsh temperature, wind and vibration conditions. This adaptation also involved protocol modifications to deal with errors or latency requirements. Therefore, DEWI addresses the many different issues that need to be tackled to integrate commercial sensor and IoT technology to highly critical and dependable industrial use cases. The DEWI architecture provides the entities, functionalities and models needed from the industrial organization point of view to address the dependability improvement for different use cases.
1.3. Project Objectives
DEWI was a project based on a set of industrial use-cases that attempt to show the benefits of WSANs by enforcing dependability, reusability, interoperability and cross-domain development. The core of the DEWI solution is the concept of the DEWI Bubble. A DEWI Bubble is a logical entity operating in a physical space delimited by the range of the wireless transmission technologies employed for intra-bubble communications. A DEWI Bubble is formed by a group of DEWI Bubble Nodes, DEWI Bubble Gateways and internal users. They are located in short range to each other to ensure a local confinement. The Bubble may be organized in different topologies: distributed (ad-hoc), centralized (with an access point), or hybrid. The DEWI Bubble is therefore a high-level abstraction of an industrial WSAN with enhanced interoperability, dependability, standardized access to sensor readings and cross-domain development. DEWI foresees a landscape of communicating bubbles implemented in different industrial use cases that can be called the “Internet-of-bubbles”. Each Bubble can decide, if convenient, to allow transparent access to the nodes or “things” inside the bubble or provide only consolidated, aggregated, or processed information. This represents a hybrid approach between conventional WSANs and modern IoT systems.
This paper provides the description of the DEWI High-Level Architecture (HLA). The objective of this HLA is to boost the use of industrial WSANs. This HLA defines the hierarchical organization of the different devices/modules/entities that constitute the infrastructure internal and external to the DEWI Bubble. This also implies the description of functionalities, as well as the definition of DEWI Bubble Services, interfacing protocols and interoperability features. The term high-level is used here to denote a system-level overview of a sensor network. A high-level architecture is thus useful to provide a coherent structure to a network, improve resource organization and optimize infrastructure.
In modern network architectures, it is common to use what is called
views or
perspectives of the system. This approach allows designers to look at the system from different angles matching the multiple requirements of modern network design with multiple stakeholders and providing an enriched perspective of the system. This paper uses this multi-perspective approach to understand in a better way the different aspects and attributes of the DEWI Bubble and its services. The definition of the DEWI HLA is accompanied by the glossary available in [
9]. This paper extends the preliminary definition of the DEWI HLA provided in the conference paper in [
10].
This paper is organized as follows:
Section 2 presents a summary of previous works on architectures for WSNs (Wireless Sensor Networks).
Section 3 provides an overview of the DEWI HLA and its main design elements.
Section 4 presents the entity model.
Section 5 presents the layers of the architecture that are useful for the organization of the Bubble infrastructure.
Section 6 presents the functional model as an extension of the ISO/IEC SNRA (sensor network reference architecture) in [
11]. A description of the interfaces is provided in
Section 7. Finally,
Section 12 presents the conclusions.
2. Related Works
The area of WSANs has been intensively investigated over the last few decades. The number of architectures and solutions for WSANs deserves a research area of its own. The concept of architecture is used in many different aspects and from many different perspectives of system design. Some architectures depend on particular protocol proposals in the network or lower layers. Other architectures are focused on specific physical (PHY) layer attributes such as energy saving. Others focus on high-level aspects such as semantics or security, cloud computation, etc. More recently, the concept of IoT has generated a large number of architecture and reference models that can also cover some parts of WSAN technologies. A sensor network reference architecture (SNRA) is defined in [
11] as: “Framework that provides common features collected from different types of sensor networks not only to provide developmental guidelines and reuse but also to describe the interrelations and interactions among the entities in a sensor network and possibly between sensor networks”. The project IoT-A [
12] provides the following definition of reference architecture: “Reference Architecture describes essential building blocks as well as design choices to deal with conflicting requirements regarding functionality, performance, deployment and security. Interfaces should be standardised, best practices in terms of functionality and information usage need to be provided”. From the perspective of WSNs, the following classification of architectures was proposed in [
13]:
Data centric. Data-centric architectures are characterized by a vast number of randomly deployed sensors that only communicate node-to-node without any global network identification.
Hierarchical. Most hierarchical architectures consist of sensor nodes grouped into clusters. Cluster heads build intra-cluster communication with other nodes within the same cluster, but they also build inter-cluster communicate with other cluster heads.
Location-based. Location-based architectures along with their underlining routing algorithms rely on knowledge of nodes’ positions to route packets.
Mobility-based. Mobility-based architectures assume that a source, a sink, or intermediate nodes change their positions over time.
QoS-based. QoS architectures are characterized by stringent requirements such as packet end-to-end network delay and packet end-to-end energy cost.
Others: network-flow, multi-path and heterogeneity-based
The work in [
14] characterizes different types of WSNs depending on application: terrestrial, underground, underwater, multimedia and Mobile WSNs. Regarding standardized architecture, the ISO/IEC Sensor Network Reference Architecture (SNRA) is the basis for the DEWI HLA functional layer model (described later in this paper). The architecture has also been mapped to current state-of-the-art IoT architectures such as:
Iot ARM (Architecture Reference Model) [
12],
The IoT6 architecture [
15],
The ISO/IEC reference model [
11],
AIOTI (Alliance for the IoT Innovation) high level architecture [
16],
ITU IoT reference architecture [
17], and
IEEE P213 reference architecture [
18].
Interoperability architectures are also relevant for WSN applications. The INTEROP project [
19] proposed a framework based on model driven development concepts that uses a three-layer abstraction model with ontologies and semantic representation between the different layers. This allows designers to introduce non-functional aspects in architecture design such as trust, security and privacy. A large number of enterprise interoperability architecture proposals can also be used in the context of WSN applications.
An improved service-oriented architecture (SOA) for wireless sensor networks has been proposed in [
20]. SOA is a paradigm that results in being attractive for WSNs due to its ability to separate functions into distinct units (services) which make system design flexible, modular, loose coupled and interoperable. The authors in [
20] propose a SOA with auto-configuration capabilities for nodes of distinct capabilities: low-capacity, limited capacity and full capacity, implementing different web services for each type, as well as appropriate software stack to enable interoperability between the different protocols. Low capacity nodes implement a WSN-SOA protocol with reduced complexity running TinyOS.
SOA has become an important approach in middleware development for WSNs. A pioneering contribution recognising SOA potential for WSNs can be found in [
21]. The work in [
22] provided a solution to access ZigBee nodes via DPWS (Device profile Web Services) clients. SOA-based architecture standard has been defined in the Sensor Web Enablement (SWE) standard in [
23], called Open Sensor Web Architecture (OSWA), achieved by the Open Geospatial Consortium (OGC). This standard also defined the SensorML language for data exchange between sensors using XML (Extensible Markup Language) grammar. Web service interfaces for IEEE 1451 were proposed in [
24]. Integration of WSANs with IT infrastructure has been reported in [
25] by enabling devices with direct interface using SOAP (Simple Object Access Protocol) rather than using gateways, thus simplifying the design.
Despite these advances in the literature, the integration of WSANs into critical industrial use cases using modern IoT protocols has not been addressed in a consolidated effort, but rather spread in many individual and inconsistent approaches. The objective of the DEWI HLA is to contribute to filling this gap in the literature of WSAN architectures.
3. Overview of the HLA and Design Elements
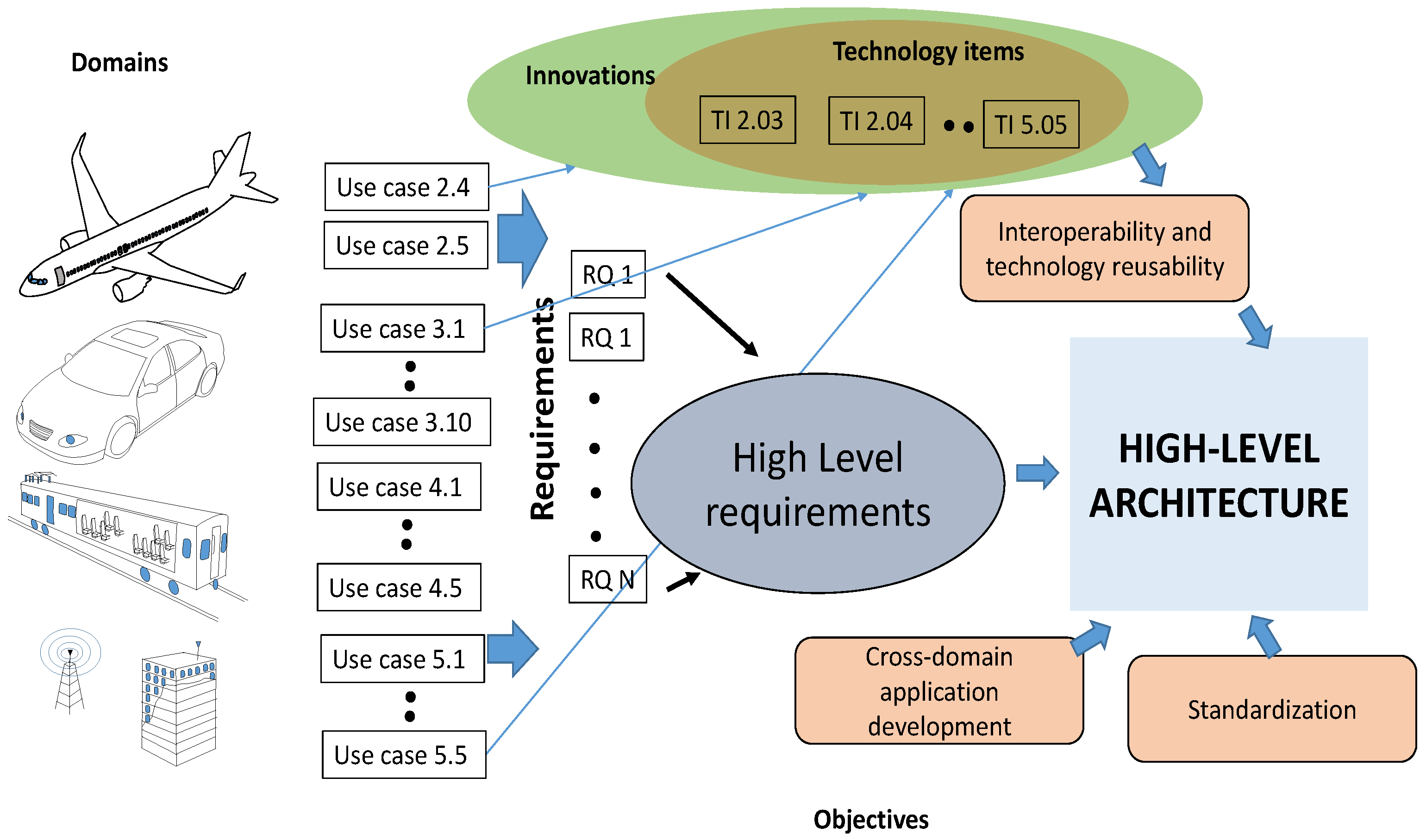
The design elements of the DEWI HLA are summarised in
Figure 1. The HLA considers the high-level requirements (HLRQs) of a set of use-cases from different industrial domains. It also considers technology innovations, standardization, cross-domain development, technology reusability, and interoperability. The DEWI use cases are enlisted in
Table 2.
The DEWI HLA is the basis for the cross-domain innovation encapsulated by the DEWI technology items (TIs) displayed in
Table 3. These TIs are specific topics of technology innovation within each DEWI industrial domain. Innovations proposed in aeronautics domain can be potentially reused, adapted, improved, or cross-optimized in some automotive or railway applications. This cross-domain fertilization also concerns potential synergies, improvements, and eventually with the development of common middleware components that exploit, manage and transfer data and technological solutions across multiple domains. These ideas are aligned with the vision for future networks based on the concepts of the IoT, M2M communications and Big Data.
The DEWI HLA provides flexible, federated and standardized access to sensor readings and TIs of different industrial domains with distinct underlying transmission technologies and data formats. This is one of the main issues in future systems of the IoT. The DEWI HLA also enables the use of actuators controlled by automated applications or by human clients using sensor and context information acquired by DEWI nodes. Therefore, our approach crossovers with the field of M2M communications. External developers will be able to create smart city and Big Data applications using the DEWI application program interfaces (APIs).
The DEWI HLA constitutes an extension of the ISO/IEC 29182 SNRA in [
11] towards the support of dependable wireless industrial applications. It has also included domain specific architectures such as the automotive architecture in [
26]. The HLA has been upgraded in the project SCOTT [
27] to support security metrics, trust-based design, privacy labels and security-safety IoT design. More recently, the project InSecTT(Intelligent Secure Trustable Things) in [
28] has adopted the enhanced DEWI HLA developed in SCOTT to investigate the convergence of Artificial Intelligence and the IoT. To formally introduce interoperability and technology re-usability, the DEWI HLA has adopted the model driven approach presented in the INTEROP project [
19]. To achieve high-level interoperability and data exchange over Internet infrastructure, the HLA has considered previous works such as the IoT-A reference architecture [
12], the IoT6 architecture [
15] and the Arrowhead framework [
29]. Regarding the use of actuators and automated control of devices based on sensor readings, the architecture design has also considered the ETSI M2M [
30] and one M2M [
31] framework. DEWI also considered 5G architecture frameworks such as METIS in [
32] for compatibility with future technologies.
5. Layered Hierarchy Model
This section provides a layered view of entity model described in the previous section. The layered view has been especially created to fit the needs of industrial use-cases with internal critical infrastructure.
5.1. Overview
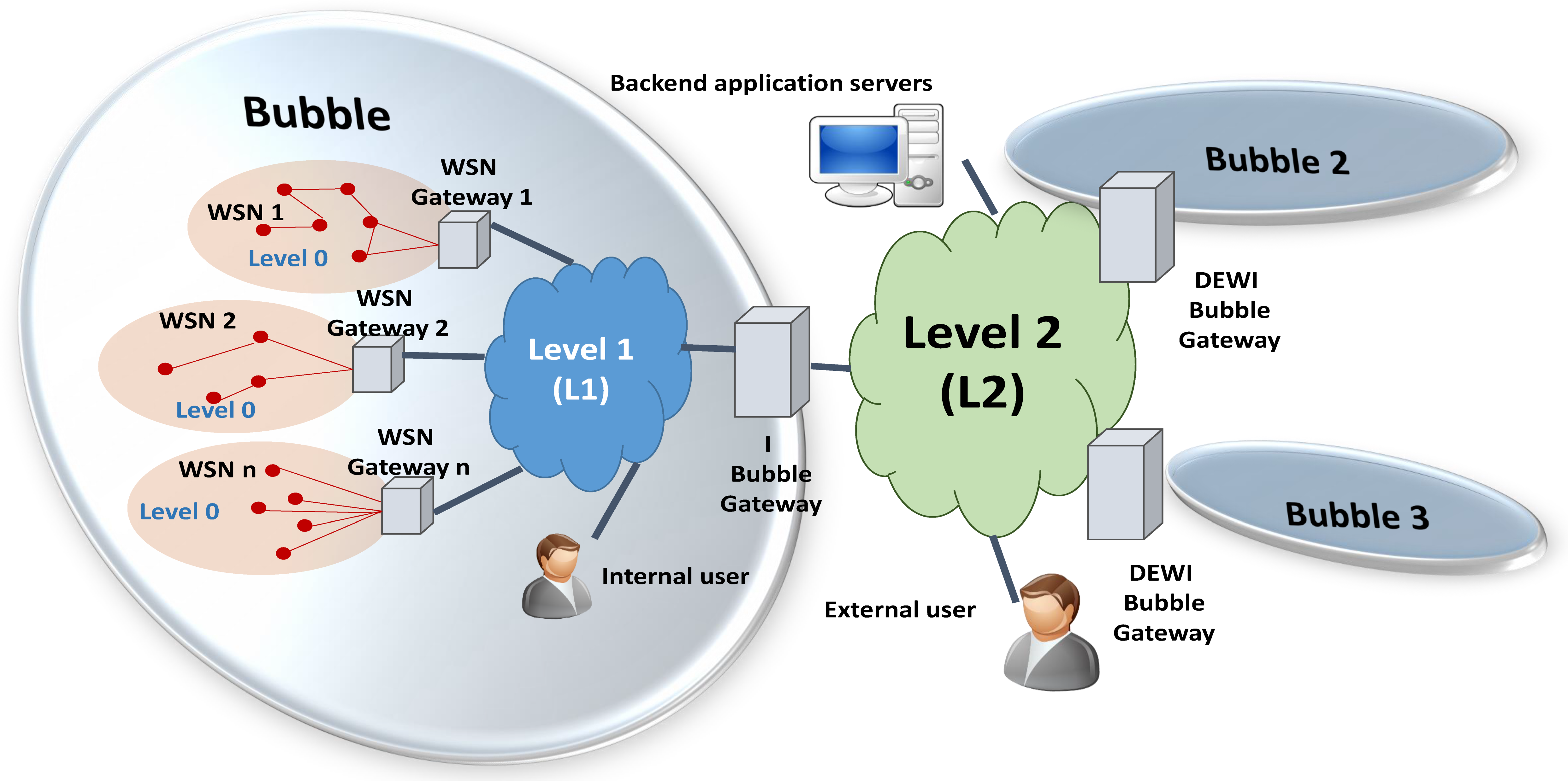
Two main features of the DEWI Bubble define the layered structure of the DEWI HLA as shown in
Figure 2:
Only one DEWI BGW (master) acts as the main point of interface with the outside world (alternate GWs are allowed but only for redundancy purposes), and
A DEWI Bubble is able host one or more WSNs, where each WSN can operate with a different technology (including legacy standards).
The intra-WSN (intra-Bubble WSN) space is called Level 0 or L0. Each WSN contains a set of devices (e.g., actuators or sensors) also known as DEWI Nodes. In case there is more than one WSN per DEWI Bubble, the DEWI Nodes are controlled by the corresponding WGW. Otherwise, they are controlled directly by the DEWI BGW. Each WGW establishes communication with the DEWI BGW, which acts as the coordinator of the different WSNs inside a Bubble. Therefore, the DEWI Bubble is effectively defined by the space where DEWI Bubble Services enabled by the master DEWI BGW are available to the following entities: WGWs (if there is any of them inside the Bubble), sensors/actuators (i.e., DEWI Nodes) and internal users. These features place the DEWI Bubble as a high-level abstraction of a WSAN enabled with DEWI Bubble services.
The infrastructure between WGWs and the DEWI BGW is called Level 1 (L1) or intra-Bubble. DEWI Bubbles thus have the ability of encapsulating underlying heterogeneous technologies (including legacy standards). This layered model enables compatibility between manufacturers and technologies. Additionally, layered models have shown effectiveness in terms of scalability, interoperability and infrastructure design. Level 1 is used to interconnect several WSNs to their corresponding DEWI BGW. The DEWI BGW gets the data of each WSN and exposes this information to the outside world. Level 1 is optional, mainly because, in some applications, one DEWI Bubble may only contain one WSN. In such case, the DEWI BGW acts as the direct coordinator of the DEWI Nodes (using L0).
The DEWI Bubble always has one logical master DEWI BGW. However, the architecture allows for redundant network devices, thereby supporting safety critical scenarios of industrial applications. In those use cases where wired L2 infrastructure is not available, a DEWI Gateway acting in relay mode (RGW) can be used to provide direct Bubble-to-Bubble communication (ah-doc infrastructure).
Level 2 or L2 is the technology that allows external entities to have access to the information of a DEWI Bubble via the DEWI BGW. This access to the information generated by the DEWI Bubble is achieved through convenient APIs that describe the set of DEWI Bubble services. Level 2 technology provides connection through the Internet and its protocol stack. IoT-based web services have been used for L2 communication. The development of a standard technology for accessing Bubble information of different use-cases of different domains is one of the main contributions of DEWI to the state of the art. This management of sensor information and Bubble services is reflected in the DEWI high level language with the convenient semantics to match the requirements of modern interoperability challenges plus the technology re-usability features for cross-domain application development.
5.2. Level 0 (Intra-WSN)
Level 0 (L0) is the technology used inside each WSN of a DEWI Bubble. L0 technology can be used to interconnect the DEWI Nodes with two different entities:
the WGWs (in case the DEWI Bubble contains more than one WSN) or
the DEWI BGW (in case a DEWI Bubble only hosts one WSN, i.e., L1 does not exist).
Level 0 technology choice is independent in each use-case. Level 0 is the short-range wireless technology used to interconnect, manage and retrieve the information from/to sensors and actuators (DEWI Nodes). The challenge in the design of the DEWI HLA and its appropriate infrastructure is to host such a diverse and heterogeneous landscape of technologies communicating with each other over standardized, open interfaces and using common data formats.
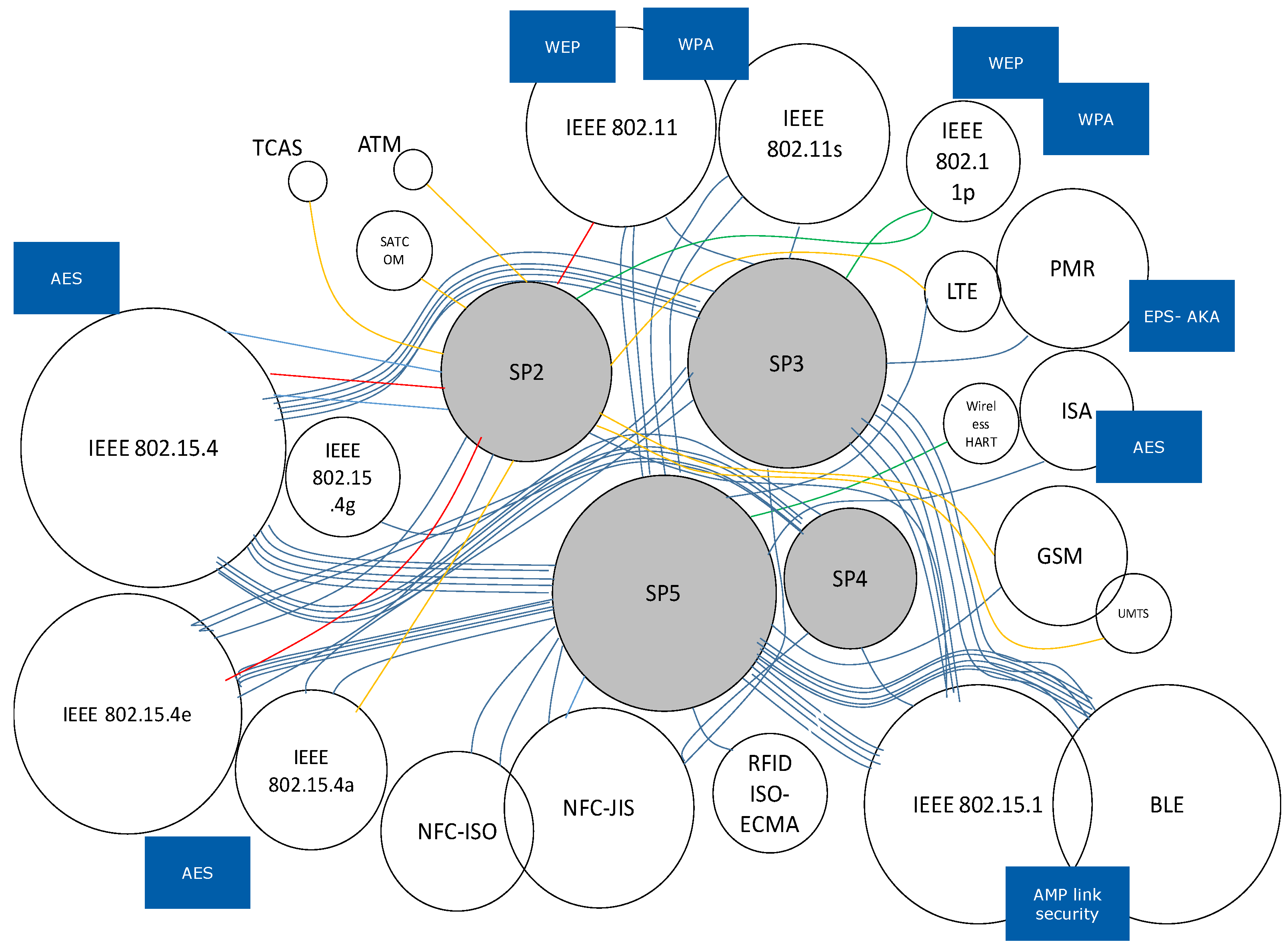
Figure 3 shows different wireless COTS (commercial off-the-shelf) L0 technologies in terms of data rate vs. range. For comparison purposes, the figure also includes long-range cellular standards.
Figure 4 shows all the wireless L0 standards used in the DEWI project per industrial domain. In this figure, each line represents a use case using or considering a particular standard technology. The size of the elements corresponds to a relative number of lines that end in the element (logarithmic scale). Colours indicate whether the solution is an explicit use of the standard (blue), a modification (red) or just a simulation or study of the technology (yellow). The figure also includes some typical security features of the different wireless standards. Note the dominance of IEEE 802.15.4, IEEE 802.15.1 and WiFi technologies across different domains. Ultra-wideband flavours of the different standards have been used for high capacity or harsh propagation scenarios. In some cases, the standards have been modified to improve interoperability, dependability or reusability. Spread spectrum solutions are known to be resilient against interference and jamming. Low data rate standards such as IEEE 802.15.4 have some difficulties to achieve real time and high dependability, but using improvements such as the ISA solutions, wireless HART, or new flavours of the same standard, it is possible to achieve a good trade-off in some particular applications.
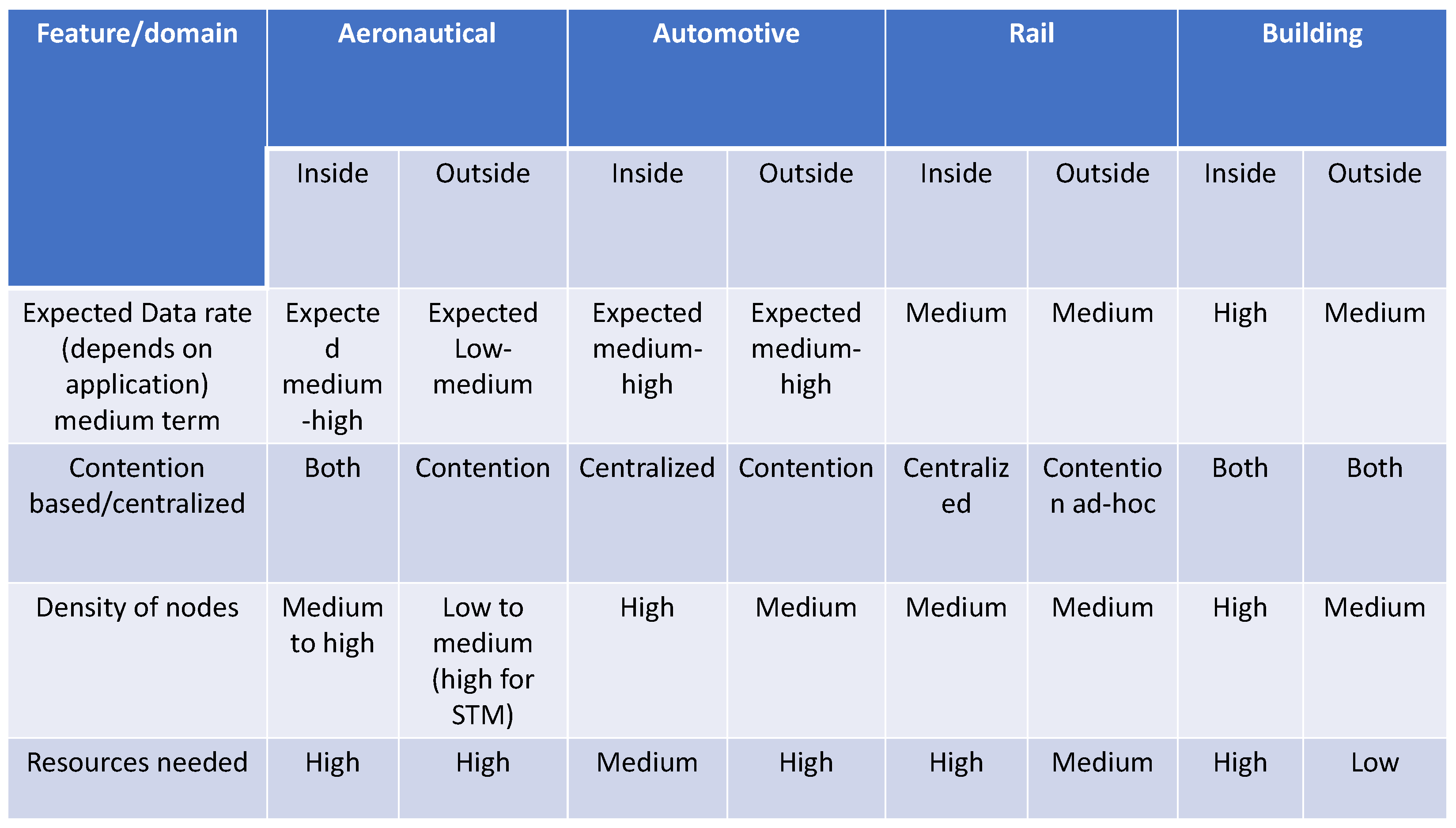
A summary of PHY-layer features of wireless technologies in the different domains of DEWI is displayed in
Figure 5. Note that this figure makes an explicit difference between internal and external networks. Internal networks usually refer to networks operating inside an aircraft, vehicle, or building. For example, a wireless network operating inside the cabin of an airplane. Some features in this table assume a generic scenario, and therefore they can change when considering a particular application or use case. Multi-path, fast fading, path-loss exponent, interference and diversity in terms of MIMO (multiple-input multiple-output) feasibility are the most common PHY-layer features investigated in different scenarios. PHY-layer features of different COTS technologies are displayed in
Figure 6. The table also includes some upper layer aspects such as transport capacity, and also some important metrics such as cost and commercial availability. Similarly, MAC layer features per domain and per COTS technology are summarized, respectively, in
Figure 7 and
Figure 8. Perhaps the main aspect to consider in different solutions is energy saving features, contention versus dedicated allocation, error recovery and frame design. Scalability can also be an important aspect to consider in dense network deployments. These features of available COTS technologies and the expected properties of the different domains have been considered by all use cases to achieve the best technology selection as reflected in
Figure 4.
5.3. Level 1 (Inter-WSN, Intra-Bubble)
Level 1 (L1) is the technology used to interconnect all the intra-Bubble WSNs to their corresponding DEWI BGW (in case the DEWI Bubble hosts more than one WSN). L1 is an optional technology. There are two main reasons why L1 is an optional feature in the HLA:
There are some use-cases in which the DEWI Bubble hosts only one intra-Bubble WSN. In these cases, the DEWI BGW and the WGWs converge in one single entity: L1 disappears and only L0 and L2 technologies are implemented; and
Different use cases have different requirements to interconnect the intra-Bubble WSNs.
There are several advantages of using a different L1 technology for different use cases. Some of them are listed below:
It allows network designers to meet domain-specific or use-case-specific design criteria,
It also improves scalability in the HLA, mainly because several WSNs can be hosted by one single DEWI BGW. Thus, the number of DEWI Nodes hosted per DEWI BGW increases according to the supported WSNs hosted by L1 technology.
It provides a useful organization of resources in dense WSAN deployments.
It allows for an efficient resource allocation by centralizing all the WSN management in one single location (logical): the DEWI BGW. This means, for example, that adjacent WSANs can be allocated in different channels by the DEWI BGW, thereby reducing interference inside the same DEWI Bubble (intra-Bubble interference).
The existence of L1 technology facilitates the integration of wireless DEWI Bubble solutions with the existing wired technologies of each domain, which is a unique aspect of DEWI. This aspect also improves the technology re-usability features of the HLA, mainly because some wireline technologies share common aspects across different industrial domains,
L1 can provide wired/wireless infrastructure for internal users to obtain access to DEWI Bubble services, and
L1 allows network designers to create a private internal network where high security and quality of service requirements can be enforced.
The decision of using L1 also conveys some additional efforts summarized as follows:
L1 needs an additional radio resource management layer to organize the different WSNs inside the Bubble.
L1 needs to design gateways and scheduling policies that match the quality of service and dependability requirements between L0 and L1.
The DEWI Bubble becomes a complex set of heterogeneous WSNs and wireline transmission protocols that need special cross-layer optimization algorithms.
Level 1 technology must also comply with several of the requirements and attributes of DEWI for intra-Bubble communications. Some of these requirements are the following:
L1 must provide reliable and transparent access to the information of the DEWI Nodes inside each Bubble.
L1 must preserve the dependable, self-configurable and secure data transfer of the DEWI Bubble.
L1 must provide the DEWI Bubble with a framework for the management, resource allocation, configuration, troubleshooting and maintenance of the intra-Bubble WSNs.
L1 must provide conflict resolution or deterministic allocation of the data streams and traffic of all WSNs.
L1 provides an interface for internal users of the DEWI Bubble to access the DEWI Bubble Services.
Level 1 in DEWI HLA is closely related to the existing infrastructure (wired) of each industrial use-case. An overview of L1 wired technologies in different industrial domains is shown in
Figure 9. Note the importance of IEEE 802.3 Ethernet (and its variations such as ARINC 664) and the CAN (Controller Area network) bus standards in different domains.The standards used in L1 are shown in
Figure 10 and the comparison of L1 technologies is shown in
Figure 11. Since L1 must preserve the dependability requirements inside the Bubble, middleware tools with message-oriented and application-oriented approaches are recommended. Service-oriented architecture for L1 provides the HLA with the flexibility to organize resources across different WSNs and model them as available services inside L1. Publish–subscribe middleware technologies fit perfectly the requirements of L1 high quality of service. A comparison of specific protocols for the realisation of L1 middleware is displayed in
Table 4. A brief summary of these protocols follows.
Message Queuing Telemetry Transport (MQTT) [
34] is an open M2M protocol for transporting telemetry style data over high latency networks. It is designed as very light publish/subscribe messaging protocol that runs over TCP/IP, or over other network protocols that provide ordered, lossless, bi-directional connections. The Advanced Message Queuing Protocol (AMQP) [
35] is an open Internet protocol for business messaging. It defines a binary wire-level protocol based on an OMG (Object Management Group) Standard. The OMG’s Data Distribution Service for Real-Time Systems (DDS) [
36] is an open middleware standard that enables scalable, real-time, dependable, high performance and interoperable data exchanges between publishers and subscribers. It supports different kinds of reliability, and scales better than the other protocols when the number of applications on the node producing and consuming the data increases.
The Hypertext Transfer Protocol (HTTP) [
37] is an application-level protocol for distributed, collaborative, hypermedia information systems, based on request/response pattern. The Constrained Application Protocol (CoAP) [
38] is a specialized web transfer protocol for use with constrained nodes and M2M networks. CoAP provides a request/response interaction pattern between application endpoints, supporting built-in discovery of services and resources. CoAP is designed to be compatible with HTTP.
From
Table 4, we can observe that the selection of L1 technology closely follows the characteristics of L0 selection. This is reflected in the complexity of implementation and requested resources. A summary of different middleware paradigms for WSNs is presented in
Table 4. For example, database paradigm approaches are not recommended for real-time applications, whereas application- and event-driven approaches represent a better fit to high dependability operation.
5.4. Level 2 (Outer Bubble)
Level 2 (L2) is the layer of the HLA in charge of the communication between DEWI Bubbles or the communication between DEWI Bubbles and external user(s) or agent(s). L2 is thus responsible for the interoperability and cross-domain application development. Level 2 is the way a DEWI Bubble exposes its information to the outer world. There are several features unique of Level 2 in comparison with the other two Levels of the HLA:
L2 uses Internet-based (IoT) protocols to enable external users with access to the set of DEWI Bubble services from anywhere in L2;
L2 is also responsible to provide federated access to a set of different DEWI Bubbles;
L2 must support interoperability, cross-domain application development and technology re-usability;
L2 must enforce security and protection to the data and operation of the DEWI Bubble against external malicious attacks;
L2 must use international standards to enable interoperability with other external systems.
In order to achieve these goals, L2 has adopted a service oriented architecture (SOA) with a middleware paradigm based on request–response. This paradigm is inherently non-real time. Therefore, L2 is envisioned as a layer where external users request access to a summarized version or non-real time information generated by the DEWI Bubbles. The DEWI functional model includes specific L2 services.
The DEWI solution to realize the concept of technology re-usability and cross-domain application development is the use of a profile repository. This repository stores configuration details, TIs and other cross-domain parameters. DEWI Bubbles have access to this repository where they retrieve technology solutions developed across different use cases. These technology solutions are reused, optimized and modified across different DEWI Bubbles. The DEWI high level language reflects the interoperability and technology reuse attributes of the DEWI HLA. This language hosts the DEWI high level functionalities. This high level language also relies on an API that uses the middleware services of a SOA. This SOA reuses aspects of existing approaches such as the Arrowhead project [
29].
The DEWI Bubble represents a hybrid solution by combining three main aspects: (1) it extends the ISO/IEC SNRA to be fit for industrial applications of WSNs via the two first levels of three-tier model, (2) it enables compatibility with existing and potentially real-time infrastructure via L1, and (3) it uses modern M2M and IoT tools for cross-domain interoperability and technology reusability via L2.
5.5. L2 Technology Evaluation
Different technologies have been investigated to realize the concept of L2 inter-bubble communication. A comparison of modern protocols for L2 communication is shown in
Table 5,
Table 6,
Table 7 and
Table 8 (Messaging, resource discovery, data serialization and syntax/semantics, respectively). The upper layer protocol standards used by the project are displayed in
Figure 12.
5.5.1. Data Exchange Technologies
Data exchange amongst elements refers to the mechanisms provided by the gateway to bring the information generated by DEWI nodes to external applications. Web Services or Message Queue protocols provide intercommunication between entities ensuring interoperability, asynchronous operation, platform independence and flexible applications. RESTful services [
39] offer the best trade-off between performance and flexibility. Web Services are deployed over standard Internet technologies, like HTTP (Hyper Text Transfer Protocol) [
37], where security (such as SSL or secure socket layer [
40]) is already built-in.
SOAP (Simple Object Access Protocol) [
41] is an XML-based (Extensible Markup Language [
42]) message protocol that follows a request/response model schema and relies on document descriptions such as DTD (Document Type Definition) [
43] or WSDL (Web Services Description Language) [
44]. The use of large text-based XML files requires extra computation time to be processed.
CoAP [
38] is another approach that is quite similar to RESTful services, but it is specially designed for constrained environments over UDP networks. Websockets [
45] represents other solution that is based on maintaining a permanent connection between both sides. Websocket is still a young technology and does not offer support for some architectures, servers and web browsers.
5.5.2. Resource Discovering, Profiles and Catalogues
Resource/service discovering refers to the ability of devices for discovering devices that are willing to offer interfaces or mechanisms for data exchange. One of the first technologies was the Universal Description, Discovery and Integration (UDDI) [
46]. The interface follows the WSDL or WADL [
47] description files.
Other solutions as Web Services Dynamic Discovery (WS-Discovery) [
48] and Simple Service Discovery Protocol (SSDP) [
49] use pre-defined IP multicast addresses. Both protocols reply with the list of their available services using a unicast message.
DNS-SD [
50] based service discovery that relies on the existent DNS Internet protocol. The IPSO alliance [
51] defines a set of resources under unique identification codes that can be accessed by URIs [
52] in the same way that RESTful services are invoked. The IPSO architecture model is based on the OMNA Lightweight M2M (LWM2M) [
53] Object & Resource Registry that provides naming for objects and resources.
Hyper/Cat [
54] is an open, lightweight hypermedia catalogue based on JSON (Java Script Open Notation) [
55] that provides mechanisms for exposing collections of URIs specially optimised for IoT. Semantic Annotation for REST (SA-REST) [
56] defines a set of basic properties that can be used to non-intrusively annotate HTML/XHTML documents [
57]. Another approach is Swagger [
58], a specification for web services documentation. The documentation is provided by accessing a web service returning a JSON response.
5.5.3. Information Model: Data Serialization and Formatting
Serialization is defined as the process of translating data structures or objects into a format that can be stored in a repository or transmitted across a network and reconstructed in another computer environment.
XML provides tools and mechanisms for defining its own tags, providing a certain degree of syntax and semantic structure to the document in a human-readable form. YAML Ain’t Markup Language (YAML) [
59] is a human-readable data serialization format that reduces the excessive amount of tags employed by XML.
Solutions such as CBOR (Concise Binary Object Representation) [
60] map data into reduced binary data obtaining an extremely small size packets. CBOR suits well for constrained environments, but it requires two steps; the process of serialization-marshalling and the encoding process.
TLV (Type-Length-Value) is a data format type that encodes data in a short form. It is extremely easy to parse and it is easy to transform to other readable formats. JavaScript Object Notation (JSON) is becoming the most used solution for data exchange. This data format maintains the human-readable style form, but it reduces the excessive meta-data and tag info.
5.5.4. Information Model: Data Content (Syntax and Semantics)
Two main approaches are adopted by the existent solutions: the definition of a common format and the use of ontology models. Solutions such as the OMA lightweight M2M protocol and model for device management are based on the Simple Object resource model stack. Identification numbers are registered and published by the OMA Naming Authority. The information is exchanged through CoAP/RESTful services.
In addition, IPSO is a simple data model for the semantic interoperability across IoT devices. It provides semantic-data interoperability amongst devices by using simple URI addressing and few data types. It is completely based on the OMA Lightweight M2M (LWM2M) Object & Resource Registry. The IPSO Application Framework defines a RESTful design for IP smart objects (especially in M2M applications).
Another approach is OneM2M which is a common software service layer based on RESTful resource oriented API. Open Data Protocol (OData) [
61] is an open protocol that defines a complete architecture, from RESTful web services to a data model for information exchange (using XML or JSON formats).
Ontology-based approaches try to model the characteristics of the system. Ontologies are used to provide a formal naming for type and properties definition and entities interrelationship for a particular domain. The Resource Description Framework (RDF) [
62] that is used to define and establish relations between documents. RDF can be extended with standard “ontology vocabulary” and providing metadata about resources that represent objects. In addition, Ontology Web Language (OWL) [
63] provides more concepts to express meaning and semantics than the basic RDF.
A concrete and specially adapted solution for IoT is SensorML [
64]. It provides a XML-based model for describing sensors and measurement processes. SensorML is one of the most commonly used ontology-based solutions in the IoT and Web of Things (WoT) [
65].
Semantic Sensor Network Ontology (SSN) [
66] offers an ontology that defines the capabilities of sensors and sensors networks. It is based on other standard ontologies as Sensor Model Language (SensorML) and Observations and Measurements (O&M). Another approach like the Internet of Things Architecture (IoT-A) uses Semantic Web techniques requiring that information meaning is formally defined. It is based on the use of representation languages as RDF schema and Web Ontology Language (OWL). It identifies entities, resources and services as key concepts within the IoT domain.
X-GSN [
67] is an XML-based language that allows defining and describing sensors with semantics that can be interpreted and managed later. Finally, Machine-to-Machine Measurement (M3) [
68] is a framework to semantically annotate and easily interpret IoT data.
5.5.5. DEWI L2 Technology
DEWI has selected a RESTful solution as final L2 communication protocol based on HTTP/HTTPS for transport and JSON/UDDI as message format/resource discovery. A set of API functions have been released to the members of the project to achieve interoperability between DEWI Bubbles of different domains. The information model of the selected L2 technology is given in
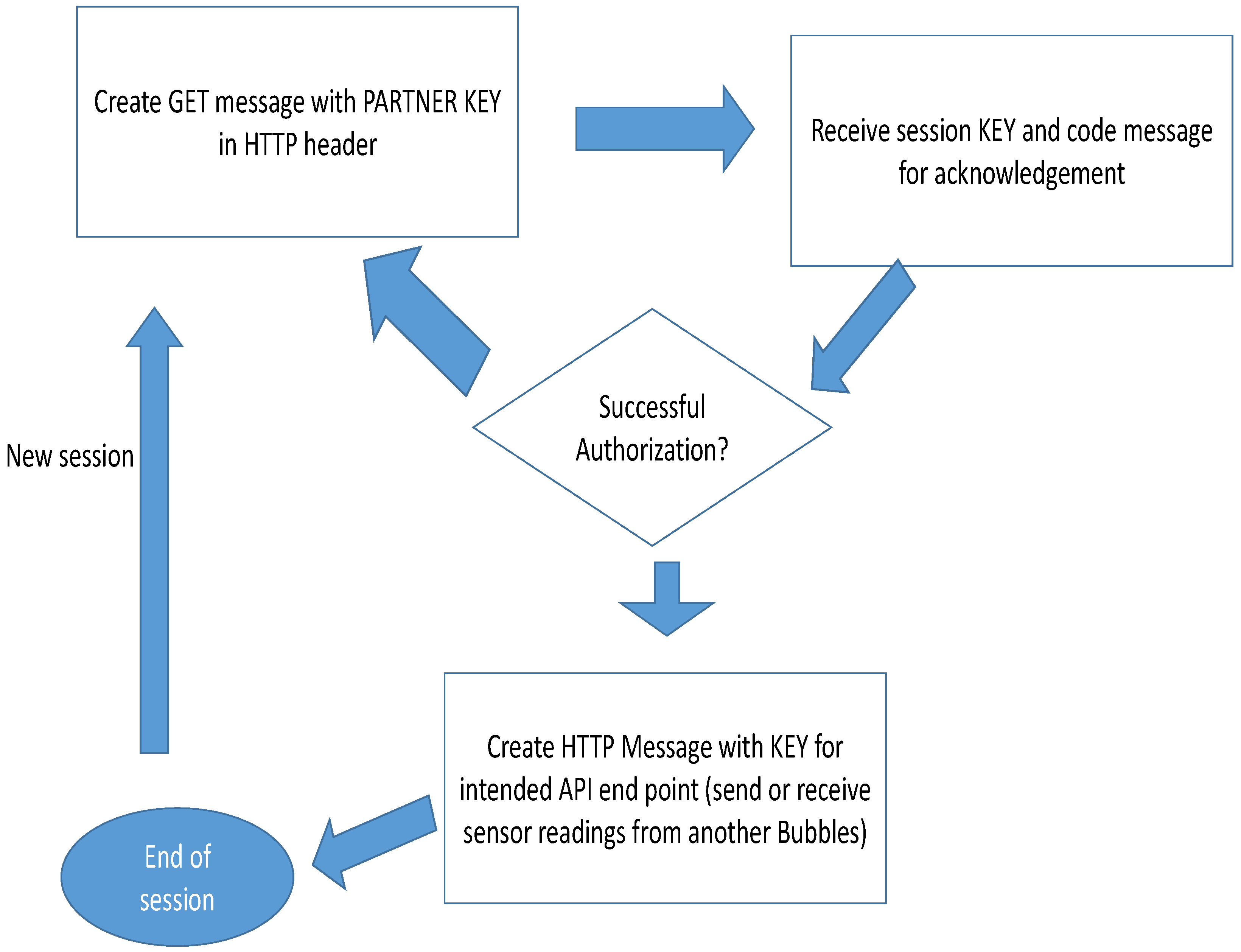
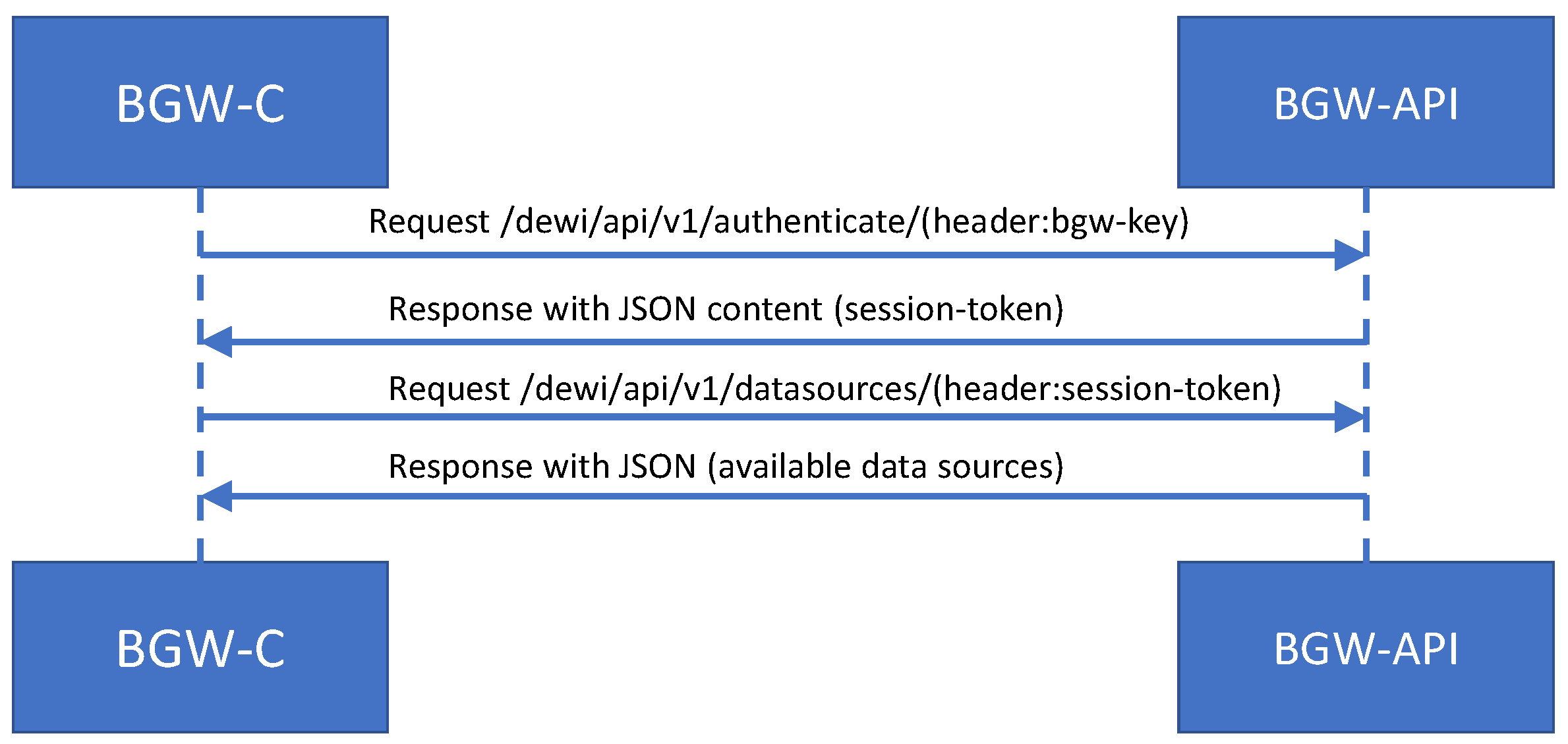
Figure 13. The guidelines for using L2 are broadly summarized in
Figure 14. An example of the interactions between two DEWI L2 entities using L2 communication is given in
Figure 15. L2 allows external clients to access the information of different DEWI Bubbles in different industrial domains. The solution also has security features for authentication and encryption based on key generation/distribution.
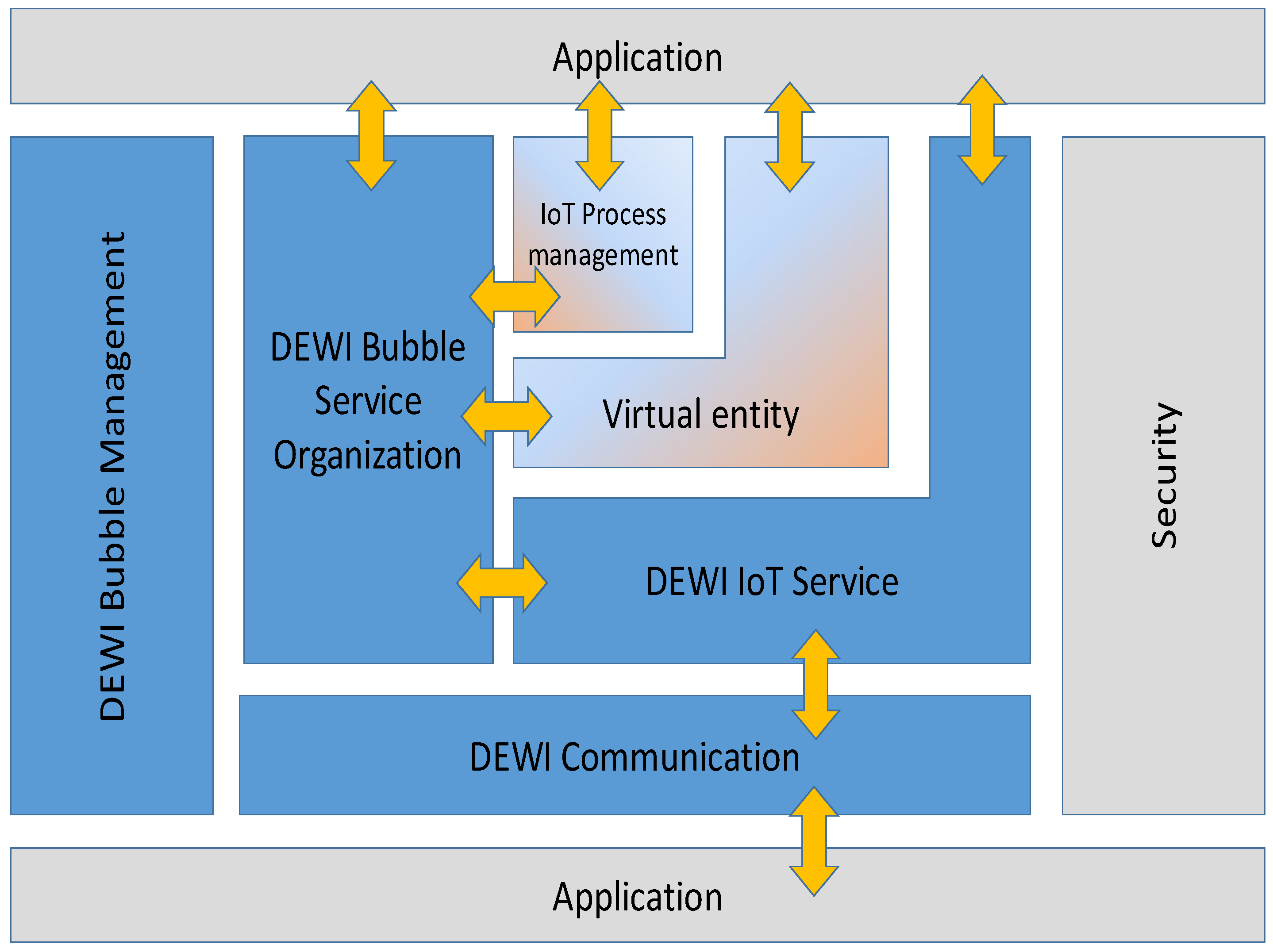
6. Functional Model
6.1. Overview
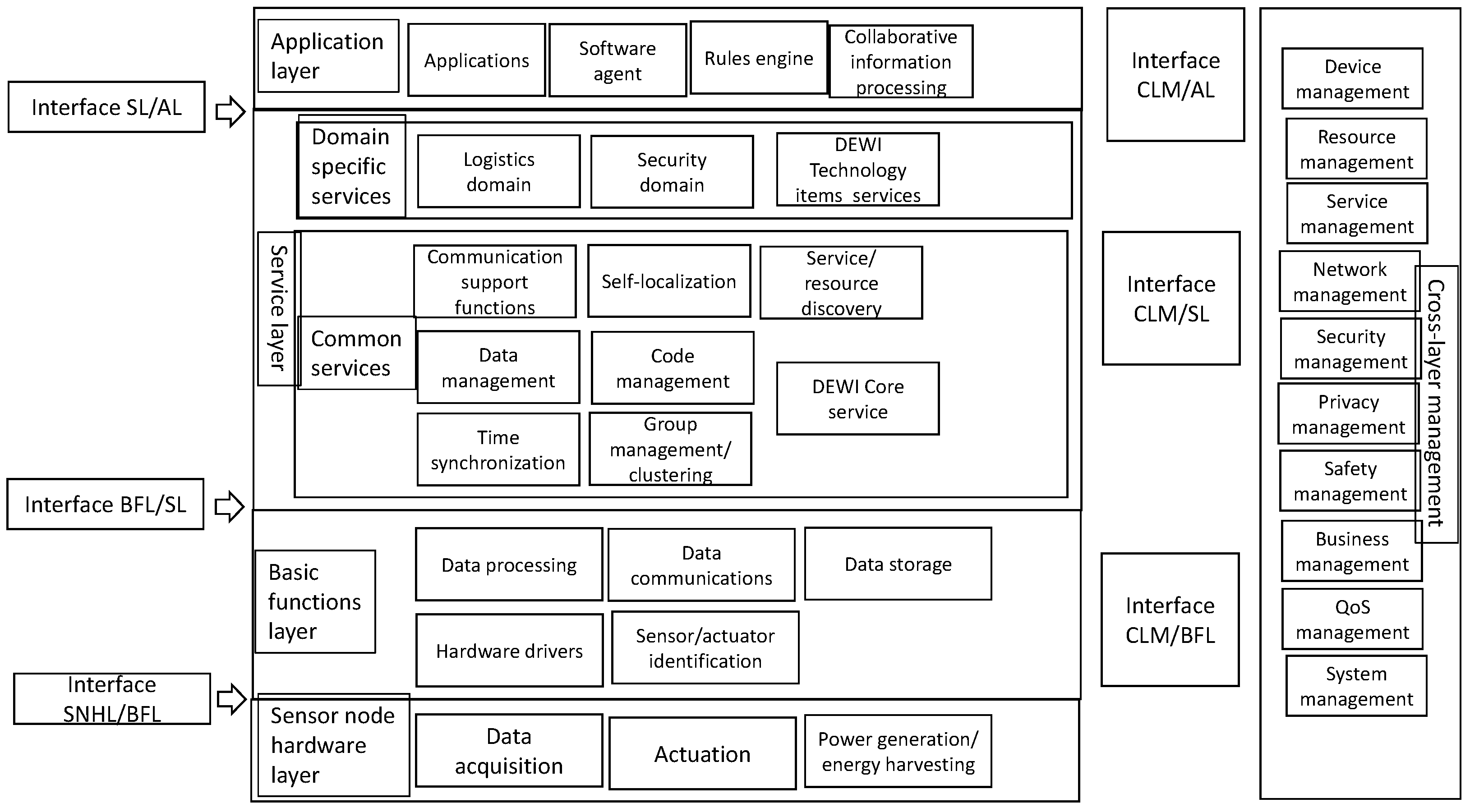
The DEWI HLA functional decomposition model is an extension of the functional model of the ISO/IEC SNRA in [
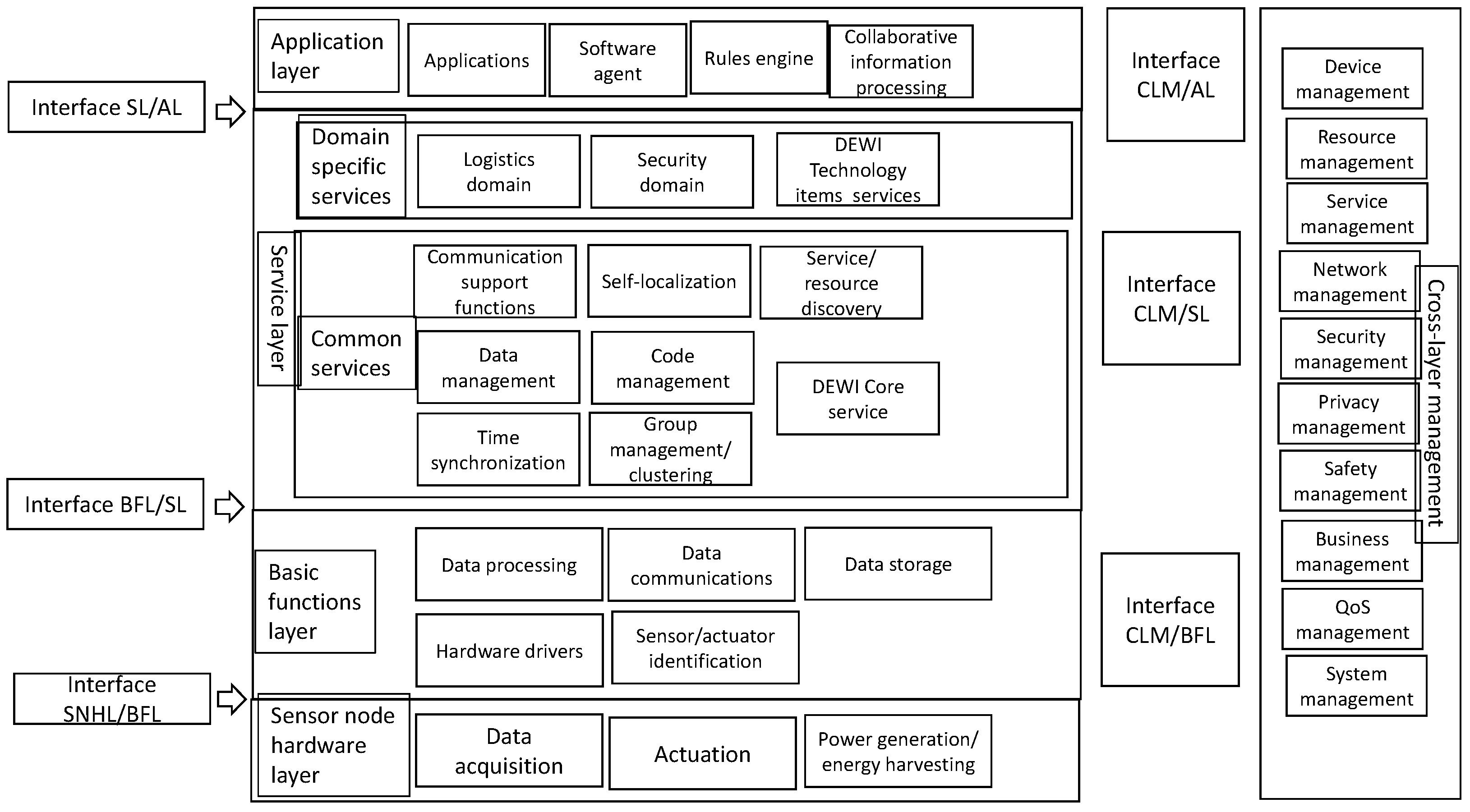
11]. The benefit of this functional decomposition model is the simplification of system analysis by breaking global tasks into basic functionalities easier to manage and easier to insert into global system design. Following the ISO SNRA standard, the DEWI functional components are organized into four layers plus one cross-layer and cross-domain management. These layers are displayed in protocol stack view in
Figure 16. The mapping of the the DEWI HLA to the ISO/IEC SNRA is shown in
Table 9.
6.2. DEWI Node Hardware Layer (DNHL/SNHL)
The DEWI Node Hardware Layer (DNHL) or Sensor Node Hardware Layer (SNHL) encapsulates the low-level device functionalities that are common to all DEWI nodes. These functions are: sensing, actuation and energy harvesting. Therefore, the DEWI NHL is in charge of the interface between the virtual world of computing and the physical world of objects, via measurements of physical phenomena. Sensors are used to measure physical quantities. Actuators are used to change a physical quantity in response to a signal or command. Energy harvesting is used to obtain energy from the surroundings of the DEWI Node and extend battery life. In DEWI, dependability can be improved using the technology item of ruggedized hardware.
6.3. Basic Function Layer (BFL)
The Basic Function Layer (BFL) contains the basic functionalities to transport, process and store the data generated by the SNHL. Physical entities may also make use of an operating system that is able to manage the computational resources and provide a simple language for applications to have access to such resources. BFL functionalities include: Operating system (OS), data communication, data storage, data processing, sensor/actuator/device identification and device drivers management.
6.4. Service Layer (SL)
The Service layer (SL) is in charge of providing upper layers with the application programme interfaces (APIs) that encapsulate all the lower functionalities of a sensor network. The SL acts as an interface between the application and the basic functions, and it helps to speed up the development and deployment of applications. The DEWI SL includes services specific of each domain, particularly services related to the TIs.
6.5. DEWI Core and Technology Item Services
The DEWI Bubble L2 uses a service oriented architecture with particular services that are called here core services. These services depend on the architecture and middleware approach to be used. The DEWI TI services aim to enable the update, retrieving and uploading of technology innovations developed in each use case. The profile repository stores details of the TIs communicate with different DEWI Bubbles to proceed with TI operations.
6.6. Application Layer (AL)
The AL uses the services provided by the lower layers, but it is completely insulated from the details of the network hardware. It describes how applications interact with the network operating system. This interface is commonly known as an API. Common application components are the software agent, the rules engine and collaborative information processing. An agent is a piece of code that runs continuously. It can run tasks by itself, react to events on the Bubble and communicate with other agents. A rules engine is a software system whose behaviour is determined by a set of high-level business rules. Business rules can be inference rules, very much like an if-then statement that is called manually, or reaction rules that executes a program when an event is detected.
6.7. Cross-Layer and Cross-Domain Management (CLM/CDM)
Layered design has been the staple in the evolution of modern telecommunication networks. However, the layered model started to show some shortcomings, particularly in wireless networks where layers are tightly connected to each other. A wireless network should be designed by using cross-layer concepts, where parameters and issues across different layers must be addressed or optimized simultaneously. In the DEWI HLA, the layers of the functional model are able to exchange information and allow cross-layer design and optimization. A key concept in the DEWI HLA is cross-domain application development. Thus, in addition to the cross-layer management, cross-domain allocation is also incorporated. Typical cross-domain use cases include supply chain applications where goods are transported by trucks, planes and trains, while stored in warehouses and offices. This covers different industrial domains. CLM/CDM functionalities include device, resource, QoS, dependability and security management.
9. High Level Requirements (HLRQs)
The mapping of high level requirements to the DEWI architecture is shown in
Table 11. The HLRQs are described in the following subsections.
9.1. WSN Self-Configuration
The DEWI HLA must allow self-configuration. The layered and functional model of the HLA can meet implicitly this requirement for Level 0 and Level 1. This means that use cases can deploy their own solutions in both levels of the architecture to enable self-configuration. By comparison, in level 2, there is an explicit use of a profile database where DEWI Bubbles are able to retrieve configuration parameters of the domain and reuse technical solutions created in other use cases of within the same or from other domains.
9.2. Resilience
Resilience was mainly based on each use case implementation. This lies mainly in Level 0 of the architecture. Some use cases might also employ resilient solutions for Level 1. However, these solutions are already existing in most of the use cases.
9.3. WSN Availability, Reliability and Quality of Service
This requirement is closely linked to the concept of dependability, which is central in the DEWI HLA. These requirements have been considered in the definition of Level 0 and particularly Level 1. We recall that Level 1 is connected to the existing infrastructure of each use case, and that such infrastructure in the majority of cases is real time and highly reliable. Therefore, each use case has investigated the best way to design Level 0 (wireless links) to match the reliability and quality of service features of many of the L1 technologies.
9.4. WSN Self-Organization, Path Diversity and Differentiated Traffic Management
By definition, the DEWI HLA supports advanced management schemes such as differentiated traffic management and self-organization in the two first levels of the architecture. The top level (Level 2) has been in principle designed as a non-real time request–response and service oriented architecture. This means that Level 2 has been simply used for occasional access and request to the DEWI Bubble services by other Bubbles or by external users.
9.5. Latency
Latency is an important metric in real-time industrial applications. By definition, the DEWI HLA supports latency constraints up to Level 1. Level 2 is not currently designed to support delay-sensitive applications.
9.6. DEWI Wireless Range
Wireless range defines the physical space where the DEWI Bubble services are enabled. This requirement is directly linked to level 0, which is the intra-WSN technology. Some aspects of Level 1 might also affect the range of the DEWI Bubble, mainly by using interference control or context aware inter-WSN resource allocation (e.g., spectrum power and transmissions allocation).
9.7. Bi-Directional Communication
Bi-directional communication is a requirement mainly needed in Level 1 and Level 0. This requirement encapsulates the need to establish a two-way communication channel with DEWI Nodes. In Level 2, bi-directional communication is usually achieved by the IP infrastructure, so it is not considered a requirement in the design of the HLA L2.
9.8. DEWI Bubble Security
There is a need to provide secure DEWI Bubble services. As observed with TIs, security is required for all levels of the architecture. Each level, however, might have different requirements and different constraints to consider in the design.
9.9. DEWI Bubble Concept Architecture
All the levels of the HLA have been designed according to the DEWI Bubble concept and its architectural principles.
9.10. Coexistence
One of the main driving factors in the design of the DEWI HLA is coexistence. Coexistence is mainly addressed at Level 0, where the aim of the DEWI Bubble is to ensure coexistence between different wireless transmission technologies. However, Level 1 and Level 2 can also be regarded as enablers of the coexistence at Level 0, mainly by providing management allocation and interoperability between heterogeneous wireless/wireline technologies.
9.11. Packet Oriented Protocol
The DEWI HLA supports mainly packet oriented protocols. In those cases where existing wireline technologies do not support packet based transmissions, the DEWI Gateways provide protocol conversion and data translation. This is a development particular to each use case.
9.12. WSN Model
Each layer of the HLA has been mapped to the functional model of DEWI, which in turn is based on the functional model of the ISO reference architecture. The DEWI HLA has also been mapped to the INTEROP interoperability architecture framework, which provides different models and visions of the DEWI Bubble and the WSNs inside the Bubble.
9.13. Node Localization
The DEWI HLA complies with the ISO reference architecture, which includes the functionality of node localization. This functionality mainly lies in Level 0 of the HLA.
9.14. Synchronisation
Synchronisation is a requirement that by definition of the DEWI HLA can be met in Level 0 and Level 1 of the HLA. Level 2 provides asynchronous message-based (request-response) access to DEWI Bubbles, which is inherently not synchronous.
9.15. Time Stamp
Time stamps are to be used in some sensor applications that require knowledge of timing between sensor events, such as data fusion algorithms. Therefore, time stamps are supported in the HLA mainly in Level 0 and Level 1. Some applications of Level 2 might have access to time stamp information. However, this has to be defined in the configuration profile of each DEWI Bubble.
9.16. Data Fusion Features and Performance
Data fusion algorithms are intrinsically supported by Level 0 and Level 1. Level 2 is not expected to support these functionalities. SCOTT project deals with cloud computing aspects for data fusion in L2.
9.17. Adaptable WSN
Adaptation in wireless sensor networks is intended to counteract the random behaviour of wireless propagation channel and the traffic load in the network. Therefore, this requirement has been mainly addressed by Level 0 and Level 1.
9.18. Node Energy Management
The DEWI HLA supports advanced node energy management. This is a necessary feature for WSNs to become more cost-effective than their wireline counterparts. Energy management is supported by the DEWI HLA at Level 0 and Level 1. It is possible that Level 2 applications enable some further benefits in terms of energy consumption, mainly by cross-optimizing resources and spectrum across contiguous DEWI Bubbles and reducing interference.
9.19. Scalability of Solutions
The DEWI HLA has been designed by keeping in mind scalability. Layered models are conventionally used to provide a more flexible organization of resources, thus allowing for comprehensively scalable solutions. All use cases have reported in the project deliverables their individual scalability analysis.
9.20. General Ontology Definition
The DEWI HLA provides with ontology models for the definition of interoperability, cross-domain application development and technology component reusability. This ontology and interoperability model is based on the mapping of the DEWI HLA to the INTEROP interoperability architecture framework [
19]. The ontology model allows abstraction of high level DEWI level 2 functionalities for DEWI Bubble services and applications without the need to define platform and system dependent models. This provides DEWI with great flexibility in terms of being able to reuse existing service oriented architectures (mainly developed in the context of the Internet of things) and develop a DEWI overlaid ontology solution. The DEWI high level language reflects the features of the project and allows for cross-domain application development.
9.21. Data Access Interfaces and Node Abstraction
The DEWI HLA layered model aims to provide with data access interfaces encapsulated in the DEWI Bubble Services. The DEWI APIs developed across use cases enable different users (external or internal) to have access to node information or to a virtual representation of the DEWI Nodes. This requirement is supported in the three levels of the architecture.
9.22. Robust Operation
Robust operation is central to the objectives of DEWI. Robustness has been favoured in the two lower levels of the architecture, which hold the main dependability and reliability requirements in the architecture.
9.23. Debug, Installation, Setup and Maintenance
These requirements will be supported mainly in Level 0 and Level 1 of the HLA.
9.24. OTA Programming
Over the air programming is mainly supported in Level 0 and Level 2. DEWI Level 2 supports the use of profile repository where configuration parameters, technical solutions and software modules can be accessed by DEWI Bubbles of different domains. This means that DEWI Bubbles can select on the fly different technology components when convenient, thus realizing the feature of technology reusability in the project.
9.25. Node Identification
Identification is supported in some use cases of the HLA, particularly in combination with RFID technology. Identification of nodes can be used to add further value and meaning to some applications. Security schemes based on context information (identification) can be used for example in supply chain management and logistic applications to detect potentially lost or misplaced items.
10. Use-Case Mapping
This section provides the explicit mapping of the different use-cases of the project to the layered model of the DEWI HLA. Additionally, each use case can be mapped to the other functional, interface and physical views of the architecture. For simplicity, here we focus only on the layered model mapping.
Table 12 provides the mapping of all use cases to the three-tier model, specifying the technology used for each level of the architecture. Three illustrative examples of the mapping of use cases to the HLA are displayed in
Figure 17,
Figure 18 and
Figure 19.
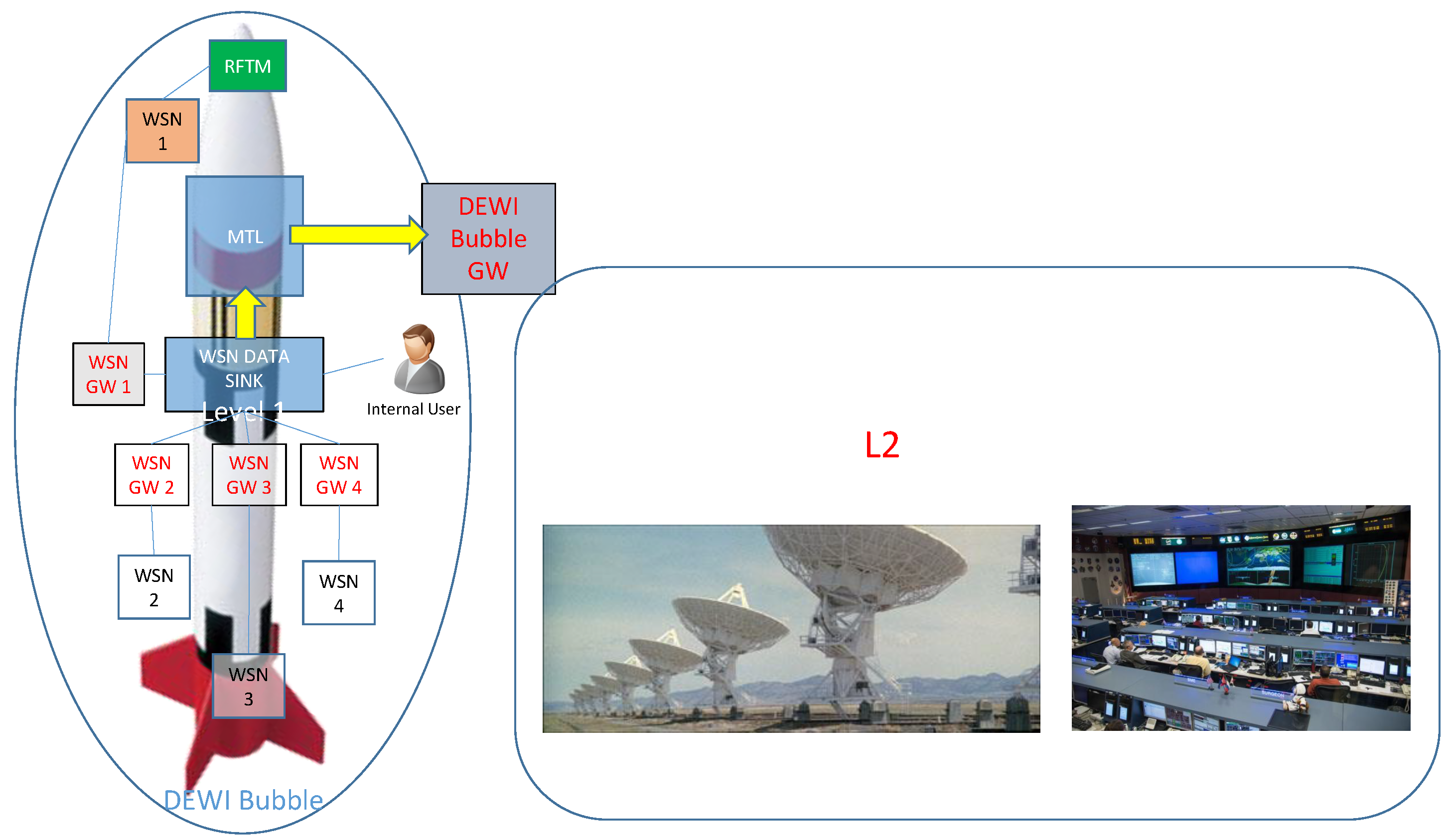
Use case 2.4 (
Figure 17) employs a highly ruggedized hardware WSN to monitor and control several aspects of an operational rocket. An actual physical rocket has been put into flight in military air space testing WSN technology on board. The subsystems controlled by the internal WSN include parachute control, direction and flight stabilization control, temperature monitoring and fuel consumption regulation. The Bubble gateway has been successfully tested in these challenging environmental conditions with extreme temperature, altitude and pressure. The Bubble Gateway was in charge of consolidating the data from different WSNs across the rocket and relaying the information to/from ground control.
Use case 2.5 (
Figure 18) also belongs to the aerospace domain. A highly dense network of sensors over the surface of the plane is used to track variations of pressure associated with turbulent flow formation or degradation of laminar conditions. The information is used to activate a set of actuators based on flow injection. Sensors and actuators are arranged in patches, internally wired, but connected via wireless to a gateway and to the central coordinator of the system on board. The WSN is therefore connected to the internal bus of the aircraft. The bubble gateway relays information to ground control.
Use case 3.8 (
Figure 19) uses distributed wireless sensor in a commercial truck. The wireless sensors replace several wired sensors commonly found inside a truck. These include tyre pressure sensors, fuel level sensors, etc. The sensors communicate the readings to a wireless gateway, which in turn communicates with a central controller through the internal network of the truck, in this case based on the CAN standard.
12. Conclusions and Future Work
This paper has presented a summary of the definition of the DEWI High-Level Architecture (HLA). The HLA aims to act as a reference framework for the design of wireless sensor and actuator industrial networks compliant with the concept of the DEWI Bubble. It offers a robust and interoperable framework to develop industrial dependable wireless solutions for monitoring and actuation. The DEWI HLA offers the versatility to be adapted to any kind of application/scenario requirements, and is agnostic to the underlying WSN technologies, becoming a powerful architecture for long-term industrial solutions. One of the main aspects achieved in this paper is the formalization of the entity model, the layered perspective of the entity model and the functional decomposition of the DEWI HLA, which is an extension of the ISO/IEC SNRA for industrial applications. The guidelines and analysis provided here are expected to be useful for the future integration of industrial WSANs into modern IoT, 5G, and Cloud Computing frameworks. The DEWi Bubble was here introduced with a simple but powerful three-layered entity model that allows for legacy and modern WSN technology to be integrated into existing industrial infrastructure of cars, trains, airplanes and buildings, and it also provides a flexible interface towards the IP and IoT worlds. Therefore, the Bubble concept provides a transition between legacy industrial wireless and wireline networks and new concepts such as the IoT, Big Data and Cloud Computing.
The DEWI project has paved the way for new project focused now on higher level issues such as security, safety, trust and privacy in the IoT. The project SCOTT (Secure COnected Trustable Things) [
27] builds on the results and on the architecture of the DEWI Bubble infrastructure to leverage the trust of IoT technology and boost its development and widespread use in the European industry. The project InSecTT [
28] provides the convergence between IoT and artificial intelligence using the DEWI and SCOTT approaches.



 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}