Choreographic Pattern Analysis from Heterogeneous Motion Capture Systems Using Dynamic Time Warping


 ,
,  , ,
, , 
Abstract
:1. Introduction
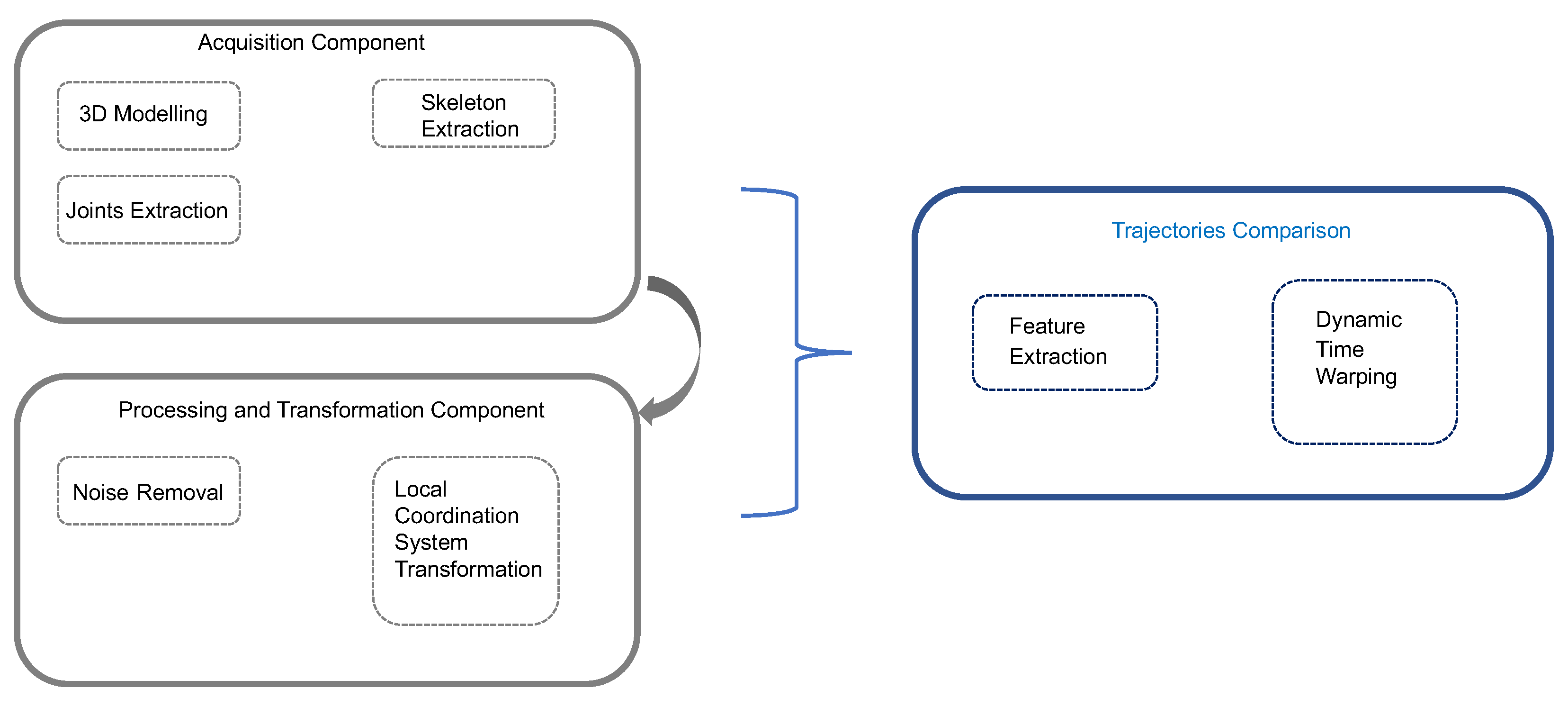
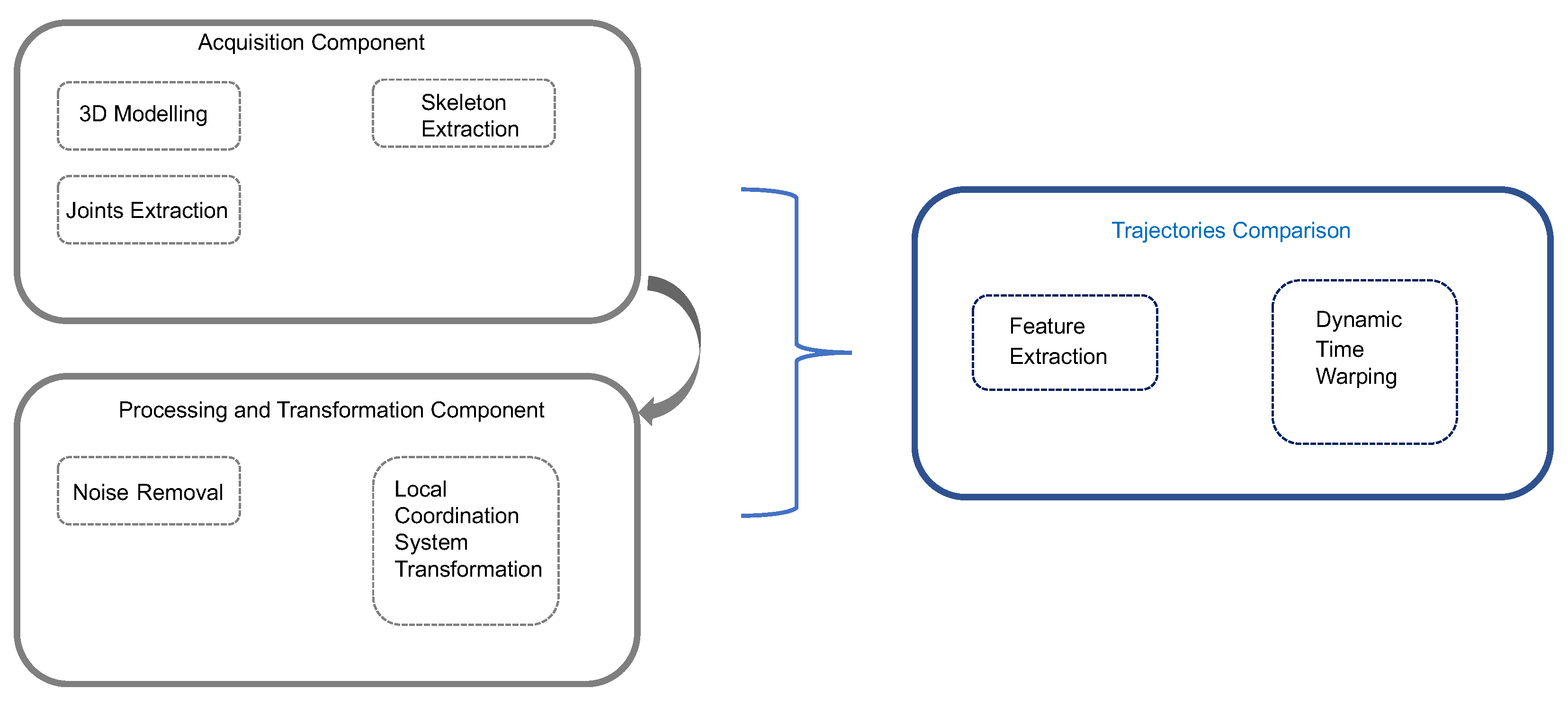
2. The Proposed Methodology
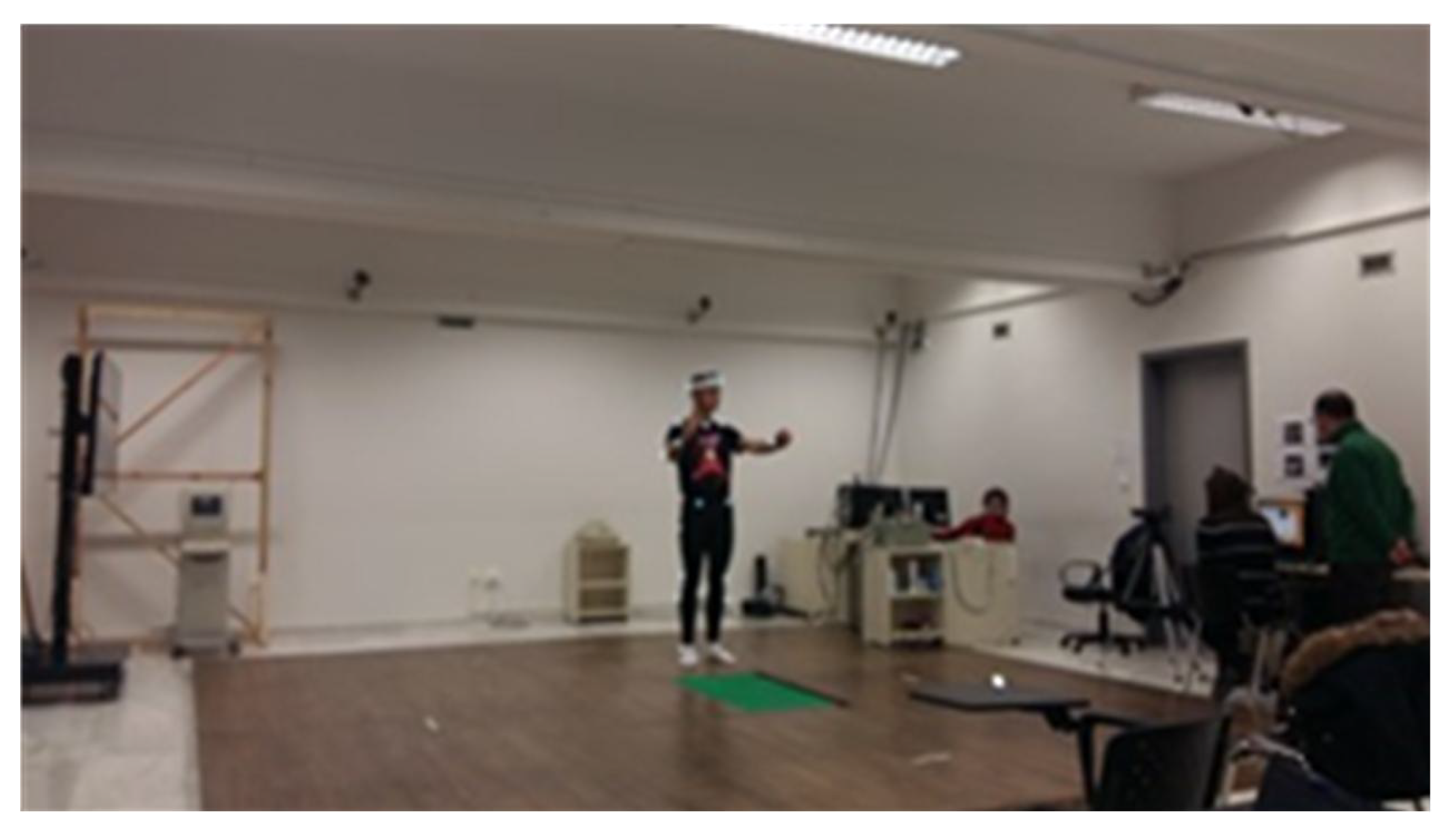
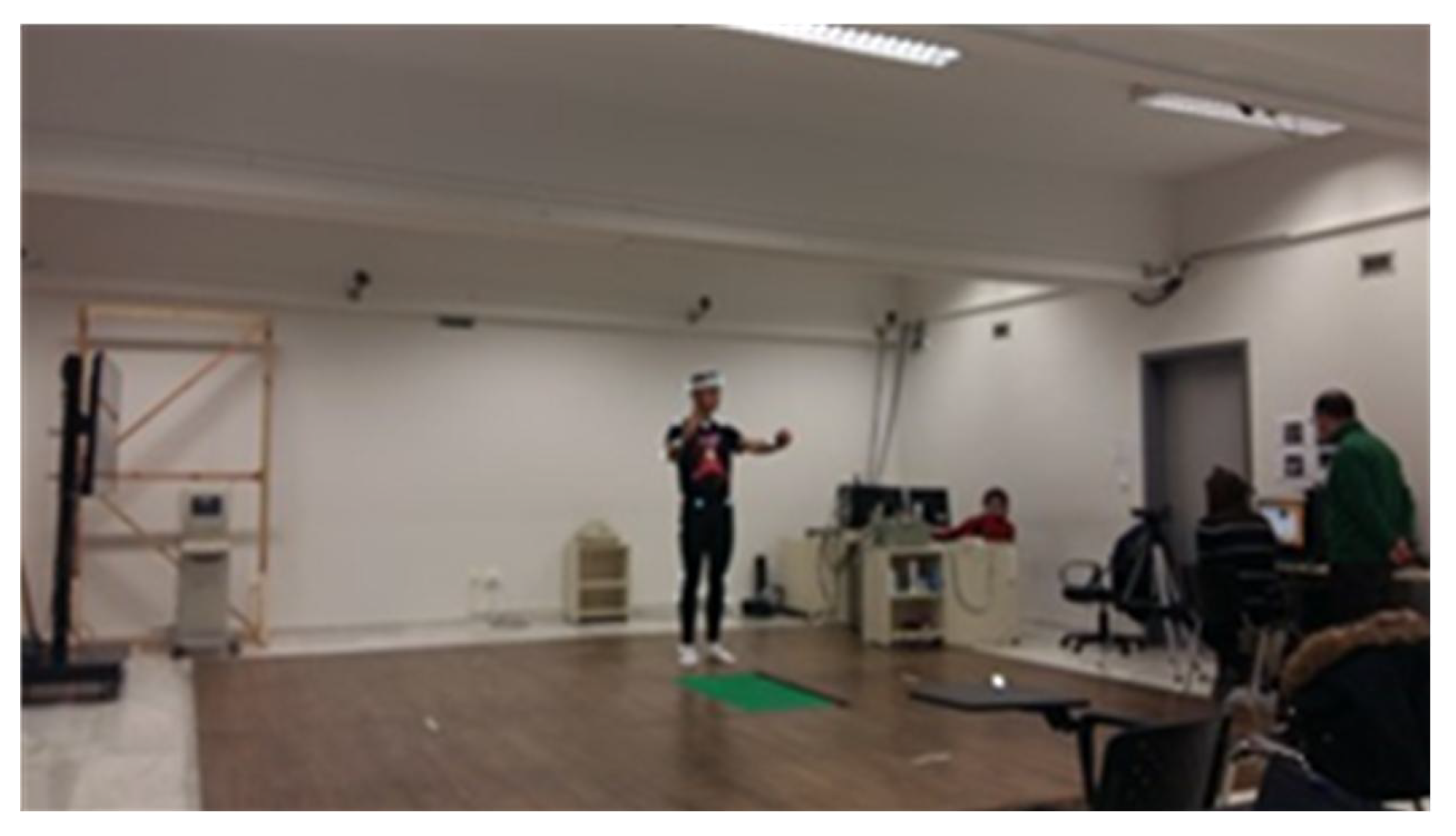
2.1. Data Capturing
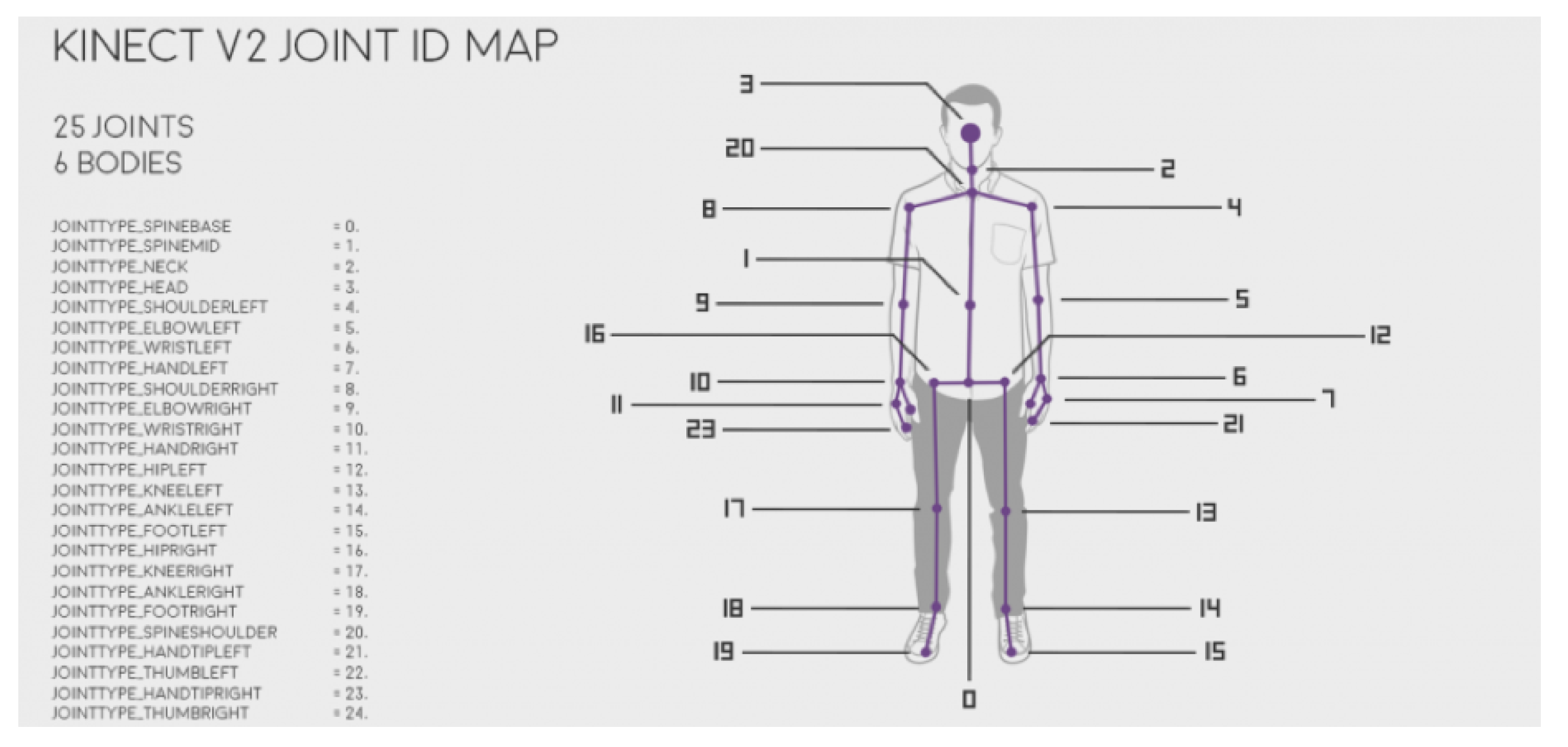
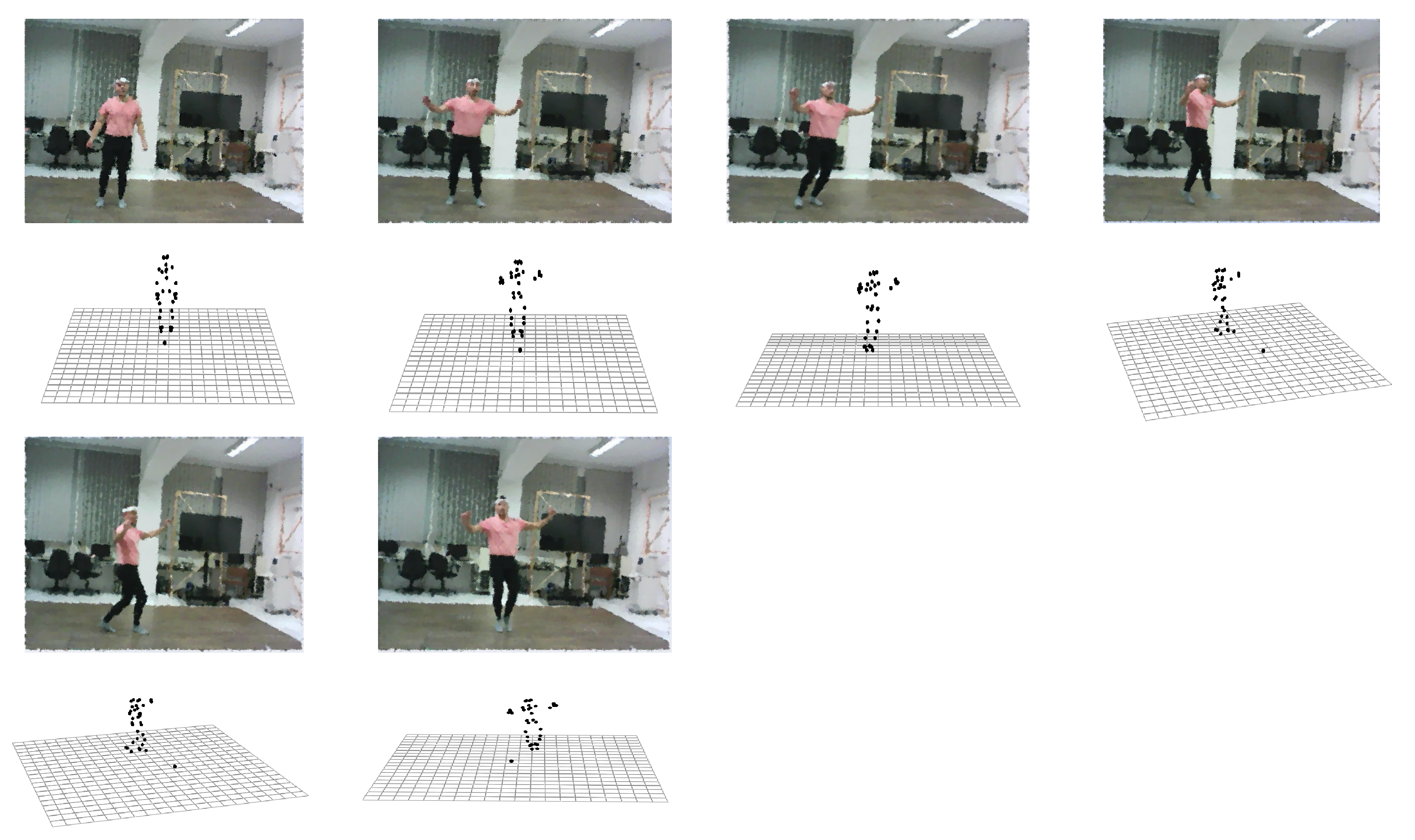
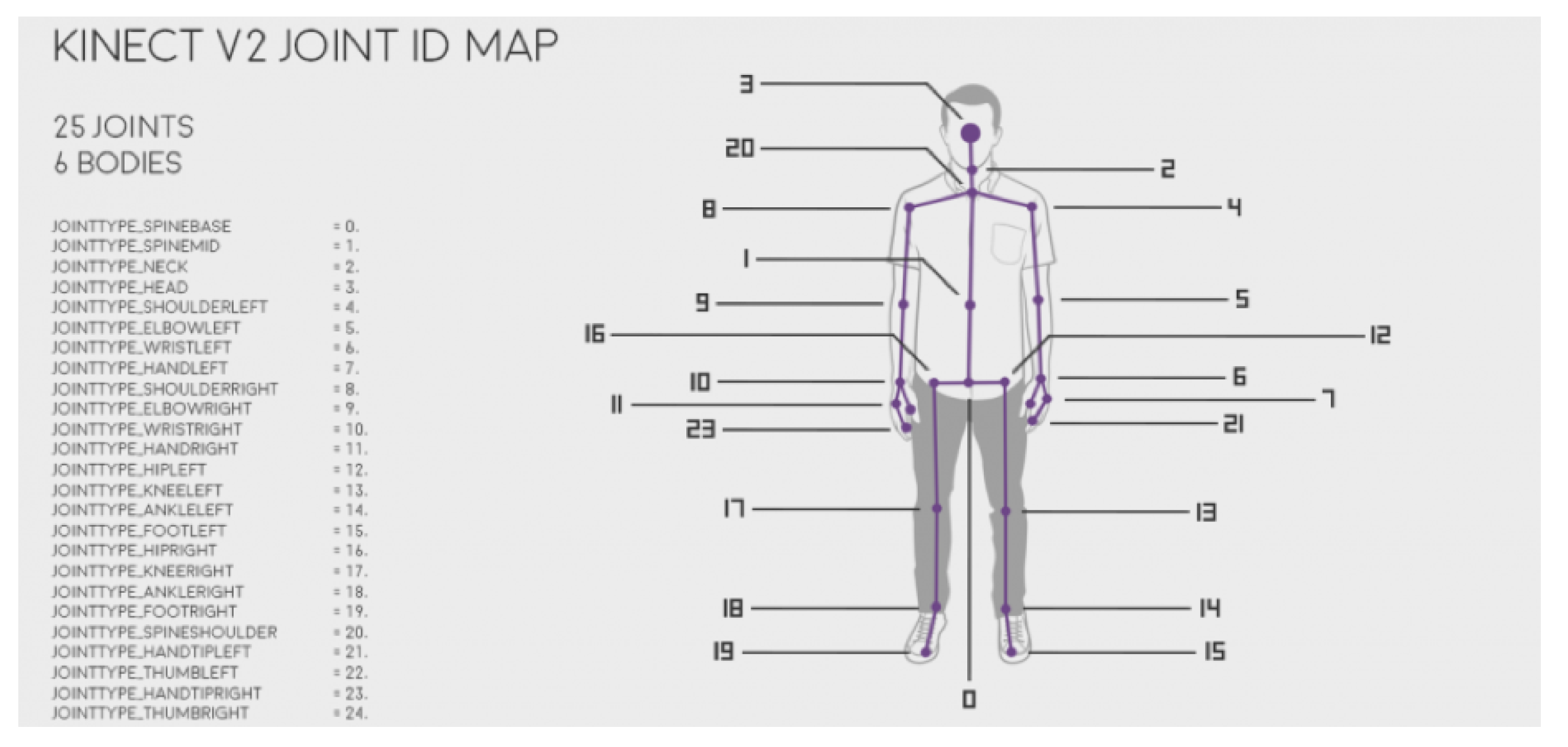
2.1.1. Kinect Sensor
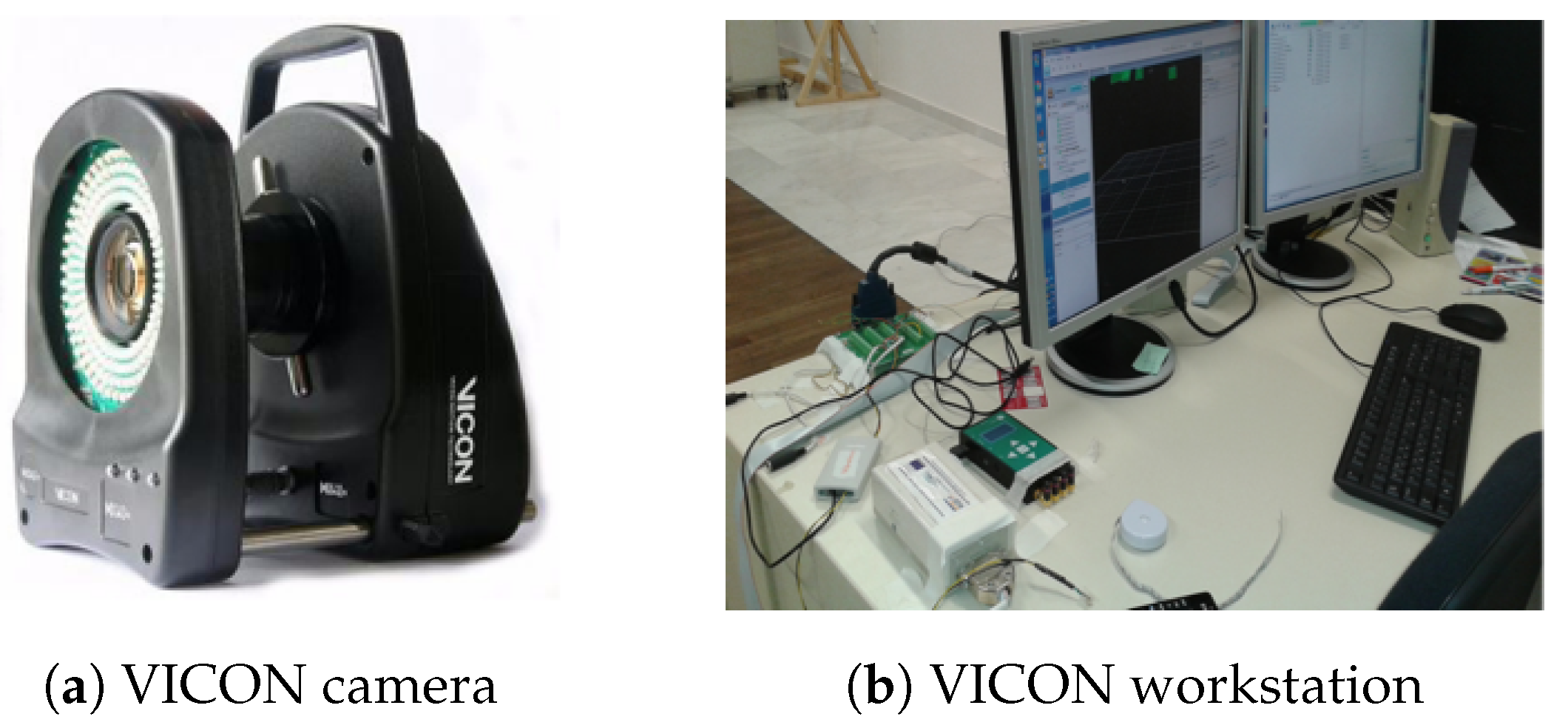
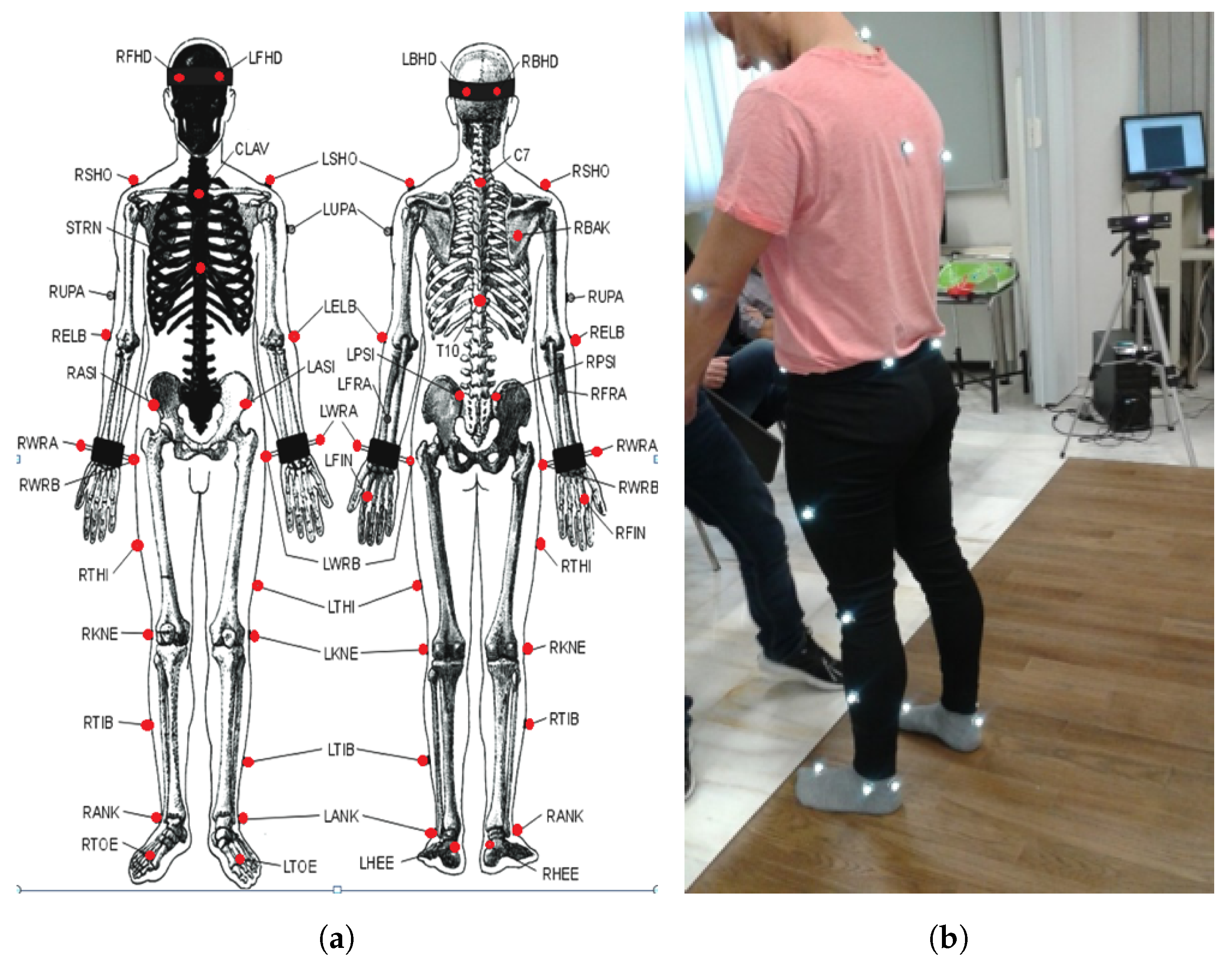
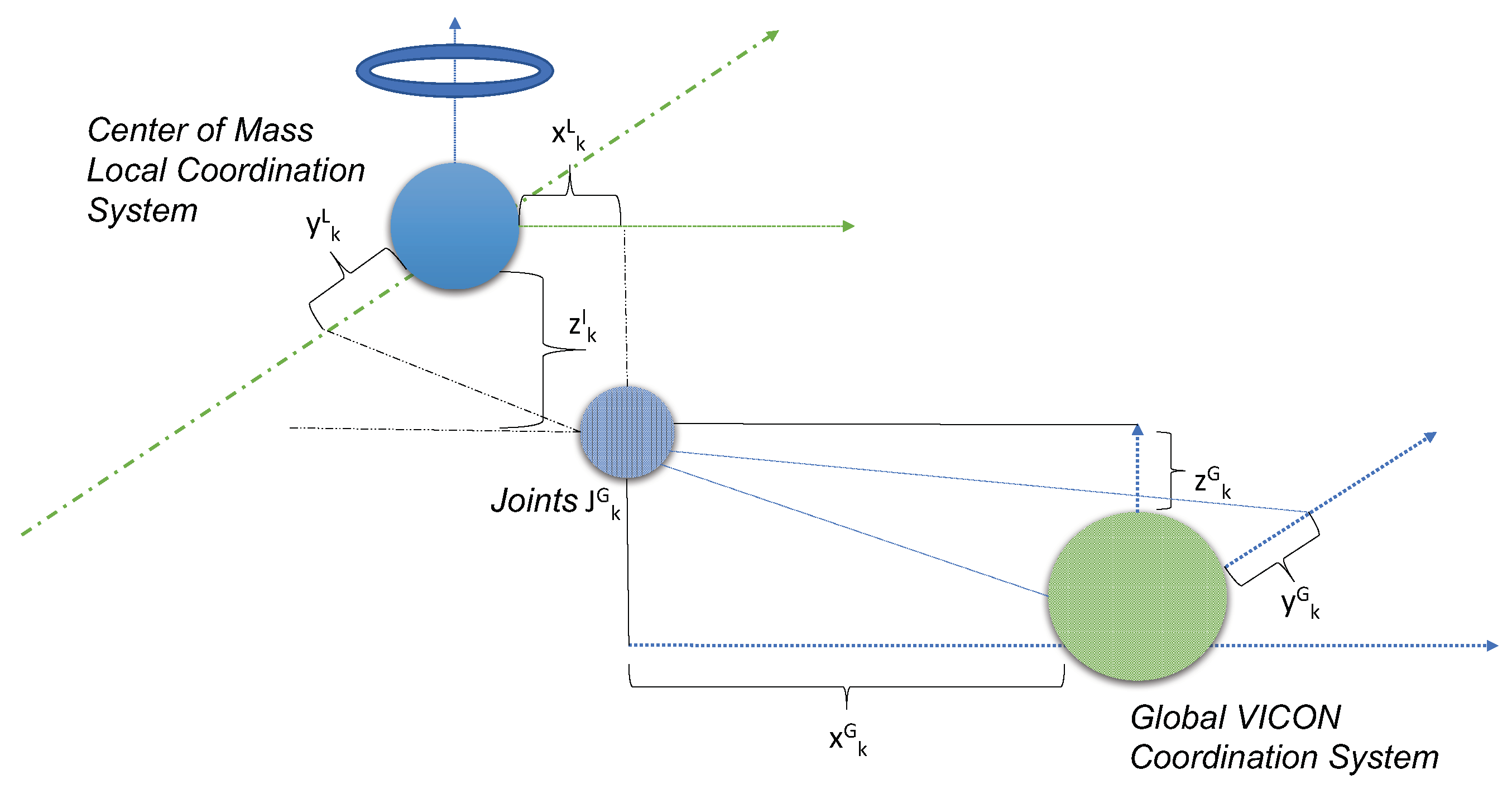
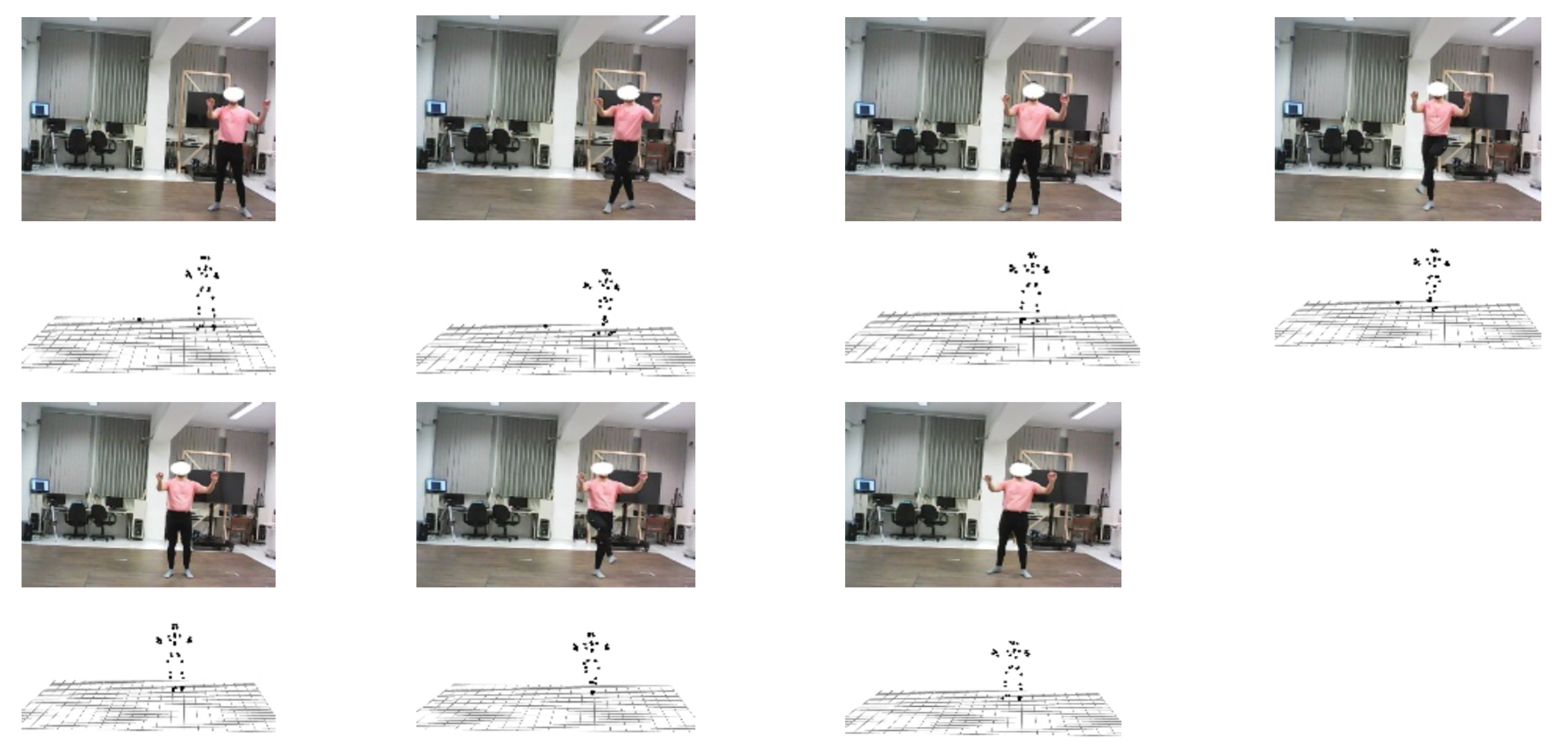
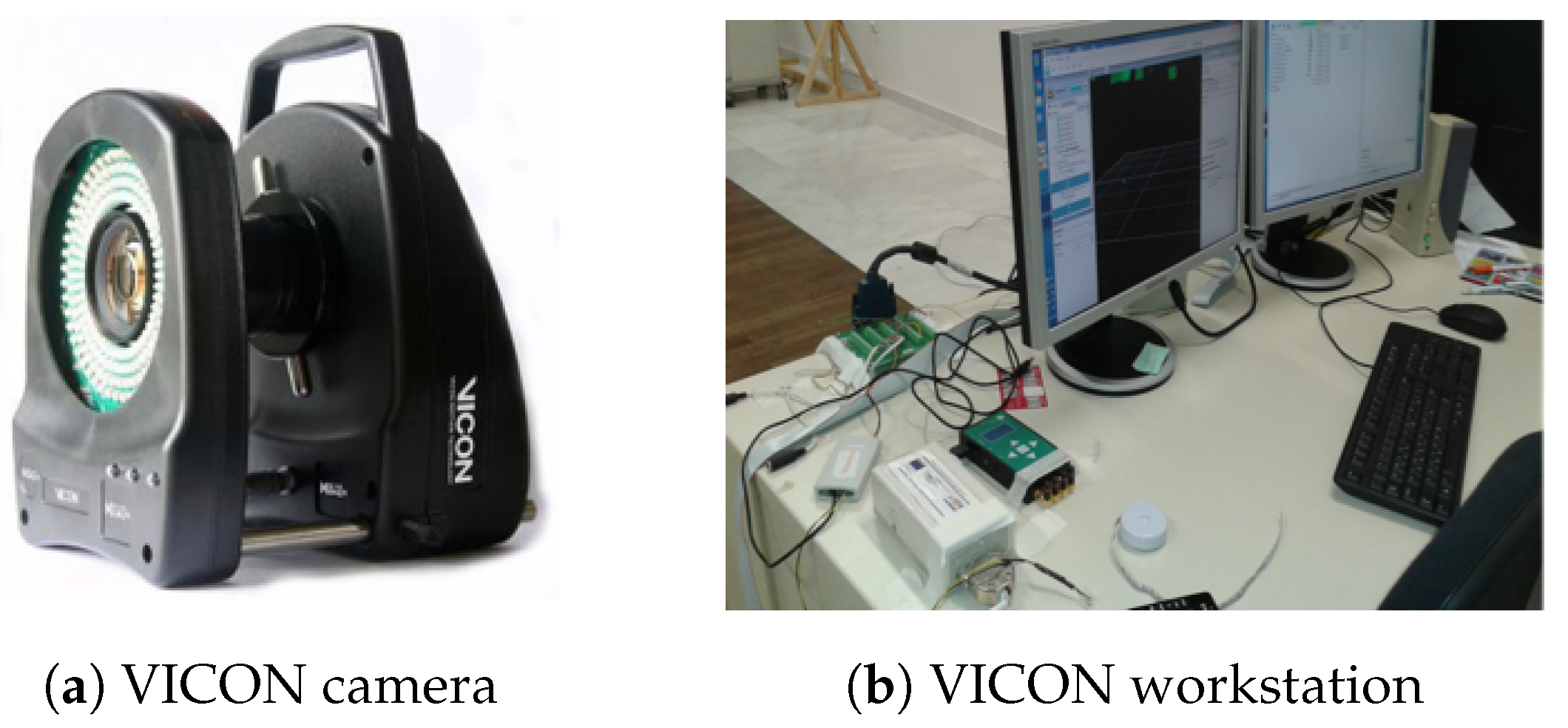
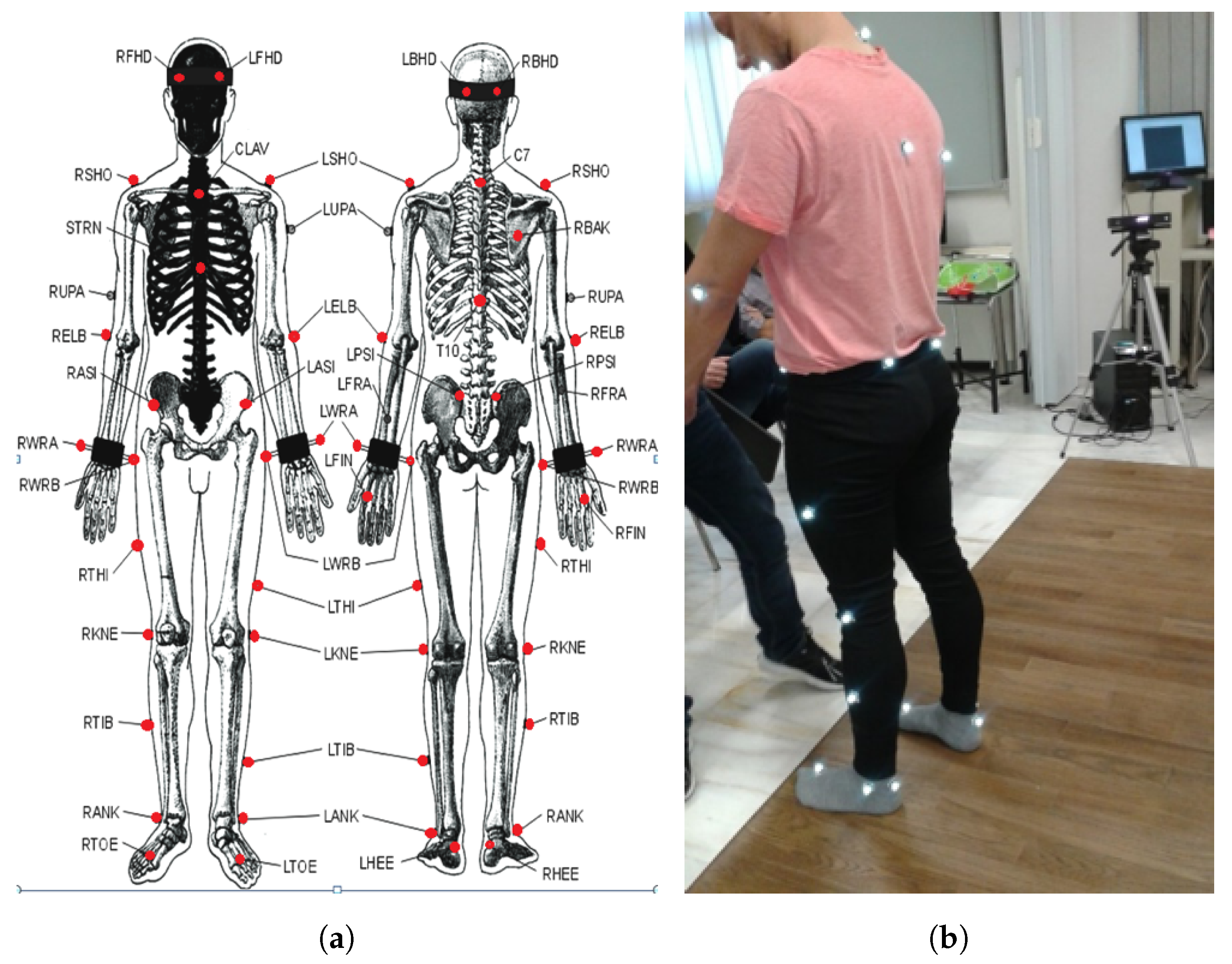
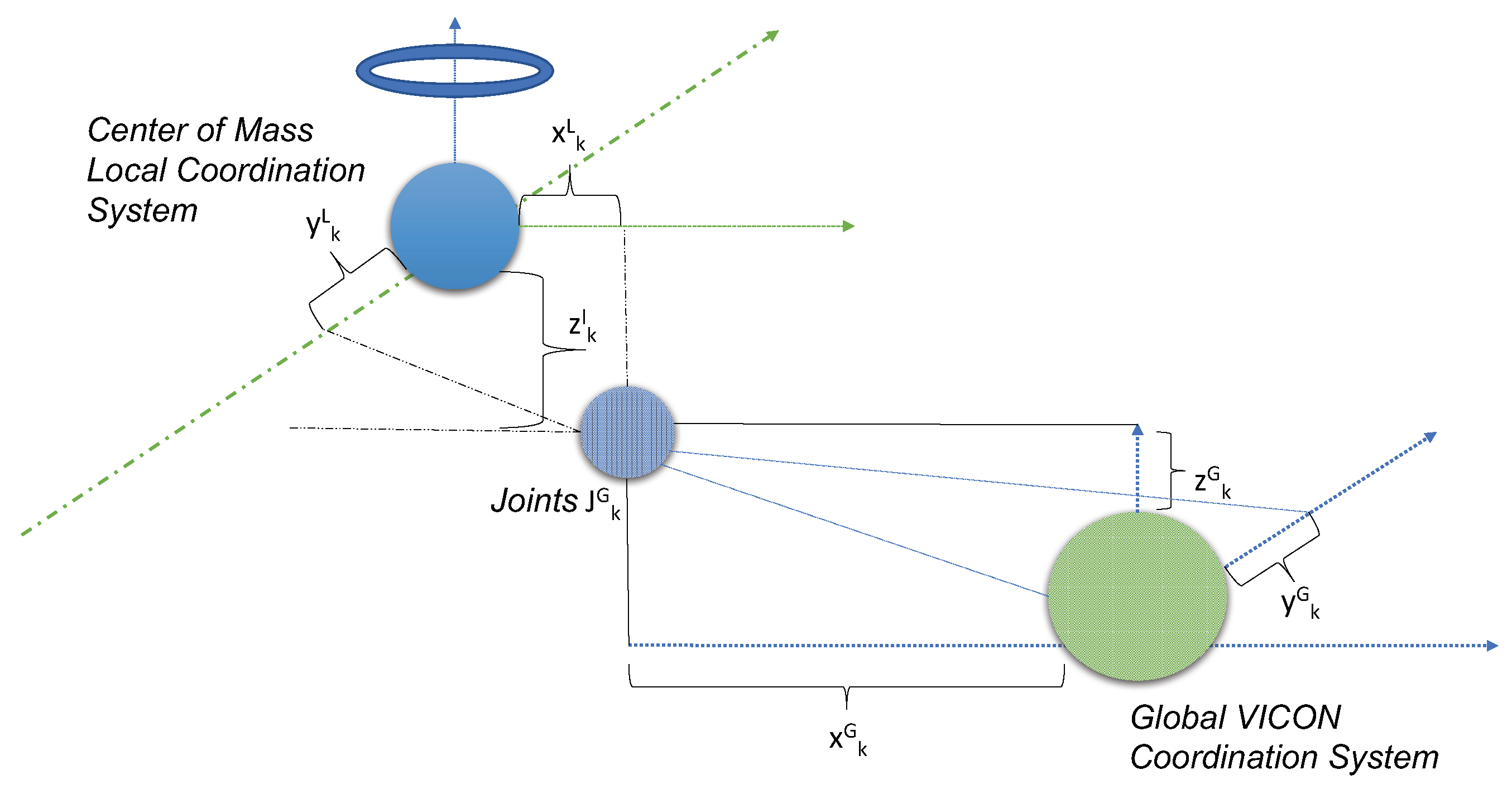
2.1.2. VICON Motion-Capturing System
2.2. Database Creation
3. Dynamic Time Warping for Evaluating the Kinect II Performance
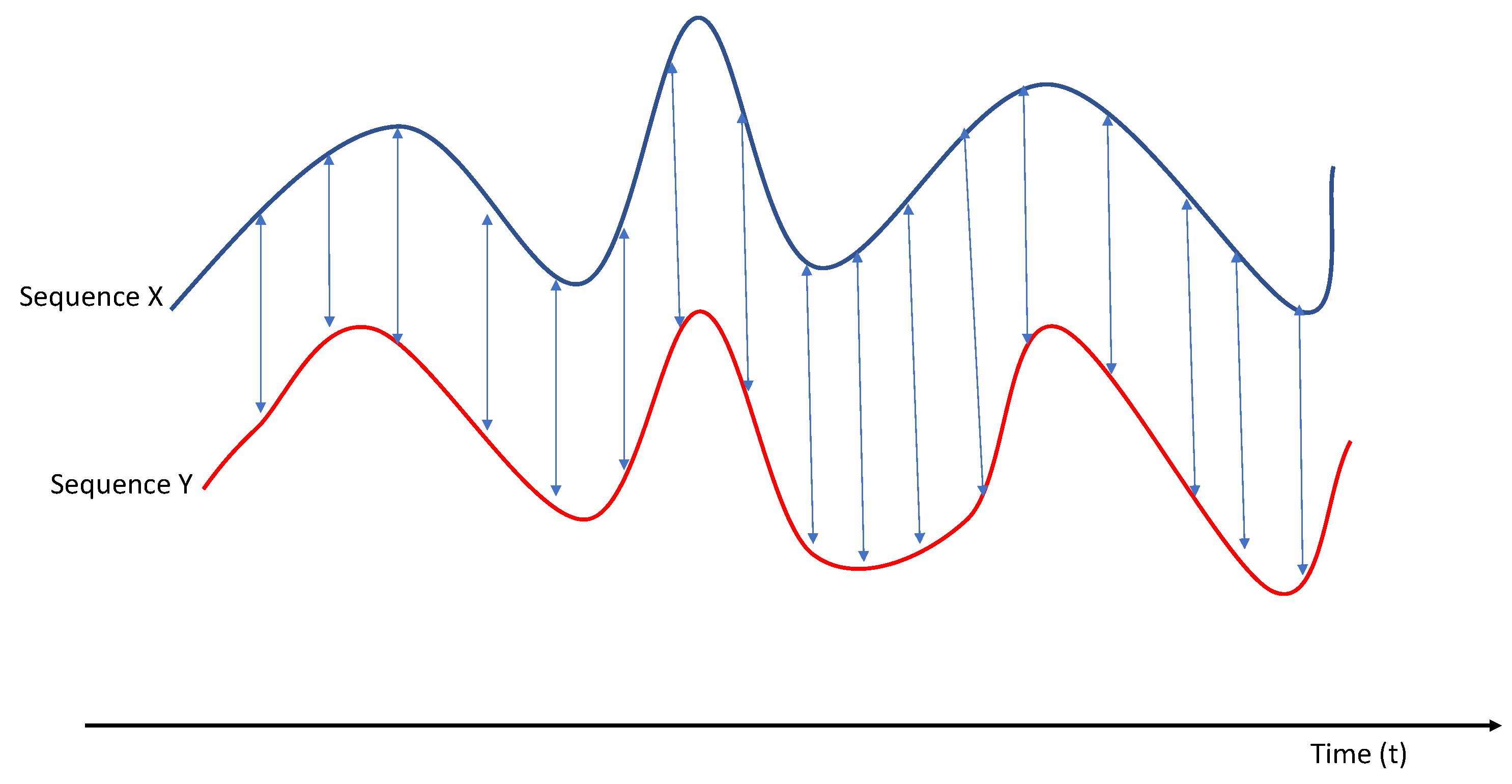
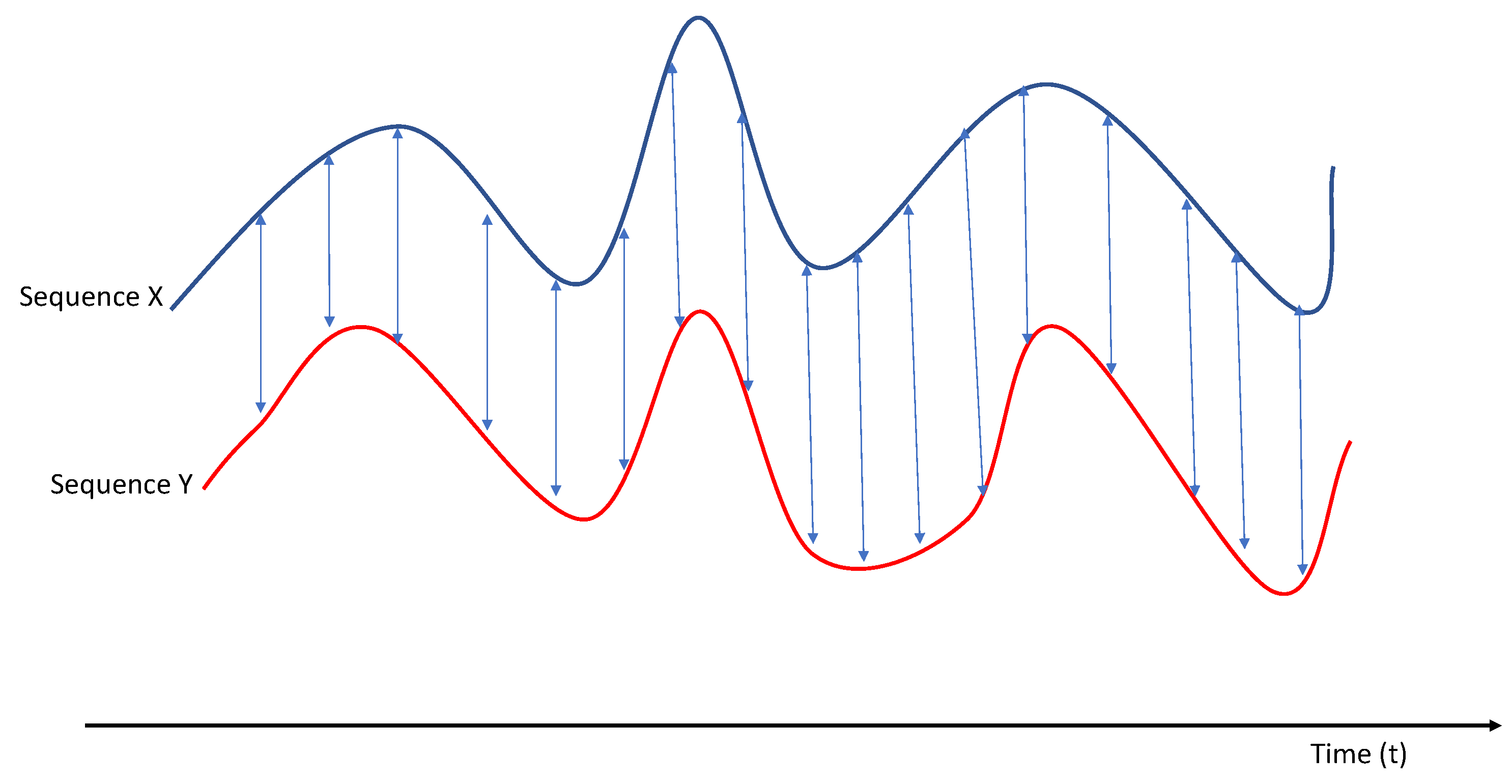
3.1. Dynamic Time Warping
3.2. Kinect II Evaluation Using DTW
3.3. Kinect II Evaluation Using Move-Split-Merge
4. Experimental Results
4.1. Dataset Description
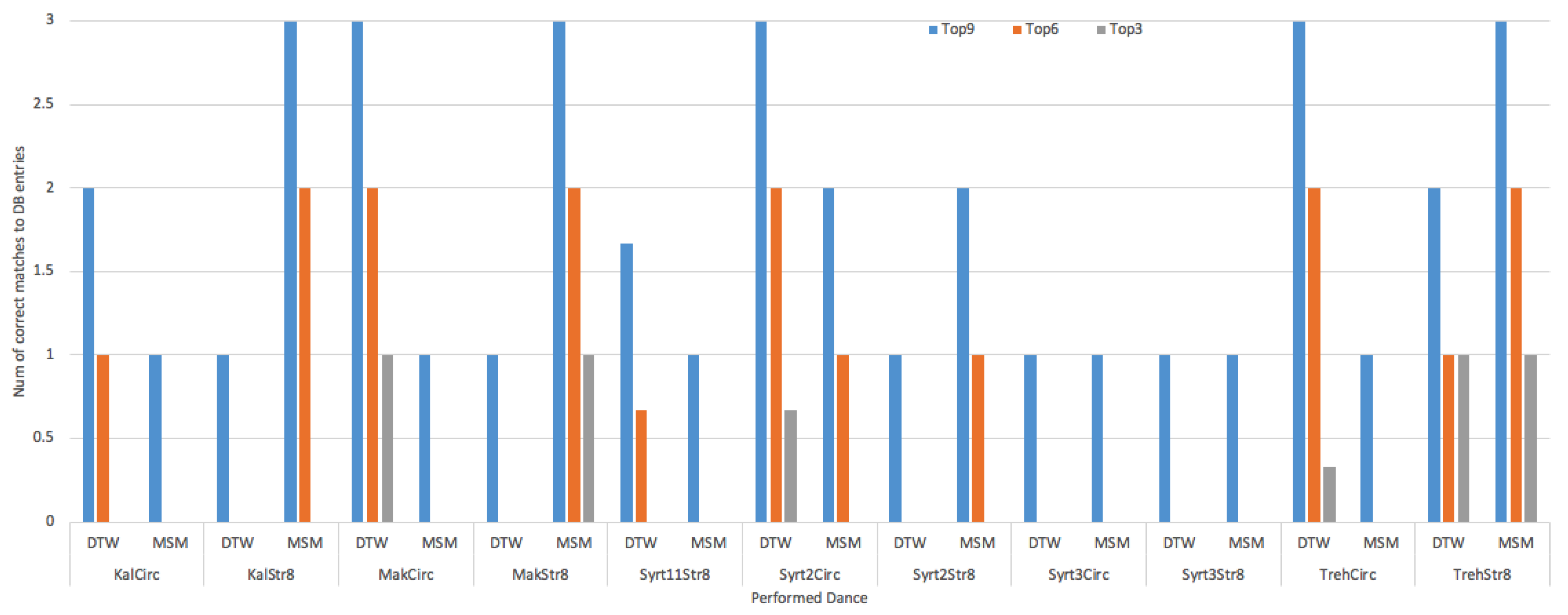
4.2. Similarity Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ICH | Intangible Cultural Heritage |
| DTW | Dynamic Time Warping |
| ITGD | i-Treasures Game Design module |
| MSM | Move-Split-Merge |
References
- Dimitropoulos, K.; Manitsaris, S.; Tsalakanidou, F.; Nikolopoulos, S.; Denby, B.; Kork, S.; Crevier-Buchman, L.; Pillot-Loiseau, C.; Adda-Decker, M.; Dupont, S.; et al. Capturing the intangible: An introduction to the i-treasures project. In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP), Lisbon, Portugal, 5–8 January 2014; pp. 773–781. [Google Scholar]
- Shay, A.; Sellers-Young, B. Dance and Ethnicity. In The Oxford Handbook of Dance and Ethnicity; Oxford University Press: Oxford, UK, 2016. [Google Scholar]
- Ioannides, M.; Hadjiprocopi, A.; Doulamis, N.; Doulamis, A.; Protopapadakis, E.; Makantasis, K.; Santos, P.; Fellner, D.; Stork, A.; Balet, O.; et al. Online 4D reconstruction using multi-images available under Open Access. ISPRS Ann. Photogr. Remote Sens. Sapt. Inf. Sci. 2013, 2, 169–174. [Google Scholar] [CrossRef]
- Kyriakaki, G.; Doulamis, A.; Doulamis, N.; Ioannides, M.; Makantasis, K.; Protopapadakis, E.; Hadjiprocopis, A.; Wenzel, K.; Fritsch, D.; Klein, M.; et al. 4D reconstruction of tangible cultural heritage objects from web-retrieved images. Int. J. Heri. Digit. Era 2014, 3, 431–451. [Google Scholar] [CrossRef]
- Doulamis, A.D.; Doulamis, N.D.; Makantasis, K.; Klein, M. A 4D Virtual/Augmented Reality Viewer Exploiting Unstructured Web-based Image Data. In Proceedings of the 10th International Conference on Computer Vision Theory and Applications, Berlin, Germeny, 11–14 March 2015; pp. 631–639. [Google Scholar]
- Voulodimos, A.; Doulamis, N.; Fritsch, D.; Makantasis, K.; Doulamis, A.; Klein, M. Four-dimensional reconstruction of cultural heritage sites based on photogrammetry and clustering. J. Electron. Imaging 2016, 26, 011013. [Google Scholar] [CrossRef]
- Zhang, Z. Microsoft kinect sensor and its effect. IEEE Multimed. 2012, 19, 4–10. [Google Scholar] [CrossRef]
- Keselman, L.; Woodfill, J.I.; Grunnet-Jepsen, A.; Bhowmik, A. Intel realsense stereoscopic depth cameras. arXiv 2017, arXiv:1705.05548. [Google Scholar]
- Voulodimos, A.; Rallis, I.; Doulamis, N. Physics-based keyframe selection for human motion summarization. Multimed. Tools Appl. 2018, 1–17. [Google Scholar] [CrossRef]
- Doulamis, N.; Doulamis, A.; Ioannidis, C.; Klein, M.; Ioannides, M. Modelling of static and moving objects: Digitizing tangible and intangible cultural heritage. In Mixed Reality and Gamification for Cultural Heritage; Loannides, M., Magnenat-Thalmann, N., Papagiannakis, G., Eds.; Springer: Cham, Switzerland, 2017; pp. 567–589. [Google Scholar]
- Kitsikidis, A.; Dimitropoulos, K.; Yilmaz, E.; Douka, S.; Grammalidis, N. Multi-sensor technology and fuzzy logic for dancer’s motion analysis and performance evaluation within a 3D virtual environment. In Proceedings of the International Conference on Universal Access in Human-Computer Interaction, Heraklion, Greece, 22–27 June 2014; pp. 379–390. [Google Scholar]
- Laggis, A.; Doulamis, N.; Protopapadakis, E.; Georgopoulos, A. A low-cost markerless tracking system for trajectory interpretation. In Proceedings of the ISPRS International Workshop of 3D Virtual Reconstruction and Visualization of Complex Arhitectures, Nafplio, Greece, 1–3 March 2017; pp. 413–418. [Google Scholar]
- Kitsikidis, A.; Dimitropoulos, K.; Douka, S.; Grammalidis, N. Dance analysis using multiple kinect sensors. In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP), Lisbon, Portugal, 5–8 January 2014; pp. 789–795. [Google Scholar]
- Voulodimos, A.; Doulamis, N.; Doulamis, A.; Rallis, I. Kinematics-based Extraction of Salient 3D Human Motion Data for Summarization of Choreographic Sequences. In Proceedings of the 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 3013–3018. [Google Scholar]
- Rallis, I.; Langis, A.; Georgoulas, I.; Voulodimos, A.; Doulamis, N.; Doulamis, A. An Embodied Learning Game Using Kinect and Labanotation for Analysis and Visualization of Dance Kinesiology. In Proceedings of the 10th International Conference on Virtual Worlds and Games for Serious Applications (VS-Games), Wurzburg, Germany, 5–7 September 2018; pp. 1–8. [Google Scholar]
- Voulodimos, A.; Kosmopoulos, D.; Veres, G.; Grabner, H.; Gool, L.V.; Varvarigou, T. Online classification of visual tasks for industrial workflow monitoring. Neural Netw. 2011, 24, 852–860. [Google Scholar] [CrossRef] [PubMed]
- Kosmopoulos, D.I.; Voulodimos, A.S.; Varvarigou, T.A. Robust Human Behavior Modeling from Multiple Cameras. In Proceedings of the 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 3575–3578. [Google Scholar]
- Doulamis, N.; Voulodimos, A. FAST-MDL: Fast Adaptive Supervised Training of multi-layered deep learning models for consistent object tracking and classification. In Proceedings of the 2016 IEEE International Conference on Imaging Systems and Techniques (IST), Chania, Greece, 4–6 October 2016; pp. 318–323. [Google Scholar] [CrossRef]
- Doulamis, N.D.; Voulodimos, A.S.; Kosmopoulos, D.I.; Varvarigou, T.A. Enhanced Human Behavior Recognition Using HMM and Evaluative Rectification. In Proceedings of the First ACM International Workshop on Analysis and Retrieval of Tracked Events and Motion in Imagery Streams, New York, NY, USA, 29 October 2010; pp. 39–44. [Google Scholar] [CrossRef]
- Voulodimos, A.; Doulamis, N.; Doulamis, A.; Protopapadakis, E. Deep learning for computer vision: A brief review. Comput. Intell. Neurosci. 2018, 2018, 13. [Google Scholar] [CrossRef] [PubMed]
- Rallis, I.; Georgoulas, I.; Doulamis, N.; Voulodimos, A.; Terzopoulos, P. Extraction of key postures from 3D human motion data for choreography summarization. In Proceedings of the 9th International Conference on Virtual Worlds and Games for Serious Applications (VS-Games), Athens, Greece, 6–8 September 2017; pp. 94–101. [Google Scholar]
- Protopapadakis, E.; Grammatikopoulou, A.; Doulamis, A.; Grammalidis, N. Folk Dance Pattern Recognition Over Depth Images Acquired via Kinect Sensor. In Proceedings of the 3D ARCH-3D Virtual Reconstruction and Visualization of Complex Architectures, Nafplio, Greece, 1–3 March 2017; pp. 587–593. [Google Scholar]
- Rallis, I.; Doulamis, N.; Doulamis, A.; Voulodimos, A.; Vescoukis, V. Spatio-temporal summarization of dance choreographies. Comput. Graph. 2018, 73, 88–101. [Google Scholar] [CrossRef]
- Rallis, I.; Doulamis, N.; Voulodimos, A.; Doulamis, A. Hierarchical Sparse Modeling for Representative Selection in Choreographic Time Series. In Proceedings of the 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 1023–1027. [Google Scholar]
- Pfister, A.; West, A.M.; Bronner, S.; Noah, J.A. Comparative abilities of Microsoft Kinect and Vicon 3D motion capture for gait analysis. J. Med. Eng. Technol. 2014, 38, 274–280. [Google Scholar] [CrossRef] [PubMed]
- Fern’ndez-Baena, A.; Susín, A.; Lligadas, X. Biomechanical validation of upper-body and lower-body joint movements of kinect motion capture data for rehabilitation treatments. In Proceedings of the 4th International Conference on Intelligent Networking and Collaborative Systems, Bucharest, Romania, 19–21 September 2012; pp. 656–661. [Google Scholar]
- Galna, B.; Barry, G.; Jackson, D.; Mhiripiri, D.; Olivier, P.; Rochester, L. Accuracy of the Microsoft Kinect sensor for measuring movement in people with Parkinson’s disease. Gait Post. 2014, 39, 1062–1068. [Google Scholar] [CrossRef] [PubMed]
- Adistambha, K.; Ritz, C.H.; Burnett, I.S. Motion classification using Dynamic Time Warping. In Proceedings of the 2008 IEEE 10th Workshop on Multimedia Signal Processing, Cairns, Qld, Australia, 8–10 October 2008; pp. 622–627. [Google Scholar] [CrossRef]
- Choi, H.R.; Kim, T. Combined dynamic time warping with multiple sensors for 3D gesture recognition. Sensors 2017, 17, 1893. [Google Scholar] [CrossRef] [PubMed]
- Ikizler, N.; Duygulu, P. Human action recognition using distribution of oriented rectangular patches. In Human Motion—Understanding, Modeling, Capture and Animation; Elgammal, A., Rosenhahn, B., Klette, R., Eds.; Springer: Berlin, Germany, 2007; pp. 271–284. [Google Scholar]
- Blackburn, J.; Ribeiro, E. Human motion recognition using isomap and dynamic time warping. In Human Motion—Understanding, Modeling, Capture and Animation; Elgammal, A., Rosenhahn, B., Klette, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 285–298. [Google Scholar]
- Doulamis, A.; Doulamis, N.; Ioannidis, C.; Chrysouli, C.; Grammalidis, N.; Dimitropoulos, K.; Potsiou, C.; Stathopoulou, E.K.; Ioannides, M. 5D modelling: An efficient approach for creating spationtemporal predictive 3D maps of large-scale cultural resources. In Proceedings of the ISPRS Annals of Photogrammetry, Remote Sensing & Spatial Information Sciences, Taipei, Taiwan, 31 August–4 September 2015; pp. 61–68. [Google Scholar]
- Lalos, C.; Voulodimos, A.; Doulamis, A.; Varvarigou, T. Efficient tracking using a robust motion estimation technique. Multimed. Tools Appl. 2014, 69, 277–292. [Google Scholar] [CrossRef]
- Doulamis, A.; Soile, S.; Doulamis, N.; Chrisouli, C.; Grammalidis, N.; Dimitropoulos, K.; Manesis, C.; Potsiou, C.; Ioannidis, C. Selective 4D modelling framework for spatial-temporal land information management system. In Proceedings of the Third International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2015), Paphos, Cyprus, 16–19 March 2015; Volume 9535, p. 953506. [Google Scholar]
- Berndt, D.J.; Clifford, J. Using dynamic time warping to find patterns in time series. In Proceedings of the 12th International Conference on Artificial Intelligence, Seattle, WA, USA, 31 July–4 August 1994; Volume 10, pp. 359–370. [Google Scholar]
- Stefan, A.; Athitsos, V.; Das, G. The Move-Split-Merge Metric for Time Series. IEEE Trans. Knowl. Data Eng. 2013, 25, 1425–1438. [Google Scholar] [CrossRef]
- Protopapadakis, E.; Voulodimos, A.; Doulamis, N. Multidimensional trajectory similarity estimation via spatial-temporal keyframe selection and signal correlation analysis. In Proceedings of the 11th PErvasive Technologies Related to Assistive Environments Conference, Corfu, Greece, 25–29 June 2018; pp. 91–97. [Google Scholar]
- Fortuna, L.; Frasca, M.; Camerano, C. Strange attractors, kinematic trajectories and synchronization. Int. J. Bifurcat. Chaos 2008, 18, 3703–3718. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Folklore Dance | Dance Description | Main Choreographic Steps |
|---|---|---|
| Enteka (11) | A popular dance in Western Macedonia (Kozani, Kastoria, Greven, Florina, etc.). It is performed freely as a street carnival dance, but also around the carnival fires. The dancers’ hands are free to move or can be placed at the waist. | (1) Initial Posture (IP); (2) Right Leg Up (RLU); (3) Dancer’s Right Turn (DRT); (4) Initial Posture (IP) (5) Dancer’s Left Turn (DLT). |
| Kalamatianos | A very popular Greek traditional dance, also known at an international level. It is a circle dance, which is performed by dancers holding hands and moving in a counterclockwise circular manner. | (1) Initial Posture (IP); (2) Cross Legs (CL); (3) Cross Legs (CL); (4) Cross Legs (CL); (5) Cross Legs (CL); (6) Initial Posture (IP); (7) Cross Legs Backwards (CLB). |
| Makedonikos | A circle dance (known mainly in Western and Central Macedonia) which follows a 7/8 musical beat. It is similar to Kalamatianos, since it also includes 12 distinct steps, but it is performed in a more joyful fashion. | (1) Initial Posture (IP); (2) Left Leg Back (LLB); (3) Cross Legs (CL); (4) Cross Legs (CL); (5) Cross Legs (CL); (6) Initial Posture (IP); (7) Right Leg Back (RLB) |
| Syrtos (2 beats) | The Syrtos (2 beats) dance is structured in a quick 2-beat rhythm. It is mainly popular in Epirus and it is danced in a circular setting, both by men and women. | (1) Initial Posture (IP); (2) Cross Legs Backwards (CLB); (3) Initial Posture (IP); (4) Left Leg Front (LLF); (5) Initial Posture (IP); (6) Left Leg Front (LLF) |
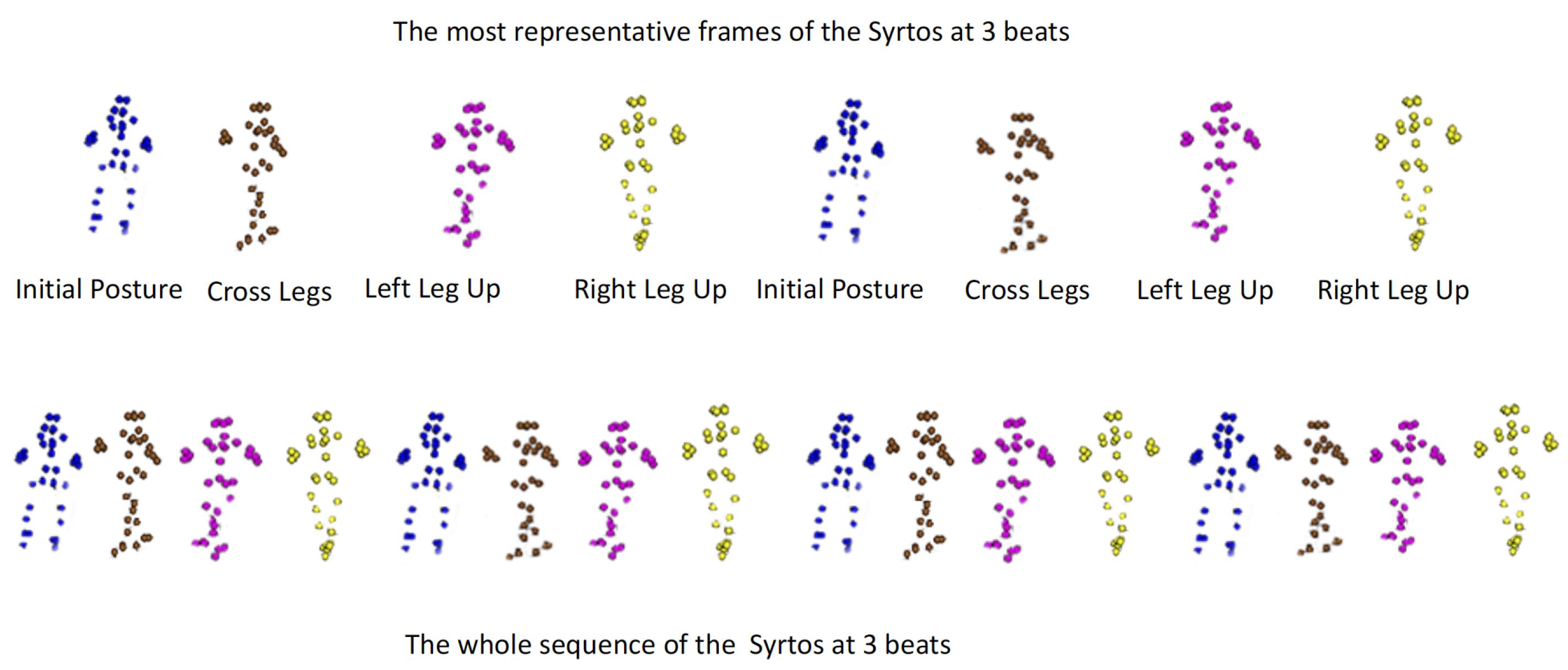
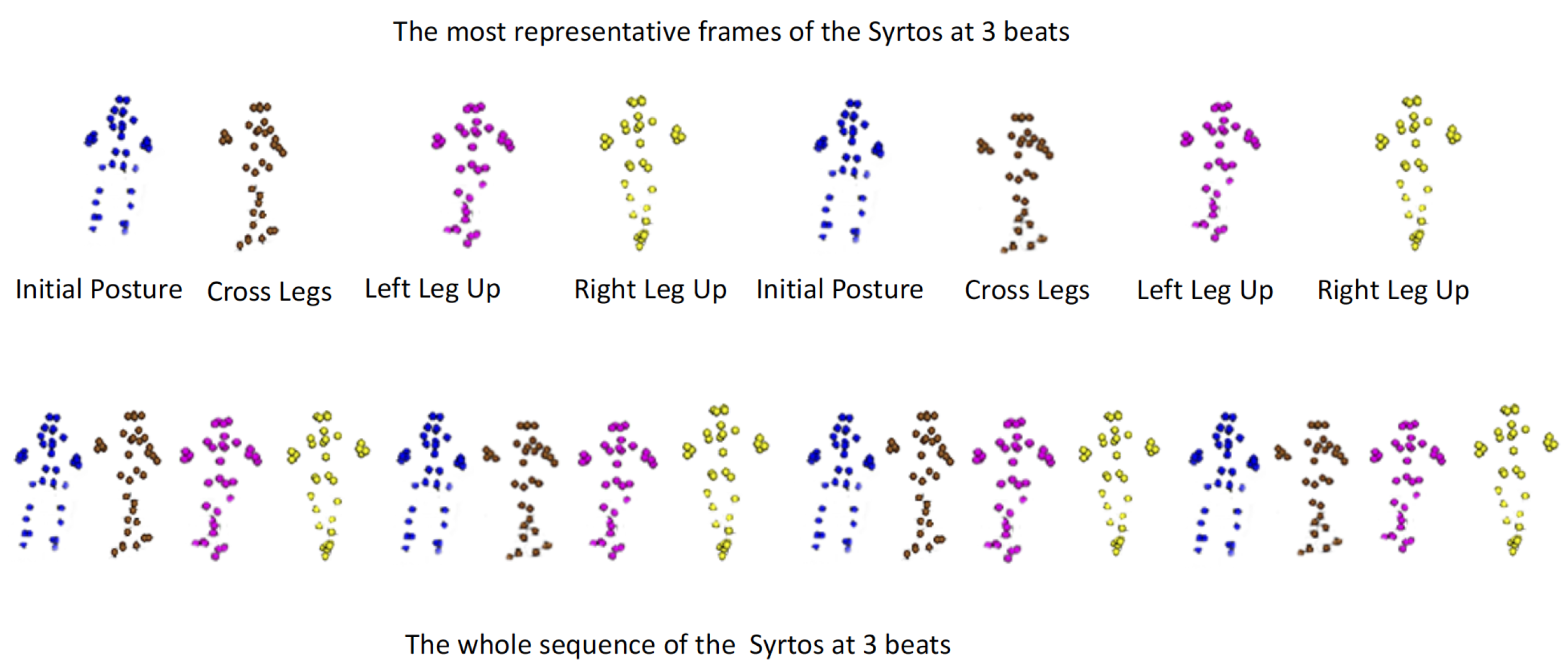
| Syrtos (3 beats) | Syrtos is structured in a slower 3-beat rhythm. It can be danced both at a line and at a circular setting, both by men and women, holding hands and facing right. It is very popular throughout Greece and Cyprus. | (1) Initial Posture (IP); (2) Cross Leg (CL); (3) Initial Posture (IP); (4) Left Leg Up (LLU); (5) Initial Posture (IP); (6) Right Leg Up (RLU) |
| Trehatos (Running) | Trehatos is a dance stemming from the village Neochorouda in Thessaloniki. Its kinetic theme includes three different patterns: one resembles the Syrtos (3 beats) pattern, the second is characterized by intense motor activity and the other one connects the aforementioned two. It is danced in a circular setting. | (1) Initial Posture (IP); (2) Cross Legs (CL); (3) Cross Legs (CL); (4) Cross Legs (CL); (5) Initial Posture (IP); (6) Left Leg Up (LLU); (7) Right Leg Up (RLU); (8) Left Leg Up (LLU); (9) Cross Legs Backwards (CLB) |
| Motion Capture System | Cost | Accuracy | Calibration | Camera Resolution |
|---|---|---|---|---|
| Kinect | Low | Low | Simple | Low |
| VICON | High | High | Difficult | High |
| Dance | Variation | Short Name | Duration (Frames) | ||
|---|---|---|---|---|---|
| Dancer 1 | Dancer 2 | Dancer 3 | |||
| Enteka | Straight | Syrt11Str8 | 749 | 807 | 858 |
| Kalamatianos | Circle | KalCirc | 655 | 593 | 561 |
| Straight | KalStr8 | 304 | 378 | 455 | |
| Makedonikos | Circle | MakCirc | 424 | 582 | 409 |
| Straight | MakStr8 | 283 | 367 | 418 | |
| Syrtos 2 | Circle | Syrt2Circ | 608 | 543 | 352 |
| Straight | Syrt2Str8 | 623 | 639 | 334 | |
| Syrtos 3 | Circle | Syrt3Circ | 608 | 964 | 947 |
| Straight | Syrt3Str8 | 1366 | 678 | 511 | |
| Trehatos | Circle | TrehCirc | 991 | 723 | 443 |
| Straight | TrehStr8 | 315 | 295 | 355 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rallis, I.; Protopapadakis, E.; Voulodimos, A.; Doulamis, N.; Doulamis, A.; Bardis, G. Choreographic Pattern Analysis from Heterogeneous Motion Capture Systems Using Dynamic Time Warping. Technologies 2019, 7, 56. https://doi.org/10.3390/technologies7030056
Rallis I, Protopapadakis E, Voulodimos A, Doulamis N, Doulamis A, Bardis G. Choreographic Pattern Analysis from Heterogeneous Motion Capture Systems Using Dynamic Time Warping. Technologies. 2019; 7(3):56. https://doi.org/10.3390/technologies7030056
Chicago/Turabian StyleRallis, Ioannis, Eftychios Protopapadakis, Athanasios Voulodimos, Nikolaos Doulamis, Anastasios Doulamis, and Georgios Bardis. 2019. "Choreographic Pattern Analysis from Heterogeneous Motion Capture Systems Using Dynamic Time Warping" Technologies 7, no. 3: 56. https://doi.org/10.3390/technologies7030056
APA StyleRallis, I., Protopapadakis, E., Voulodimos, A., Doulamis, N., Doulamis, A., & Bardis, G. (2019). Choreographic Pattern Analysis from Heterogeneous Motion Capture Systems Using Dynamic Time Warping. Technologies, 7(3), 56. https://doi.org/10.3390/technologies7030056