1. Introduction
The need for disaster monitoring and recovery mechanisms has arisen as long as natural disasters and their adverse effects have been known to humankind. The long list of natural and man-made disasters include: floods; heavy snowfalls; wild/bush fires; storms/hurricanes; tsunamis; earthquakes; pandemics, and; nuclear disasters [
1,
2]. Despite there being a strong need to implement communications between a disaster-stricken area and the disaster managing offices in local or global agencies such as the United Nations and the European Commission, the goal is to secure the necessary communications to support first responder activities with a strategy to restore network services in the initial aftermath [
3]. As the internet is emerging with prevalent technologies such as big data, cloud computing, the Internet of Things (IoT), and 5G cellular networks, it is now feasible to provide low-cost networks that cover a wide area such as long-range (LoRa) networks as a type of low-power wide-area network (LPWAN) [
4,
5]. These technologies allow sensors to be deployed and managed with a low-power (e.g., 25 mW), wide-area client and up to a 25-km test link for the operating areas for sensor networks [
6]. When IoT networks, estimated by Cisco to have 50 billion connected devices by 2020 [
7], are deployed and converged with these sensor networks, it may be possible to monitor virtually all habitable areas without requiring additional managing systems. That is, through self-communications amongst devices such as machine-to-machine (M2M) interfaces and device-to-device (D2D) communication technologies [
8]. For example, a mobile device communicates with a peer-to-peer wireless communications network via D2D communication when the device is out of range of the cellular network. In an emergency situation, it sends a message from the device to a network element if a network connection between the mobile device and network element exists. If this connection does not exist, the device sends the message to a second mobile device, which will connect to the third mobile device via D2D communication [
8]. M2M communication technology is used in IoT for various applications, such as an alarm notification to mobile tower monitoring systems [
9] and in mobile health (mHealth) alarming applications via the analysis of personal sensor device-sensed health data, as well as utilising intelligent functions such as inference system in body sensor devices [
10,
11,
12,
13]. As LPWAN transmits small volumes of data to save battery power, an inference system can also be used to reduce the data size and the frequency of transmission [
14]. In disaster monitoring, it is crucial to identify the affected areas and their progression into other areas in order to predict the potential impact and damage. For this, it is required to know the geographical location information of individual sensor nodes, which may relay the information (sensor measurements and location identification; LID) through the network until it has been received by the LPWAN gateway, which will eventually be reached by the disaster relief agency (DRA) through the public network using IP Multimedia System (IMS)- or Voice over IP (VoIP)-based networks, depending on the country or regions. This may present a challenge of carrying data (LID and sensor measurements) to the final destination, as it may cross various networks that support different technologies and have different signalling formats. To solve this problem, we propose to use the calling party address (a number in a setup message to contain LID), which is used by all network technologies, along with the called party address (B number) by replacing the A number field (real calling party address) by a Pseudo A Number (PAN), including LID.
There have been tools and risk assessment system recognised by Council of Australian Government (COAG), such as the Bushfire Risk Management Model developed by the Bushfire cooperative research centre. This model directly relates the impact of various management strategies to changes in fire characteristics across the landscape [
15], and we added a variant of wind to demonstrate the solution using PAN to be used by fire agencies, town planners and policymakers.
The benefit of this proposal is that it does not require a significant modification or addition of a field to carry the LID within an existing signalling system. However, it may require minimal changes of the A number handling by a carrier network, whilst the actual A number is not required for accounting during the call setup, as it will be regarded as an emergency call. If it is normal to be charged, charging arrangements by the carrier may also be required when provisioning the service. To deliver the PAN, the existing calling line identification presentation (CLIP) feature can be used for data management by the DRA. For implementation of the calling party numbers in multiple networks, it will require collective co-operation among the network operators and service providers in a region or country. Currently, there is no known activity of standardising emergency call handling among countries, whilst there are rules on how to handle emergency numbers such as 000 and 911 in Australia, for instance. For developing countries, this proposal may be useful to monitor disaster status with minimal modifications in their carrier networks.
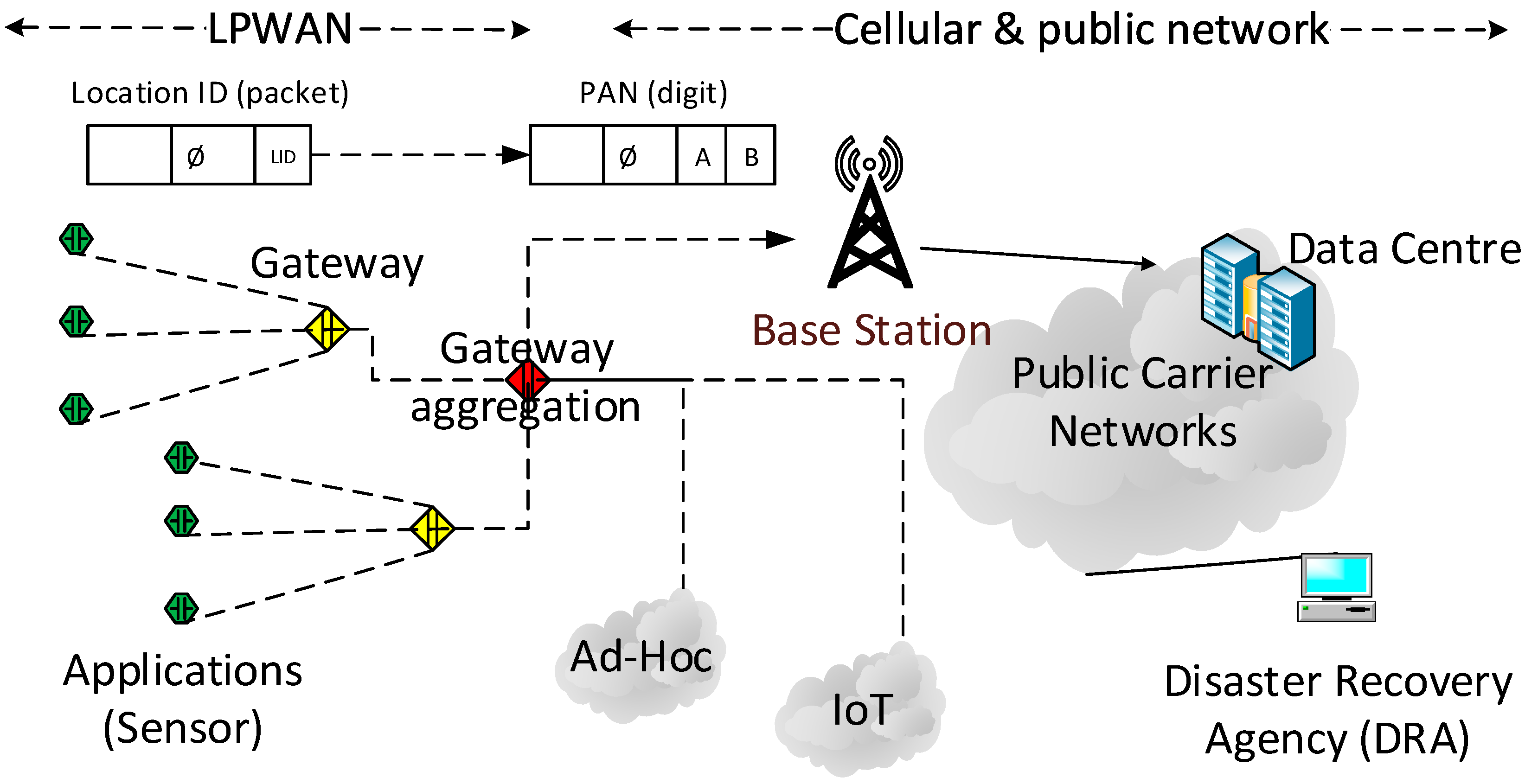
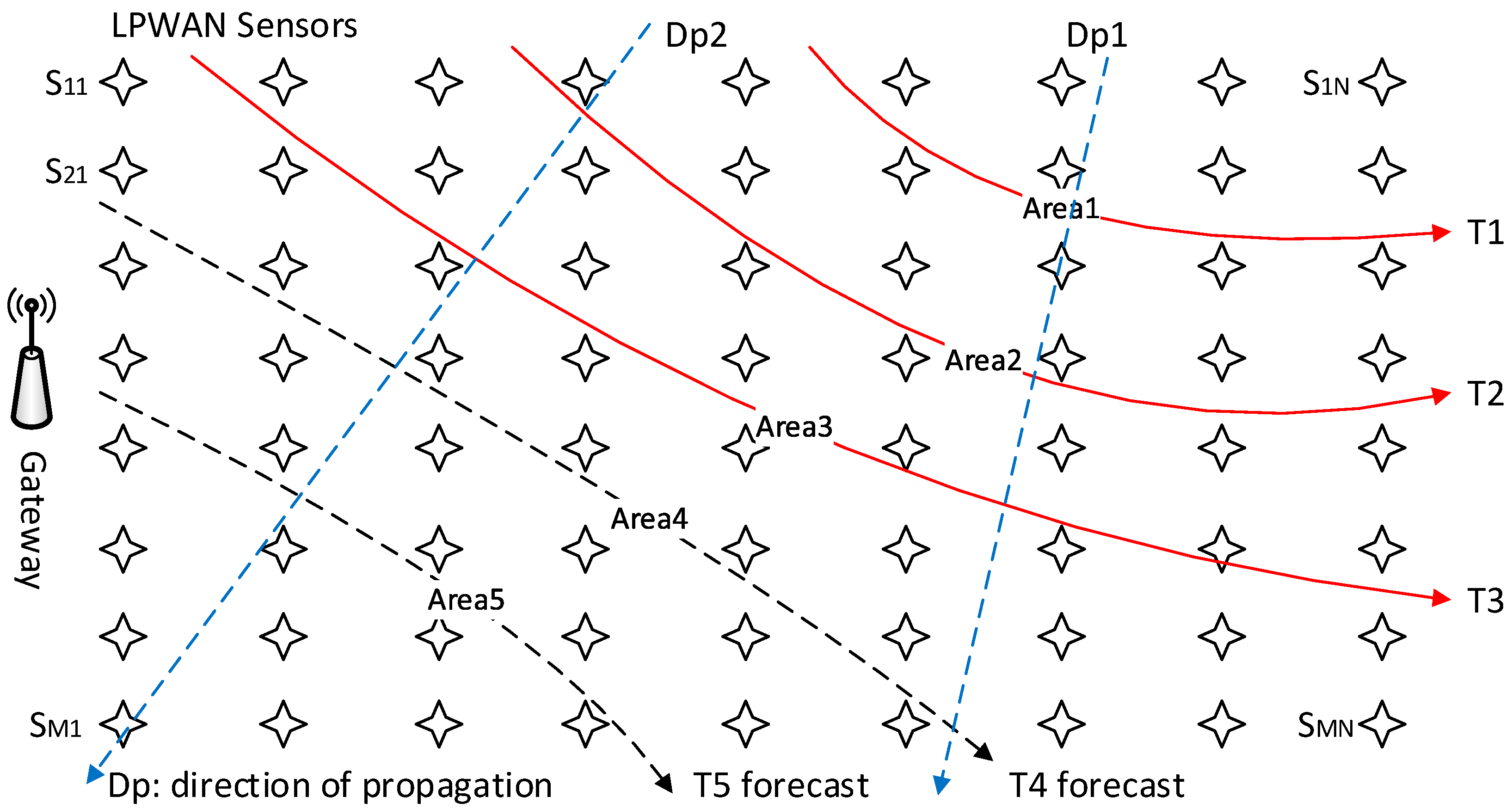
Figure 1 shows the network topology of LPWAN and carrier networks.
3. Design and Implementation
This section describes methodologies and implementation for the generation and forwarding of LID utilising PAN within LPWANs and transferring towards DRA. Types of calls and networks as well as call setups are also described to show how the actual information flows from the origination to the destination in case of an emergency.
3.1. Data Collection and Transmission in LPWANs
Deployed sensors capture data such as temperature, humidity, air condition, and so forth, and transmit them to neighbouring devices which forward/relay them towards the gateway, which is meant to collect data in its own network. There can be multiple gateways, which are aggregated by a customer edge (CE) to communicate with a base station (BS). Whilst the internal communications can be done by LPWAN protocols, the interface from the CE to BS is done by the public network such as 3G or 4G LTE.
3.2. Location ID
There are various formats for location such as GPS coordinates which can be used as an LID, such as in the example below:
degrees minutes seconds: 40°26′46″ N 79°58′56″ W.
degrees decimal minutes: 40°26.767′ N 79°58.933′ W.
decimal degrees: 40.446° N 79.982° W.
There are benefits of using real-time GPS information in PAN, such as obtaining accurate LIDs in the lack of cell/Wi-Fi signalling areas, however, there are associated disadvantages such as an increased battery power consumption as well as security issues to consider. As deployed sensors will not change their location in most cases, it is not required to contact satellites to constantly update the LID in situations where the sensors’ computational capacity is limited. If the capacity allows, the sensor can communicate with satellites to maintain an accurate location information on a regular basis, e.g., monthly or annually, and the connection to GPS may otherwise be limited to conserve battery power. Otherwise, the LID can be pre-programmed when deployed. In the example above, when the GPS coordinate is used for the LID (but not necessarily to connect to satellites), the format should be defined on how to conform the content to the carrier network. For example, when International Telecommunication Union Telecommunication Standardization Sector (ITU-T) E.164 is used, the format can be as shown in
Table 2 to accommodate the LID, for example, XY4044679982 (12 digits), where XY can be an identification of the network, whilst each country has its own national numbering plan, and therefore the XY format should follow the scheme. The number structure for global service by the E.164 also suggests three digits for the country code and 12 digits for the global subscriber number [
29]. Alternatively, the LID can also be a proprietary format as long as it can traverse the networks without being rejected. In this way, the number of 12 digits can be further granulised as it does not have to include the degree portion of the GPS coordinate, which saves four digits for other information, for example, sensor measurements.
3.3. Gateways
Whilst sensors transmit data to gateways, the collected data is converted into a proper format at the gateway (or aggregation gateway as a customer edge). There are two key data which are processed at the gateway: (1) LID: location information such as the GPS coordinate or proprietary location data format being used by the DRA is converted into the A party address format in the signalling field consisting of XY (network ID) and 10 digits of numeric data for the location, as shown in
Table 3, for instance; (2) sensor measurements are included in the data (payload) field, which is kept short to conserve battery power. The gateway plays a key role in performing data collection from the sensors, instructing the network to change the status to an emergency mode when triggered, forming the PAN field from data received from the sensors, and connecting to carrier or peer-to-peer networks. It also interacts with other gateways in the LPWAN for routing if required.
3.4. Call Setup in Mobile Station
There are normal setup and emergency setup procedures described by 3GPP 24.008. Depending on the subsequent network interconnecting from the cellular network, a proper setup process can be used. In any case, every call should have the calling party address in a proper format. When a gateway connects to a cellular network, it should format the setup message to generate and include the PAN in the A number field, which will be used by the cellular network to forward to the destination. Between mobile and circuit switched network, proper procedures are described for the setup and for the emergency setup. For example, Table 9.54/3GPP TS 24.008 [
30] summarises the messages for circuit-switched call control.
3.5. PAN (Calling Party Numbers)
In many networks, the calling party numbers are controlled by the carrier and cannot be changed by the subscriber. Sometimes networks have screening/filtering configuration applied to the switch/base station so that their calling party numbers need to conform to certain number ranges or be positively vetted against a list of known numbers. For example, a carrier exchange system or switch may reject the incoming call based on a calling party number, which has been classified as invalid digits when analysing the calling party number by digit analysis. This needs to be worked out with carriers such that certain number ranges can be added to be in the digit analysis processes for those disaster related calls. To present a PAN to the carrier network, an example is shown in
Table 3 provided it still requires conforming of a carrier’s numbering scheme for calling party numbers.
3.6. Call Types
When a call has arrived at the carrier network for the first time from the LPWAN, it should be classified as an emergency call type, as it is an emergency in the case of a disaster situation. However, when it is not an emergency, the call may be treated as a normal call. To differentiate the calls, there are three types of calls from the LPWAN to the carrier network.
- (1)
Scheduled calls: LPWAN sensors transmit sensed data on a regular basis as pre-programmed, for example, every hour, for checking of the sensor status.
- (2)
Urgent calls: When a disaster situation occurs, LPWAN sensors will trigger the gateway with sensed data as compared to the predefined threshold values. The gateway in this case transmits the emergency data to the destination.
- (3)
Recovery calls: When sensors capture measurements that have become within the normal ranges against the threshold values, they transmit the data as recovered and the gateway transmits them to the disaster centre to be marked as normal.
The type of call can also be in the form of short message service (SMS), PSTN or Mobile termination, Answered or Not answered, emergency call (000), and so on.
3.7. Network Types for Origination and Termination
LPWAN gateways may transmit the calls to cellular or other networks as needed and as applicable. For example, some areas may not be covered by mobile networks but are covered by circuit switched networks. In the case of a disaster situation, some or all of the networks may not be available, and the LPWAN may connect to peer networks such as the IoT network. In any case, the destination network where the disaster centre is connected to is likely to be in a carrier network such as 3G mobile or PSTN numbers, depending on what number has been dialled by the gateway.
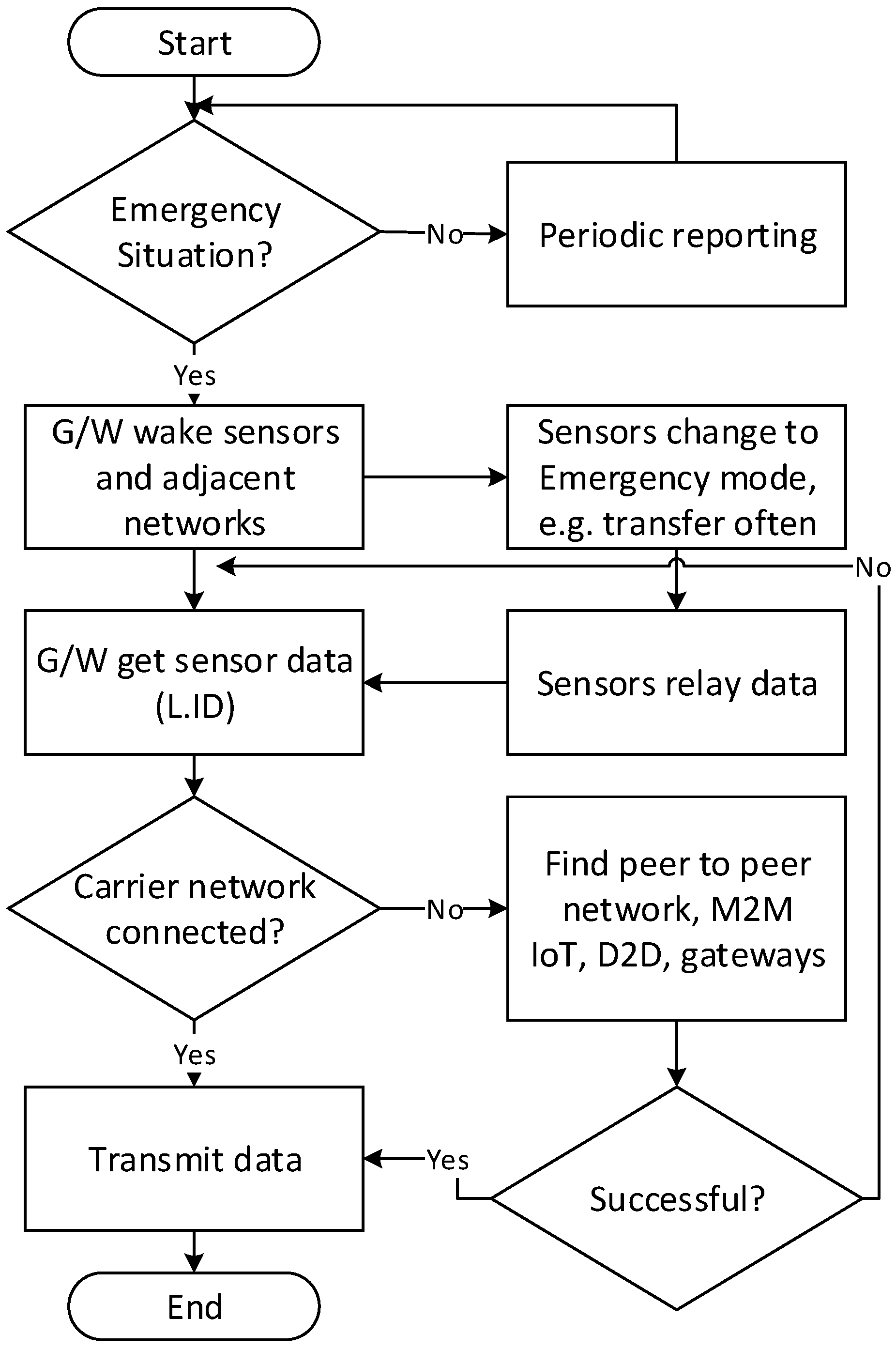
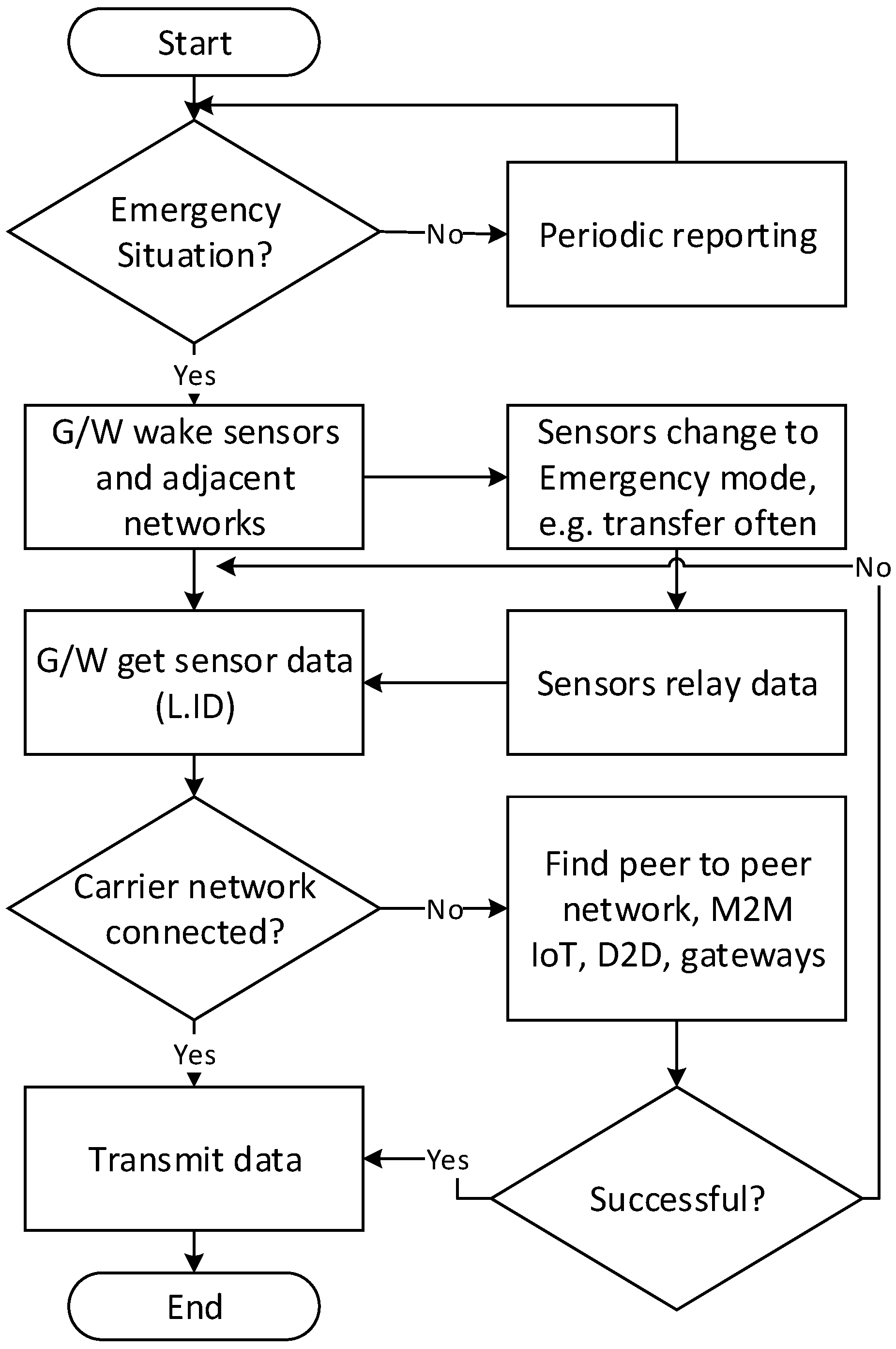
Figure 2 shows emergency procedures of a gateway and sensors in an LPWAN.
4. Application
A series of bushfires known as Black Saturday burned across the state of Victoria, Australia, on 7 February 2009 during extreme weather conditions. Around midday, wind speeds reached their peak and along with arid conditions, sparked a bushfire that became the deadliest and most intense firestorm ever experienced in Australia’s history. This disaster resulted in the deaths of 173 people, with 414 injured, 450,000 hectares of area burned and an economic loss of more than
$4 billion USD [
31,
32].
For the purposes of demonstration, a bushfire scenario is considered to simulate sensed data collection by gateways for transmission to the DRA, where the data can be analysed for predicting areas that may be further impacted. Sensed data within LPWANs may be aggregated at a gateway independently from public networks. The original sensor’s (triggered sensor) LID and timestamp is relayed to the next sensor until it reaches a gateway.
Figure 3 demonstrates that at a particular time
T1, Area1 is affected by the disaster, and by
T2, it has spread to Area2. Eventually at
T3 and its affected area, our aim is to forecast the Area4 at
T4 using the previous data, that is, Areas (location information), at times
T1,
T2 and
T3. The directions of propagation are constantly calculated and reflected in the forecast, which will be recalculated for each subsequent time period. In other words, the estimated area of Area4 and the area that is actually affected at
T4 are used to forecast Area5 at
T5.
Bushfire behaviour is rather complex. It varies widely depending on variables such as air temperature, humidity, wind speed and direction, terrain, fuel load in the form of dry vegetation, as well as many other factors. Theoretical models for fire prediction which take these into account have been designed and are being constantly improved. One of the most high-resolution methods of bushfire measurements for monitoring and theoretical model verification purposes rely on expensive surveys using on-board infrared equipment on aircraft flying over the fire, which are unable to provide continuous data for extended periods of time. It should be mentioned that the sensor network approach relies on actual measurements received from the sensors at regular intervals, which allows for timely correction of any differences between measured and predicted data.
LID and timestamp information, as well as signal status, are vital information in identifying areas affected by the disaster. For example, sensor S
1N as shown in
Figure 3 is considered to be affected when the gateway loses its signal in comparison to the previous time it was online [
T =
TN − (
TN−1)]. The prediction of areas of future impact can be calculated as follows. The parameters of interest from each sensor can be represented by a matrix that mirror sensor locations.
In bushfire monitoring for instance, the parameter of interest PMN is the air temperature at each sensor. When the number of sensors returning parameter values exceeding the threshold allowed is reached, the disaster response is triggered. The direction of propagation, its rate of change and its velocity can be calculated by knowing the geographical position (xy coordinates) of the triggered sensors (xMN, yMN), the time this occurred (T1), and then tracking the propagation of the increased parameter values to the surrounding sensors at T2.
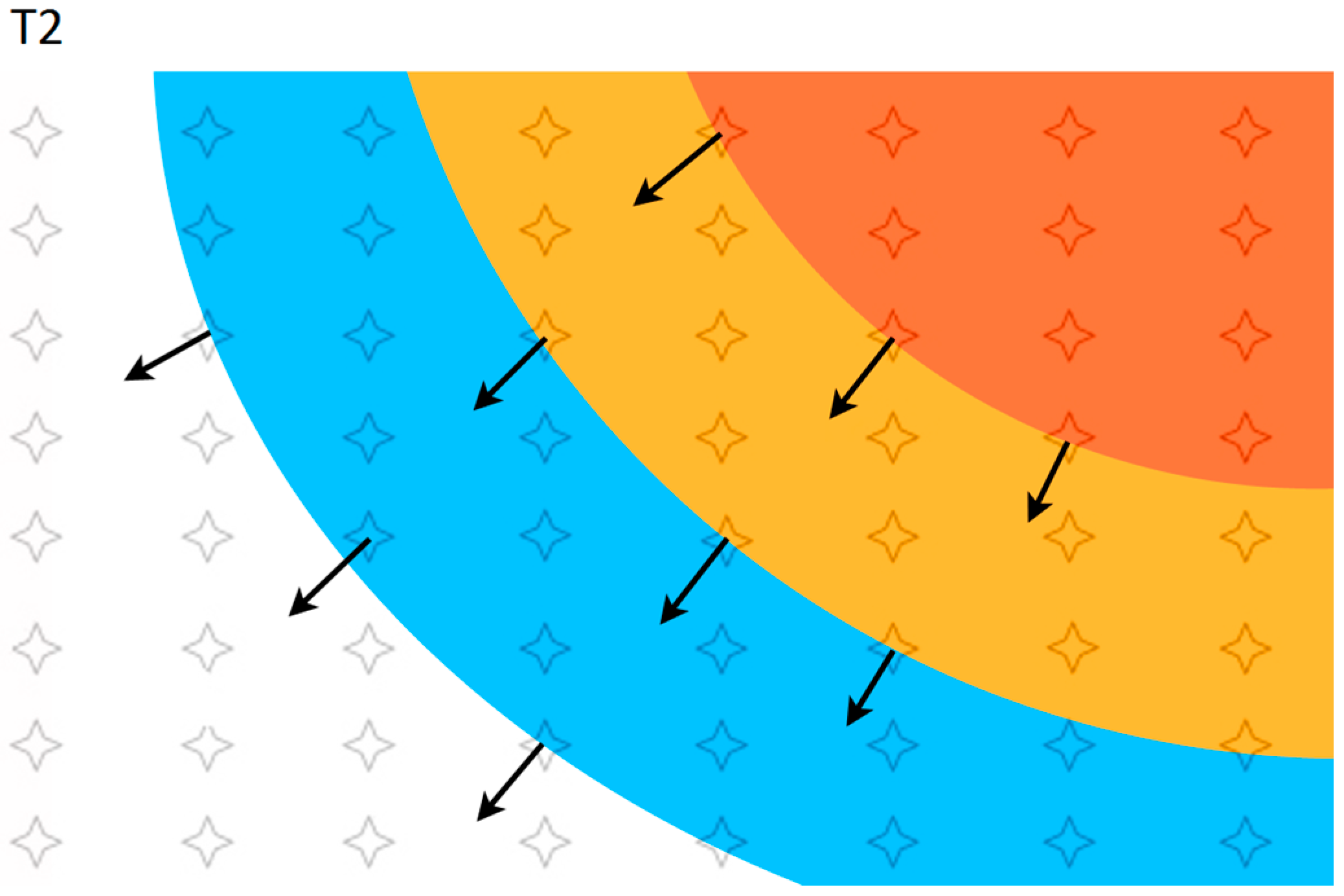
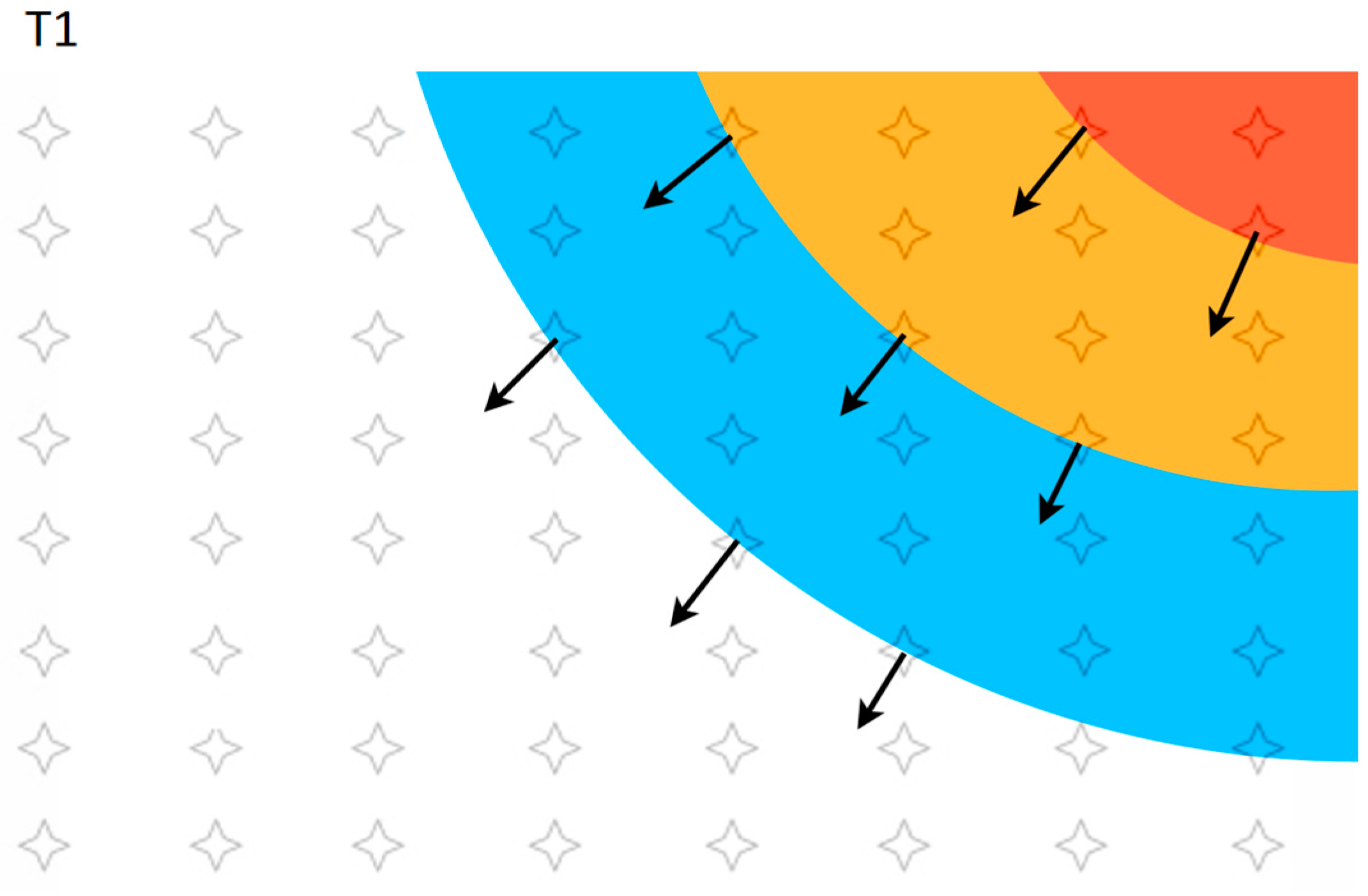
Considering an ambient temperature of 25 °C, a contour plot example of the temperature distribution that has been read from the sensor networks is shown in
Figure 4. The location of each sensor has been shown as an overlay. At
T1, a number of sensors that have exceeded the trigger temperature (
Ptr) are shown by the red zone. Zones that have medium and low impact respectively have been shown in yellow and blue. Zones that are still at ambient temperature and that have not been affected are shown in white. Isovalue contours (points with the same temperature) could be plotted from sensor data for the creation of a 2D map of parameter values, determination of the disaster propagation front, directions of disaster propagation and the calculation of affected areas. The direction of disaster propagation is perpendicular to the propagation front and is different at each location.
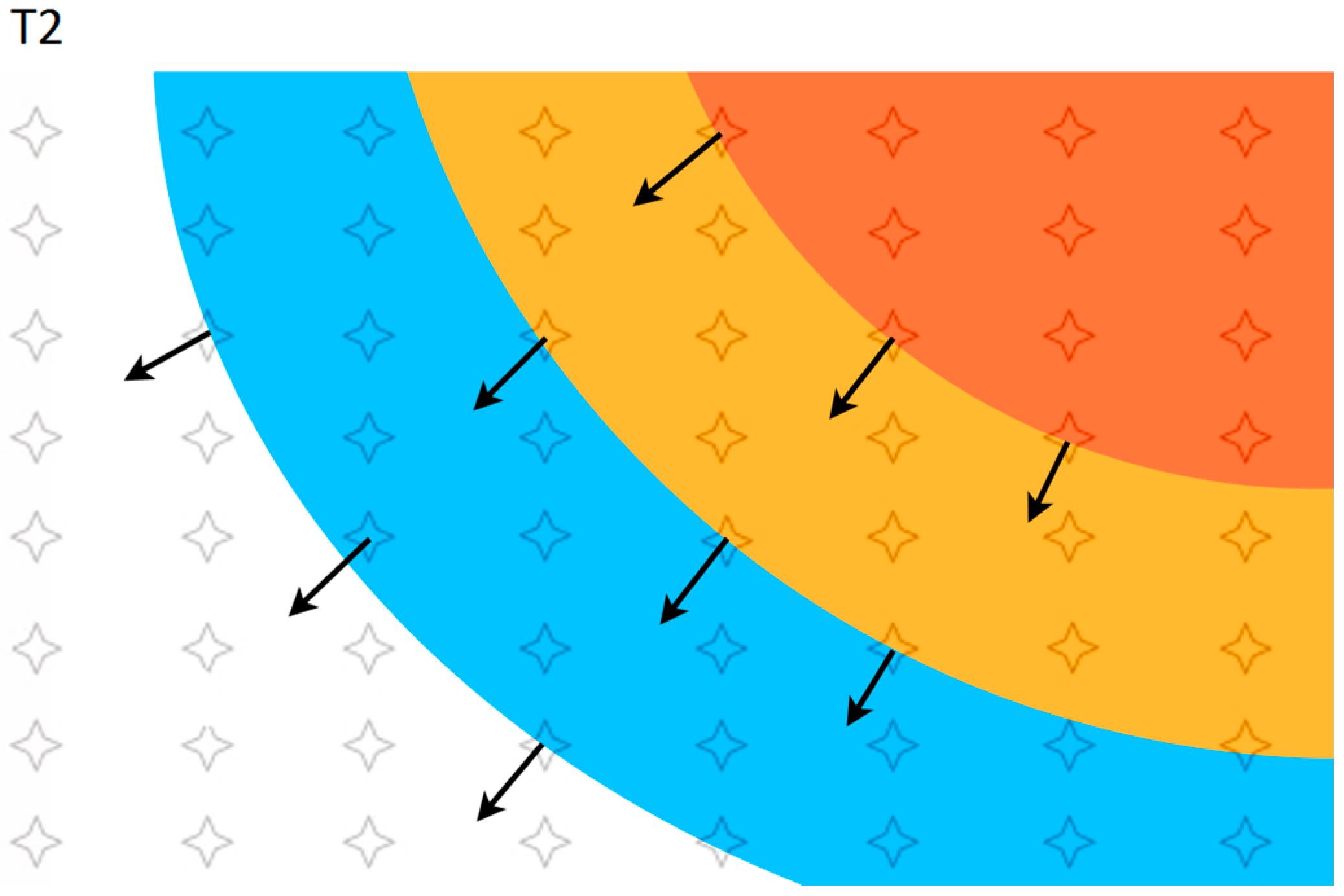
The subsequent changing of impact status at each location at
T2 is shown in
Figure 5. The rate of change of the parameter (temperature) at each sensor location can be shown as
where parameter measurements
P are obtained from a particular sensor at successive moments in time (in our example,
TN =
T2 and
TN−1 =
T1). The rate of parameter change,
R, can be represented in a matrix to reflect values at each sensor as
where
RMN are rate of change values for individual sensors. As an example, the following reflects the rate of parameter change at sensor S11.
Temperature rise at
T3 can be predicted at each sensor location. Sensors closer to the fire would be affected to a greater extent and experience a greater rate of temperature change until the maximum temperature is reached or the sensor goes offline [
33]. Parameter values at time
TN+1 at each sensor can be predicted as
The 2D impact map is then updated to reflect the new parameter values at each sensor and the new impact zones are reallocated accordingly. The predicted value can be compared with the actual value measured at time
TN+1, and the rate of change for the next prediction at
T4 can be corrected as
where
While this method can be used to predict temperature at a particular sensor, it cannot be applied to sensors that have not yet been affected without some degree of extrapolation. In estimating the future parameter values for these sensors, a 2D vector map of the disaster propagation velocities should be established. As a vector quantity, velocity is characterized by both magnitude as well as direction. For a rectangular array of sensors, the velocity of disaster propagation can be calculated along each of the horizontal (
x axis) and vertical (
y axis) directions as
where
dx and
dy are the distance between the sensors in
x and
y directions, and
t is the time taken for the second sensor to reach the same value as the first. To calculate the total velocity at a location, both the vector sum of horizontal and vertical components of velocity should be used
Distances
dx and
dy can be thought of as distances by which a selected isovalue contour has shifted along a horizontal or vertical direction per measured time interval. The total velocity direction should coincide with the direction of disaster propagation, which is perpendicular to the isovalue contour at each sensor location.
Figure 4 and
Figure 5 show the directions of disaster propagation for a few sensors. The spread of the disaster into a new location can be predicted by calculating the distance the fire will progress along each horizontal and vertical direction
where (
x0,
y0) are coordinates of the initial fire location and (
x,
y0) to (
x0,
y) are the fire spread locations. Factors such as wind speed and direction will influence the bush fire behaviour, and an example of the effect of wind on fire propagation has been shown in
Figure 6. A westerly wind direction (right to left) results in a faster velocity of propagation in the horizontal direction, as compared to
Figure 5, which shows fire propagation without the wind variable.
where
vyw is fire velocity with wind,
vy is the original fire velocity and
k is the coefficient of proportionality reflecting the contribution of wind velocity to the original velocity of fire propagation. The result is a change in both the magnitude and direction of the velocity, which is reflected by a distortion of the propagation front as compared to without the wind variable. Both the direction for cases with the wind and without have been shown in the figure to demonstrate the effect of rotation of all propagation fronts. However, there is no need to change the calculation approach. The same formulas can be used to calculate the fire propagation velocity. As the data are taken from real time sensor measurements, the effect of wind and other factors are already reflected in the parameter values
PN used for calculations.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}