
A Multi-Point Moment Matching Approach with Frequency-Aware ROM-Based Criteria for RLCk Model Order Reduction


Abstract

1. Introduction
- Two discrete convergence criteria, entirely based on the ROM’s transfer function, avoiding the calculation of the original model’s response [14]. The local convergence criterion allows the number of moments per expansion point to be chosen automatically, eliminating the need for fixed iteration counts [15], while the global convergence criterion provides a reliable assessment of the overall ROM accuracy.
- An adaptive expansion point selection strategy, where each subsequent expansion point is selected based on the current ROM error profile. This allows the algorithm to target the most critical frequency regions.
- Efficient implementation techniques, such as sparse/dense matrix handling and substitution of matrix inversions by linear solves, enabling fast and scalable reduction of large-scale RLCk models.
2. Related Work
3. MOR by MM
4. Proposed Methodology
| Algorithm 1 Proposed multi-point MM (MPMM) method |
Inputs: Outputs:
|
4.1. Orthogonalization Process
fordo fordo ; end for end for |
4.2. Convergence Criteria
- Global convergence evaluates the ROM transfer function over the entire candidate set of expansion points to ensure uniform accuracy across the desired frequency range.
- Local convergence focuses on the current expansion point () and its neighboring points () to ensure accurate local approximation around .
4.3. Expansion Point Selection
- Uniform distribution: Expansion points are evenly distributed within a user-defined frequency range.
- User-defined frequencies: Expansion points are specified directly by the user according to targeted frequency bands.
- The first point is chosen as the lowest frequency in (step 1).
- The second point is selected as the highest frequency.
- Subsequent points are chosen based on the maximum global approximation error among unused candidate expansion points.
- Real shifts offer broader convergence across the frequency spectrum, while imaginary shifts, despite their excellent local accuracy, may degrade performance away from the interpolation point [11].
4.4. Efficient Implementation Details
4.4.1. Matrix Inversions as Linear Solves
4.4.2. Handling of Sparse/Dense Sub-Matrices
5. Experimental Evaluation
5.1. Experimental Setup
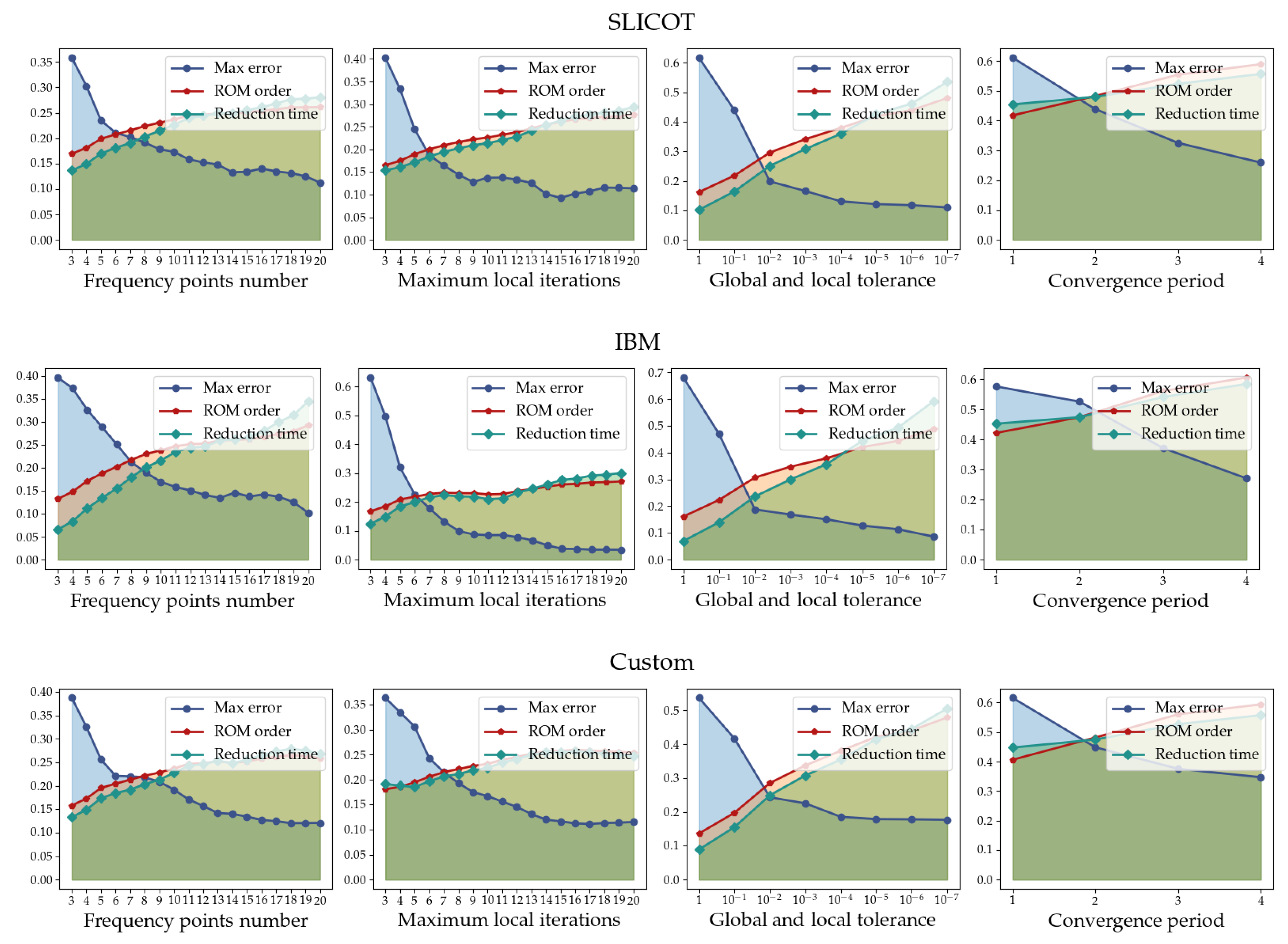
- Tolerance thresholds (, , ) set to ;
- Number of candidate frequency points and maximum local iterations (, ) set to 7;
- Convergence period () set to 2 iterations.
5.2. MPMM Parameter Tuning
5.3. Performance and Accuracy Evaluation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, M. 1.1 Unleashing the Future of Innovation. In Proceedings of the IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 13–17 February 2021; pp. 9–16. [Google Scholar]
- Ansys—RaptorH™. Available online: www.ansys.com/products/semiconductors/ansys-raptorh (accessed on 23 June 2025).
- Phillips, J.; Daniel, L.; Silveira, L.M. Guaranteed Passive Balancing Transformations for Model Order Reduction. In Proceedings of the 39th Annual Design Automation Conference (DAC), New Orleans, LA, USA, 10–14 June 2002; pp. 52–57. [Google Scholar]
- Gugercin, S.; Antoulas, A.C. A Survey of Model Reduction by Balanced Truncation and Some New Results. Int. J. Control 2004, 77, 748–766. [Google Scholar] [CrossRef]
- Gugercin, S. An Iterative SVD-Krylov Based Method for Model Reduction of Large-Scale Dynamical Systems. Linear Algebra Appl. 2008, 428, 1964–1986. [Google Scholar] [CrossRef]
- Druskin, V.; Simoncini, V. Adaptive Rational Krylov Subspaces for Large-Scale Dynamical Systems. Syst. Control Lett. 2011, 60, 546–560. [Google Scholar] [CrossRef]
- Floros, G.; Evmorfopoulos, N.; Stamoulis, G. Frequency-Limited Reduction of Regular and Singular Circuit Models via Extended Krylov Subspace Method. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2020, 28, 1610–1620. [Google Scholar] [CrossRef]
- Giamouzis, C.; Garyfallou, D.; Stamoulis, G.; Evmorfopoulos, N. Low-Rank Balanced Truncation of RLCk Models via Frequency-Aware Rational Krylov-Based Projection. In Proceedings of the 20th International Conference on Synthesis, Modeling, Analysis and Simulation Methods and Applications to Circuit Design (SMACD), Coimbra, Portugal, 1–4 July 2024; pp. 1–4. [Google Scholar]
- Grivet-Talocia, S.; Ubolli, A. A Comparative Study of Passivity Enforcement Schemes for Linear Lumped Macromodels. IEEE Trans. Adv. Packag. 2008, 31, 673–683. [Google Scholar] [CrossRef]
- Odabasioglu, A.; Celik, M.; Pileggi, L. PRIMA: Passive Reduced-order Interconnect Macromodeling Algorithm. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 1998, 17, 645–654. [Google Scholar] [CrossRef]
- Freund, R.W. SPRIM: Structure-Preserving Reduced-Order Interconnect Macromodeling. In Proceedings of the IEEE/ACM International Conference on Computer-Aided Design (ICCAD), San Jose, CA, USA, 7–11 November 2004; pp. 80–87. [Google Scholar]
- Gugercin, S.; Antoulas, A.C.; Beattie, C. H2 Model Reduction for Large-Scale Linear Dynamical Systems. SIAM J. Matrix Anal. Appl. 2008, 30, 609–638. [Google Scholar] [CrossRef]
- Panzer, H.K. Model Order Reduction by Krylov Subspace Methods with Global Error Bounds and Automatic Choice of Parameters. Ph.D. Thesis, Technische Universität München, Munich, Germany, 2014. [Google Scholar]
- Feng, L.; Korvink, J.G.; Benner, P. A Fully Adaptive Scheme for Model Order Reduction Based on Moment Matching. IEEE Trans. Compon. Packag. Manuf. Technol. 2015, 5, 1872–1884. [Google Scholar] [CrossRef]
- Nguyen, T.S.; Le Duc, T.; Tran, T.S.; Guichon, J.M.; Chadebec, O.; Meunier, G. Adaptive Multipoint Model Order Reduction Scheme for Large-Scale Inductive PEEC Circuits. IEEE Trans. Electromagn. Compat. 2017, 59, 1143–1151. [Google Scholar] [CrossRef]
- Chatzigeorgiou, C.; Garyfallou, D.; Floros, G.; Evmorfopoulos, N.; Stamoulis, G. Exploiting Extended Krylov Subspace for the Reduction of Regular and Singular Circuit Models. In Proceedings of the 26th Asia and South Pacific Design Automation Conference (ASPDAC), Tokyo, Japan, 18–21 January 2021; pp. 773–778. [Google Scholar]
- Hamadi, M.A.; Jbilou, K.; Ratnani, A. A Model Reduction Method in Large-Scale Dynamical Systems Using an Extended-Rational Block Arnoldi Method. J. Appl. Math. Comput. 2022, 68, 271–293. [Google Scholar] [CrossRef]
- Nakatsukasa, Y.; Sète, O.; Trefethen, L.N. The AAA Algorithm for Rational Approximation. SIAM J. Sci. Comput. 2018, 40, A1494–A1522. [Google Scholar] [CrossRef]
- Bradde, T.; Grivet-Talocia, S.; Aumann, Q.; Gosea, I.V. A Modified AAA Algorithm for Learning Stable Reduced-Order Models from Data. J. Sci. Comput. 2025, 103, 14. [Google Scholar] [CrossRef]
- Lemus, A.; Ege Engin, A. AGORA: Adaptive Generation of Orthogonal Rational Approximations for Frequency-Response Data. Int. J. Circuit Theory Appl. 2025. [Google Scholar] [CrossRef]
- Ho, C.W.; Ruehli, A.E.; Brennan, P.A. The Modified Nodal Approach to Network Analysis. IEEE Trans. Circuits Syst. 1975, 22, 504–509. [Google Scholar]
- Gröchenig, K. Foundations of Time-Frequency Analysis; Birkhäuser: Boston, MA, USA, 2001. [Google Scholar]
- Golub, G.H.; Van Loan, C.F. Matrix Computations; Johns Hopkins University Press: Baltimore, MD, USA, 1983. [Google Scholar]
- Grimme, E.J. Krylov Projection Methods for Model Reduction. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Urbana, IL, USA, 1997. [Google Scholar]
- Chahlaoui, Y.; Van Dooren, P. A Collection of Benchmark Examples for Model Reduction of Linear Time Invariant Dynamical Systems; Technical Report, SLICOT Working Note 2002-2; 2002. Available online: https://eprints.maths.manchester.ac.uk/1040/ (accessed on 23 June 2025).
- Nassif, S.R. Power Grid Analysis Benchmarks. In Proceedings of the 13th Asia and South Pacific Design Automation Conference (ASPDAC), Seoul, Republic of Korea, 21–24 January 2008; pp. 376–381. [Google Scholar]
- Guennebaud, G.; Jacob, B.; Niesen, J.; Heibel, H.; Gautier, M.; Olivier, S.; Steiner, B.; Riddile, K.; Capricelli, T.; Holoborodko, P.; et al. Eigen v3. Available online: http://eigen.tuxfamily.org (accessed on 23 June 2025).
- Benner, P.; Breiten, T. Low Rank Methods for a Class of Generalized Lyapunov Equations and Related Issues. Numer. Math. 2013, 124, 441–470. [Google Scholar] [CrossRef]
- M-M.E.S.S.-3.0—The Matrix Equations Sparse Solvers Library. Available online: https://www.mpi-magdeburg.mpg.de/projects/mess (accessed on 23 June 2025).
- MORLab—sssMOR Toolbox. Available online: https://www.mathworks.com/matlabcentral/fileexchange/59169-sssmor-toolbox (accessed on 23 June 2025).
- MathWorks—Reducespec. Available online: https://www.mathworks.com/help/matlab/ref/reducespec.html (accessed on 23 June 2025).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Order | # Ports | # Mutual Ind. | ||
|---|---|---|---|---|---|
| MNA_1 | 578 | 9 | 0 | ||
| MNA_2 | 9223 | 18 | 832,068 | ||
| MNA_3 | 4863 | 22 | 1,336,054 | ||
| MNA_4 | 980 | 4 | 82,026 | ||
| ibmpg1t | 54,265 | 20 | 0 | ||
| ibmpg2t | 164,897 | 20 | 0 | ||
| ibmpg3t | 1,043,444 | 20 | 0 | ||
| ibmpg4t | 1,214,288 | 20 | 0 | ||
| PLL @ 28 GHz | 1474 | 4 | 251,680 | ||
| Mixer @ 28 GHz | 1498 | 10 | 79,794 | ||
| TI_DAC @ 28 GHz | 3869 | 160 | 365,494 | ||
| LNA @ 56 GHz | 4274 | 6 | 1,988,882 | ||
| LNA @ 28 GHz | 6956 | 6 | 5,360,490 | ||
| ILFM @ 14 GHz | 15,665 | 11 | 18,394,794 | ||
| LNA @ 2.4 GHz | 25,602 | 6 | 72,959,220 | ||
| FDIV @ 28 GHz | 59,386 | 10 | 106,236,284 |
| Model | ROM Order for Same Error | Max Error for Same Order | Reduction Time for Same Order | Memory for Same Order | ||||
|---|---|---|---|---|---|---|---|---|
| MPMM | A3PSA | MPMM | A3PSA | MPMM | A3PSA | MPMM | A3PSA | |
| MNA_1 | 207 | 243 | 0.3 s | 0.4 s | 41 MB | 45 MB | ||
| MNA_2 | 234 | 324 | 4 s | 5 s | 363 MB | 364 MB | ||
| MNA_3 | 352 | 594 | 3 s | 8 s | 306 MB | 285 MB | ||
| MNA_4 | 60 | 180 | 0.17 s | 0.25 s | 46 MB | 47 MB | ||
| ibmpg1t | 440 | 540 | 30 s | 45 s | 921 MB | 1.34 GB | ||
| ibmpg2t | 360 | 300 | 38 s | 2 min | 2.5 GB | 2.3 GB | ||
| ibmpg3t | 440 | 540 | 12 min | 16 min | 16.1 GB | 24.6 GB | ||
| ibmpg4t | 360 | 540 | 6 min | 13 min | 15.9 GB | 15.5 GB | ||
| PLL @ 28 GHz | 36 | 88 | 0.3 s | 1 s | 73 MB | 67 MB | ||
| Mixer @ 28 GHz | 60 | 180 | 0.2 s | 0.3 s | 49 MB | 56 MB | ||
| TI_DAC @ 28 GHz | 640 | 1440 | 5 s | 12 s | 255 MB | 635 MB | ||
| LNA @ 56 GHz | 108 | 138 | 2 s | 8 s | 295 MB | 271 MB | ||
| LNA @ 28 GHz | 108 | 126 | 4 s | 12 s | 675 MB | 686 MB | ||
| ILFM @ 14 GHz | 231 | 3762 | 51 s | 1 min | 1.8 GB | 2.1 GB | ||
| LNA @ 2.4 GHz | 96 | 270 | 2 min | 6 min | 7.2 GB | 7.9 GB | ||
| FDIV @ 28 GHz | 150 | 180 | 6 min | 18 min | 9.4 GB | 10.5 GB | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garyfallou, D.; Giamouzis, C.; Evmorfopoulos, N. A Multi-Point Moment Matching Approach with Frequency-Aware ROM-Based Criteria for RLCk Model Order Reduction. Technologies 2025, 13, 274. https://doi.org/10.3390/technologies13070274
Garyfallou D, Giamouzis C, Evmorfopoulos N. A Multi-Point Moment Matching Approach with Frequency-Aware ROM-Based Criteria for RLCk Model Order Reduction. Technologies. 2025; 13(7):274. https://doi.org/10.3390/technologies13070274
Chicago/Turabian StyleGaryfallou, Dimitrios, Christos Giamouzis, and Nestor Evmorfopoulos. 2025. "A Multi-Point Moment Matching Approach with Frequency-Aware ROM-Based Criteria for RLCk Model Order Reduction" Technologies 13, no. 7: 274. https://doi.org/10.3390/technologies13070274
APA StyleGaryfallou, D., Giamouzis, C., & Evmorfopoulos, N. (2025). A Multi-Point Moment Matching Approach with Frequency-Aware ROM-Based Criteria for RLCk Model Order Reduction. Technologies, 13(7), 274. https://doi.org/10.3390/technologies13070274