
A Systematic Review of Locomotion Assistance Exoskeletons: Prototype Development and Technical Challenges

 , , , , , ,
, , , , , ,
Abstract
1. Introduction
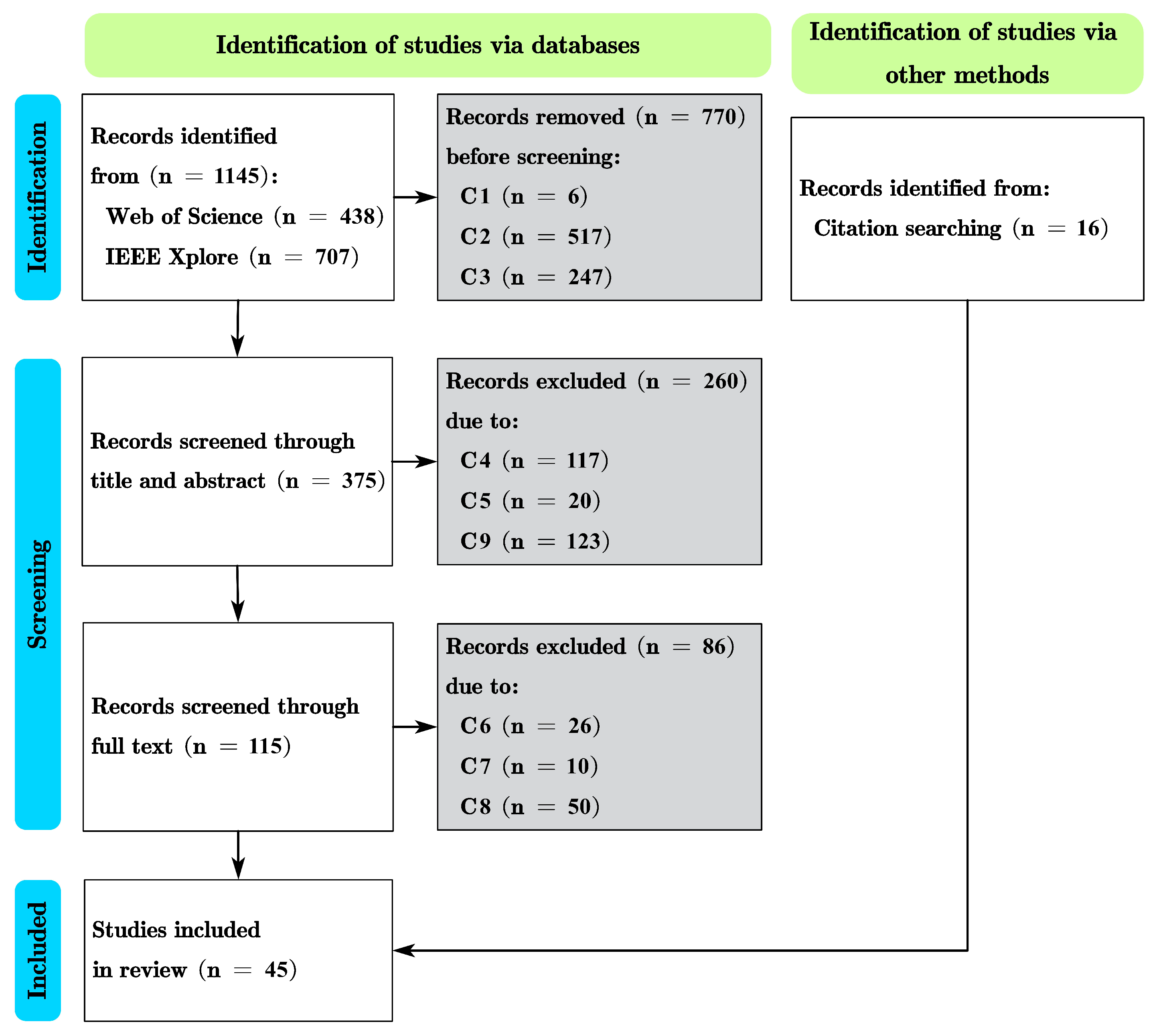
2. Method
3. Results
3.1. Rigid Exoskeleton
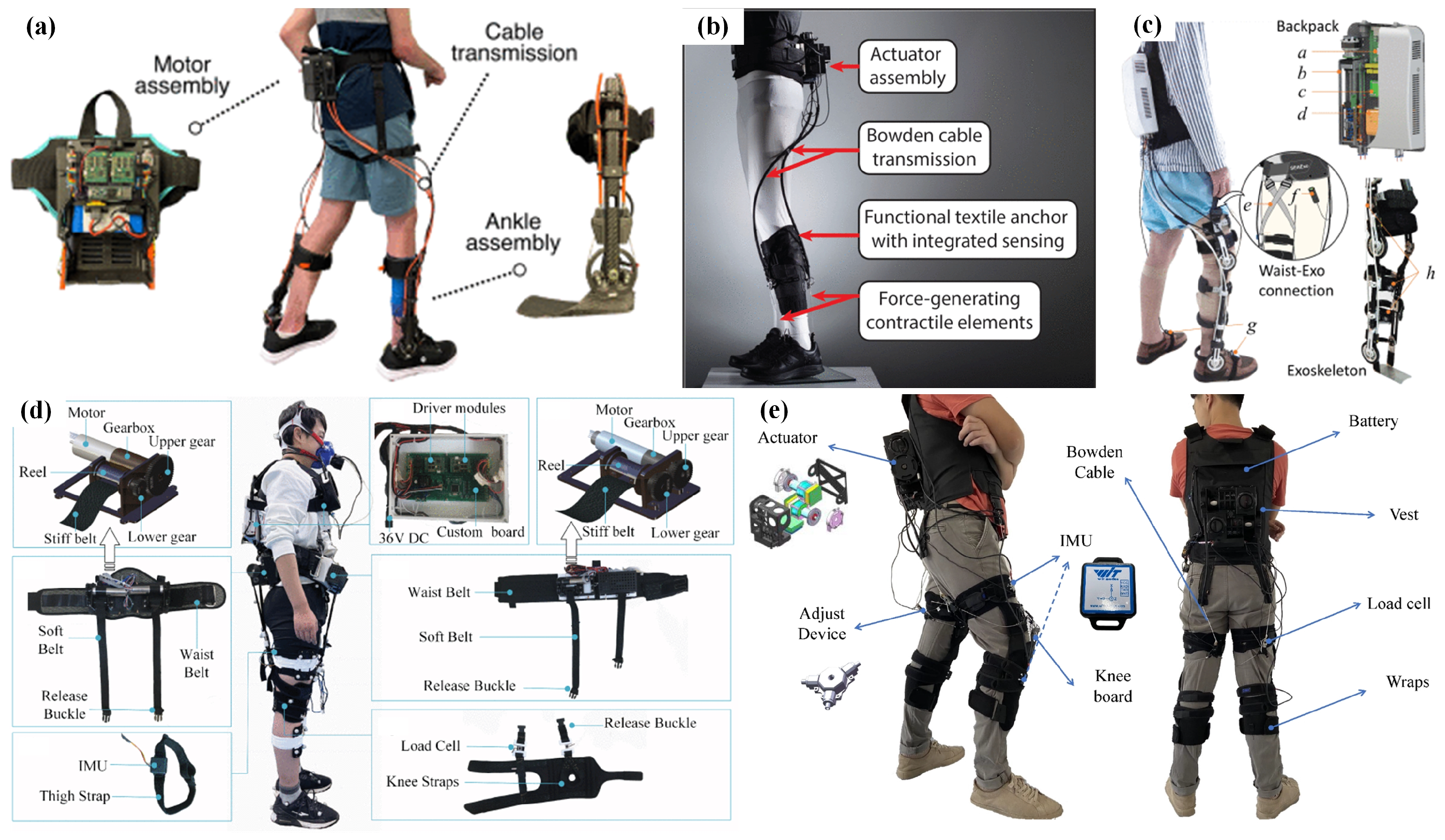
3.2. Soft Exoskeleton
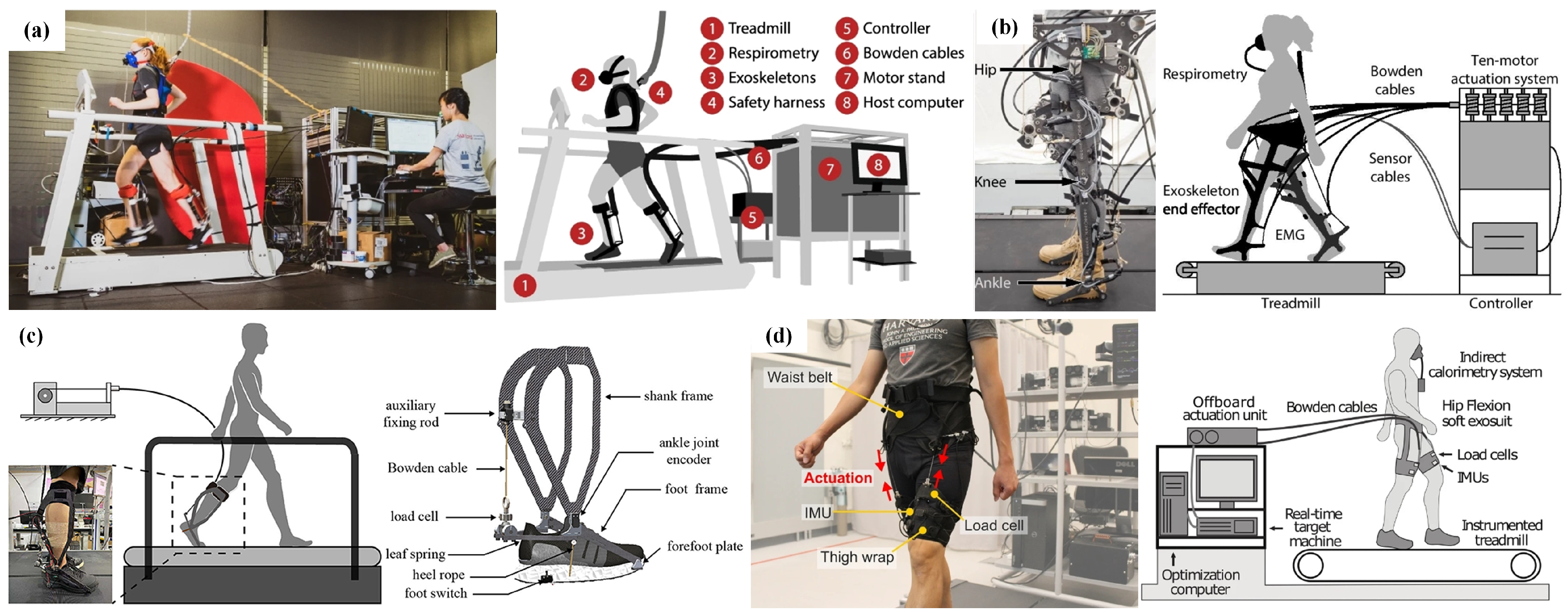
3.3. Tethered Platform
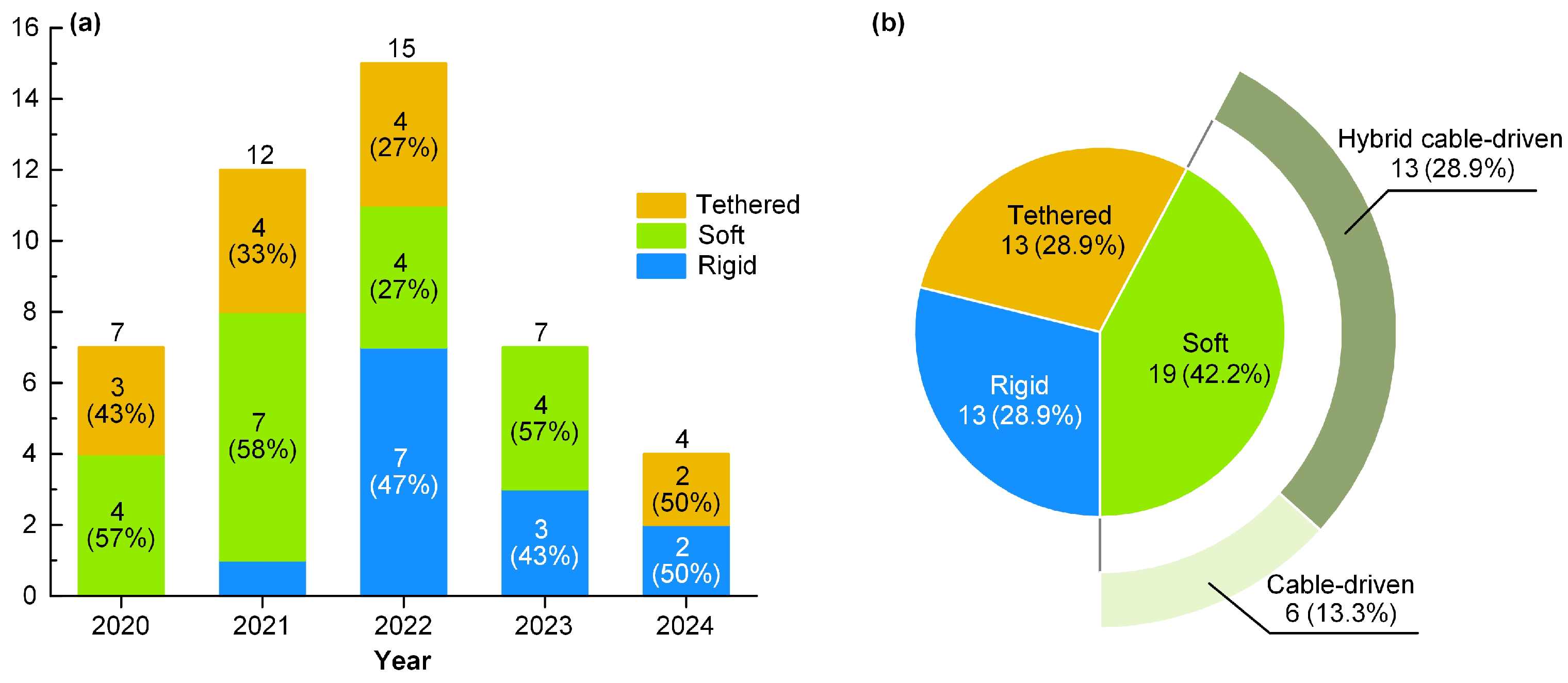
3.4. Categories and Year of First Publication
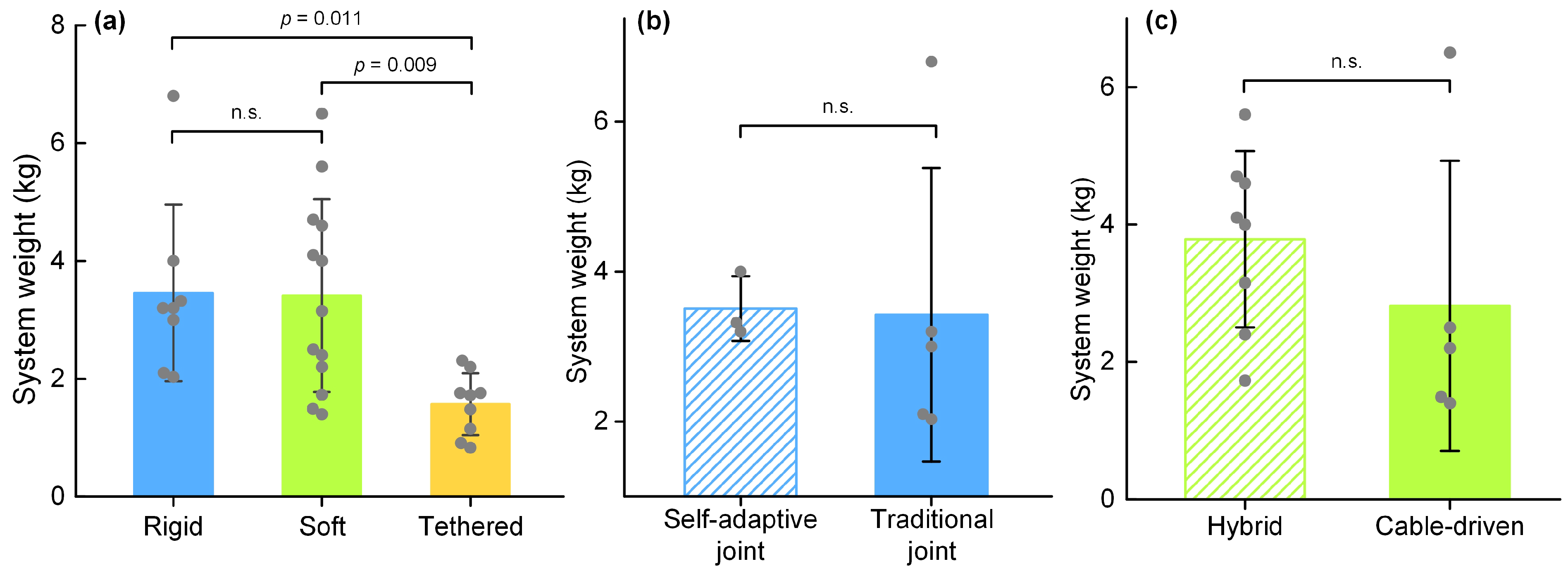
3.5. System Weight
3.6. Target Joints
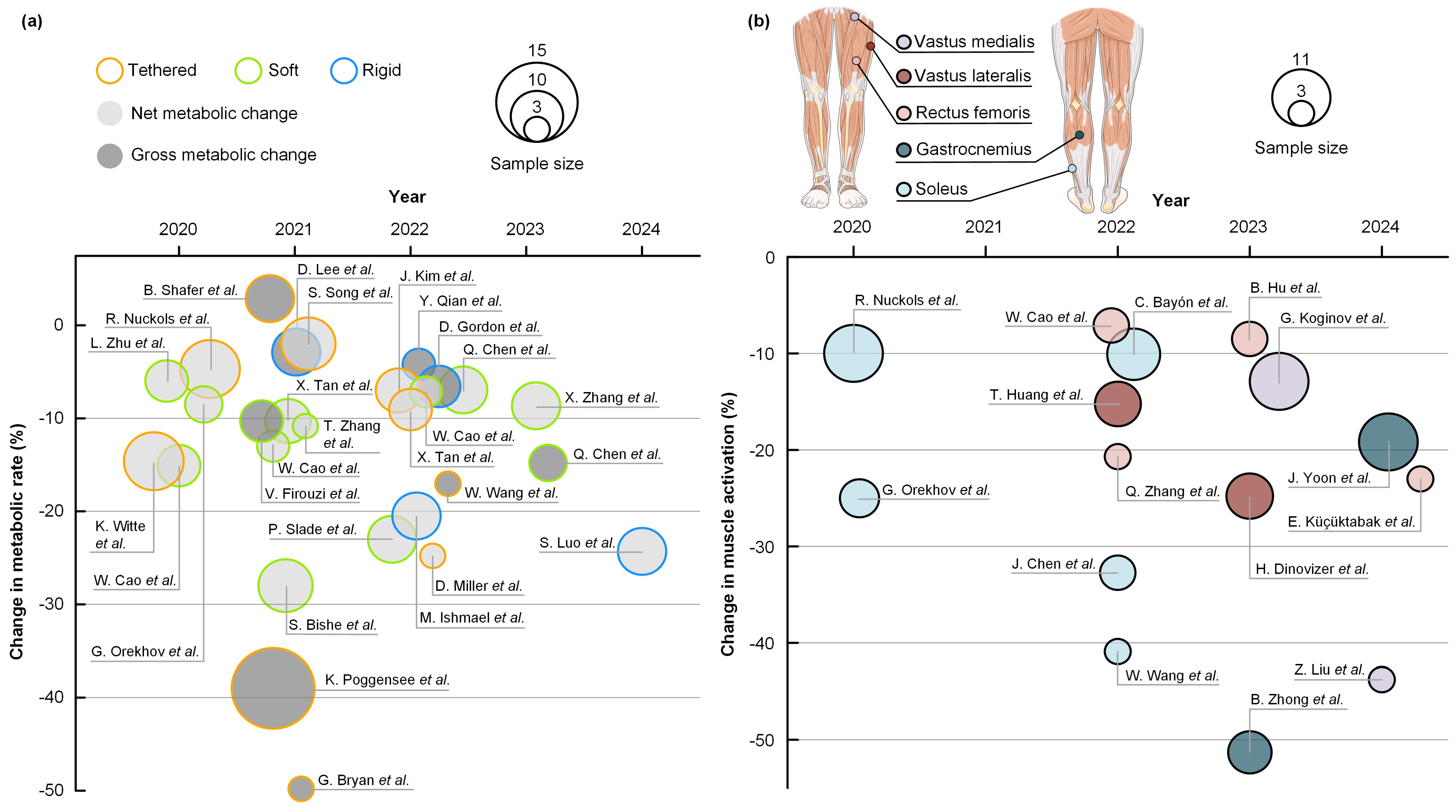
3.7. Major Effects
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Collins, S.H.; Wiggin, M.B.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef]
- Tudor-Locke, C.; Johnson, W.D.; Katzmarzyk, P.T. Accelerometer-determined steps per day in US adults. Med. Sci. Sport. Exerc. 2009, 41, 1384–1391. [Google Scholar] [CrossRef] [PubMed]
- Westerterp, K.R. Physical activity and physical activity induced energy expenditure in humans: Measurement, determinants, and effects. Front. Physiol. 2013, 4, 90. [Google Scholar] [CrossRef] [PubMed]
- McGibbon, C.A. Toward a better understanding of gait changes with age and disablement: Neuromuscular adaptation. Exerc. Sport Sci. Rev. 2003, 31, 102–108. [Google Scholar] [CrossRef] [PubMed]
- Proud, J.K.; Lai, D.T.; Mudie, K.L.; Carstairs, G.L.; Billing, D.C.; Garofolini, A.; Begg, R.K. Exoskeleton application to military manual handling tasks. Hum. Factors 2022, 64, 527–554. [Google Scholar] [CrossRef]
- Li, T.; Li, Q. A systematic review on load carriage assistive devices: Mechanism design and performance evaluation. Mech. Mach. Theory 2023, 180, 105142. [Google Scholar] [CrossRef]
- Zhuang, Z.; Guan, Y.; Xu, S.; Dai, J.S. Reconfigurability in automobiles—Structure, manufacturing and algorithm for automobiles. Int. J. Automot. Manuf. Mater. 2022, 1, 1. [Google Scholar] [CrossRef]
- Xiloyannis, M.; Alicea, R.; Georgarakis, A.M.; Haufe, F.L.; Wolf, P.; Masia, L.; Riener, R. Soft robotic suits: State of the art, core technologies, and open challenges. IEEE Trans. Robot. 2021, 38, 1343–1362. [Google Scholar] [CrossRef]
- Segura-Vega, J.; González-Herrera, A.; Molina-Bravo, R.; Solano-González, S. Computational identification and characterization of chitinase 1 and chitinase 2 from neotropical isolates of Beauveria bassiana. Front. Bioinform. 2024, 4, 1434442. [Google Scholar] [CrossRef]
- Bao, G.; Pan, L.; Fang, H.; Wu, X.; Yu, H.; Cai, S.; Yu, B.; Wan, Y. Academic review and perspectives on robotic exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2294–2304. [Google Scholar] [CrossRef]
- Fan, W.; Dai, Z.; Zhang, B.; He, L.; Pan, M.; Yi, J.; Liu, T. HyExo: A Novel Quasi-Passive Hydraulic Exoskeleton for Load-Carrying Augmentation. IEEE/ASME Trans. Mechatron. 2024. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, Q.; Liu, Y.; Wang, T.; Wan, G. A review of the design of load-carrying exoskeletons. Sci. China Technol. Sci. 2022, 65, 2051–2067. [Google Scholar] [CrossRef] [PubMed]
- Colucci, A.; Vermehren, M.; Cavallo, A.; Angerhöfer, C.; Peekhaus, N.; Zollo, L.; Kim, W.S.; Paik, N.J.; Soekadar, S.R. Brain-computer interface-controlled exoskeletons in clinical neurorehabilitation: Ready or not? Neurorehabilit. Neural Repair 2022, 36, 747–756. [Google Scholar] [CrossRef] [PubMed]
- Shepertycky, M.; Burton, S.; Dickson, A.; Liu, Y.F.; Li, Q. Removing energy with an exoskeleton reduces the metabolic cost of walking. Science 2021, 372, 957–960. [Google Scholar] [CrossRef] [PubMed]
- Siviy, C.; Baker, L.M.; Quinlivan, B.T.; Porciuncula, F.; Swaminathan, K.; Awad, L.N.; Walsh, C.J. Opportunities and challenges in the development of exoskeletons for locomotor assistance. Nat. Biomed. Eng. 2023, 7, 456–472. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Zhou, D.; Leng, Y. A Systematic Review on Rigid Exoskeleton Robot Design for Wearing Comfort: Joint Self-Alignment, Attachment Interface, and Structure Customization. IEEE Trans. Neural Syst. Rehabil. Eng. 2024, 32, 3815–3827. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Li, X.; Huang, T.H.; Yu, S.; Li, Y.; Chen, T.; Carriero, A.; Oh-Park, M.; Su, H. Comfort-centered design of a lightweight and backdrivable knee exoskeleton. IEEE Robot. Autom. Lett. 2018, 3, 4265–4272. [Google Scholar] [CrossRef]
- Zhang, Q.; Dong, W.; Xu, Q.; Goteea, B.J.; Gao, Y. FlexDelta: A flexure-based fully decoupled parallel xyz positioning stage with a long stroke. Precis. Eng. 2024, 88, 707–717. [Google Scholar] [CrossRef]
- Ingraham, K.A.; Remy, C.D.; Rouse, E.J. The role of user preference in the customized control of robotic exoskeletons. Sci. Robot. 2022, 7, eabj3487. [Google Scholar] [CrossRef] [PubMed]
- Lee, U.H.; Shetty, V.S.; Franks, P.W.; Tan, J.; Evangelopoulos, G.; Ha, S.; Rouse, E.J. User preference optimization for control of ankle exoskeletons using sample efficient active learning. Sci. Robot. 2023, 8, eadg3705. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Gao, Y.; Meng, S.; Dong, H.; Ru, C.; Dong, W. A Novel Contouring Control Method Based on Optimal Vector-Referenced Moving Frame for 3D Trajectory with Zero Curvature. IEEE Trans. Autom. Sci. Eng. 2024. [Google Scholar] [CrossRef]
- Scherb, D.; Wartzack, S.; Miehling, J. Modelling the interaction between wearable assistive devices and digital human models—A systematic review. Front. Bioeng. Biotechnol. 2023, 10, 1044275. [Google Scholar] [CrossRef] [PubMed]
- Quinlivan, B.T.; Lee, S.; Malcolm, P.; Rossi, D.M.; Grimmer, M.; Siviy, C.; Karavas, N.; Wagner, D.; Asbeck, A.; Galiana, I.; et al. Assistance magnitude versus metabolic cost reductions for a tethered multiarticular soft exosuit. Sci. Robot. 2017, 2, eaah4416. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.; Choudhury, R.; Hosseini, S.M.; Simpson, R.; Park, J.H. Myoelectric control systems for upper limb wearable robotic exoskeletons and exosuits—A systematic review. Sensors 2022, 22, 8134. [Google Scholar] [CrossRef]
- Donisi, L.; Cesarelli, G.; Pisani, N.; Ponsiglione, A.M.; Ricciardi, C.; Capodaglio, E. Wearable sensors and artificial intelligence for physical ergonomics: A systematic review of literature. Diagnostics 2022, 12, 3048. [Google Scholar] [CrossRef] [PubMed]
- Coser, O.; Tamantini, C.; Soda, P.; Zollo, L. AI-based methodologies for exoskeleton-assisted rehabilitation of the lower limb: A review. Front. Robot. AI 2024, 11, 1341580. [Google Scholar] [CrossRef]
- Lee, H.; Ferguson, P.W.; Rosen, J. Lower limb exoskeleton systems—Overview. Wearable Robot. 2020, 2020, 207–229. [Google Scholar]
- Rudnicka, A.R.; Owen, C.G. An introduction to systematic reviews and meta-analyses in health care. Ophthalmic Physiol. Opt. 2012, 32, 174–183. [Google Scholar] [CrossRef]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate health care interventions: Explanation and elaboration. Ann. Intern. Med. 2009, 151, W-65–W-94. [Google Scholar] [CrossRef]
- Meijneke, C.; Van Oort, G.; Sluiter, V.; Van Asseldonk, E.; Tagliamonte, N.; Tamburella, F.; Pisotta, I.; Masciullo, M.; Arquilla, M.; Molinari, M.; et al. Symbitron exoskeleton: Design, control, and evaluation of a modular exoskeleton for incomplete and complete spinal cord injured individuals. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 330–339. [Google Scholar] [CrossRef]
- Hu, B.; Liu, F.; Cheng, K.; Chen, W.; Shan, X.; Yu, H. Stiffness optimal modulation of a variable stiffness energy storage hip exoskeleton and experiments on its assistance effect. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 1045–1055. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Du, Z.; Dong, W.; Shen, Y.; Zhao, G. Hierarchical human machine interaction learning for a lower extremity augmentation device. Int. J. Soc. Robot. 2019, 11, 123–139. [Google Scholar] [CrossRef]
- Ishmael, M.K.; Gunnell, A.; Pruyn, K.; Creveling, S.; Hunt, G.; Hood, S.; Archangeli, D.; Foreman, K.B.; Lenzi, T. Powered hip exoskeleton reduces residual hip effort without affecting kinematics and balance in individuals with above-knee amputations during walking. IEEE Trans. Biomed. Eng. 2022, 70, 1162–1171. [Google Scholar] [CrossRef] [PubMed]
- Sarkisian, S.V.; Ishmael, M.K.; Lenzi, T. Self-aligning mechanism improves comfort and performance with a powered knee exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 629–640. [Google Scholar] [CrossRef]
- Chen, C.F.; Du, Z.J.; He, L.; Shi, Y.J.; Wang, J.Q.; Xu, G.Q.; Zhang, Y.; Wu, D.M.; Dong, W. Development and hybrid control of an electrically actuated lower limb exoskeleton for motion assistance. IEEE Access 2019, 7, 169107–169122. [Google Scholar] [CrossRef]
- Bayón, C.; Keemink, A.Q.; van Mierlo, M.; Rampeltshammer, W.; van der Kooij, H.; van Asseldonk, E.H. Cooperative ankle-exoskeleton control can reduce effort to recover balance after unexpected disturbances during walking. J. Neuroeng. Rehabil. 2022, 19, 21. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Li, Y.; Ning, C.; Zeng, B. Development and adaptive assistance control of the robotic hip exoskeleton to improve gait symmetry and restore normal gait. IEEE Trans. Autom. Sci. Eng. 2022, 21, 799–809. [Google Scholar] [CrossRef]
- Gordon, D.F.; McGreavy, C.; Christou, A.; Vijayakumar, S. Human-in-the-loop optimization of exoskeleton assistance via online simulation of metabolic cost. IEEE Trans. Robot. 2022, 38, 1410–1429. [Google Scholar] [CrossRef]
- Alili, A.; Fleming, A.; Nalam, V.; Liu, M.; Dean, J.; Huang, H. Abduction/adduction assistance from powered hip exoskeleton enables modulation of user step width during walking. IEEE Trans. Biomed. Eng. 2023, 71, 334–342. [Google Scholar] [CrossRef] [PubMed]
- Dinovitzer, H.; Shushtari, M.; Arami, A. Feedforward Control of Lower Limb Exoskeletons: Which Torque Profile Should We Use? IEEE Robot. Autom. Lett. 2023, 9, 382–389. [Google Scholar] [CrossRef]
- Barıs, E.; Wen, Y.; Kim, S.J.; Short, M.R.; Ludvig, D.; Hargrove, L.; Perreault, E.J.; Lynch, K.M.; Pons, J.L. Haptic transparency and interaction force control for a lower-limb exoskeleton. IEEE Trans. Robot. 2024, 40, 1842–1859. [Google Scholar]
- Luo, S.; Jiang, M.; Zhang, S.; Zhu, J.; Yu, S.; Dominguez Silva, I.; Wang, T.; Rouse, E.; Zhou, B.; Yuk, H.; et al. Experiment-free exoskeleton assistance via learning in simulation. Nature 2024, 630, 353–359. [Google Scholar] [CrossRef] [PubMed]
- Huang, T.H.; Zhang, S.; Yu, S.; MacLean, M.K.; Zhu, J.; Di Lallo, A.; Jiao, C.; Bulea, T.C.; Zheng, M.; Su, H. Modeling and stiffness-based continuous torque control of lightweight quasi-direct-drive knee exoskeletons for versatile walking assistance. IEEE Trans. Robot. 2022, 38, 1442–1459. [Google Scholar] [CrossRef]
- Lee, D.; McLain, B.J.; Kang, I.; Young, A.J. Biomechanical comparison of assistance strategies using a bilateral robotic knee exoskeleton. IEEE Trans. Biomed. Eng. 2021, 68, 2870–2879. [Google Scholar] [CrossRef]
- Zhang, Q.; Nalam, V.; Tu, X.; Li, M.; Si, J.; Lewek, M.D.; Huang, H.H. Imposing healthy hip motion pattern and range by exoskeleton control for individualized assistance. IEEE Robot. Autom. Lett. 2022, 7, 11126–11133. [Google Scholar] [CrossRef]
- Qian, Y.; Han, S.; Wang, Y.; Yu, H.; Fu, C. Toward improving actuation transparency and safety of a hip exoskeleton with a novel nonlinear series elastic actuator. IEEE/ASME Trans. Mechatron. 2022, 28, 417–428. [Google Scholar] [CrossRef]
- Moreno, J.C.; Vitiello, N.; Walsh, C.; Huang, H.; Mohammed, S. Introduction to the special section on wearable robots. IEEE Trans. Robot. 2022, 38, 1338–1342. [Google Scholar] [CrossRef]
- Wang, L.; Chen, C.; Li, Z.; Dong, W.; Du, Z.; Shen, Y.; Zhao, G. High precision data-driven force control of compact elastic module for a lower extremity augmentation device. J. Bionic Eng. 2018, 15, 805–819. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Chen, C.; Wang, W.; Dong, W. Development of a lower extremity wearable exoskeleton with double compact elastic module: Preliminary experiments. Mech. Sci. 2017, 8, 249–258. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, W.; Chen, W.; Bai, S.; Zhang, J.; Wang, J. Design of a passive lower limb exoskeleton for walking assistance with gravity compensation. Mech. Mach. Theory 2020, 150, 103840. [Google Scholar] [CrossRef]
- Liu, L.; Leonhardt, S.; Ngo, C.; Misgeld, B.J. Impedance-controlled variable stiffness actuator for lower limb robot applications. IEEE Trans. Autom. Sci. Eng. 2019, 17, 991–1004. [Google Scholar] [CrossRef]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. A novel intrinsically energy efficient actuator with adjustable stiffness (AwAS). IEEE/ASME Trans. Mechatron. 2011, 18, 355–365. [Google Scholar] [CrossRef]
- Wang, L.; Du, Z.; Dong, W.; Shen, Y.; Zhao, G. Intrinsic sensing and evolving internal model control of compact elastic module for a lower extremity exoskeleton. Sensors 2018, 18, 909. [Google Scholar] [CrossRef]
- Cammarata, A.; Maddio, P.D.; Sinatra, R.; Belfiore, N.P. Direct Kinetostatic analysis of a gripper with curved flexures. Micromachines 2022, 13, 2172. [Google Scholar] [CrossRef] [PubMed]
- Conner, B.C.; Orekhov, G.; Lerner, Z.F. Ankle exoskeleton assistance increases six-minute walk test performance in cerebral palsy. IEEE Open J. Eng. Med. Biol. 2021, 2, 320–323. [Google Scholar] [CrossRef]
- Awad, L.N.; Kudzia, P.; Revi, D.A.; Ellis, T.D.; Walsh, C.J. Walking faster and farther with a soft robotic exosuit: Implications for post-stroke gait assistance and rehabilitation. IEEE Open J. Eng. Med. Biol. 2020, 1, 108–115. [Google Scholar] [CrossRef] [PubMed]
- Zhong, B.; Shen, M.; Liu, H.; Zhao, Y.; Qian, Q.; Wang, W.; Yu, H.; Zhang, M. A cable-driven exoskeleton with personalized assistance improves the gait metrics of people in subacute stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2560–2569. [Google Scholar] [CrossRef]
- Chen, Q.; Guo, S.; Wang, J.; Wang, J.; Zhang, D.; Jin, S. Biomechanical and physiological evaluation of biologically-inspired hip assistance with belt-type soft exosuits. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 2802–2814. [Google Scholar] [CrossRef]
- Zhu, L.; Wang, Z.; Ning, Z.; Zhang, Y.; Liu, Y.; Cao, W.; Wu, X.; Chen, C. A novel motion intention recognition approach for soft exoskeleton via IMU. Electronics 2020, 9, 2176. [Google Scholar] [CrossRef]
- Firouzi, V.; Davoodi, A.; Bahrami, F.; Sharbafi, M.A. From a biological template model to gait assistance with an exosuit. Bioinspir. Biomim. 2021, 16, 066024. [Google Scholar] [CrossRef]
- Zhang, X.; Tricomi, E.; Missiroli, F.; Lotti, N.; Masia, L. Real-Time Assistive Control via IMU Locomotion Mode Detection in a Soft Exosuit: An Effective Approach to Enhance Walking Metabolic Efficiency. IEEE/ASME Trans. Mechatron. 2024, 29, 1797–1808. [Google Scholar] [CrossRef]
- Cao, W.; Ma, Y.; Chen, C.; Zhang, J.; Wu, X. Hardware circuits design and performance evaluation of a soft lower limb exoskeleton. IEEE Trans. Biomed. Circuits Syst. 2022, 16, 384–394. [Google Scholar] [CrossRef]
- Tricomi, E.; Lotti, N.; Missiroli, F.; Zhang, X.; Xiloyannis, M.; Müller, T.; Crea, S.; Papp, E.; Krzywinski, J.; Vitiello, N.; et al. Underactuated soft hip exosuit based on adaptive oscillators to assist human locomotion. IEEE Robot. Autom. Lett. 2021, 7, 936–943. [Google Scholar] [CrossRef]
- Tan, X.; Zhang, B.; Liu, G.; Zhao, X.; Zhao, Y. Cadence-insensitive soft exoskeleton design with adaptive gait state detection and iterative force control. IEEE Trans. Autom. Sci. Eng. 2021, 19, 2108–2121. [Google Scholar] [CrossRef]
- Zhang, T.; Feng, K.; Zeng, B.; Gong, Z. Design and validation of a lightweight soft hip exosuit with series-wedge-structures for assistive walking and running. IEEE/ASME Trans. Mechatron. 2021, 27, 2863–2874. [Google Scholar] [CrossRef]
- Cao, W.; Chen, C.; Wang, D.; Wu, X.; Chen, L.; Xu, T.; Liu, J. A lower limb exoskeleton with rigid and soft structure for loaded walking assistance. IEEE Robot. Autom. Lett. 2021, 7, 454–461. [Google Scholar] [CrossRef]
- Bishe, S.S.P.A.; Nguyen, T.; Fang, Y.; Lerner, Z.F. Adaptive ankle exoskeleton control: Validation across diverse walking conditions. IEEE Trans. Med. Robot. Bionics 2021, 3, 801–812. [Google Scholar] [CrossRef]
- Chen, J.; Han, J.; Zhang, J. Design and evaluation of a mobile ankle exoskeleton with switchable actuation configurations. IEEE/ASME Trans. Mechatron. 2022, 27, 1846–1853. [Google Scholar] [CrossRef]
- Chen, Q.; Guo, S.; Zhang, D. Force Tracking Control with Adaptive Stiffness and Iterative Position of Hip-Assistive Soft Exosuits. IEEE Trans. Autom. Sci. Eng. 2024, 21, 7203–7218. [Google Scholar] [CrossRef]
- Koginov, G.; Bergmann, L.; Xiloyannis, M.; Rohner, N.; Ngo, C.; Duarte, J.E.; Leonhardt, S.; Riener, R. Human-in-the-Loop Personalization of a Bi-Articular Wearable Robot’s Assistance for Downhill Walking. IEEE Trans. Med. Robot. Bionics 2024, 6, 328–339. [Google Scholar] [CrossRef]
- Slade, P.; Kochenderfer, M.J.; Delp, S.L.; Collins, S.H. Personalizing exoskeleton assistance while walking in the real world. Nature 2022, 610, 277–282. [Google Scholar] [CrossRef]
- Orekhov, G.; Fang, Y.; Luque, J.; Lerner, Z.F. Ankle exoskeleton assistance can improve over-ground walking economy in individuals with cerebral palsy. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 461–467. [Google Scholar] [CrossRef] [PubMed]
- Cao, W.; Chen, C.; Hu, H.; Fang, K.; Wu, X. Effect of hip assistance modes on metabolic cost of walking with a soft exoskeleton. IEEE Trans. Autom. Sci. Eng. 2020, 18, 426–436. [Google Scholar] [CrossRef]
- Gao, F.; Li, J.; Sun, G. Efficient and accurate flexible multibody dynamics modeling for complex spacecraft with integrated control applications. Acta Astronaut. 2024, 219, 818–825. [Google Scholar] [CrossRef]
- Zorkot, M.; Dac, L.H.; Morya, E.; Brasil, F.L. G-Exos: A wearable gait exoskeleton for walk assistance. Front. Neurorobot. 2022, 16, 939241. [Google Scholar]
- Lessard, S.; Pansodtee, P.; Robbins, A.; Trombadore, J.M.; Kurniawan, S.; Teodorescu, M. A soft exosuit for flexible upper-extremity rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1604–1617. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Gao, Y.; Lin, W.; He, L.; Mao, X.; Long, Y.; Dong, W. A cable-driven exosuit for upper limbs: Design, control, and evaluation. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2024, 238, 9810–9824. [Google Scholar] [CrossRef]
- Shi, Y.; Gao, Y.; Lin, W.; He, L.; Mao, X.; Long, Y.; Dong, W. Human-in-the-Loop Modeling and Control of an Upper Limb Exosuit with Tendon-Sheath Actuation. IEEE Robot. Autom. Lett. 2024, 9, 5919–5926. [Google Scholar] [CrossRef]
- Hoogkamer, W.; Kipp, S.; Spiering, B.A.; Kram, R. Altered running economy directly translates to altered distance-running performance. Med. Sci. Sport. Exerc. 2016, 48, 2175–2180. [Google Scholar] [CrossRef]
- Browning, R.C.; Modica, J.R.; Kram, R.; Goswami, A. The effects of adding mass to the legs on the energetics and biomechanics of walking. Med. Sci. Sport. Exerc. 2007, 39, 515–525. [Google Scholar] [CrossRef] [PubMed]
- Schertzer, E.; Riemer, R. Metabolic rate of carrying added mass: A function of walking speed, carried mass and mass location. Appl. Ergon. 2014, 45, 1422–1432. [Google Scholar] [CrossRef] [PubMed]
- Coifman, I.; Kram, R.; Riemer, R. Metabolic power response to added mass on the lower extremities during running. Appl. Ergon. 2024, 114, 104109. [Google Scholar] [CrossRef] [PubMed]
- Miller, D.E.; Tan, G.R.; Farina, E.M.; Sheets-Singer, A.L.; Collins, S.H. Characterizing the relationship between peak assistance torque and metabolic cost reduction during running with ankle exoskeletons. J. Neuroeng. Rehabil. 2022, 19, 46. [Google Scholar] [CrossRef] [PubMed]
- Bryan, G.M.; Franks, P.W.; Song, S.; Voloshina, A.S.; Reyes, R.; O’Donovan, M.P.; Gregorczyk, K.N.; Collins, S.H. Optimized hip-knee-ankle exoskeleton assistance at a range of walking speeds. J. Neuroeng. Rehabil. 2021, 18, 152. [Google Scholar] [CrossRef]
- Wang, W.; Chen, J.; Ding, J.; Zhang, J.; Liu, J. Improving walking economy with an ankle exoskeleton prior to human-in-the-loop optimization. Front. Neurorobot. 2022, 15, 797147. [Google Scholar] [CrossRef]
- Kim, J.; Quinlivan, B.T.; Deprey, L.A.; Arumukhom Revi, D.; Eckert-Erdheim, A.; Murphy, P.; Orzel, D.; Walsh, C.J. Reducing the energy cost of walking with low assistance levels through optimized hip flexion assistance from a soft exosuit. Sci. Rep. 2022, 12, 11004. [Google Scholar] [CrossRef] [PubMed]
- Shafer, B.A.; Philius, S.A.; Nuckols, R.W.; McCall, J.; Young, A.J.; Sawicki, G.S. Neuromechanics and energetics of walking with an ankle exoskeleton using neuromuscular-model based control: A parameter study. Front. Bioeng. Biotechnol. 2021, 9, 615358. [Google Scholar] [CrossRef]
- Nuckols, R.W.; Sawicki, G.S. Impact of elastic ankle exoskeleton stiffness on neuromechanics and energetics of human walking across multiple speeds. J. Neuroeng. Rehabil. 2020, 17, 1–19. [Google Scholar] [CrossRef]
- Yoon, J.E.; Chung, J.; Park, S.; Won, H.; Kim, C.; Baek, I.; Koh, J.S.; Koo, S.H. Evaluation of Gait-assistive soft wearable robot designs for wear comfort, focusing on electroencephalogram and satisfaction. IEEE Robot. Autom. Lett. 2024, 9, 8834–8841. [Google Scholar] [CrossRef]
- Park, E.J.; Akbas, T.; Eckert-Erdheim, A.; Sloot, L.H.; Nuckols, R.W.; Orzel, D.; Schumm, L.; Ellis, T.D.; Awad, L.N.; Walsh, C.J. A hinge-free, non-restrictive, lightweight tethered exosuit for knee extension assistance during walking. IEEE Trans. Med. Robot. Bionics 2020, 2, 165–175. [Google Scholar] [CrossRef] [PubMed]
- Tan, X.; Zhang, B.; Liu, G.; Zhao, X.; Zhao, Y. A time-independent control system for natural human gait assistance with a soft exoskeleton. IEEE Trans. Robot. 2022, 39, 1653–1667. [Google Scholar] [CrossRef]
- Liu, Z.; Han, J.; Han, J.; Zhang, J. Design and Evaluation of a Lightweight, Ligaments-Inspired Knee Exoskeleton for Walking Assistance. IEEE Robot. Autom. Lett. 2024, 9, 8491–8498. [Google Scholar] [CrossRef]
- Witte, K.A.; Fiers, P.; Sheets-Singer, A.L.; Collins, S.H. Improving the energy economy of human running with powered and unpowered ankle exoskeleton assistance. Sci. Robot. 2020, 5, eaay9108. [Google Scholar] [CrossRef] [PubMed]
- Song, S.; Collins, S.H. Optimizing exoskeleton assistance for faster self-selected walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 786–795. [Google Scholar] [CrossRef]
- Poggensee, K.L.; Collins, S.H. How adaptation, training, and customization contribute to benefits from exoskeleton assistance. Sci. Robot. 2021, 6, eabf1078. [Google Scholar] [CrossRef]
- Bryan, G.M.; Franks, P.W.; Klein, S.C.; Peuchen, R.J.; Collins, S.H. A hip-knee-ankle exoskeleton emulator for studying gait assistance. Int. J. Robot. Res. 2021, 40, 722–746. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef]
- Beck, O.N.; Shepherd, M.K.; Rastogi, R.; Martino, G.; Ting, L.H.; Sawicki, G.S. Exoskeletons need to react faster than physiological responses to improve standing balance. Sci. Robot. 2023, 8, eadf1080. [Google Scholar] [CrossRef]
- Chen, W.; Wu, S.; Zhou, T.; Xiong, C. On the biological mechanics and energetics of the hip joint muscle–tendon system assisted by passive hip exoskeleton. Bioinspir. Biomim. 2018, 14, 016012. [Google Scholar] [CrossRef] [PubMed]
- Cseke, B.; Uchida, T.K.; Doumit, M. Simulating ideal assistive strategies to reduce the metabolic cost of walking in the elderly. IEEE Trans. Biomed. Eng. 2022, 69, 2797–2805. [Google Scholar] [CrossRef]
- Vijayan, V.; Fang, S.; Reissman, T.; Reissman, M.E.; Kinney, A.L. How does added mass affect the gait of middle-aged adults? An assessment using statistical parametric mapping. Sensors 2022, 22, 6154. [Google Scholar] [CrossRef]
- Hyun, D.J.; Park, H.; Ha, T.; Park, S.; Jung, K. Biomechanical design of an agile, electricity-powered lower-limb exoskeleton for weight-bearing assistance. Robot. Auton. Syst. 2017, 95, 181–195. [Google Scholar] [CrossRef]
- Panizzolo, F.A.; Freisinger, G.M.; Karavas, N.; Eckert-Erdheim, A.M.; Siviy, C.; Long, A.; Zifchock, R.A.; LaFiandra, M.E.; Walsh, C.J. Metabolic cost adaptations during training with a soft exosuit assisting the hip joint. Sci. Rep. 2019, 9, 9779. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, A.; Dang, D.; Shi, L. Novel Lightweight Lower Limb Exoskeleton Design for Single-Motor Sequential Assistance of Knee & Ankle Joints in Real World. IEEE Robot. Autom. Lett. 2024, 9, 2391–2398. [Google Scholar]
- He, Y.; Liu, J.; Li, F.; Cao, W.; Wu, X. Design and analysis of a lightweight lower extremity exoskeleton with novel compliant ankle joints. Technol. Health Care 2022, 30, 881–894. [Google Scholar] [CrossRef] [PubMed]
- Yu, S.; Huang, T.H.; Yang, X.; Jiao, C.; Yang, J.; Chen, Y.; Yi, J.; Su, H. Quasi-direct drive actuation for a lightweight hip exoskeleton with high backdrivability and high bandwidth. IEEE/ASME Trans. Mechatron. 2020, 25, 1794–1802. [Google Scholar] [CrossRef]
- Kermavnar, T.; Power, V.; de Eyto, A.; O’Sullivan, L. Cuff pressure algometry in patients with chronic pain as guidance for circumferential tissue compression for wearable soft exoskeletons: A systematic review. Soft Robot. 2018, 5, 497–511. [Google Scholar] [CrossRef]
- Linnenberg, C.; Weidner, R. Industrial exoskeletons for overhead work: Circumferential pressures on the upper arm caused by the physical human–machine-interface. Appl. Ergon. 2022, 101, 103706. [Google Scholar] [CrossRef] [PubMed]
- Yandell, M.B.; Ziemnicki, D.M.; McDonald, K.A.; Zelik, K.E. Characterizing the comfort limits of forces applied to the shoulders, thigh and shank to inform exosuit design. PLoS ONE 2020, 15, e0228536. [Google Scholar] [CrossRef]
- Kao, P.C.; Lomasney, C.; Gu, Y.; Clark, J.P.; Yanco, H.A. Effects of induced motor fatigue on walking mechanics and energetics. J. Biomech. 2023, 156, 111688. [Google Scholar] [CrossRef]
- Hu, Z.; Ren, L.; Hu, D.; Gao, Y.; Wei, G.; Qian, Z.; Wang, K. Speed-related energy flow and joint function change during human walking. Front. Bioeng. Biotechnol. 2021, 9, 666428. [Google Scholar] [CrossRef]
- Hu, Z.; Ren, L.; Wei, G.; Qian, Z.; Liang, W.; Chen, W.; Lu, X.; Ren, L.; Wang, K. Energy flow and functional behavior of individual muscles at different speeds during human walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 31, 294–303. [Google Scholar] [CrossRef]
- Hu, X.; Ma, Z.; Zhao, F.; Guo, S. Recent Advances in Self-Powered Wearable Flexible Sensors for Human Gaits Analysis. Nanomaterials 2024, 14, 1173. [Google Scholar] [CrossRef]
- Kong, L.; Fang, Z.; Zhang, T.; Zhang, Z.; Pan, Y.; Hao, D.; Chen, J.; Qi, L. A self-powered and self-sensing lower-limb system for smart healthcare. Adv. Energy Mater. 2023, 13, 2301254. [Google Scholar] [CrossRef]
- Xie, L.; Huang, G.; Huang, L.; Cai, S.; Li, X. An unpowered flexible lower limb exoskeleton: Walking assisting and energy harvesting. IEEE/ASME Trans. Mechatron. 2019, 24, 2236–2247. [Google Scholar] [CrossRef]
- Cong, M.; Gao, Y.; Wang, W.; He, L.; Mao, X.; Long, Y.; Dong, W. A broadband hybrid energy harvester with displacement amplification decoupling structure for ultra-low vibration energy harvesting. Energy 2024, 290, 130089. [Google Scholar] [CrossRef]
- Cong, M.; Gao, Y.; Wang, W.; He, L.; Mao, X.; Long, Y.; Dong, W. Asymmetry stagger array structure ultra-wideband vibration harvester integrating magnetically coupled nonlinear effects. Appl. Energy 2024, 356, 122366. [Google Scholar] [CrossRef]
- Cong, M.; Dong, W.; Gao, Y.; Long, Y.; Wang, W.; Dong, H. A New Type of Time-varying Terminal Load Energy Harvester: Design, Simulation, and Experiments. Energy 2024, 313, 133882. [Google Scholar] [CrossRef]
- Wang, D.; Lee, K.M.; Guo, J.; Yang, C. Adaptive knee joint exoskeleton based on biological geometries. IEEE/ASME Trans. Mechatron. 2013, 19, 1268–1278. [Google Scholar] [CrossRef]
- Jabeen, S.; Berry, A.; Geijtenbeek, T.; Harlaar, J.; Vallery, H. Assisting gait with free moments or joint moments on the swing leg. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1079–1084. [Google Scholar]
- Jabeen, S.; Sterke, B.; Vallery, H.; Lemus, D. Self-induced Gyroscopic Torques in Lower Extremities During Gait: A Pilot Study. In Wearable Robotics: Challenges and Trends, Proceedings of the 5th International Symposium on Wearable Robotics, WeRob2020, and of WearRAcon Europe 2020, Online, 13–16 October 2020; Springer: Cham, Switzerland, 2022; pp. 59–62. [Google Scholar]
- Wojtara, T.; Sasaki, M.; Konosu, H.; Yamashita, M.; Shimoda, S.; Alnajjar, F.; Kimura, H. Artificial balancer—Supporting device for postural reflex. Gait Posture 2012, 35, 316–321. [Google Scholar] [CrossRef] [PubMed]
- Lemus, D.; van Frankenhuyzen, J.; Vallery, H. Design and evaluation of a balance assistance control moment gyroscope. J. Mech. Robot. 2017, 9, 051007. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, X.; Zhang, B.; Zhou, B.; He, Z.; Liu, T. An IMU-based ground reaction force estimation method and its application in walking balance assessment. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 32, 223–232. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, B.; Zhang, B.; Liu, T. A potential-real-time thigh orientation prediction method based on two shanks-mounted IMUs and its clinical application. IEEE Trans. Autom. Sci. Eng. 2022, 21, 696–705. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Exclusion Criteria |
|---|---|
| C1 | Full text not available |
| C2 | Conference, Review, Book chapter, Erratum |
| C3 | Article duplication |
| C4 | Not focused on exoskeleton for locomotion assistance |
| C5 | Non-motor-driven exoskeleton |
| C6 | Non-empirical research |
| C7 | Insufficient sample size (n < 3) |
| C8 | Experiment does not involve physiological testing |
| C9 | Studies published before 2020 |
| Study | Year of First Publication | Application | Target Joint (s) | System Weight (kg) | Major Effects | Sample Size | Self-Adaptive Joint |
|---|---|---|---|---|---|---|---|
| C. Bayón et al. [36] | 2022 | Assistance | Ankle | n.a. | EMG activity of the soleus decreased by 10.09% | 10 | No |
| T. Zhang et al. [37] | 2022 | Assistance | Hip | 3.2 | No statistically significant changes observed | 5 | Yes |
| D. Gordon et al. [38] | 2022 | Assistance | Hip | 6.8 | Gross metabolic cost decreased by 6.73% | 7 | No |
| A. Alili et al. [39] | 2023 | Assistance | Hip | n.a. | No statistically significant changes observed | 10 | No |
| B. Hu et al. [31] | 2023 | Assistance | Hip | 3.32 | EMG activity of the rectus femoris decreased by 8.5% | 5 | Yes |
| M. Ishmael et al. [33] | 2022 | Rehabilitation | Hip | 2.032 | Net metabolic cost decreased by 20.5% | 8 | No |
| H. Dinovitzer et al. [40] | 2023 | Assistance | Hip and knee | n.a. | Overall activity of lower limb muscles decreased by 25% | 9 | No |
| E. Küçüktabak et al. [41] | 2024 | Assistance | Hip and knee | 20.7 | EMG activity of the rectus femoris decreased by 23% | 3 | No |
| S. Luo et al. [42] | 2024 | Assistance | Hip | 3.2 | Net metabolic cost decreased by 24.3% | 8 | No |
| T. Huang et al. [43] | 2022 | Assistance | Knee | 2.1 | EMG activity of all eight measured knee and ankle muscles decreased by 8.6%∼15.22% | 8 | No |
| D. Lee et al. [44] | 2021 | Assistance | Knee | 1.5 each leg | Gross metabolic cost decreased by 3% | 9 | No |
| Q. Zhang et al. [45] | 2022 | Assistance | Hip | n.a. | EMG activity of the rectus femoris decreased by 20.9% | 3 | No |
| Y. Qian et al. [46] | 2022 | Assistance | Hip | 2 each leg | Gross metabolic cost decreased by 4% | 5 | Yes |
| Study | Year of First Publication | Application | Target Joint (s) | System Weight (kg) | Major Effects | Sample Size | Hybrid Cable-Driven |
|---|---|---|---|---|---|---|---|
| V. Firouzi et al. [60] | 2021 | Assistance | Hip and knee | n.a. | Gross metabolic cost decreased by 10.4% | 7 | No |
| X. Zhang et al. [61] | 2023 | Assistance | Hip | 2.5 | Gross metabolic cost decreased by 13.4%; Net metabolic cost decreased by 8.5% | 8 | No |
| B. Conner et al. [55] | 2021 | Rehabilitation | Ankle | n.a. | No statistically significant changes observed | 7 | Yes |
| W. Cao et al. [62] | 2022 | Assistance | Hip | 1.49 | EMG activity of the rectus femoris decreased by 7.1%; Net metabolic cost decreased by 7.8% | 5 | No |
| E. Tricomi et al. [63] | 2021 | Assistance | Hip | 2.2 | No statistically significant changes observed | 6 | No |
| X. Tan et al. [64] | 2021 | Assistance | Ankle | 6.5 | Net metabolic cost decreased by 10.3% | 8 | No |
| T. Zhang et al. [65] | 2021 | Assistance | Hip | 1.4 | Net metabolic cost decreased by 10.9% | 3 | No |
| W. Cao et al. [66] | 2021 | Assistance | Hip | 5.6 | Net metabolic cost decreased by 12.8% | 5 | Yes |
| S. Bishe et al. [67] | 2021 | Rehabilitation | Ankle | n.a. | Net metabolic cost decreased by 28% | 10 | Yes |
| J. Chen et al. [68] | 2022 | Assistance | Ankle | 3.15 | EMG activity of the soleus decreased by 32.5% | 5 | Yes |
| Q. Chen et al. [69] | 2023 | Assistance | Hip | n.a. | Gross metabolic cost decreased by 14.8% | 6 | Yes |
| L. Awad et al. [56] | 2020 | Rehabilitation | Ankle | 4.6 | No statistically significant changes observed | 6 | Yes |
| Q. Chen et al. [58] | 2022 | Assistance | Hip | 4.7 | Net metabolic cost decreased by 7% | 8 | Yes |
| B. Zhong et al. [57] | 2023 | Rehabilitation | Knee and ankle | 4.5 | EMG activity of the gastrocnemius decreased by 51.3% | 7 | Yes |
| G. Koginov et al. [70] | 2023 | Assistance | Knee | 4.3 | EMG activity of three extensor muscles decreased by 12.67% | 11 | Yes |
| P. Slade et al. [71] | 2022 | Assistance | Ankle | 1.2 each leg | Net metabolic cost decreased by 23% | 9 | Yes |
| G. Orekhov et al. [72] | 2020 | Rehabilitation | Ankle | 1.73 | Net metabolic cost decreased by 8.5%; EMG activity of the soleus decreased by 25% | 6 | Yes |
| W. Cao et al. [73] | 2020 | Assistance | Hip | 4 | Net metabolic cost decreased by 15.28% | 7 | Yes |
| L. Zhu et al. [59] | 2020 | Assistance | Hip and knee | n.a. | Net metabolic cost decreased by 5.79% | 7 | Yes |
| Study | Year of First Publication | Application | Target Joint (s) | System Weight (kg) | Major Effects | Sample Size |
|---|---|---|---|---|---|---|
| B. Shafer et al. [87] | 2021 | Assistance | Ankle | n.a. | Gross metabolic cost increased by 4.4% | 9 |
| R. Nuckols et al. [88] | 2020 | Assistance | Ankle | 0.415 each leg | EMG activity of the soleus decreased by 10%; Net metabolic cost decreased by 4.7% | 11 |
| J. Yoon et al. [89] | 2024 | Assistance | Ankle | n.a. | EMG activity of the gastrocnemius decreased by 19.18% | 11 |
| E. Park et al. [90] | 2020 | Assistance | Knee | 1.72 | No statistically significant changes observed | 6 |
| X. Tan et al. [91] | 2022 | Assistance | Ankle | 0.91 | Net metabolic cost decreased by 9.06% | 7 |
| Z. Liu et al. [92] | 2024 | Assistance | Knee | 0.74 each leg | EMG activity of the vastus medialis decreased by 44.0% | 3 |
| K. Wltte et al. [93] | 2020 | Assistance | Ankle | 0.88 each leg | Net metabolic cost decreased by 14.6% | 11 |
| D. Miller et al. [83] | 2022 | Assistance | Ankle | 1.1 each leg | Net metabolic cost decreased by 24.8% | 3 |
| S. Song et al. [94] | 2021 | Assistance | Ankle | n.a. | Net metabolic cost decreased by 2% | 10 |
| W. Wang et al. [85] | 2022 | Assistance | Ankle | 0.577 each leg | Gross metabolic cost decreased by 17.1%; EMG activity of the soleus decreased by 40.9% | 3 |
| K. Poggensee et al. [95] | 2021 | Assistance | Ankle | 0.88 each leg | Gross metabolic cost decreased by 39% | 15 |
| G. Bryan et al. [84] | 2021 | Assistance | Hip, knee and ankle | 13.5 | Gross metabolic cost decreased by 50% | 3 |
| J. Kim et al. [86] | 2022 | Assistance | Hip | 2.31 | Net metabolic cost decreased by 7.2% | 8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, W.; Dong, H.; Gao, Y.; Wang, W.; Long, Y.; He, L.; Mao, X.; Wu, D.; Dong, W. A Systematic Review of Locomotion Assistance Exoskeletons: Prototype Development and Technical Challenges. Technologies 2025, 13, 69. https://doi.org/10.3390/technologies13020069
Lin W, Dong H, Gao Y, Wang W, Long Y, He L, Mao X, Wu D, Dong W. A Systematic Review of Locomotion Assistance Exoskeletons: Prototype Development and Technical Challenges. Technologies. 2025; 13(2):69. https://doi.org/10.3390/technologies13020069
Chicago/Turabian StyleLin, Weiqi, Hui Dong, Yongzhuo Gao, Wenda Wang, Yi Long, Long He, Xiwang Mao, Dongmei Wu, and Wei Dong. 2025. "A Systematic Review of Locomotion Assistance Exoskeletons: Prototype Development and Technical Challenges" Technologies 13, no. 2: 69. https://doi.org/10.3390/technologies13020069
APA StyleLin, W., Dong, H., Gao, Y., Wang, W., Long, Y., He, L., Mao, X., Wu, D., & Dong, W. (2025). A Systematic Review of Locomotion Assistance Exoskeletons: Prototype Development and Technical Challenges. Technologies, 13(2), 69. https://doi.org/10.3390/technologies13020069