6.1. Incremental Controllers
In order to illustrate the application of these two design techniques (WOF and ISG), we present first the concept of incremental dynamics (ID) and incremental controllers.
In the last two decades, researchers have studied the classical Nonlinear Dynamics Inversion (NDI), also known as feedback linearization, as a promising approach to unify the control scheme of an Unmanned Aerial Vehicles (UAV) during the different phases of a standard flight plan [
24,
25,
26].
To cancel model nonlinearites, NDI controllers require a complete and precise model of the system. However, in real-world systems, realistic dynamic models with accurate parameters are almost impossible to be obtained. Firstly presented in [
27], the incremental controlleres (ID) was used for designing a simplified version of Nonlinear Dynamic Inversion. Later this strategy was named as Incremental Nonlinear Dynamic Inversion (INDI) [
28]. Since then, several works use Incremental Dynamics (ID) for designing nonlinear control laws. As some examples, in [
29], the authors use ID for designing Incremental Backstepping (IBKS). In [
30], ID is used for design the Incremental Sliding-Mode (ISM) control law.
As a first step, let us present the concept of incremental dynamics [
28]. Consider a control affine nonlinear system in state space representation:
where
is the vector of state variables,
is the vector of control inputs,
is the output vector, and
are real analytic Lipschitz continuous functions.
The system dynamics (
31a) can be approximated by its Taylor series expansion around
and
:
where
and
are respectively the state, the state derivative, and input at current time
t and some previous time
,
includes the higher order terms of the Taylor expansion, and
are state-dependent matrices that capture the linear system dynamics relationship with the state and input variables, respectively.
One of the key points in incremental controllers is that we assume that the time interval
elapsed between
and
is sufficiently small, such that we can suppose
, and thus the system dynamics (
32) can be approximated by the so-called incremental dynamics formulation:
yielding the current state derivative from the knowledge of its value at the previous time step and the input increment
.
Incremental controllers such as IBKS [
29], ISM [
30] and INDI [
14] are sensor-based controllers, taking advantage of the simplified dynamics (
34), where the use of state dependent dynamics is replaced by the measurement of the previous time derivative
.
INDI is the equivalent of the well known NDI control applied to the incremental dynamics (
34).
Let us impose a desired dynamics
. Then, the incremental dynamic inversion results in the following control law:
where
is the identity matrix of order
n.
Note that if the matrix inversion is perfect then, replacing the control law in the incremental dynamic equation gives
which shows that:
the system modes are decoupled, allowing the design of independent linear controllers for each of them.
the state derivative tracks the dynamics imposed by ;
the previous state derivatives, and consequently their nonlinearities, are canceled (DI is also called feedback linearization);
Taking advantage of the above, we can define as a pseudo-control signal, which is usually taken as a linear state feedback. Imposing a linear dynamics, the feedback gain places the closed loop poles, designing the desired response. As it is common sense in cascade control, a Time Scale Separation Principle (TSSP) must be respected, and the INDI loop must converge faster than the linear control loop. In addition, the implementation of incremental controller considers the following assumptions:
- A6.1
The system is output controllable (
34), and any internal dynamics are intrinsically stable in closed-loop.
- A6.2
States are sampled at a sufficiently high frequency when compared with system dynamics.
- A6.3
Fast control action in comparison to the system modes.
- A6.4
The control signals and state references are measurable, continuous and bounded. Additionally, accurate information on the state derivatives and actuator variables is available.
- A6.5
The input matrix has known coefficient signals, and it is non-singular around the region of interest.
Since all assumptions of Incremental controllers are satisfied we can define the INDI control law (
35) for the system in (
31a).
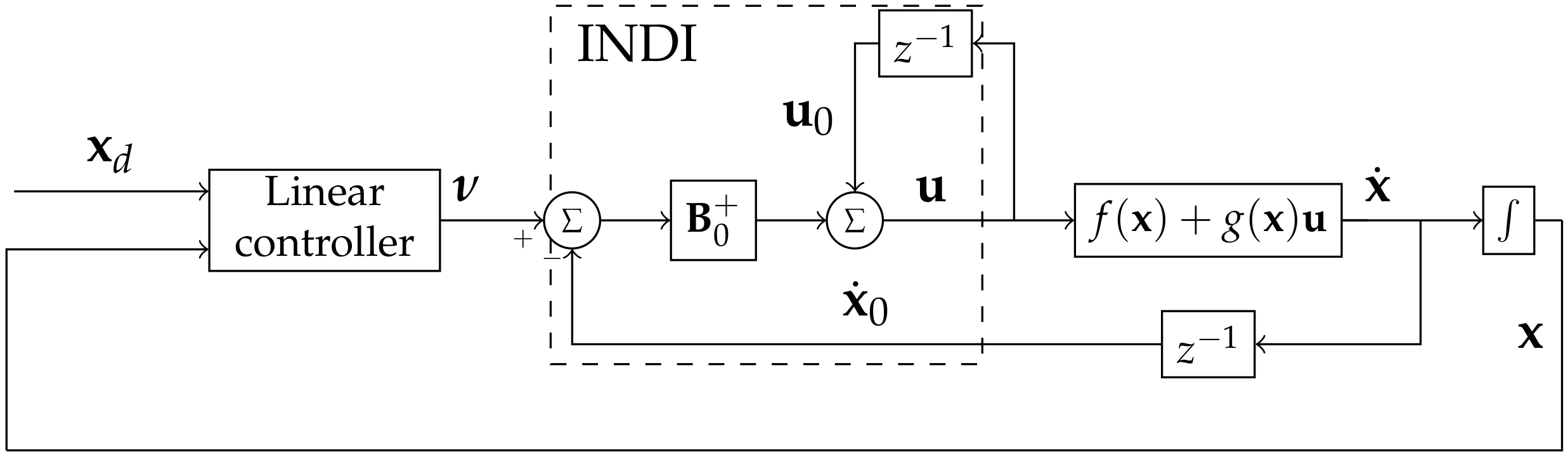
Figure 7 shows a typical block diagram of a sensor based INDI control, where
represents a delay of one sample time.
One of the most important advantages of using incremental controllers, which makes it a successfull candidate for real applications, is the great robustness to model parameters. The most common control approaches are said to be model based, for their design being strongly dependent on the system dynamics model. This aspect requires the definition of an accurate mathematical representation, as well as a careful system identification process. Nevertheless, the resulting model will still be subject to noise, disturbances and remaining model uncertainties.
The approach based on the incremental dynamics on its hand requires only the identification of the input matrix, neglecting the parameters that depend exclusively on the internal states and it is expected to be robust to model uncertainties. Furthermore, the incremental formulation is very simple and intuitive, supported on well established mathematical fundamentals, with only a few parameters to set-up.
On the other hand, restrictions on the use of incremental controllers arise out of assumptions A6.1 to A6.5. Initially, as a consequence of the model simplifications, all the needed information about the system states is obtained from measurements. Thus, to ensure quality in the measurements, the feedback states and state derivatives are to be updated at a sufficiently high sampling rate, with good quality sensors. Furthermore, A6.3 implies that input control signal must have dominance on the system dynamics, demanding fast actuation when compared with system modes. These assumptions are satisfied in the most of UAVs since the control actuation has the greater influence over the dynamics.
In the following subsections we present and analyze the two techniques (WOF and ISG) proposed to mitigate the filtering design problems of input redundancy and second-order filtering delay. The results are illustrated through numerical examples considering an application for the INDI control.
6.2. Input Redundancy Treatment
If we consider that the input matrix
from (
35) may not be square, we can expect an input redundancy to occur. Therefore, there are various possible solutions of inputs
that achieve a given equilibrium point
. A common issue is that the redundant inputs can cancel each other when the system achieves a stationary state condition, resulting in more energy consumption.
As an example, consider a simplified vehicle dynamics with a single state variable
x given by the longitudinal velocity and two inputs
and
. This system dynamics can be represented by the following mathematical modeling:
Both control inputs
and
have influence over the vehicle velocity dynamics. Now consider an equilibrium point
, thus
and the following can be stated:
where
and
are positive constants.
In this case, there are many choices for and resulting in the same constant longitudinal velocity . However, this choice will impact in the energy consumption. The ideal solution is to use the minimal control effort in order to save energy.
One solution for this problem is to perform a filtering in the commanded redundant input which is less important for maintaining the equilibrium point. As a result we obtain a system dynamics described in the following form:
where
is the filtered commanded input for the brake. By imposing this dynamics,
will naturally converge to zero and
will also reduce, once
is no longer canceling it. Note that
is still useful for the transient state condition when the vehicle needs to slowdown fast. This strategy is commonly referenced in the literature as Washout Filter (WOF) [
13].
The solution can be extended for systems with Multiple Inputs and Multiple Outputs (MIMO). Consider the following generalized MIMO system dynamics:
where
,
and
.
Thus, applying the WOF to the redundant inputs we obtain the following extended dynamics:
where:
,
is the vector of states;
is the vector of main actuators;
is the vector of secondary (or redundant) actuators;
is the vector of filtered input signals,
is the function of state dynamics;
is a function which describes the influence of
in the state dynamics;
is a function which describes the influence of
in the state dynamics;
is a diagonal matrix with positive constants
chosen by the designer;
is the identity matrix of order
n; and
is a matrix full of zeros with
n lines and
l columns.
The vector of redundant actuators can be chosen by analyzing the input function
through a systematic procedure. First, the designer must linearize
in a chosen point
, obtaining the following:
By analyzing the matrix
, the designer must identify the linearly dependent columns, which indicates the redundant inputs. After identifying the redundant actuators, the designer must choose and separate between main (
) and secondary (
) actuators, by also defining the functions
and
. Then the extended dynamics (
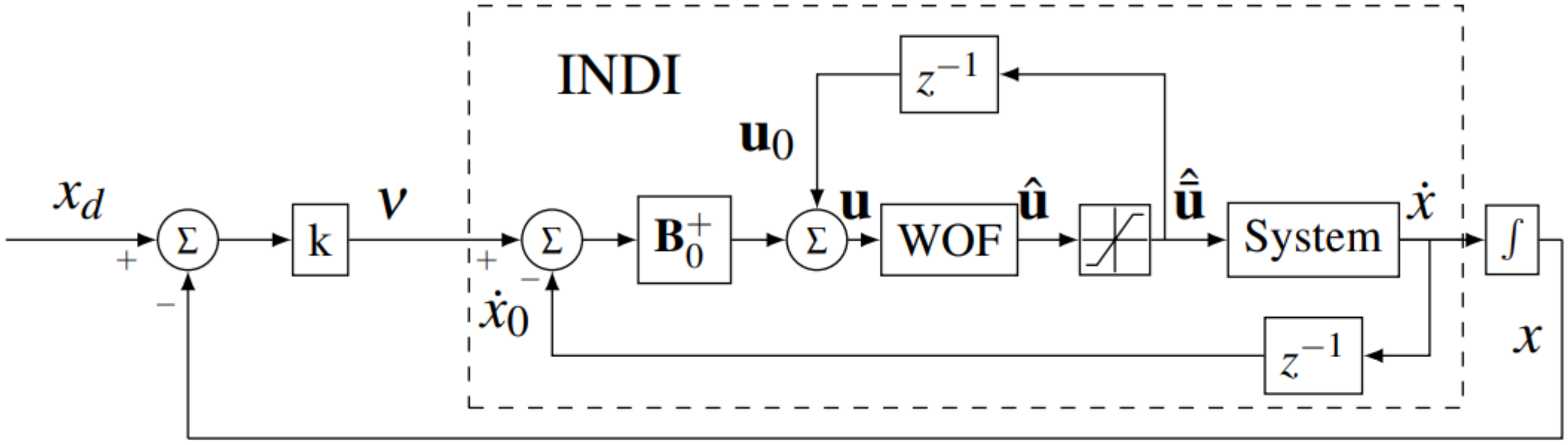
41) can be applied. This solution can be represented by a block diagram in a cascaded form as shown in
Figure 8, where
and
.
Numerical Example
As an example consider the following linear system with two redundant inputs:
where
x is the state,
is the first input and
is the second input.
By applying INDI, we obtain the following control law:
where
,
,
is the previous input and
is a desired dynamics of first order. The block diagram in
Figure 8 illustrates the closed loop system, where
represents a delay of one sample time
seconds,
is the control signal filtered by the WOF,
is a linear gain and
seconds is the time constant of the WOF. We suppose the presence of actuator saturation (
and
,) which is treated with an anti-windup strategy [
3].
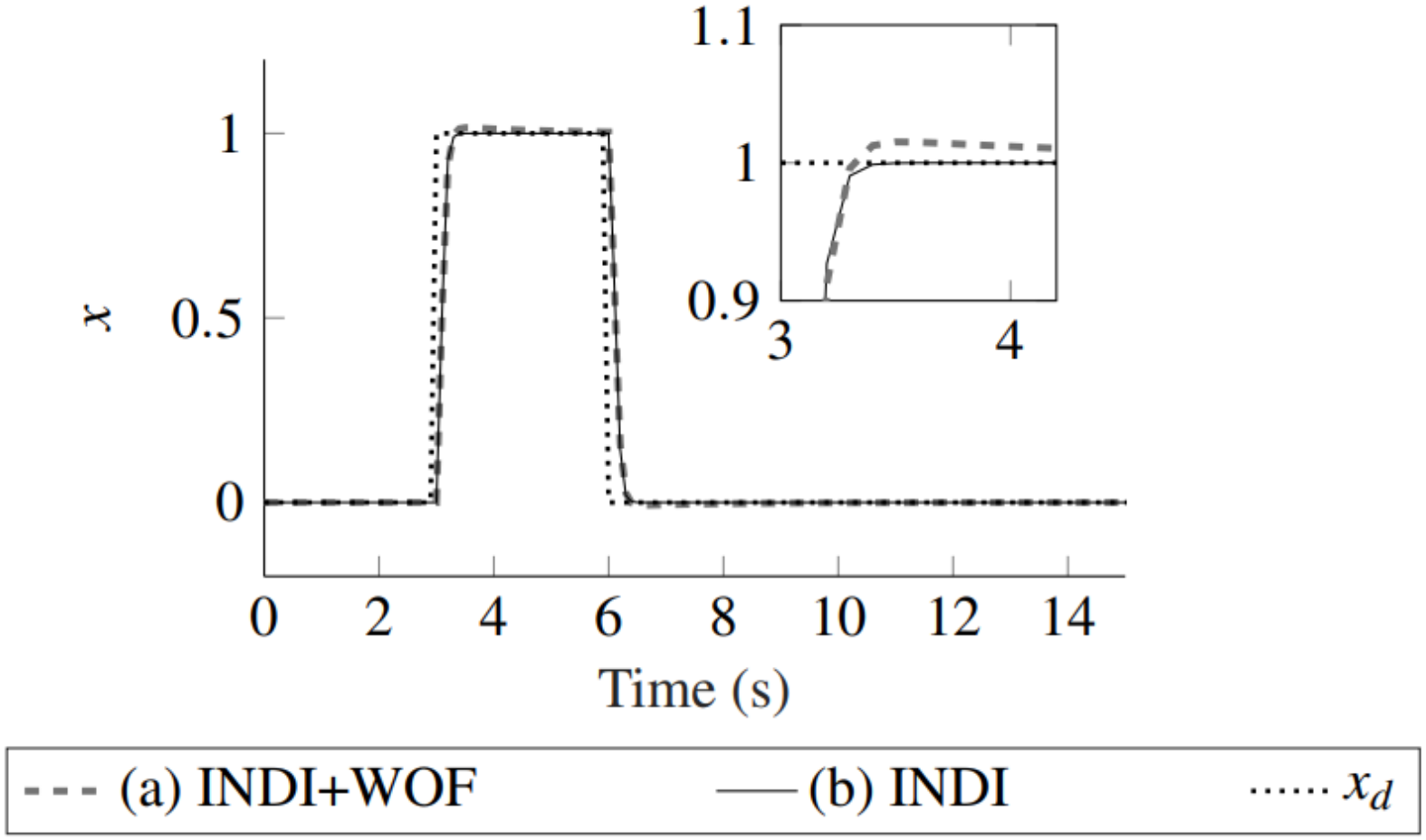
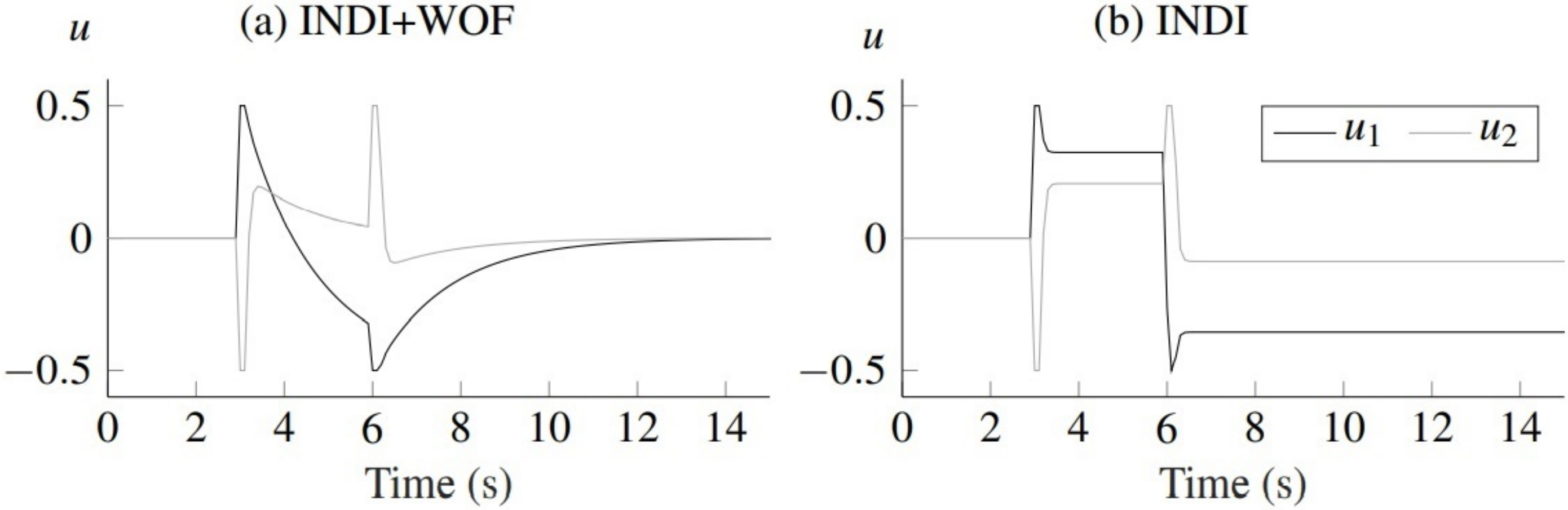
Figure 9 and
Figure 10 show the results for a step in
using WOF denominated case (a) (or “INDI+WOF”) and without WOF denominated case (b) (or “INDI”). For sake of comparison consider the following quadratic cost function:
where
seconds is the final time of simulation.
From the figures, we see that the tracking performance is similar for both cases, which does not happen for the control effort. In
Figure 10, the saturation is achieved in both control inputs for both cases (a) and (b). In case (b) the commanded signals
and
converge to values different from zero after the transient state (
seconds). Consequently the system has higher energy consumption in case (b) with
. In case (a) the energy consumption is reduced to
. Therefore, the WOF appears as a simple and advantageous solution for systems with redundant actuation with actuator saturation, such as aerial vehicles i.e. multirotor drones, aircrafts and airships.
6.3. The Second-Order Differentiator and the Estimation of Derivatives
One important problem in control design, not limited to incremental controllers, is the need for the derivative of a given state. They may be difficult to obtain or even impossible, as is the case of the derivative of angular rates. Further, direct numerical differentiation of the output signal may lead to noise amplification and abrupt variations.
A common solution to this problem is the use a Second-Order Differentiator (SOD) to obtain the derivative of the state. The SOD works as a low-pass filter for the state yielding a filtered output of the measure . While providing an estimation of the state derivative, the SOD simultaneously attenuates the high-frequency noise in the measure signal.
If we call the state derivative vector as
, the estimation of the derivative
, using the second-order-derivative (SOD), is given by:
In the design procedure, the filter parameters like the natural frequency and the damping ratio are used to adjust the passband mid-frequency, as well as the passband size.
6.4. Input Scaling Gain
A drawback that comes with the SOD filter is the natural delay produced by the second order dynamics, which may harm the control system feedback. Thus, it is important to mitigate this delayed estimation in order to robustify the controller.
One possible solution to this issue is the so called Input Scaling Gain (ISG), that was first proposed by our research group in 2015 [
14], as a scalar factor. In this paper, we propose the generalization of the scale gain to MIMO systems, using a diagonal matrix
. In the case of the incremental controller design, the ISG is used to scale down the difference
in (
35), reducing the bandwidth of the closed-loop system. The matrix diagonal elements
are real numbers in the interval
, such that the modified INDI control law is now given as:
Note that with
we have the traditional INDI control law (
35).
Substituting (
47) in the closed loop Incremental Dynamics (
34) results in:
Considering the discrete implementation, where the time interval between
and
t is
, we can rewrite (
48) as:
Assuming a fast sampling rate (small
), and denoting
as
, (
49) approximates to:
Considering
, (
50) can be rewritten as:
Applying Laplace transform to (
51), provides the transfer function between the state derivative and the pseudo-control as:
Some important points to be remarked are:
each component of of pseudo-control has an independent time constant , as the scale matrix is a diagonal matrix.
Under fast sampling, we can assume
implying that (
52) simplifies to a simple first order low-pass filter, attenuating high-frequency perturbations in the pseudo-control
;
as a possible drawback, the ISG reduces the bandwidth of the closed-loop dynamics, eventually decreasing the overall performance;
6.5. Combining ISG and SOD: Closed-Loop Analysis
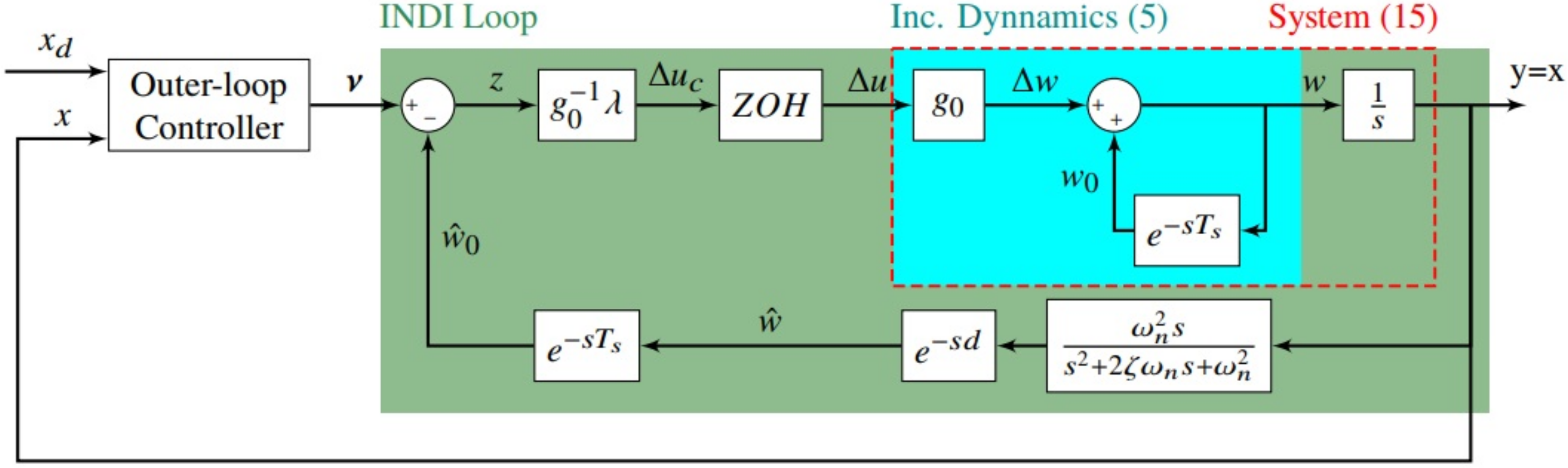
In order to investigate the stability properties as well as the performance improvements against delays in the closed-loop system, we analyze here the proposed SOD+ISG solution for a first-order SISO system, as shown in
Figure 11.
Although illustrated here for a SISO system, the approach can be extended to multiple-input-multiple-output (MIMO) systems as the diagonal structure of the ISG yields independent components of the INDI-loop error , and the SOD is also independent for each state .
Firstly, to consider continuous systems, the discrete sample delays
of INDI (see
Figure 7) are substituted by time delay components
. Further, to simulate the discrete feature of INDI we add a Zero-Order Hold (ZOH) in the control loop, as well as an extra transport delay
d to investigate the effects of additional unmodeled delays in the loop.
6.5.1. Analytical Formulation
The system to be controlled is defined as:
where its dynamics is described using ID formulation (
34), and its output is the state itself.
In this section we only analyze the local behavior of the system, where the control effectiveness function is approximated by a constant .
The transfer function
relating the state derivative
w with the input increment
is given (
34) by:
and, thus, the transfer function
is given (
53) by:
One important feature of the INDI controller, as shown in (
36), is that the state derivative
w should follow a given pseudo-control
. Therefore, it is important to analyze the transfer function from
to
w, denoted here as
, shown in the block diagram of
Figure 11, and given by:
where
is the zero-order-holder.
Substituting (
54), (
55), and
into (
56), we finally come to the transfer function from
to
w as:
Note that (
57) is a delayed system where the delay appears in the constant term of the characteristic equation, such that the simple first-order Padé approximation
can be used to investigate the stability analysis of the closed-loop system.
The resulting transfer function
is finally approximated to:
From which we can conclude that:
As desired in the INDI approach, w will follow a pseudo control , due to the fact that the transfer function has unitary dc-gain;
Considering the Routh–Hurwitz criterion, will be stable for positive coefficients in the characteristic polynomial, which implies that ;
Further, the ISG is also effective to mitigate the effects of additional delays in the closed-loop. For example, without the use of ISG (), the extra delay should never be greater than the sample time .
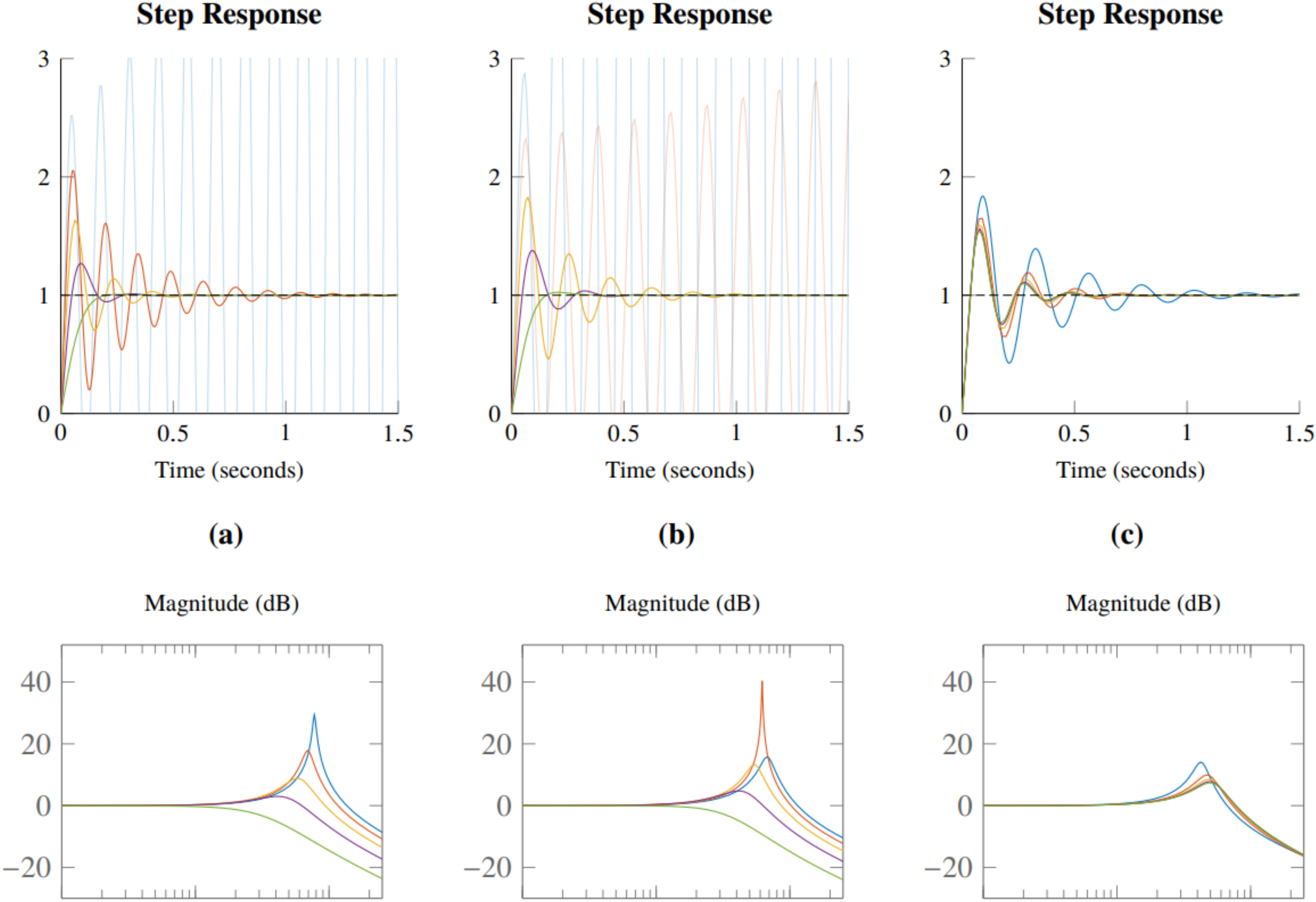
6.5.2. Numerical Example
A numerical example is presented here to investigate the effect of the ISG gain and the SOD differentiator approach in the control loop. To investigate the role of the delay in the INDI control, let us analyze the scenario in which there is an extra delay
in the INDI feedback loop.
Figure 12 shows the results for the step inputs applied to
and the corresponding Bode plots, assuming a sampling frequency of 50 Hertz.
The simulations were done for three diferent conditions: a) Varying ISG scale gains for a given measured state derivative (note that lower implies lower natural frequency and bigger damping ratio); b) Varying ISG scale gains for a differentiator with a given natural frequency of ; and c) Varying the natural frequencies of the differentiators for a fixed ISG gain equal to 0.5.
The step response plots, without using the ISG (equivalent to ), shows that the system is unstable for this plant that has an extra delay d larger than the sample time . However, the system becomes stable if a lower value of is considered. For the case where the bandwidth of the differentiator satisfies the relation , the extra delay d added by the filter destabilizes the system even if we use an ISG gain of 0.8, while an ISG gain of 0.5 is sufficient to make it stable for different SOD frequencies.
From these results, we conclude that the combined approach SOD + ISG yields a useful and practical derivative estimator, since the ISG can mitigate the effects of the delay generated by the second-order differentiator. Additionally, we remark that it can even mitigate other possible delays appearing in the feedback loop.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}