
Attitude Autopilot Design Based on Fuzzy Linear Active Disturbance Rejection Control



Abstract
:1. Introduction
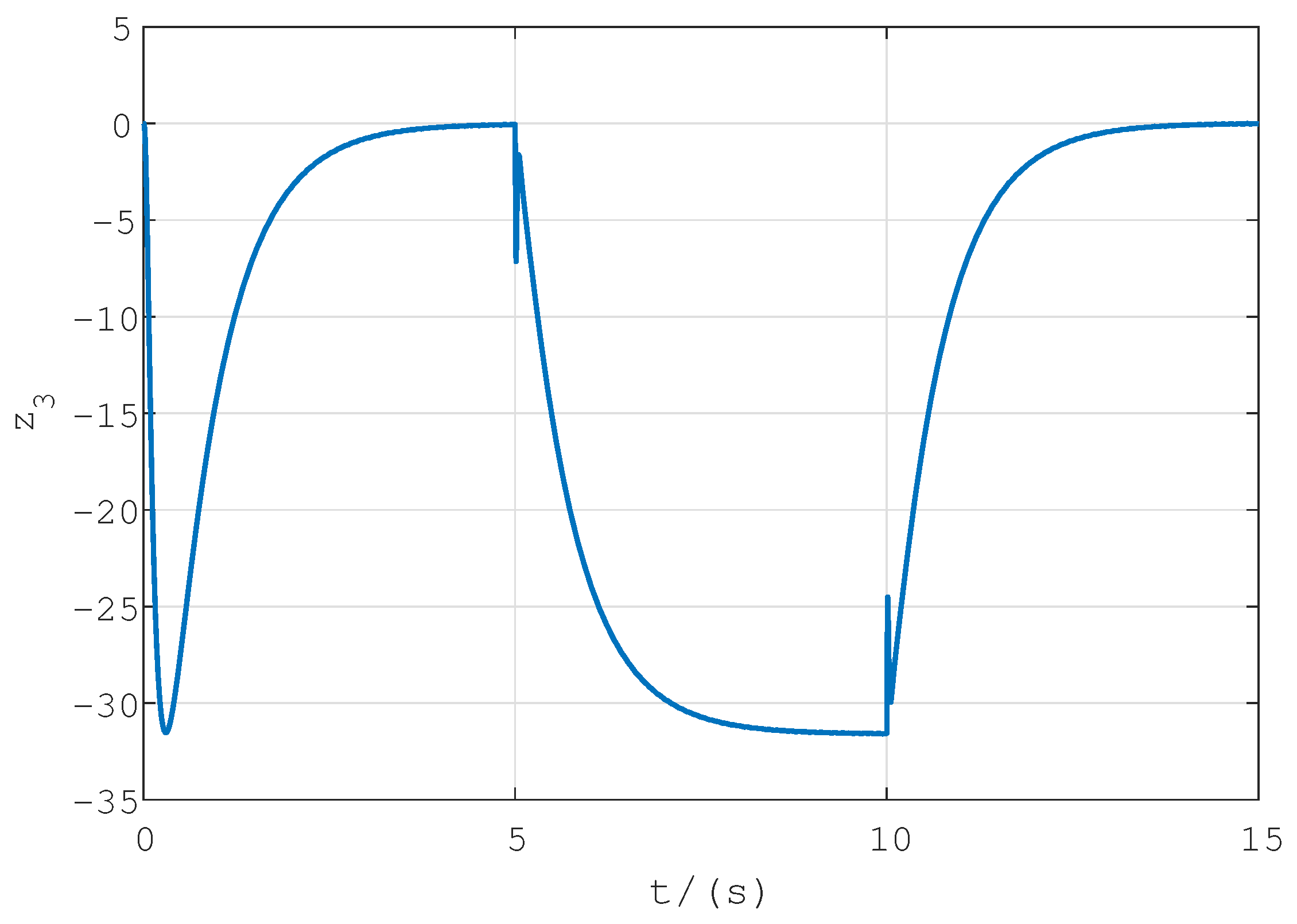
- The suggested control method could be used for the compensation of the total disturbance of the system. The observer can estimate system disturbances without a transducer to stabilize the system trajectory.
- The second-order LADRC attitude autopilot was designed, and the command tracking performance of the system was compared under the condition of multi-source disturbance, which proves the robustness and stable tracking ability of the second-order LADRC attitude autopilot.
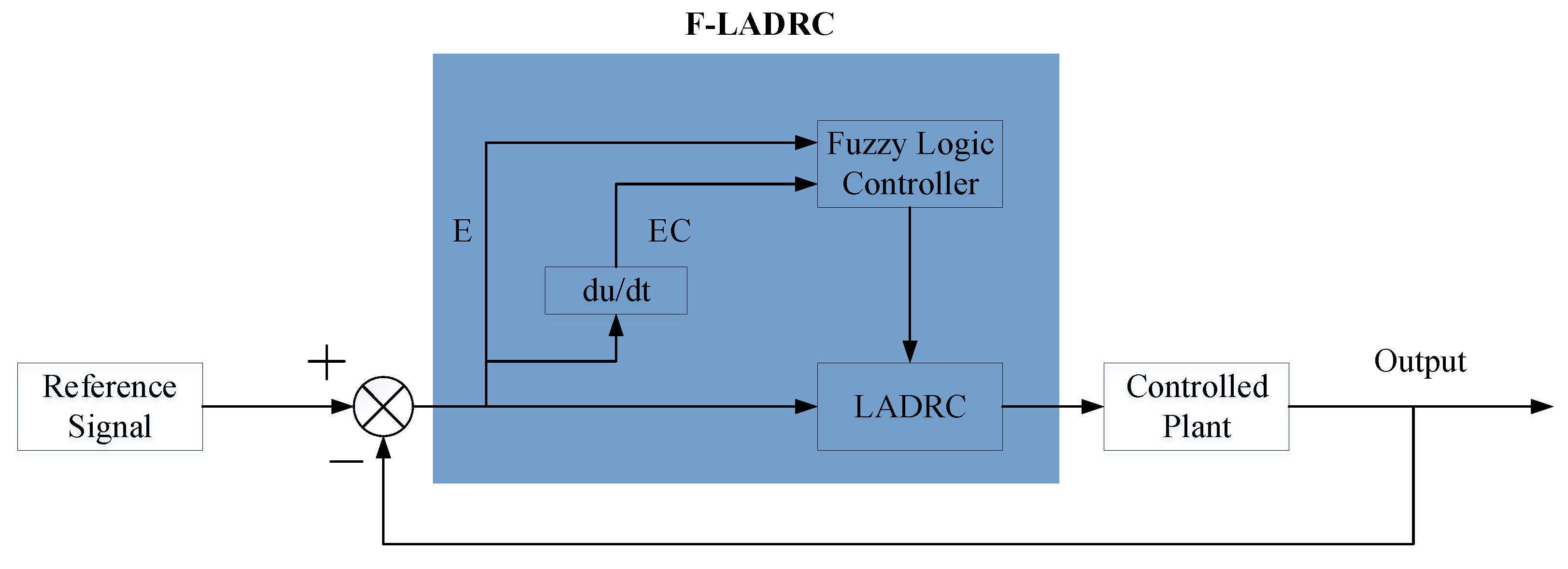
- The fuzzy control theory was applied to the LADRC parameter tuning to realize the parameters’ self-adaptive adjustment and improve the tuning efficiency.
2. Dynamic Model
3. Design and Analysis of Controller
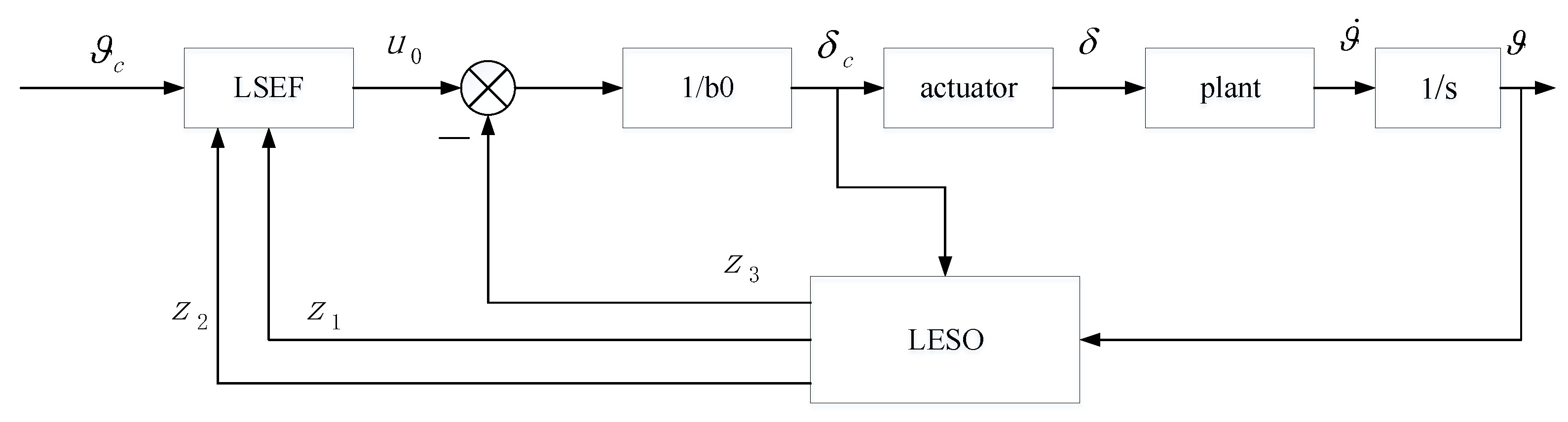
3.1. Controller Design
3.2. Convergence Analysis of LESO
3.3. Anti-Disturbance Analysis of LADRC
4. Simulation Analysis
4.1. Tuning of Parameters Based on Fuzzy Control
- Select the input and output variables of the fuzzy controller. This paper selected pitch angle error E and pitch rate error as the input variables, and the tuning parameter as the output variable.
- Select fuzzy description of input and output variables and membership function. This paper selected triangle membership function and set the fuzzy description as follows: NB is negative big; NS is negative small; ZO is zero; PS is positive small; PB is positive big.
- Select fuzzy rules. The fuzzy rules are based on the technical knowledge and practical experience of engineers. This paper selected fuzzy rules as shown in Table 1.
- Fuzzy inference. Under the control of the above fuzzy rules, the nonlinear mapping relationship between input and output can be obtained. The fuzzy inference is completed by the fuzzy control toolbox in Matlab software. The inference type chosen in this paper was Mamdani.
- Defuzzification of the fuzzy controller output. After the fuzzy inference is completed, the output is still a fuzzy variable, and we obtain a fixed value. Simulating with the Matlab software, the defuzzification is completed through the fuzzy control toolbox, and the defuzzification method is centroid.
4.2. Simulation Results
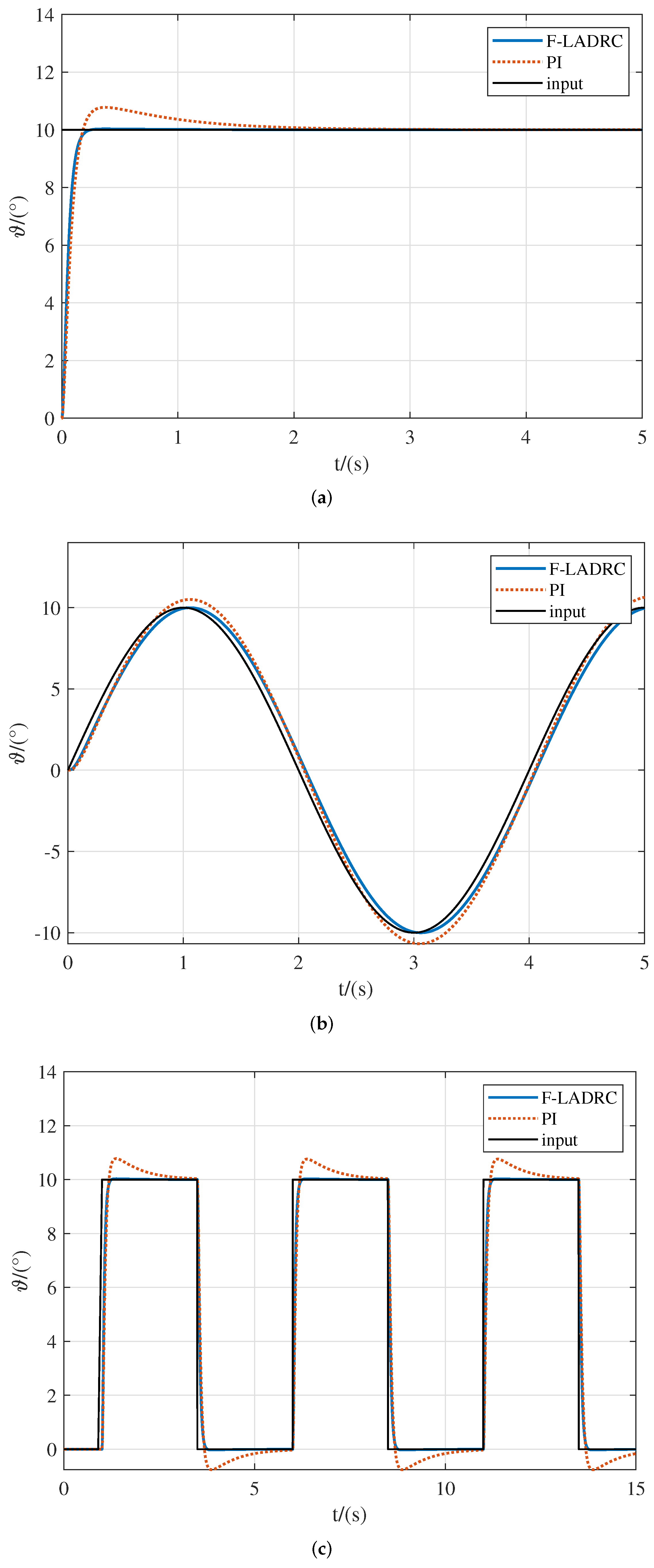
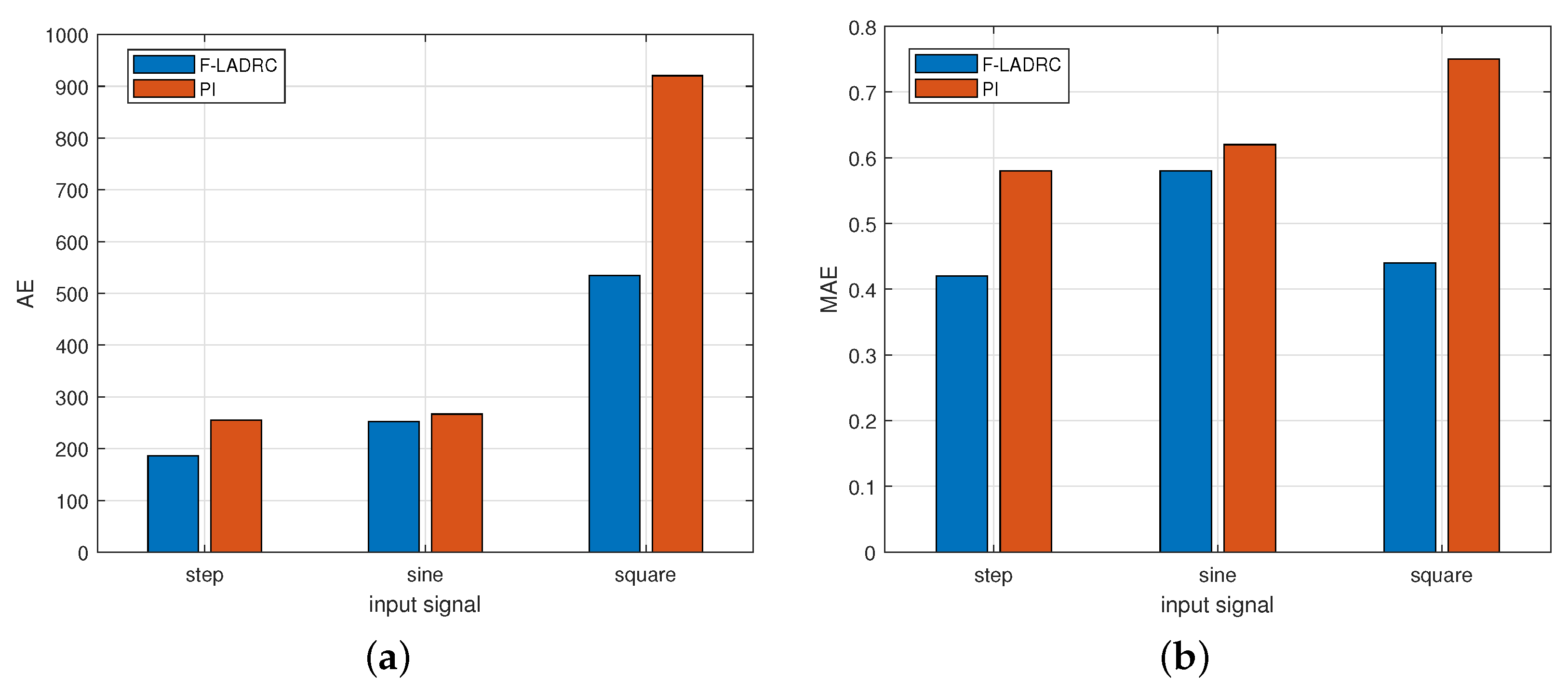
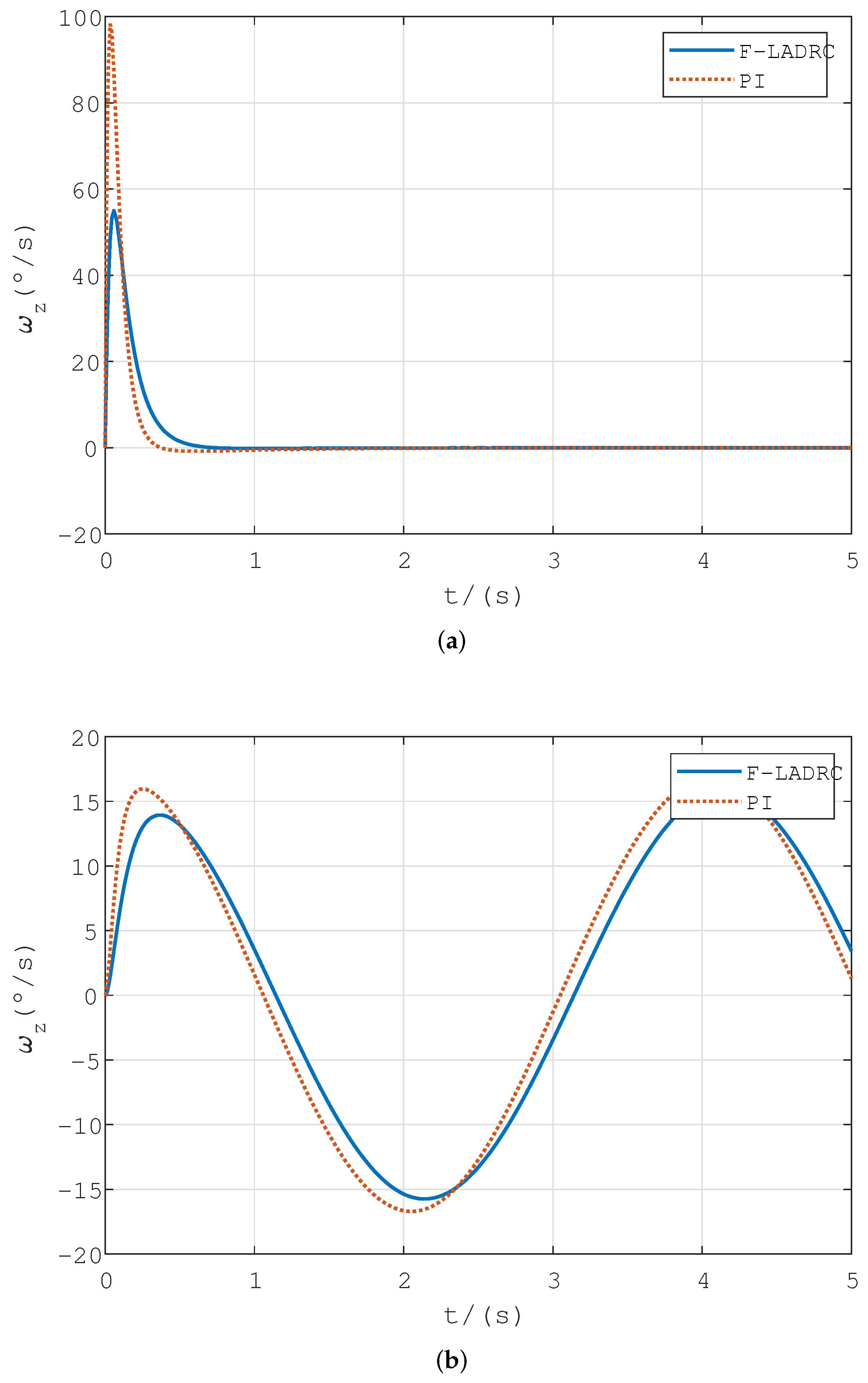
4.2.1. Command Tracking Simulation
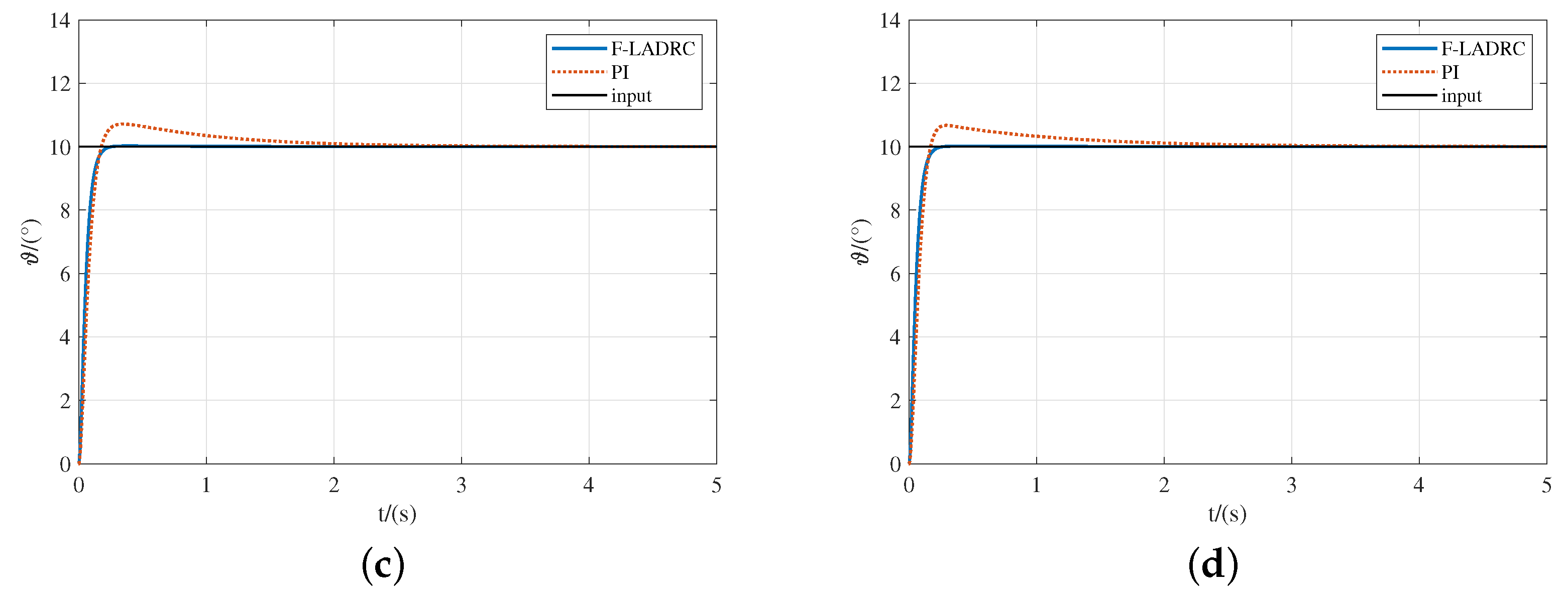
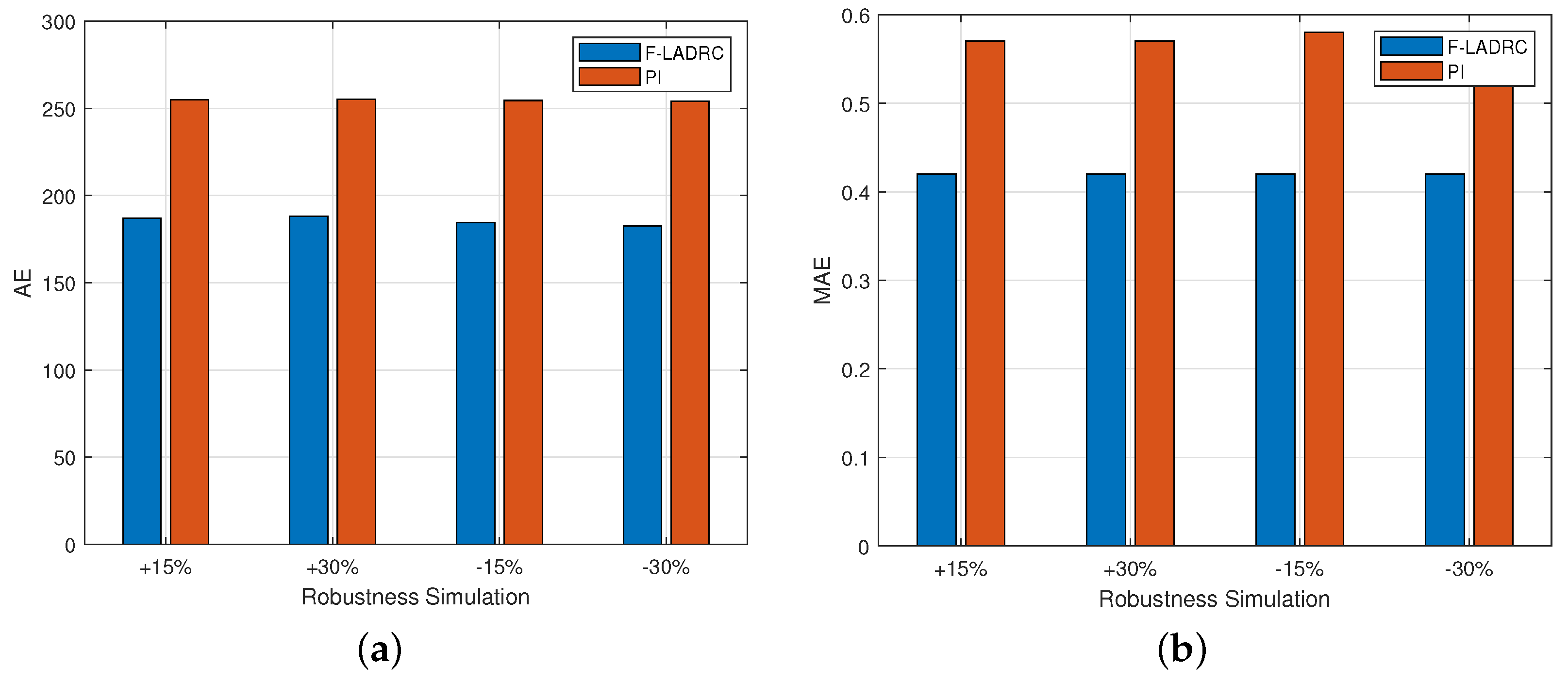
4.2.2. Robustness Simulation
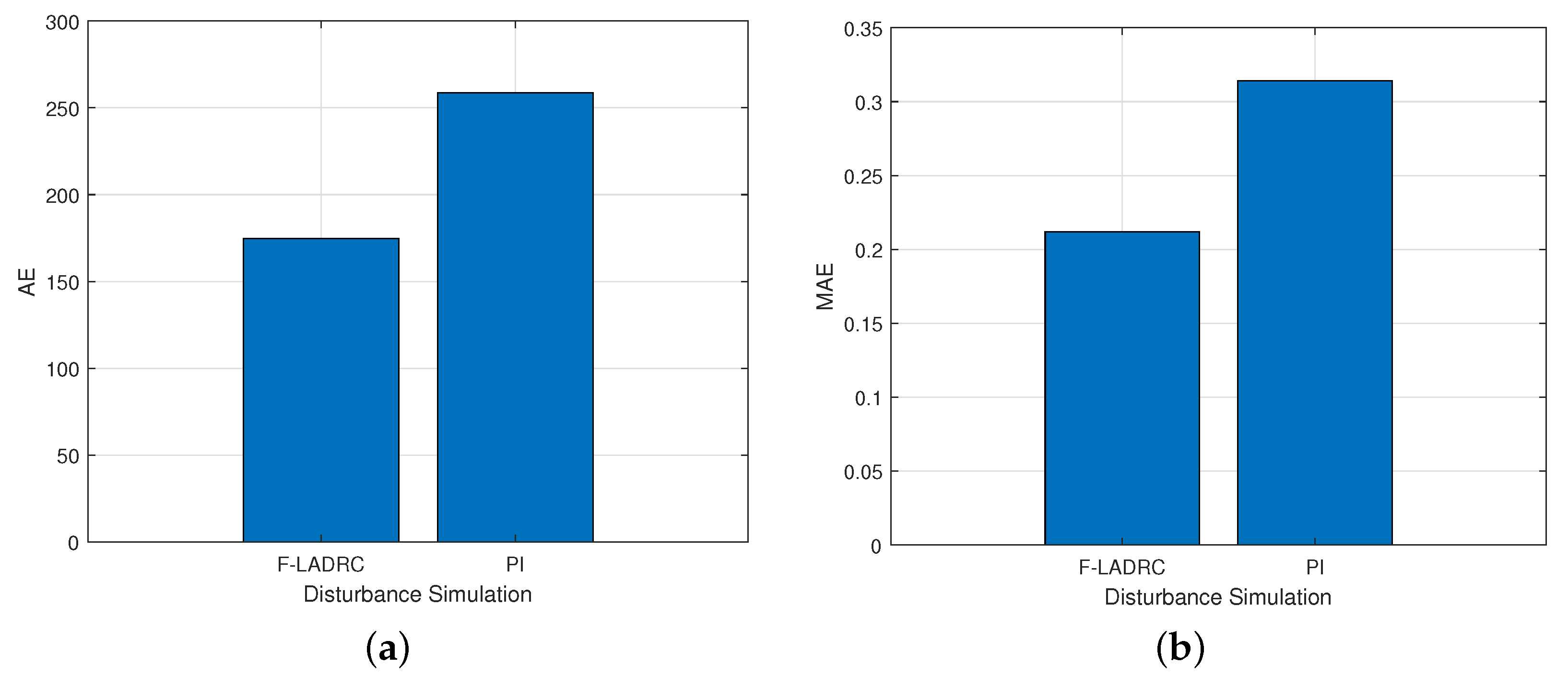
4.2.3. Disturbance Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Holloway, J.C.; Krstic, M. A predictor observer for seeker delay in the missile homing loop. IFAC-PapersOnLine 2015, 48, 416–421. [Google Scholar] [CrossRef]
- McCourt, M.; Klotz, J.; Mehta, S.S.; Curtis, J.W. Disturbance rejection using micro-jet actuators with a MPC policy. In Proceedings of the AIAA Guidance, Navigation, and Control of the Conference, Kissimmee, FL, USA, 5–9 January 2015; p. 1308. [Google Scholar]
- Strub, G.; Theodoulis, S.; Gassmann, V.; Dobre, S.; Basset, M. Gain-scheduled autopilot design and validation for an experimental guided projectile prototype. J. Guid. Control Dyn. 2018, 41, 461–475. [Google Scholar] [CrossRef]
- Theodoulis, S.; Proff, M. Robust flight control tuning for highly agile missiles. In Proceedings of the AIAA Scitech of the Conference, Nashville, TN, USA, 11–15, 19–21 January 2021; p. 1568. [Google Scholar]
- Panchal, B.; Subramanian, K.; Talole, S.E. Robust integrated guidance and control design for tactical missiles. In Proceedings of the AIAA Guidance, Navigation, and Control of the Conference, Kissimmee, FL, USA, 8–12 January 2018; p. 1120. [Google Scholar]
- Głębocki, R.; Jacewicz, M. Sensitivity analysis and flight tests results for a vertical cold launch missile system. Aerospace 2020, 7, 168. [Google Scholar] [CrossRef]
- Tang, P.; Dai, Y.H.; Chen, J.F. Nonlinear robust control on yaw motion of a variable-speed unmanned aerial helicopter under multi-Source disturbances. Aerospace 2022, 9, 42. [Google Scholar] [CrossRef]
- Kürkçü, B.; Kasnakoğlu, C. Robust autopilot design based on a disturbance/uncertainty/coupling estimator. IEEE Trans. Control Syst. Technol. 2018, 27, 2622–2629. [Google Scholar] [CrossRef]
- Ouda, A.N. A robust adaptive control approach to missile autopilot design. Int. J. Dyn. Control 2018, 6, 1239–1271. [Google Scholar] [CrossRef]
- Guo, J.G.; Gu, X.Y.; Guo, Z.Y. Asymptotic adaptive tracking control for hypersonic vehicles with guaranteeing multi-performance requirements. Aerosp. Sci. Technol. 2020, 105, 106025. [Google Scholar] [CrossRef]
- Devan, V.; Chandar, T.S. Cascaded LQR control for missile roll autopilot. In Proceedings of the International CET Conference on Control, Communication, and Computing (IC4), Trivandrum, India, 5–7 July 2018. [Google Scholar]
- Bużantowicz, W. Tuning of a linear-quadratic stabilization system for an anti-aircraft missile. Aerospace 2021, 8, 48. [Google Scholar] [CrossRef]
- Wang, J.M.; Wu, Y.J.; Dong, X.M. Recursive terminal sliding mode control for hypersonic flight vehicle with sliding mode disturbance observer. Nonlinear Dyn. 2015, 81, 1489–1510. [Google Scholar] [CrossRef]
- Gürsoy-Demir, H.; Önder, E.M. A nonlinear disturbance observer-based adaptive integral sliding mode control for missile guidance system. Int. J. Gen. Syst. 2022, 2022, 6978170. [Google Scholar] [CrossRef]
- Lee, J.; Lee, Y.; Kim, Y.; Moon, G.; Jun, B. Design of an adaptive missile autopilot considering the boost phase using the SDRE method and neural networks. J. Frankl. Inst. 2018, 355, 9085–9107. [Google Scholar] [CrossRef]
- Elbatal, A.; Elkhatib, M.M.; Youssef, A.M. Intelligent autopilot design based on adaptive neuro-fuzzy technique and genetic algorithm. In Proceedings of the 12th International Conference on Electrical Engineering (ICEENG), Cairo, Egypt, 7–9 April 2020. [Google Scholar]
- Liu, S.X.; Huang, F.P.; Yan, B.B.; Zhang, T.; Liu, R.F.; Liu, W. Optimal design of multimissile formation based on an adaptive SA-PSO algorithm. Aerospace 2021, 9, 21. [Google Scholar] [CrossRef]
- Doukhi, O.; Lee, D.J. Neural network-based robust adaptive certainty equivalent controller for quadrotor UAV with unknown disturbances. Int. J. Control Autom. Syst. 2019, 17, 2365–2374. [Google Scholar] [CrossRef]
- Singh, P.; Giri, D.K.; Ghosh, A.K. Robust backstepping sliding mode aircraft attitude and altitude control based on adaptive neural network using symmetric BLF. Aerosp. Sci. Technol. 2022, 126, 107653. [Google Scholar] [CrossRef]
- Tran, V.P.; Mabrok, M.A.; Garratt, M.A.; Petersen, I.R. Hybrid adaptive negative imaginary-neural-fuzzy control with model identification for a quadrotor. IFAC J. Syst. Control 2021, 16, 100156. [Google Scholar] [CrossRef]
- Kocer, B.B.; Hady, M.A.; Kandath, H.; Pratama, M.; Kovac, M. Deep neuromorphic controller with dynamic topology for aerial robots. In Proceedings of the Conference on Robotics and Automation, Xi’an, China, 31 May–4 June 2021. [Google Scholar]
- Dupeyroux, J.; Hagenaars, J.J.; Paredes-Vallés, F.; De Croon, G. Neuromorphic control for optic-flow-based landing of MAVs using the Loihi processor. In Proceedings of the Conference on Robotics and Automation, Xi’an, China, 31 May–4 June 2021. [Google Scholar]
- Stroobants, S.; Dupeyroux, J.; De Croon, G. Neuromorphic computing for attitude estimation onboard quadrotors. Neuromorphic Comput. Eng. 2022. [Google Scholar] [CrossRef]
- Liu, X.D.; Huang, W.W.; Yu, C.M. Dynamic surface attitude control for hypersonic vehicle containing extended state observer. J. Astron. 2015, 36, 916–922. [Google Scholar]
- Pu, Z.Q.; Yuan, R.Y.; Tan, X.M.; Yi, J.Q. Active robust control of uncertainty and flexibility suppression for air-breathing hypersonic vehicles. Aerosp. Sci. Technol. 2015, 42, 429–441. [Google Scholar] [CrossRef]
- An, H.; Liu, J.X.; Wang, C.H.; Wu, L.G. Disturbance observer-based antiwindup control for air-breathing hypersonic vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3038–3049. [Google Scholar] [CrossRef]
- Bayrak, A.; Efe, M. A frequency domain comparison of disturbance observer based control schemes. Proc. Inst. Mech. Eng. I-J. Sys. 2022, 236, 244–256. [Google Scholar] [CrossRef]
- Sini, S.; Ananthan, T. A disturbance observer based control for quadrotor aircraft subject to wind gusts. In Proceedings of the IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Trivandrum, India, 10–12 March, 2022; pp. 491–496. [Google Scholar]
- Ordaz, P.; Ramírez, M.; Rodríguez, L.; Cuvas, C.; Romero, H.; Sandre, O. Parameter identification based on nonlinear observer for mechanical systems. J. Comput. Nonlinear Dyn. 2021, 16, 021004. [Google Scholar] [CrossRef]
- Zhang, R.; Han, J.Q. Auto-disturbances rejection controller constructed by cascade extended state observer. Control Decis. 2000, 15, 122–124. [Google Scholar]
- Gao, Z.Q. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Jin, H.Y.; Song, J.C.; Lan, W.Y.; Gao, Z.Q. On the characteristics of ADRC: A PID interpretation. Sci. China Inf. Sci. 2020, 63, 1–3. [Google Scholar] [CrossRef]
- Zhong, S.; Huang, Y.; Guo, L. A parameter formula connecting PID and ADRC. Sci. China Inf. Sci. 2020, 63, 10–13. [Google Scholar] [CrossRef]
- Han, W.J.; Tan, W. Parameter tuning of linear active disturbance rejection control based on PID parameter tuning. Control Decis. 2021, 36, 1592–1600. [Google Scholar]
- Song, J.; Zhao, M.F.; Gao, K.; Su, J.C. Error analysis of ADRC linear extended state observer for the system with measurement noise. IFAC-PapersOnLine 2020, 53, 1306–1312. [Google Scholar] [CrossRef]
- Cui, W.Q.; Tan, W.; Li, D.H.; Wang, Y.T. Tuning of linear active disturbance rejection controllers based on step response curves. IEEE Access 2020, 8, 180869–180882. [Google Scholar] [CrossRef]
- Lin, D.F.; Wang, H.; Wang, J.; Fan, J.F. Autopilot Design and Guidance Law Analysis for Tactical Missiles, 1st ed.; Beijing Institute of Technology: Beijing, China, 2012; pp. 14–20, 57–58. [Google Scholar]
- Mohamed, E.M.; Yan, L. Design and comparison of two-loop with PI and three-loop autopilot for static unstable missile. Int. J. Electr. Comput. Eng. Syst. 2016, 8, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Bahri, S. Longitudinal flight control laws for high aspect ratio light utility aircraft. J. Phys. Conf. Ser. 2018, 1130, 012026. [Google Scholar] [CrossRef]
- Efremov, A.V.; Mbikayi, Z.; Efremov, E.V. Comparative Study of Different Algorithms for a Flight Control System Design and the Potentiality of Their Integration with a Sidestick. Aerospace 2021, 8, 290. [Google Scholar] [CrossRef]
- Hirokawa, R.; Sato, K.; Manabe, S. Autopilot design for a missile with reaction-jet using coefficient diagram method. J. Syst. Eng. Electron. 2001, 4162, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.B.; Chen, X.H. Standard coefficient design method for multi-loops control system and its application. J. Syst. Eng. Electron. 2004, 12, 1852–1855. [Google Scholar]
- Coelho, J.P.; Pinho, T.M.; Boaventura, C.J. Controller system design using the coefficient diagram method. Arab. J. Sci. Eng. 2016, 41, 3663–3681. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | |||||
|---|---|---|---|---|---|
| NB | NS | ZO | PS | PB | |
| NB | PB | PB | PS | PS | ZO |
| NS | PB | PS | PS | ZO | NS |
| ZO | PS | PS | ZO | NS | NS |
| PS | PS | ZO | NS | NS | NB |
| PB | ZO | NS | NS | NB | NB |
| 250 | 280 | 1.5 | 1.6 | 0.23 |
| Aerodynamic Drift | Adjustment Time/(s) | Overshoot | ||
|---|---|---|---|---|
| PI | F-LADRC | PI | F-LADRC | |
| Increased 15% | 1.33 | 0.48 | 8.40% | 0.04% |
| Increased 30% | 1.29 | 0.58 | 9% | 0.05% |
| Reduced 15% | 1.42 | 0.49 | 7.10% | 0.02% |
| Reduced 30% | 1.48 | 0.51 | 6.70% | 0.02% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, D.; Li, C.; Shi, Z. Attitude Autopilot Design Based on Fuzzy Linear Active Disturbance Rejection Control. Aerospace 2022, 9, 429. https://doi.org/10.3390/aerospace9080429
Han D, Li C, Shi Z. Attitude Autopilot Design Based on Fuzzy Linear Active Disturbance Rejection Control. Aerospace. 2022; 9(8):429. https://doi.org/10.3390/aerospace9080429
Chicago/Turabian StyleHan, Dongmei, Chuanjun Li, and Zhongjiao Shi. 2022. "Attitude Autopilot Design Based on Fuzzy Linear Active Disturbance Rejection Control" Aerospace 9, no. 8: 429. https://doi.org/10.3390/aerospace9080429
APA StyleHan, D., Li, C., & Shi, Z. (2022). Attitude Autopilot Design Based on Fuzzy Linear Active Disturbance Rejection Control. Aerospace, 9(8), 429. https://doi.org/10.3390/aerospace9080429