2.1. Calculation of Natural Frequency of Three-Layer Cylindrical Shell
The structure of the solid rocket engine was abstracted into a three-layer cylindrical shell comprising a shell, a thermal insulation layer and a grain. The displacement in the thickness direction of the three-layer cylindrical shell could be expressed by the displacement of the middle plane, where
, ν and
stood for the radial, axial and tangential directions, respectively. The turning angles were expressed as
and
, respectively. Based on the first-order shear deformation theory (FSDT), the total displacement field was expressed by:
and
represent the outermost, middle and innermost layers, respectively.
,
, and
are the coordinates of the outermost, middle and the innermost layers in the thickness direction, respectively.
is radial thickness. With
, ν, and
for the displacements in the axial direction
, the rotation angle
and the thickness direction, respectively and full contact as the boundary condition, the following equation was obtained:
Under the above boundary condition, the displacement field was expressed as:
According to the boundary conditions in equation (2), the translational displacements
,
and
and the rotation angles
,
and
of the innermost and innermost layers are as follows:
is the ratio of shear stress to elastic modulus.
The total kinetic energy
and strain energy
were written into the matrix of each element:
where,
is the stress,
is the strain,
is the volume,
is the length of cylinder,
is the mass matrix,
is the stiffness matrix.
The following kinematic equation was established using Hamilton’s principle:
where,
W is the work from the external force,
stands for the total kinetic energy, and
is the total strain energy (
).
and
were always constant [
30]. After substituting all energy equations and element stiffness and mass matrices into the above equation, the following kinematic equation was acquired:
where,
is the equivalent nodal force of the system,
is the stiffness matrix of the system, and [
M] is the mass matrix.
Under the static condition, the change in strain energy was equivalent to the internal/external pressure of the cylindrical shell (
) introduced by energy changes based on Hamilton’s principle. After plugging the energy, the following force item was obtained in
introduced by heat:
where,
and
are thermal and external forces,
is the static stiffness matrix of the element, and
is the static deflection. After substituting, the displacement field and stress components were defined as initial stress at each layer. A dynamic response equation was determined based on consideration of these prestress. In free vibration analysis, the constitutive equation was as follows:
where,
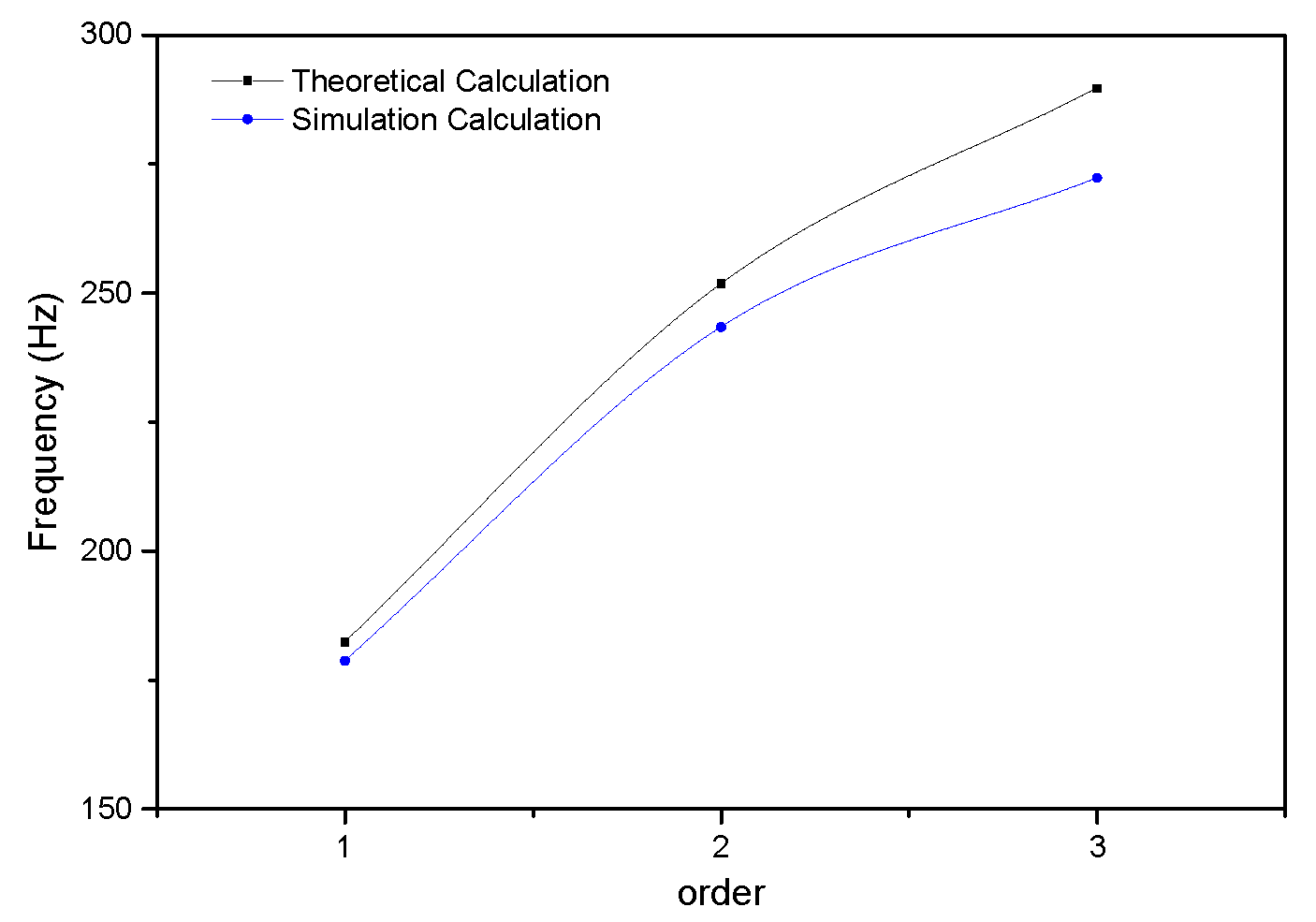
is a complex damping layer stiffness matrix, related to frequency. The eigenvalue problem was not directly solved due to relevant characteristics of frequency. The natural frequency could be calculated by developing the frequency range of the frequency response band of the structure under harmonic loading. Besides, the natural frequency could be solved by calculating stiffness matrix iteration, thus solving the eigenvalue problem in the above equation. During iteration, the natural frequency of the bare cylindrical shell was the best starting point. Iteration was continuously performed until reaching the following convergence:
where,
is the convergence tolerance, which is 10
−5.
The time-varying grain thickness was expressed as below:
where
is the initial thickness,
denotes time, and
stands for the grain combustion thickness per second.
in the formula was substituted by .
Then, the following holds true in Equation (2):
Equation (4) was written into the following form:
Equation (6) was expressed as follows:
2.2. Experiment of Natural Frequency of Three-Layer Cylindrical Shell
In the modal experiment, a specimen was generally supported by two ways: free suspension and maintaining the original boundary conditions of the specimen. The free suspension generally refers to suspending the entire system with elastic ropes or installing the entire system on a foam pad, requiring that the resonance frequency of the support itself is much lower than the first-order resonance frequency of the specimen. The latter method is generally used in studies on structural resonance frequencies and vibration isolation technologies.
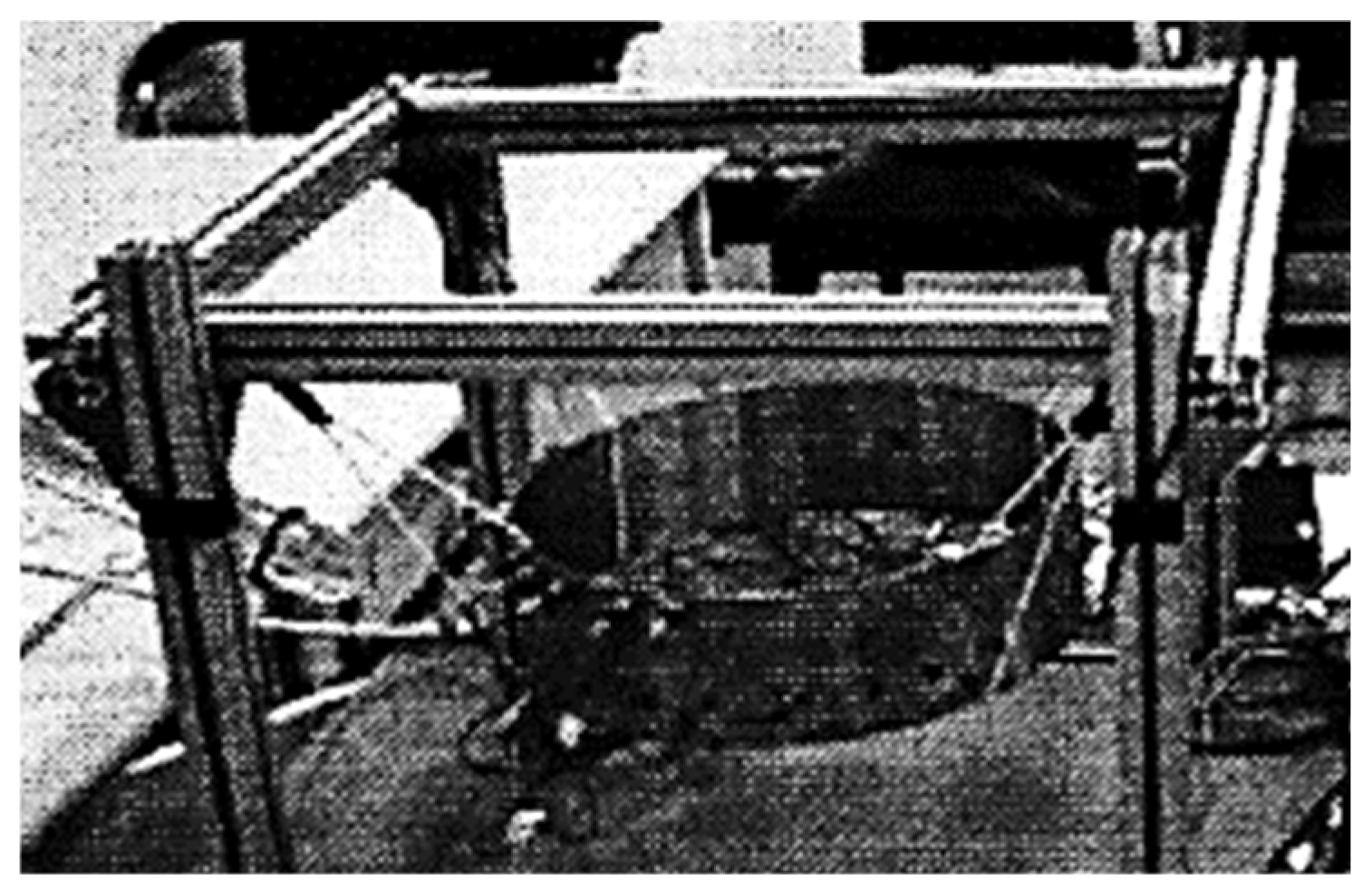
As shown in
Figure 1, the three-layer cylindrical shell specimen was suspended using flexible ropes, better approximating the free state. At this time, the system had six stiffness modes, namely three translational modes and three rotational modes. In the experiment, the hammer impulse method was employed for vibration excitation, with one-point excitation and multi-point response measurement for testing.
A viscoelastic three-layer cylindrical shell was adopted as the calculation and experimental model, consisting of the outermost shell (steel), the middle layer (rubber) and the innermost layer (galvanized sheet), with size parameters as follows:
= 80 mm; = 2 mm, = 2 mm, = 0.5 mm, = 143 mm
Among them, was the length of the cylindrical shell, , , and stood for the thickness of the outermost shell, the middle layer and the innermost layer, respectively, and was the radius of the middle surface of the outermost layer.
2.3. The Cylindrical Cavity Fluid-Solid Coupling Experimental Platform
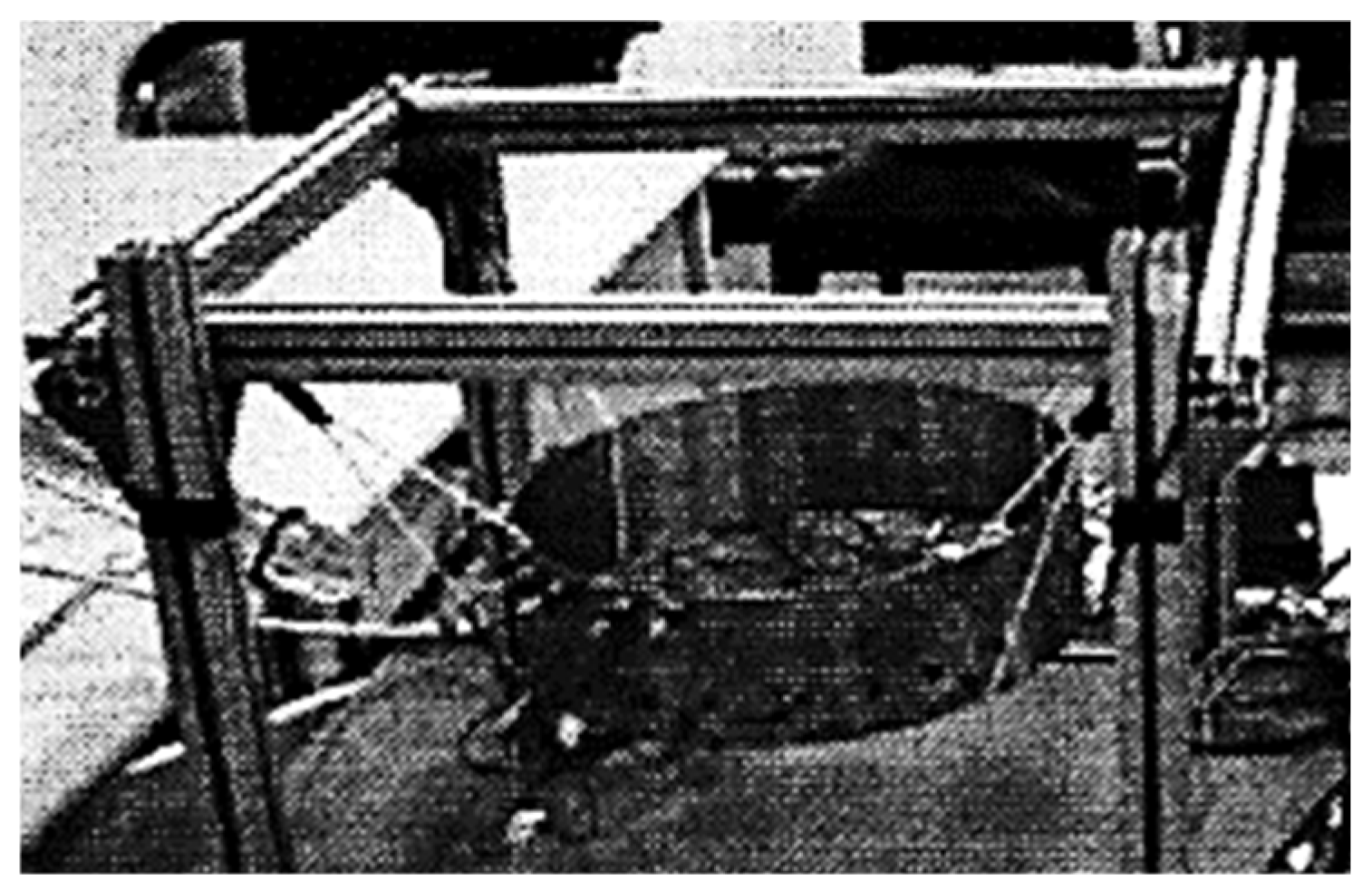
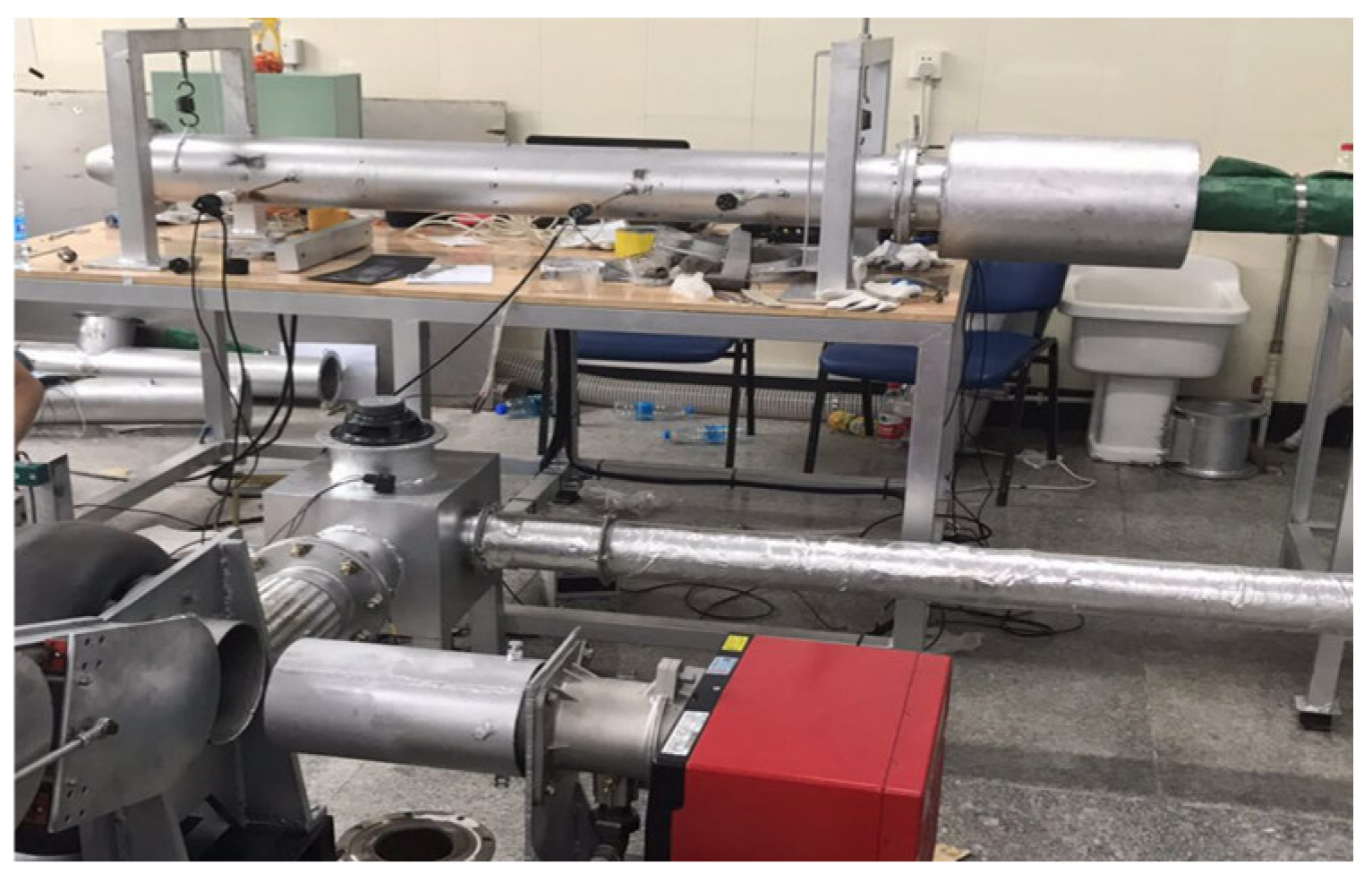
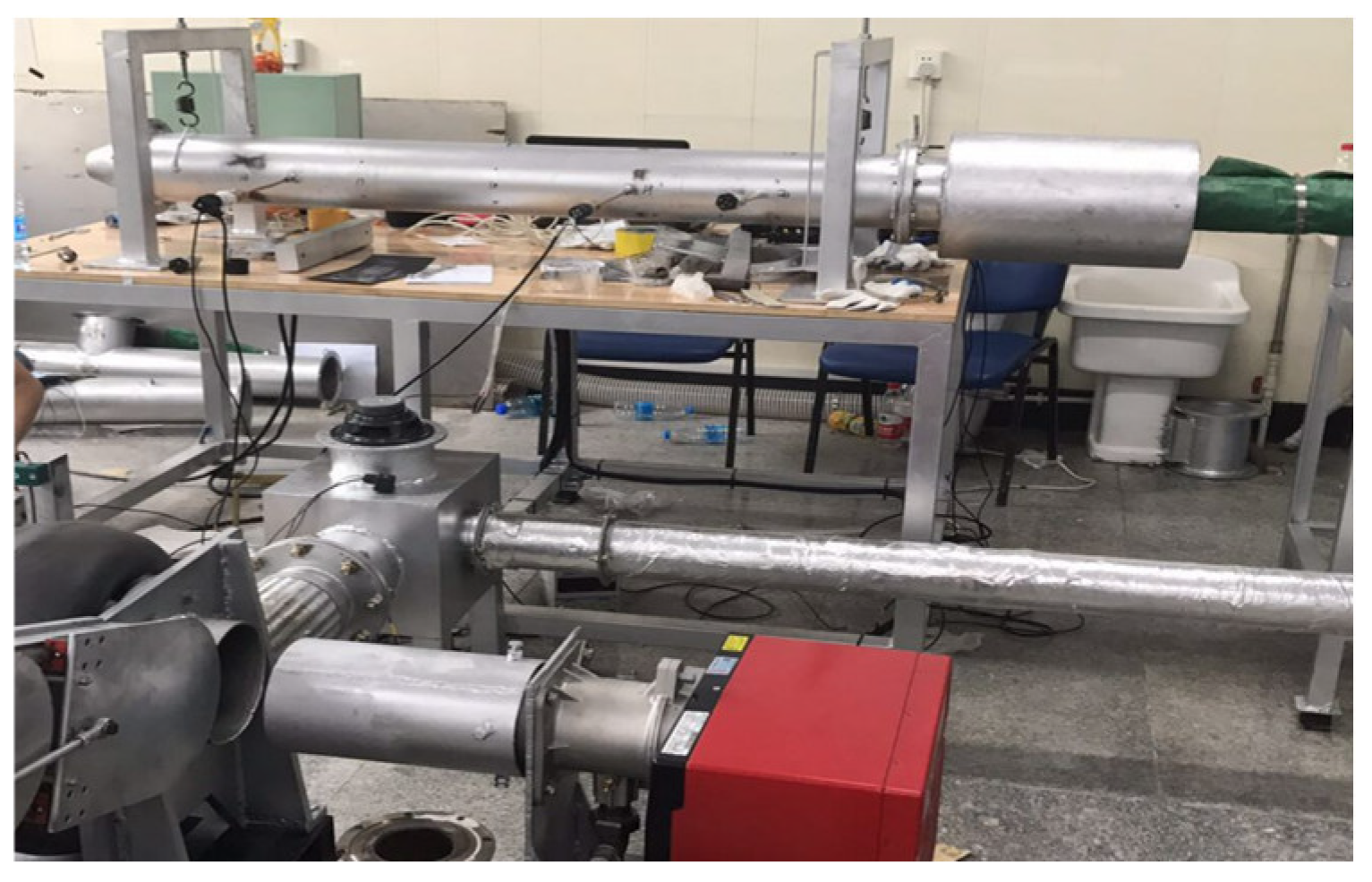
The cylindrical cavity fluid-solid coupling experimental platform is shown in
Figure 2, where rectifying device was set at the right end of the cylindrical cavity and the air outlet caliber was adjustable to ensure the air-in at one end and air-out at the other. Mount points were set on the flanges at the two ends of the cavity, which is shown in
Figure 3 could be mounted by springs with different stiffness or steel hoops onto the experimental benches to realize different constraints.
Different acoustic excitation signals were provided by high power loudspeakers and acoustic power amplifiers. The model of acoustic pressure sensors and acceleration sensors arranged at different positions in the cavity was CYB41 and 2258A-10. The power amplifiers is shown in
Figure 4. The dynamic signal acquisition card with model of Donghua DH8302 which is shown in
Figure 5 communicated with computers through computer network cards to reach real-time data transmission, showing high test accuracy and strong anti-interference ability and guaranteeing the accurate and reliable test results.
Experiments under different conditions could be carried out on the experimental platform built: (1) pulsed excitation (force hammer), white noise excitation, acoustic excitation with constant frequency, acoustic swept frequency excitation, and cold flow and hot flow excitations could be selected. Specifically, the sensors under hot flow excitation should be replaced with high temperature sensors. (2) the models could be changed in thickness, length and shape. (3) soft spring constraint, hard spring constraint, and clamped constraint at different positions were available. (4) time domain information of various physical quantity could be obtained by collecting signals such as wind speed, pressure, acceleration, and strain. In addition, frequency domain measurement technology based on the discrete Fourier transform method offered by software could be applied to acquire the real-time frequency domain information for the corresponding signals.
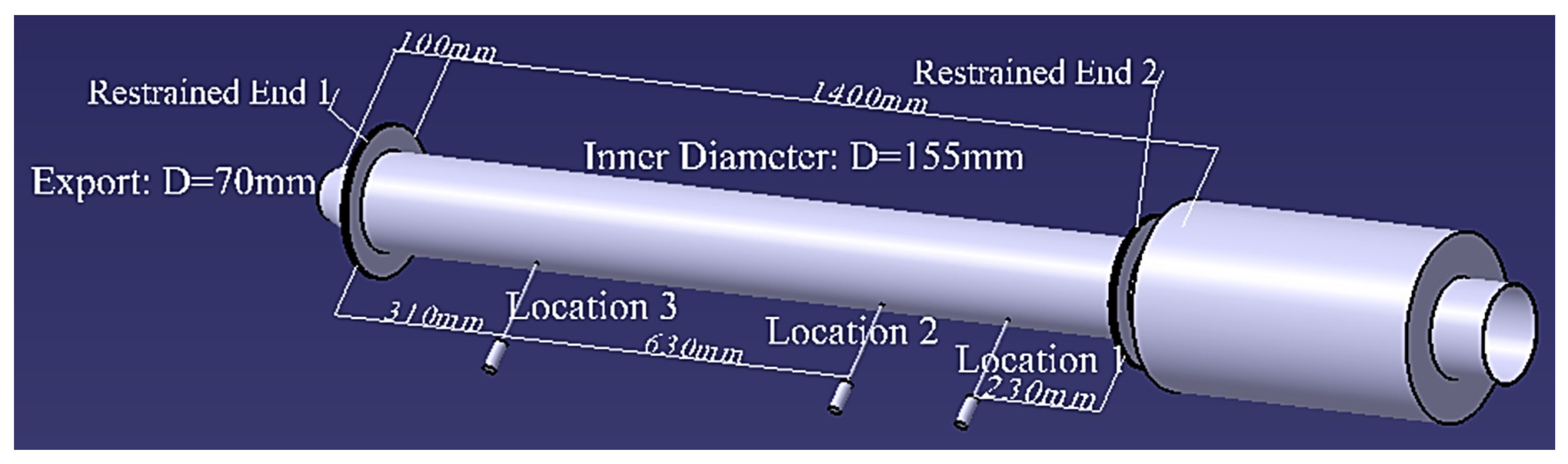
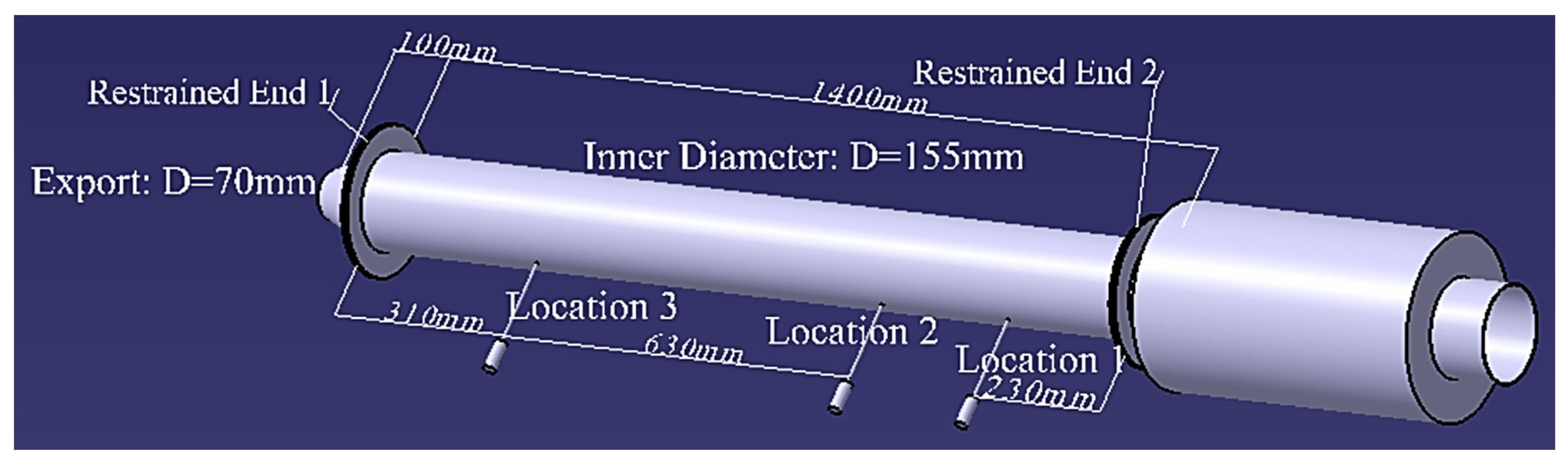
The cylindrical shell is shown as
Figure 2, and its dimension, and position of sensor and constraint are presented in
Figure 6. To be specific, clamped or spring constraint could be carried out at the restrained ends 1 and 2, the pressure sensor or microphone could be installed at position 1, 2, and 3, the microphone or anemograph could be set at position 4 and the acceleration sensor could be arranged between the two restrained ends.
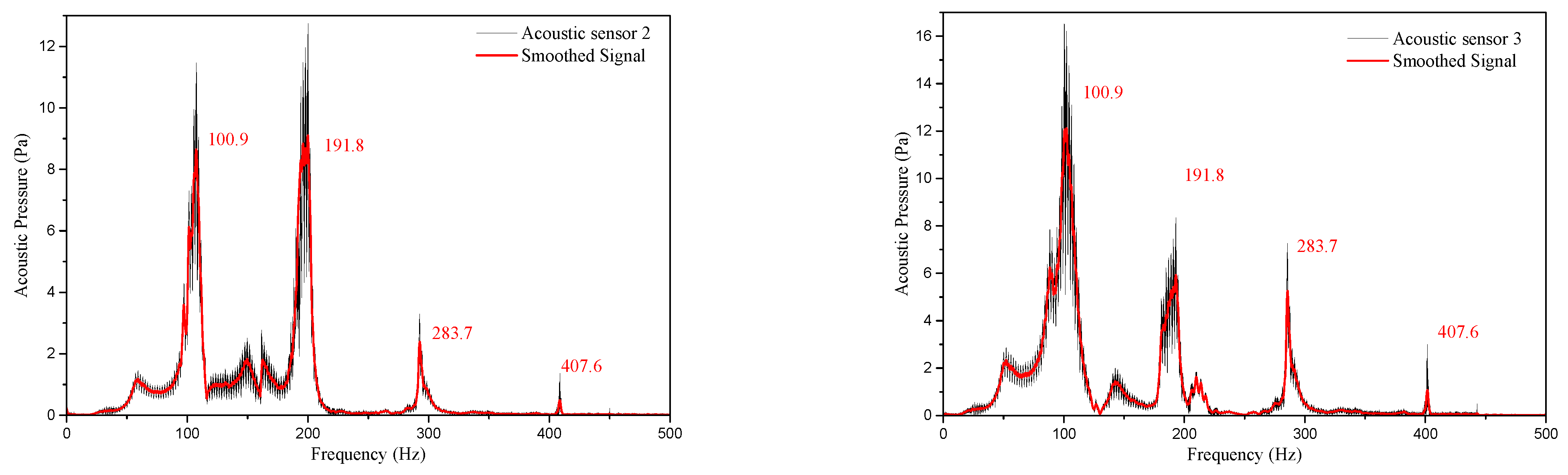
In accordance with the experimental devices and conditions, the implementable random excitation signal was adopted to measure the acoustic mode of the acoustic cavity. An open-source toolkit could be applied to gain the white noise signal. The signal was firstly amplified by the power amplifiers, and was transformed into acoustic pressure signals through high power loudspeakers. The acoustic waves entered the cylindrical-like acoustic cavity through the hard pipelines, soft pipelines and rectifying devices successively and were measured by pressure sensors or microphones at different positions.
2.4. Model of the Natural Frequency of the Shell in Case of Time-Varying Grain Thickness under the Working Condition of the Solid Rocket Engine
The rocket engine parameters in related literatures [
31] were referenced for the model. The rocket engine was made of three-layer materials, i.e., shell, heat insulating layer and propellant grain from the outside to the inside. The material parameters are listed in the following
Table 1 and the model structure is shown in
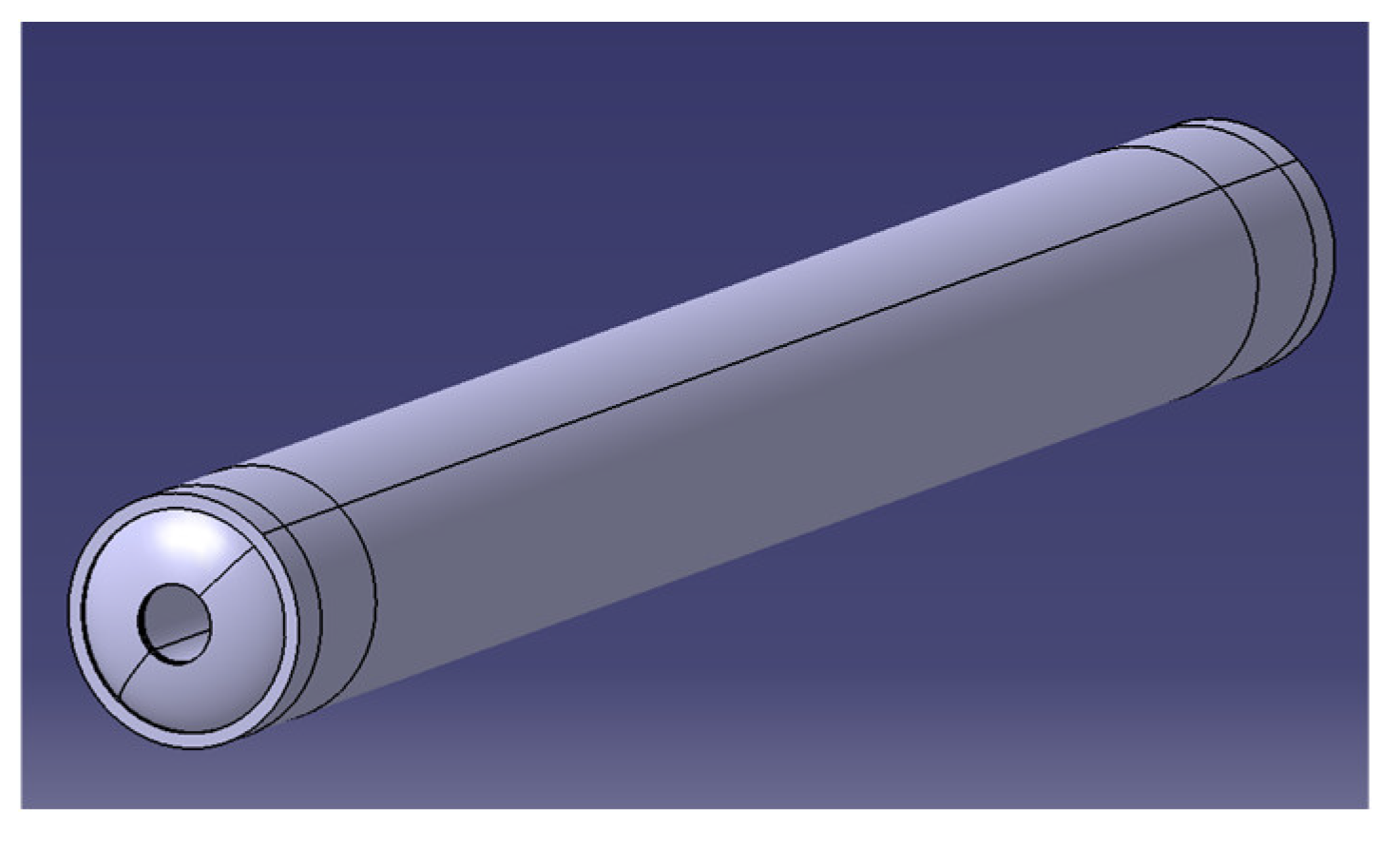
Figure 1. In theoretical calculation, the model was abstracted into a three-layer cylindrical shell. Structure of the solid rocket engine model is shown in
Figure 7.
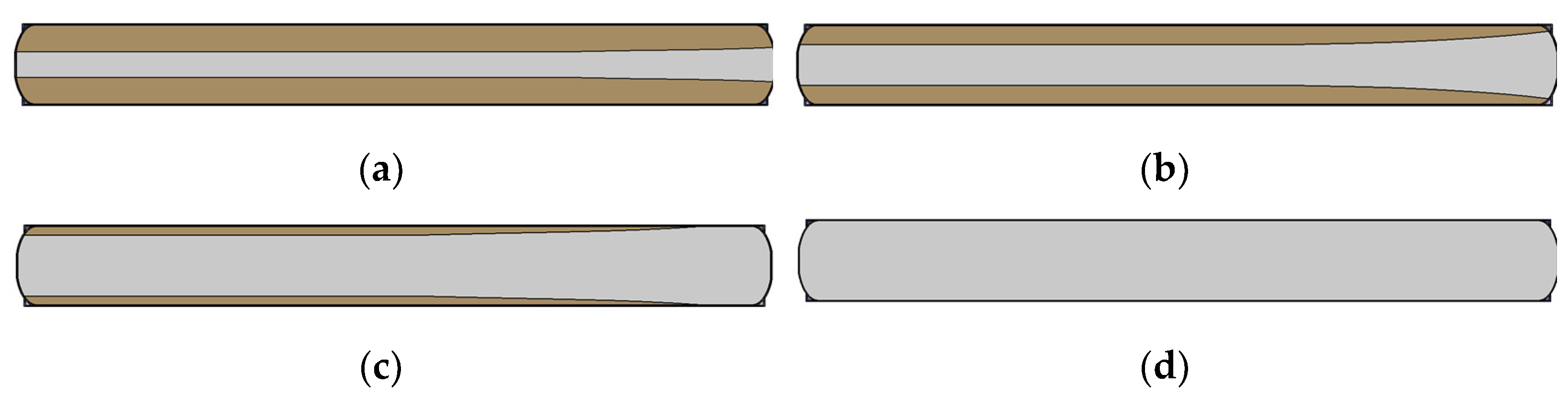
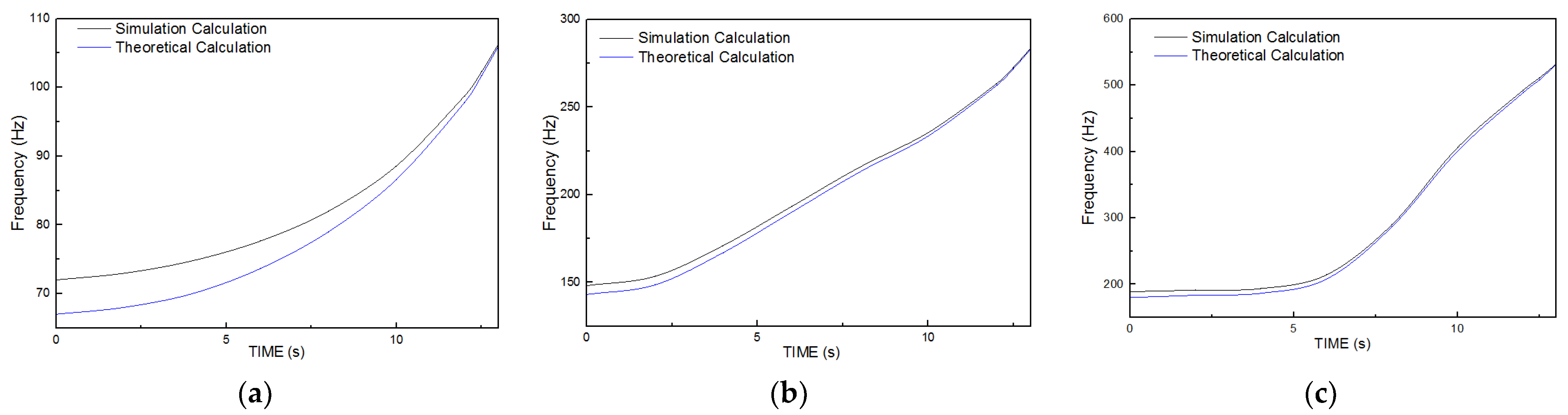
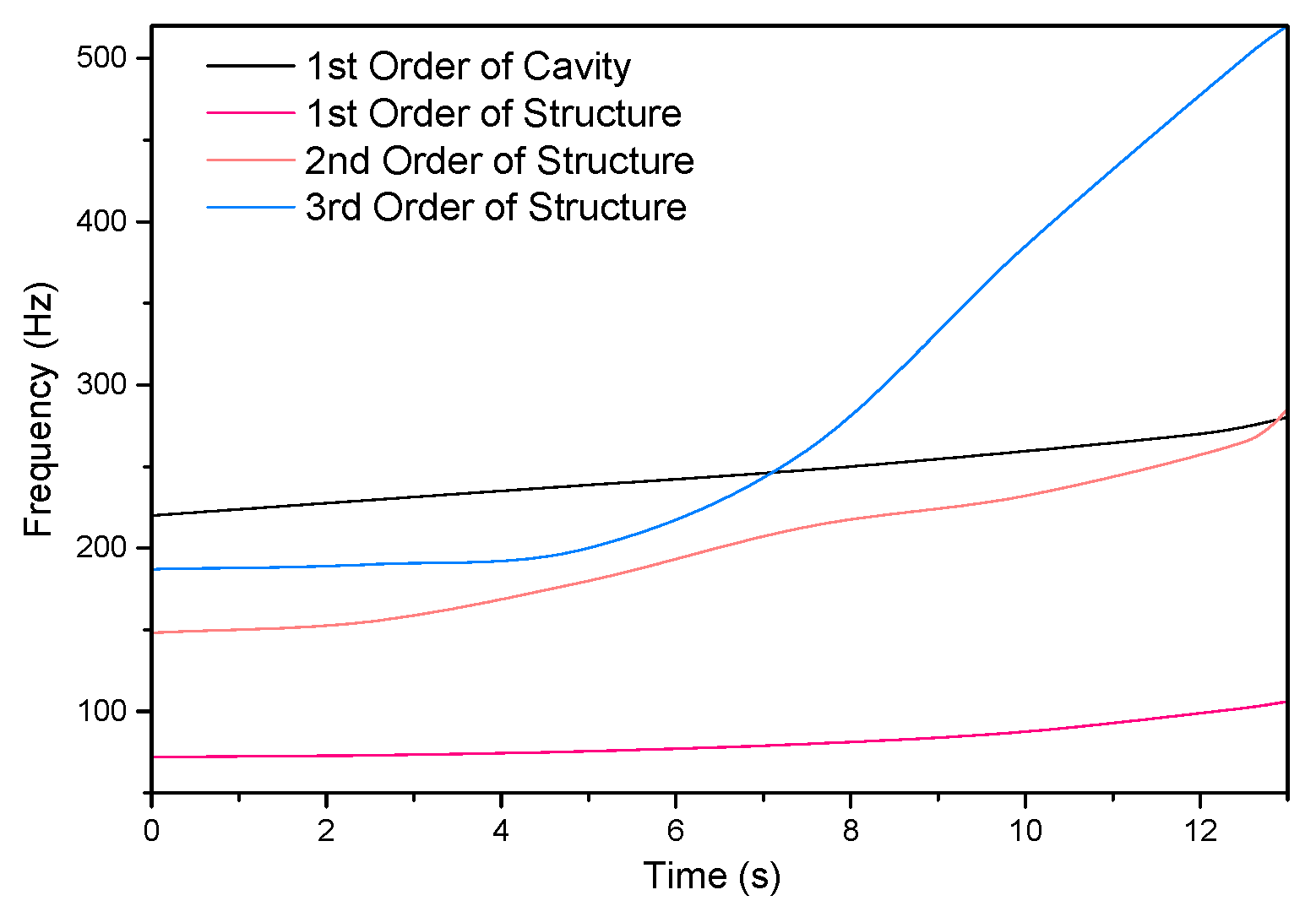
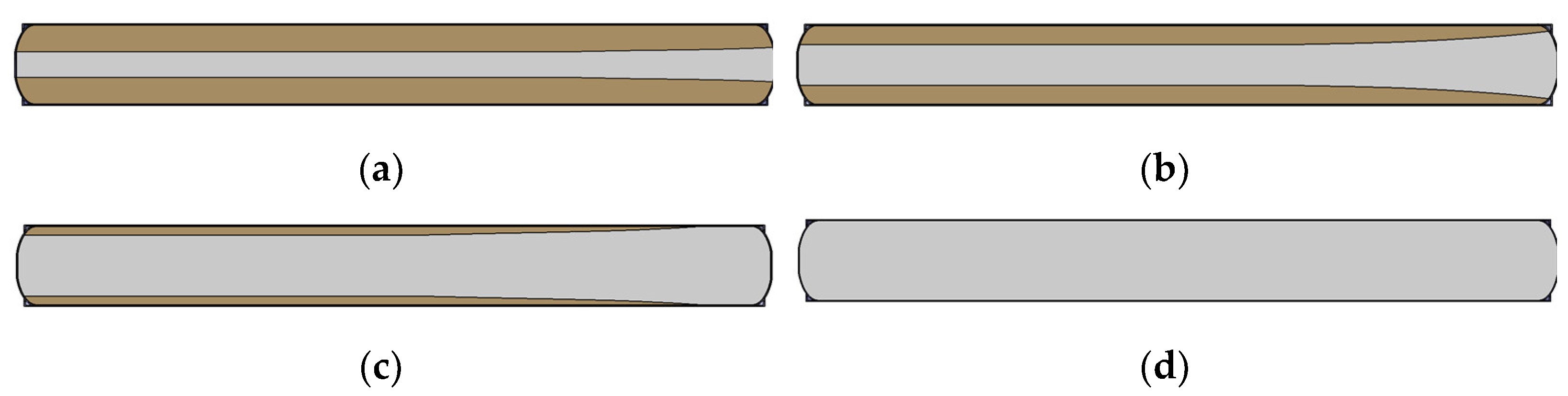
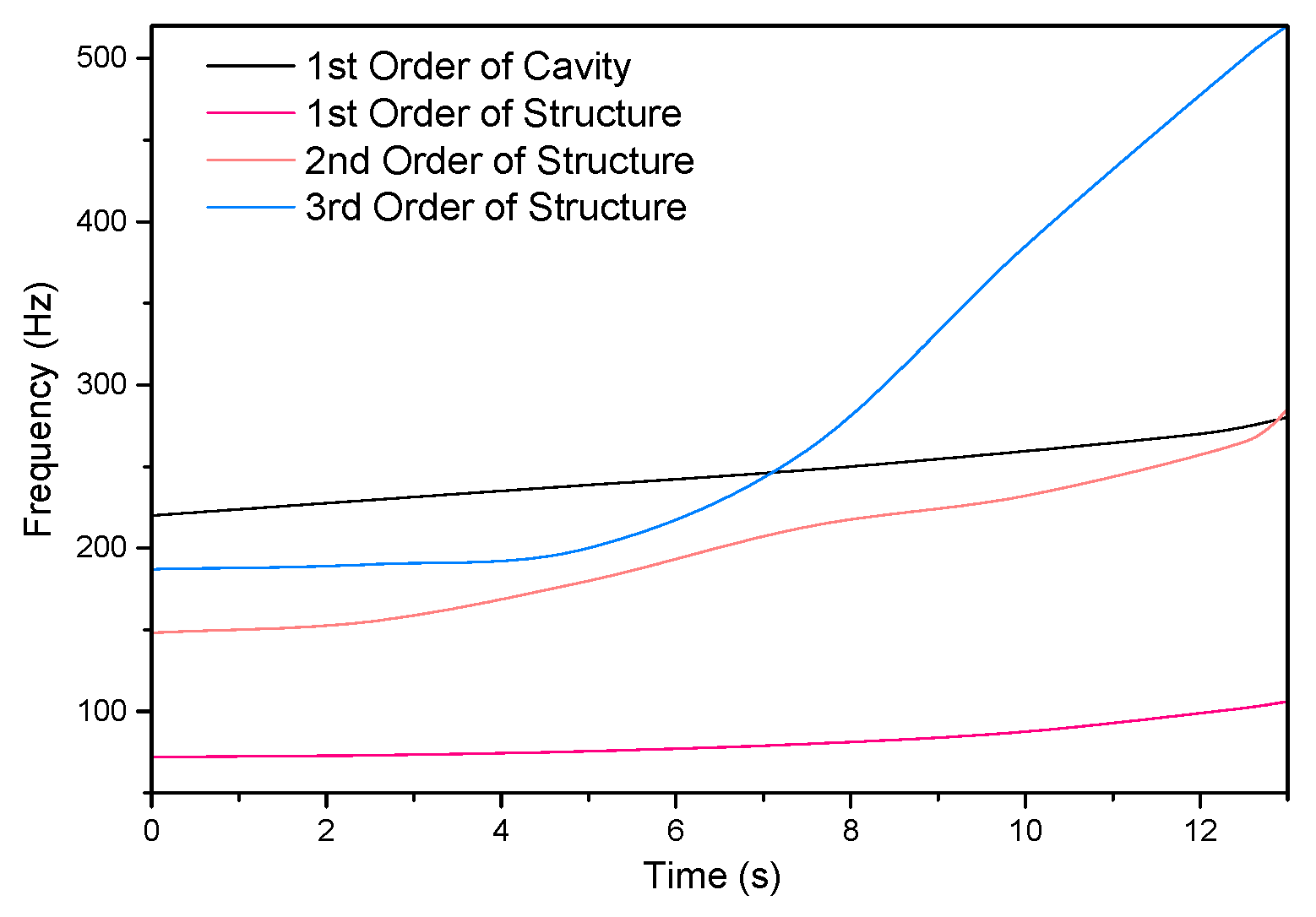
As for the combustion parameters of the propellant grain, the combustion velocity was
= 5 mm/s, and the propellant grain was burned out after the engine working for 13 s. The changes of engine internal structure during grain combustion are shown in
Figure 8. The model was divided into hexahedral elements with a size of 10 mm. Element numbers of each model are as follows: 2s-103700, 6s-87350, 10s-63680 and 13s-54800.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}