
Design of a Multi-Constraint Formation Controller Based on Improved MPC and Consensus for Quadrotors


Abstract
:1. Introduction
2. Problem Description
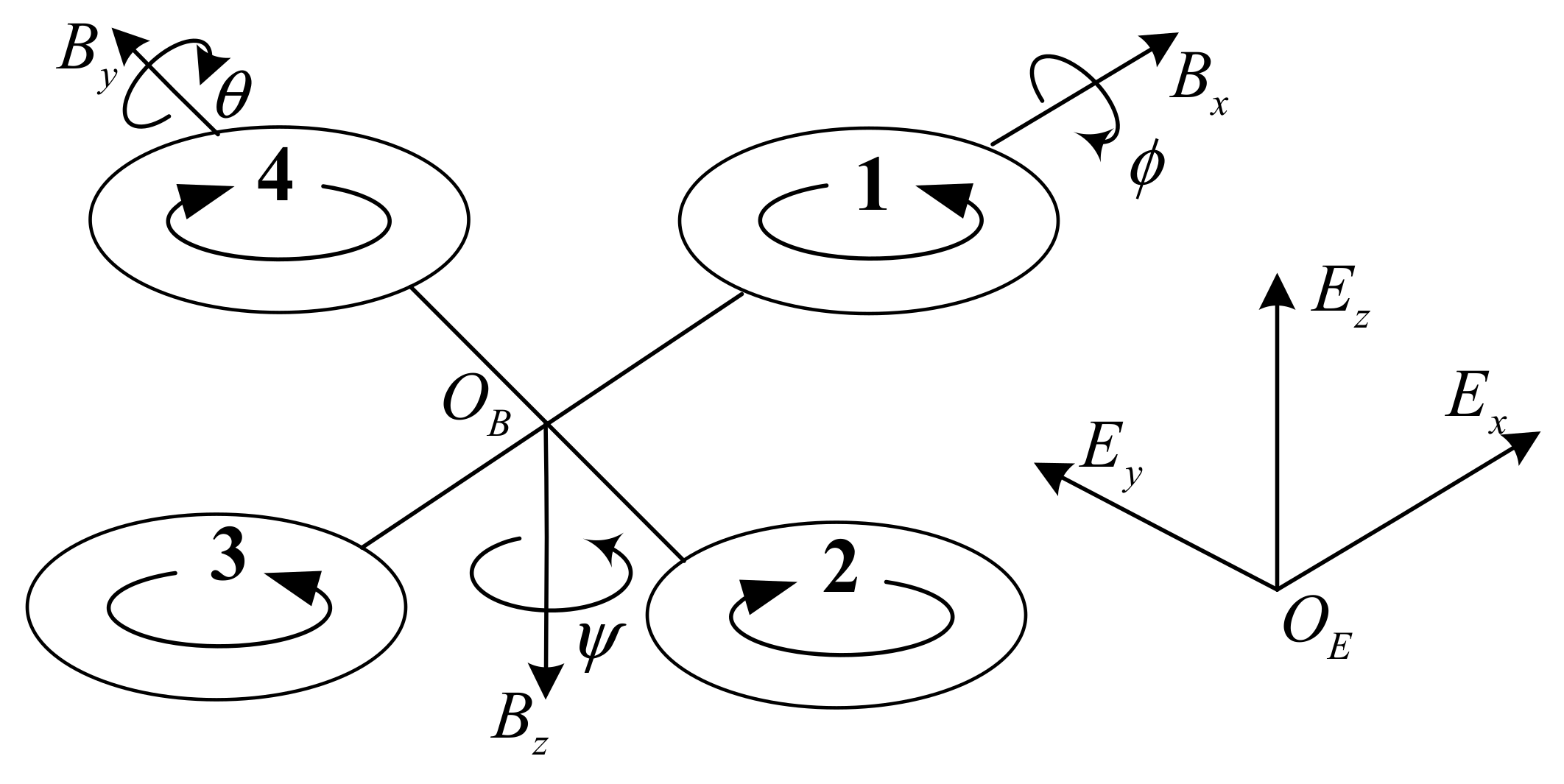
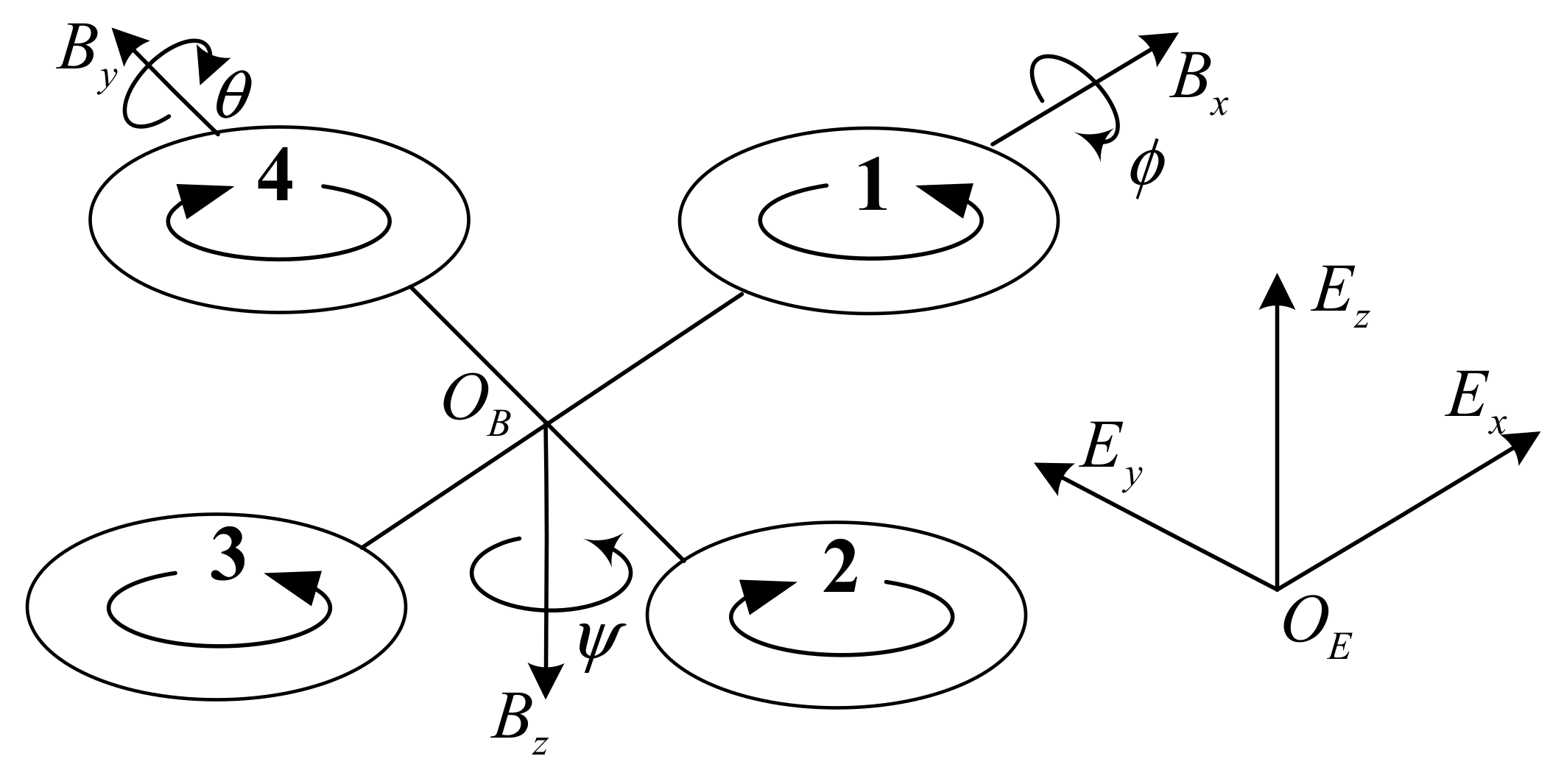
2.1. Dynamic Model of the Quadrotor
2.2. Linear Discrete-Time Model of UAV
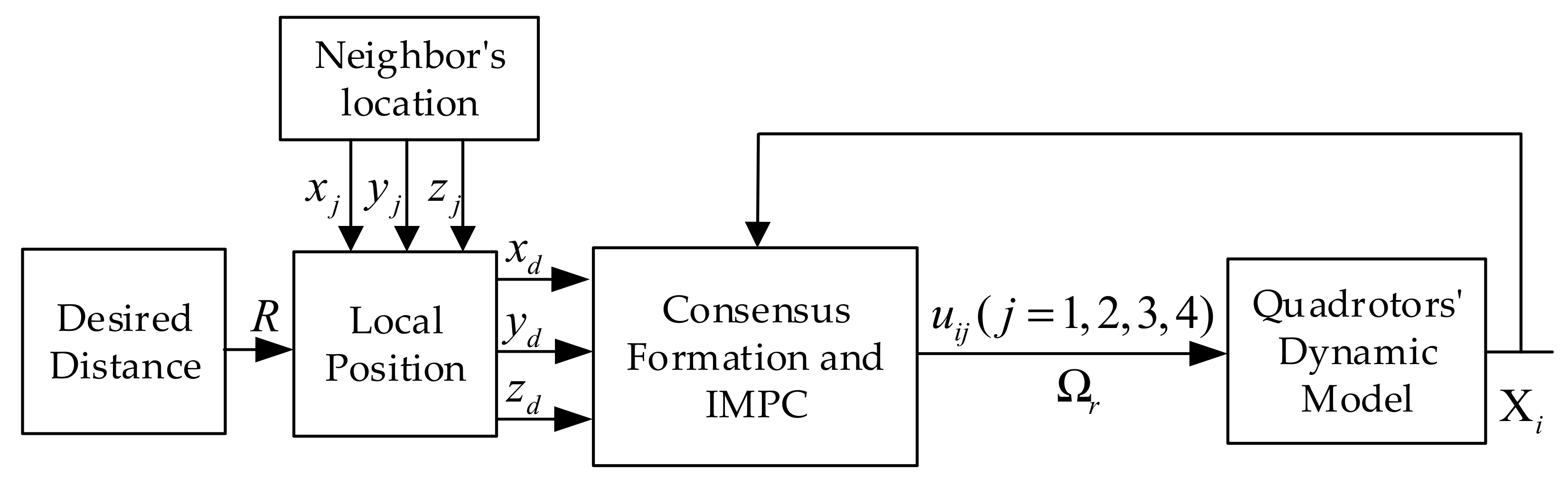
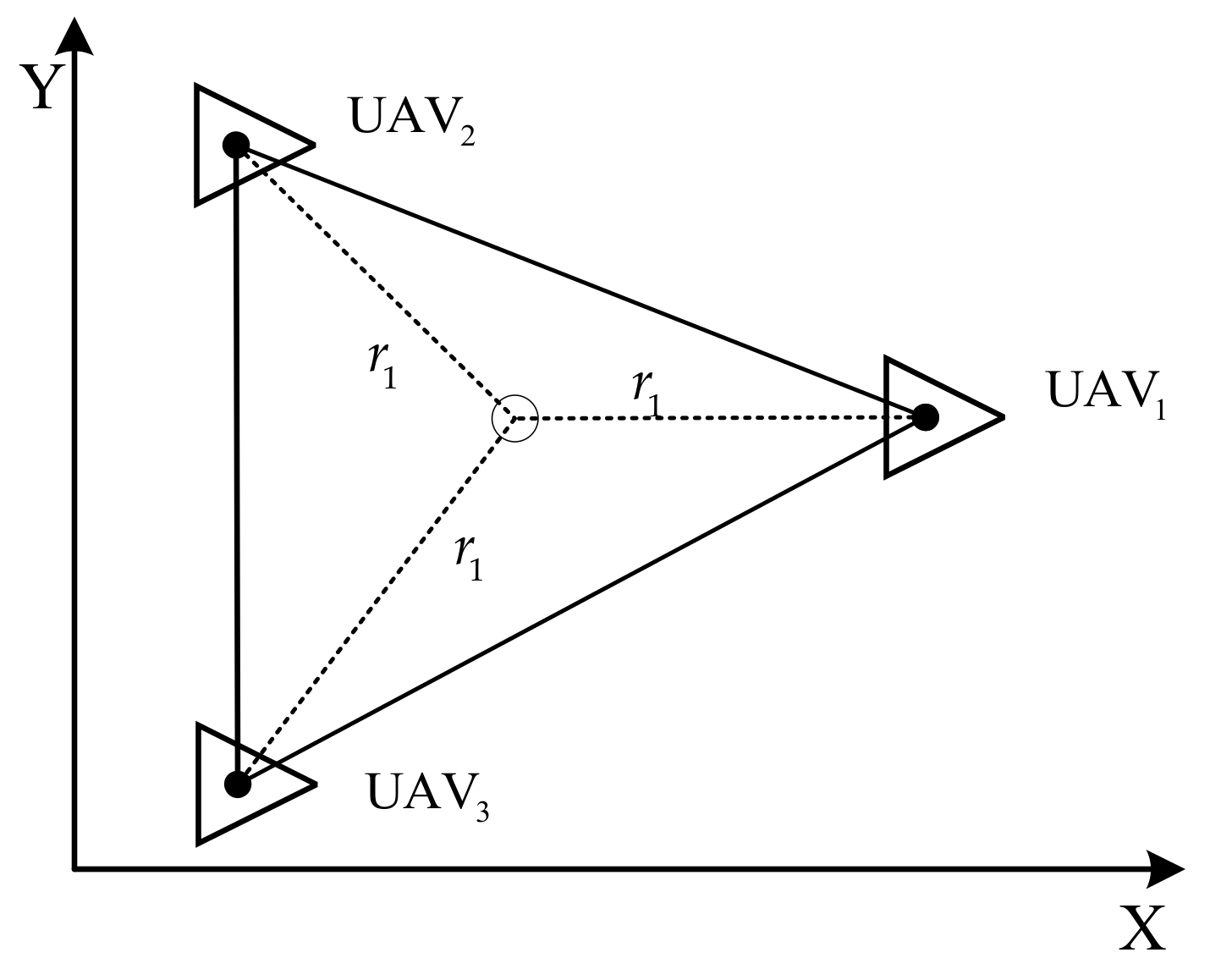
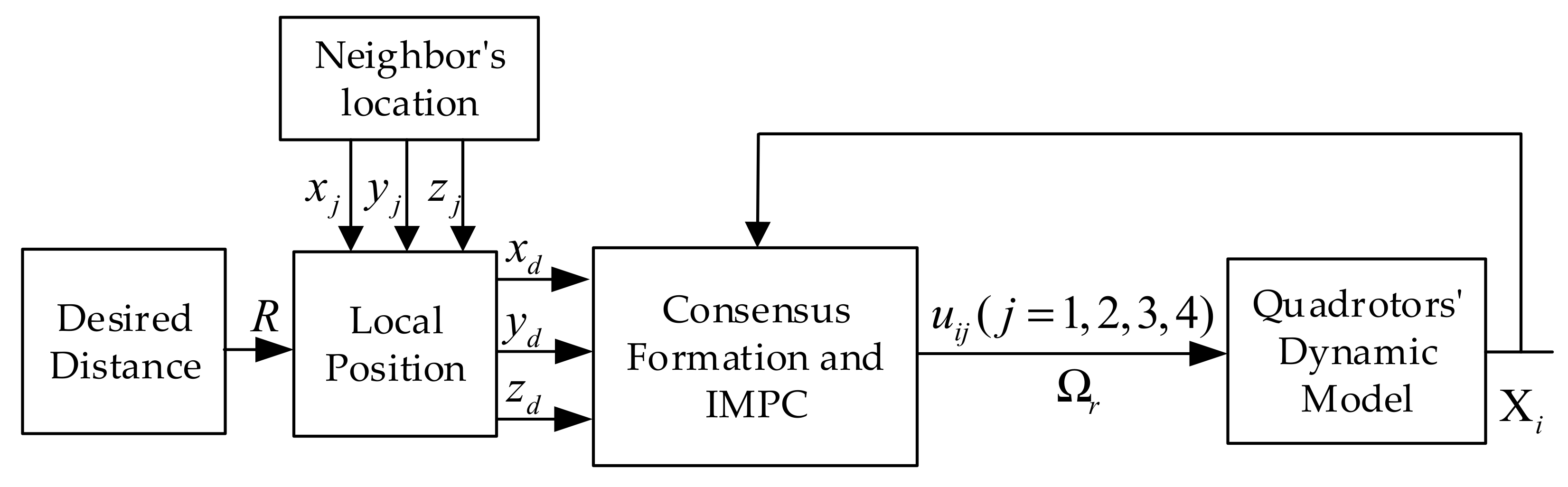
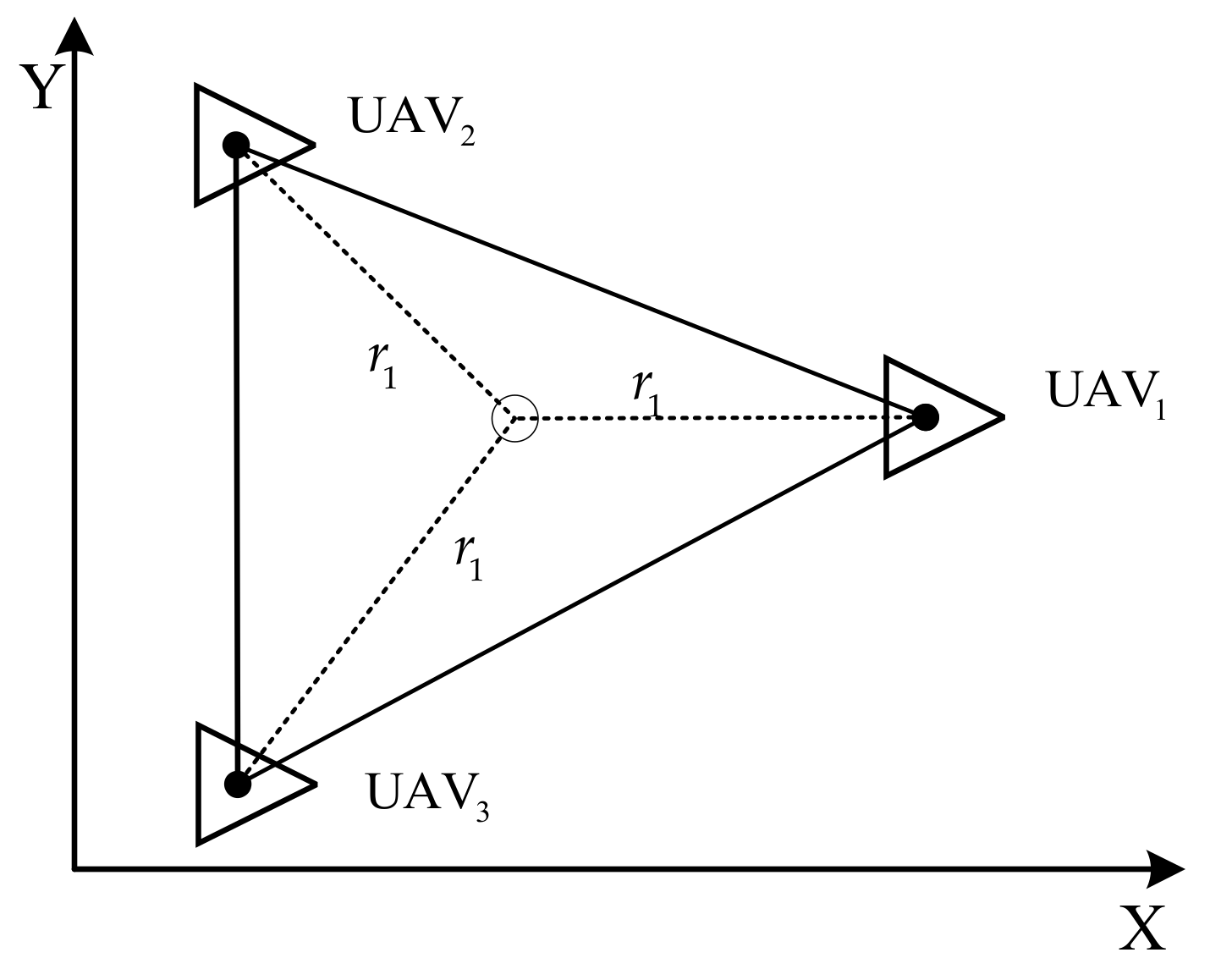
2.3. Formation Algorithm Based on Consensus
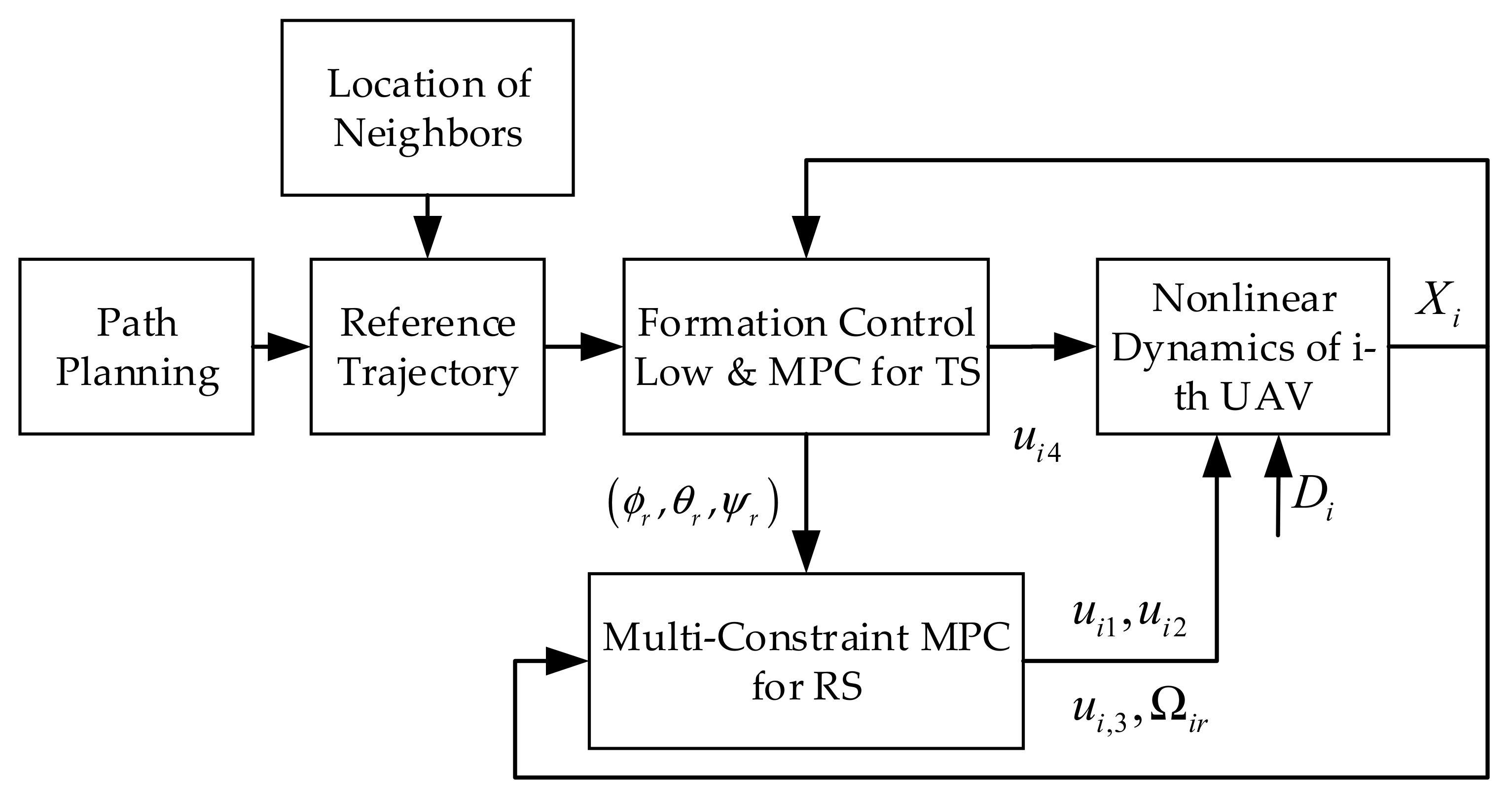
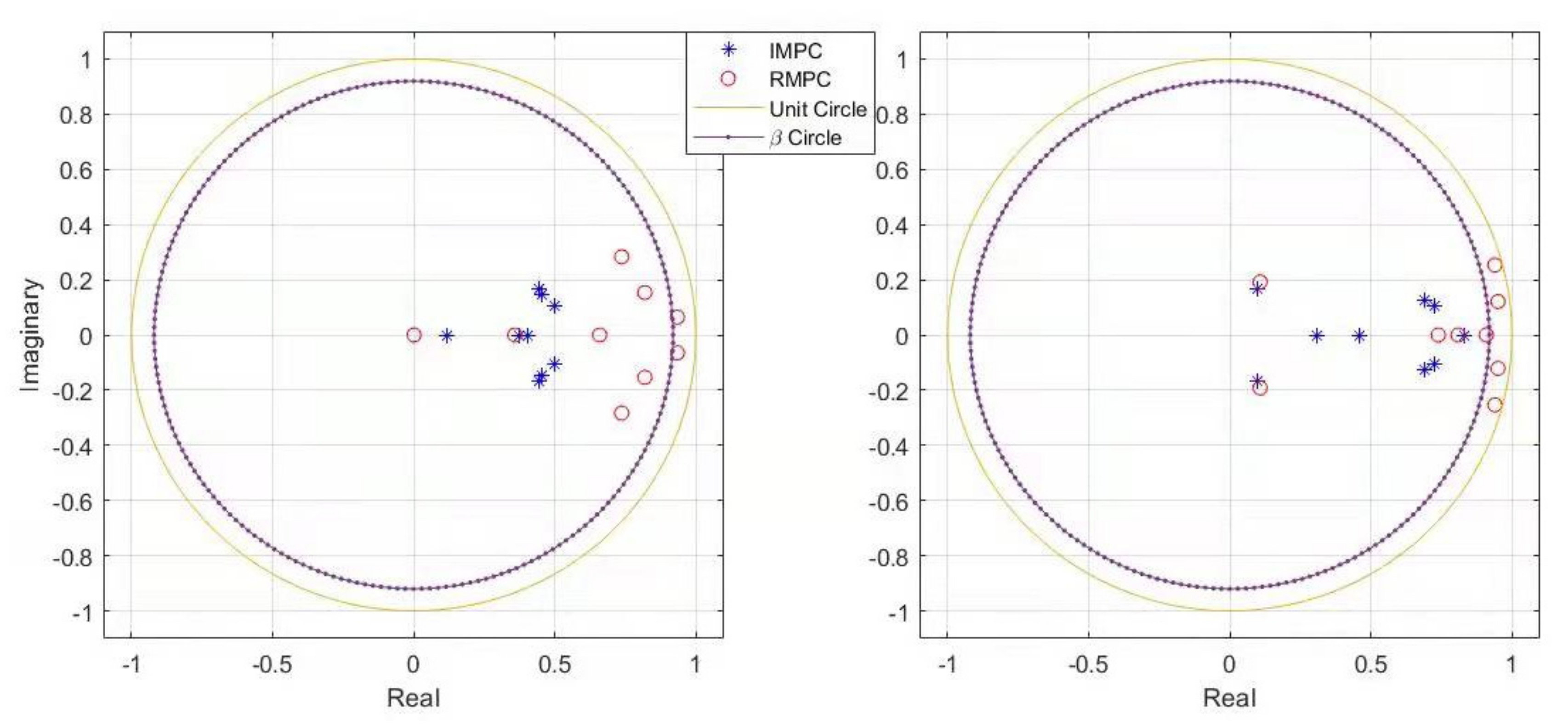
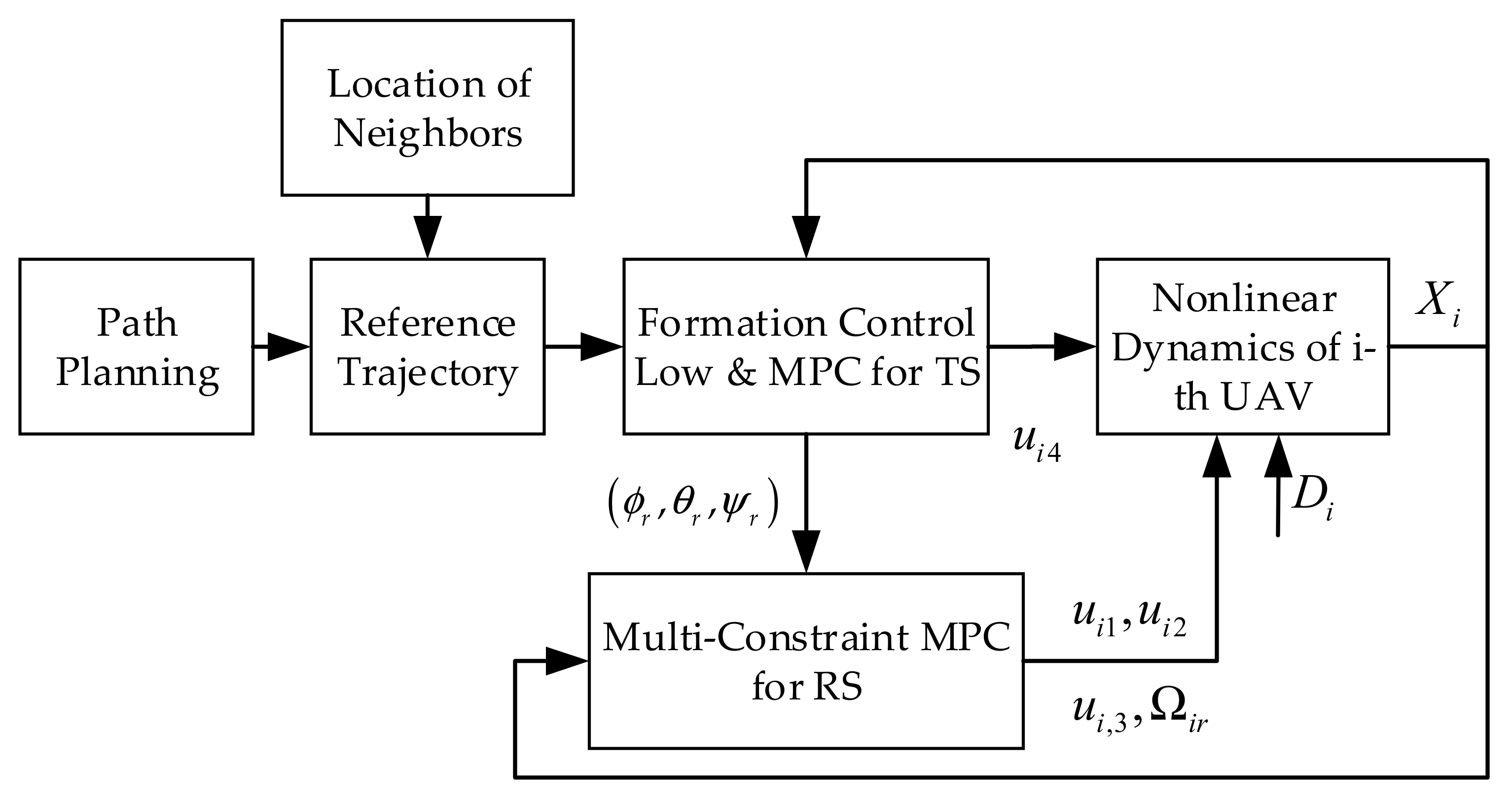
3. Multi-Constrained MPC
3.1. MPC of TS
3.2. MPC of the Rotational Subsystem
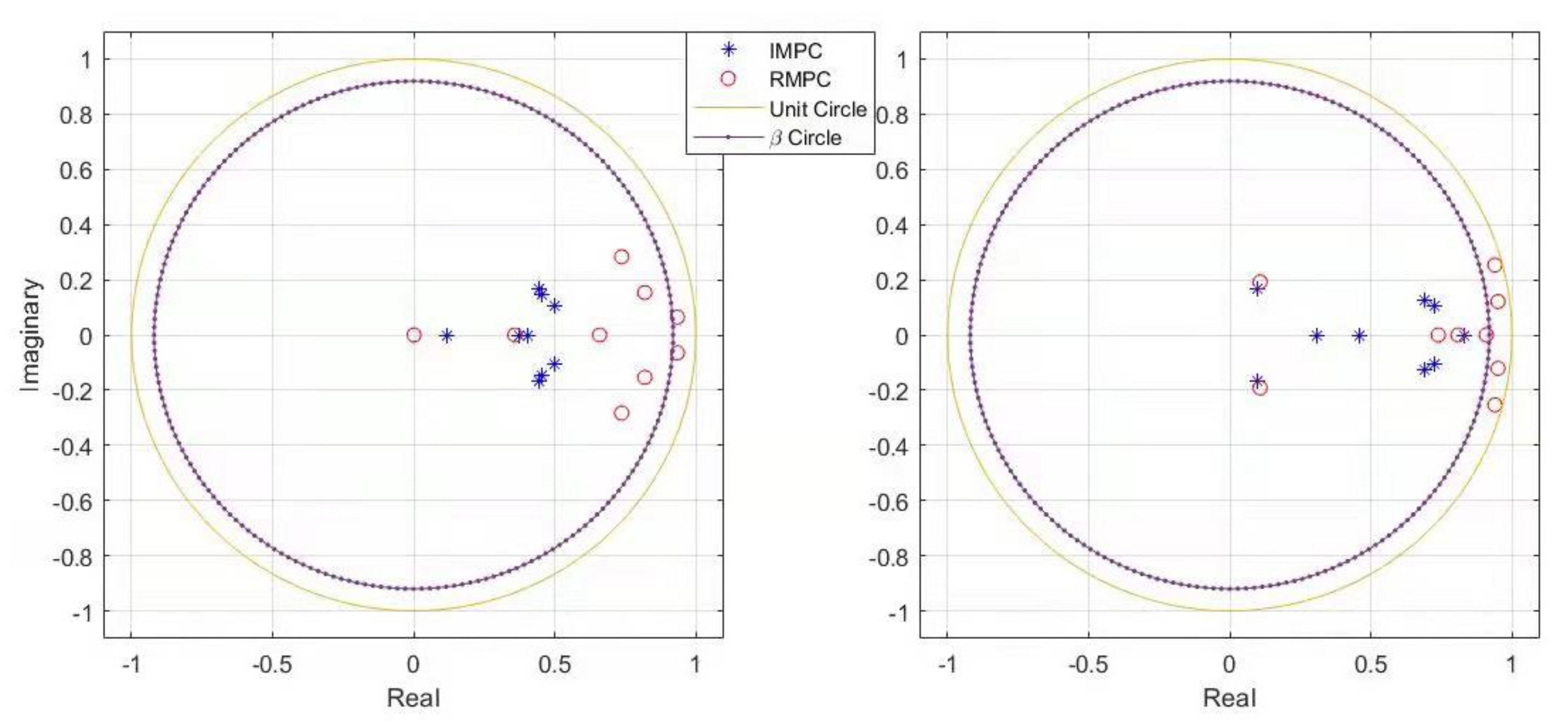
4. Stability Analysis
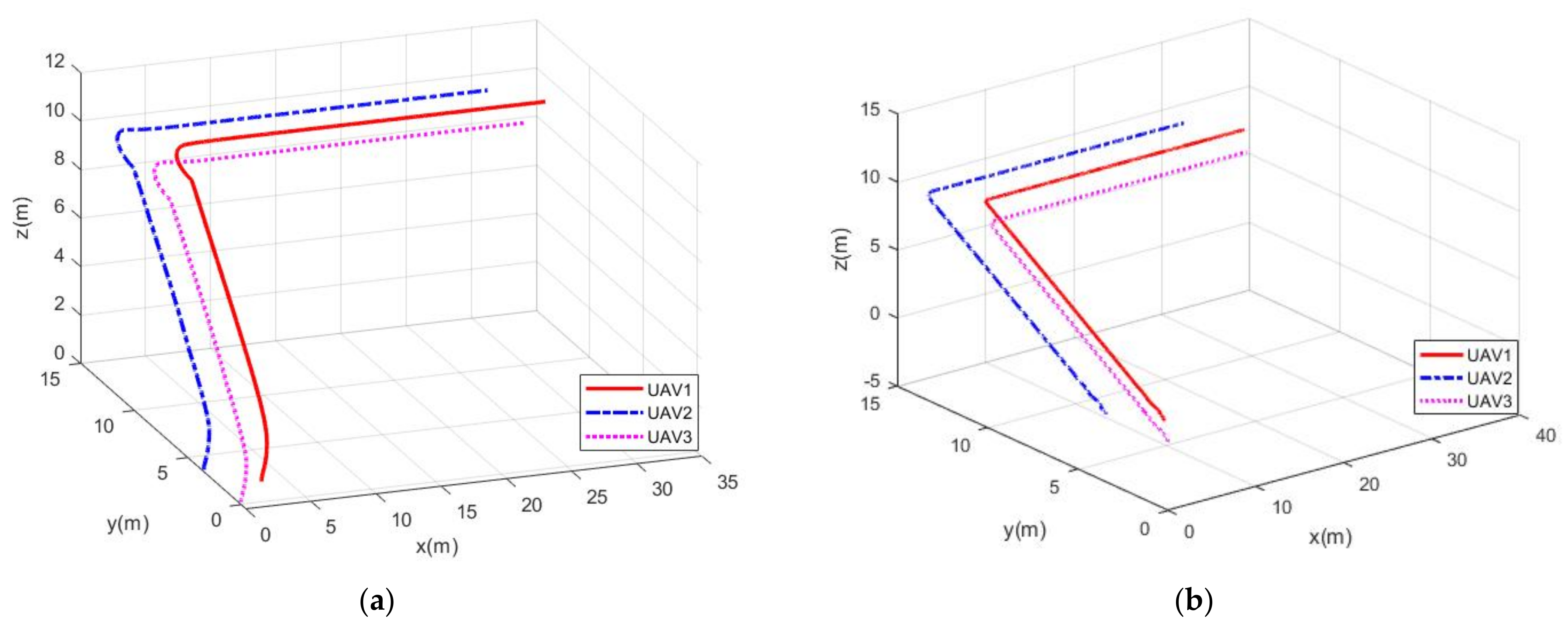
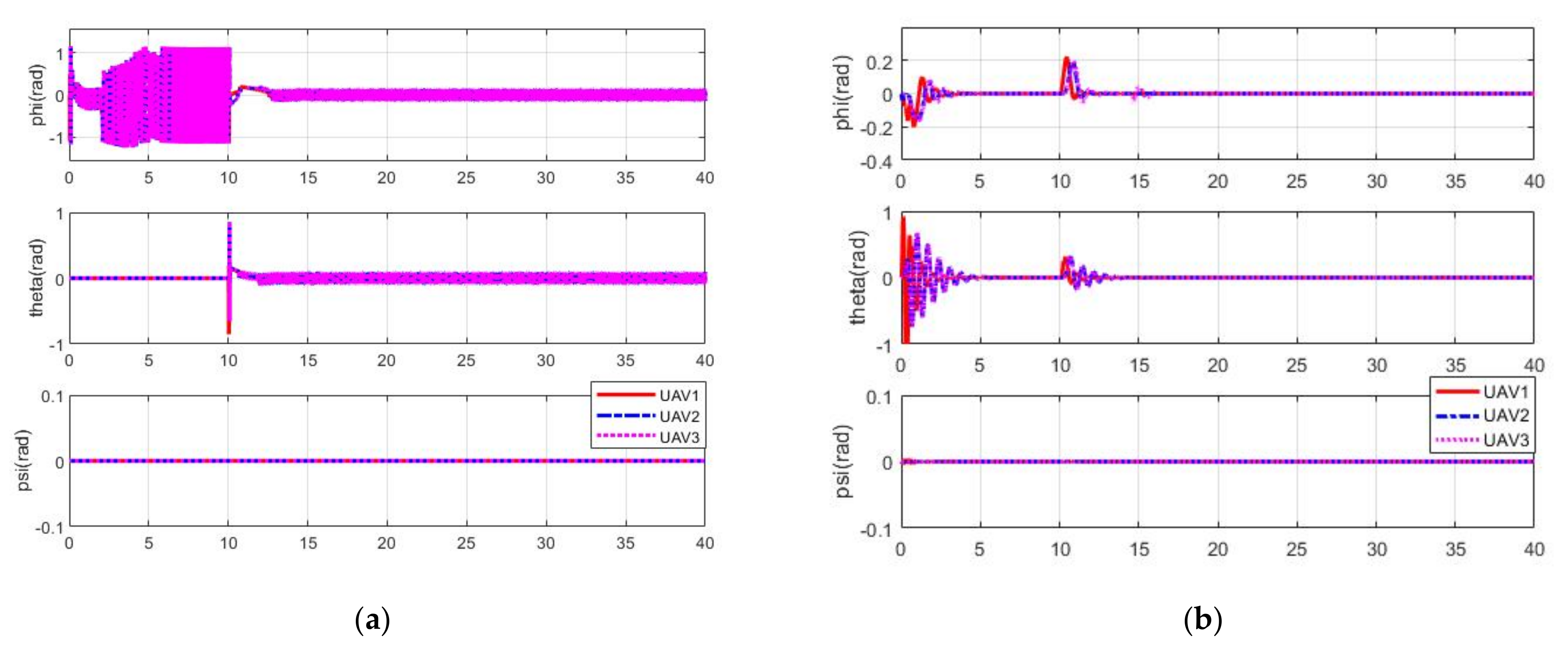
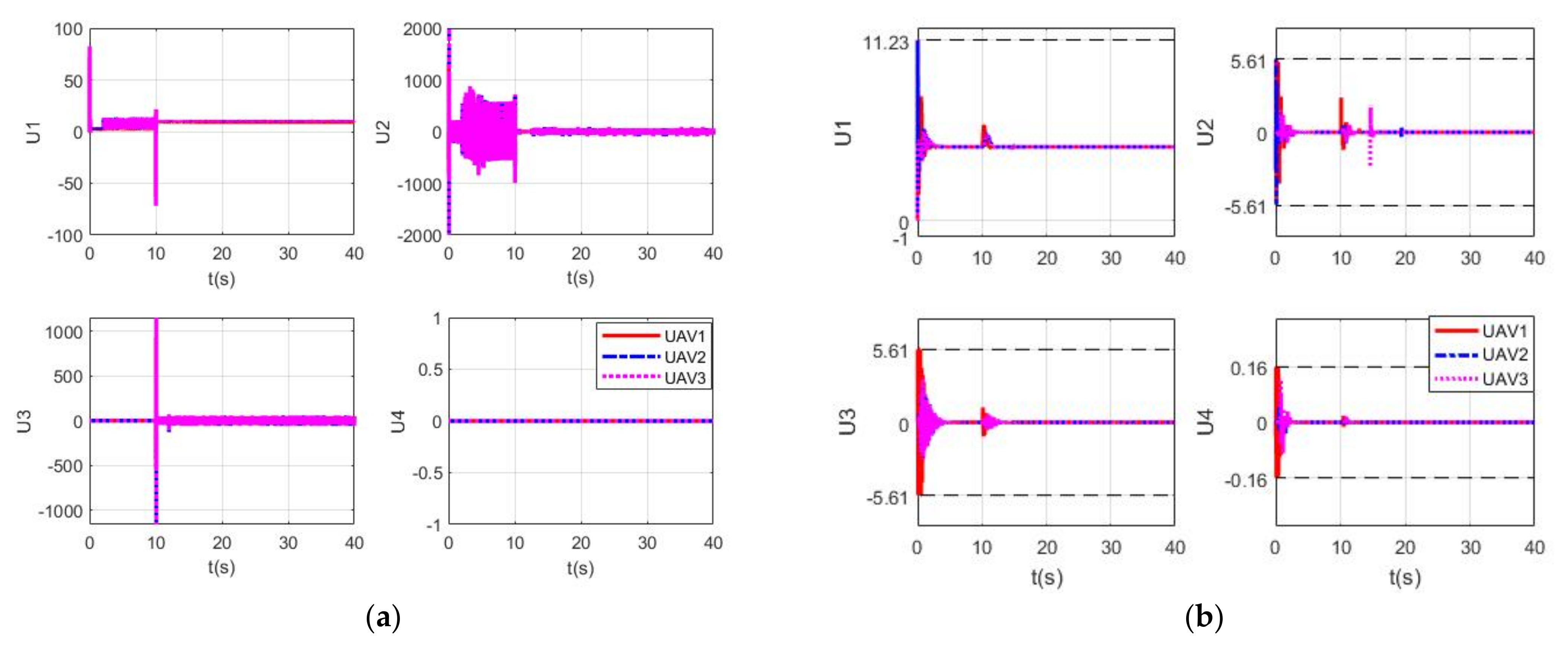
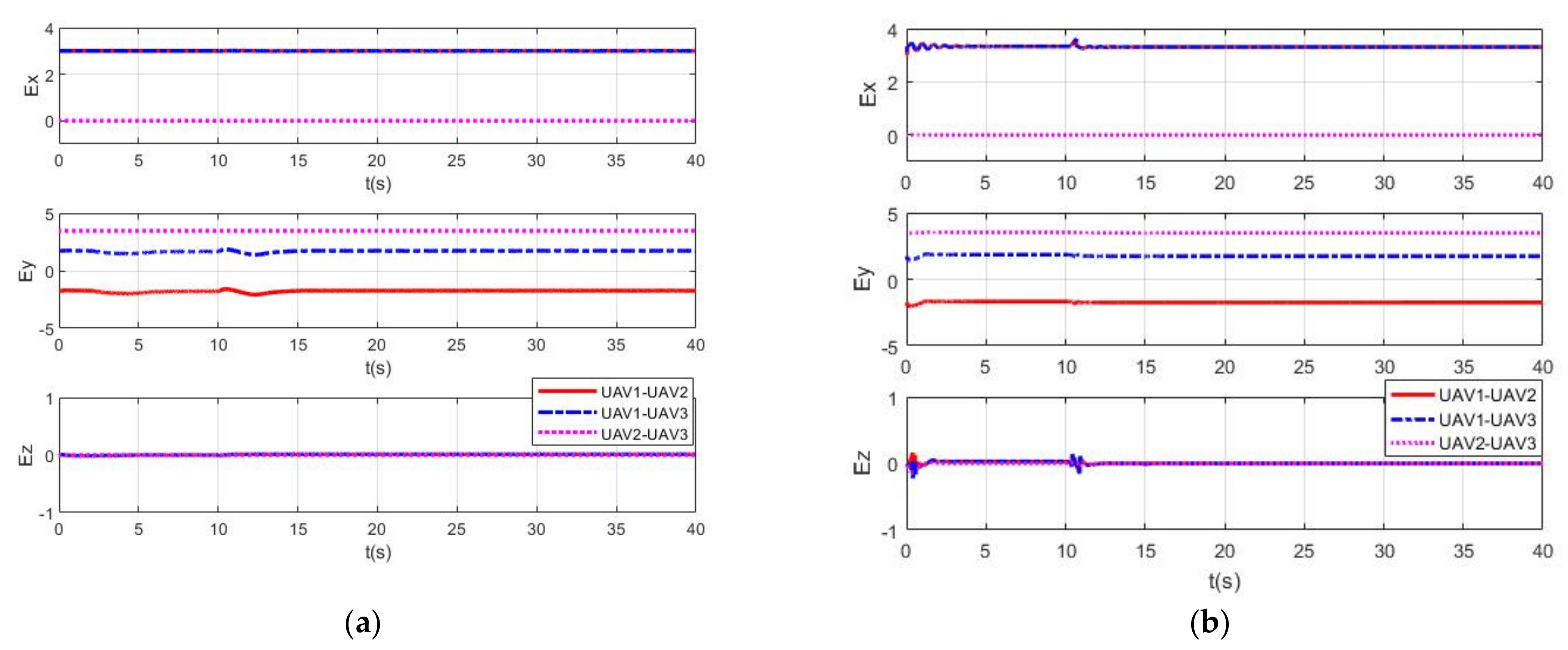
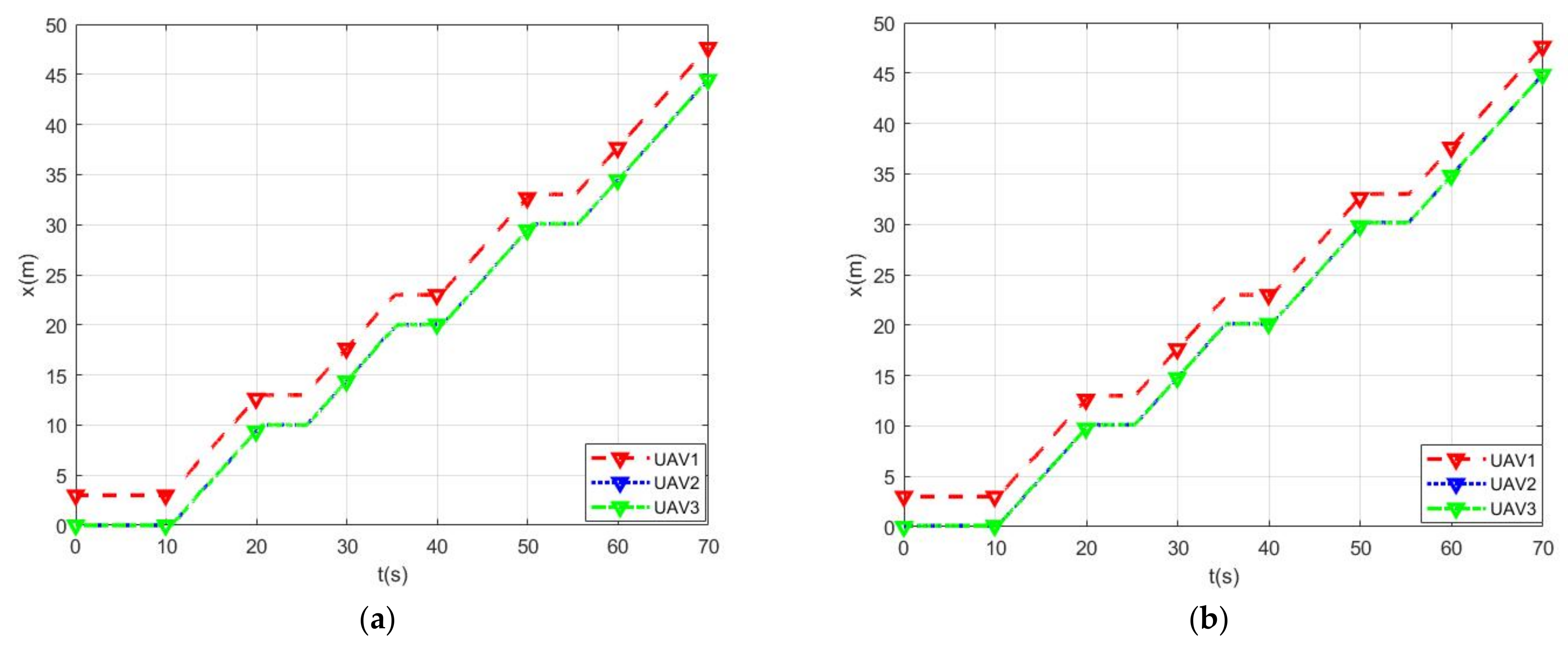
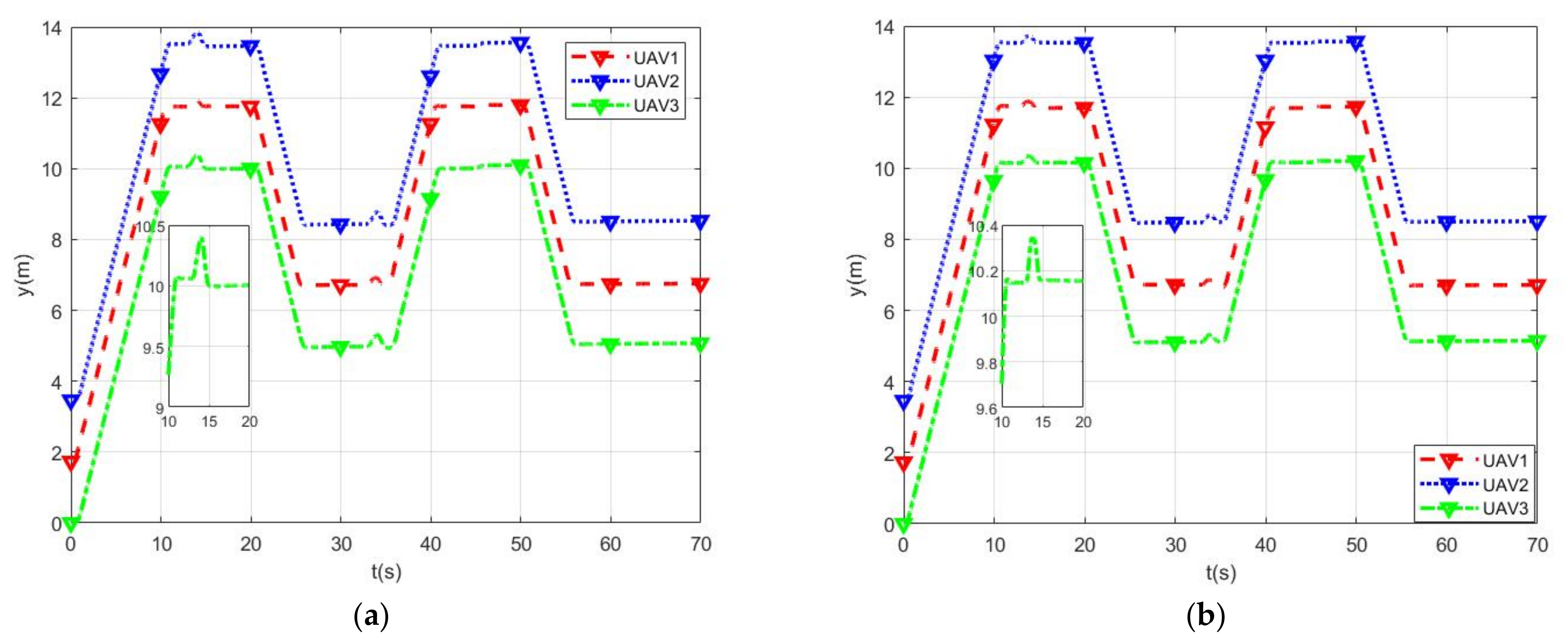
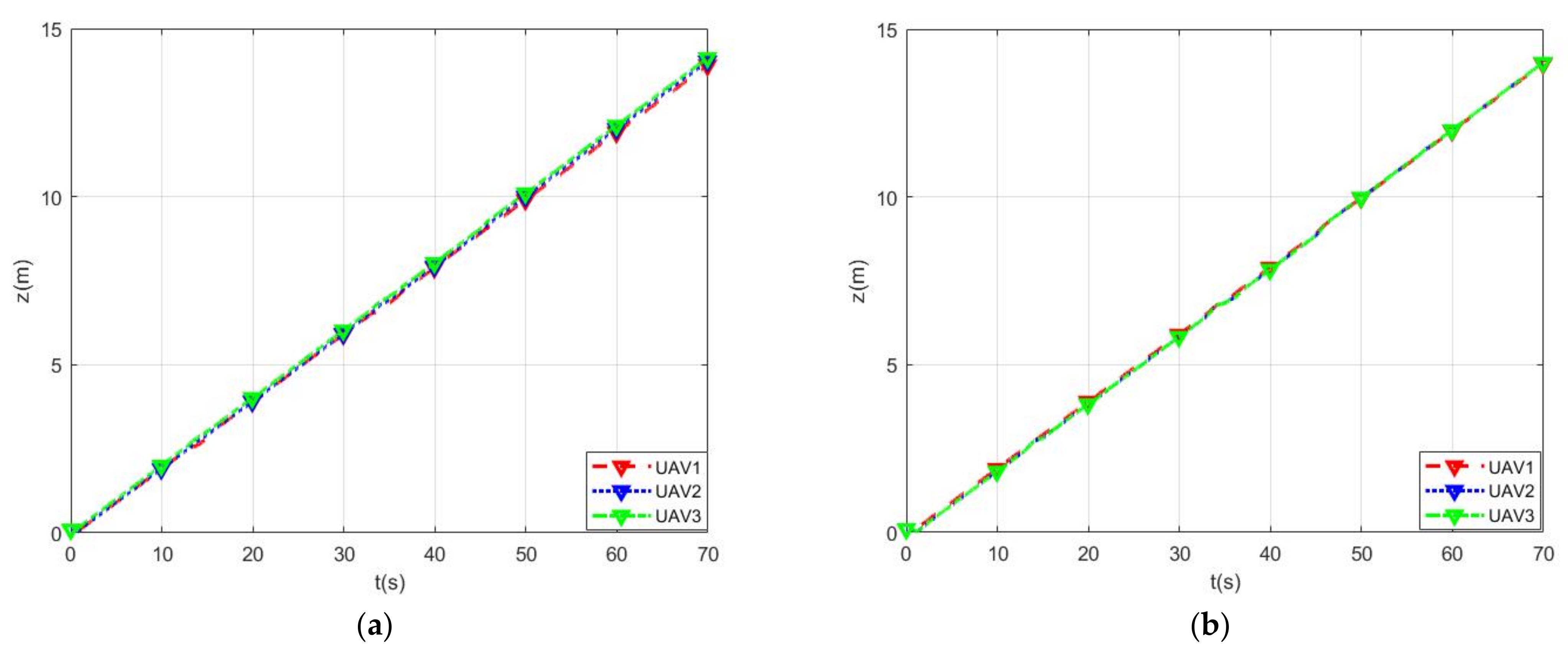
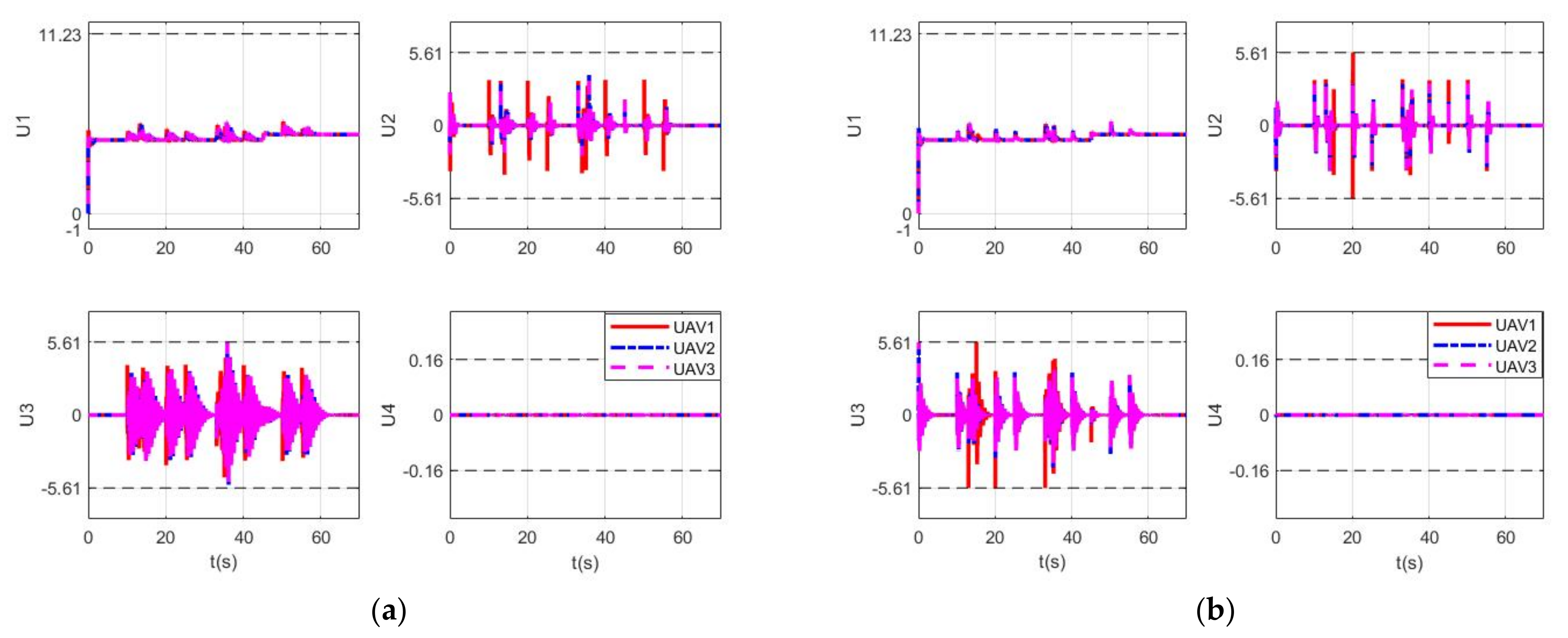
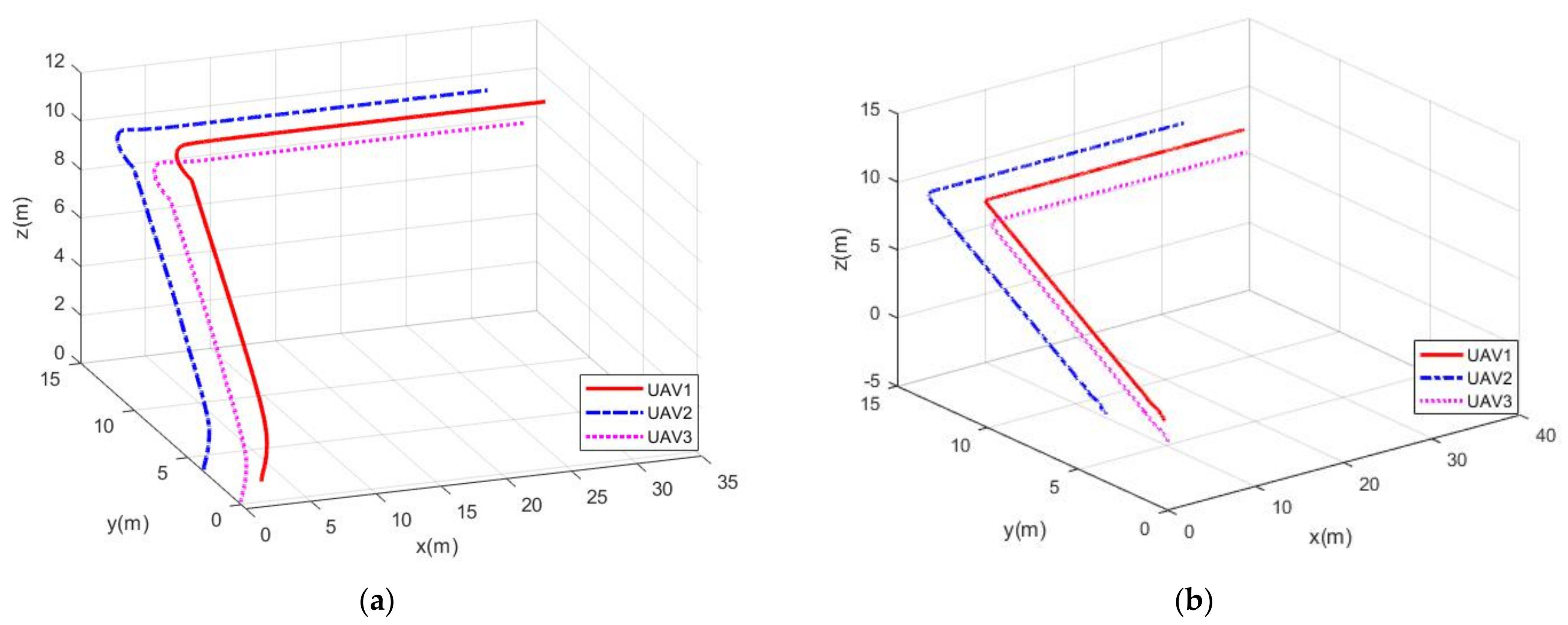
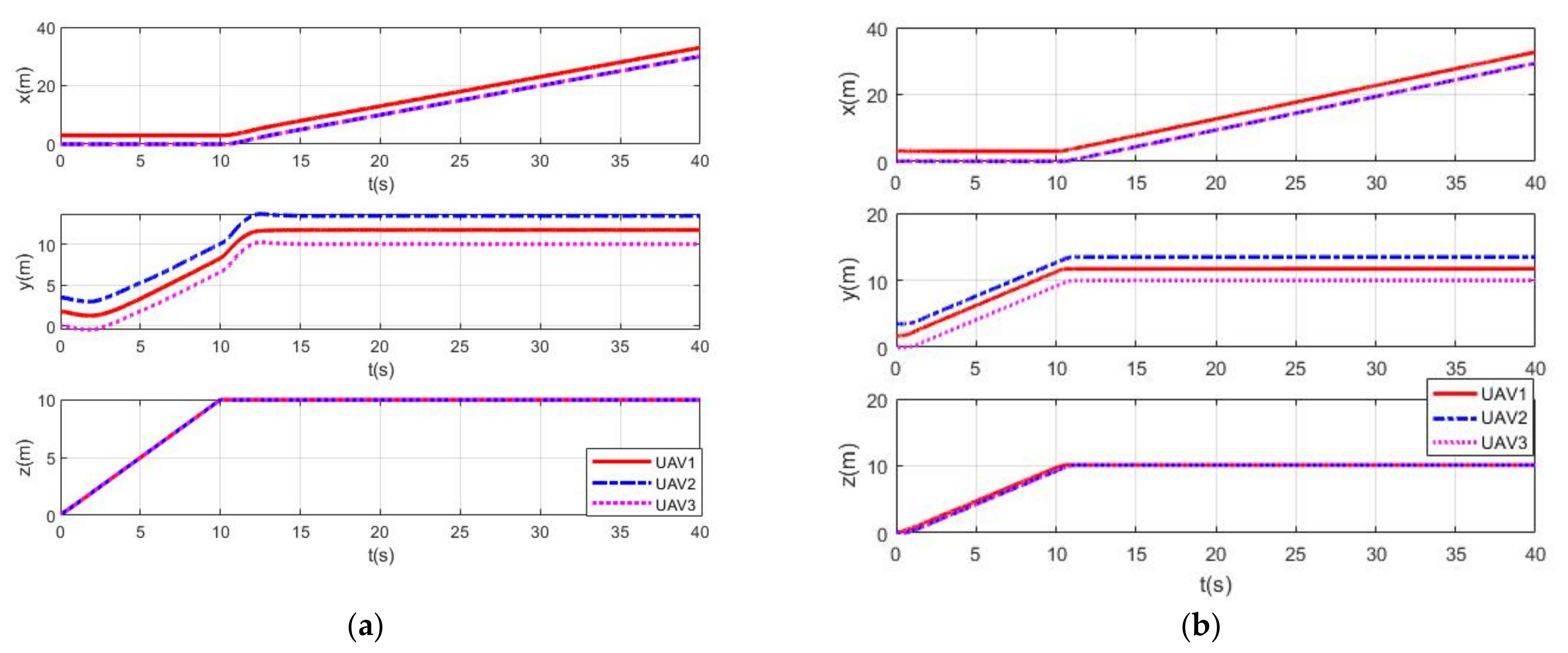
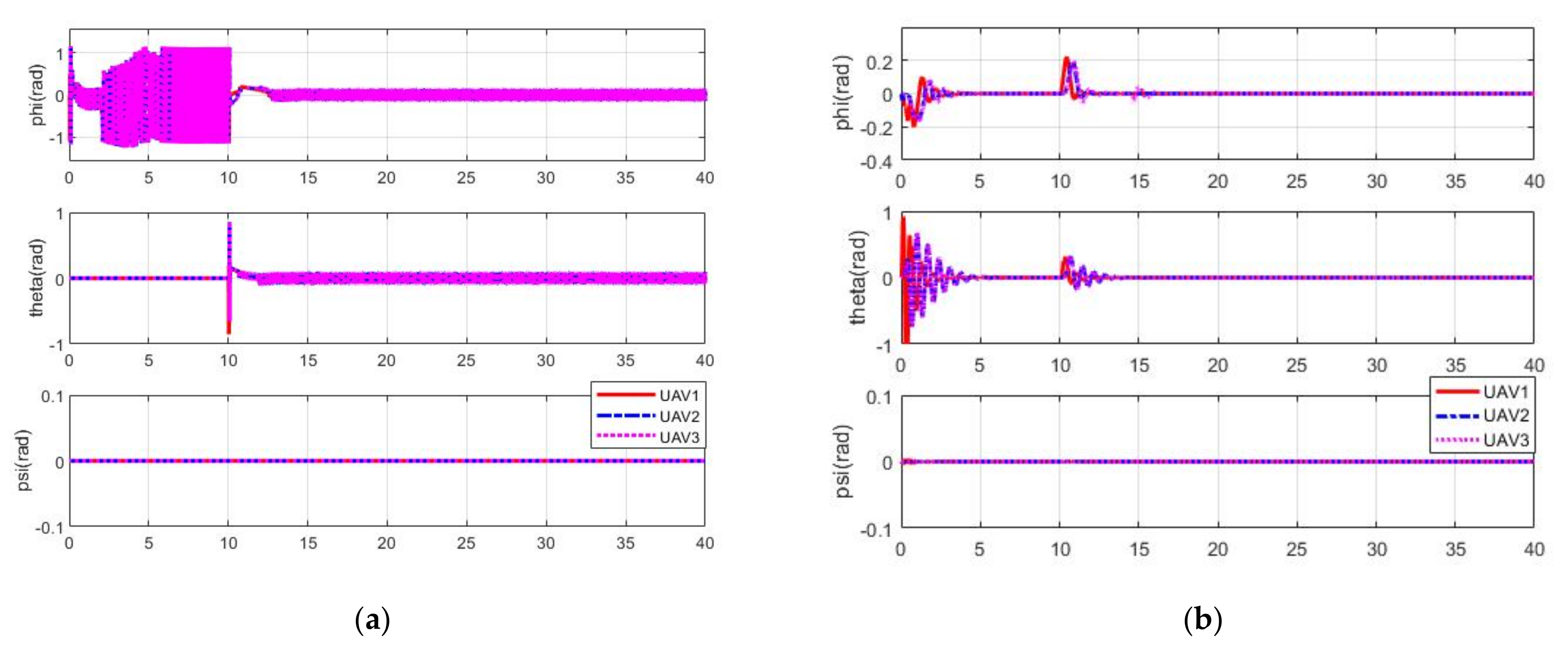
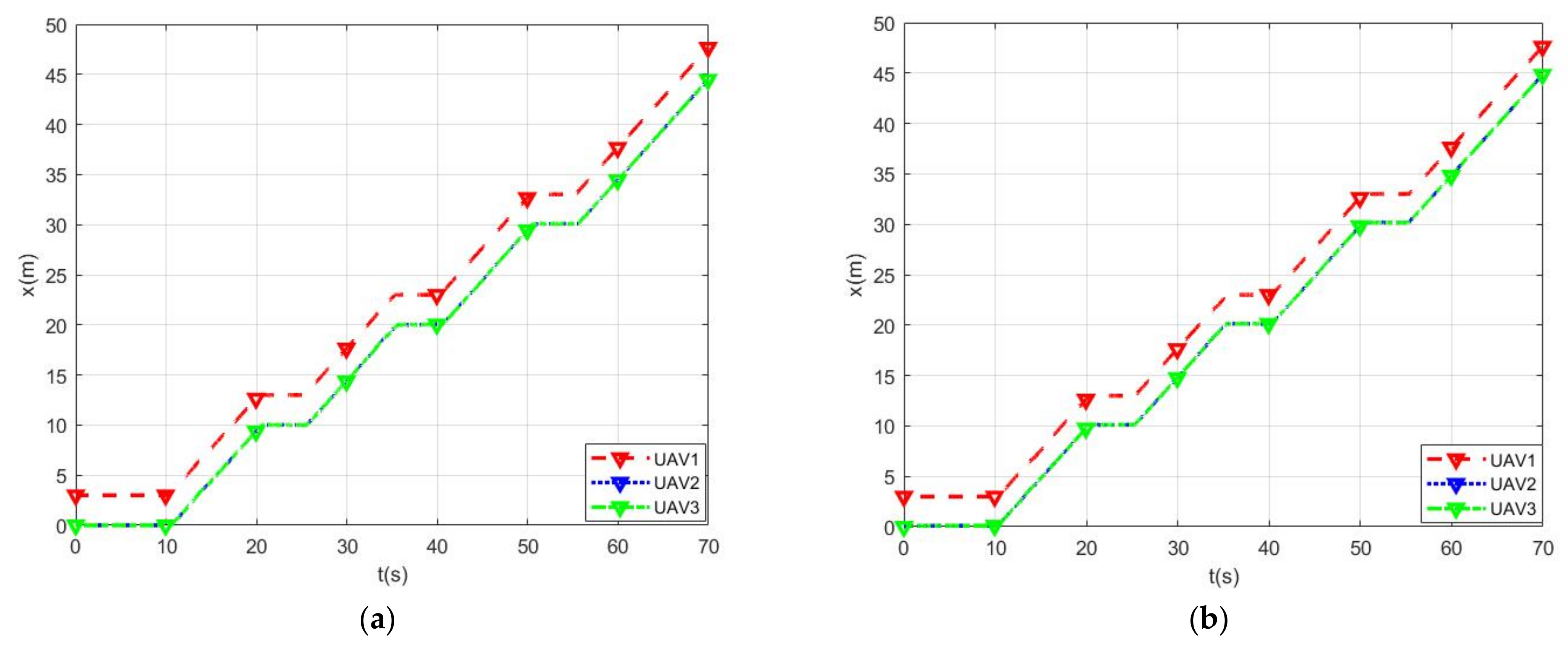
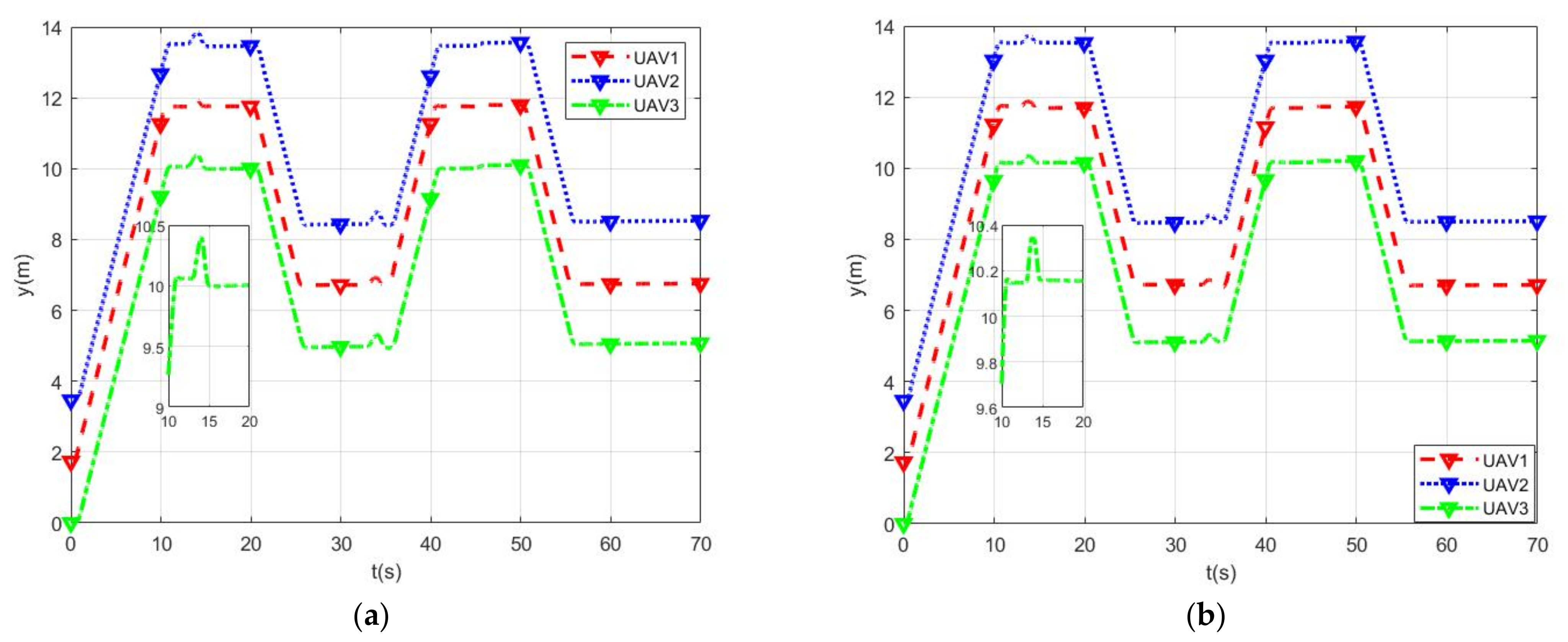
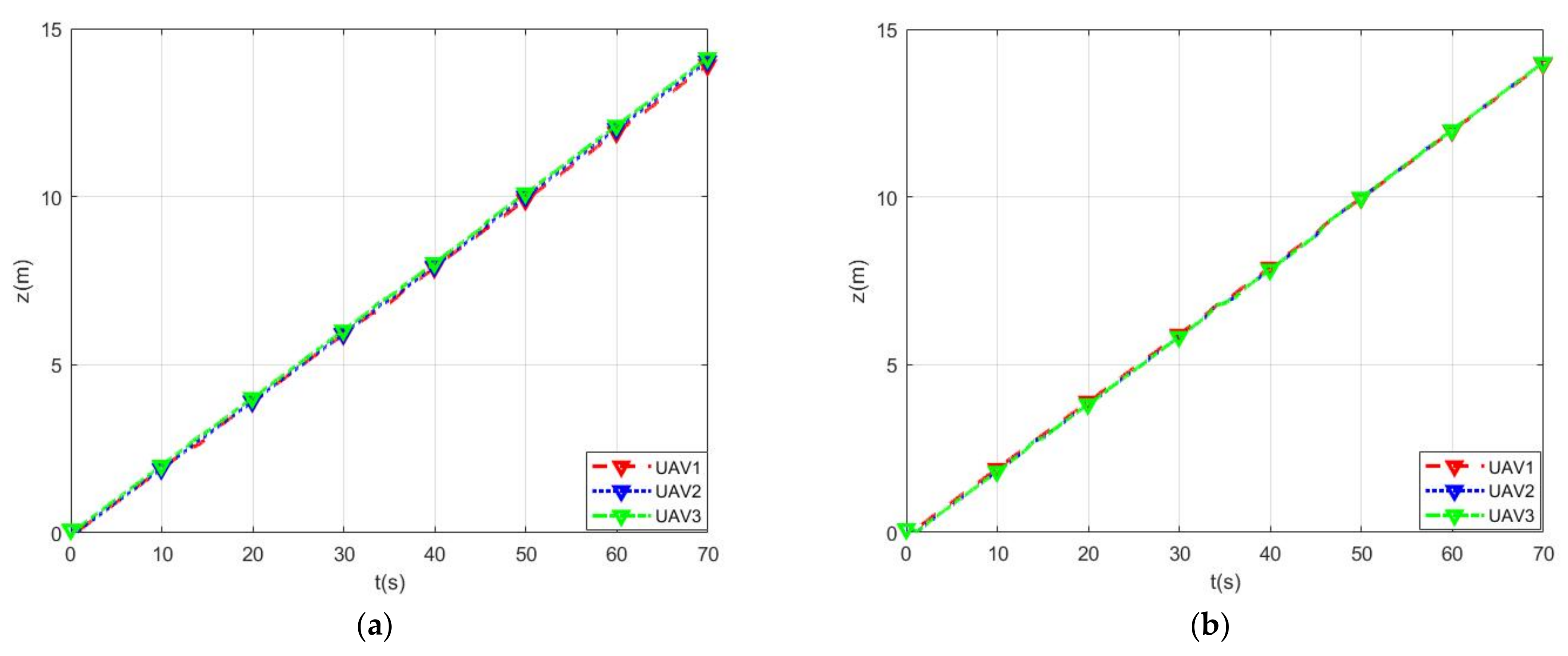
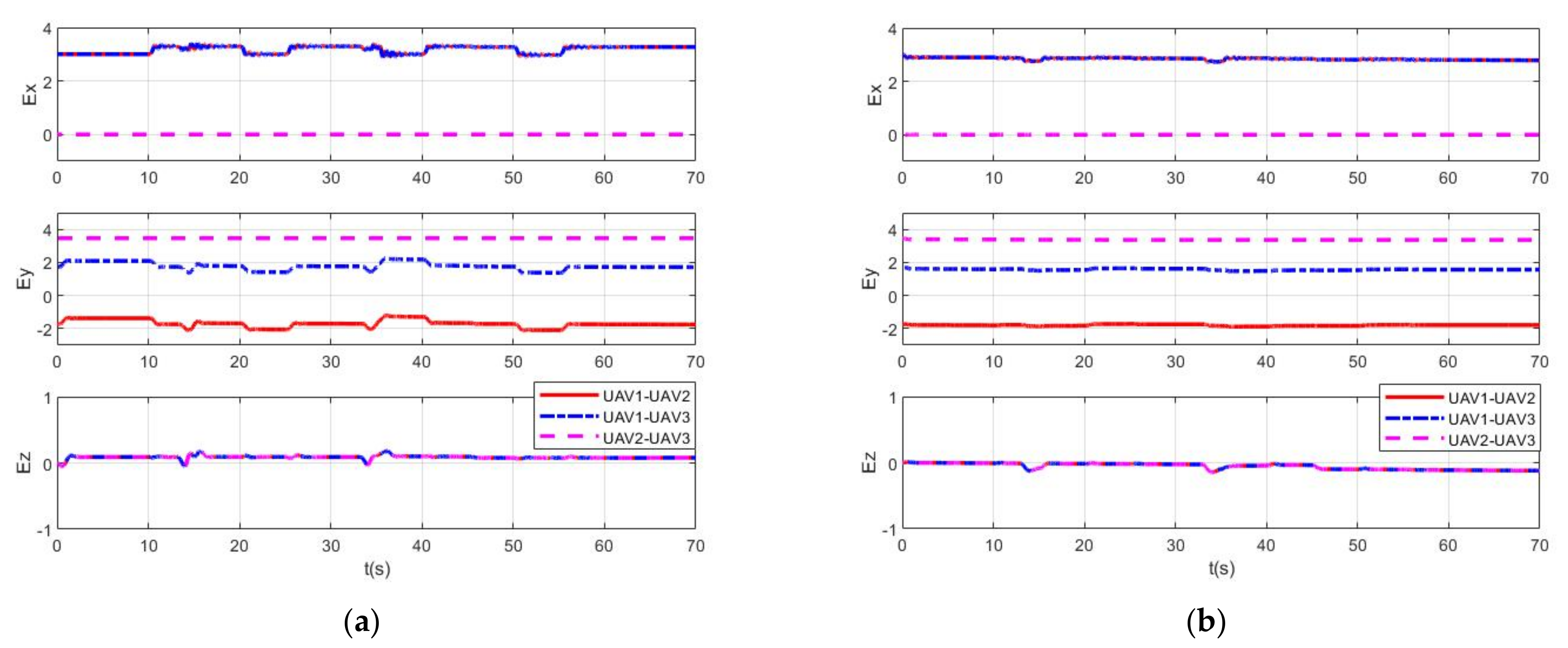
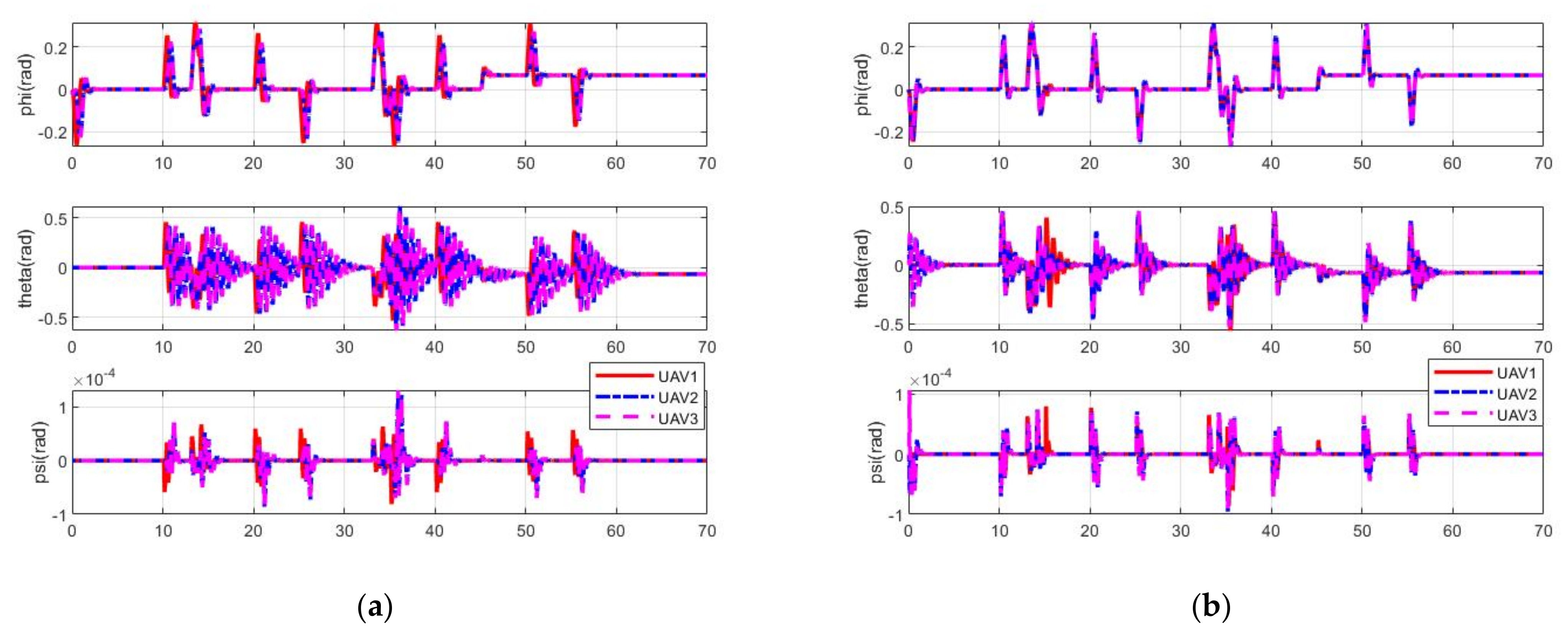
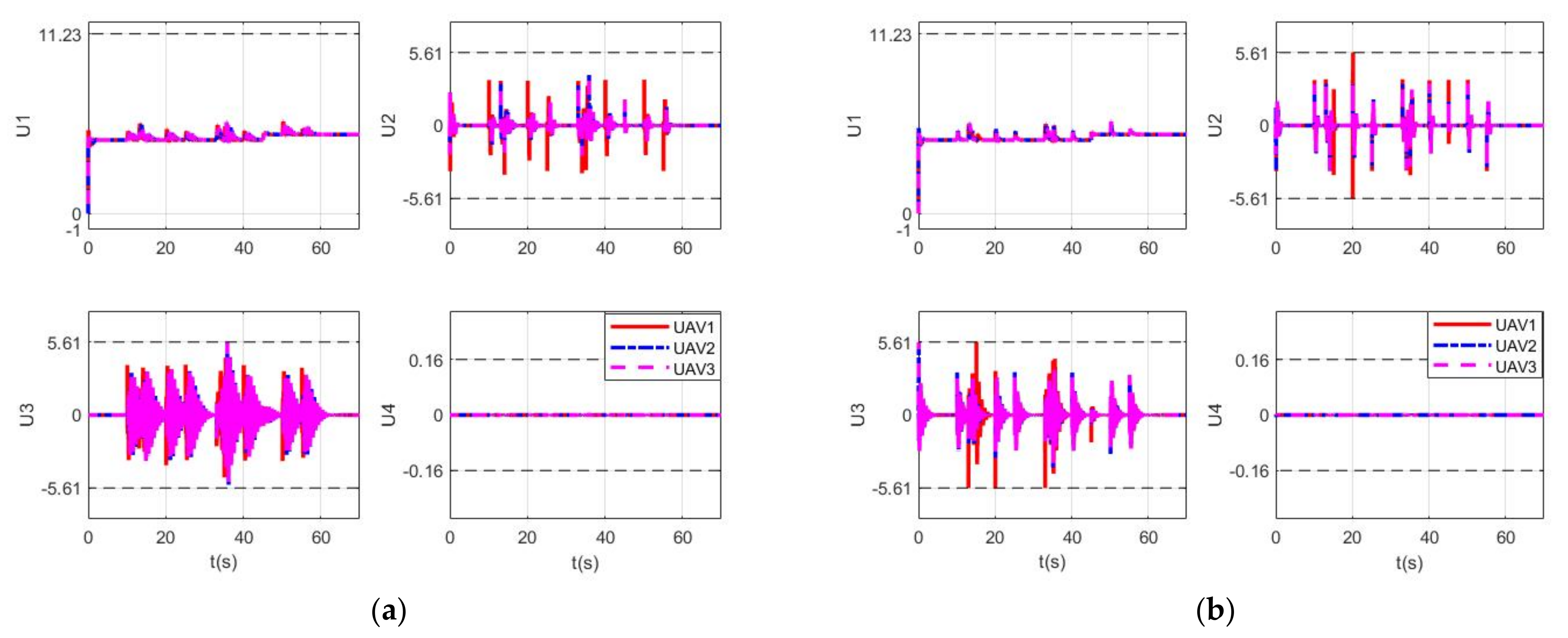
5. Simulation
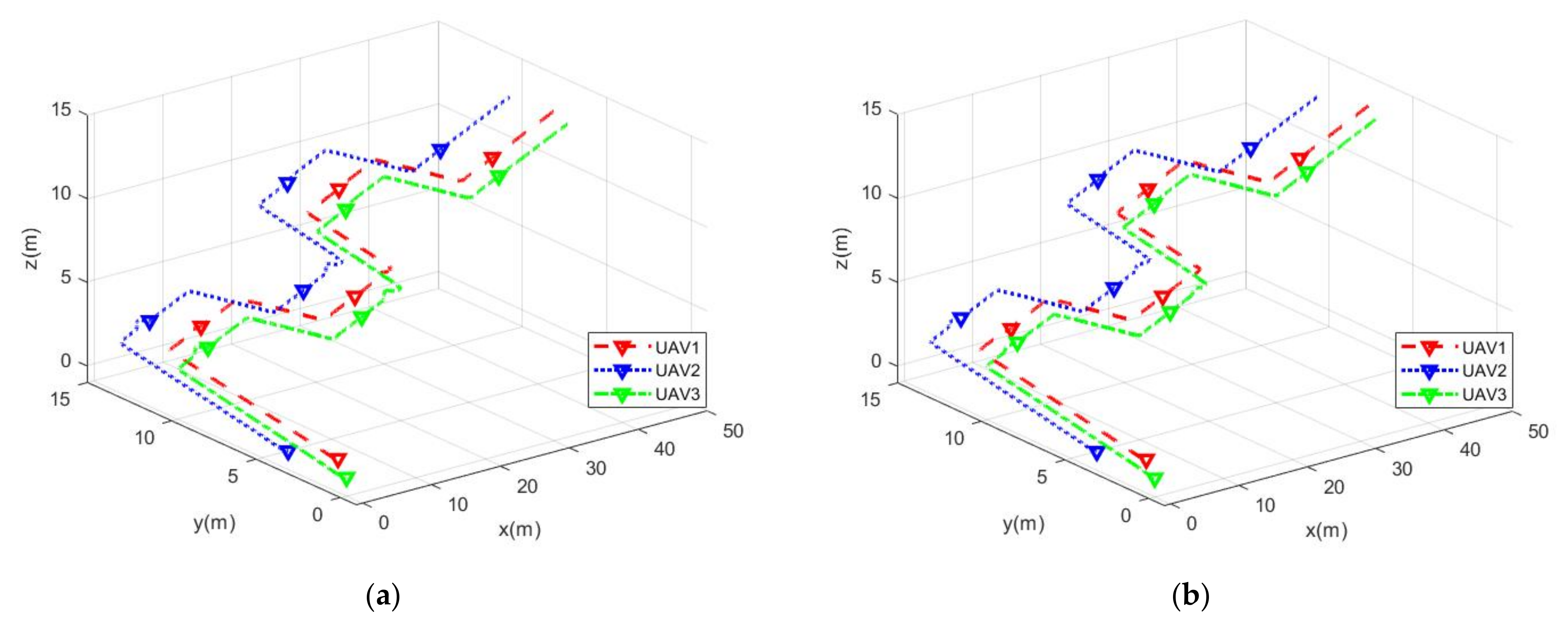
5.1. Case 1
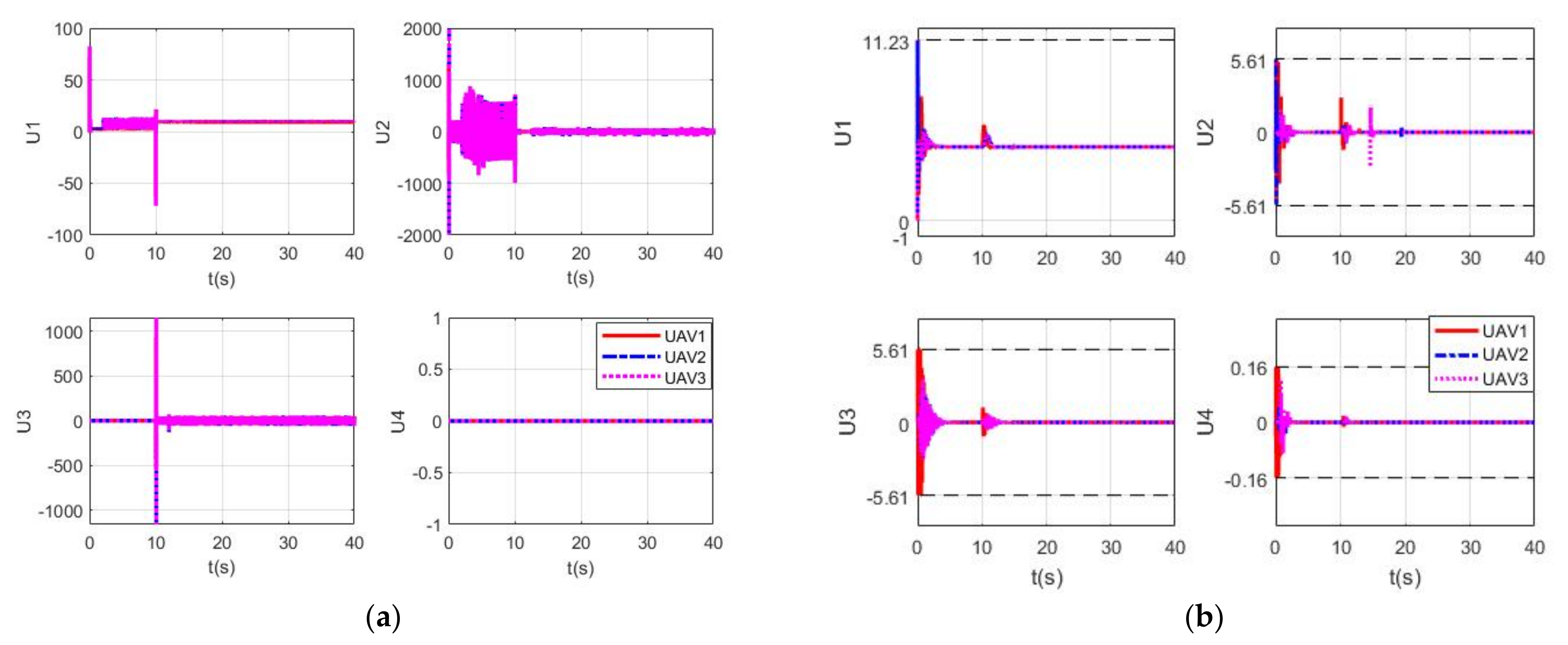
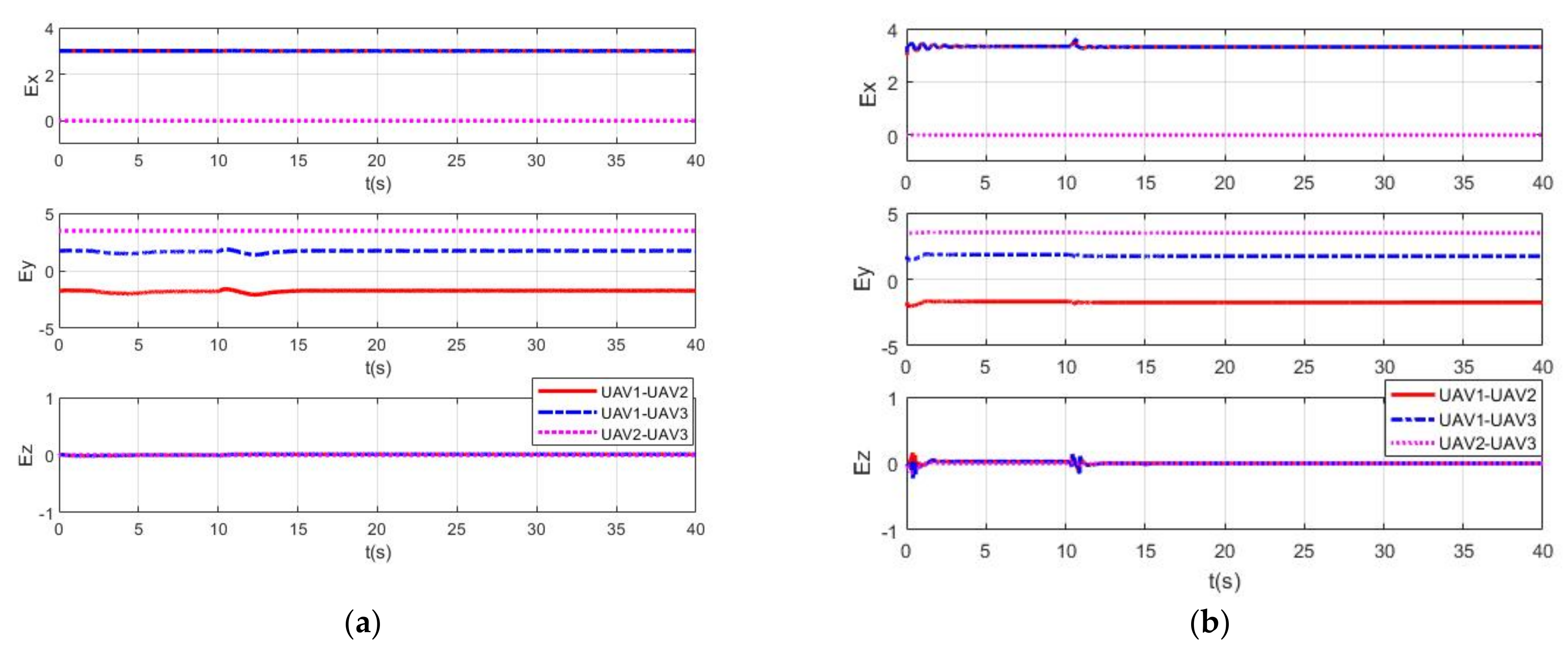
5.2. Case 2
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Josep, M.G.; Rogelio, L. Flight Formation Control; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Zong, Q.; Wang, D.; Shao, S.; Zhang, B.; Han, Y. Research status and development of multi UAV coordinated formation flight control. J. Harbin Inst. Technol. 2017, 49, 1–14. [Google Scholar]
- Fu, X.; Pan, J.; Wang, H.; Gao, X. A Formation Maintenance and Reconstruction Method of UAV Swarm based on Distributed Control. Aerosp. Sci. Technol. 2020, 104, 105981. [Google Scholar] [CrossRef]
- Liu, H.; Lyu, Y.; Zhao, W. Robust visual servoing formation tracking control for quadrotor UAV team. Aerosp. Sci. Technol. 2020, 106, 106061. [Google Scholar] [CrossRef]
- Zhen, Z.; Tao, G.; Xu, Y.; Song, G. Multivariable adaptive control based consensus flight control system for UAVs formation. Aerosp. Sci. Technol. 2019, 93, 105336. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, Y.; Jiang, B.; Su, C.Y.; Fu, J.; Jin, Y.; Chai, T. Decentralized fractional-order backstepping fault-tolerant control of multi-UAVs against actuator faults and wind effects. Aerosp. Sci. Technol. 2020, 104, 105939. [Google Scholar] [CrossRef]
- Wolfe, S.; Givigi, S.; Rabbath, C.A. Distributed Multiple Model MPC for Target Tracking UAVs. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 9–12 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 123–130. [Google Scholar]
- Huang, H.; Zhou, H.; Zheng, M.; Xu, C.; Zhang, X.; Xiong, W. Cooperative Collision Avoidance Method for Multi-UAV Based on Kalman Filter and Model Predictive Control. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Kuriki, Y.; Namerikawa, T. Formation Control with Collision Avoidance for a Multi-UAV System Using Decentralized MPC and Consensus-Based Control. SICE J. Control Meas. Syst. Integr. 2015, 8, 285–294. [Google Scholar] [CrossRef]
- Chao, Z.; Zhou, S.L.; Ming, L.; Zhang, W.G. UAV Formation Flight Based on Nonlinear Model Predictive Control. Math. Probl. Eng. 2012, 2012, 261367. [Google Scholar] [CrossRef]
- Liao, F.; Teo, R.; Wang, J.L.; Dong, X.; Lin, F.; Peng, K. Distributed Formation and Reconfiguration Control of VTOL UAVs. IEEE Trans. Control Syst. Technol. 2017, 25, 270–277. [Google Scholar] [CrossRef]
- Hegde, A.; Ghose, D. Multi-UAV Distributed Control for Load Transportation in Precision Agriculture. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2068. [Google Scholar]
- Zhang, Q.; Guo, H.; Xiaohang, S. Formation Control of High-Order Swarm Systems with Time-Varying Delays and Switching Interconnections. IEEE Access 2020, 8, 28188–28196. [Google Scholar] [CrossRef]
- Shadeed, O.; Türkmen, H.; Koyuncu, E. Trajectory-based Agile Multi UAV Coordination through Time Synchronisation. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 0986. [Google Scholar]
- Sayyaadi, H.; Soltani, A. Decentralized polynomial trajectory generation for flight formation of quadrotors. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2017, 231, 690–707. [Google Scholar] [CrossRef]
- Zhihao, C.A.; Longhong, W.A.; Jiang, Z.H.; Kun, W.U.; Yingxun, W.A. Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs. Chin. J. Aeronaut. 2019, 33, 1037–1056. [Google Scholar]
- Redrovan, D.V.; Kim, D. Multiple quadrotors flight formation control based on sliding mode control and trajectory tracking. In Proceedings of the 2018 International Conference on Electronics, Information, and Communication (ICEIC), Honolulu, HI, USA, 24–27 January 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Eskandarpour, A.; Majd, V.J. Cooperative formation control of quadrotors with obstacle avoidance and self collisions based on a hierarchical MPC approach. In Proceedings of the 2014 Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 15–17 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 351–356. [Google Scholar]
- Yan, D.; Zhang, W.; Chen, H. Research on Consensus Formation Based on Double Closed-Loop Sliding Mode Control. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5550–5556. [Google Scholar]
- Huang, Y.; Liu, W.; Li, B.; Yang, Y.; Xiao, B. Finite-time Formation Tracking Control with Collision Avoidance for Quadrotor UAVs. J. Frankl. Inst.-Eng. Appl. Math. 2020, 357, 4034–4058. [Google Scholar] [CrossRef]
- Liang, X.; Su, Z.; Zhou, W.; Meng, G.; Zhu, L. Fault-tolerant control for the multi-quadrotors cooperative transportation under suspension failures. Aerosp. Sci. Technol. 2021, 119, 107139. [Google Scholar] [CrossRef]
- Messai, N.; Nguyen, D.H.; Manamanni, N. Robust formation control under state constraints of multi-agent systems in clustered networks. Syst. Control Lett. 2020, 140, 104689. [Google Scholar]
- Guo, Y.; Chen, G.; Zhao, T. Learning-based collision-free coordination for a team of uncertain quadrotor UAVs. Aerosp. Sci. Technol. 2021, 119, 107127. [Google Scholar] [CrossRef]
- Thien RT, Y.; Kim, Y. Decentralized formation flight via PID and integral sliding mode control. Aerosp. Sci. Technol. 2018, 81, 322–332. [Google Scholar] [CrossRef]
- Liu, D.; Liu, H.; Xi, J. Fully distributed adaptive fault-tolerant formation control for octorotors subject to multiple actuator faults. Aerosp. Sci. Technol. 2021, 108, 106366. [Google Scholar] [CrossRef]
- Wang, J.; Han, L.; Dong, X.; Li, Q.; Ren, Z. Distributed sliding mode control for time-varying formation tracking of multi-UAV system with a dynamic leader. Aerosp. Sci. Technol. 2021, 111, 106549. [Google Scholar] [CrossRef]
- Wu, Y.; Gou, J.; Hu, X.; Huang, Y. A new consensus theory-based method for formation control and obstacle avoidance of UAVs. Aerosp. Sci. Technol. 2020, 107, 106332. [Google Scholar] [CrossRef]
- Dubay, S.; Pan, Y.J. Distributed MPC based collision avoidance approach for consensus of multiple quadcopters. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 155–160. [Google Scholar]
- Yan, D.; Zhang, W.; Chen, H.; Shi, J. Research on Multi-UAVs’ Sliding Mode Consensus Formation Control with Delay and Disturbance Constraints. J. Northwestern Polytech. Univ. 2020, 38, 420–426. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, T.; Liu, Z. Robust model predictive control for path-following of under actuated surface vessels with roll constraints. Ocean. Eng. 2017, 143, 125–132. [Google Scholar] [CrossRef]
- Greatwood, C.; Richards, A.G. Reinforcement learning and model predictive control for robust embedded quadrotor guidance and control. Auton. Robot. 2019, 43, 1681–1693. [Google Scholar] [CrossRef] [Green Version]
- Alonso-Mora, J.; Montijano, E.; Nägeli, T.; Hilliges, O.; Schwager, M.; Rus, D. Distributed multi-robot formation control in dynamic environments. Auton. Robot. 2019, 43, 1079–1100. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Go, T.H. Quadcopter formation flight control combining MPC and robust feedback linearization. J. Frankl. Inst. 2014, 351, 1335–1355. [Google Scholar] [CrossRef]
- Eskandarpour, A.; Sharf, I.A. constrained error-based MPC for path following of quadrotor with stability analysis. Nonlinear Dyn. 2020, 99, 899–918. [Google Scholar] [CrossRef]
- Wang, L. Model Predictive Control System Design and Implementation Using MATLAB®; Springer Science & Business Media: Melbourne, Australia, 2009. [Google Scholar]
- Kwon, W.H.; Han, S.H. Receding Horizon Control: Model Predictive Control for State Models; Springer Science & Business Media: London, UK, 2006. [Google Scholar]
- Zhang, Q. Modeling, Analysis, and Control of Close Formation Flight; University of Toronto: Toronto, ON, Canada, 2019. [Google Scholar]
- Jinkun, L. MATLAB Simulation of Sliding Mode Variable Structure Control; Tsinghua University Press Limited: Beijing, China, 2005. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition Number of TS | Condition Number of RS | Average Calculation Period of TS | Average Calculation Period of RS | |
|---|---|---|---|---|
| RMPC | 407.92 | 0.0104 s | 0.0121 s | |
| IMPC | 51.56 | 243.91 | 0.0052 s | 0.0086 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, D.; Zhang, W.; Chen, H. Design of a Multi-Constraint Formation Controller Based on Improved MPC and Consensus for Quadrotors. Aerospace 2022, 9, 94. https://doi.org/10.3390/aerospace9020094
Yan D, Zhang W, Chen H. Design of a Multi-Constraint Formation Controller Based on Improved MPC and Consensus for Quadrotors. Aerospace. 2022; 9(2):94. https://doi.org/10.3390/aerospace9020094
Chicago/Turabian StyleYan, Danghui, Weiguo Zhang, and Hang Chen. 2022. "Design of a Multi-Constraint Formation Controller Based on Improved MPC and Consensus for Quadrotors" Aerospace 9, no. 2: 94. https://doi.org/10.3390/aerospace9020094
APA StyleYan, D., Zhang, W., & Chen, H. (2022). Design of a Multi-Constraint Formation Controller Based on Improved MPC and Consensus for Quadrotors. Aerospace, 9(2), 94. https://doi.org/10.3390/aerospace9020094