
Three-Dimensional Flight Envelope for V/STOL Aircraft with Multiple Flight Modes


Abstract
1. Introduction
2. Constitution and Graphs of the 3D Envelope
2.1. Longitudinal Equilibrium of V/STOL Aircraft
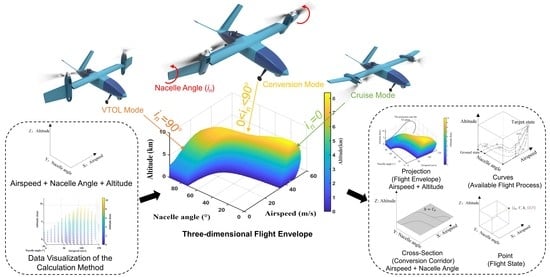
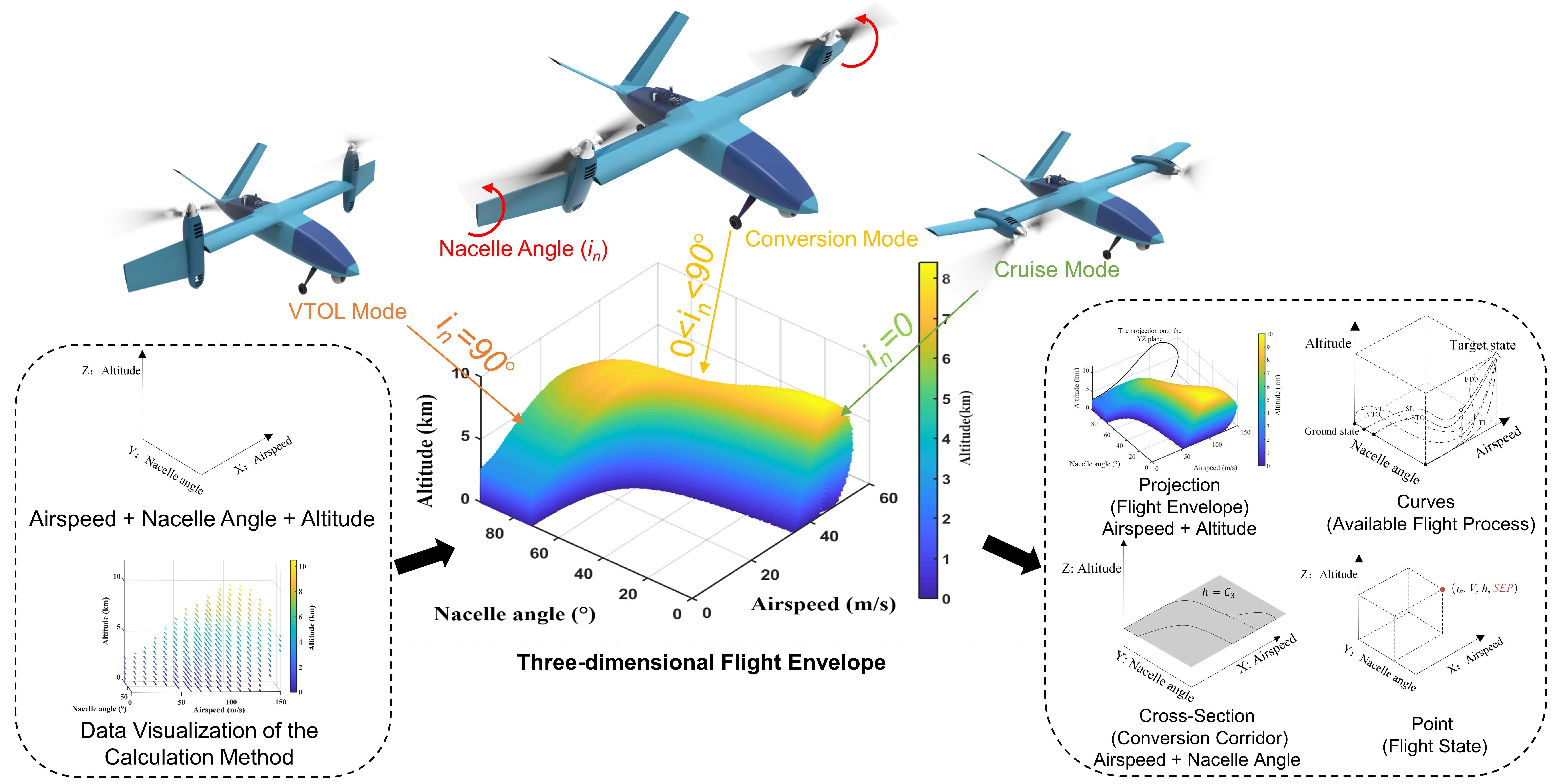
2.2. Coordinates Definitions of the 3D Flight Envelope
2.3. Points and Curves in the Graph of the 3D Flight Envelope
2.4. Cross-Sections and Projections in the Graph of the 3D Flight Envelope
3. Calculation Method of 3D Flight Envelope
4. Verification of 3D Envelope
5. Application on the Rotor-Wing
6. Conclusions and Future Work
- The explicit calculation method enhances the 3D envelope generating efficiency. A concise flowchart is introduced and could be applied to various kinds of V/STOL aircraft. The detailed parameters inside the envelope, for instance, the lift, drag, rated and required power, can be derived after the complete process. Researchers can obtain the conversion corridors at all altitudes, the flight envelope at all nacelle angles, and the altitudes matching different nacelle angles at all velocities in one calculation process;
- The 2D flight envelope and conversion corridor of XV-15 in the literature were used as the verification study of the projection and cross-section of the generated 3D envelope. Then, this was applied to a rotor-wing configuration to demonstrate its versatility. The results from the two case studies not only demonstrate its capability to intuitively present the comprehensive flight performance in a 3D envelope, which is extraordinarily redundant using the traditional 2D diagrams, but also reveal the determinant of the VTOL and cruise mode to performance boundary and massive potentials in the conversion model;
- The 3D flight envelope provides a performance evaluation method to the V/STOL flight profile. A safe and economical flight mission can be conveniently organized based on the 3D flight envelope superimposed by the safety-related parameters. The application in the case study also reflected the proposed 3D flight envelope, can help to support control strategy design, and determine the subject contents of wind tunnel and flight test.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Maximum airspeed of VTOL mode | |
| Stall airspeed of cruise mode | |
| Cessation airspeed of conversion mode | |
| Thrust | |
| Nacelle angle | |
| Angle of attack | |
| The angle between the thrust and nacelle axis | |
| Lift force | |
| Gravity force | |
| Drag force | |
| Specific excess power | |
| Altitude | |
| The power rating of the engine at an altitude of | |
| Required power | |
| Gravitational acceleration | |
| Airspeed | |
| Rating power at sea level | |
| Atmospheric pressure at an altitude of | |
| Atmospheric pressure at sea level | |
| The atmospheric temperature at sea level | |
| The atmospheric temperature at an altitude of | |
| Induced power | |
| Profile power | |
| Minimum profile power | |
| Parasitic power | |
| Climb power | |
| Airspeed component perpendicular to the rotor disc | |
| Airspeed component parallel to the rotor disc | |
| Rotational speed | |
| Ideal hover-induced velocity | |
| Power coefficient () | |
| Thrust coefficient () | |
| The ratio of airspeed component perpendicular to the rotor disc to ideal hover-induced velocity | |
| Empirical correction factor for disc | |
| The ratio of rotor-induced velocity to ideal hover-induced velocity | |
| Rotor solidity | |
| Drag coefficient of the blade | |
| Rotor advance ratio to drag | |
| Rotor advance ratio | |
| Number of rotors | |
| Transmission loss coefficient | |
| Atmospheric density at an altitude of | |
| Propeller radius | |
| Blade-tip velocity |
References
- Ye, L.; Zhang, Y.; Yang, S.; Zhu, X.; Dong, J. Numerical Simulation of Aerodynamic Interaction for a Tilt Rotor Aircraft in Helicopter Mode. Chin. J. Aeronaut. 2016, 29, 843–854. [Google Scholar] [CrossRef]
- Lightfoot, R. VTOL-1968. In Proceedings of the 5th Annual Meeting and Technical Display, American Institute of Aeronautics and Astronautic, Philadelphia, PA, USA, 21 October 1968. [Google Scholar] [CrossRef]
- Richardson, J.R.; Atkins, E.M.; Kabamba, P.T.; Girard, A.R. Envelopes for Flight Through Stochastic Gusts. J. Guid. Control Dyn. 2013, 36, 1464–1476. [Google Scholar] [CrossRef][Green Version]
- Sharma, P.; Ochoa, C.; Atkins, E. Sensor-Aware Flight Envelopes for Urban Air Mobility. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7 January 2019. [Google Scholar] [CrossRef]
- Anderson, J.D. Aircraft Performance and Design; WCB/McGraw-Hill: Boston, MA, USA, 1999; Volume 1, ISBN 978-0070019713. [Google Scholar]
- McClamroch, N.H. Steady Aircraft Flight and Performance; Princeton University Press: Princeton, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Raymer, D. Aircraft Design: A Conceptual Approach; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 2012. [Google Scholar] [CrossRef]
- Fu, J.; Huang, J.; Wang, L.; Song, L. Oscillation Mode Flight Data Analysis Based on FFT. Aircr. Eng. Aerosp. Technol. 2019, 91, 157–162. [Google Scholar] [CrossRef]
- Zhou, P.; Chen, R.; Yuan, Y.; Chi, C. Aerodynamic Interference on Trim Characteristics of Quad-Tiltrotor Aircraft. Aerospace 2022, 9, 262. [Google Scholar] [CrossRef]
- Fu, J.; Heerden, A.S.; Judt, D.; Lawson, C. A Generic Mission-Level Flight Control Surface EMA Power Consumption Simulation Tool. Aerospace 2022, 9, 290. [Google Scholar] [CrossRef]
- Wang, C.; Zhou, Z.; Wang, R. Research on Dynamic Modeling and Transition Flight Strategy of VTOL UAV. Appl. Sci. 2019, 9, 4937. [Google Scholar] [CrossRef]
- Rutherford, J.; Orourke, M.; Martin, C.; Lovenguth, M.; Mitchell, C. Technology Needs for High-Speed Rotorcraft. 1991. Available online: https://ntrs.nasa.gov/citations/19910013823 (accessed on 23 October 2022).
- Wu, Y.; Li, H.; Su, X. A Path Planning Model of a Tiltrotor for Approaching an Aircraft Carrier during Landing. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 235, 2392–2406. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, W.; Qu, X. A Trajectory Planning Model of Tiltrotor Considering Multi-Phase and Multi-Mode Flight. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 6019–6031. [Google Scholar] [CrossRef]
- Chang, S.; Bang, H.; Lee, W.; Park, B. Dynamic Modeling and Fuzzy Control for a Small Tiltrotor Unmanned Aerial Vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2013, 227, 1468–1487. [Google Scholar] [CrossRef]
- Choi, S.; Kang, Y.; Chang, S.; Koo, S.; Kim, J.M. Development and Conversion Flight Test of a Small Tiltrotor Unmanned Aerial Vehicle. J. Aircr. 2010, 47, 730–732. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, L.; Yang, S. Numerical Study on Flow Fields and Aerodynamics of Tilt Rotor Aircraft in Conversion Mode Based on Embedded Grid and Actuator Model. Chin. J. Aeronaut. 2015, 28, 93–102. [Google Scholar] [CrossRef]
- Abdallah, A.M. A New Concept for Three-Dimensional Aerodynamic Attitude Flight Envelope. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference; American Institute of Aeronautics and Astronautics, Atlanta, GA, USA, 25 June 2018. [Google Scholar] [CrossRef]
- Roberts, L.; Deckert, W.; Hickey, D. Recent Progress in V/STOL Aircraft Technology. 1981. Available online: https://ntrs.nasa.gov/citations/19810011538 (accessed on 23 October 2022).
- Holsten, J.; Ostermann, T.; Moormann, D. Design and Wind Tunnel Tests of a Tiltwing UAV. CEAS Aeronaut. J. 2011, 2, 69–79. [Google Scholar] [CrossRef]
- Liu, Z.; He, Y.; Yang, L.; Han, J. Control Techniques of Tilt Rotor Unmanned Aerial Vehicle Systems: A Review. Chin. J. Aeronaut. 2017, 30, 135–148. [Google Scholar] [CrossRef]
- Slavik, S.; Klesa, J.; Brabec, J. Propeller Selection by Means of Pareto-Optimal Sets Applied to Flight Performance. Aerospace 2020, 7, 21. [Google Scholar] [CrossRef]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.T.; Sirimoglu, E.; Unel, M.; Aksit, M.F. Design and Construction of a Novel Quad Tilt-Wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Valavanis, K.P.; Vachtsevanos, G.J. Handbook of Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2015; Volume 1, ISBN 978-90-481-9707-1. [Google Scholar]
- Wang, C.; Zhou, Z.; Wang, R.; Ding, Y. Study on Ducted Vertical Take-Off and Landing Fixed-Wing UAV Dynamics Modeling and Transition Corridor. Appl. Sci. 2021, 11, 10422. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, R. Investigation on Nacelle Conversion Envelope Analysis Method of Tiltrotor Aircraft. J. Aerosp. Power 2011, 26, 2174–2180. Available online: https://perma.cc/3TTT-PMS4 (accessed on 15 July 2022).
- Johnson, W. Helicopter Theory; Dover Publications Inc.: Mineola, NY, USA, 2012; ISBN 978-0-486-68230-3. [Google Scholar]
- Carlson, E.; Zhao, Y.; Chen, R. Optimal Tiltrotor Runway Operations in One Engine Inoperative. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit; American Institute of Aeronautics and Astronautics: Portland, OR, USA, 9 August 1999. [Google Scholar] [CrossRef]
- Maisel, M.D. The History of the XV-15 Tilt Rotor Research Aircraft: From Concept to Flight; National Aeronautics and Space Administration, Office of Policy and Plans: Washington, DC, USA, 2000. Available online: https://history.nasa.gov/monograph17.pdf (accessed on 23 October 2022).
- Kleinhesselink, K.M. Stability and Control Modeling of the Tiltrotor Aircraft. 2007. Available online: https://hdl.handle.net/1903/7016 (accessed on 23 October 2022).
- Klein, G.D. Linear Modeling of Tiltrotor Aircraft (In Helicopter and Airplane Modes) for Stability Analysis and Preliminary Design; Naval Postgraduate School: Monterey, CA, USA, 1996; Available online: https://hdl.handle.net/10945/32094 (accessed on 23 October 2022).
- Brown, J.H.; Edenborough, H.K.; Few, D.D. XV-15 Tilt Rotor Test Progress Report; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1977. [Google Scholar] [CrossRef]
- Hwang, S.-J.; Kim, Y.-S.; Lee, M.-K. Tilt Rotor-Wing Concept for Multi-Purpose VTOL UAV. Int. J. Aeronaut. Space Sci. 2007, 8, 87–94. [Google Scholar] [CrossRef]
- Oishi, M.; Tomlin, C. Switched Nonlinear Control of a VSTOL Aircraft. In Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No.99CH36304), Phoenix, AZ, USA, 7–10 December 1999; Volume 3, pp. 2685–2690. [Google Scholar] [CrossRef]
- Ma, T.; Zhang, Z.; Liu, Z.; Wang, X.; Shuai, H. Effect of Rotor Slipstream of Tiltrotor Aircraft in Cruise Mode. J. Beijing Univ. Aeronaut. Astronaut. 2021, 45, 1124–1137. [Google Scholar] [CrossRef]
- Zong, J.; Zhu, B.; Hou, Z.; Yang, X.; Zhai, J. Evaluation and Comparison of Hybrid Wing VTOL UAV with Four Different Electric Propulsion Systems. Aerospace 2021, 8, 256. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Explanation |
|---|---|
| VTO | Vertical take-off |
| STO | Short take-off |
| FTO | Fixed-wing take-off |
| VL | Vertical landing |
| SL | Short landing |
| FL | Fixed-wing landing |
| Categories of the Parameters | Definitions |
|---|---|
| Flight conditions | AOA, altitude, airspeed |
| Aerodynamics | Density, lift, drag |
| Performance | Required power, thrust, nacelle angle, SEP |
| Constraints | Engine power rating > required power |
| Outputs | Altitude, airspeed, nacelle angle, SEP |
| Specifications | Value |
|---|---|
| Rated power of the two engines | 1737.5 kW |
| Wing area | 15.7 m2 |
| Proprotor number | 2 |
| Proprotor diameter | 7.62 m |
| Proprotor solidity | 0.089 |
| Rotational speed | 589 rpm |
| Design weight | 5897 kg |
| Nacelle angle | 0° to 95° |
| α | −20° to 13° |
| α1 | −5° to 5° |
| Specifications | Values |
|---|---|
| Engine rating power | 15 kW (each) |
| Wing area | 1.18 m2 |
| Proprotor number | 2 |
| Proprotor diameter | 1.4 m |
| Proprotor solidity | 0.07 |
| Revolutions per minute | 2100 |
| Take-off weight | 70 kg |
| Nacelle angle range | 0° to 95° |
| α | −90° to 13° |
| α1 | −5°to 5° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, T.; Wang, X.; Fu, J.; Hao, S.; Xue, P. Three-Dimensional Flight Envelope for V/STOL Aircraft with Multiple Flight Modes. Aerospace 2022, 9, 691. https://doi.org/10.3390/aerospace9110691
Ma T, Wang X, Fu J, Hao S, Xue P. Three-Dimensional Flight Envelope for V/STOL Aircraft with Multiple Flight Modes. Aerospace. 2022; 9(11):691. https://doi.org/10.3390/aerospace9110691
Chicago/Turabian StyleMa, Tielin, Xiangsheng Wang, Jingcheng Fu, Shuai Hao, and Pu Xue. 2022. "Three-Dimensional Flight Envelope for V/STOL Aircraft with Multiple Flight Modes" Aerospace 9, no. 11: 691. https://doi.org/10.3390/aerospace9110691
APA StyleMa, T., Wang, X., Fu, J., Hao, S., & Xue, P. (2022). Three-Dimensional Flight Envelope for V/STOL Aircraft with Multiple Flight Modes. Aerospace, 9(11), 691. https://doi.org/10.3390/aerospace9110691