
Overall Parameters Design of Air-Launched Rockets Using Surrogate Based Optimization Method


Abstract
:1. Introduction
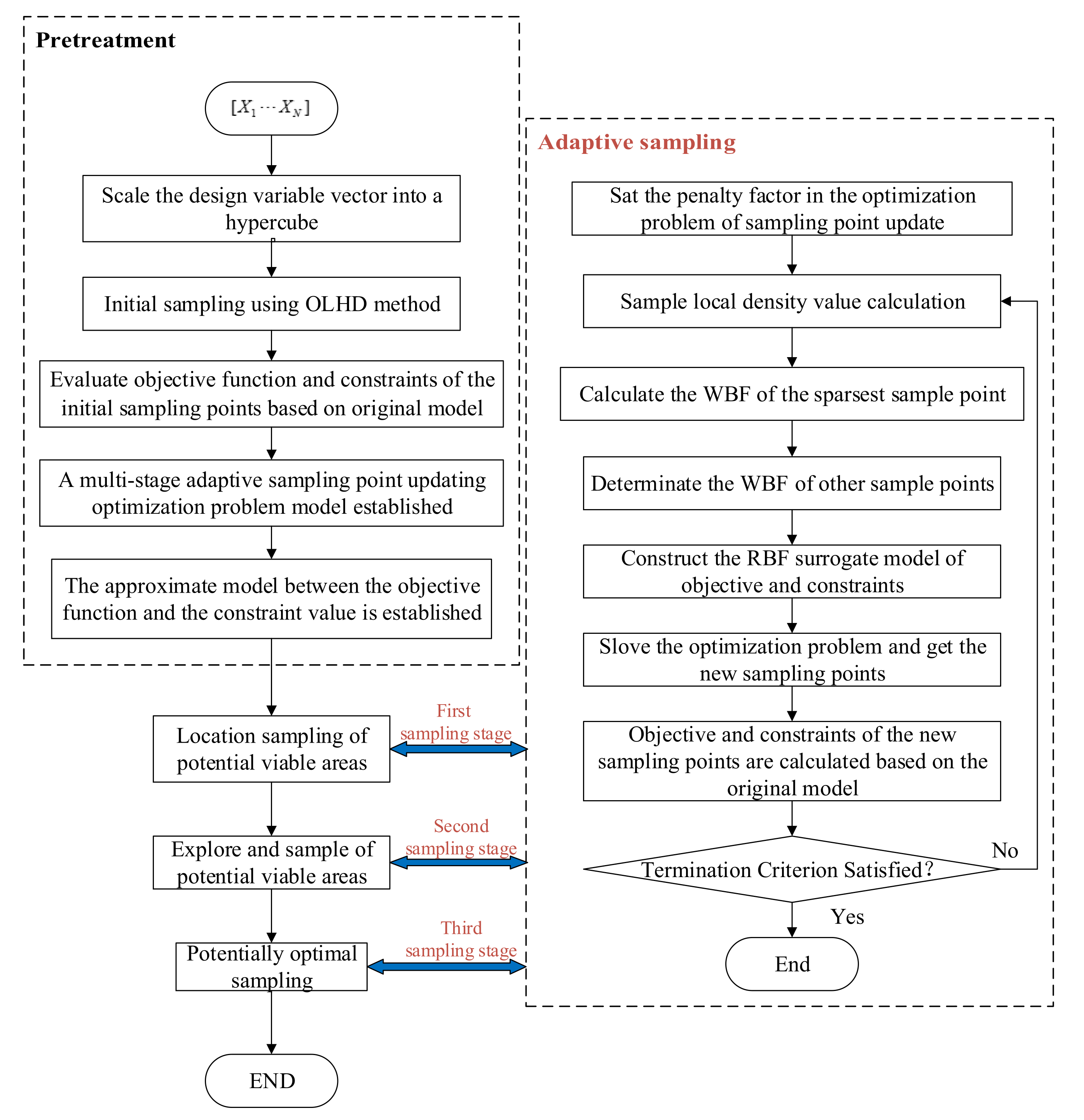
2. Multi-Stage Adaptive Sampling Point Updating Method
2.1. Analysis of Sampling Point Updating Method
2.2. Multi-Stage Adaptive Sampling Point Updating Method Model
- (1)
- The optimization problem of the multi-stage adaptive sampling points updating method is established. The known optimization problems are as follows:
- (2)
- Establish the accuracy evaluation model of the surrogate model of the objective function and the constraint value relative to the original model
- (3)
- First sampling stage—Location sampling of potential feasible region
- (4)
- Second sampling stage—potential feasible region exploration sampling
- (5)
- Third sampling stage—potentially optimal sampling
2.3. The Proof of Global Optimal
2.4. Features of Method
- This method realizes the adaptive adjustment of the distance between the new sampling points and the existing sample points, which can ensure that the distance constraint value is always within a reasonable range in the process of updating the sampling points.
- This method makes each stage of sampling have a unified form and adjusts the exploration and development ability of the surrogate-based optimization method by changing the penalty factor, which can realize the sampling purpose of different stages.
- Based on the approximate model of the objective function and the constraint value, the convergence end criterion of each sampling stage is established, which is conducive to terminating the sampling update after a reasonable number of samples and achieving the purpose of improving the optimization efficiency.
- Decision science, convenient operation, clearly defined objective and process controllability are the salient characteristics of this method, which ensures the reliability and global optimality of the surrogate-based optimization method, with good convergence efficiency.
3. Improve Surrogate-Based Optimization Method
- (1)
- Initialization stage
- (2)
- The approximate stage
- (3)
- The convergence criterion
- (4)
- The updating stage of sampling points
4. Mathematical Modeling and Verification of Overall Parameters
4.1. 3-DOF Trajectory Simulation Model
4.2. Mass Calculation Model
4.3. Thrust Calculation Model
4.4. Aerodynamic Calculation Model
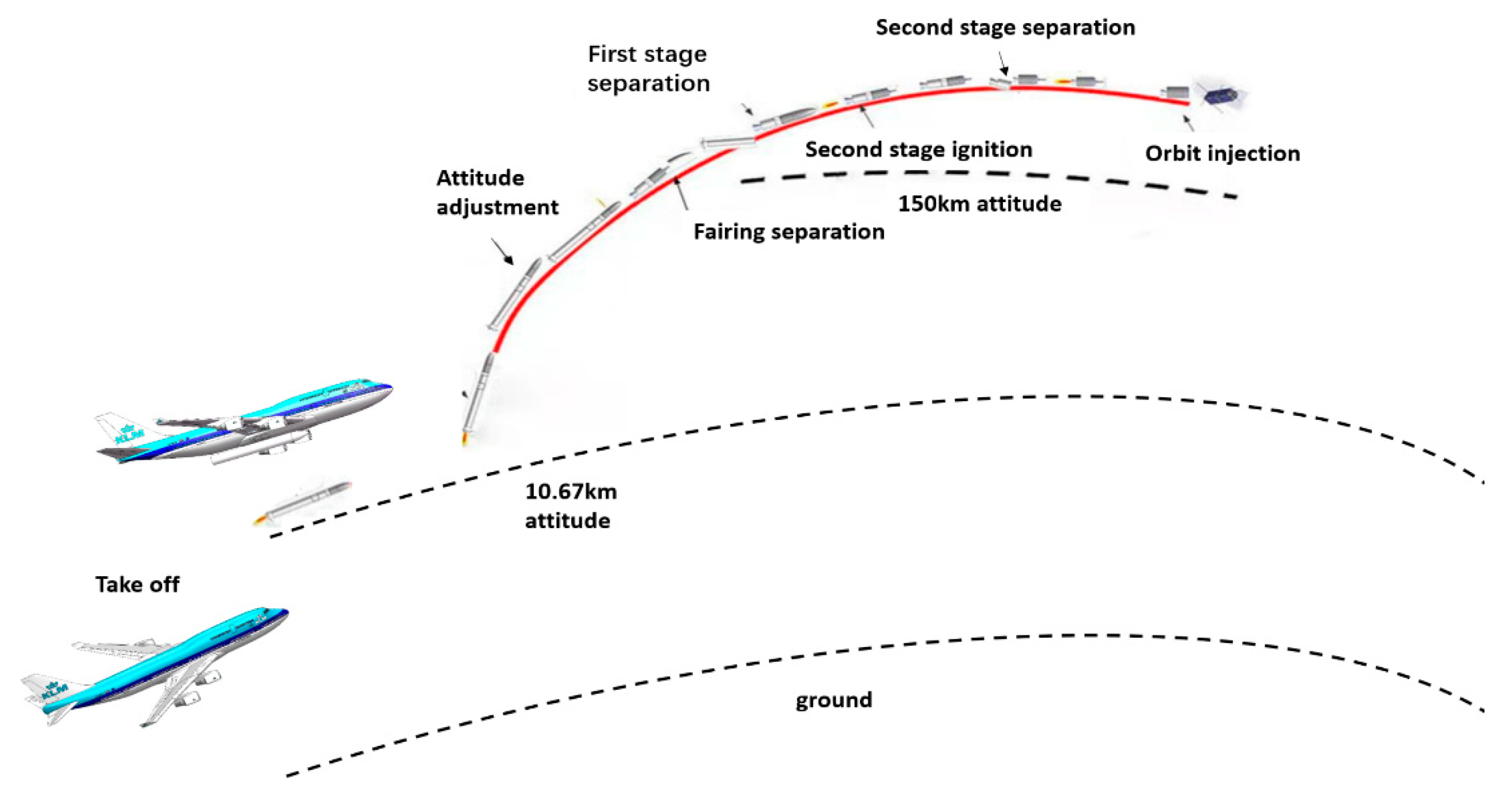
4.5. Flight Program Design
- (1)
- The take-off stage of the carrier aircraft.
- (2)
- Separation and launch stage of rocket and carrier aircraft: When the carrier aircraft flew to an altitude of nearly 11 km and the speed reached 262 m/s, it was pulled up at an angle of more than 25 degrees to release the rocket suspended under the aircraft.
- (3)
- Primary power stage: After the rocket was separated from the carrier aircraft for 5 s, the first-stage motor was ignited, and the working time was about 3 min.
- (4)
- Primary glide stage: After gliding for a certain period, the first stage motor was separated.
- (5)
- Secondary power stage: After the separation of the primary engine, the secondary motor ignited, the operation time was about 6 min and after 20 s of operation, the rocket cowling separated.
- (6)
- Secondary sliding stage: After the second stage motor was shut down, the rocket will run for about 22 min without power.
- (7)
- The final push stage: The second stage motor was ignited again for about 15 s.
- (1)
- Aircraft and rocket separation stage
- (2)
- First stage flight
- (3)
- Secondary and tertiary flight stage
- (4)
- Final boost stage
5. Establish the Overall Optimization Problem Model
5.1. Design Variables
5.2. Objective Function
5.3. Constraint Conditions
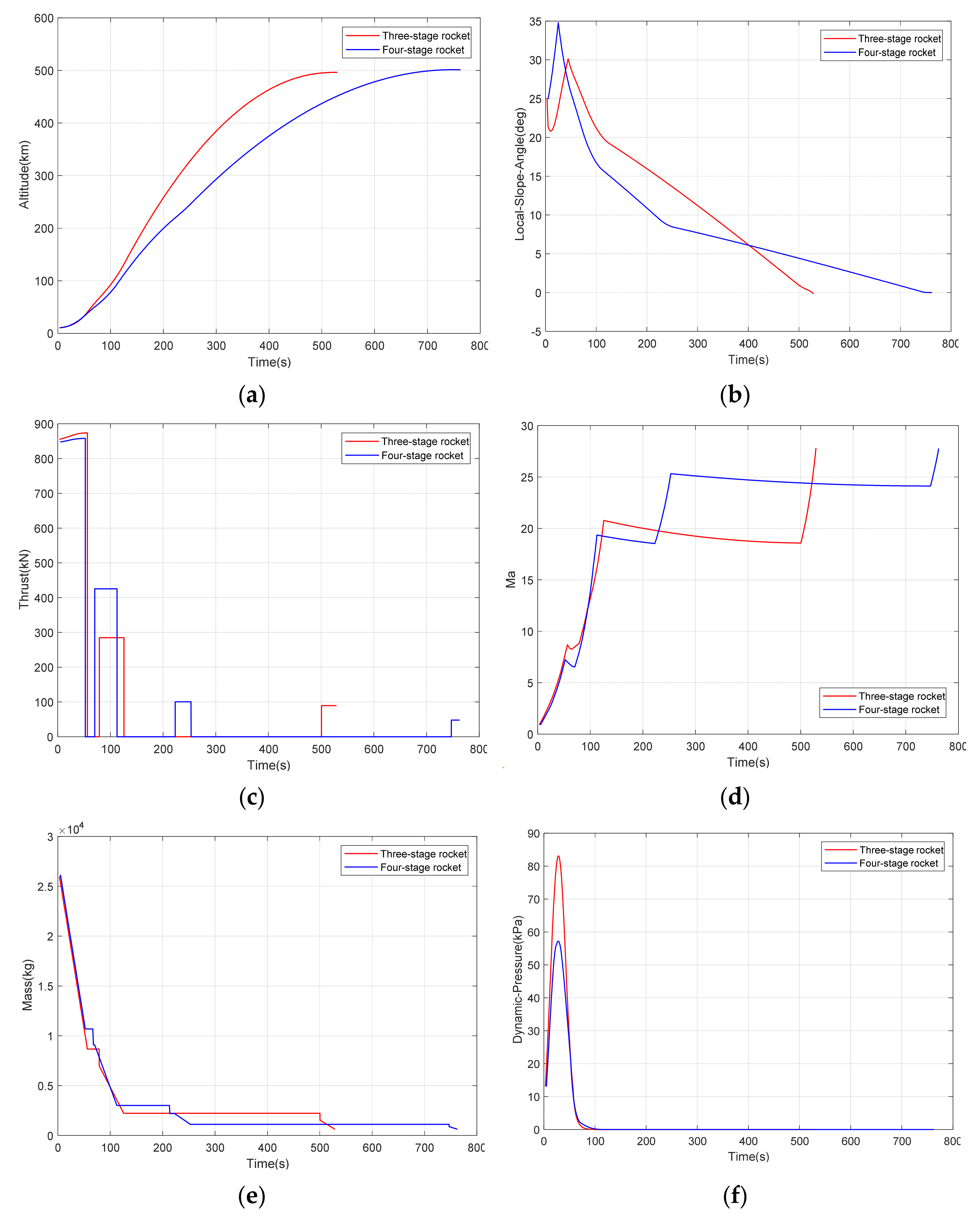
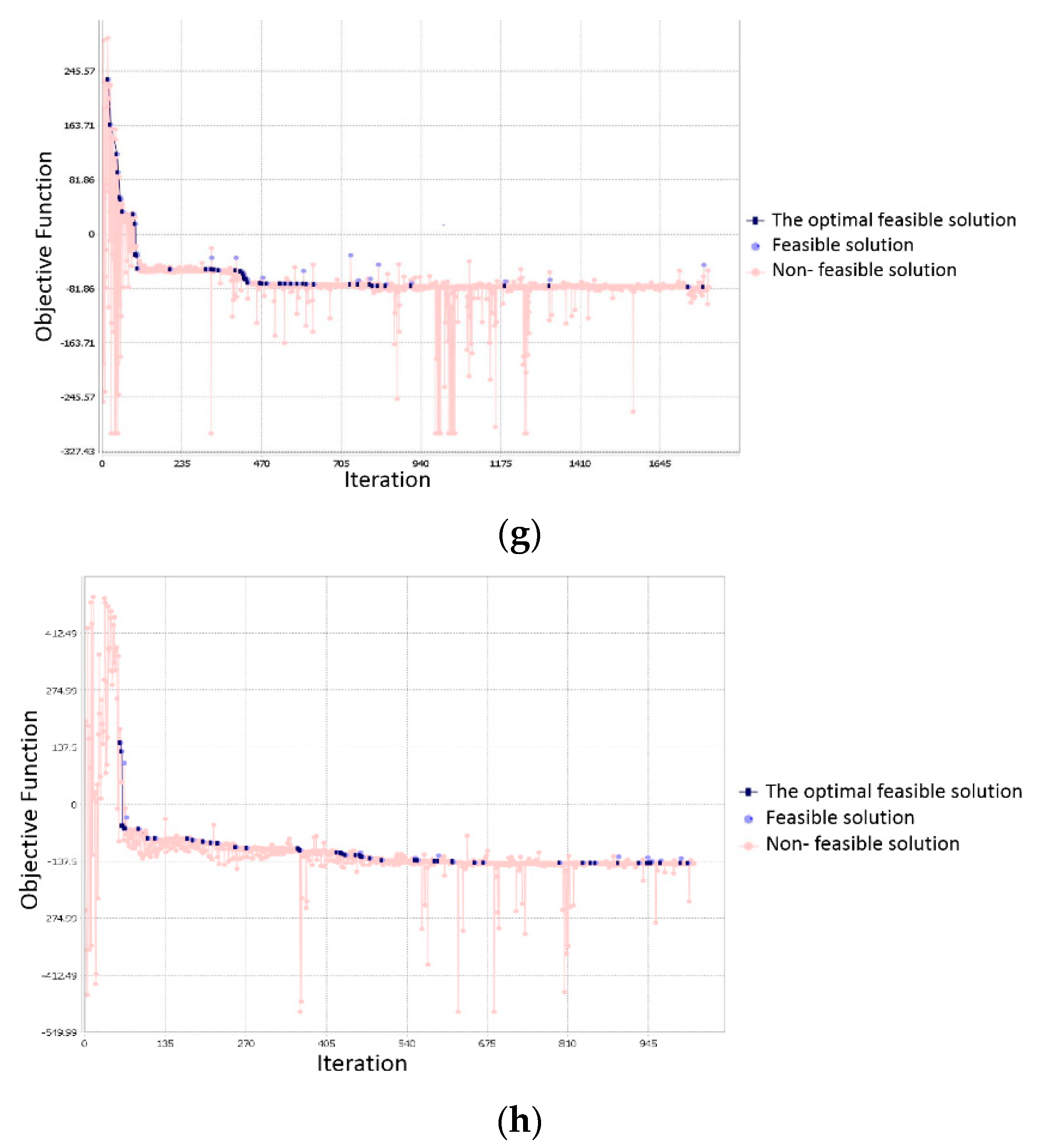
6. Optimization Results and Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sarigul-Klijn, N.; Sarigul-Klijn, M. A comparative analysis of methods for air-launching vehicles from earth to sub-orbit or orbit. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2006, 220, 439–452. [Google Scholar] [CrossRef]
- Song, W.; Ai, B.; Zhao, X. Prediction and evaluation of the stage-separation compatibility of an internally carried air-launch vehicle. Aerosp. Sci. Technol. 2020, 105, 106001. [Google Scholar] [CrossRef]
- Donahue, B.B. Beating the Rocket Equation: Air Launch with Advanced Chemical Propulsion. J. Spacecr. Rocket. 2004, 41, 302–309. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, Y. Multidisciplinary design and optimization of an innovative nano air launch vehicle with a twin-fuselage UAV as carrier aircraft. Acta Astronaut. 2020, 170, 397–411. [Google Scholar] [CrossRef]
- Jiu Xing, Z.; Haojun, X.; Dengcheng, Z.; Yanhua, Z. Study on conditions of internally carried air-launched launch vehicles based on the virtual prototype technology. High Tech. Commun. 2014, 20, 166–172. [Google Scholar]
- Changjun, P.; Yingqing, G. Design and simulation of ex-range gliding wing of high altitude air-launched autonomous underwater vehicles based on SIMULINK. J. Aeronaut. China 2013, 26, 319–325. [Google Scholar]
- Ryan, J. Genetic Algorithms in Search, Optimization and Machine Learning (Book Review). ORSA J. Comput. 1991, 3, 176. [Google Scholar] [CrossRef]
- Wang, D.; Wu, Z.; Fei, Y.; Zhang, W. Structural design employing a sequential approximation optimization approach. Comput. Struct. 2014, 134, 75–87. [Google Scholar] [CrossRef]
- Hayward, K.; Urdiales, J.M.L. Small Satellite Launch Vehicle from a Balloon Platform. In Proceedings of the 13th Reinventing Space Conference; Springer: Berlin/Heidelberg, Germany, 2018; pp. 177–192. [Google Scholar]
- Linshu, H.; Rafique, A.F.; Rahman, T. (Eds.) Small launch vehicle trajectory profile optimization using hybrid algorithm. In Proceedings of the 2013 10th International Bhurban Conference on Applied Sciences & Technology (IBCAST), Islamabad, Islamabad, Pakistan, 15–19 January 2013. [Google Scholar]
- Bayley, D.J.; Hartfield, R.J., Jr.; Burkhalter, J.E.; Jenkins, R.M. Design Optimization of a Space Launch Vehicle Using a Genetic Algorithm. J. Spacecr. Rocket. 2008, 45, 733–740. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. (Eds.) Particle swarm optimization. In IEEE International Conference on Neural Networks; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 1995. [Google Scholar]
- Yıldız, A.R. An effective hybrid immune-hill climbing optimization approach for solving design and manufacturing optimization problems in industry. J. Mater. Process. Technol. 2009, 209, 2773–2780. [Google Scholar] [CrossRef]
- Rafique, A.F.; He, L.S.; Zeeshan, Q.; Kamran, A.; Nisar, K. Multidisciplinary design and optimization of an air launched satellite launch vehicle using a hybrid heuristic search algorithm. Eng. Optim. 2011, 43, 305–328. [Google Scholar] [CrossRef]
- Rafique, A.; He, L.; Kamran, A.; Zeeshan, Q. Multidisciplinary design of air launched satellite launch vehicle: Performance comparison of heuristic optimization methods. Acta Astronautica. 2010, 67, 826–844. [Google Scholar] [CrossRef]
- Qifeng, C.; Xiaobin, L.; Jinhai, D. Cooperative coevolutionary multidisciplinary design optimization of missile system. J. Natl. Univ. Def. Technol. 2001, 23, 9–12. [Google Scholar]
- Fei, Z.; Quanbin, R.; Jun, Y. Air-to-ground missile conceptual design based on multidisciplinary design optimization. J. Solid Rocket. Technol. 2013, 36, 149–154. [Google Scholar]
- Wei, Z.; Jianjun, L.; Hongfu, Q.; Fei, X. Variable weight TOPSIS evaluation combined with particle swarm method for missile overall parameters optimization design. J. Solid Rocket. Technol. 2018, 41, 388–394. [Google Scholar]
- Jiao, X.; Chang, J.; Wang, Z.; Yu, D. Hysteresis phenomenon of hypersonic inlet at high Mach number. Acta Astronautica. 2016, 128, 657–668. [Google Scholar] [CrossRef]
- Luo, J.; Lu, W. Comparison of surrogate models with different methods in groundwater remediation process. J. Earth Syst. Sci. 2014, 123, 1579–1589. [Google Scholar] [CrossRef]
- Feng, F.; Jin, J.; Liu, W.; Yan, S. Recent Advances in Multi-Feature Assisted Neuro-Transfer Function Surrogate Based EM Optimization for Microwave Filter Design. In Proceedings of the 13th UK-Europe-China Workshop on Millimetre-Waves and Terahertz Technologies (UCMMT), Tianjin, China, 29 August–1 September 2020. [Google Scholar]
- Namura, N.; Shimoyama, K.; Obayashi, S. Kriging Surrogate Model Enhanced by Coordinate Transformation of Design Space Based on Eigenvalue Decomposition. In Evolutionary Multi-Criterion Optimization; Springer Natural: Guimarães, Portugal, 2015; Volume 9018, pp. 321–335. [Google Scholar]
- Mifsud, M.; MacManus, D.; Shaw, S. A variable-fidelity aerodynamic model using proper orthogonal decomposition. Int. J. Numer. Methods Fluids 2016, 82, 646–663. [Google Scholar] [CrossRef] [Green Version]
- Masters, D.A.; Taylor, N.J.; Rendall, T.C.S.; Allen, C.B.; Poole, D.J. Geometric Comparison of Aerofoil Shape Parameterization Methods. AIAA J. 2017, 55, 1575–1589. [Google Scholar] [CrossRef] [Green Version]
- Farias Filho, U.P.; Antunes, A.R.; Bastos, S.M.; Lyra, P.R. Minimization of vortex induced vibrations using Surrogate Based Optimization. Struct. Multidiscip. Optim. 2015, 52, 717–735. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, D.; Jiang, Z.; Zhang, W. Unified estimate of Gaussian kernel width for surrogate models. Neurocomputing 2016, 203, 41–51. [Google Scholar] [CrossRef]
- Wu, Z.; Donghui, W.; Weihua, Z.; Yang, F. Modeling design framework for sold-rocketmotor performance. J. Spacecr. Rocket. 2017, 54, 1–10. [Google Scholar]
- Yeh, I.C.; Chen, C.C.; Zhang, X.; Wu, C.; Huang, K.C. Adaptive radial basis function networks with kernel shape parameters(Article). Neural Comput. Appl. 2012, 21, 469–480. [Google Scholar] [CrossRef]
- Xu, P.; Jayawardena, A.W.; Li, W.K. Model selection for RBF network via generalized degree of freedom. Neurocomputing 2013, 99, 163–171. [Google Scholar] [CrossRef]
- Kejun, C.; Luhua, L.; Yunhe, M. Launch Vehicle Flight Dynamics and Guidance; National Defense Industry Press: Beijing, China, 2014. [Google Scholar]
- Xingjian, L. Introduction to Missile Overall Design; National Defense Industry Press: Beijing, China, 2017. [Google Scholar]
- Yao, Z.; Yongzhi, S.; Xiangdong, L. Sliding mode control based guidance law with impact angle constraint. J. Aeronaut. China 2014, 27, 145–152. [Google Scholar]
- Rhee, I.; Lee, C.; Lee, J.-W. Optimal design for hybrid rocket engine for air launch vehicle. J. Mech. Sci. Technol. 2008, 22, 1576–1585. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Overall Parameters | Three Stage Case | Four Stage Case |
|---|---|---|
| Engine specific impulse | Isp1 = 2450/Isp2 = 2800 Isp3 = 2800 (m/s) | Isp1 = 2500/Isp2 = 2800 Isp3 = 2800/Isp4 = 2800 (m/s) |
| Average thrust | T1 = 800/T2 = 123 T3 = 18 (KN) | T1 = 800/T2 = 450 T3 = 120/T4 = 18 (KN) |
| Propellant mass ratio | 1st: 0.93/2nd: 0.92 3rd: 0.89 | 1st: 0.93/2nd: 0.92 3rd: 0.89/4th: 0.85 |
| Target orbit | 500 km SSO | |
| Launch altitude | 10.67 km | |
| Initial velocity | 262 m/s | |
| Launch velocity inclination | 25° | |
| Takeoff weight | 25.85 t | |
| Payload mass | 300 kg | |
| Total length | 21.34 m | |
| OptimizationParameters | Three Stage Case | Four Stage Case | ||
|---|---|---|---|---|
| Lower Limit | Upper Limit | Lower Limit | Upper Limit | |
| [kN] | 600 | 1000 | 800 | 1200 |
| [s] | 40 | 60 | 40 | 80 |
| [kN] | 50 | 500 | 400 | 800 |
| [s] | 30 | 55 | 30 | 60 |
| [kN] | 18 | 100 | 100 | 300 |
| [s] | 10 | 30 | 20 | 40 |
| [kN] | - | - | 20 | 40 |
| [s] | - | - | 10 | 35 |
| [deg] | 0 | 360 | 0 | 360 |
| [s] | 15 | 30 | 15 | 30 |
| [s] | 200 | 500 | 100 | 300 |
| [s] | - | - | 200 | 500 |
| [kg] | −300 | 300 | −500 | 500 |
| [s] | 5 | 40 | 20 | 50 |
| [deg] | 0.5 | 20 | 0.5 | 20 |
| OptimizationParameters | Three Stage Case | Four Stage Case |
|---|---|---|
| Optimal Value | Optimal Value | |
| [kN] | 794.617074 | 813.664624 |
| [s] | 53.410056 | 47.424124 |
| [kN] | 284.595899. | 401.457443 |
| [s] | 46.643218 | 42.36406 |
| [kN] | 89.507796 | 100.624851 |
| [s] | 28.673153 | 30.172789 |
| [kN] | - | 47.877072 |
| [s] | - | 15.68719 |
| [s] | 22.601925 | 15.065491 |
| [s] | 374.839673 | 101.180624 |
| [s] | - | 493.841631 |
| [s] | 39.537509 | 20.184363 |
| [deg] | 11.026007 | 17.251306 |
| [kg] | –79.350496 | –141.483212 |
| Variable | [kN] | [s] | [kN] | ||||
| Optimal Value | 807.22946 | 44.927365 | 404.372522 | 37.128915 | 160.164 | 48.972315 | 26.723819 |
| Variable | [s] | [s] | [s] | [s] | [s] | [deg] | [kg] |
| Optimal Value | 29.87172 | 23.460917 | 27.282389 | 496.452932 | 41.240957 | –1.790402 | 13.71289 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, S.; Li, J.; Zhang, S.; Bai, X.; Sui, D. Overall Parameters Design of Air-Launched Rockets Using Surrogate Based Optimization Method. Aerospace 2022, 9, 15. https://doi.org/10.3390/aerospace9010015
Cui S, Li J, Zhang S, Bai X, Sui D. Overall Parameters Design of Air-Launched Rockets Using Surrogate Based Optimization Method. Aerospace. 2022; 9(1):15. https://doi.org/10.3390/aerospace9010015
Chicago/Turabian StyleCui, Shenghui, Jiaxin Li, Shifeng Zhang, Xibin Bai, and Dongming Sui. 2022. "Overall Parameters Design of Air-Launched Rockets Using Surrogate Based Optimization Method" Aerospace 9, no. 1: 15. https://doi.org/10.3390/aerospace9010015
APA StyleCui, S., Li, J., Zhang, S., Bai, X., & Sui, D. (2022). Overall Parameters Design of Air-Launched Rockets Using Surrogate Based Optimization Method. Aerospace, 9(1), 15. https://doi.org/10.3390/aerospace9010015