
Design of the Electronic Engine Control Unit Performance Test System of Aircraft



Abstract
1. Introduction
2. Engine Model
2.1. Target Engine
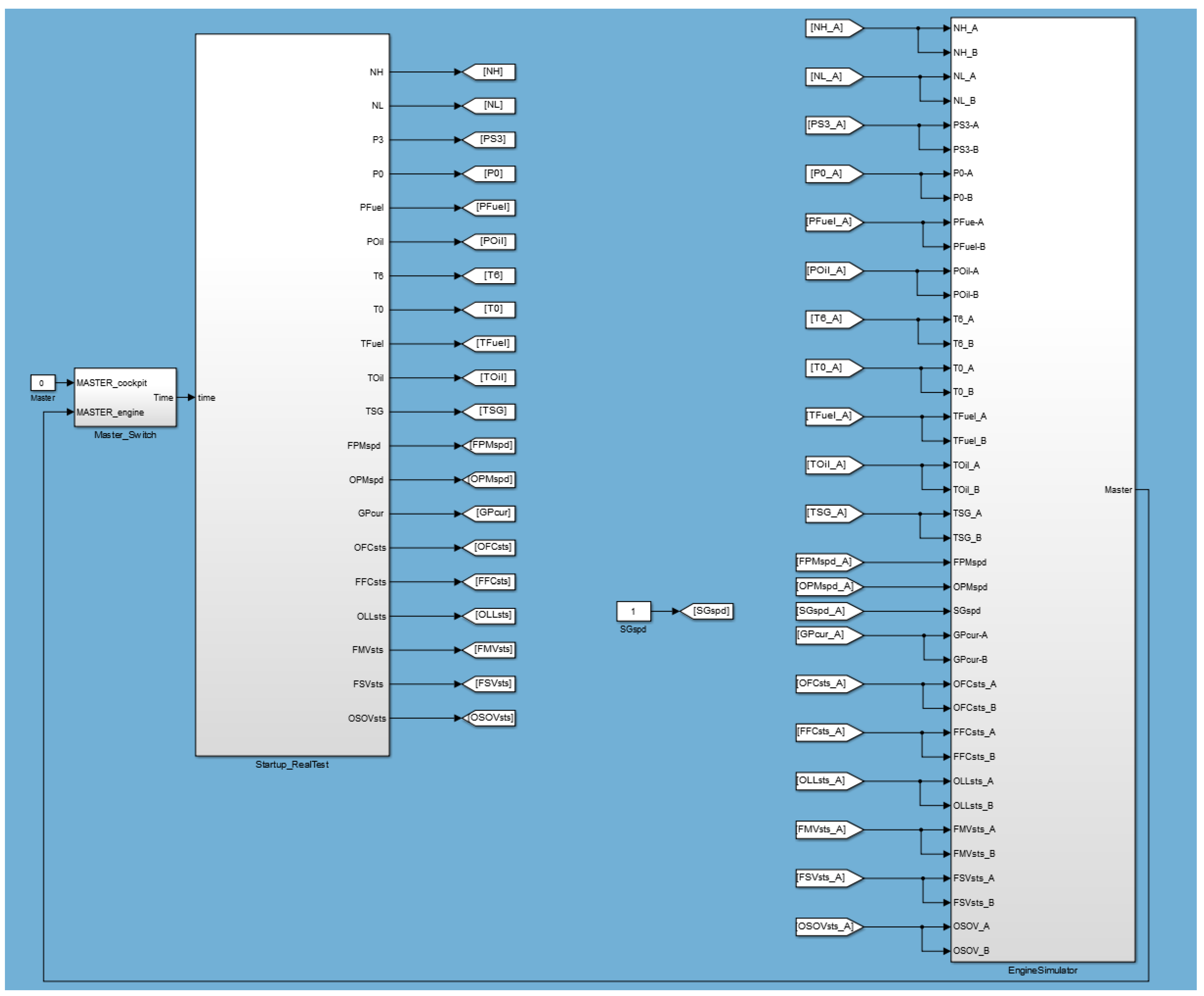
2.2. Real-Time Startup Phase Engine Modeling
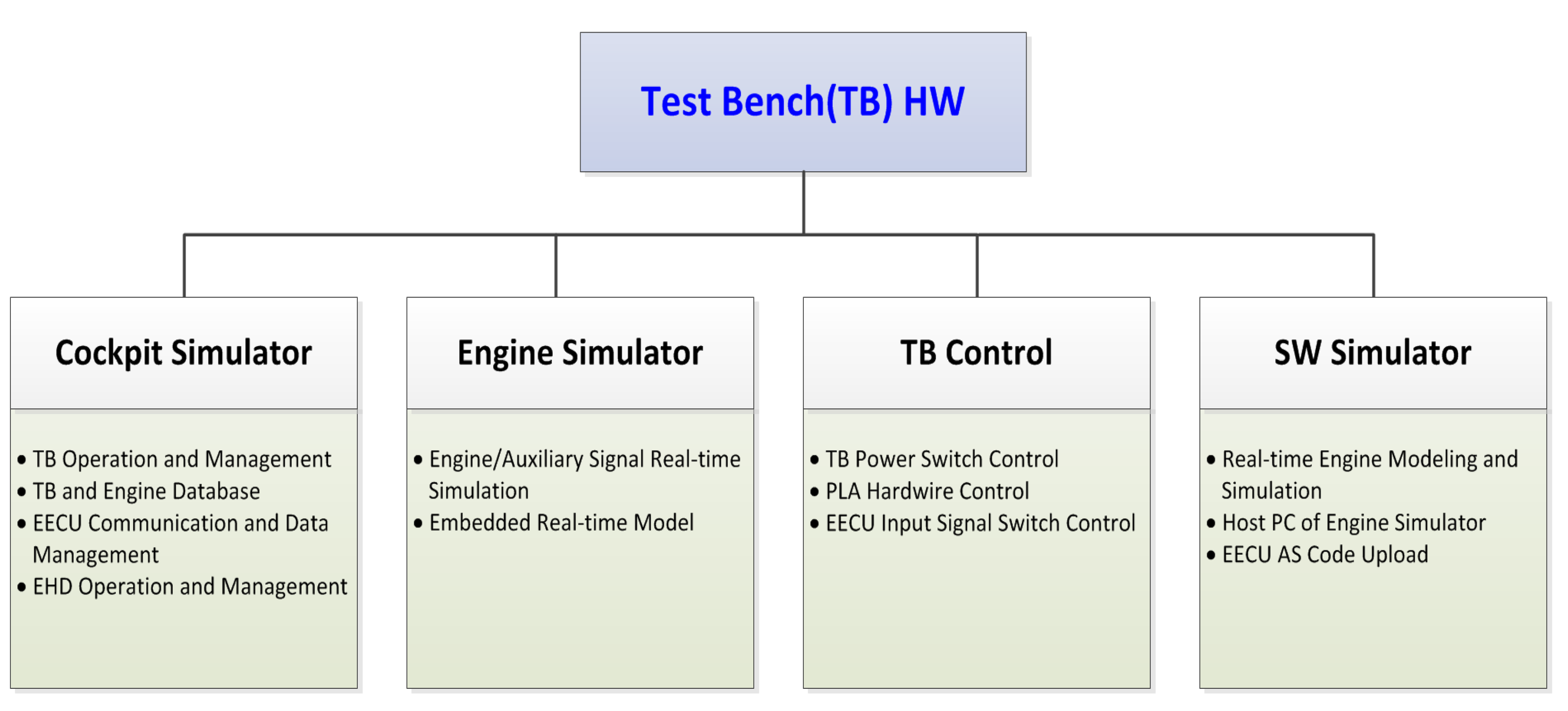
3. Test Bench Development
4. EECU Verification Test
4.1. Functional Test of Test Bench
4.2. EECU Interface and Interworking Test
4.3. Real-Time Engine Model Verification Test
4.4. Startup Phase Control Logic Verification Test
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| EECU | electronic engine control unit |
| ρ | density |
| t | time |
| ν | volume |
| LHV | fuel calorific value |
| DPcold | cold loss of combustor |
| DPhot | heat loss of combustor |
| Kcold | cold loss value |
| Khot | heat loss value |
| RRF | ram recovery coefficient |
| RTD | resistance temperature diode |
| PTC | positive temperature coefficient thermistor |
| EHD | engine health diagnostic |
| GUI | graphical user interface |
| EECU | electronic engine control units |
| P | pressure |
| NL (t) | the number of revolutions of low pressure at time t |
| B | operating point |
References
- Lobo, L.M.; Dufour, C.; Mahseredjian, J. Real-time simulation of more-electric aircraft power sytems. In Proceedings of the EPE’13 ECCE Europe Conference, Lille, France, 3–5 September 2013; pp. 1–10. [Google Scholar]
- Davies, W.J.; Hoelzer, C.A.; Vizzini, R.W. F-14 aircraft and propulsion control integration evaluation. J. Eng. Power 1983, 105, 663–668. [Google Scholar] [CrossRef]
- Yamane, H.; Takahara, Y.; Oyobe, T. Aspects of aircraft engine control systems R&D. Control Eng. Pract. 1997, 5, 595–602. [Google Scholar]
- Schwamm, F. FADEC computer systems for safety critical application. In Proceedings of the ASME the 1998 International Gas Turbine & Aeroengine Congress & Exhibition, Stockholm, Sweden, 2–5 June 1998; pp. 1–8. [Google Scholar]
- Hjelmgren, K.; Svensson, S.; Hannius, O. Reliability analysis of a single-engine aircraft FADEC. In Proceedings of the IEEE Reliability and Maintainability Symposium, Anaheim, CA, USA, 19–22 January 1998; pp. 401–407. [Google Scholar]
- Ito, K.; Nakagawa, T. Optimal self-diagnosis policy for FADEC of gas turbine engines. Math. Comput. Model. 2003, 38, 1243–1248. [Google Scholar] [CrossRef]
- Ding, S.; Qiu, T.; Liu, X.; Zhang, S. FHA method for VBV position control function of FADEC system based on aero-engine dynamic model. Procedia Eng. 2011, 17, 567–579. [Google Scholar]
- Pogorelov, G.I.; Kulikov, G.G.; Abdulnagimov, A.I.; Badamshin, B.I. Application of neural network technology and high-performance computing for identification and real-time hardware-in-the-loop simulation of gas turbine engines. Procedia Eng. 2017, 176, 402–408. [Google Scholar] [CrossRef]
- Choi, K.; Jang, S.-A.; Choi, K.; Eom, J.S.; Lee, B.S.; Son, Y.C.; Ryu, H. Development of an integrated high fidelity helicopter and engine simulation for control system design. J. Korean Soc. Aeronaut. Space Sci. 2010, 38, 249–257. [Google Scholar]
- Lee, K.-Y.; Han, S.-H.; Jin, Y.-K.; Lee, S.-J.; Kim, K.-S. A study on certification of electronic engine controls. J. Korean Soc. Aeronaut. Space Sci. 2005, 33, 104–109. [Google Scholar]
- Jung, J.-H.; Lee, S.-H.; Park, S.-W.; Jeong, I.-M.; Lee, S.-B. T-50 engine airstart test. J. Korean Soc. Aeronaut. Space Sci. 2006, 34, 90–95. [Google Scholar]
- Lu, F.; Braun, E. Rotating detonation wave propulsion: Experimental challenges, modeling, and engine concepts. J. Propuls. Power 2014, 30, 1125–1142. [Google Scholar] [CrossRef]
- Jafari, S.; Nikolaidis, T. Meta-heuristic global optimization algorithms for aircraft engines modelling and controller design; a review, research challenges, and exploring the future. Prog. Aerosp. Sci. 2019, 104, 40–53. [Google Scholar] [CrossRef]
- Jafari, S.; Fashandi, S.A.M.; Nikolaidis, T. Modeling and control of the starter motor and start-up phase for gas turbines. Electronics 2019, 8, 363. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Fashandi, S.A.M. Bond graph modeling of a jet engine with electric starter. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2019, 233, 3193–3210. [Google Scholar] [CrossRef]
- Imani, A.; Montazeri-Gh, M. A multi-loop switching controller for aircraft gas turbine engine with stability proof. Int. J. Control Autom. Syst. 2019, 17, 1359–1368. [Google Scholar] [CrossRef]
- Salehi, A.; Montazeri-Gh, M. Hardware-in-the-loop simulation of fuel control actuator of a turboshaft gas turbine engine. Proc. Inst. Mech. Eng. M 2019, 233, 969–977. [Google Scholar] [CrossRef]
- Montazeri-Gh, M.; Rasti, A. Analyzing different numerical linearization methods for the dynamic model of a turbofan engine. Mech. Ind. 2019, 20, 303. [Google Scholar] [CrossRef]
- Song, M.; Jianguo, T.; Sanmai, S. Optimization for the starting process of turbofan engine under high-altitude environment. IEEE Access 2018, 6, 55797–55806. [Google Scholar] [CrossRef]
- Bai, J.; Liu, S.; Wei, W. The nonlinear single controller of DGEN380 aero engine design. Int. J. Aerosp. Eng. 2019, 7209428, 1–12. [Google Scholar] [CrossRef]
- Qian, Y.; Ye, Z.; Zhang, H. LPV/PI control for nonlinear aeroengine system based on guardian maps theory. IEEE Access 2019, 7, 125854–125867. [Google Scholar] [CrossRef]
- Yazar, I.; Kiyak, E.; Caliskan, F. Simulation-based dynamic model and speed controller design of a small-scale turbojet engine. Aircr. Eng. Aerosp. Technol. 2018, 90, 351–358. [Google Scholar] [CrossRef]
- Beneda, K. Development of a modular FADEC for small scale turbojet engine. In Proceedings of the 2016 IEEE 14th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herlany, Slovakia, 21–23 January 2016. [Google Scholar]
- Lutambo, J.; Wang, J.; Yue, H. Aircraft turbine engine control systems development: Historical perspective. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Jie, B.; Shuai, L.; Wang, W. An integrated controller design for a small aero-engine. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar]
- Victor, S.; Taymans, A.; Melchior, P. Robust control system design of a turbofan. In Proceedings of the International Conference on Fractional Differentiation and Its Applications, Novi Sad, Republic of Serbia, 18–20 July 2016. [Google Scholar]
- Connolly, J.W.; Csank, J.; Chicatelli, A.; Franco, K. Propulsion controls modeling for a small turbofan engine. In Proceedings of the 53rd AIAA/SAE/ASEE Joint Propulsion Conference, Atlanta, GA, USA, 10–12 July 2017. [Google Scholar]
- Connolly, J.W.; Csank, J.; Chicatelli, A. Advanced control considerations for turbofan engine design. In Proceedings of the 52nd AIAA/SAE/ASEE Joint Propulsion Conference, Salt Lake City, UT, USA, 25–27 July 2016. [Google Scholar]
- Csank, J.; Connolly, J.W. Model-based engine control architecture with an extended Kalman Filter. In Proceedings of AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Andoga, R.; Fozo, L.; Judicak, J.; Breda, R.; Szabo, S.; Rozenberg, R.; Dzunda, M. Intelligent situational control of small turbojet engines. Int. J. Aerosp. Eng. 2018, 8328762, 1–16. [Google Scholar] [CrossRef]
- Walsh, P.P.; Fletcher, P. Gas. Turbine Performance, 2nd ed.; Blackwell Science: Oxford, UK, 2004; pp. 444–476. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Maximum take-off thrust (TOP, ISA, SL, MN0) | 2500 N |
| Specific fuel consumption (SFC TOP) | 0.0438 kg/N/h |
| Maximum cruise thrust (MCR, ISA, SL, MN0.338) | 1170 N |
| Specific fuel consumption (SFC MCR) | 7.58 |
| Weight (without nacelle) | 80 kg |
| Classify | Specification | ||
|---|---|---|---|
| Engine Simulator | Output | Temperature Sensor | RTD (8 Ch), Thermocouple (6 Ch), PTC (2 Ch) |
| Pressure Sensor | 12 Ch | ||
| Glowplug Current | 2 Ch | ||
| RPM Sensor | 4 Ch | ||
| PLA Sensor | 2 Ch | ||
| Frequency | 6 Ch | ||
| Discrete | 14 Ch | ||
| Input | Discrete | 12 Ch | |
| PWM | 6 Ch | ||
| Cockpit Simulator | Communication | ARINC429 (2 Ch), RS232 (2 Ch), Ethernet (2 Ch) | |
| Output | PLA Sensor | 2 Ch | |
| Discrete | 22 Ch | ||
| Input | Discrete | 22 Ch | |
| No. | Test Items | Standard | Method | Reference | Measurement (Case No.) | Decision | |||
|---|---|---|---|---|---|---|---|---|---|
| X1 | X2 | X3 | |||||||
| 1 | CH. A Discrete Output | Master (0/5 V, FS ± 10%) | Digital Multimeter | 0 V < X < 2.6 V (ON) | 0.698 | 0.699 | 0.698 | OK | |
| 2.6 V < X < 5 V (OFF) | 4.05 | 4.05 | 4.05 | ||||||
| 2 | IGN | 0 V < X < 2.6 V (ON) | 0.702 | 0.703 | 0.701 | OK | |||
| DCRANK | 0 V < X < 2.6 V (ON) | 0.684 | 0.684 | 0.684 | |||||
| WCRANK | 0 V < X < 2.6 V (ON) | 0.696 | 0.696 | 0.696 | |||||
| 3 | Normal | IGN | 2.6 V < X < 5 V (OFF) | 4.8 | 4.8 | 4.8 | OK | ||
| DCRANK | 2.6 V < X < 5 V (OFF) | 4.8 | 4.8 | 4.8 | |||||
| WCRANK | 2.6 V < X < 5 V (OFF) | 4.8 | 4.8 | 4.8 | |||||
| 4 | WOW (0/5 V, FS ± 10%) | 0 V < X < 2.6 V (ON) | 0.704 | 0.704 | 0.704 | OK | |||
| 2.6 V < X < 5 V (OFF) | 4.8 | 4.8 | 4.8 | ||||||
| 5 | CH_A | 0 V < X < 2.6 V (ON) | 0.7 | 0.7 | 0.7 | OK | |||
| CH_AUTO | 0 V < X < 2.6 V (ON) | 0.692 | 0.692 | 0.692 | |||||
| CH_B | 0 V < X < 2.6 V (ON) | 0.690 | 0.690 | 0.690 | |||||
| 6 | OFCsts (0/5 V, FS ± 10%) | 0 V < X < 2.6 V (ON) | 0.142 | 0.141 | 0.141 | OK | |||
| 2.6 V < X < 5 V (OFF) | 4.21 | 4.22 | 4.22 | ||||||
| No. | Test Items | Test Result | ||
|---|---|---|---|---|
| Ch. A | Ch. B | |||
| 1 | Discrete Output | MASTER | OK | OK |
| 2 | IGN | OK | OK | |
| 3 | DCRANK | OK | OK | |
| 4 | WCRANK | OK | OK | |
| 5 | NORMAL | OK | OK | |
| 6 | WOW | OK | OK | |
| 7 | CH_A | OK | OK | |
| 8 | CH_AUTO | OK | OK | |
| 9 | CH_B | OK | OK | |
| 10 | OFCsts | OK | OK | |
| 11 | FFCsts | OK | OK | |
| 12 | OLLsts | OK | OK | |
| 13 | FMVsts | OK | OK | |
| 14 | FSVsts | OK | OK | |
| 15 | OSOVsts | OK | OK | |
| 16 | Discrete Input | GPcmd | OK | OK |
| 17 | FMVcmd | OK | OK | |
| 18 | FSVcmd | OK | OK | |
| 19 | OSOVcmd | OK | OK | |
| 20 | SGstart | OK | OK | |
| 21 | SGmode | OK | OK | |
| 22 | Analog Output | PS3 | OK | OK |
| 23 | P0 | OK | OK | |
| 24 | PFuel | OK | OK | |
| 25 | POil | OK | OK | |
| 26 | T6 | OK | OK | |
| 27 | T0 | OK | OK | |
| 28 | TFuel | OK | OK | |
| 29 | TOil | OK | OK | |
| 30 | TSG | OK | OK | |
| 31 | GPcur | OK | OK | |
| 32 | PLA | OK | OK | |
| 33 | NH | OK | OK | |
| 34 | NL | OK | OK | |
| 35 | FPMspd | OK | OK | |
| 36 | OPMspd | OK | OK | |
| 37 | SGspd | OK | OK | |
| 38 | Analog Input | FPMcmd | OK | OK |
| 39 | OPMcmd | OK | OK | |
| 40 | SGcmd | OK | OK | |
| No. | Test Items | Standard | Method | Reference | Measurement (Case No.) | Decision | ||
|---|---|---|---|---|---|---|---|---|
| 1 | CH. A Discrete Output | Master (ON/OFF) | MASTER Switch | ON | ON | ON | ON | OK |
| OFF | OFF | OFF | OFF | |||||
| 2 | IGN (ON) | MODE Switch | IGN | IGN | IGN | IGN | OK | |
| DCRANK (ON) | DCRANK | DCRANK | DCRANK | DCRANK | ||||
| WCRANK (ON) | WCRANK | WCRANK | WCRANK | WCRANK | ||||
| 3 | NOMAL (ON) | NOMAL | NOMAL | NOMAL | NOMAL | OK | ||
| 4 | WOW (ON/OFF) | WOW Switch | Ground | Ground | Ground | Ground | OK | |
| Flight | Flight | Flight | Flight | |||||
| 5 | CH_A | Channel Switch | CH_A | CH_A | CH_A | CH_A | OK | |
| CH_AUTO | CH_AUTO | CH_AUTO | CH_AUTO | CH_AUTO | ||||
| CH_B | CH_B | CH_B | CH_B | CH_B | ||||
| 6 | OFCsts (0/5 V) | Engine Simulator | Discrete, 0 | Clogged | Clogged | Clogged | OK | |
| Discrete, 1 | Not Clogged | Not Clogged | Not Clogged | |||||
| 7 | FFCsts (0/5 V) | Engine Simulator | Discrete, 0 | Clogged | Clogged | Clogged | OK | |
| Discrete, 1 | Not Clogged | Not Clogged | Not Clogged | |||||
| 8 | OLLsts (0/5 V) | Engine Simulator | Discrete, 0 | Low Oil | Low Oil | Low Oil | OK | |
| Discrete, 1 | Enough Oil | Enough Oil | Enough Oil | |||||
| 9 | FMVsts (0/5 V) | Engine Simulator | Discrete, 0 | Open | Open | Open | OK | |
| Discrete, 1 | Closed | Closed | Closed | |||||
| 10 | FSVsts (0/5 V) | Engine Simulator | Discrete, 0 | Open | Open | Open | OK | |
| Discrete, 1 | Closed | Closed | Closed | |||||
| 11 | OSOVsts (0/5 V) | Engine Simulator | Discrete, 0 | Open | Open | Open | OK | |
| Discrete, 1 | Closed | Closed | Closed | |||||
| No. | Test Items | Test Result | ||
|---|---|---|---|---|
| Ch. A | Ch. B | |||
| 1 | Discrete Output | MASTER | OK | OK |
| 2 | IGN | OK | OK | |
| 3 | DCRANK | OK | OK | |
| 4 | WCRANK | OK | OK | |
| 5 | NORMAL | OK | OK | |
| 6 | WOW | OK | OK | |
| 7 | CH_A | OK | OK | |
| 8 | CH_AUTO | OK | OK | |
| 9 | CH_B | OK | OK | |
| 10 | OFCsts | OK | OK | |
| 11 | FFCsts | OK | OK | |
| 12 | OLLsts | OK | OK | |
| 13 | FMVsts | OK | OK | |
| 14 | FSVsts | OK | OK | |
| 15 | OSOVsts | OK | OK | |
| 16 | Discrete Input | GPcmd | OK | OK |
| 17 | FMVcmd | OK | OK | |
| 18 | FSVcmd | OK | OK | |
| 19 | OSOVcmd | OK | OK | |
| 20 | SGstart | OK | OK | |
| 21 | SGmode | OK | OK | |
| 22 | Analog Output | PS3 | OK | OK |
| 23 | P0 | OK | OK | |
| 24 | PFuel | OK | OK | |
| 25 | POil | OK | OK | |
| 26 | T6 | OK | OK | |
| 27 | T0 | OK | OK | |
| 28 | TFuel | OK | OK | |
| 29 | TOil | OK | OK | |
| 30 | TSG | OK | OK | |
| 31 | GPcur | OK | OK | |
| 32 | PLA | OK | OK | |
| 33 | NH | OK | OK | |
| 34 | NL | OK | OK | |
| 35 | FPMspd | OK | OK | |
| 36 | OPMspd | OK | OK | |
| 37 | SGspd | OK | OK | |
| 38 | Analog Input | FPMcmd | OK | OK |
| 39 | OPMcmd | OK | OK | |
| 40 | SGcmd | OK | OK | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kho, S.; Park, H. Design of the Electronic Engine Control Unit Performance Test System of Aircraft. Aerospace 2021, 8, 158. https://doi.org/10.3390/aerospace8060158
Kho S, Park H. Design of the Electronic Engine Control Unit Performance Test System of Aircraft. Aerospace. 2021; 8(6):158. https://doi.org/10.3390/aerospace8060158
Chicago/Turabian StyleKho, Seonghee, and Hyunbum Park. 2021. "Design of the Electronic Engine Control Unit Performance Test System of Aircraft" Aerospace 8, no. 6: 158. https://doi.org/10.3390/aerospace8060158
APA StyleKho, S., & Park, H. (2021). Design of the Electronic Engine Control Unit Performance Test System of Aircraft. Aerospace, 8(6), 158. https://doi.org/10.3390/aerospace8060158