3.1. Minimum Drag Solution and Optimal Trimmed Polar
As demonstrated in
Section 2, and in particular in Equations (
12) and (
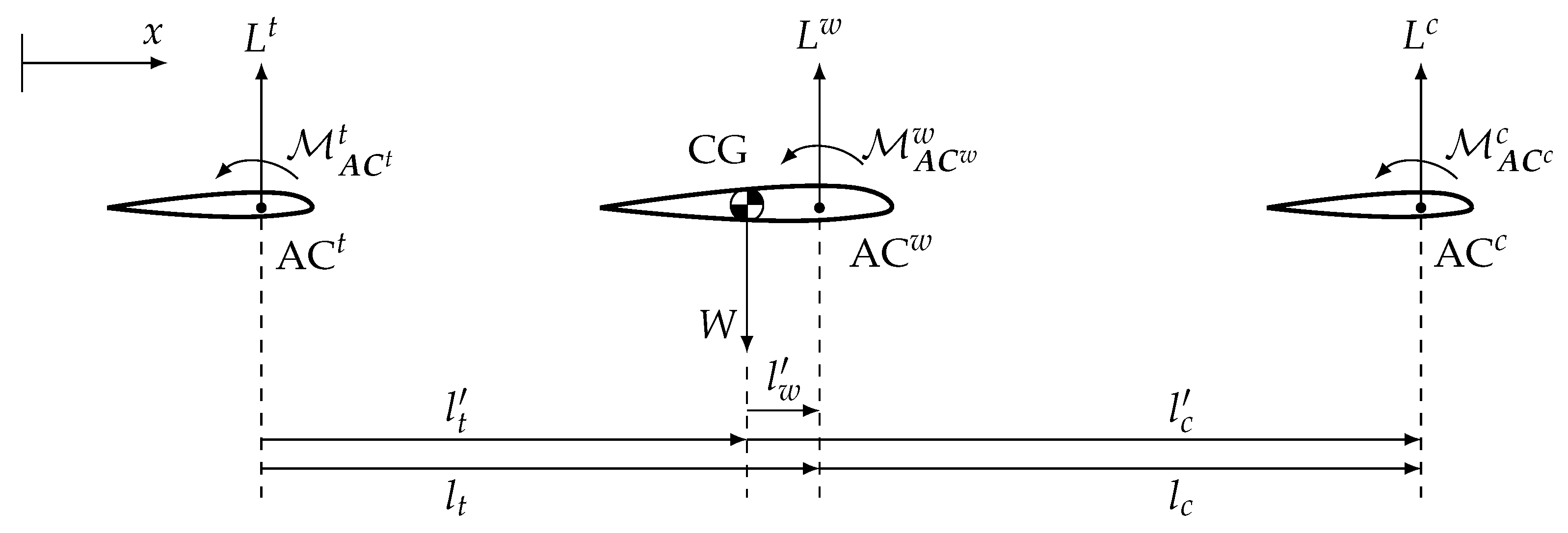
30), lift and pitching moment for the three-surface airplane with redundant longitudinal control can be viewed as linear functions of three independent variables,
,
and
. Consider a steady flight condition along a straight horizontal trajectory, at a specific altitude with air density
and speed
V. In such flight regime, the vertical and pitching rotation equilibrium can be written as
where
is the lift coefficient at trim
and
W is the airplane weight.
For convenience, Equation (
48) can be written as
where
Equation (
47) represents a set of two equations with three unknowns, which actually shows the redundancy in the longitudinal control when it comes to finding the trim solution, i.e., one has an ideally infinite number of possibilities to satisfy both vertical and pitch moment equilibria with different triads
.
This indeterminacy can be exploited for optimizing a merit index connected to the specific flight regime at hand. Moreover, since the trim lift coefficient will be function of the airplane speed V and weight W, optimizing the control inputs, and , will be possible for each speed and weight, as opposed to what happens for standard aircraft, which are optimally designed only for a single condition.
To show this concept, one may consider the set
which minimizes the drag coefficient
, given a specific trim lift coefficient,
. The drag coefficient
as a merit function represents a suitable choice for coping with the redundancy. In fact, for a specific speed and weight—hence, for a specific
—minimum drag is associated to maximum lift-to-drag ratio
, maximum power index
and maximum index
, which are all conditions associated to optimal performance in cruise for jet and propeller airplanes [
14] (Chapter 2).
From a practical standpoint, the problem at hand could be viewed as the one of finding the angle of attack and the controls and , grouped in vector , that, for each specific speed, are able to trim the aircraft and, at the same time, to minimize its drag.
The optimal trim problem is then formalized as
where function
is given in Equation (
26).
Solution of the constrained problem (
51) can be found with an unconstrained minimization of a suitable cost function
J where constraints are considered through the Lagrange multipliers. To this end,
J is defined as
where
represents the array of the Lagrange multipliers.
Imposing null partial derivatives with respect to
and
, to find the minimum
J, leads to the following system of two equations
which admits the following solution for
where
I is the 3 × 3 identity matrix.
Equation (54) can be rearranged to separate a constant contribution
and a coefficient which multiplies
y*, as
where
and
Notice that, since the second column of
multiplies the null element of
, vector
may be expressed directly as a linear function of the trim lift coefficient
, as
where
is the first column of
. Equation (58) demonstrates that there exists a simple linear relationship between the trim lift
and the variables
,
and
, which allows for the minimization of the overall drag while trimming the aircraft. Furthermore, since Equation (54) is of general validity, we can expect that coefficients
and
will be different for different aircraft configurations (e.g., different positions of the center of gravity) and flight regimes (e.g., passing from subsonic to transonic flight). However, as long as we consider linear aerodynamics and a quadratic drag polar, the optimal trim variables will be easily described as linear functions of the lift coefficient
.
Finally, due to the linearity of all trim variables with respect to , it is possible to find a linear dependency between the deflection of the canard tail elevator for minimal drag.
To show this, first expand Equation (58) for each scalar variable in
,
with
,
and
, respectively the first, second and third elements of
. The last two lines of Equation (59) can be used to derive the relationship between the deflection of the two control surfaces as
with
and
.
As a final remark, inserting the optimal values for
,
and
of Equation (59) into the expression of the drag coefficient in Equation (
24), an expression of the optimal
trimmed polar is readily obtained, which may be used for flight mechanics performance evaluation.
3.2. Optimization of Three-Surface Configuration for Maximum Lift-To-Drag Ratio
In this paragraph, the potential benefit of the three-surface configuration with redundant control on flight mechanics performance will be illustrated. In particular, a revision of the configuration of an existing two-surface aircraft will be considered, transforming it into a three-surface one, through the addition of a canard equipped with a movable surface. The final aim of this part is to assess the possibility to find a three-surface version of a standard two-surface aircraft with an improved lift-to-drag ratio.
From a technical standpoint, although limited, such an approach has the advantage of providing an indication of the goodness of the three-surface concept without requiring a complete design process—itself an activity of interest, which however falls outside of the scope of the present paper.
In fact, when thinking of the longitudinal configuration of a brand-new three-surface aircraft, in order to satisfy stringent performance, stability and maneuverability requirements, one should define, for a given fuselage, the values of six variables, e.g., the sizes of canard, tail and wing, , and S, and the related location of their aerodynamic centers , and . On the other hand, as it will be shown in the rest of this paragraph, when formulating the problem as an update of an existing two-surface airplane, one may introduce some constraints, which are necessary to primarily ensure that any new aircraft configuration share with the nominal one the same performance, and secondarily to limit the number of design parameters, and make the analysis easier to manage.
In accordance with the previous discussion, the wing area
S was kept fixed to its nominal value. Furthermore, in order to provide for an airplane with similar stability and maneuvering characteristics, the static margin, defined in Equation (
32), and the total empennage volume
, defined as the sum of the volumes of the tail and canard,
, were kept constant. Moreover, the position of the third surface to be added to the nominal (two-surface) airplane is constrained by the length of the fuselage. Accordingly, the canard surface was placed in the farthermost forward position, which is expected to entail the best stability and maneuverability performance thanks to the beneficial impact of a higher moment arm. Based on a similar argument, the tail location is kept frozen and equal to that of the nominal airplane.
Dealing with the balance between degrees of freedom and constraints, after fixing the wing area and the location of tail and canard, and imposing the equality of the static margin and the total empennage volume between updated (three-surface) and nominal (two-surface) aircraft, the sizing problem results characterized by a single degree of freedom to be chosen among variables , and . The canard surface is here selected as the optimization parameter.
For the sake of clarity, in the present work, the optimal three-surface configuration was found through a simple sensitivity analysis in which different canard surfaces are considered, rather than via a full optimization problem. Accordingly, the following approach was adopted to update the aircraft configuration. Given a specific value for
, in order to satisfy the total tail volume and static margin constraints, both the size of the tail
and the position of the aerodynamic center of the main wing
are altered solving the following nonlinear problem
where
and
are respectively the total empennage volume and the static margin of the nominal airplane.
Notice that, in this framework, we are including also the standard back-tailed airplane, corresponding to the nominal airplane, i.e., when , and a canard version with same static margin and canard volume, in case —which is obtained through a specific setting of , to be better defined next. In between these two cases, we have all possible three-surface configurations, characterized again by the same total tail volume and static margin.
Obviously, the addition of the new forward surface, along with the modification in the tail size and wing location, generates also a change in the position of the aircraft center of gravity, which is to be taken into account. To this end, in any iteration of the solution of problem (61), the actual position of the aircraft center of gravity
is computed as
where
is the total mass of the nominal aircraft, while
the mass of the wing,
and
are respectively the locations of the center of gravity of the actual and nominal wing,
and
are the locations of the center of gravity of tail and canard. Finally,
and
are the differences in the actual mass of tail and canard with respect to the nominal ones, which are estimated exploiting the Torenbeek method reported in Roskam [
15] (Part V, Chapter 5), which relates the empennage mass with its own surface, as
where
and
are the weight in
and the area in
of the empennage,
the reference dive speed in
and
a coefficient equal to 1.0 or 1.1 respectively for fixed- or variable-incidence empennage.
Given a specific canard surface, the solution of problem (61) yields a new configuration of an equivalent three-surface airplane, featuring a trimmed polar which can be computed employing the optimization method described in
Section 3.1. Clearly, for two-surface back-tailed and canard configurations, the trimmed polar is obtained following the standard methodology [
16].
3.3. Updating a Twin-Engine, Two-Surface, Propeller Driven Airplane into an Optimal Three-Surface One
In this paragraph, the reconfiguration process explained in
Section 3.2 will be applied to an aircraft model loosely based on the Diamond DA42 Twin Star, hereafter called nominal aircraft. The main characteristics of this nominal model are reported in
Table 1. Aerodynamic coefficients were computed based on [
17].
Different equivalent aircraft were generated adding a canard lifting surface with
at a location corresponding to fuselage maximum forward extension. For each new configuration, the size of the tail
and the location of the wing
were altered so as to maintain the same static margin and the same total tail volume of the nominal aircraft, as described by the constraints formulated in
Section 3.2. The extreme values of the range of
refer respectively to the nominal configuration, for
, and to an equivalent two-surface canard airplane, for
, which resulted associated to null
, given the data of the nominal aircraft and the problem constraints in Equation (61).
The characteristics of the canard surface common to all considered three-surface configurations are reported in
Table 2.
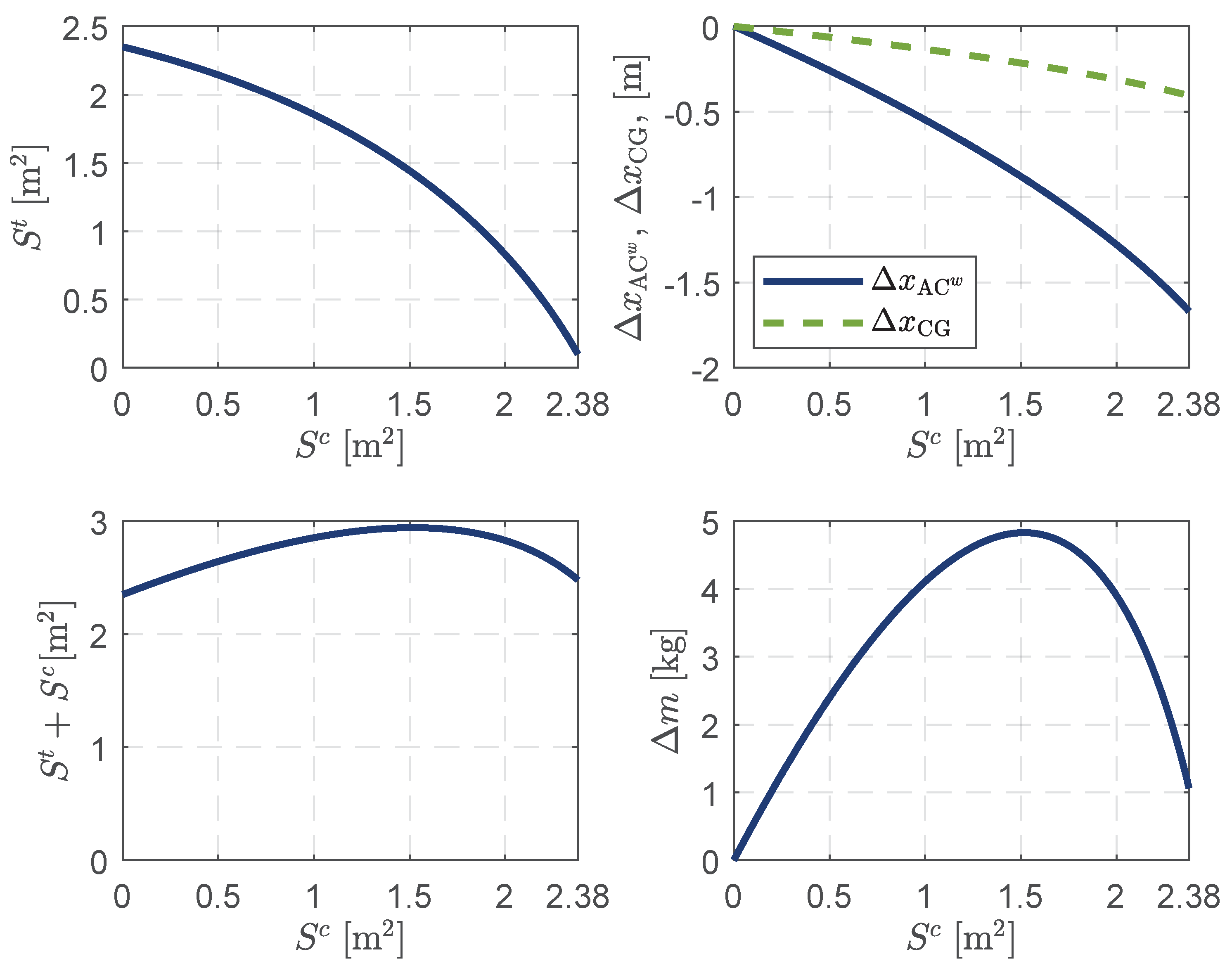
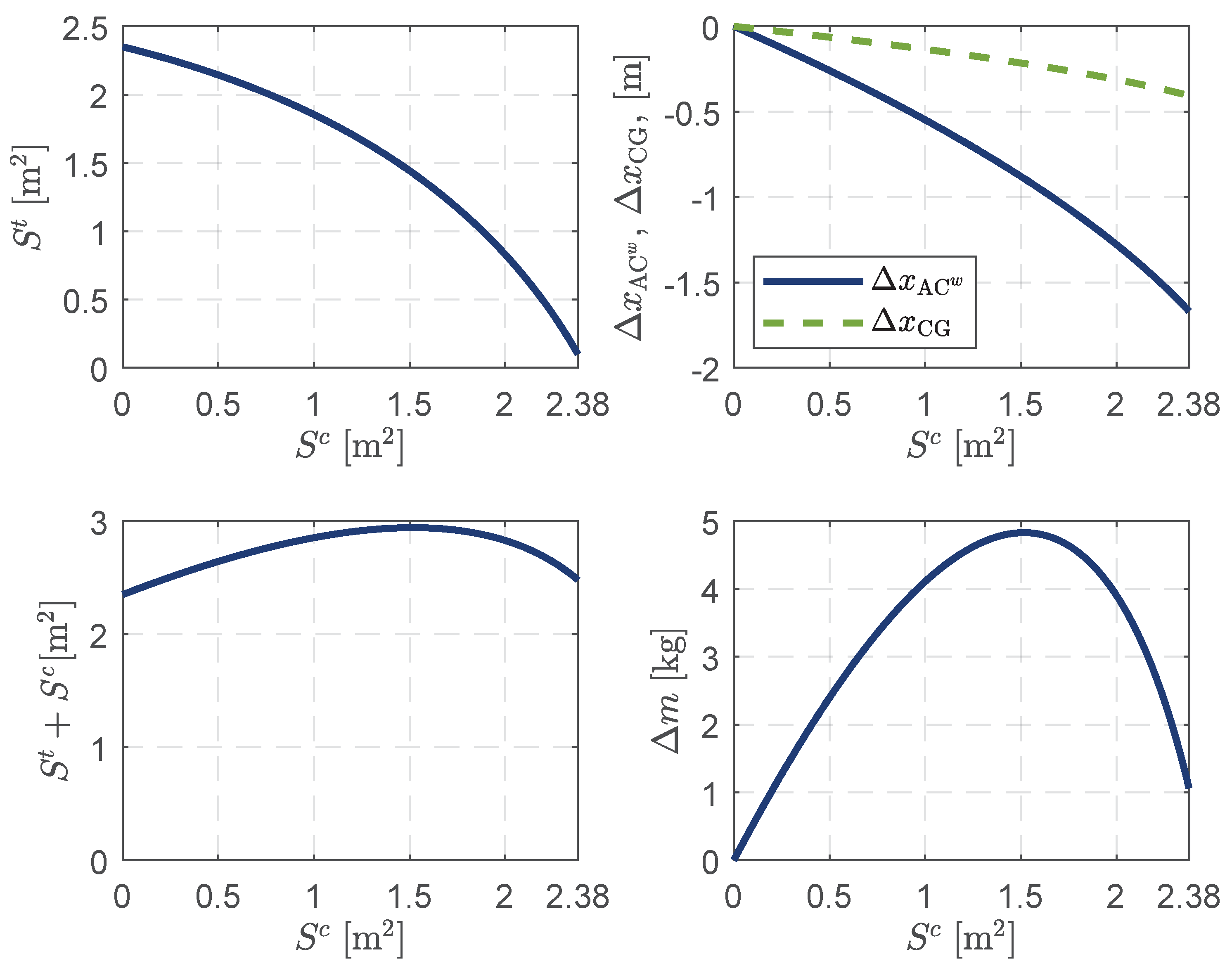
Figure 3 shows as functions of the canard surface
some characteristics of the updated three-surface aircraft. The variation of the tail size and wing location are displayed respectively in the top-left and top-right plot. The top-right plot reports also the change of the airplane center of gravity, induced by the alteration of the wing position and the modification of the area of tail and canard. The bottom-left plot shows the total area of the empennages, while the bottom-right plot refers to the addition of the mass
resulting from the generation of the equivalent new configurations.
Notice how the location of the wing moves backward as the canard surface increases to compensate for the destabilizing effect of the canard itself. This happens because the sensitivity of the neutral point with respect to the wing position is higher than that of the center of gravity. A mild increase in the total area of the empennages, sum of that of tail and canard, is experienced due to the introduction of the third lifting surface. This effect results from the fact that canard and tail are not equally distant from the aerodynamic center of the wing. Therefore, to impose the constraint on the total volume of the empennages, an increase in the canard area is associated to a tail area reduction of a lower magnitude, which eventually leads to an increase in the total mass. However, from the bottom-right plot in
Figure 3, the latter appears negligible with respect to the total weight of the airplane.
As a remark, it can be observed that based on the assumed aspect ratio of the canard (
Table 2, yielding a value of
5.5), the corresponding values of the canard span can be computed from
Figure 3. This allows to accurately compare the canard span to the distance between the canard and wing aerodynamic centers. For instance, for a value of
1.2 m
, this comparison yields a ratio of about 2.6 between the distance of the aerodynamic centers and the canard span, which is in good accordance with the hypothesis required for decoupling (as previously mentioned, a ratio greater than 1). For the top considered value of the canard surface (about
2.38 m
), this ratio is equal to 2.4, showing that the aforementioned hypothesis on aerodynamics decoupling holds through all considered values of canard surface.
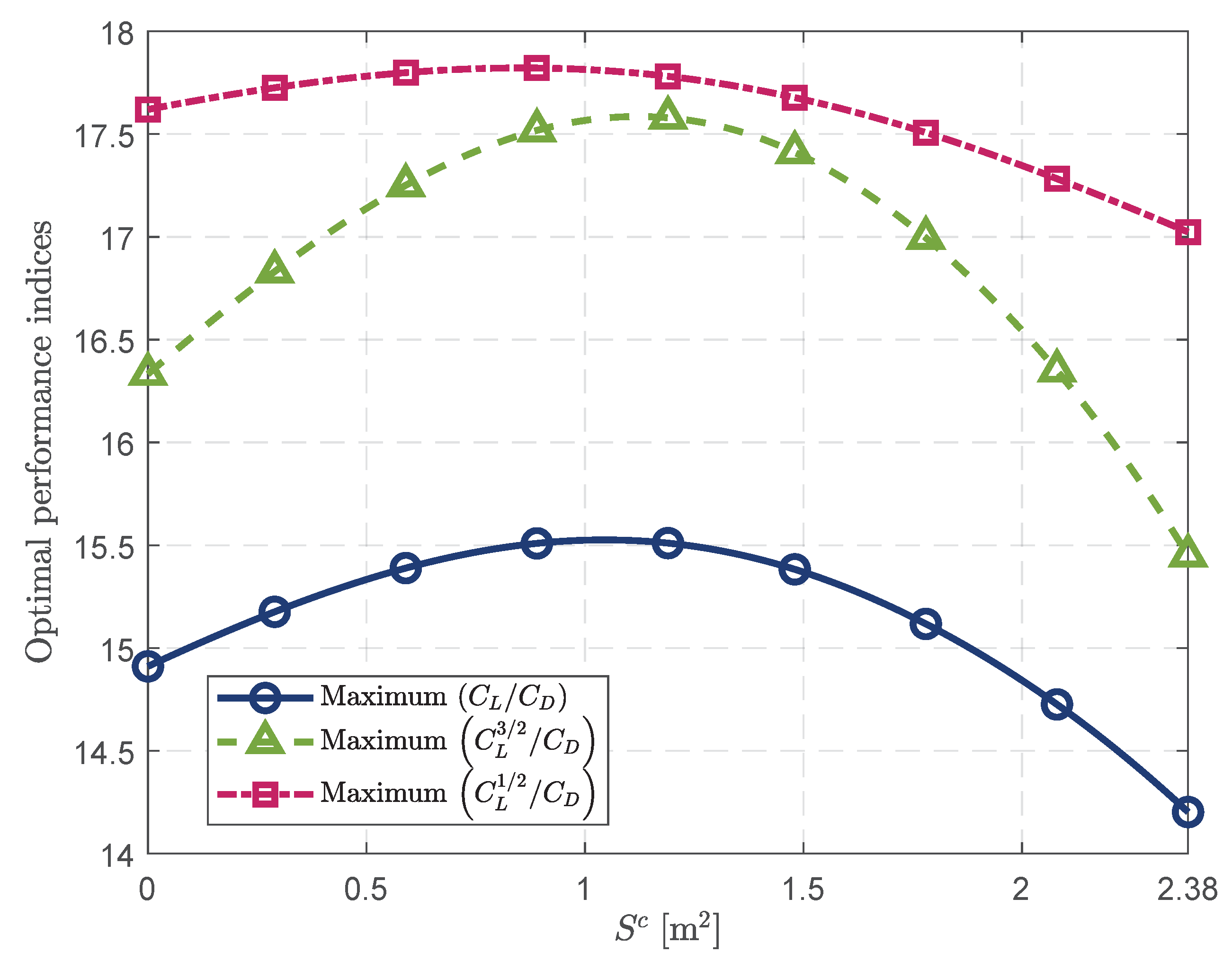
A relevant result of this analysis is reported in
Figure 4, which shows the maximum achievable performance indices as function of the different configurations of three-surface airplane for variable canard areas. The maximum lift-to-drag ratio
, maximum power index
and maximum
were chosen as indicators for assessing the best possible airplane configuration among traditional back-tailed, canard and three-surface ones.
Both lift-to-drag ratio
and power index
are measures of performance of paramount importance for cruise of a prop-driven airplane, with ideally constant BSFC (Brake Specific Fuel Consumption), for which the maximum range and maximum endurance are respectively proportional to the maximum
and to the maximum
[
14] (Chapter 2). It turns out that any increment in the values of such indices will lead to improved cruise performance, either in terms of range and endurance, or through a reduction of fuel consumption.
From the plot, it can be clearly noticed that a three-surface configuration with of about is associated to the maximum values of the optimal indices for both performance indices, with an increase of about 4.0% in the maximum lift-to-drag ratio and about 7.6% in the power index.
Firstly, this fact demonstrates that it is possible to obtain an airplane with improved performance thanks to the addition of a third lifting surface with redundant longitudinal control. The expected gains are non-negligible, and may be worth the additional complexity entailed by such configuration.
Secondarily, since the update process is applied to an existing aircraft, it is reasonable to expect that a full redesign, which might consider also the size of the main wing as an optimization parameter, could in principle lead to more significant improvements. For example, with reference to the plots in
Figure 3 one may immediately see that the optimal canard area
is associated to a tail area of about 1.7
and to an increment of the total empennage area
of about 0.54
. Consequently, in order to compensate for such increment, one may imagine to reduce of the same entity the area of the main wing with a potential beneficial impact on weight, drag and size of the entire airplane.
Thirdly, looking again at
Figure 3, the optimal configuration is associated to an increase of the total mass of the airplane of less than 5
, which appears negligible given the mass of the nominal airplane, as already remarked. Clearly, that increment is related to the balance between the addition of a canard surface, as well as a reduction of the tail area. Other effects on the overall mass of the aircraft, potentially linked to the appearance of a new aerodynamic surface (like further control links), have not been accounted for at this level.
Fourthly, due to limited size of the canard, it is even reasonable to envision that the optimal three-surface configuration might not impact dramatically on the fuselage design and on its weight. In fact, the possible weight increment due to the addition of structural reinforcements in correspondence of the canard may be compensated by a lightening in the aft fuselage as a consequence of the smaller tail. Hence, although this should be verified with a detail design, a strong penalization in terms of fuselage structures and weight is not to be expected.
Figure 4 shows also the maximum
index as a function of
. Clearly, such index is relevant only for jet airplanes with ideally constant TSFC (Thrust Specific Fuel Consumption), featuring the optimal range in the very correspondence of the maximum of that index. Hence, it may be of limited interest for the case considered in this paper. However, the plot reveals a potential gain of about 1.1% also for that index, for
. That area is slightly smaller than that obtained for optimal lift-to-drag ratio and power index. This finding suggests that the redundant control may be beneficial also for different types of airplane with respect to the one analyzed here. Moreover, since optimal performance indices may be obtained for different canard sizes, it is thought that a compromise choice will have to be done, when it will come to the full design or re-design of a new airplane on the basis of the relative importance that indices
,
or
have in accordance with the airplane mission.
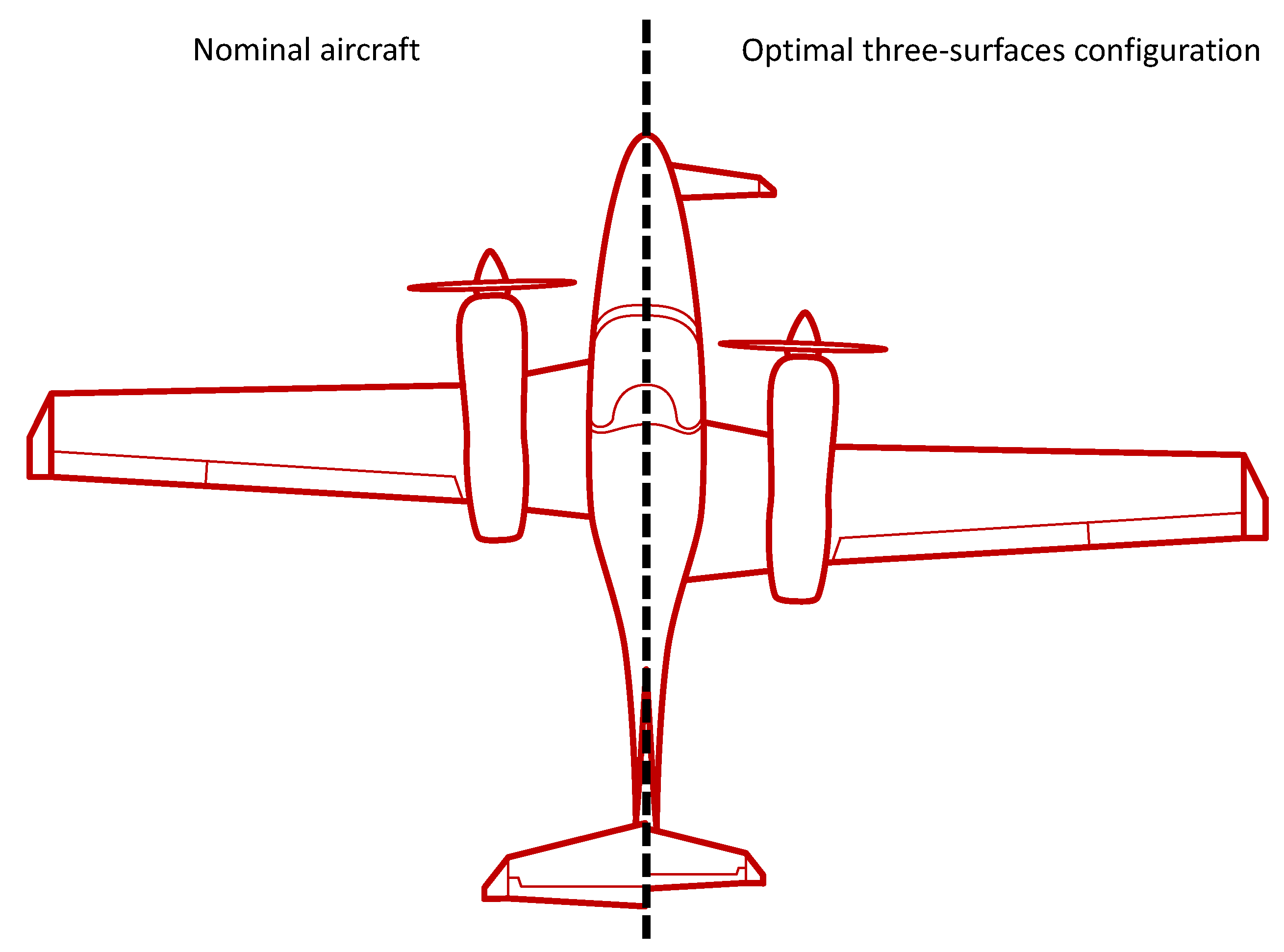
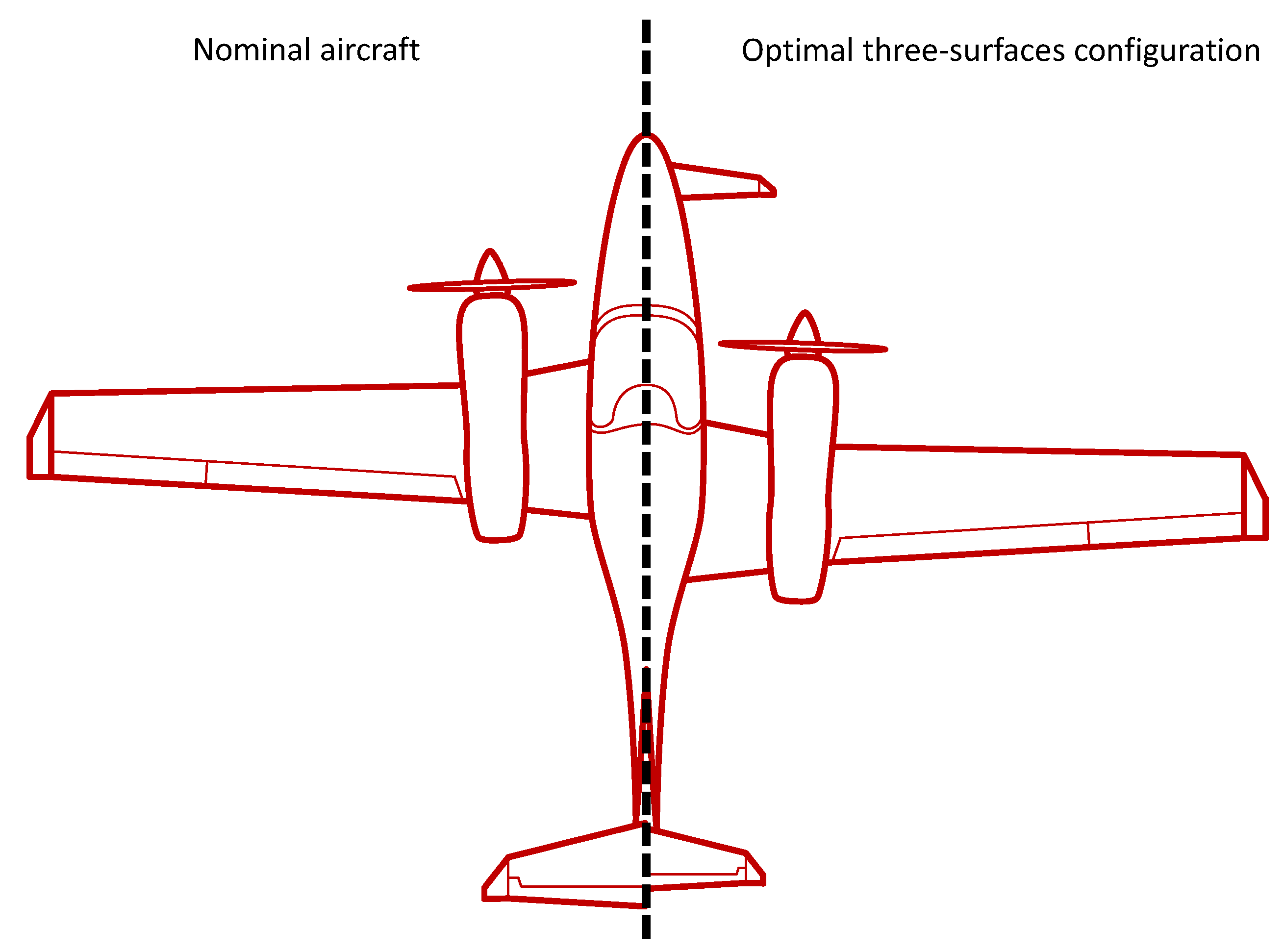
Finally,
Figure 5 proposes a comparison in the appearance of the three-surface modified airplane for optimal lift-to-drag ratio and power index (right part) and the nominal one (left part). Through the sketch, the main changes in the configuration, i.e., the addition of the third surface, the subsequent reduction of the tail area and the backward shift of the main wing, are easily detectable. Both airplanes have similar mass, the same total empennage volume and the same static margin, but the updated one is characterized by a lift-to-drag ratio increased of about 4.0%, and power index of about 7.6%.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}