
Unmanned Aerial Vehicle Operating Mode Classification Using Deep Residual Learning Feature Extraction



Abstract
1. Introduction
2. Materials and Methods
2.1. Dataset
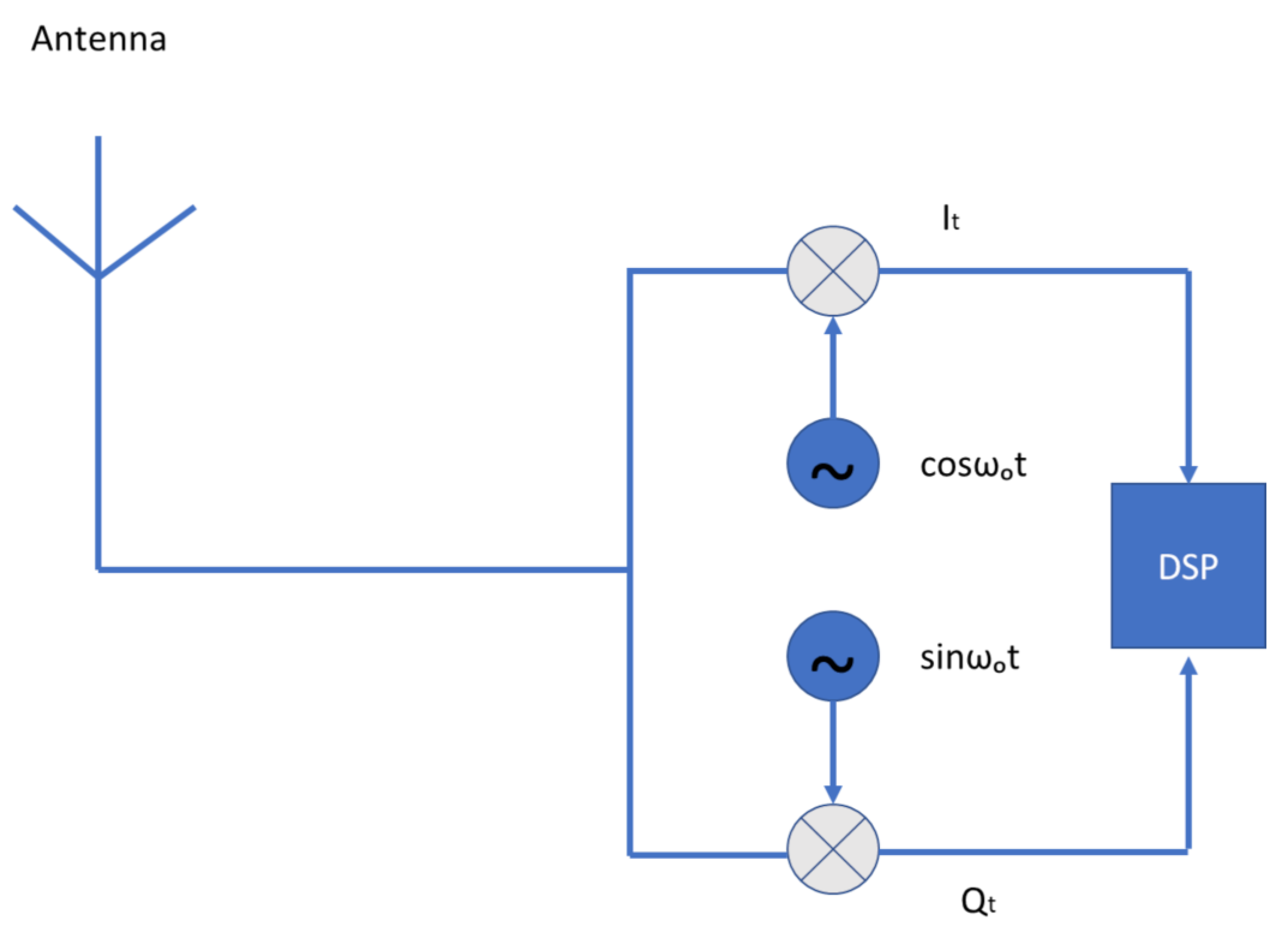
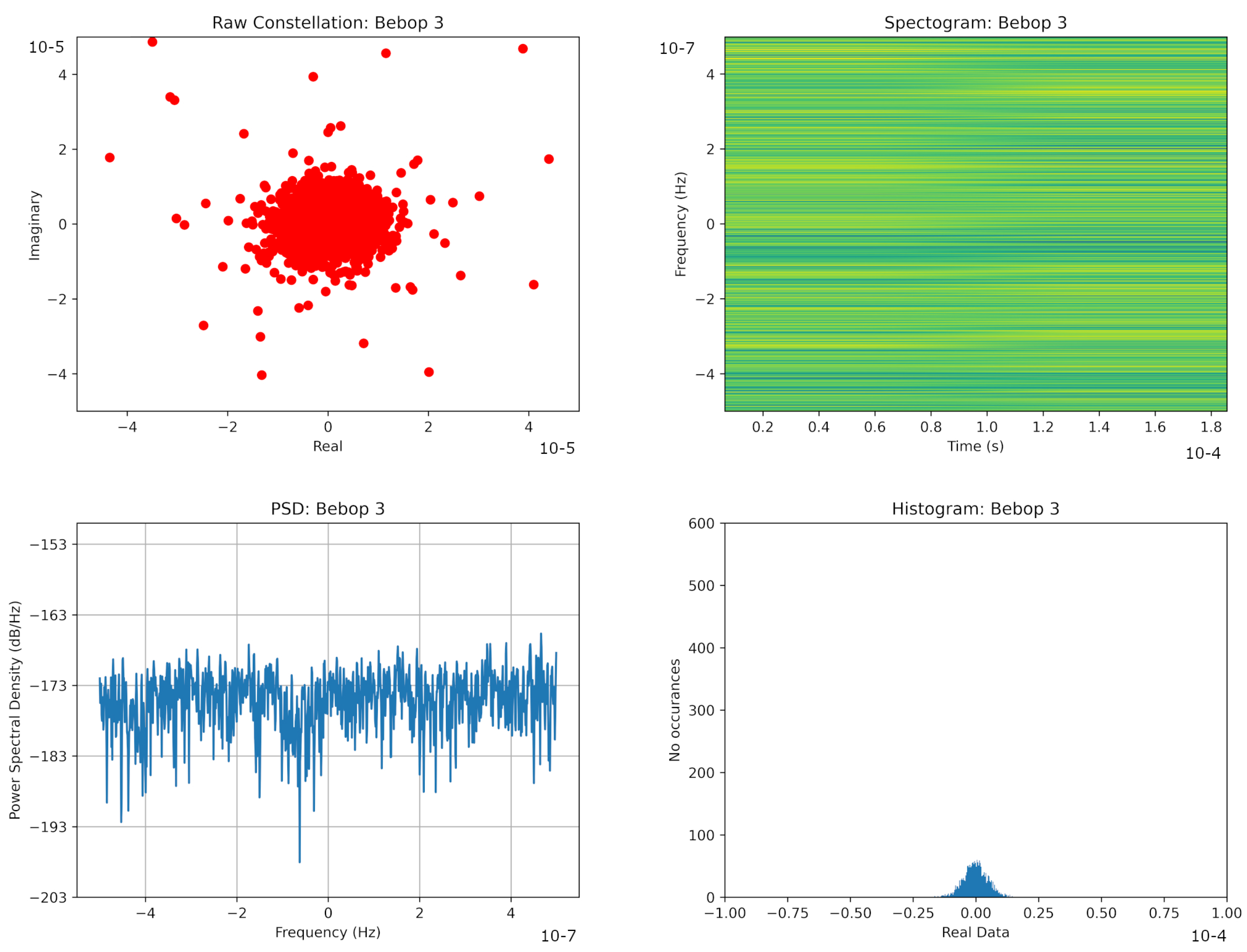
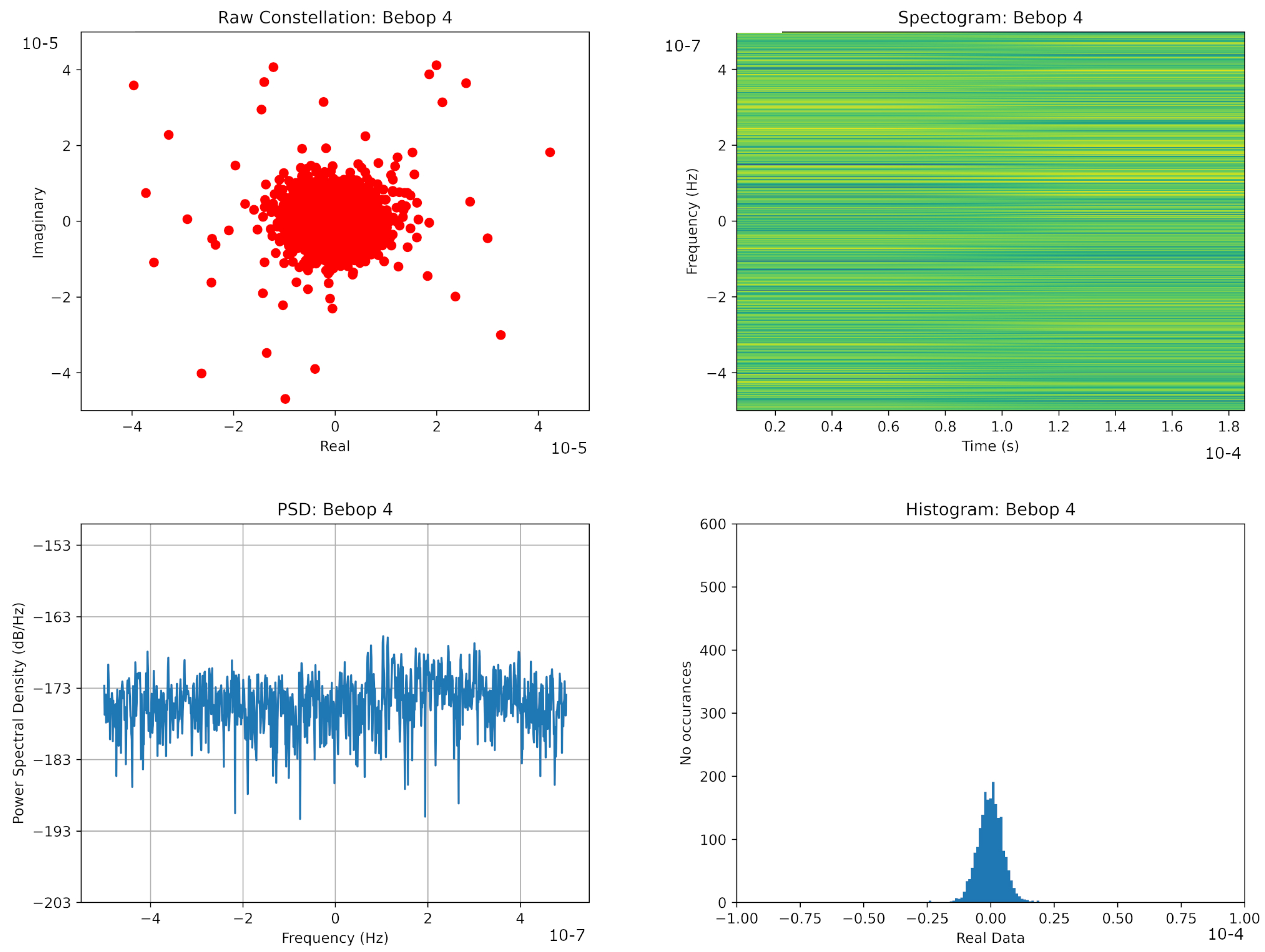
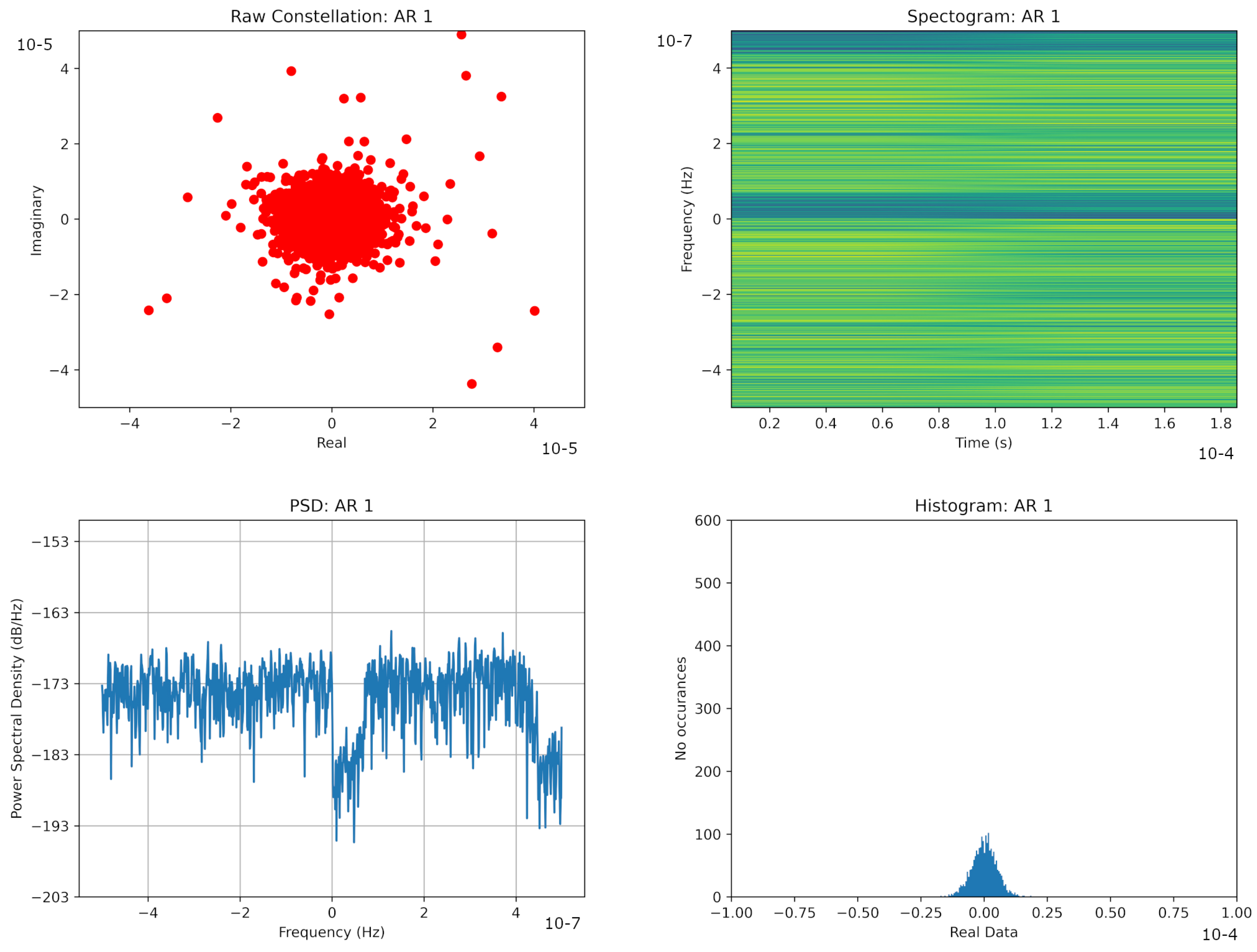
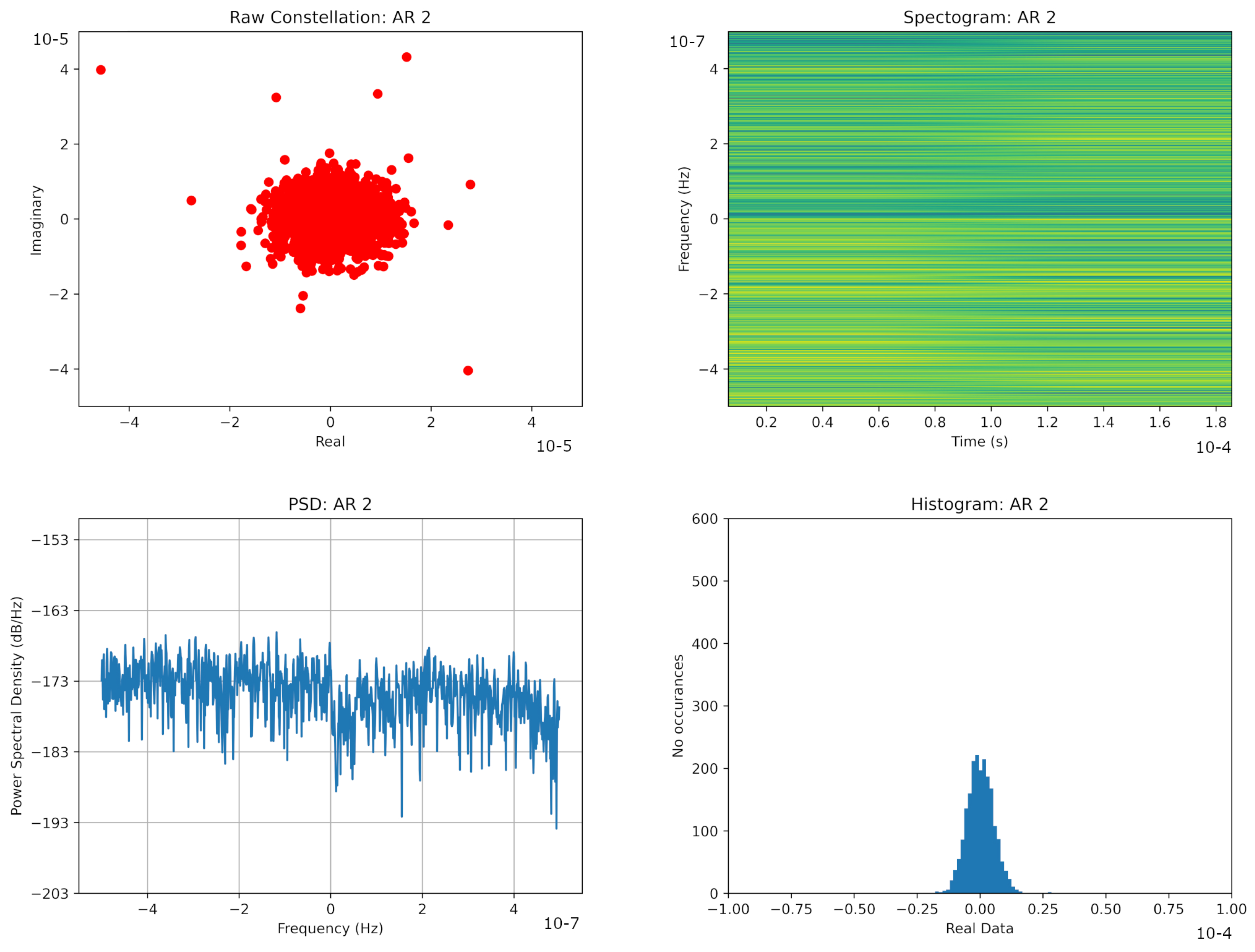
2.2. Signal Representation
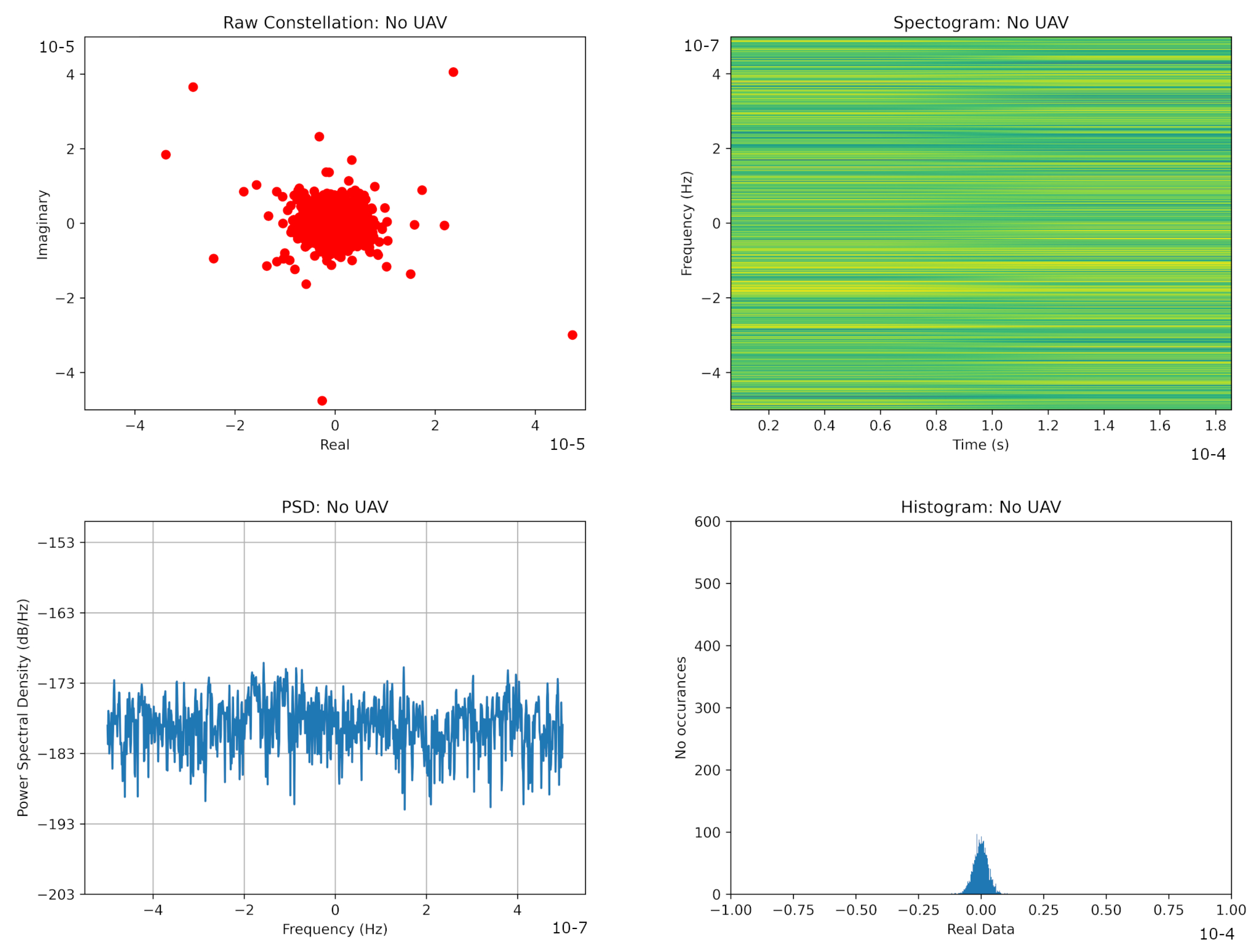
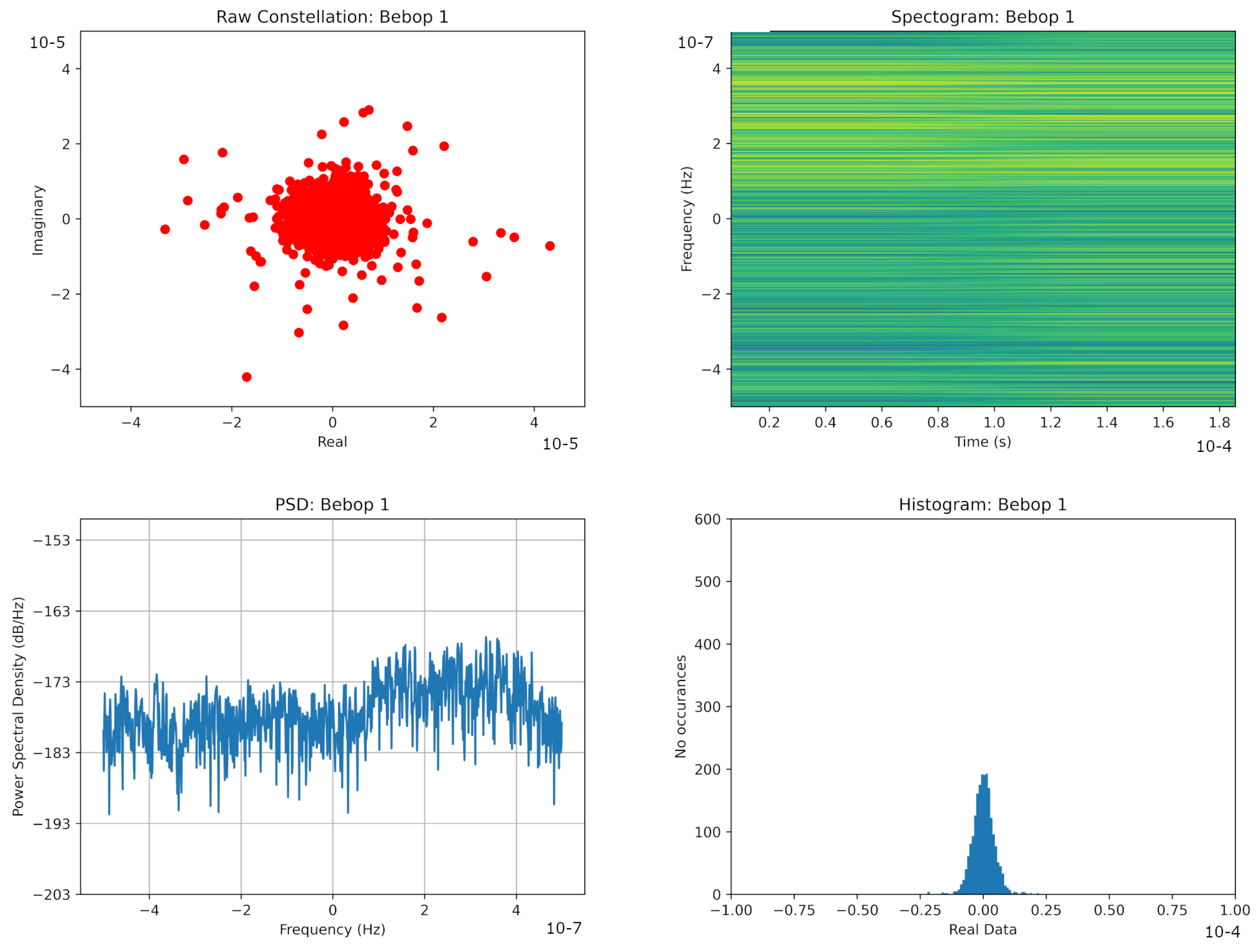
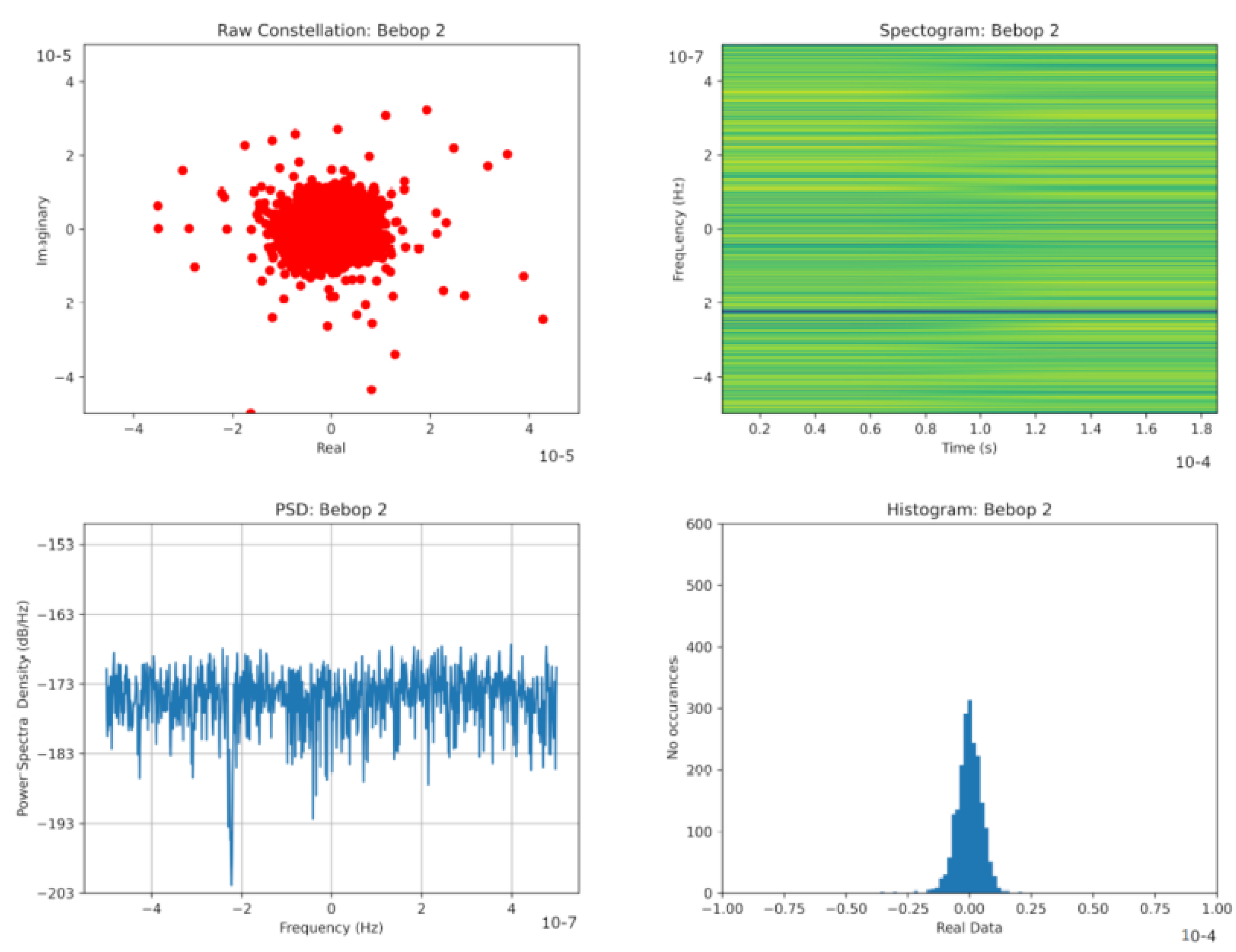
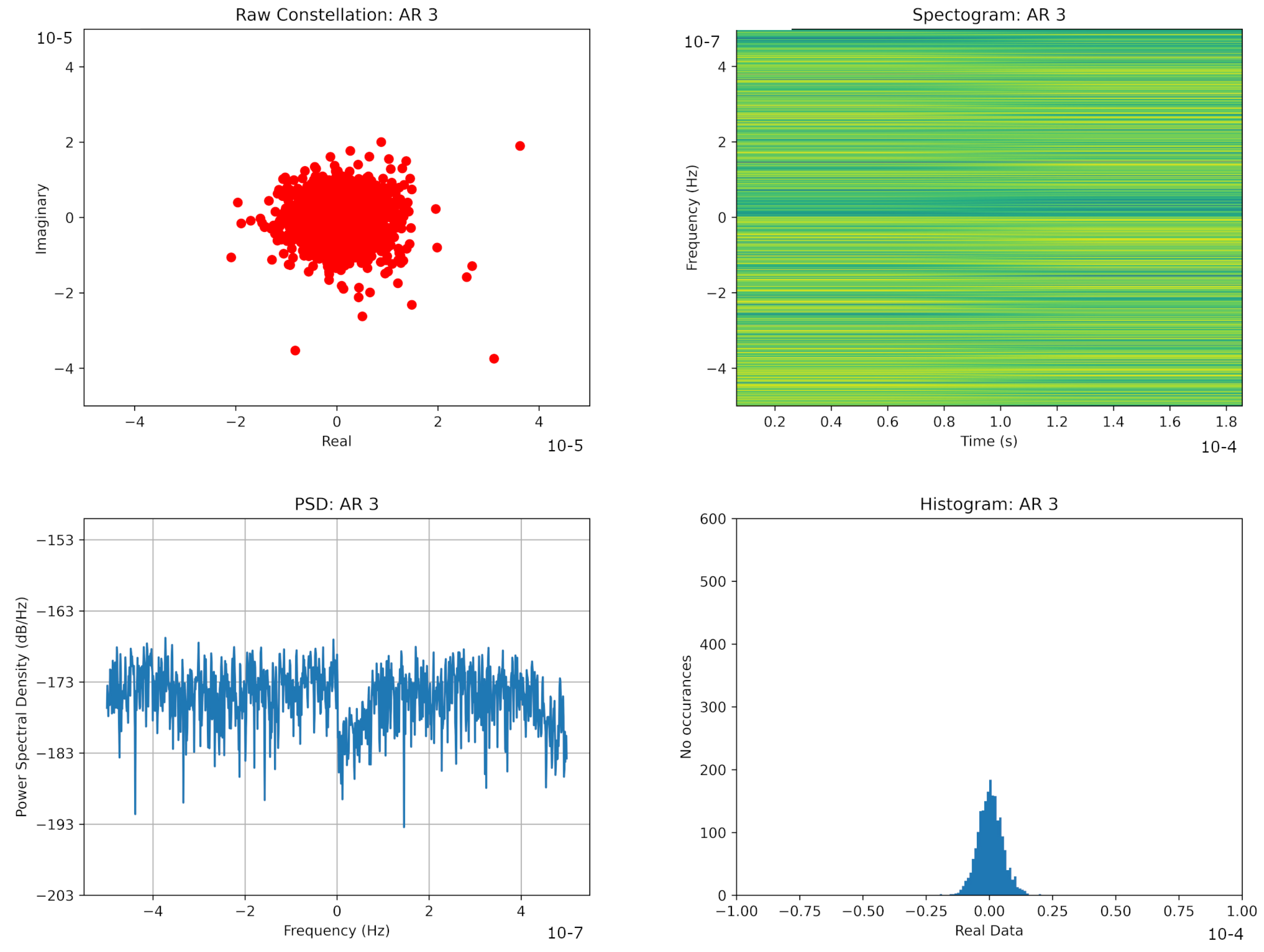
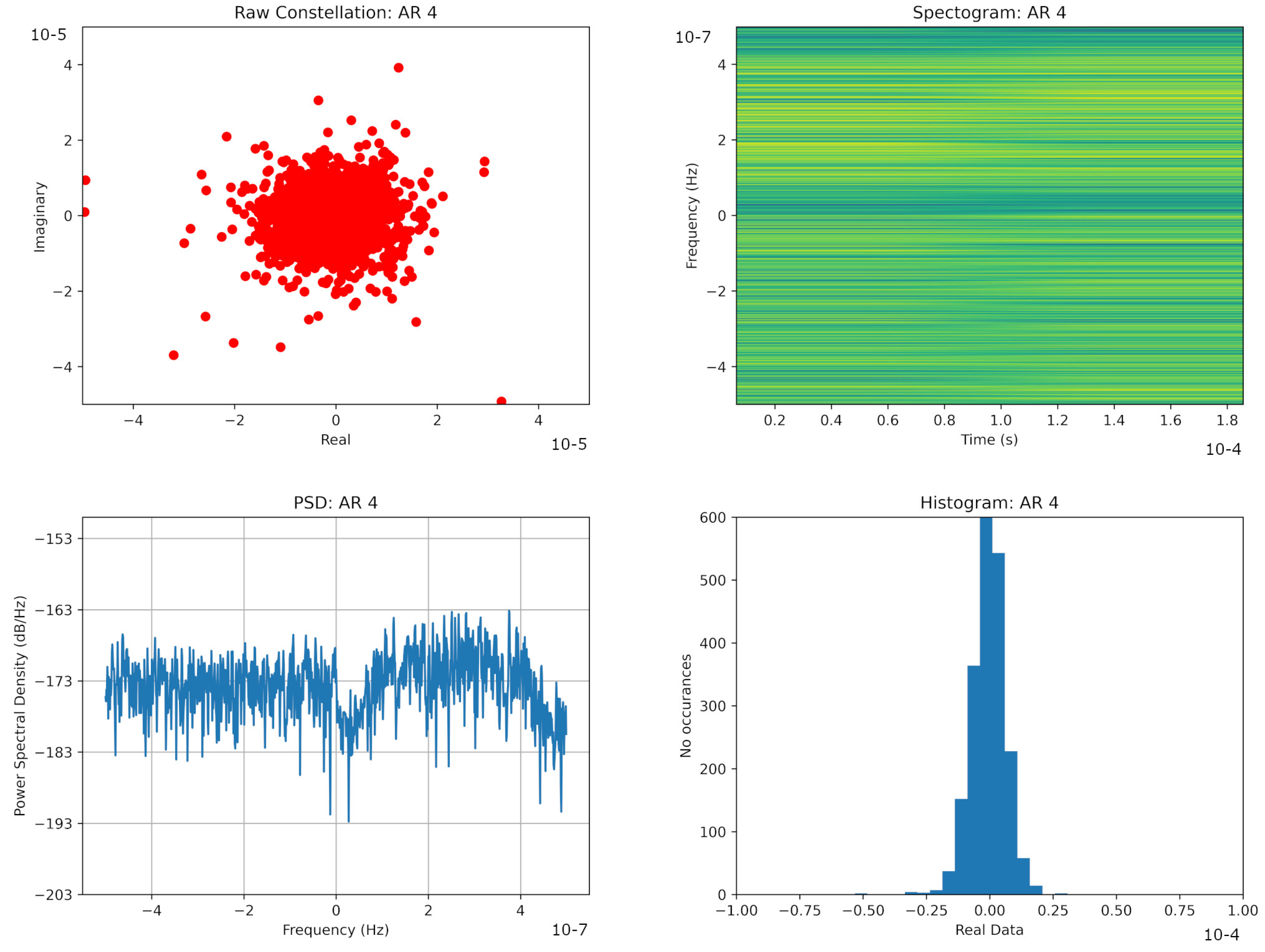
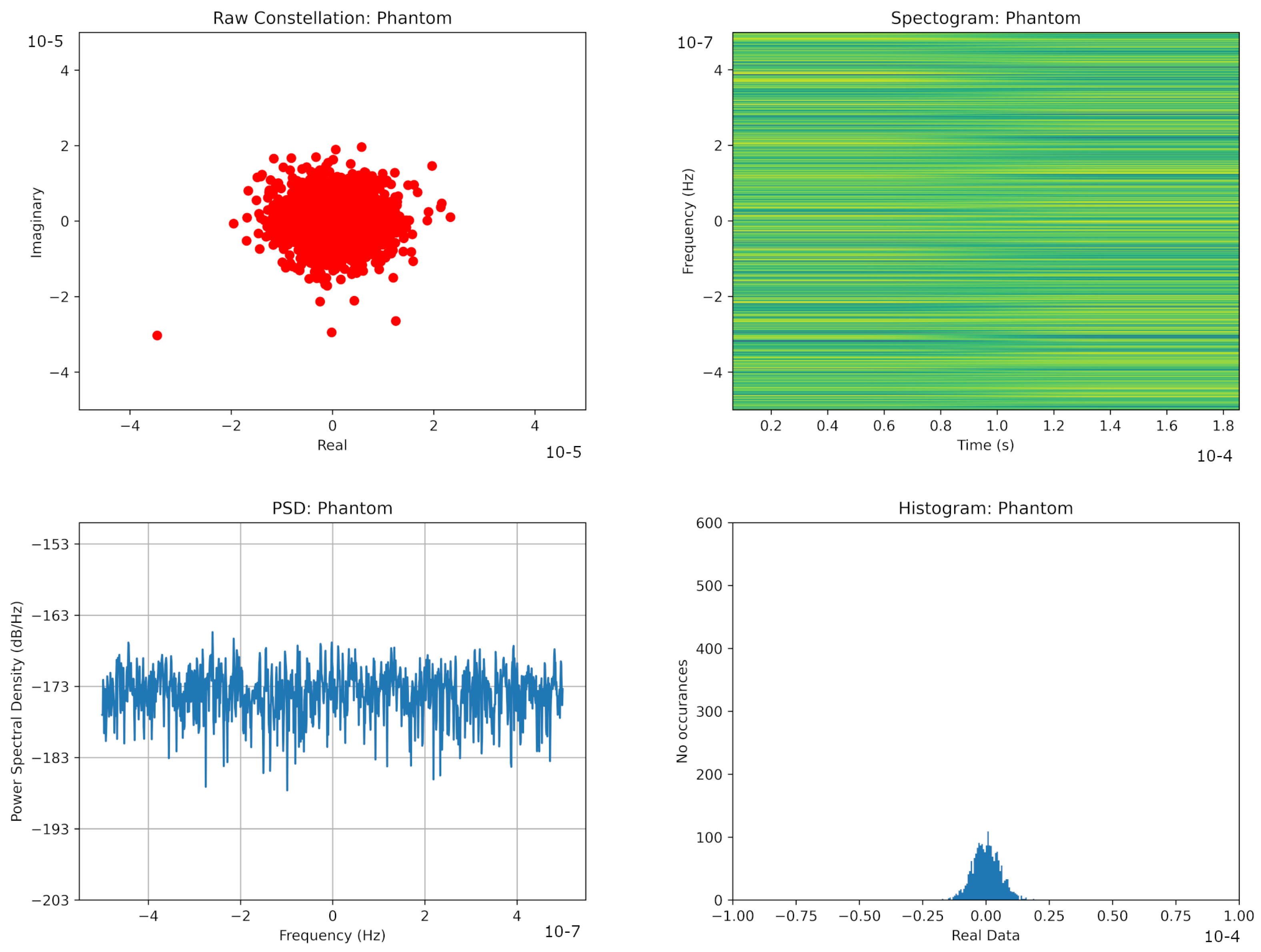
2.2.1. Raw IQ Data and Histogram
2.2.2. Power Spectral Density
2.2.3. Spectrogram
2.3. Image Representation
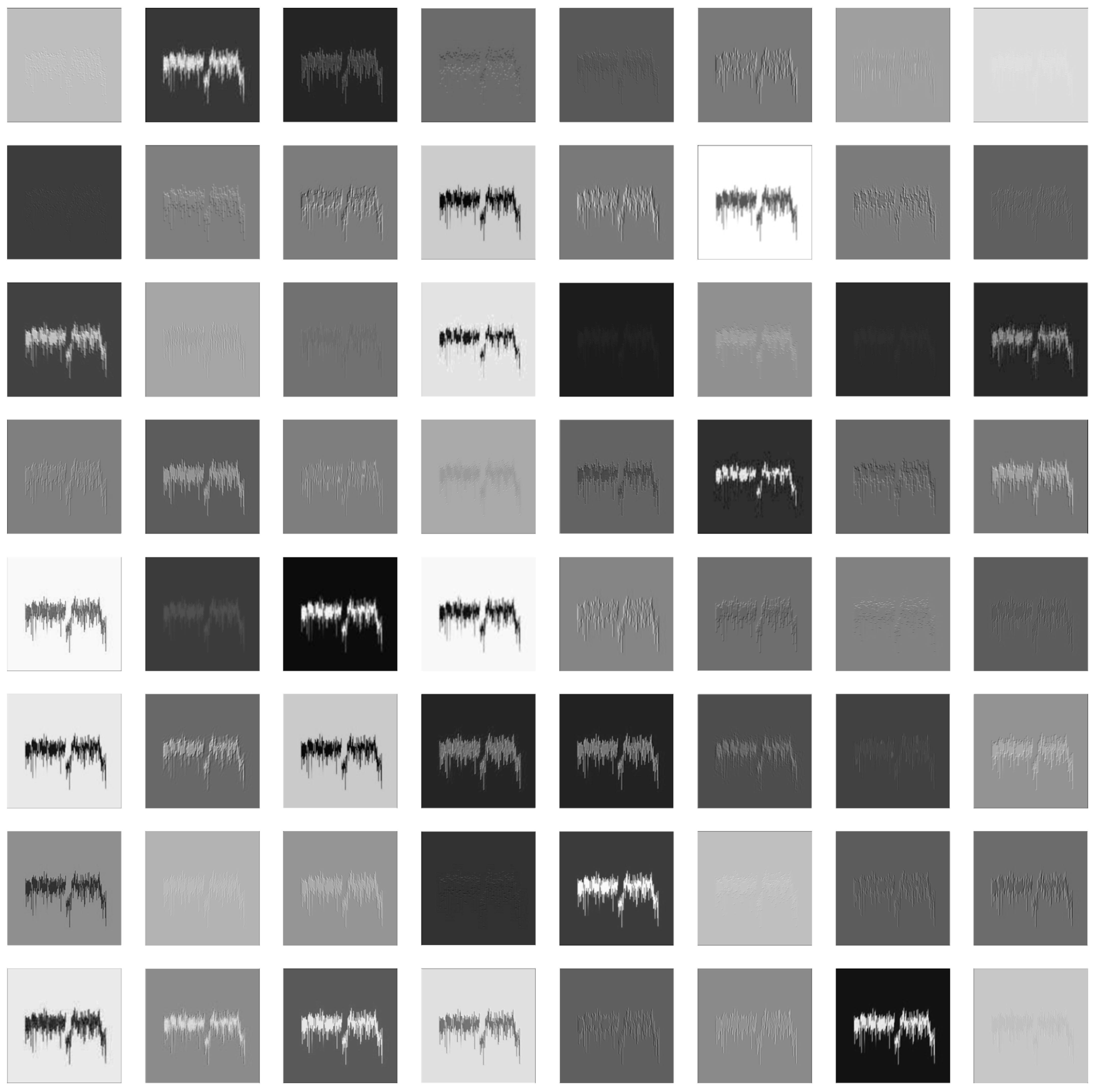
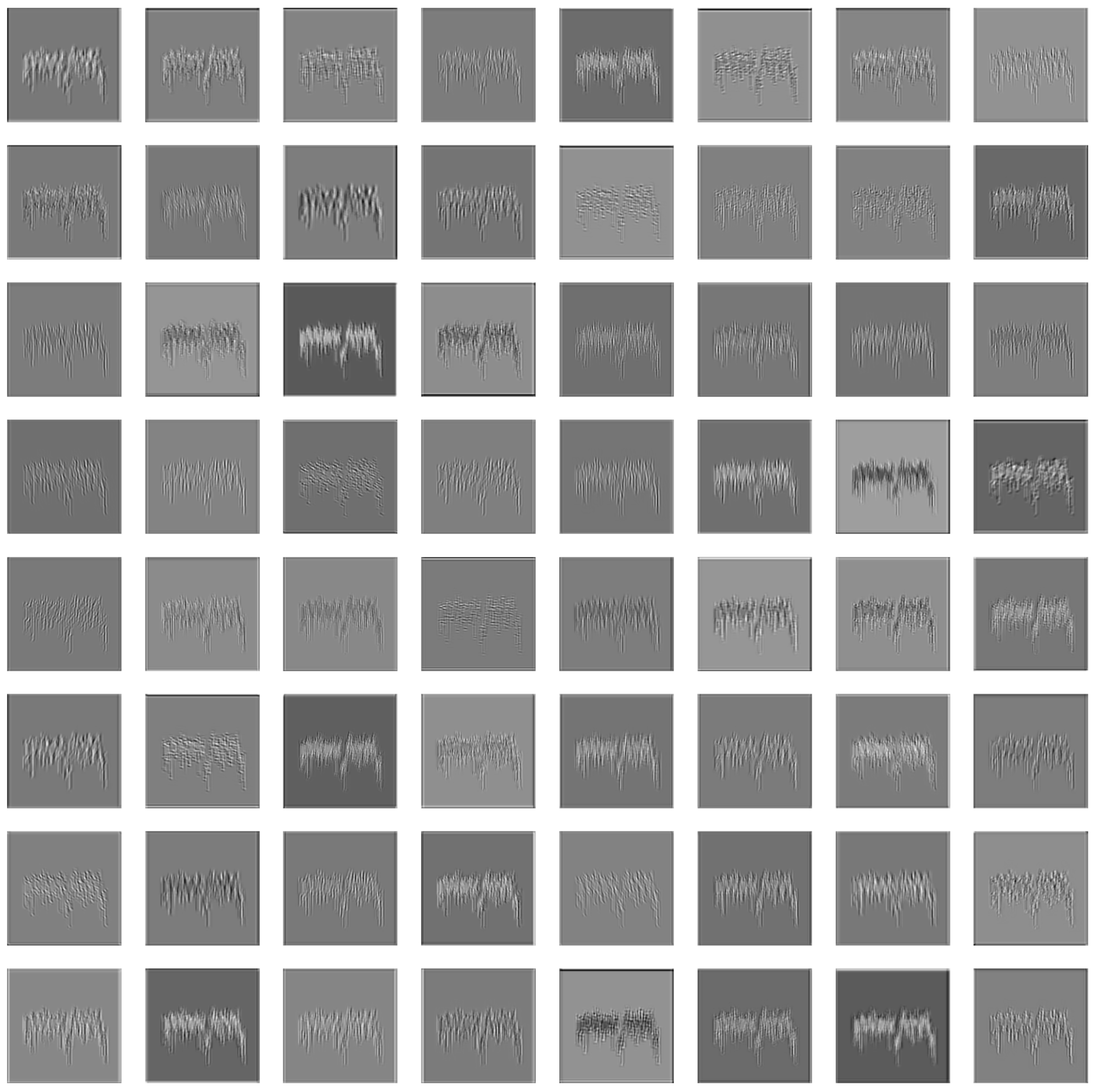
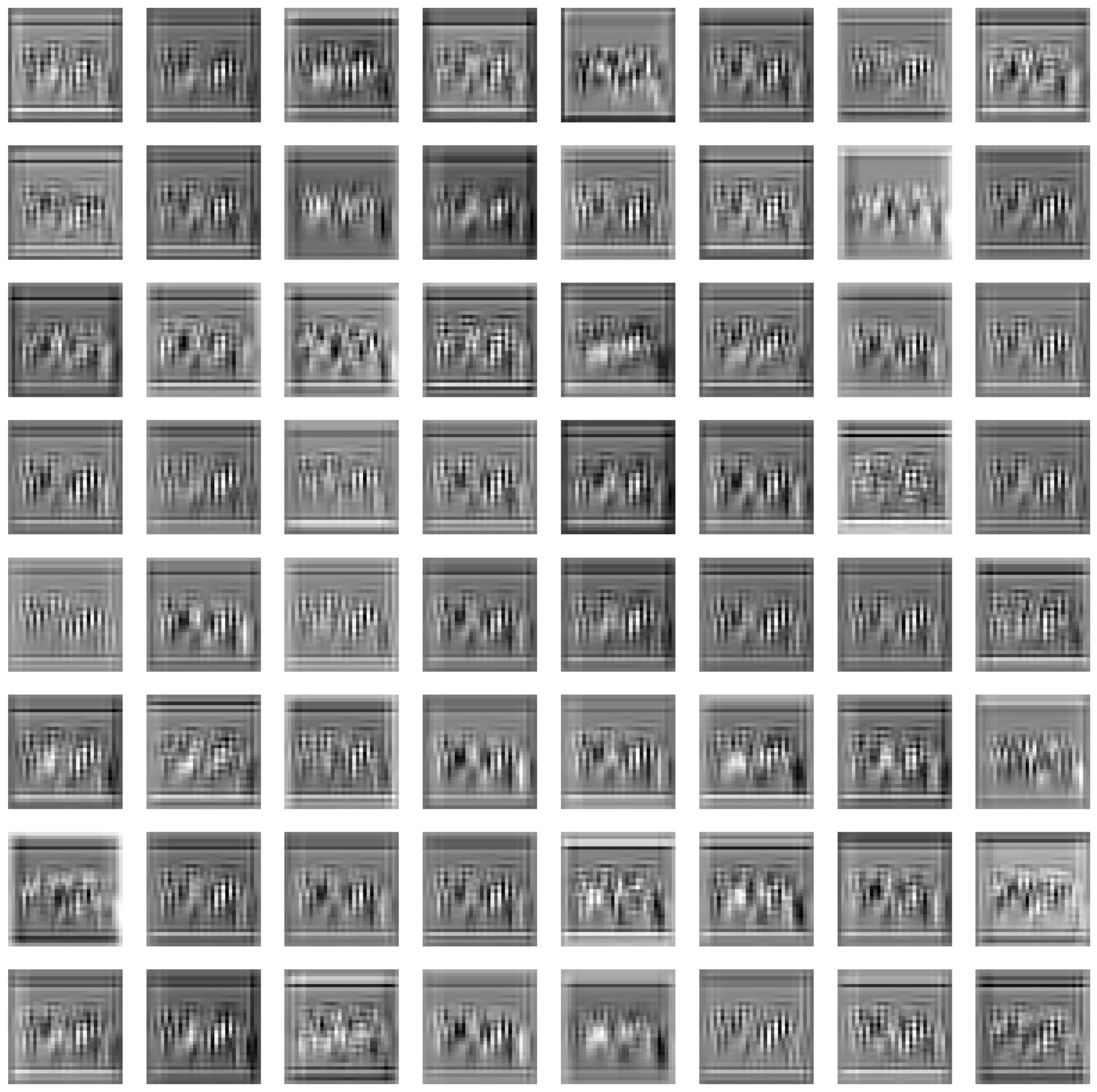
2.4. CNN Feature Extraction
2.5. Machine Learning Classifier Logistic Regression
2.6. Cross Validation
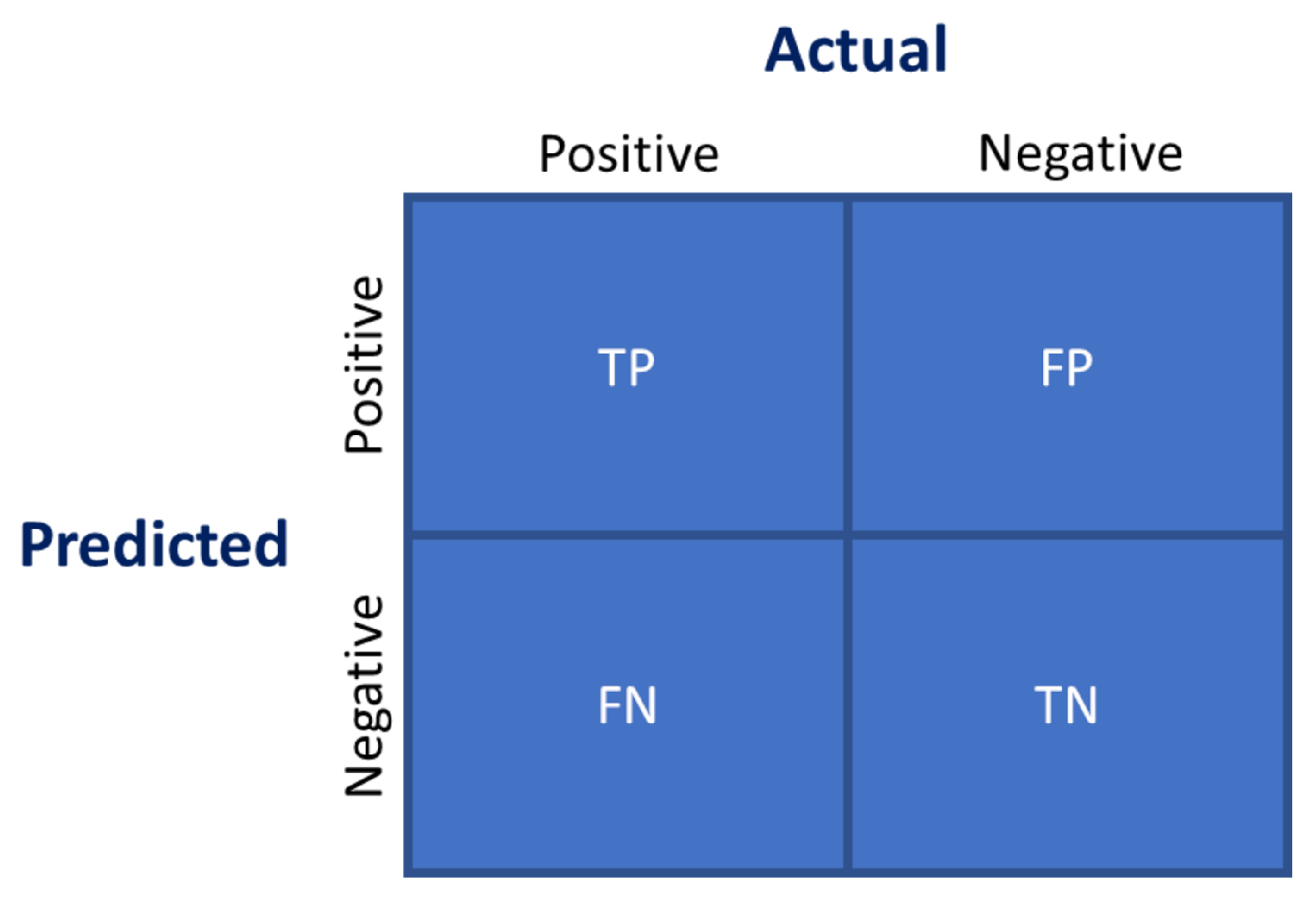
2.7. Performance Evaluation
3. Results
3.1. CNN Feature Extraction
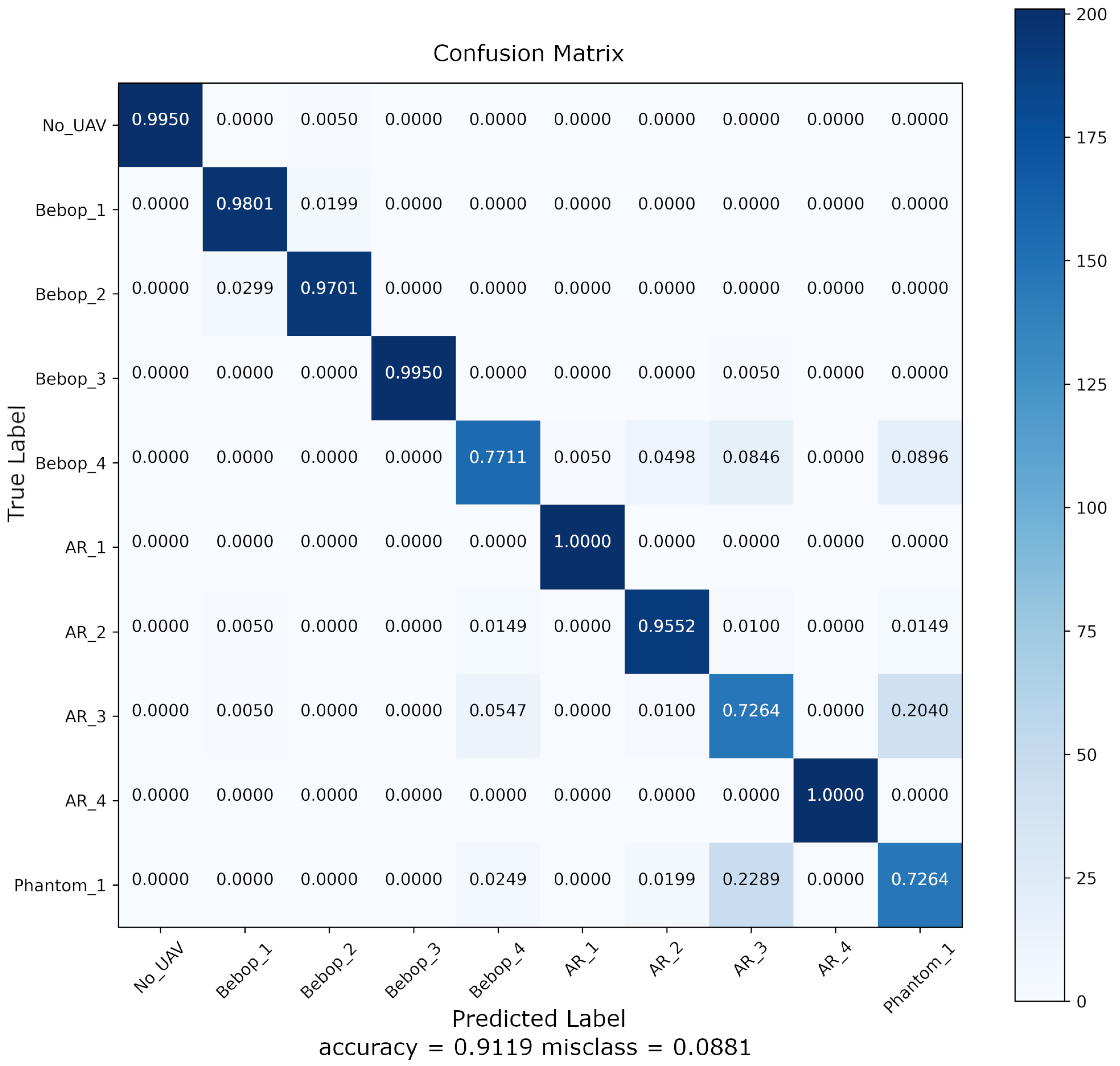
3.2. Classifier Results
3.2.1. Cross Validation Training/Test Data
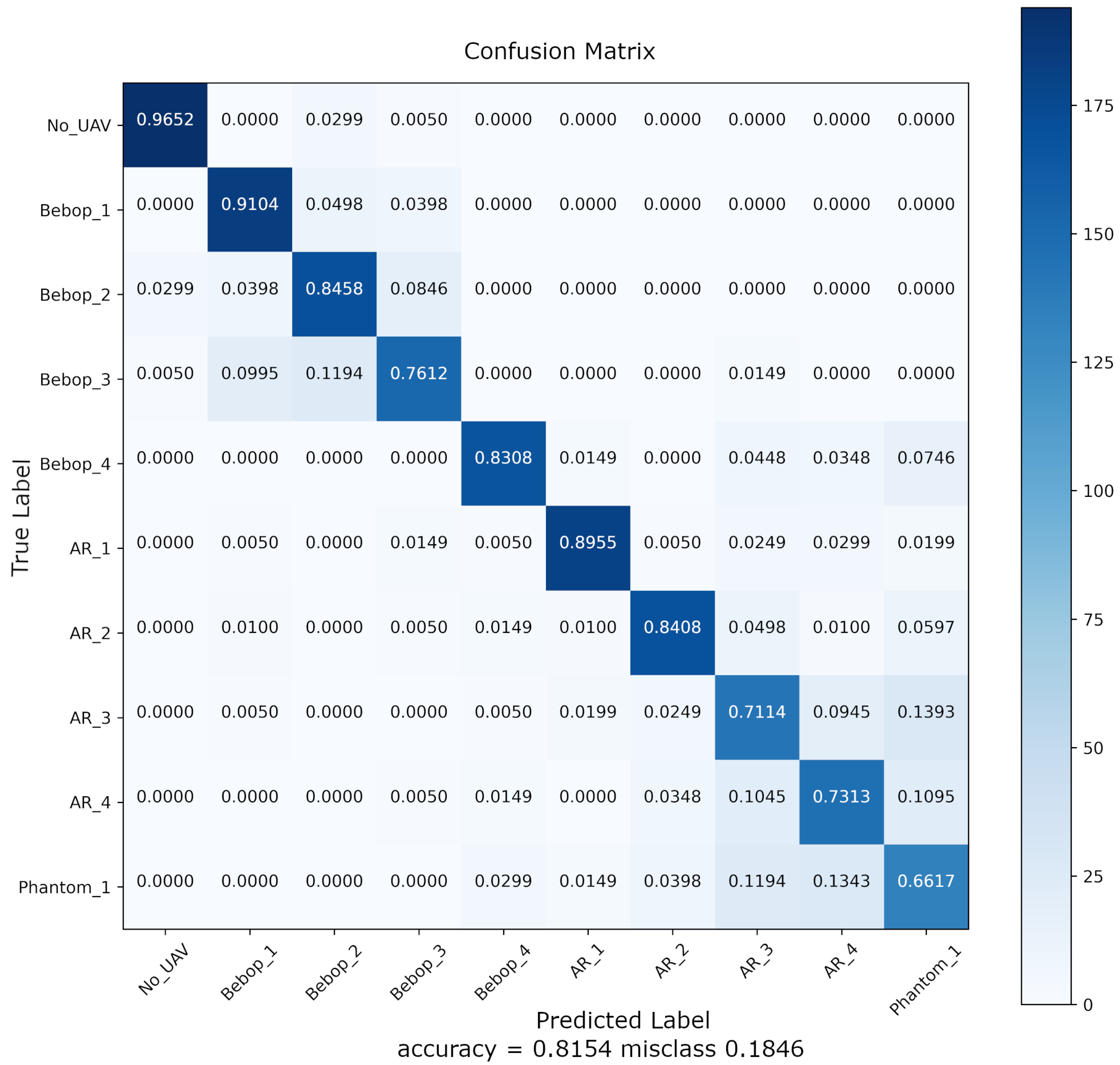
3.2.2. Hold-Out Evaluation Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khawaja, W.; Guvenc, I.; Matolak, D.; Fiebig, U.C.; Schneckenberger, N. A Survey of Air-to-Ground Propagation Channel Modeling for Unmanned Aerial Vehicles. IEEE Commun. Surv. Tutor. 2018, 21, 2361–2391. Available online: http://xxx.lanl.gov/abs/1801.01656 (accessed on 26 November 2020). [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Drone Industry Insights. The Drone Market Report 2020–2025; Technical Report; Drone Industry Insights: Hamburg, Germany, 2020. [Google Scholar]
- Harriss, L.; Mir, Z. Misuse of Civilian Drones. PostNote. 2020. Available online: https://post.parliament.uk/research-briefings/post-pn-0610/ (accessed on 27 November 2020).
- Rubens, T. Drug-Smuggling Drones: How Prisons Are Responding to the Airborne Security Threat. IFSEC Global. 2018. Available online: https://www.ifsecglobal.com/drones/drug-smuggling-drones-prisons-airborne-security-threat/ (accessed on 8 March 2021).
- Braun, T. The Threat of Weaponized Drone Use by Violent Non-State Actors. Technical Report; Wild Blue Yonder, United States Air Force. 2020. Available online: https://www.airuniversity.af.edu/Wild-Blue-Yonder/Article-Display/Article/2344151/miniature-menace-the-threat-of-weaponized-drone-use-by-violent-non-state-actors/ (accessed on 15 December 2020).
- Milmo, C. Drone Terror Attack by Jihadists in Britain is ‘Only a Matter of Time’, Security Sources Warn. i News. 2017. Available online: https://inews.co.uk/news/uk/drone-terror-attack-jihadists-britain-matter-time-security-sources-warn-89904 (accessed on 14 December 2020).
- Crown. UK Counter-Unmanned Aircraft Strategy CP 187. Technical Report; 2019. Available online: https://www.gov.uk/government/publications/uk-counter-unmanned-aircraft-strategy (accessed on 26 November 2020).
- Mezei, J.; Fiaska, V.; Molnar, A. Drone sound detection. In Proceedings of the CINTI 2015—16th IEEE International Symposium on Computational Intelligence and Informatics, Budapest, Hungary, 19–21 November 2015; pp. 333–338. [Google Scholar] [CrossRef]
- Schumann, A.; Sommer, L.; Klatte, J.; Schuchert, T.; Beyerer, J. Deep cross-domain flying object classification for robust UAV detection. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance, AVSS 2017, Lecce, Italy, 29 August–1 September 2017. [Google Scholar] [CrossRef]
- Busset, J.; Perrodin, F.; Wellig, P.; Ott, B.; Heutschi, K.; Rühl, T.; Nussbaumer, T. Detection and tracking of drones using advanced acoustic cameras. In Proceedings of the Unmanned/Unattended Sensors and Sensor Networks XI; and Advanced Free-Space Optical Communication Techniques and Applications, Toulouse, France, 24 September 2015; Volume 9647, p. 96470F. [Google Scholar] [CrossRef]
- Andraši, P.; Radišić, T.; Muštra, M.; Ivošević, J. ScienceDirect Night-time Detection of UAVs using Thermal Infrared Camera. Transp. Res. Procedia 2017, 28, 183–190. [Google Scholar] [CrossRef]
- Ganti, S.R.; Kim, Y. Implementation of detection and tracking mechanism for small UAS. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems, ICUAS, Arlington, VA, USA, 7–10 June 2016; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2016; pp. 1254–1260. [Google Scholar] [CrossRef]
- Hu, C.; Wang, Y.; Wang, R.; Zhang, T.; Cai, J.; Liu, M. LETTER. An improved radar detection and tracking method for small UAV under clutter environment. Sci. China Inf. Sci. 2019, 62, 3. [Google Scholar] [CrossRef]
- Measures, D.C. Domestic Drone Countermeasures. We Measure Everything About Home Stuffs. 2020. Available online: https://www.ddcountermeasures.com/products.html (accessed on 18 November 2020).
- Teh, B.P. RF Techniques for Detection, Classification and Location of Commercial Drone Controllers. In Proceedings of the KeySight Technologies, Aerospace Defense Symposium, Malaysia, 2017; Available online: https://tekmarkgroup.com/eshop/image/catalog/Application/AEROSPACE/Paper-5_Techniques-for-Detection-Location-of-Commercial-Drone-Controllers_2017-Malaysia-AD-Symposium.pdf (accessed on 18 November 2020).
- Nguyen, P.; Ravindranathan, M.; Nguyen, A.; Han, R.; Vu, T. Investigating cost-effective RF-based detection of drones. In Proceedings of the 2nd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Singapore, 26 June 2016; pp. 17–22. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Detection and classification of UAVs using RF fingerprints in the presence of interference. IEEE Open J. Commun. Soc. 2019, 1, 60–76. Available online: http://xxx.lanl.gov/abs/1909.05429 (accessed on 18 November 2020). [CrossRef]
- Huang, X.; Yan, K.; Wu, H.C.; Wu, Y. Unmanned Aerial Vehicle Hub Detection Using Software-Defined Radio. In Proceedings of the 2019 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Jeju, Korea, 5–7 June 2019. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, C.; Cai, Z.; Shi, M.; Du, X.; Guizani, M. Classification of Small UAVs Based on Auxiliary Classifier Wasserstein GANs. In Proceedings of the 2018 IEEE Global Communications Conference, GLOBECOM 2018—Proceedings, Abu Dhabi, United Arab Emirates, 9–13 December 2018. [Google Scholar] [CrossRef]
- Al-Sa’d, M.; Allahham, M.S.; Mohamed, A.; Al-Ali, A.; Khattab, T.; Erbad, A. DroneRF dataset: A dataset of drones for RF-based detection, classification, and identification. Data Brief 2019, 26, 104313. [Google Scholar] [CrossRef]
- Al-Sa’d, M.F.; Al-Ali, A.; Mohamed, A.; Khattab, T.; Erbad, A. RF-based drone detection and identification using deep learning approaches: An initiative towards a large open source drone database. Future Gener. Comput. Syst. 2019, 100, 86–97. [Google Scholar] [CrossRef]
- Swinney, C.J.; Woods, J.C. Unmanned Aerial Vehicle Flight Mode Classification using Convolutional Neural Network and Transfer Learning. In Proceedings of the 2020 16th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 29 December 2020; pp. 83–87. [Google Scholar]
- Long, H.; Sang, L.; Wu, Z.; Gu, W. Image-based abnormal data detection and cleaning algorithm via wind power curve. IEEE Trans. Sustain. Energy 2020, 11, 938–946. [Google Scholar] [CrossRef]
- Tandiya, N.; Jauhar, A.; Marojevic, V.; Reed, J.H. Deep Predictive Coding Neural Network for RF Anomaly Detection in Wireless Networks. In Proceedings of the 2018 IEEE International Conference on Communications Workshops, ICC Workshops 2018—Proceedings, Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. Available online: http://xxx.lanl.gov/abs/1803.06054 (accessed on 30 March 2020). [CrossRef]
- O’Shea, T.J.; Roy, T.; Erpek, T. Spectral detection and localization of radio events with learned convolutional neural features. In Proceedings of the 25th European Signal Processing Conference, EUSIPCO 2017, Kos, Greece, 29–30 August 2017; pp. 331–335. [Google Scholar] [CrossRef]
- Feng, X.; Jiang, Y.; Yang, X.; Du, M.; Li, X. Computer vision algorithms and hardware implementations: A survey. Integration 2019, 69, 309–320. [Google Scholar] [CrossRef]
- Godet, V.; Durham, M. User Guide. Bebop Drone. 2009. Available online: https://www.parrot.com/files/s3fs-public/firmware/bebop-drone_user-guide_uk_v.3.4_0.pdf (accessed on 13 December 2020).
- Kindervater, K.H. The emergence of lethal surveillance. Secur. Dialogue 2016, 47, 223–238. [Google Scholar] [CrossRef]
- Instruments, N. USRP-2943-NI. 2020. Available online: https://www.ni.com/en-gb/support/model.usrp-2943.html (accessed on 7 December 2020).
- Lutus, P. Software-Defined Radios. Arachnoid. 2018. Available online: https://arachnoid.com/software_defined_radios/ (accessed on 7 December 2020).
- Kumar, A.; Chari, M. Efficient Audio Noise Reduction System Using Butterworth Chebyshev and Elliptical filter. Int. J. Multimed. Ubiquitous Eng. 2017, 12, 225–238. [Google Scholar] [CrossRef]
- Smith, J.O. Spectral Audio Signal Processing 2011 Edition. Available online: http://ccrma.stanford.edu/~jos/sasp/ (accessed on 7 December 2020).
- Selesnick, I. Short Time Fourier Transform. 2005. Available online: https://cnx.org/contents/qAa9OhlP@2.44:PmFjFoIu@5/Short-Time-Fourier-Transform (accessed on 7 December 2020).
- Thota, N.B.; Umma Reddy, D. Improving the Accuracy of Diabetic Retinopathy Severity Classification with Transfer Learning. In Proceedings of the 2020 IEEE 63rd International Midwest Symposium on Circuits and Systems (MWSCAS), Springfield, MA, USA, 9–12 August 2020; pp. 1003–1006. [Google Scholar] [CrossRef]
- Jayakumari, C.; Lavanya, V.; Sumesh, E.P. Automated Diabetic Retinopathy Detection and classification using ImageNet Convolution Neural Network using Fundus Images. In Proceedings of the 2020 International Conference on Smart Electronics and Communication (ICOSEC), Tiruchirappalli, India, 10–12 September 2020; pp. 577–582. [Google Scholar] [CrossRef]
- Kaur, T.; Gandhi, T.K. Automated brain image classification based on VGG-16 and transfer learning. In Proceedings of the 2019 International Conference on Information Technology, ICIT 2019, Bhubaneswar, India, 19–21 December 2019; pp. 94–98. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. Available online: http://xxx.lanl.gov/abs/1512.03385 (accessed on 15 February 2021). [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. ICLR. 2015. Available online: http://xxx.lanl.gov/abs/1409.1556v6 (accessed on 26 March 2020).
- Daniel, J.; Martin, J.H. Logistic Regression. In Speech and Language Processing; 2019; Chapter 5; pp. 1–19. Available online: https://web.stanford.edu/~jurafsky/slp3/5.pdf (accessed on 10 December 2020).
- Al-Masri, A. What Are Overfitting and Underfitting in Machine Learning. Towards Data Science 2019. Available online: https://towardsdatascience.com/what-are-overfitting-and-underfitting-in-machine-learning-a96b30864690 (accessed on 23 June 2020).
- Sanjay, M. Why and How to Cross Validate a Model? Towards Data Science. 2018. Available online: https://towardsdatascience.com/why-and-how-to-cross-validate-a-model-d6424b45261f (accessed on 23 June 2020).
- Brownlee, J. A Gentle Introduction to k-Fold Cross-Validation. Machine Learning Mastery. 2019. Available online: https://machinelearningmastery.com/k-fold-cross-validation/ (accessed on 23 June 2020).
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer: New York, NY, USA; Heidelberg, Germany; Dordrecht, The Netherlands; London, UK, 2017; p. 184. [Google Scholar]
- Jouppi, N. Google Supercharges Machine Learning Tasks with TPU Custom Chip. Google. 2016. Available online: https://cloud.google.com/blog/products/ai-machine-learning/google-supercharges-machine-learning-tasks-with-custom-chip (accessed on 8 March 2021).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | UAV Type | Mode |
|---|---|---|
| 1 | No UAV | N/A |
| 2 | Parrot Bebop | Switched on and connected to controller |
| 3 | Parrot Bebop | Hovering automatically with no controller commands |
| 4 | Parrot Bebop | Flying without video transmission |
| 5 | Parrot Bebop | Flying with video transmission |
| 6 | Parrot AR | Switched on and connected to controller |
| 7 | Parrot AR | Hovering automatically with no controller commands |
| 8 | Parrot AR | Flying without video transmission |
| 9 | AR | Flying with video transmission |
| 10 | DJI Phantom 3 | Switched on and connected to controller |
| Metric | Raw | Spec | PSD | Hist |
|---|---|---|---|---|
| Acc | 45.3 (+/−1.1) | 83.8 (+/−1.1) | 92.3 (+/−0.3) | 37.0 (+/−0.2) |
| F1 | 45.1 (+/−1.1) | 83.7 (+/−1.2) | 92.3 (+/−0.3) | 36.8 (+/−0.2) |
| Mode | Raw | Spec | PSD | Hist |
|---|---|---|---|---|
| No UAV | 51 | 97 | 100 | 49 |
| Bebop Mode 1 | 26 | 88 | 97 | 26 |
| Bebop Mode 2 | 29 | 83 | 97 | 18 |
| Bebop Mode 3 | 90 | 79 | 100 | 79 |
| Bebop Mode 4 | 23 | 87 | 83 | 17 |
| AR Mode 1 | 23 | 92 | 100 | 21 |
| AR Mode 2 | 31 | 86 | 94 | 14 |
| AR Mode 3 | 20 | 69 | 71 | 18 |
| AR Mode 4 | 99 | 72 | 100 | 100 |
| Phantom Mode 1 | 35 | 64 | 71 | 25 |
| Metric | Raw | Spec | PSD | Hist |
|---|---|---|---|---|
| Acc | 43.1 | 81.5 | 91.2 | 36.7 |
| F1 | 42.9 | 81.7 | 91.2 | 36.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
Crown Copyright © 2021. This material is licensed under the Open Government Licence v3.0 except where otherwise stated. To view this licence, visit (http://www.nationalarchives.gov.uk/doc/open-government-licence/version/3/).
Share and Cite
Swinney, C.J.; Woods, J.C. Unmanned Aerial Vehicle Operating Mode Classification Using Deep Residual Learning Feature Extraction. Aerospace 2021, 8, 79. https://doi.org/10.3390/aerospace8030079
Swinney CJ, Woods JC. Unmanned Aerial Vehicle Operating Mode Classification Using Deep Residual Learning Feature Extraction. Aerospace. 2021; 8(3):79. https://doi.org/10.3390/aerospace8030079
Chicago/Turabian StyleSwinney, Carolyn J., and John C. Woods. 2021. "Unmanned Aerial Vehicle Operating Mode Classification Using Deep Residual Learning Feature Extraction" Aerospace 8, no. 3: 79. https://doi.org/10.3390/aerospace8030079
APA StyleSwinney, C. J., & Woods, J. C. (2021). Unmanned Aerial Vehicle Operating Mode Classification Using Deep Residual Learning Feature Extraction. Aerospace, 8(3), 79. https://doi.org/10.3390/aerospace8030079