1. Introduction
In recent years, with the deepening of space exploration, many space operation tasks need to be completed, such as satellite acquisition, cabin docking and assembly, load handling, and so on. In this process, the active object inevitably impacts on the operation target. Unlike the ground environment, the space target is located in a weightless environment [
1]. It moves freely under the reaction force and moment generated during contact and impact. Sometimes, a small external impact influences the whole system significantly, affecting its posture and stability and even causing the failure of the capture task. Therefore, it is necessary to study the impact between space operation objects, which will lay the foundation for controlling or suppressing the impact.
In the process of contact and impact, the capture device contacts directly with the target load, whose structural characteristics have a direct influence on the capture task. Capture devices can be divided into rigid capture devices, flexible capture devices, and rigid flexible coupling capture devices, according to their contact characteristics [
2]. A capture device with rigid parts is called a rigid capture device, which has the advantages of a simple structure design, relatively mature technology, easy control, and high connection rigidity [
3]. A device using flexible parts for capture is called a flexible capture device. Compared to the rigid capture device, the impact of the flexible capture device is smaller due to the contact of flexible parts. Meanwhile, the flexible capture device can easily achieve a wide range of capture and has a strong tolerance. These characteristics reduce the accuracy requirements of the relative pose between the capture device and the target load. The flexible capture device mainly contains three flexible wire ropes, which can realize flexible capture and rigid connection at the same time, and the operation is relatively simple. It has been widely used in the typical space manipulators, such as the SSRMS [
4] in Canada and the JEM Remote Manipulator System (JEMRMS) [
5] in Japan. It is more suitable for a task with a noncooperative target, such as space debris cleaning and waste satellite recovery tasks [
6]. Through reasonable structural design, it perfectly inherits the advantages of the rigid capture device such as a high connection stiffness, and owns unique advantages such as a strong tolerance and a small impact. The reduction of impact will reduce the influence of external impact on the combined system, increasing its stability and decreasing the possibility of capture failure.
An impact between two objects is a complex phenomenon that occurs in a very short period when two or more bodies collide. During the impact period, a high force is applied, causing a quick change of the objects’ velocity and kinematic restoration, release, and transfer to another object of kinematic energy. To study this, the impact period is divided into a compression phase and a restitution phase [
7]. When the objects start to contact, the compression phase begins. This phase terminates with the normal relative velocity of the contact objects going to zero. Then, the restitution phase begins until the objects separate.
There are two different approaches for impact analysis. The first approach is called impulse–momentum or discrete method, which assumes that the interaction between the objects occurs in a short time and the outside force can be ignored. To simulate the process of energy transfer and dissipation, a restitution coefficient is employed, which can be defined by Newton’s model [
8] and Poisson’s model [
9]. However, these methods have been confined primarily to an impact between rigid bodies [
10]. The situation is complicated in some more general cases that involve multiple contacts and intermittent contact.
Therefore, the continuous method was proposed since the interaction forces act continuously during the impact. There are three important continuous impact models based on the penetration depth [
9]: Kelvin–Voigt model, Hertz model, and Hunt–Crossley model. The Kelvin–Voigt is the simplest model, which simulates the force with a parallel spring-damper element [
11]. Meanwhile, there are three common problems with this model: first, the damping force is not zero upon initial contact; second, the forces between the objects exhibit tension property before leaving contact; third, determining the coefficient of restitution depends on experience [
12,
13]. The Hertz model [
14,
15] increased the accuracy of the stiffness portion of the impact force by approximating the stress distribution in the contact region based on the theory of elasticity. Based on this model, Liu [
16] and Qiao [
17] studied the dynamics of a space robot when capturing a floating target. Kosenko [
18] proposed an invariant form for the force function, which depends on the geometric properties of an intersection for undeformed rigid bodies’ volumes; therefore, this model was called volumetric model. It can realize the computational reduction. However, the Hertz model is still limited to an impact with elastic deformation and its original form does not include damping. To overcome the disadvantages of the Kelvin–Voigt model and to retain the advantages of the Hertz model, Hunt [
19] proposed an alternative model for energy dissipation, which includes a non-linear damping term. From Hunt and Crossley’s model, many other nonlinear damping models were proposed, such as that of Gonthier [
20] and Zhiying–Qishao [
21]. However, the only difference between them was the definition of the damping parameter. Recently, Andre [
13] extended Gonthier et al.’s work by proposing an alternate damping model based on material properties. The advantage was that the damping factor was a constant internal material property, which depended only on the material and not on the impact velocity or the contact geometry.
All the literature surveyed above considered an ideal environment, which ignores the interference of friction. However, when the impact occurs at a low velocity, the friction cannot be ignored. As a result, this paper introduces a friction parameter into the nonlinear model, extending it to the normal condition. Though the influence of friction does not exist in real space capture task, it cannot be eliminated or ignored in ground experiment. To fit the condition of ground experiment, a friction parameter was introduced to the impact model. Moreover, based on the experimental testbed, some experiments were carried out, and the experimental data were compared with theoretical result, which can verify the advantage of the improved nonlinear model.
The research of discrete impact dynamics and continuous impact dynamics focuses on the impact between rigid bodies but does not consider the flexible impact between flexible objects such as flexible wire ropes. Aiming at the impact problem of the flexible wire rope, the impact model becomes very complex. The discrete impact dynamics can only be successfully applied for flexible wire ropes when the duration of impact, the change rule of impact force with time, the contact velocity and the depth of the contact zone can be calculated. These parameters cannot always be calculated especially when the dynamic model is very complex, so continuous impact dynamics is more suitable for impact modeling of flexible ropes than discrete impact dynamics. It is necessary to modify the continuous impact model with the help of the dynamic model of the flexible wire rope. For the dynamic modeling of a flexible wire rope, Russel et al. [
22] regarded the flexible wire rope as a discrete model composed of several rigid rods, which had a concentrated mass and were connected by pins. Aiming at the motion of tethered satellite, Carter et al. [
23] used the lumped mass model to divide the tethered satellite into several small segments. The mass of each segment was concentrated at the end point, and the adjacent particles were connected by a retractable spring damper. Tan et al. [
24] proposed a plane bending flexible wire rope model based on a torsional damping spring. Through adding a driving force at the end of the flexible wire rope, they established the force and torque balance equations of the system. This method simplified the modeling process of a flexible wire rope, but the tensile characteristics of flexible wire rope were not considered. Pan et al. [
25] discretized the flexible wire rope into a group of element beam models. The adjacent elements were connected by six-dimensional force/moment to fully consider the deformation characteristics of the rope, such as tension, shear, bending, and torsion. Based on this, the relation between the force and relative displacement of each discrete segment was established. The existing research on the impact modeling of a flexible wire rope is scarce, and most research works directly regard the contact action with a flexible wire rope as a collision pulse or known force [
26,
27]. With the establishment of the dynamic model of a flexible wire rope in [
25,
28], the Hertz contact theory was directly used to obtain the impact force model. However, because the impact between an object and a flexible wire rope is accompanied by large flexible geometric deformations and local micro deformations of the flexible wire rope, the expression results of this method are insufficient. Besides, the existing studies about continuous impact modeling of a flexible wire rope mainly consider the impact between two single bodies. This kind of method rely on the initial position and velocity of the two objects, and there is a conflict between the calculation speed and calculation accuracy. Meanwhile, the existing related studies have offered few clear standards on choosing a model to describe the impact of a flexible wire rope.
According to the above investigation, the current research on the impact between objects is mainly divided into discrete impact dynamics and continuous impact dynamics. Discrete impact dynamics mainly depends on the classical theory of coefficient of restitution, which is simple and efficient. The dynamic model of continuous impact mainly depends on Hertz’s theory, which can display the impact force. In addition, there are few studies on the impact force model of a flexible wire rope with large flexibility at present. The existing methods of impact modeling of a flexible wire rope are mainly based on continuous impact modeling. Such methods usually assume impact between single bodies rather than multiple bodies, and there is a conflict between calculation speed and accuracy. The existing research also offers few clear standards on what model to choose for impact modeling of flexible rope wires. As a result, how to derive the impact force model of a flexible wire rope based on the existing contact impact theory needs further research.
This paper is organized as follows. In
Section 2, based on Zhiying and Qishao’s nonlinear model, the impact dynamic model between a grapple shaft and a rigid body is established. Then, friction is introduced into the impact dynamic model of two objects, making it close to actual impact cases. In
Section 3, the impact dynamic model between a grapple shaft and a flexible wire rope is established. In
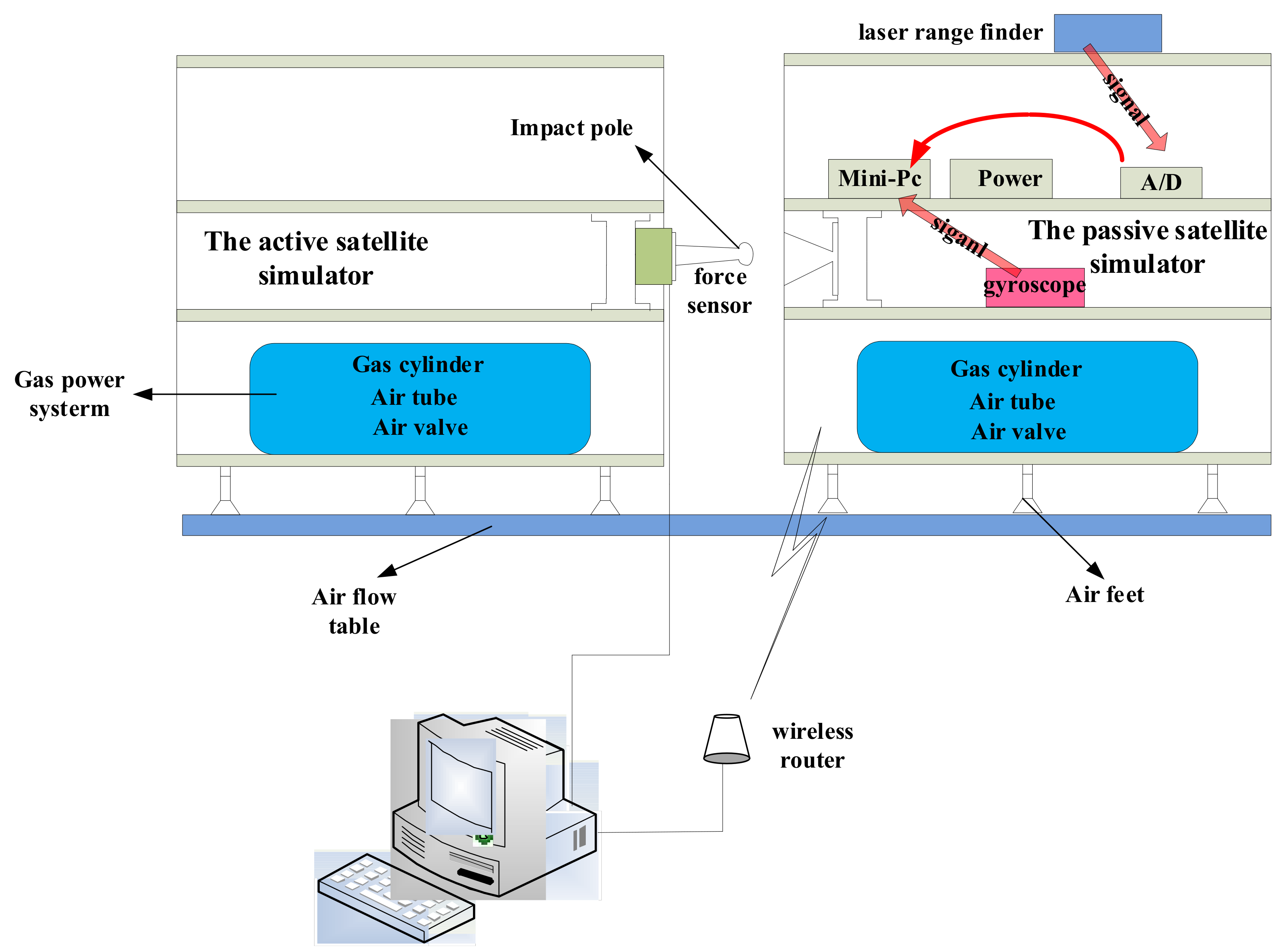
Section 4, the ground experimental testbed is first constructed, and impact experiments and simulations of the two satellite simulators are then carried out.
Section 5 is the conclusion.
3. Impact Dynamic between Grapple Shaft and Flexible Wire Rope
In this section, to study the case of a rope capture mechanism that is used in a flexible capture device, the impact dynamic model between a grapple shaft and a flexible wire rope is established. The flexible capture device can achieve a wide operating range and have strong tolerance, as well as a small impact during a space capture task, which can reduce the possibility of causing plastic deformation on the object. Therefore, flexible capture devices are widely used in actual space capture cases while a rope capture mechanism is applied in such capture devices. Because the flexible wire rope is the main executive element of the rope capture mechanism, the impact problem is essentially aimed at the impact between the flexible wire rope and the target, which is assumed to be a rigid body. Therefore, this section mainly focuses on the impact dynamic modeling of the flexible wire rope. The basic dynamic model of the flexible wire rope is first established. In this stage, the flexible wire rope is first separated into a sequence of nodes and the kinematic relation is obtained with the help of an inertial coordinate system, a fixed coordinate system, and a moving coordinate system. Then, the dynamic model of the flexible wire rope is established with Newton’s second law. Based on the dynamic model, the constraint of the space snare capture is introduced, and the modeling and analysis of the impact between the flexible wire rope and the rigid body object is achieved.
The space snare capture is mainly composed of three modules: a rope catching module, a dragging module, and a locking module, as shown in
Figure 1. The rope capture module is to capture the target and limit its free movement in space. This module is installed on the support shell and consists of a fixed ring, a rotating ring, and three flexible wire ropes. For each flexible wire rope, one end is installed on the fixed ring (called fixed point), while the other end is connected with the rotating ring and rotates with it (called moving point). When the driver drives the rotating ring to rotate, three flexible wire ropes begin to move with it, and the closed capture area gradually shrinks and finally locks the target payload. The exact capturing steps are as follows:
Step 1: The space manipulator carries the space snare capture device near the target load, locating the target load within the capture zone of the three flexible wire ropes.
Step 2: The rotating ring begins to rotate, making the capture zone shrink and the free movement of the target load is gradually limited. During this step, several impacts will occur between the target load and the flexible wire ropes.
Step 3: When the shrinking of the capture zone is finished, the target load is fixed in the center of the capture device. The position and posture of the target load will be adjusted by the dragging module. When the target load fully fits the capture device, the target load is locked by the locking module.
3.1. Dynamic Modeling of the Flexible Wire Rope
In a microgravity environment, the impact between the flexible wire rope and target becomes complex. To obtain the impact force between the grapple shaft and the flexible wire rope, it is necessary to establish a dynamic model of the flexible wire rope first.
3.1.1. Basic Motion Equation of the Flexible Wire Rope
The flexible wire rope is separated into a group of nodes connected in sequence in space. The node number is increased from one end of the rope to the other (
), and the adjacent nodes are connected by a mass-free tensile spring, which shows the tensile characteristics of the flexible wire rope, as shown in
Figure 2.
The external force on the flexible wire rope is concentrated on each node, and with the linear density through the lumped mass method, the mass of each node is determined as:
where
is the linear density of the flexible wire rope, and
and
are the cross-sectional area and original length of the
ith section on the flexible wire rope, respectively. If the mass of the flexible wire rope is evenly distributed and the length of discrete section is equal, the mass of each node can be calculated simply as follows:
where
is the total mass of the flexible wire rope.
To describe the motion state of the flexible wire rope, we establish the inertial coordinate system
, fixed coordinate system
, and moving coordinate system
. The establishment of the coordinate system is shown in
Figure 3. The moving coordinate system
can be obtained by the following steps. First, the coordinate system
overlaps with
; then, rotate the fixed coordinate system
around the
z-axis with angle
, obtaining a middle coordinate system; finally, rotate the middle coordinate system around the
-axis with angle
.
and
are used to describe the deflection and pitching motion of the flexible wire rope, respectively.
Set the rotation matrix of the dynamic coordinate system relative to the fixed coordinate system at node i as . The rotation matrix is the product of the basic rotation matrices around the z-axis and -axis.
The basic rotation matrix around the
z-axis is:
where the parameters c and s represent the operator cos and sin, respectively. The basic rotation matrix around the
-axis is:
We consider that the two rotation matrices move around the moving coordinate system
, which is not a fixed coordinate system. Therefore, the rotation matrix is the result of the product of two rotation matrices from left to right, as shown as follows:
Since
is continuously differentiable in time, its derivative can be expressed as follow [
29]:
where
is the angular velocity operator matrix, which can be obtained from Equation (17):
Let
. Since the angular velocity operator matrix is antisymmetric, we define it as follow:
Combined with Equations (18) and (19), the rotational angular velocity of the moving coordinate system
relative to the fixed system
can be obtained as follows:
The acceleration of the rotation angle can be derived from Equation (20):
Define the length vector of the
ith section on the flexible wire rope as
. Then, the velocity vector can be expressed as:
In Equation (22), the first and second terms on the right of the equation are the speed change caused by the length change and the rotation change of the discrete section, respectively.
By deriving Equation (22), the acceleration vector of the
ith section on the flexible wire rope can be obtained as follows:
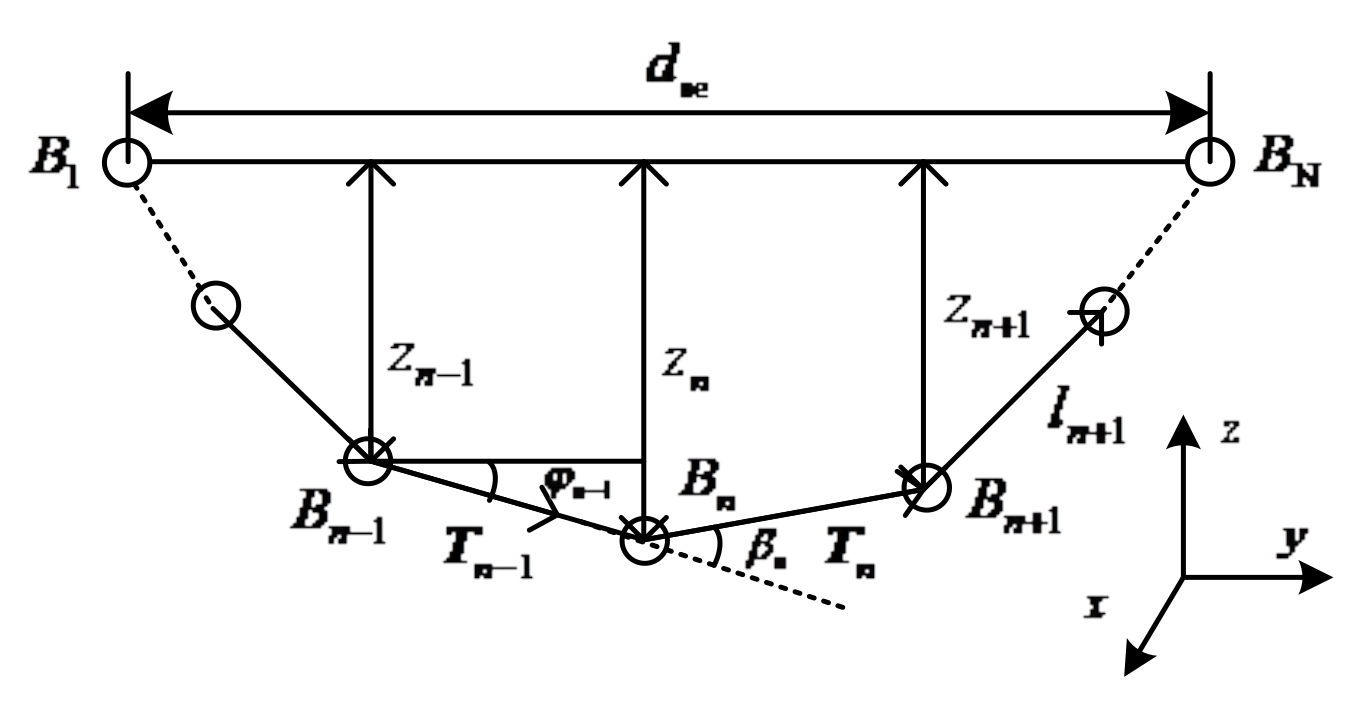
The motion equation of the flexible wire rope is established from the perspective of kinematics, and its motion characteristics are described from the perspective of dynamics. First, the stress on nodes
is analyzed, as shown in
Figure 4.
According to Newton’s second law, the relation between the acceleration of the
ith section on the flexible wire rope and the external force is obtained as follows:
where
are the external forces exerted on the nodes
, respectively.
and
are the pulling forces exerted on the nodes
, respectively. According to Newton’s third law, they meet the following constraints:
where
is the amplitude of the vector
,
is the stiffness coefficient of the tension spring,
is the change of the length of the
ith section on the flexible wire rope, and
is the damping coefficient of the tension spring.
In the
ith moving coordinate system, Equation (24) is also expressed as follows:
According to Equations (28) and (29), the following relations can be further obtained:
Combining Equations (23) and (27)–(33), the dynamic equation of the flexible wire rope with deflection angle
, pitch angle
, and tensile length of discrete section
as state variables can be obtained as follows:
where
is the state variable of the flexible wire rope, and
are the inertia matrix, nonlinear term, potential energy term, and equivalent external force term of the flexible wire rope system, respectively.
As a result, the motion equation of the flexible wire rope has been established.
3.1.2. Capture Constraint Analysis of the Snare Capture
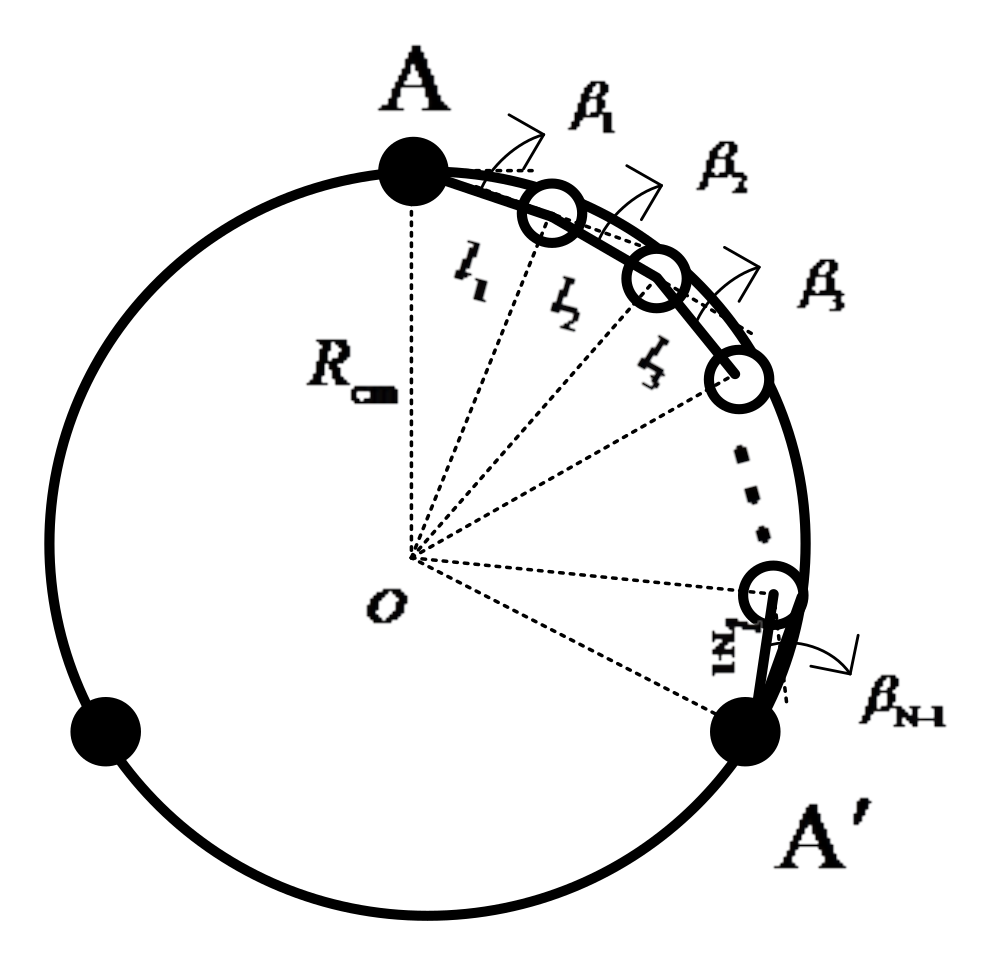
As shown in
Figure 5, we assume that the fixed ring and the rotating ring are located at the same plane whose radius is
. In the initial state, the end
of the flexible wire rope
is installed on the fixed ring, and the end
is connected to the rotating ring. The initial angle between the adjacent discrete segments is
, which is initially in a static equilibrium state. To obtain the initial state of the flexible wire rope, a stress analysis is carried out, as shown in
Figure 6.
According to
Figure 6, the following equilibrium equation for each node can be obtained as follows:
where
are the elastic tensions generated at the
i-1th and
ith section on the flexible wire rope, respectively, and
are the equivalent structural forces of the torsion spring generated at nodes
,
, and
, respectively.
Since Equation (35) can be divided into two groups of scalar equations in direction
y and
z, a total number of
static force balance equations can be established. In addition, from the perspective of geometric constraints, since the flexible wire rope only moves in the plane
yoz, let
, and the following two geometric constraint equations can be established simultaneously:
where
is the distance between the beginning and end of the flexible wire rope. Its value range is defined as follows:
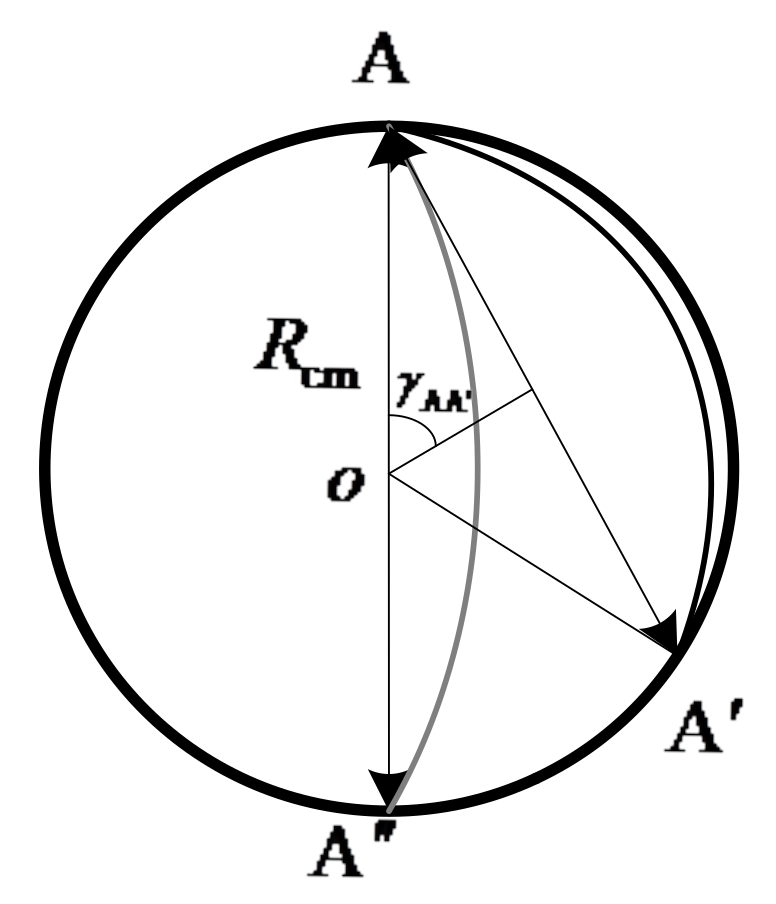
(1) When the flexible wire rope is located at the initial position
(as shown in
Figure 7), the minimum value of
can be calculated according to the following formula:
where
represents half of the center angle corresponding to the arc
.
(2) When the flexible wire rope is located at , the maximum value of is taken. Therefore, the reasonable range of the distance between the two ends of the flexible wire rope is .
So far, a total of
equations have been established, and we have
. Since the number of basic unknown variables
is
, the equation composed of Equations (35) and (36) can be solved. Then, the tension and bending preloads in the initial state can be obtained as follows:
where
is the total length of the flexible wire rope.
3.2. Impact Modeling and Analysis
To simplify the impact modeling process, some assumptions are made below:
The impact force only acts on the node. If the number of nodes is large enough, this could be realized.
The relative velocity between the grapple shaft and the flexible wire rope is low enough. Based on this, we assume that the velocity-dependent term makes no contribution to the force equilibrium equation. For the space capture task, the relative velocity between the target object and the capture device at the beginning of contact is controlled at a low level to reduce the impact force. The maximum of this relative velocity is about 0.1 m/s in most cases [
29,
30,
31]. At this velocity level, even if this velocity is considered in the impact dynamic model, the result of the calculated impact force does not vary significantly from that of this paper, considering the difference of mass of the target object [
32]. As a result, this assumption is reasonable and able to simplify the calculation process.
Considering the small deformation caused by contact, the impact force direction stays the same during the contact process and only a single point contact happens.
When the flexible wire rope is subjected to external force, we assume that there is a virtual spring between the flexible wire rope and the support shell according to its reaction state. One end of the spring is connected to the node of the flexible wire rope while the other end is connected to the support shell. Because the stiffness coefficient of the virtual spring is not constant, the contact impact force cannot be simply calculated according to the Hertz damping model. In fact, the stiffness coefficient of the virtual spring is related to the pressing depth
and the distance
between the beginning and end of the flexible wire rope. The pressing depth is defined as the distance that the flexible wire rope moves in the contact direction from the initial position to the current position, which is shown in
Figure 8.
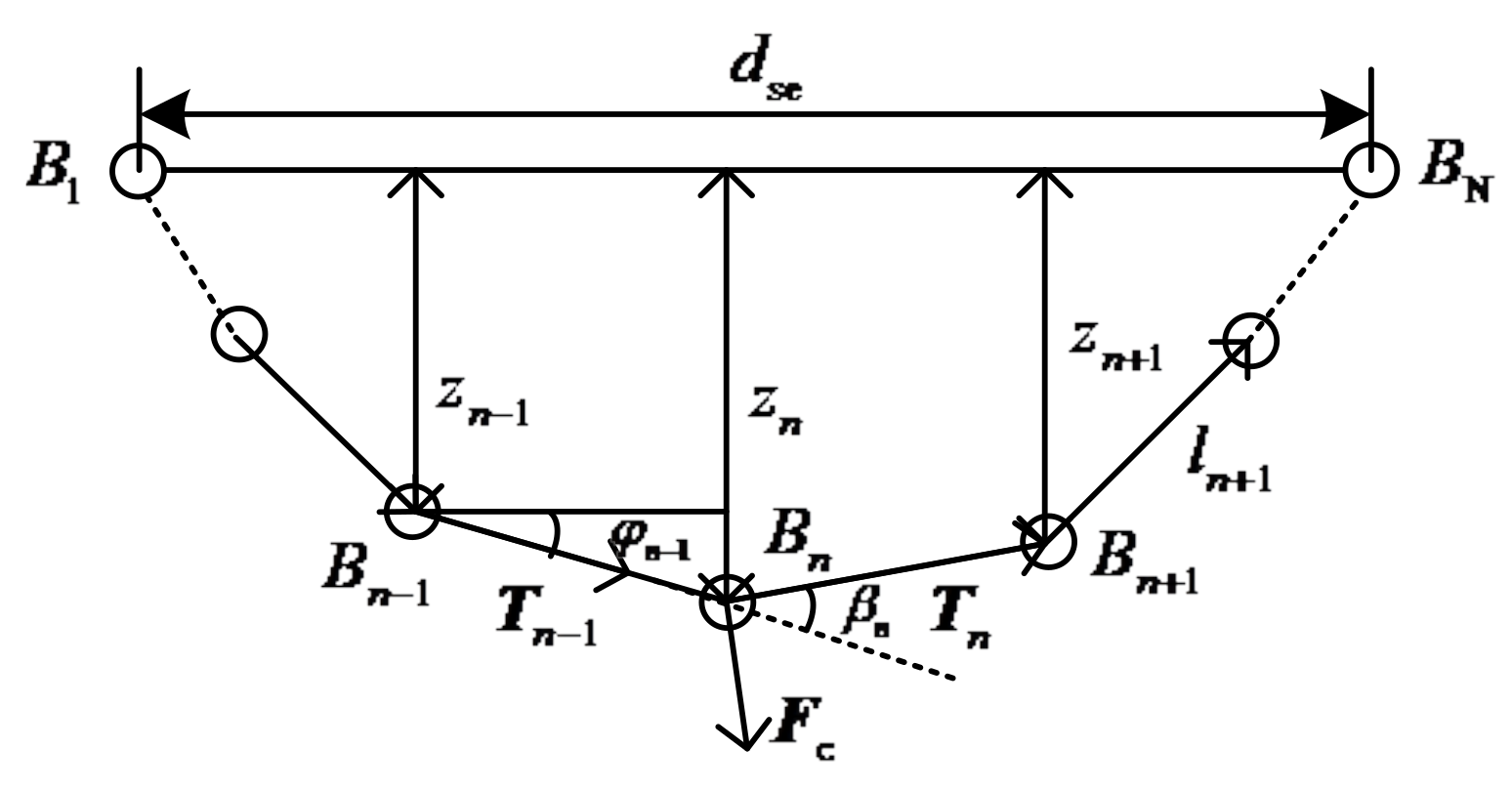
We assume that the contact occurs on node
n of the flexible wire rope, and the force condition is shown in
Figure 9. The static force equilibrium equations for node
can be established as:
where
is the external force applied on node
n.
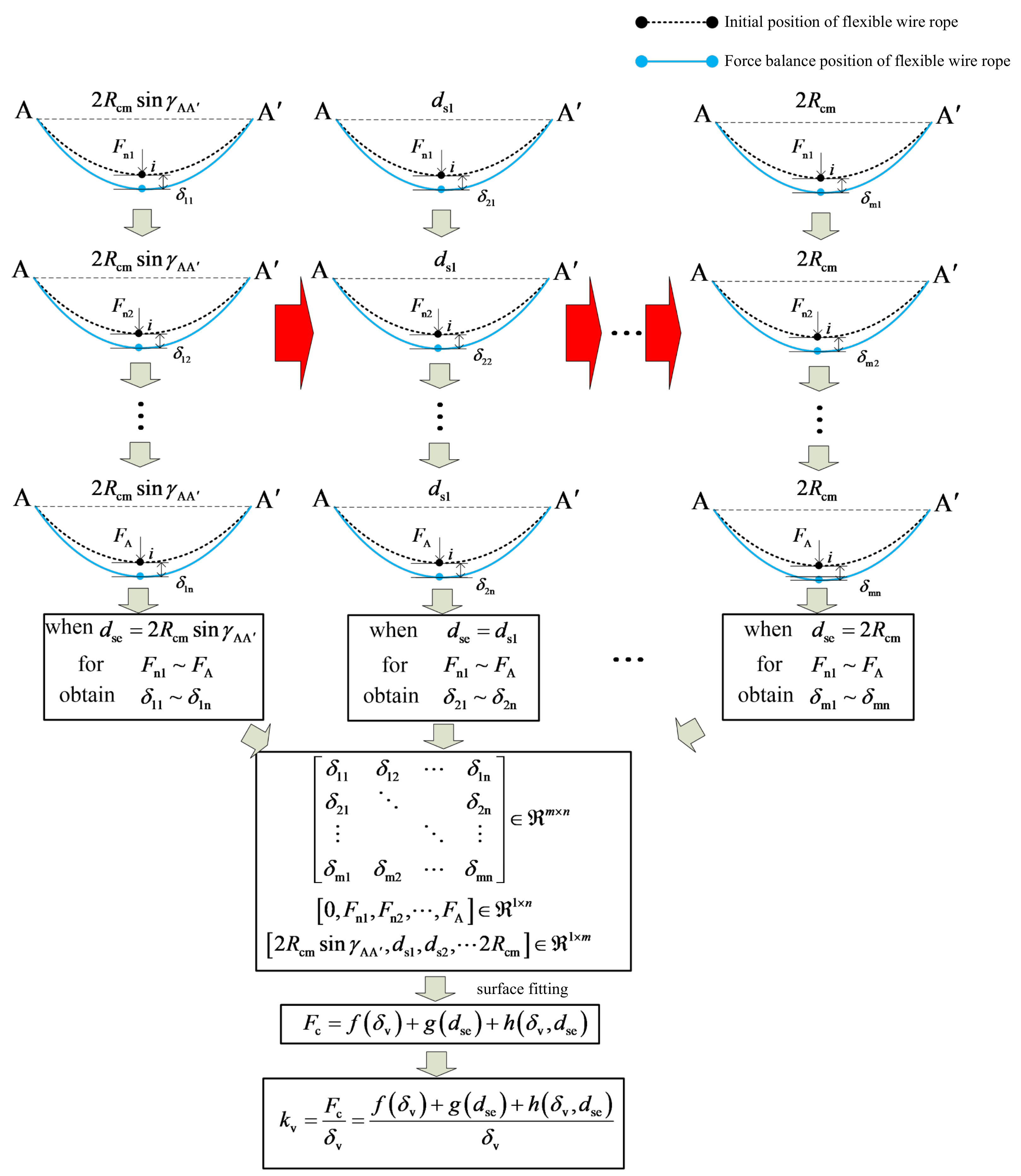
By combining Equation (40) with Equation (36), the equilibrium equations of the flexible wire rope in the presence of an external force can be obtained. When a group of and is given, the corresponding indentation depth can be obtained. In a sense, the contact condition of the flexible wire rope can be compared with that of a spring. However, the difference is that the stiffness of the flexible wire rope in the contact process is not the only constant. It is related to the pressing depth and the distance between the beginning and end of the flexible wire rope. The stiffness coefficient of the virtual spring is defined as the ratio of the normal pressure at the contact point to the corresponding pressing depth, which can be solved by the following steps.
(1) The initial ranges for and are set first. The range of is determined by the constraints of the institution. However, the range of is set through a tentative process. The minimum value is 0 and the maximum value is first set to be .
(2) A set of start–end distances
with
, and
with
are given. By substituting these values into Equations (36) and (40), the corresponding indentation depth
of these values can be obtained. Then, the high-order polynomial is used to fit the surface of the calculation results, and the following functional relation can be obtained as follows:
where
are the polynomial functions of
, respectively, while
represents the coupling function with variables
. If the precision of curved surface fitting is not high enough, the method of piecewise fitting can be used.
According to the definition, the expression of the virtual spring contact stiffness coefficient can be obtained as follows:
(3) In the process of capturing, when the pressing depth and the distance between the beginning and end of the flexible wire rope are known, the contact stiffness coefficient of the virtual spring can be obtained through Equation (42). The detailed calculation process of the contact stiffness coefficient of the virtual spring is shown in
Figure 10. Furthermore, the dynamic contact impact force between the target and the flexible wire rope can be calculated according to the Hertz damping model:
where
is the relative compression velocity in the contact process.
It is notable that the proposed polynomial function fitting method can be used to calculate the contact stiffness coefficient of the virtual spring of the flexible wire rope, which has a certain scope of application, that is and . In the process of capturing, the calculation accuracy can only be guaranteed when the above two variables are within this range. If the static impact force at the maximum compression position is greater than the upper limit value of the fitting range , the upper limit value should be reset to such a value , and the above calculation process should be repeated until the calculation results meet the constraint conditions. To avoid similar repetitive work, we can set the upper limit of as large as possible in the initial stage. However, it will cost more time in the data fitting stage.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}