
Development of a 6-DOF Testing Platform for Multirotor Flying Vehicles with Suspended Loads


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Degrees of Freedom of the Testbeds | Summarized Details of the Testbed | Type of Vehicle in the Test | Reference | Suspended Load |
|---|---|---|---|---|
| One DOF | Single axis test-bench used for PID controller tuning | Quadcopter | [7] | No Suspended load |
| Single axis control test bench | [8] | |||
| Three DOF | Gyroscopic test bench to test for stability tests including over or under actuated UACs as we control loop structures | Quadcopter | [9] | |
| Simple test rig for testing the designed controller. Rotation about two of the three axes (pitch, raw and yaw) is fixed allowing for rotation on only either the pitch or the roll. Translation is also fixed in all direction except for vertical movement which is also fixable. | [10] | |||
| Gyroscopic 3 DOF test bench for analyzing control systems | [11] | |||
| 3DOF test bench to test for modified PID controller for stabilization of a quadcopter. The bed allows for rotation about three axes with translation being restricted. | [12] | |||
| Four DOF | Test platform based on gyroscope motion with 3 side circles. Tuning of control parameters. Four axis motion tests including, elevation, pitch, yaw and roll tests. | Multi-rotor UAV | [13] | |
| 3DOF test platform where rotation about all axes is allowed whereas translation is restricted, and a 1 DOF test platform complementing the first platform | Quadcopter | [14] | ||
| Development of a variable DOF flight control system for a quadcopter.Separate test for pitch, yaw roll and elevation through use of lockable universal joints and roller bearings allowing of up to 4 DOF. | [15] | |||
| Six DOF | Test bed to safely test designed UAV. Test platform allows for rotation about the pitch and roll axes and translation along three axes through linear guides. | Quadcopter | [16] | |
| Test platform to test a developed hovering algorithm | [17] | |||
| Testbed designed to evaluate performance of bother attitude and position controllers for multicopter vehicles. Testbed designed to allow 6DOF motion of the multicopter | [1] | |||
| 6 DOF test platform to emulate actual free flight to aid in the design and control of UAVs. In the platform the UAV is attached to the end effector of an articulated manipulator | [18] | |||
| Quadcopter test bench for 6 DOF flight controller testing. Utilizes a 6 axes torque-force sensor to simulate the position of the vehicle | [3] | |||
| Unrestricted free flight | Implementation of an anti-swing controller on a quadcopter with a suspended load. Test conducted indoor in a cage | Quadcopter | [27] | Suspended load |
| Proposed trajectory tracking controller for a single load carrying quadcopter. Experiments conducted indoor in a cage | [28] | |||
| Development of a collaborative control and transportation of a swing load using multiple multicopters. Experiments conducted indoor | [29] | |||
| Test of controller for a quadcopter with suspended load through window. Test conducted using Astec Hummingbird quadcopter to validate proposed control. Actual test with no testbed | [30] |
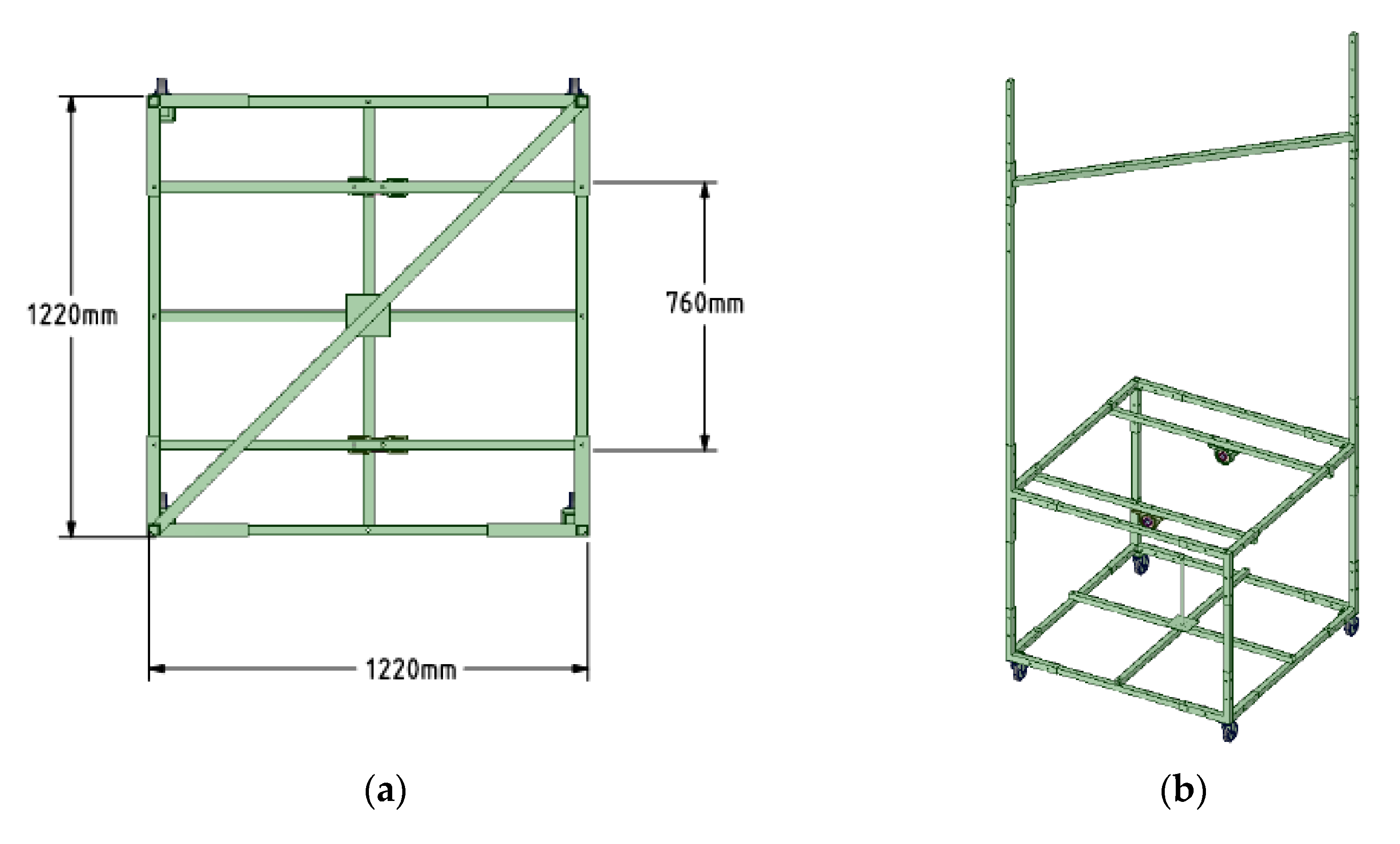
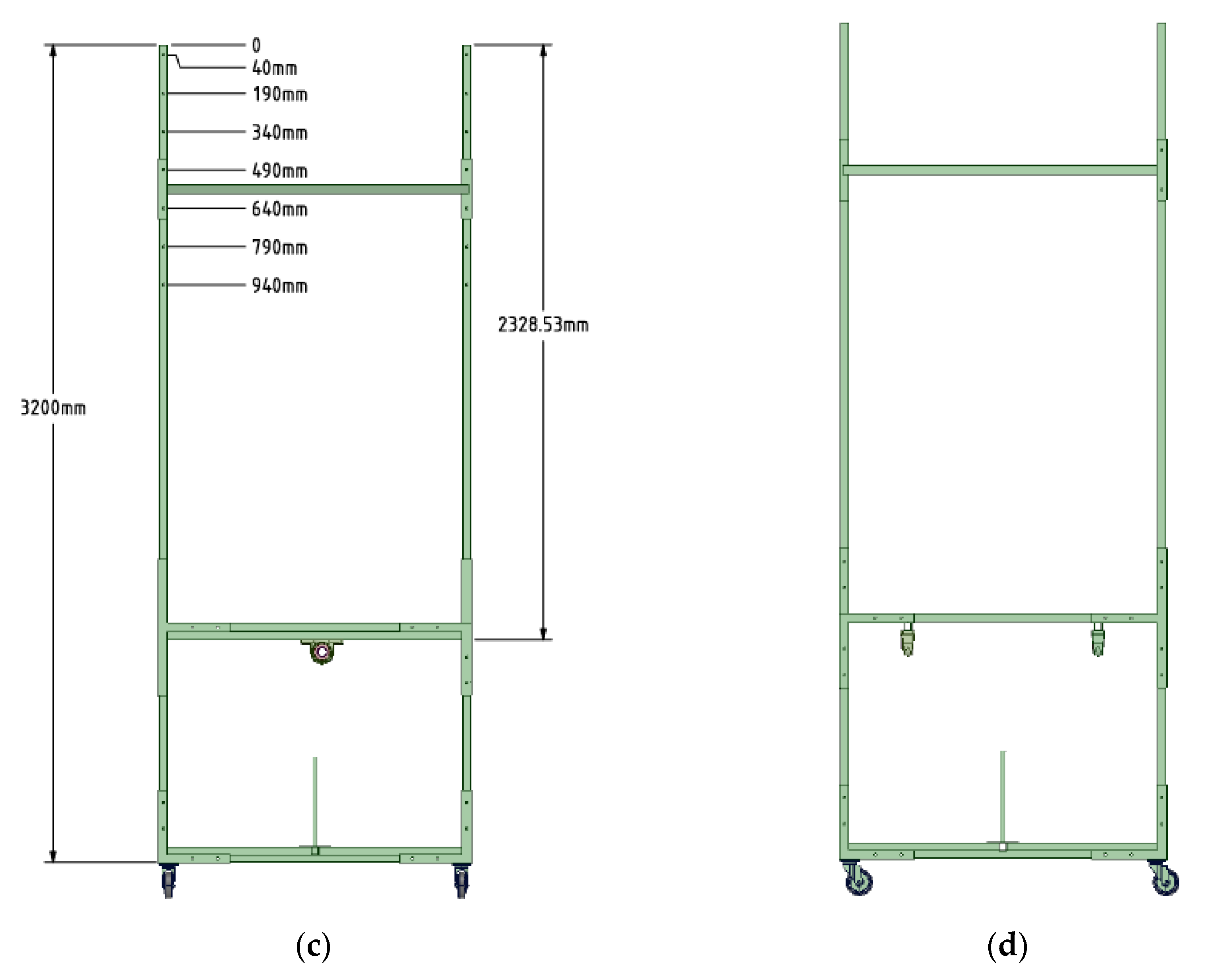
2. Proposed Test Platform
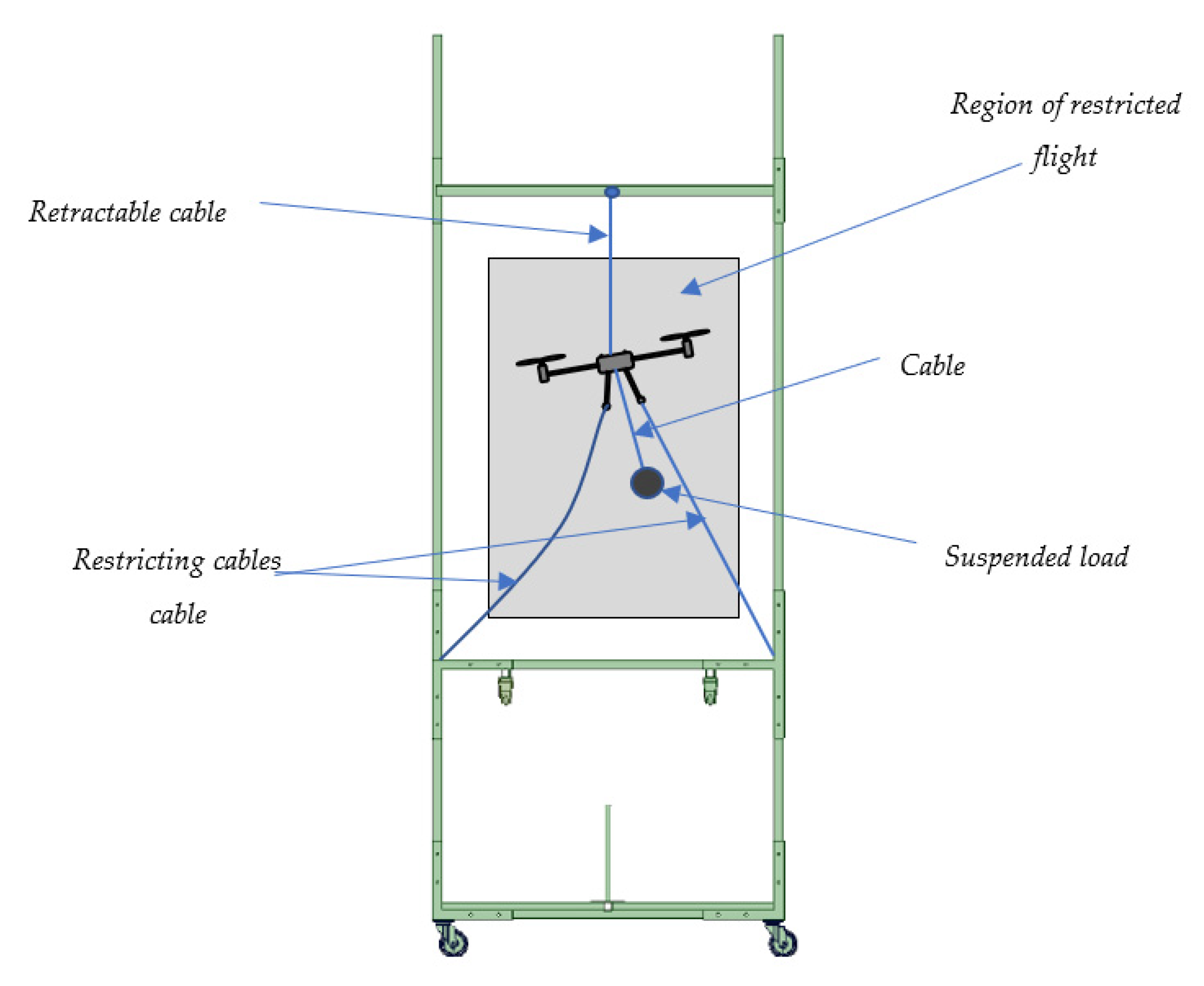
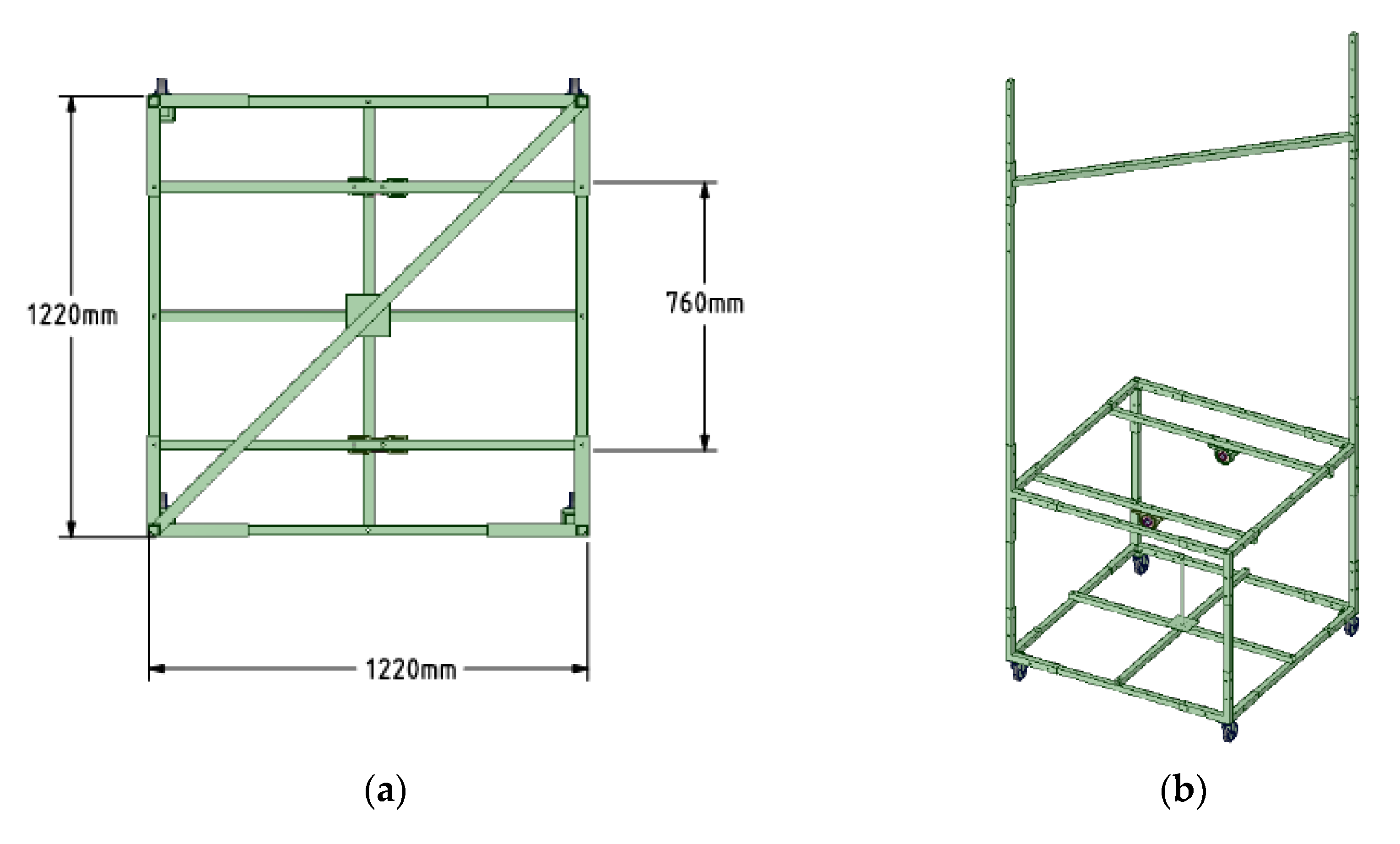
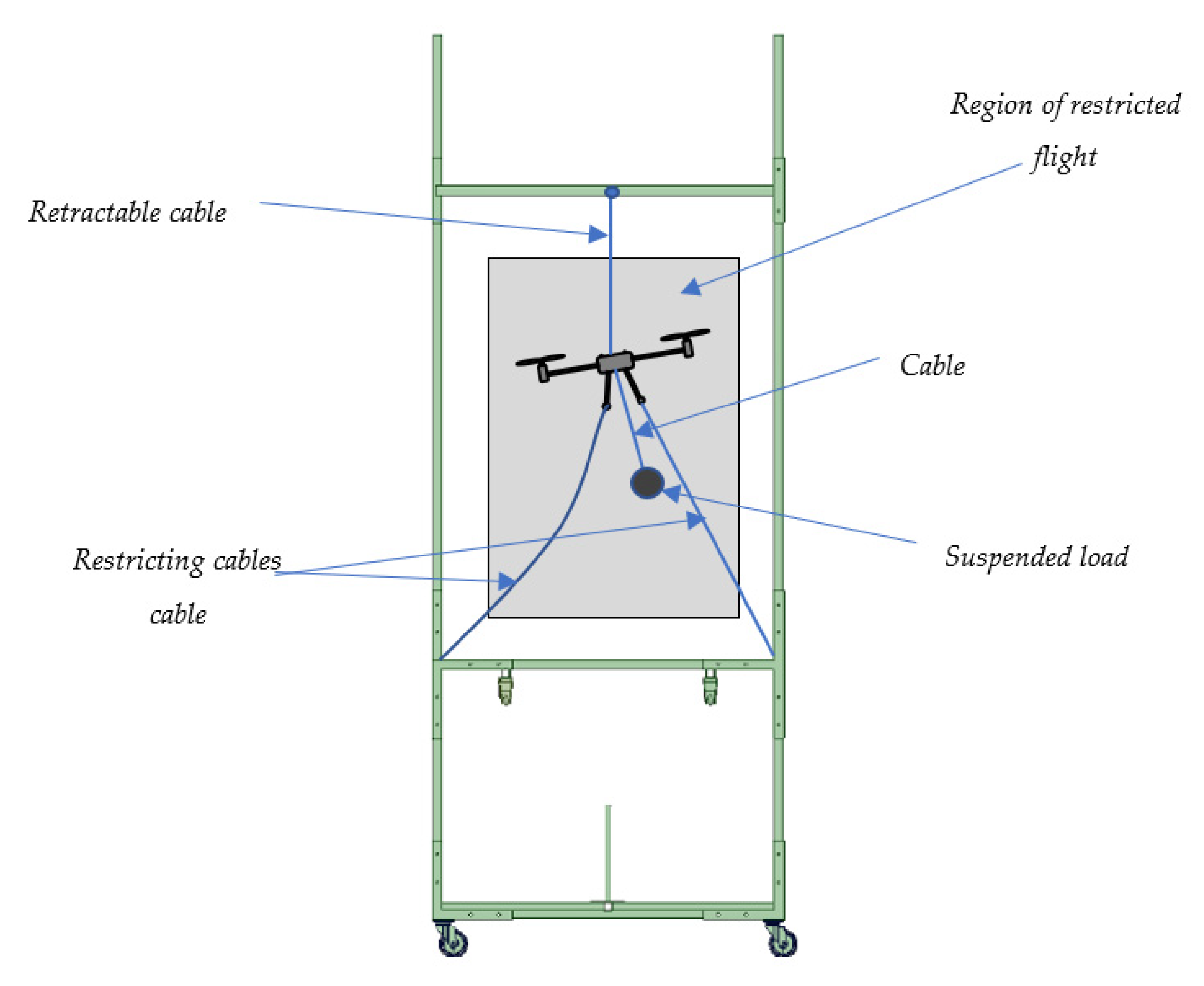
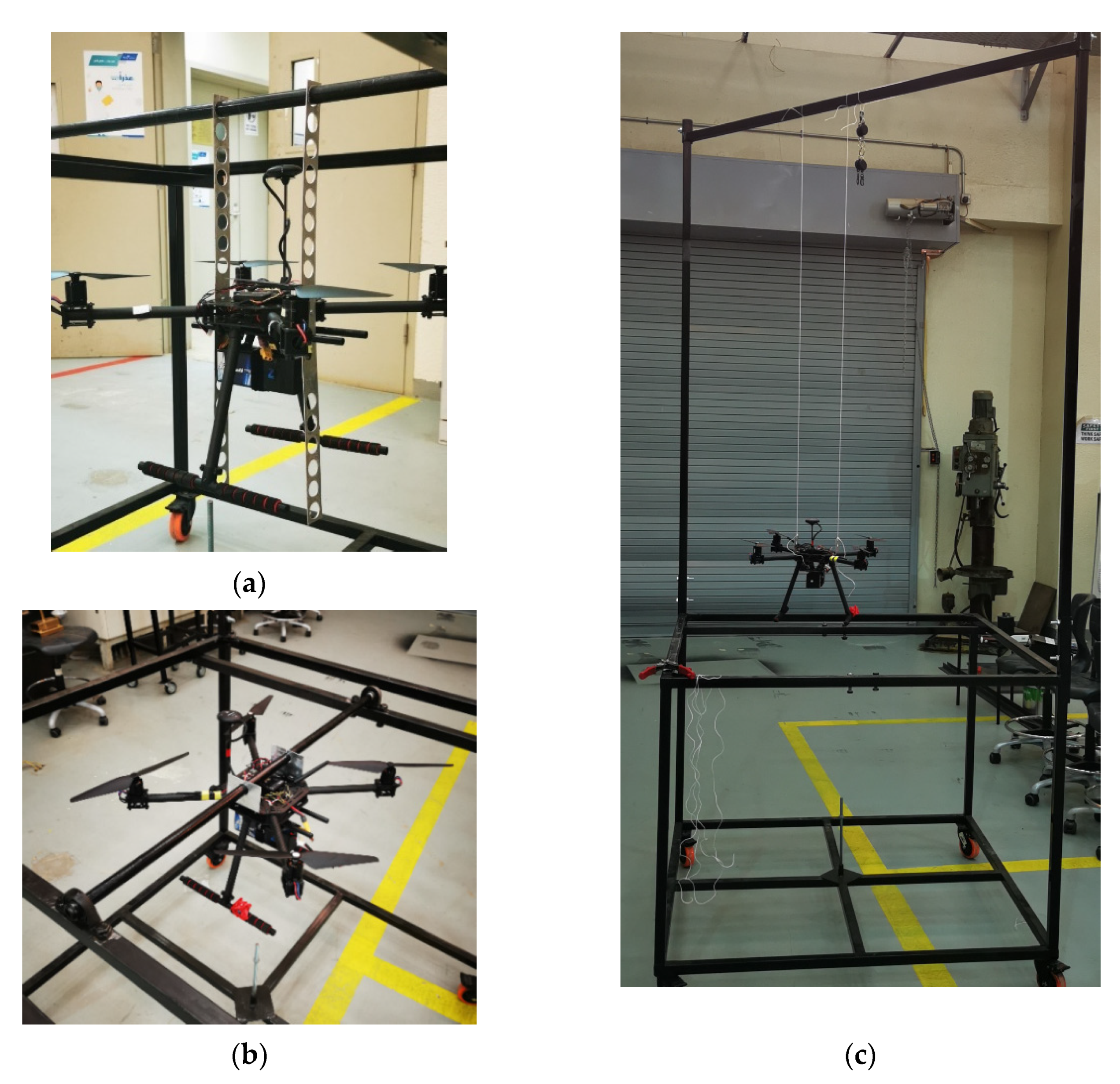
2.1. Restricted Flight Testing for Indoor and Outdoor Controller Evaluation
Indoor Flight Testing
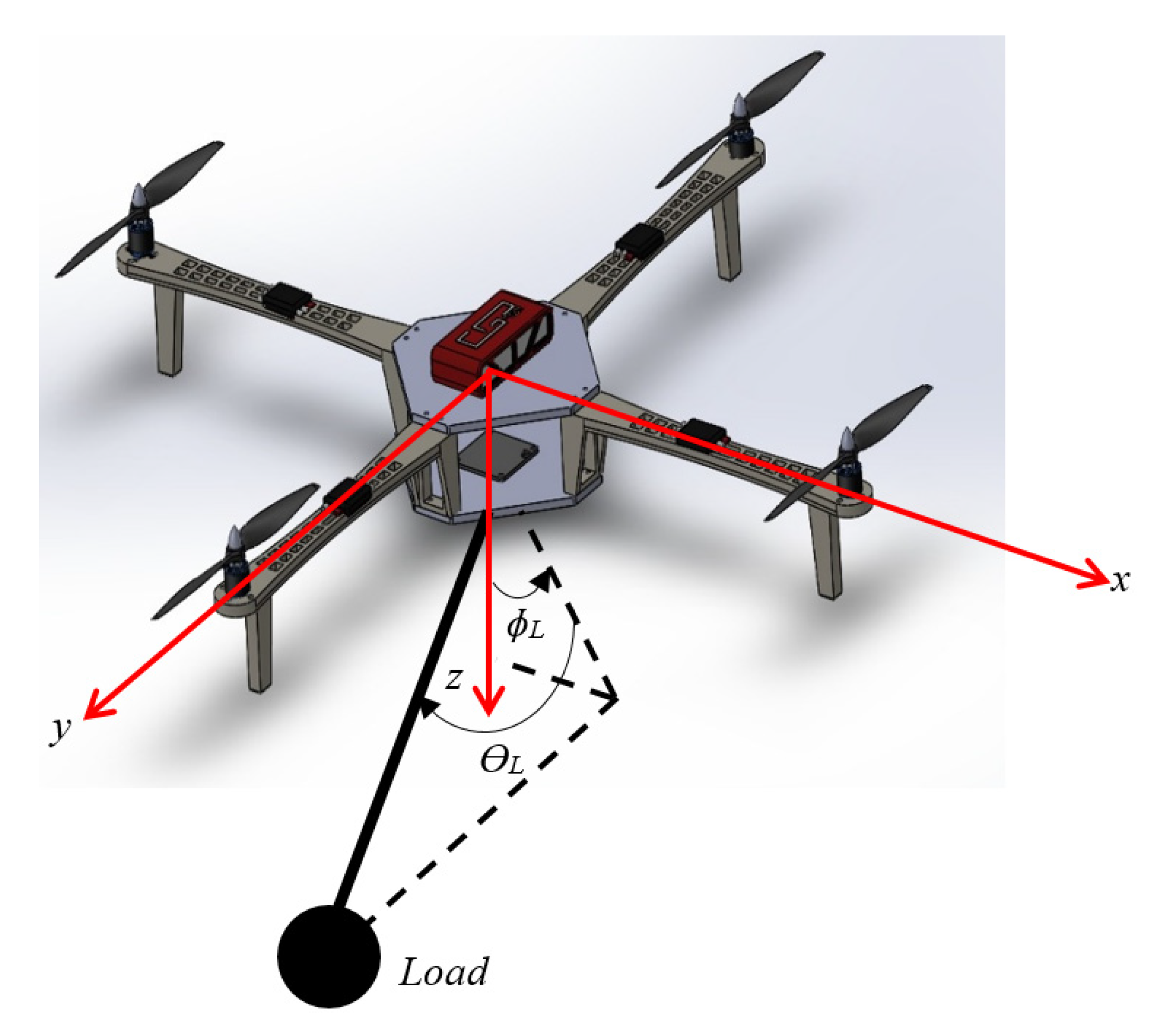
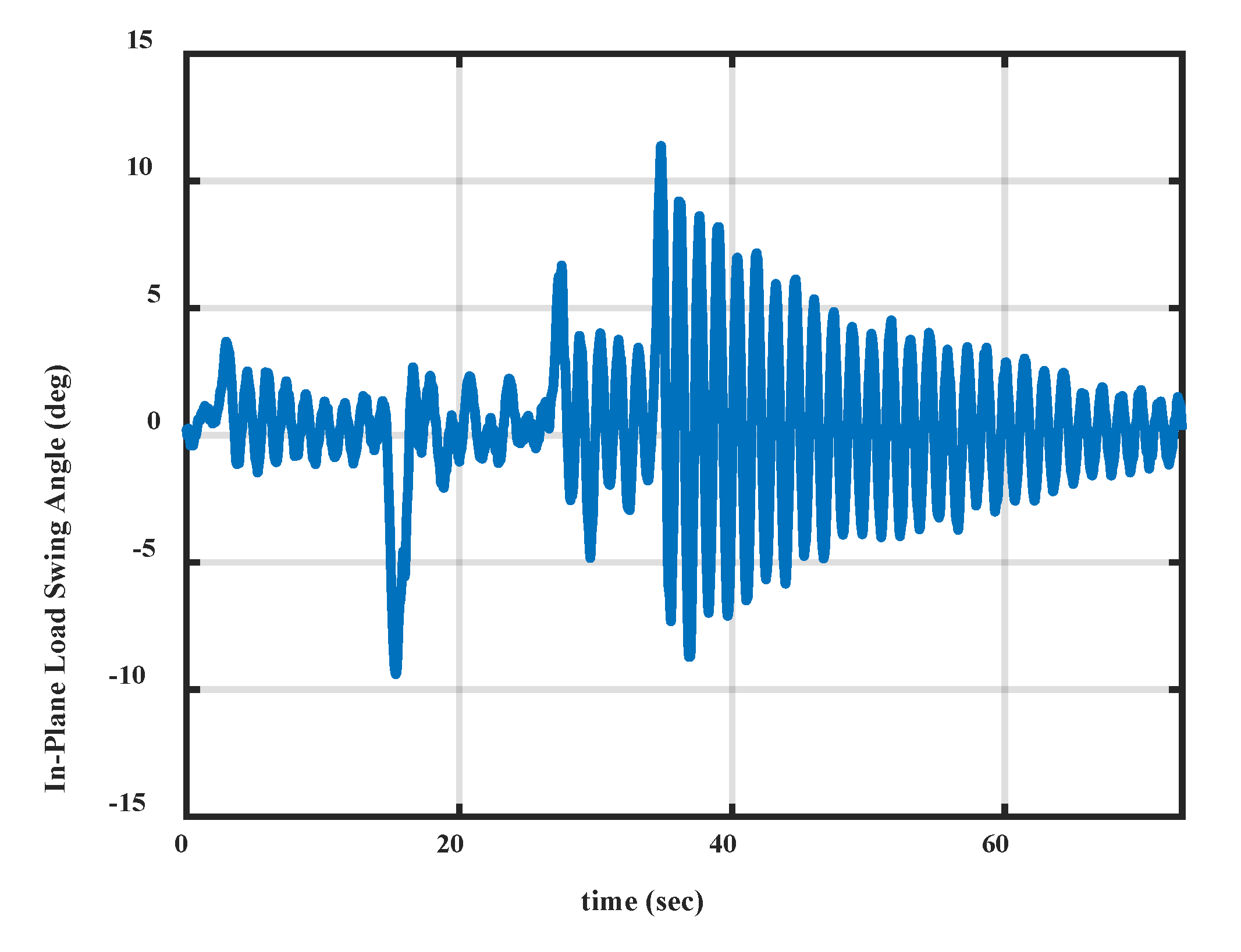
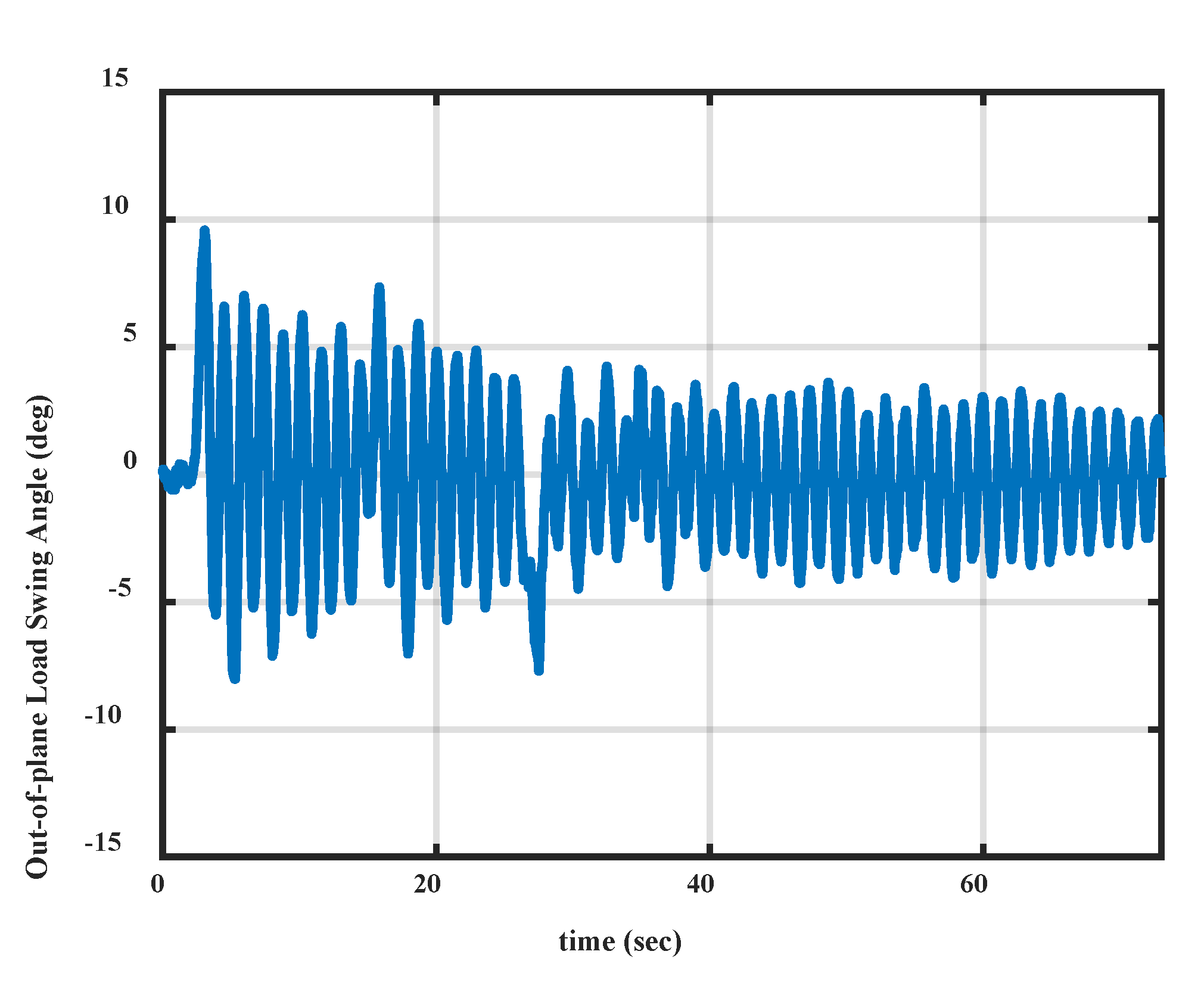
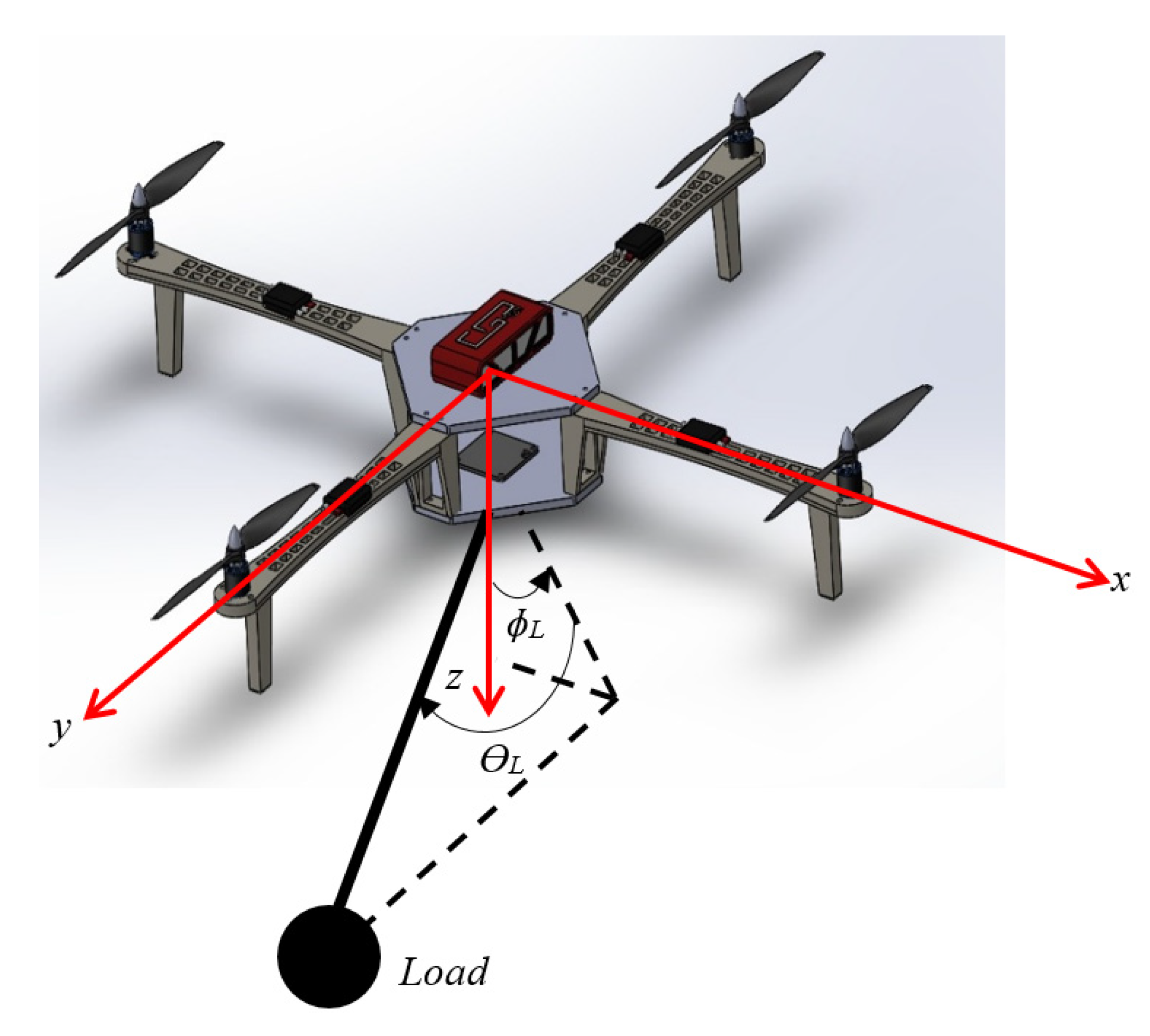
2.2. Test Setup for the Anti-Swing Controller’s Evaluation
2.3. Determination of Multirotor Mass Properties
3. Test Results and Discussion
3.1. Determination of the Quadcopter’s Mass Properties
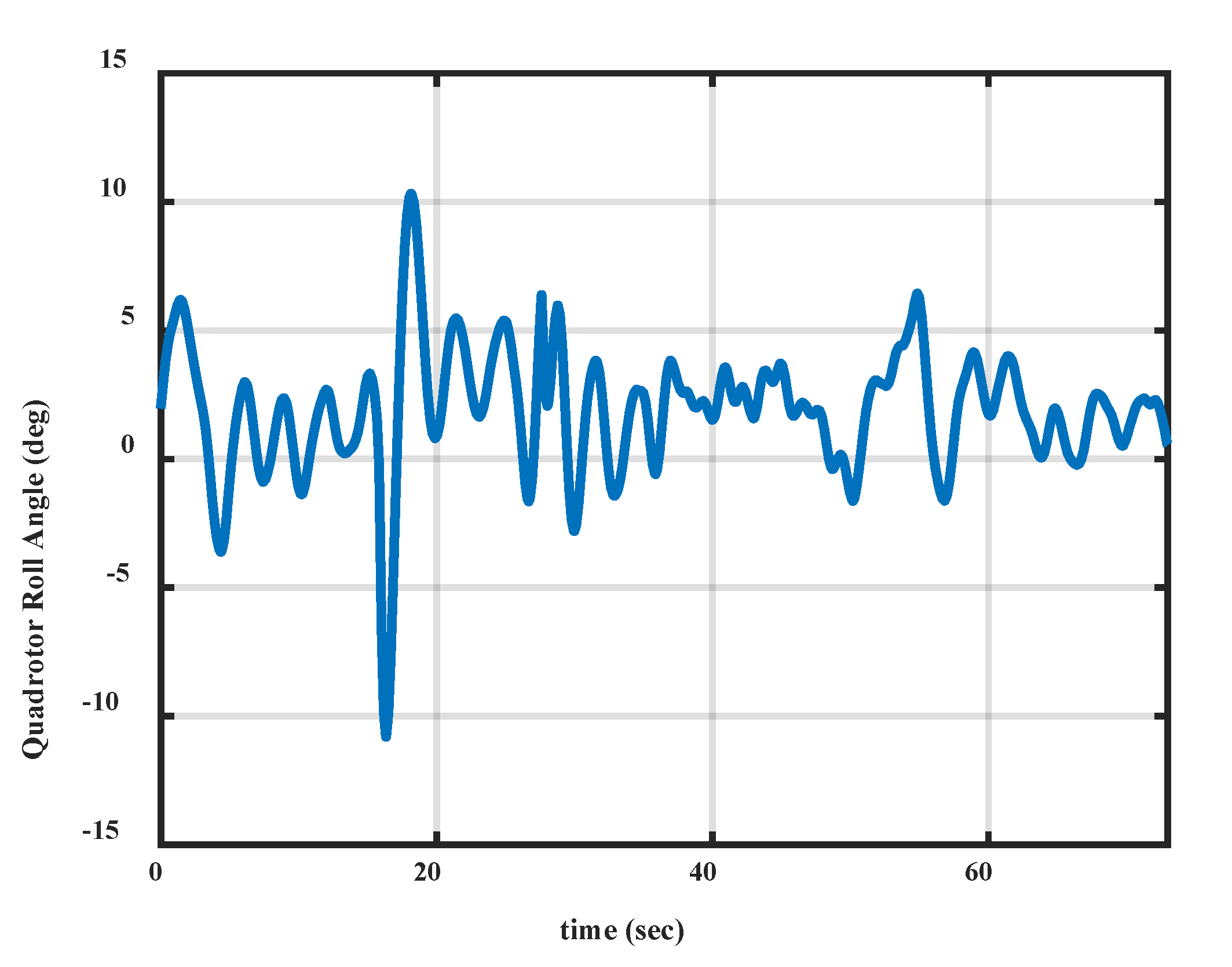
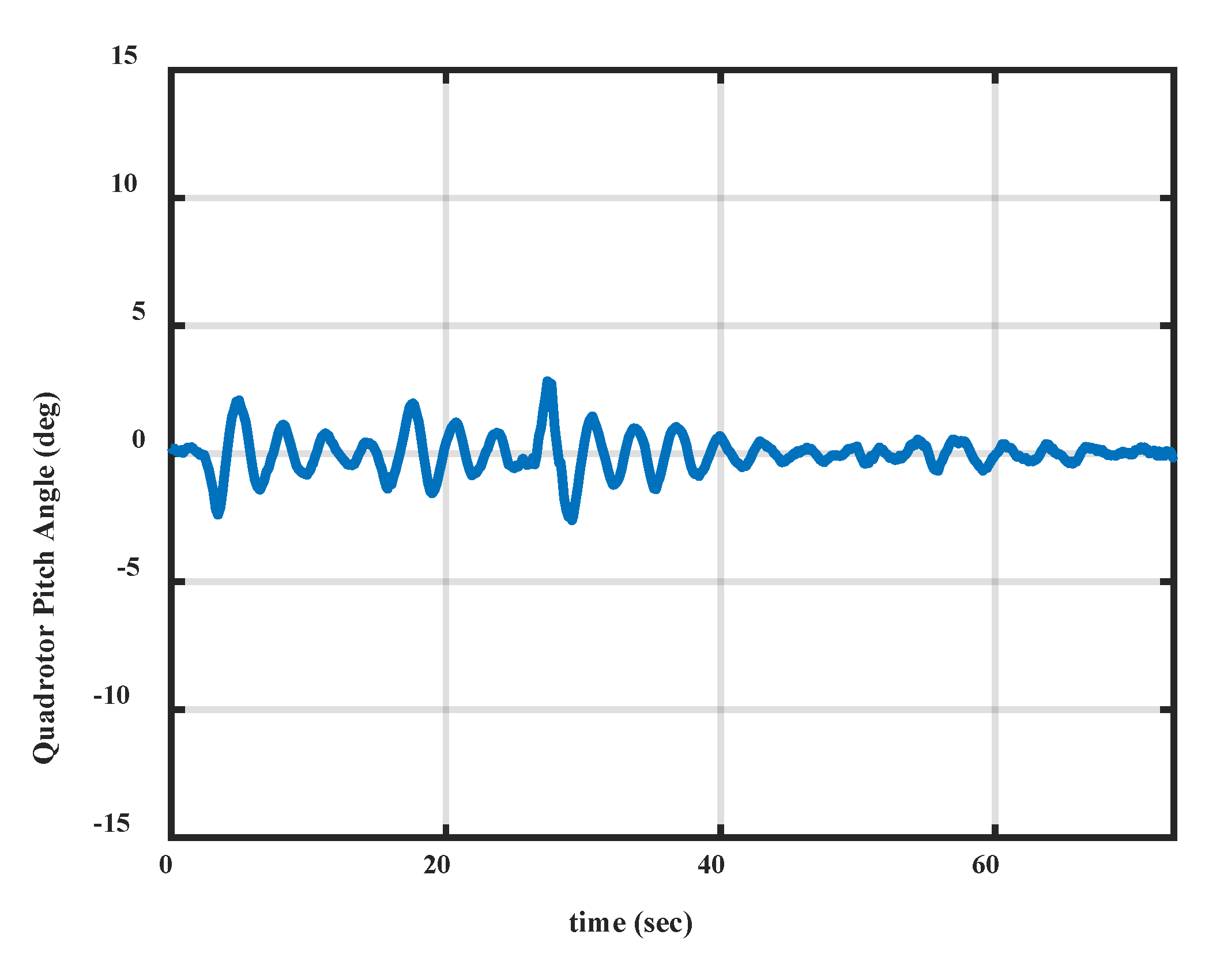
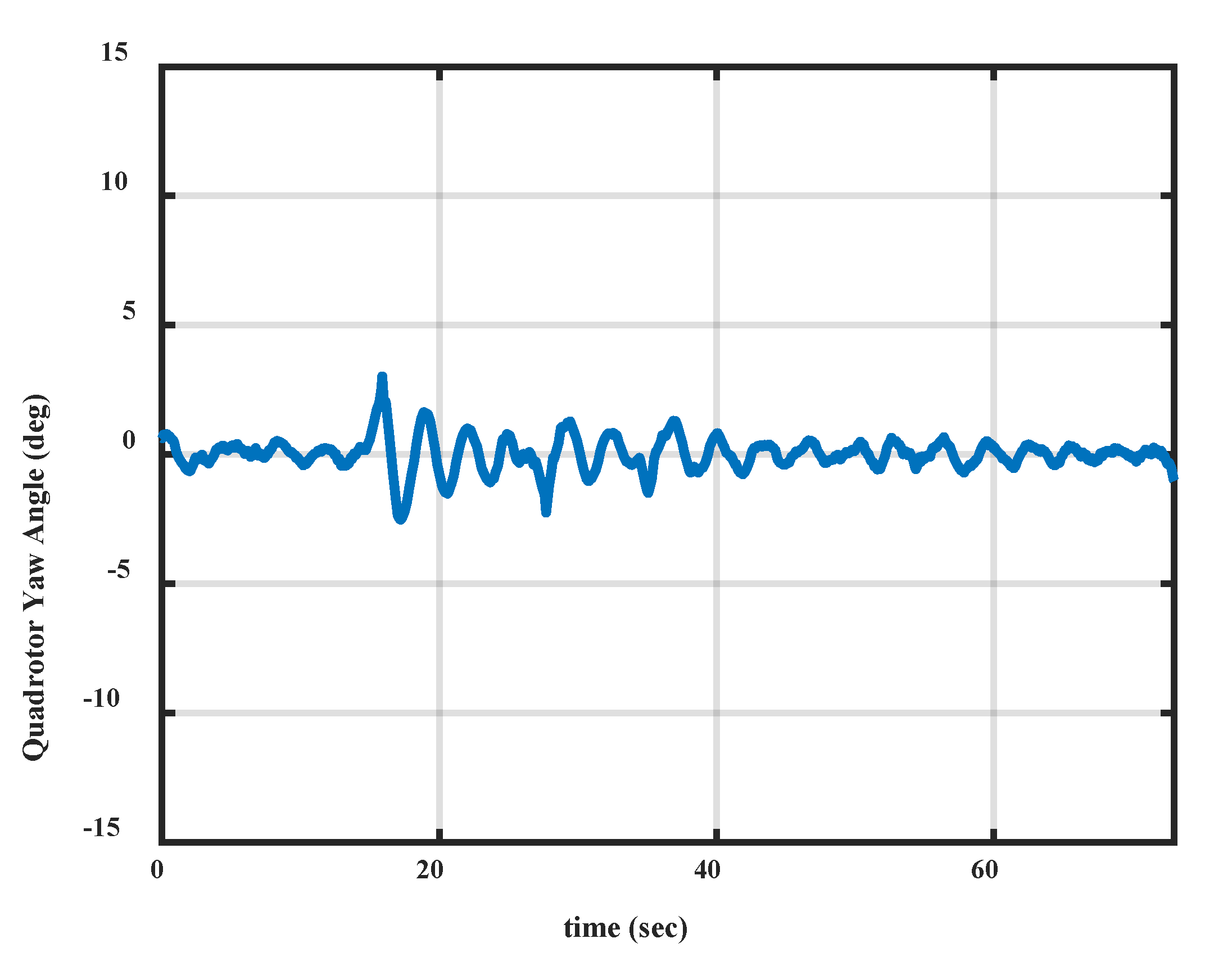
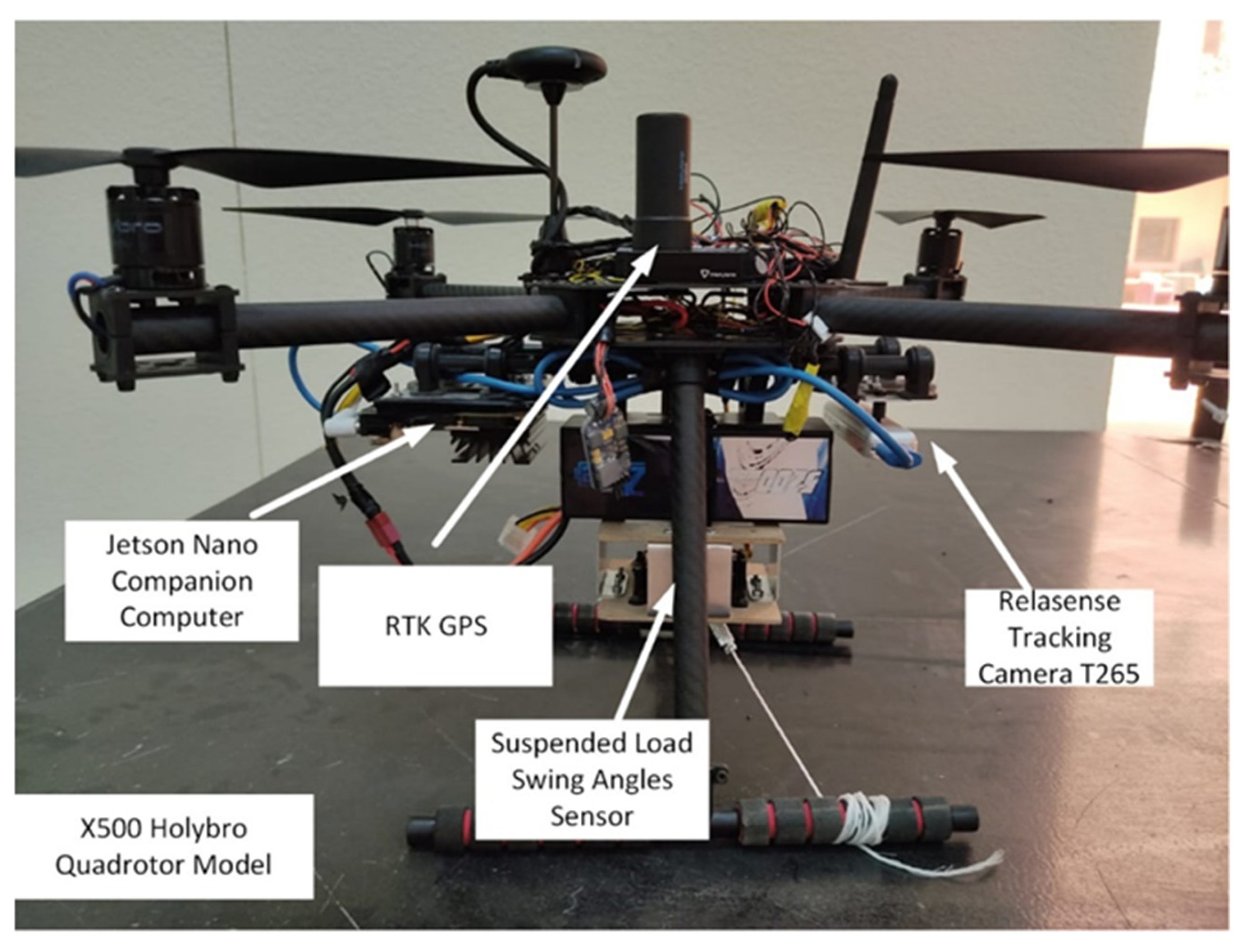
3.2. Flight Testing of Holybro X500 Quadcopter
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xuan-Mung, N.; Hong, S.-K. A Multicopter ground testbed for the evaluation of attitude and position controller. Int. J. Eng. Technol. 2018, 7, 65–73. [Google Scholar]
- Khaligh, S.P.; Martínez, A.; Fahimi, F.; Koch, C.R. A HIL Testbed for Initial Controller Gain Tuning of a Small Unmanned Helicopter. J. Intell. Robot. Syst. 2014, 73, 289–308. [Google Scholar] [CrossRef]
- Yu, Y.; Ding, X. A quadrotor test bench for six degree of freedom flight. J. Intell. Robot. Syst. 2012, 68, 323–338. [Google Scholar] [CrossRef]
- Bhargava, A. Development of a Quadrotor Testbed for Control and Sensor Development. Master’s Thesis, Clemson University, Clemson, SC, USA, 2008. [Google Scholar]
- Hancer, M.; Bitirgen, R.; Bayezit, I. Designing 3-DOF Hardware-In-The-Loop Test Platform Controlling Multirotor Vehicles. IFAC-PapersOnLine 2018, 51, 119–124. [Google Scholar] [CrossRef]
- Wang, H.; Azaizia, D.; Lu, C.; Zhang, B.; Zhao, X.; Liu, Y. Hardware in the loop based 6DoF test platform for multi-rotor UAV. In Proceedings of the 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 1693–1697. [Google Scholar]
- Grzonka, S.; Grisetti, G.; Burgard, W. A fully autonomous indoor quadrotor. IEEE Trans. Robot. 2012, 28, 90–100. [Google Scholar] [CrossRef] [Green Version]
- Zul Azfar, A.; Hazry, D. A simple approach on implementing IMU sensor fusion in PID controller for stabilizing quadrotor flight control. In Proceedings of the 7th International Colloquium on Signal Processing and Its Applications, Penang, Malaysia, 4–6 March 2011. [Google Scholar]
- Santos, M.F.; Silva, M.F.; Vidal, V.F.; Honorio, L.M.; Lopes, V.L.M.; Silva, L.A.Z.; Rezende, H.B.; Ribeiro, J.M.S.; Cerqueira, A.S.; Pancoti, A.A.N.; et al. Experimental Validation of Quadrotors Angular Stability in a Gyroscopic Test Bench. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing, Sinaia, Romania, 10–12 October 2018; pp. 783–788. [Google Scholar]
- Øyvind, M.; Eivind, S.K. Modeling, design and experimental study for a quadcopter system construction. Master’s Thesis, University of Agder, Agder, Norway, 2011. [Google Scholar]
- Veyna, U.; Garcia-Nieto, S.; Simarro, R.; Salcedo, J.V. Quadcopters Testing Platform for Educational Environments. Sensors 2021, 21, 4134. [Google Scholar] [CrossRef] [PubMed]
- Paiva, E.; Soto, J.; Salinas, J.; Ipanaque, W. Modeling, simulation and implementation of a modified PID controller for stabilizing a quadcopter. In Proceedings of the 2016 IEEE International Conference on Automatica (ICA-ACCA), Curico, Chile, 19–21 October 2016; pp. 1–6. [Google Scholar]
- Ugur, Y.; Irfan, Ö.; Hakan, U.; Ali Riza, G.; Telat, T.; Metin, K.; Cihan, K.; Gökhan, U. Development of the Test Platform for Rotary Wing Unmanned Air Vehicle. Bilecik Seyh Edebali Univ. J. Sci. 2016, 2, 18–24. [Google Scholar]
- Filho, J.G.B.F.; Dorea, C.E.T.; Bessa, W.M.; Farias, J.L.C.B. Modeling, Test Benches and Identification of a Quadcopter. In Proceedings of the 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Recife, Brazil, 8–12 October 2016; pp. 49–54. [Google Scholar]
- Ömurlu, V.E.; Ahmet, K.; Utku, B.; Engin, S.N.; Sedat, K. A stationary, variable DOF flight control system for an unmanned quadrocopter. Turk. J. Electr. Eng. Comput. Sci. 2011, 19, 891–899. [Google Scholar]
- Jatsun, S.; Emelyanova, O.; Martinez Leon, A.S. Design of an Experimental Test Bench for a UAV Type Convertiplane. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Moscow, Russia, 16–17 October 2019; pp. 1–5. [Google Scholar]
- Jatsun, S.; Emelyanova, O.; Lushnikov, B.; Martinez Leon, A.S.; Mosquera Morocho, L.M.; Pechurin, A.; Nolivos Sarmiento, C.A. Hovering control algorithm validation for a mobile platform using an experimental test bench. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Moscow, Russia, 16–17 October 2020; pp. 1–7. [Google Scholar]
- Ding, C.; Lu, L.; Wang, C.; Li, J. 6-DOF Automated Flight Testing Using a Humanoid Robot Arm. In Proceedings of the 2018 IEEE 14th International Conference on Automation Science and Engineering, Munich, Germany, 20–24 August 2018. [Google Scholar]
- Dukes, T.A. Maneuvering Heavy Sling Loads Near Hover Part I: Damping the Pendulous Motion. J. Am. Helicopter Soc. 1973, 18, 2–11. [Google Scholar] [CrossRef]
- Liu, D.T. In-Flight Stabilization of Externally Slung Helicopter Loads; U.S. Army Air Mobility Research Development Laboratory: Fort Eustis, VA, USA, 1973. [Google Scholar]
- Gupta, N.K.; Bryson, A.E., Jr. Automatic Control of a Helicopter with a Hanging Load; U.S. Army Air Research and Monility COnand Ames Directorate: Moffett Field, CA, USA, 1973. [Google Scholar]
- Hutto, A.J. Flight-Test Report on the Heavy-Lift Helicopter Flight-Control System. Am. Helicopter Soc. 1976, 21, 32–40. [Google Scholar] [CrossRef]
- Ivler, C.M.; Powell, J.D.; Tischler, M.B.; Fletcher, J.W.; Ott, C. Design and Flight Test of a Cable Angle/Rate Feedback Flight Control System for the RASCAL JUH-60 Helicopter. In Proceedings of the American Helicopter Society 68th Annual Forum, Fort-Worth, TX, USA, 1–3 May 2012. [Google Scholar]
- Ivler, C.M.; Powell, J.D.; Tischler, M.B.; Fletcher, J.W.; Ott, C. Design and Flight Test of a Cable Angle Feedback Flight Control System for the RASCAL JUH-60 Helicopter. Am. Helicopter Soc. 2014, 59, 042008. [Google Scholar] [CrossRef]
- Krishnamurthi, J.; Horn, J.F. Helicopter Slung Load Control Using Lagged Cable Angle Feedback. Vert. Flight Soc. 2015, 60, 1–12. [Google Scholar] [CrossRef]
- Scaramal, M.; Enciu, J.; Horn, J. Active Stabilization of Slung Loads in High-Speed Flight Using Cable Angle Feedback. Vert. Flight Soc. 2019, 64, 1–11. [Google Scholar] [CrossRef]
- Herzog, M. Design, Implementation and Analysis of a Controller for a Load Suspended From an Aerial Vehicle. Master’s Thesis, KTH, Skolan för Elektro-Och Systemteknik (EES), Stockholm, Sweden, 2016. [Google Scholar]
- Pereira, P.O.; Herzog, M.; Dimarogonas, D.V. Slung load transportation with a single aerial vehicle and disturbance removal. In Proceedings of the 24th Mediterranean Conference on Control and Automation, Athens, Greece, 21–24 June 2016; pp. 671–676. [Google Scholar]
- Dhiman, K.K.; Kothari, M.; Abhishek, A. Autonomous Load Control and Transportation Using Multiple Quadrotors. Aerosp. Inf. Syst. 2020, 17, 417–435. [Google Scholar] [CrossRef]
- Guo, M.; Gu, D.; Zha, W.; Zhu, X.; Su, Y. Controlling a Quadrotor Carrying a Cable-Suspended Load to Pass Through a Window. J. Intell. Robot. Syst. 2019, 98, 387–401. [Google Scholar] [CrossRef]
- Robin Amsters, N.S.; Quinten, L. Evaluation of Low-Cost/High-Accuracy Indoor Positioning Systems. In Proceedings of the Fourth International Conference on Advances in Sensors, Actuators, Metering and Sensing, Athens, Greece, 24–28 February 2019; pp. 15–20. [Google Scholar]
- PX4. Visual Inertial Odometry. Available online: https://docs.px4.io/master/en/computer_vision/visual_inertial_odometry.html (accessed on 28 May 2021).
- Omar, H.M.; Nayfeh, A.H. Gantry cranes gain scheduling feedback control with friction compensation. J. Sound Vib. 2005, 281, 1–20. [Google Scholar] [CrossRef]
- Frsky. M9-R. Available online: https://www.frsky-rc.com/product/m9-r/ (accessed on 6 November 2021).
- Hyla, P.; Szpytko, J. Vision Method for Rope Angle Swing Measurement for Overhead Travelling Cranes-Validation Approach. In Proceedings of the 13th International Conference on Transport Systems Telematics, TST 2013, Katowice-Ustroń, Poland, 23–26 October 2013; pp. 370–377. [Google Scholar]
- Jain, R.P.K. Transportation of Cable Suspended Load Using Unmanned Aerial Vehicles: A Real-Time Model Predictive Control Approach. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2015. [Google Scholar]
- Goodarzi, F.A.; Lee, D.; Lee, T. Geometric stabilization of a quadrotor UAV with a payload connected by flexible cable. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014. [Google Scholar]
- Goodarzi, F.A.; Lee, D.; Lee, T. Geometric Control of a Quadrotor UAV Transporting a Payload Connected via Flexible Cable. Int. J. Control. Autom. Syst. 2015, 13, 1486–1498. [Google Scholar] [CrossRef] [Green Version]
- PX4. Real Time Kinetics (RTK). Available online: https://docs.px4.io/master/en/advanced_features/rtk-gps.html (accessed on 28 May 2021).
- Intel® RealSense™ Tracking Camera. Available online: https://dev.intelrealsense.com/docs/tracking-camera-t265-datasheet (accessed on 6 November 2021).
- Kladivova, M.; Mucha, L. Physical pendulum-a simple experiment can give comprehensive information about a rigid body. Eur. J. Phys. 2014, 35, 025018. [Google Scholar] [CrossRef]
- Krznar, M.; Kotarski, D.; Piljek, P.; Pavković, D. On-line Inertia Measurement of Unmanned Aerial Vehicles using on board Sensors and Bifilar Pendulum. Interdiscip. Complex Syst. INDECS 2018, 16, 149–161. [Google Scholar] [CrossRef] [Green Version]
- Jardin, M.R.; Mueller, E.R. Optimized Measurements of Unmanned-Air-Vehicle Mass Moment of Inertia with a Bifilar Pendulum. J. Aircr. 2009, 46, 763–775. [Google Scholar] [CrossRef]
- Then, J.W. Bifilar Pendulum-An Experimental Study for the Advanced Laboratory. Am. J. Phys. 1965, 33, 545–547. [Google Scholar] [CrossRef]




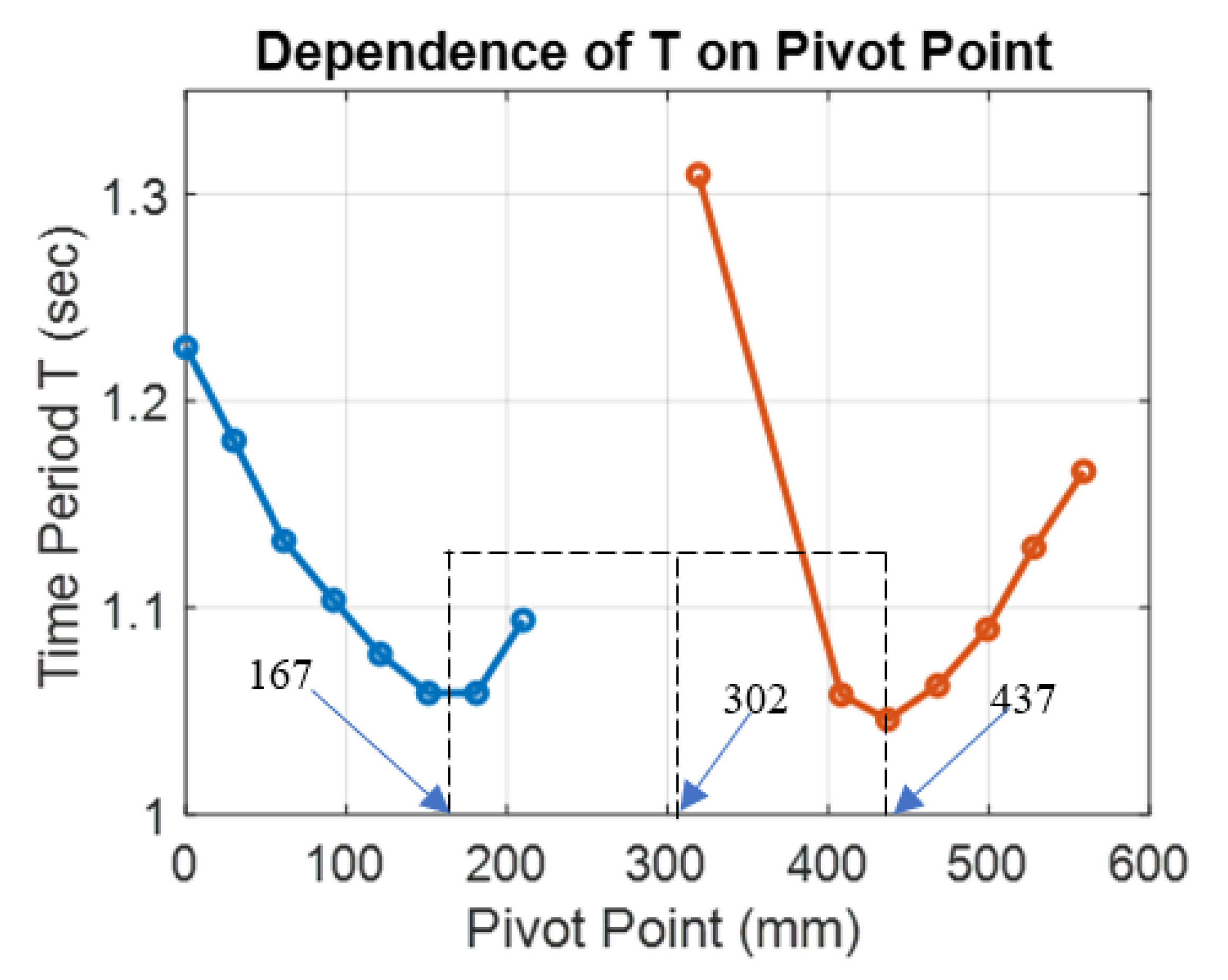






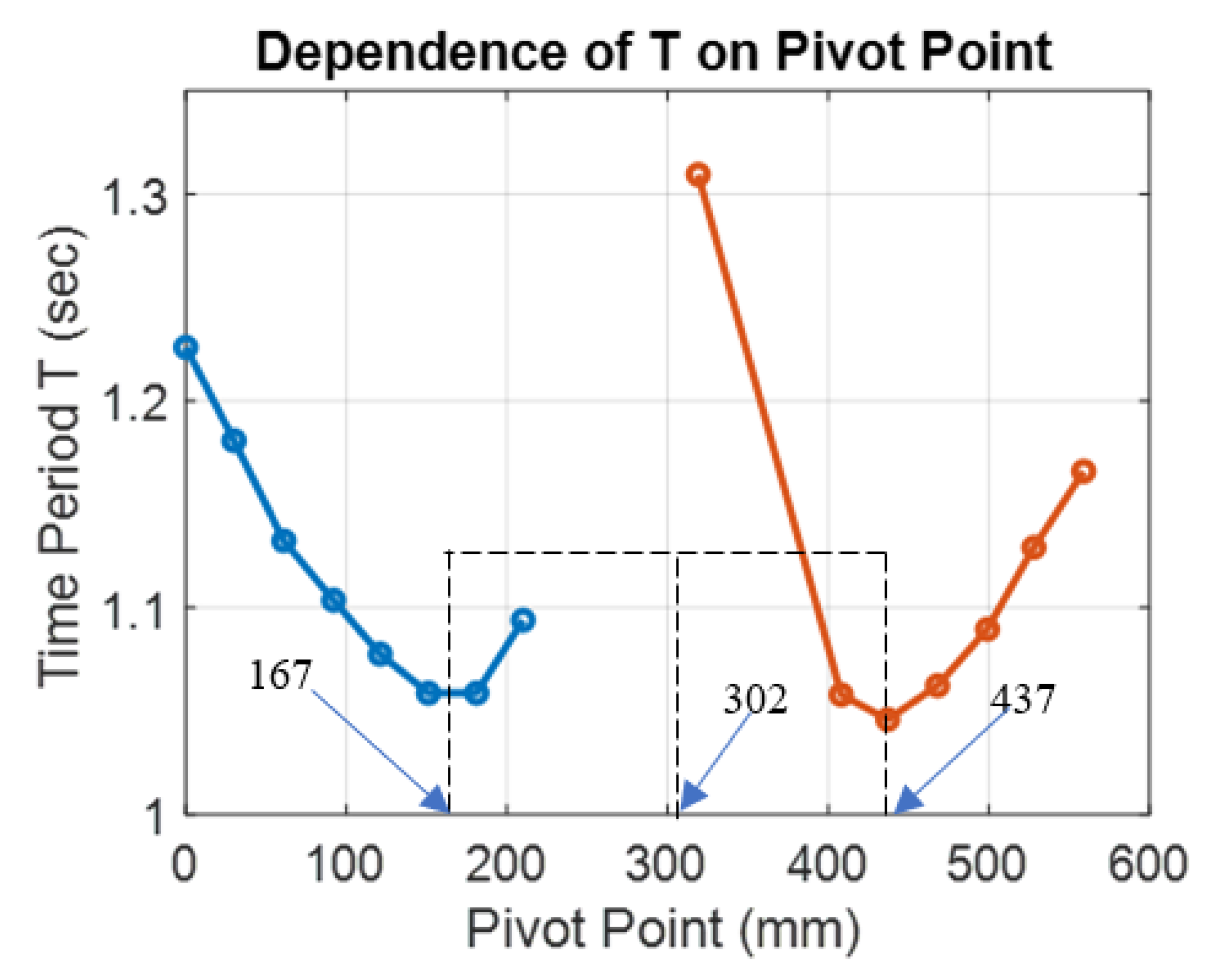
| Number | Coordinate (mm) | Time Period T (sec) |
|---|---|---|
| 1 | 0 | 1.226 |
| 2 | 30 | 1.1808 |
| 3 | 61 | 1.1324 |
| 4 | 92 | 1.1036 |
| 5 | 121 | 1.0776 |
| 6 | 151 | 1.0588 |
| 7 | 181 | 1.0588 |
| 8 | 210 | 1.094 |
| 9 | 319 | 1.3096 |
| 10 | 408 | 1.058 |
| 11 | 437 | 1.046 |
| 12 | 468 | 1.0624 |
| 13 | 499 | 1.0896 |
| 14 | 528 | 1.1292 |
| 15 | 559 | 1.166 |
| Description of Item | Symbol | Value |
|---|---|---|
| Total Quadcopter mass | m | 1.585 kg |
| Distance between pivot at the pitch axis and COM | dp | 57.62 mm |
| Distance between pivot at the roll axis and COM | dr | 57.816 m |
| Period of oscillation about the pitch axis | Tp | 1.026 s |
| Period of oscillation about the roll axis | Tr | 1.055 s |
| Description of Item | Symbol | Inertia Values (kg·m2) | |
|---|---|---|---|
| Pitch Axis | Roll Axis | ||
| Axis through Pivot point | I | 0.023899 | 0.025326 |
| Axis through COM | 0.018636482 | 0.020027499 | |
| Description of Item | Symbol | Value |
|---|---|---|
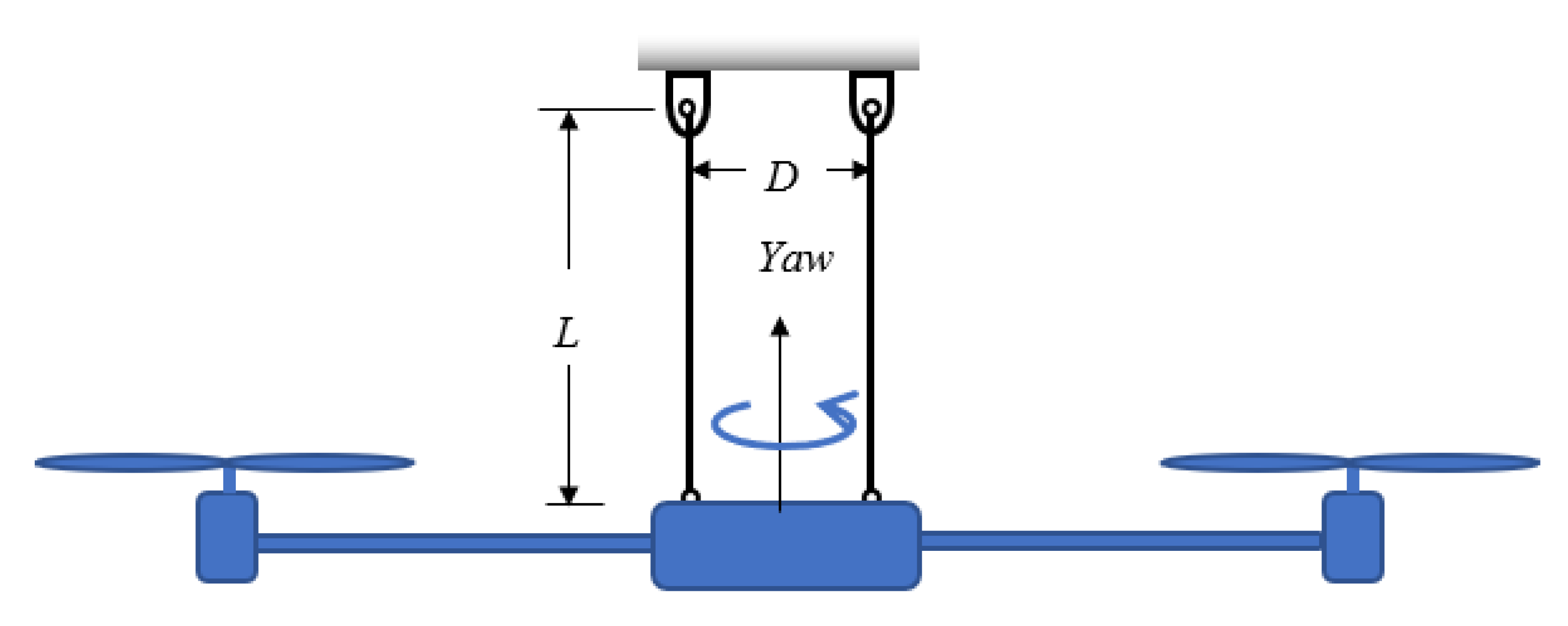
| distance between the two suspension cables (see Figure 9) | D | 0.146 m |
| length of the suspension cable (see Figure 9) | L | 1.066 m |
| Period of oscillation about the yaw axis | T | 3.7608 s |
| Moment of inertia about the yaw axis (axis through COM) | Iyaw | 0.02788 kg·m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukras, S.M.S.; Omar, H.M. Development of a 6-DOF Testing Platform for Multirotor Flying Vehicles with Suspended Loads. Aerospace 2021, 8, 355. https://doi.org/10.3390/aerospace8110355
Mukras SMS, Omar HM. Development of a 6-DOF Testing Platform for Multirotor Flying Vehicles with Suspended Loads. Aerospace. 2021; 8(11):355. https://doi.org/10.3390/aerospace8110355
Chicago/Turabian StyleMukras, Saad M. S., and Hanafy M. Omar. 2021. "Development of a 6-DOF Testing Platform for Multirotor Flying Vehicles with Suspended Loads" Aerospace 8, no. 11: 355. https://doi.org/10.3390/aerospace8110355
APA StyleMukras, S. M. S., & Omar, H. M. (2021). Development of a 6-DOF Testing Platform for Multirotor Flying Vehicles with Suspended Loads. Aerospace, 8(11), 355. https://doi.org/10.3390/aerospace8110355