
Aerodynamic Performance of a Nanostructure-Induced Multistable Shell


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
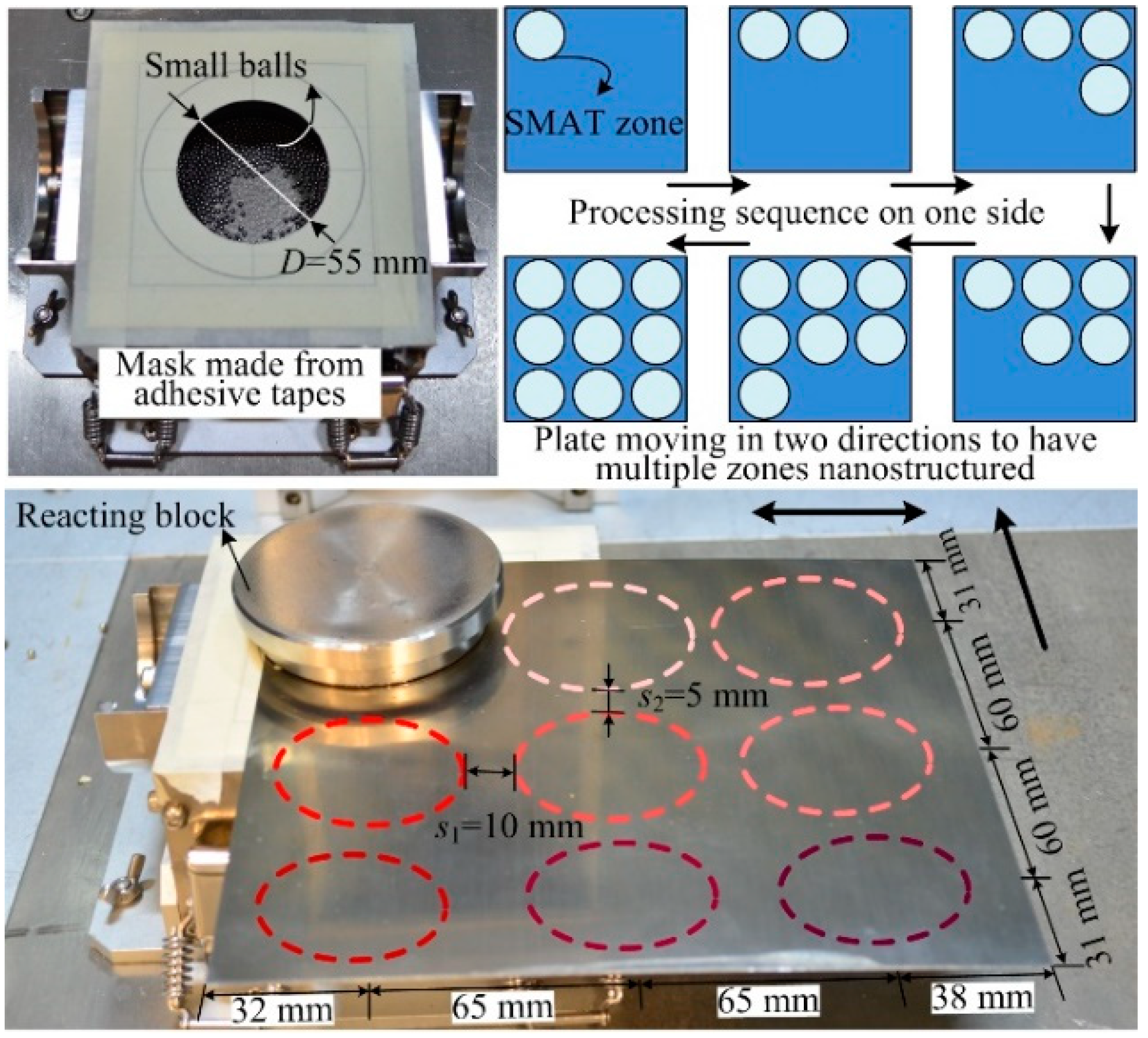
2.1. Manufacture of the Multistable Shell
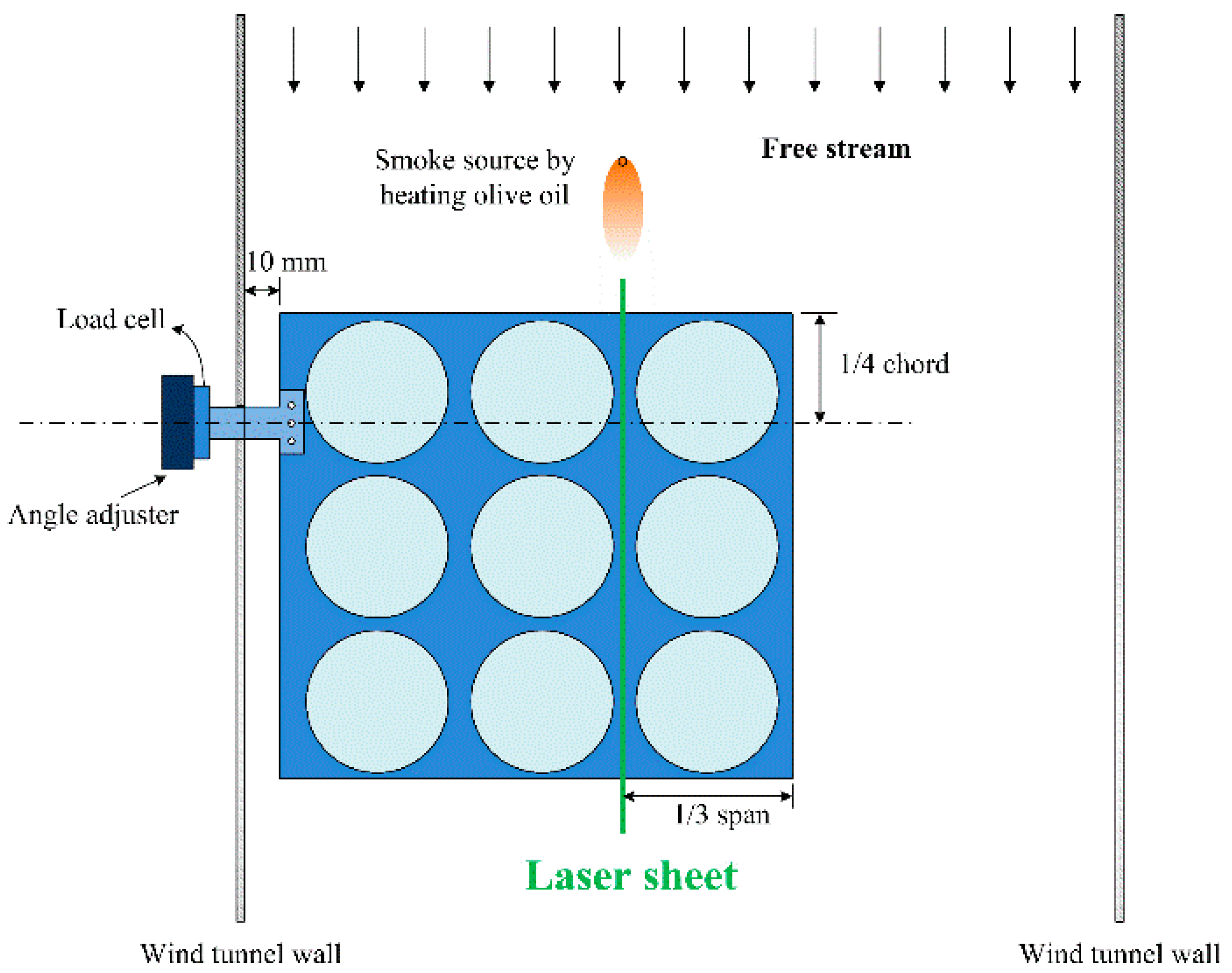
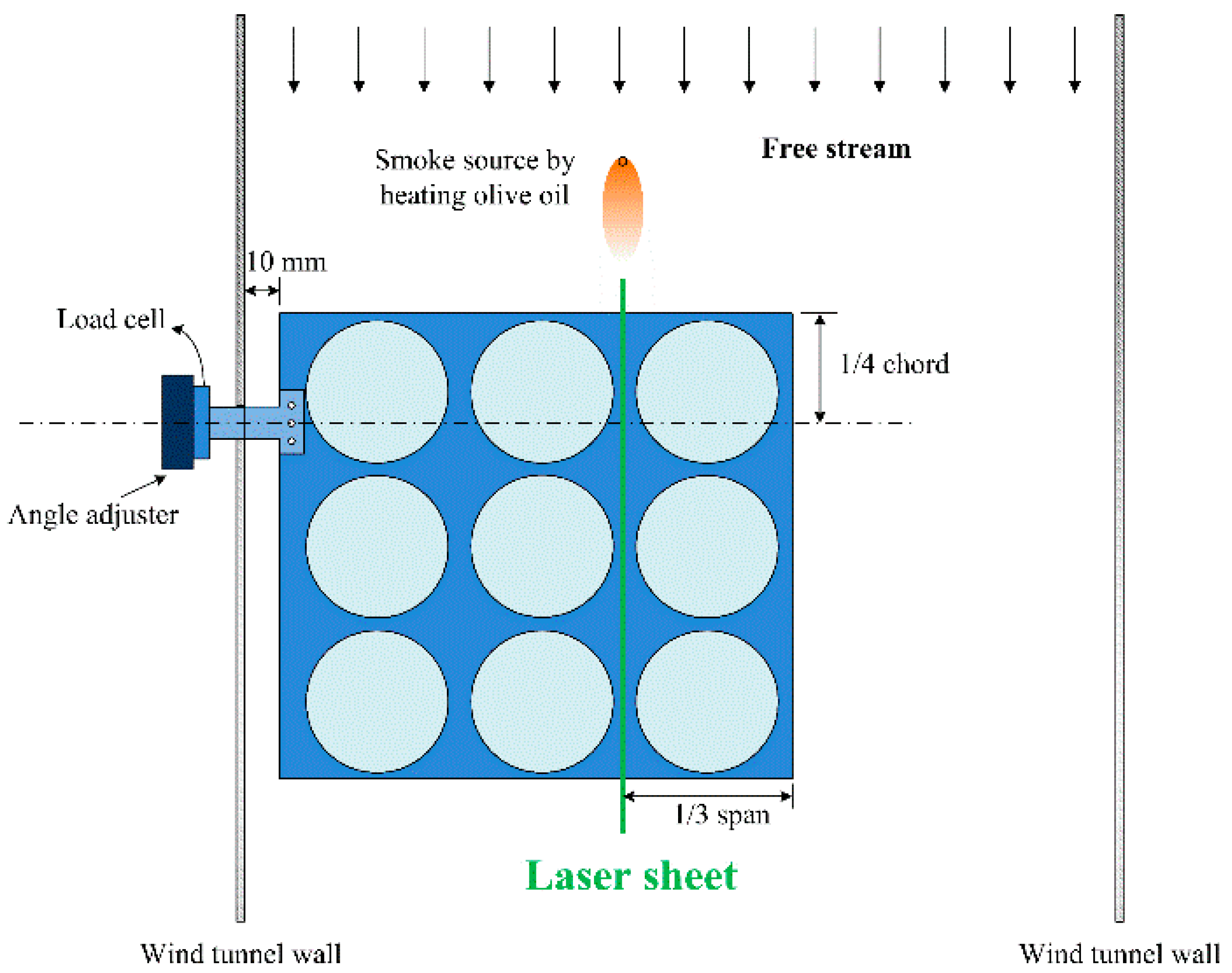
2.2. Aerodynamic Experiment Setup
3. Results and Discussions
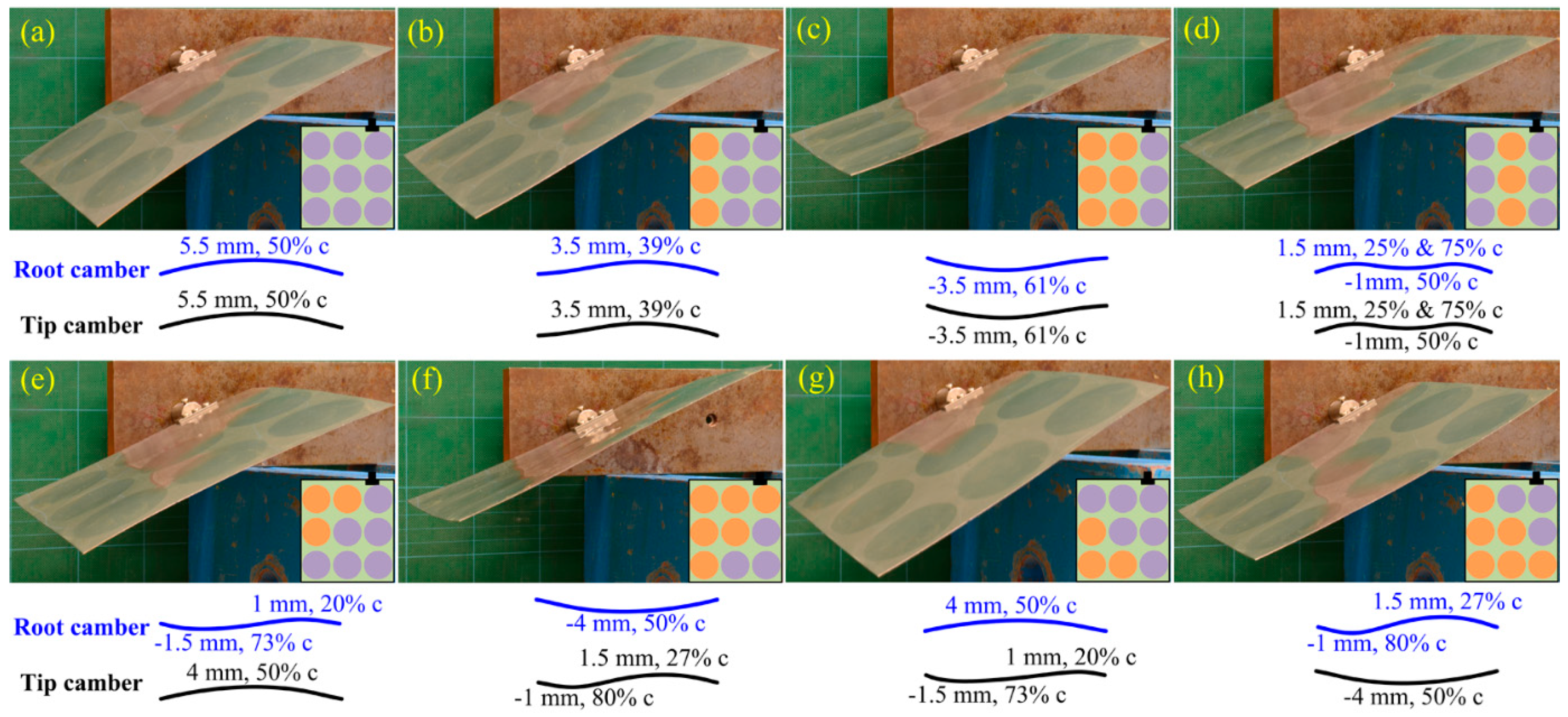
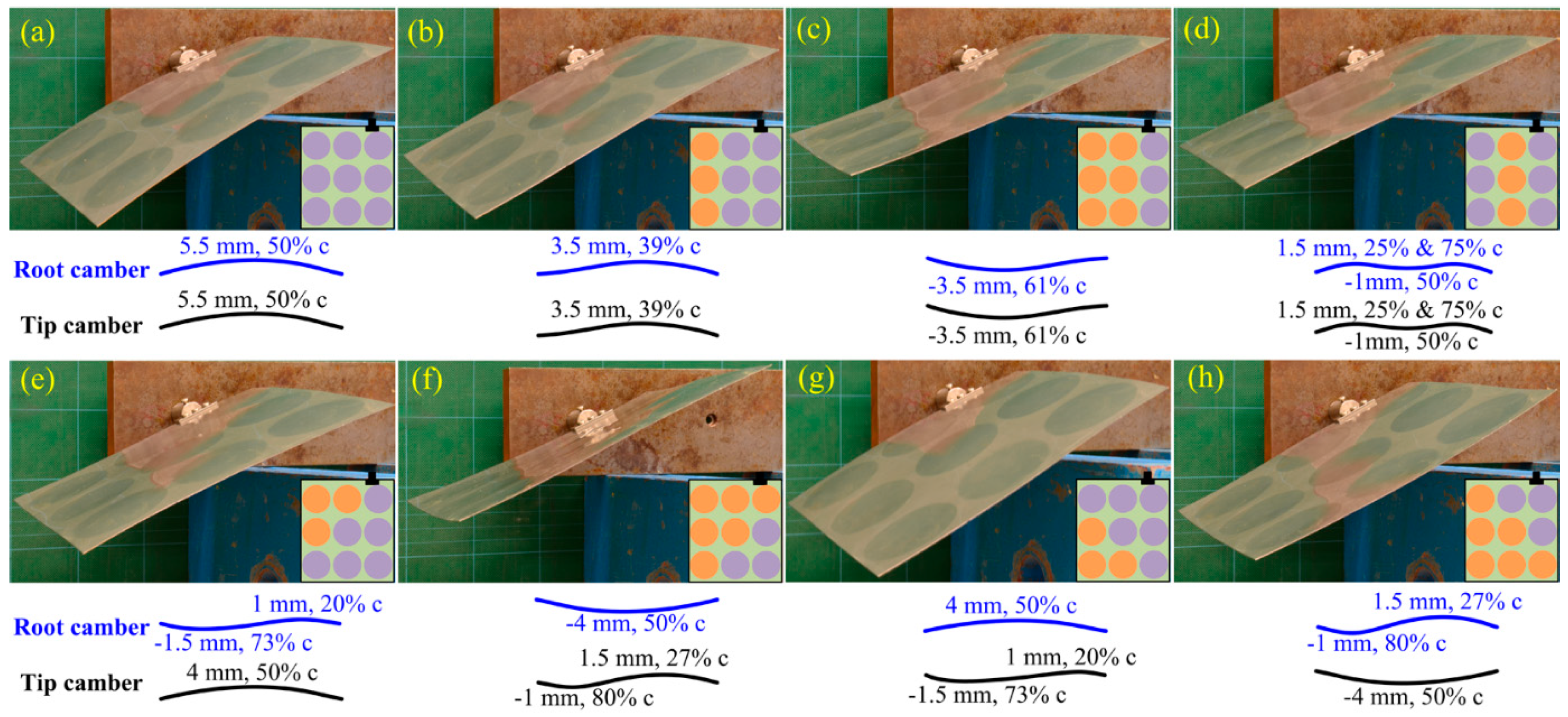
3.1. Flow Visualization in Various Stable Configurations
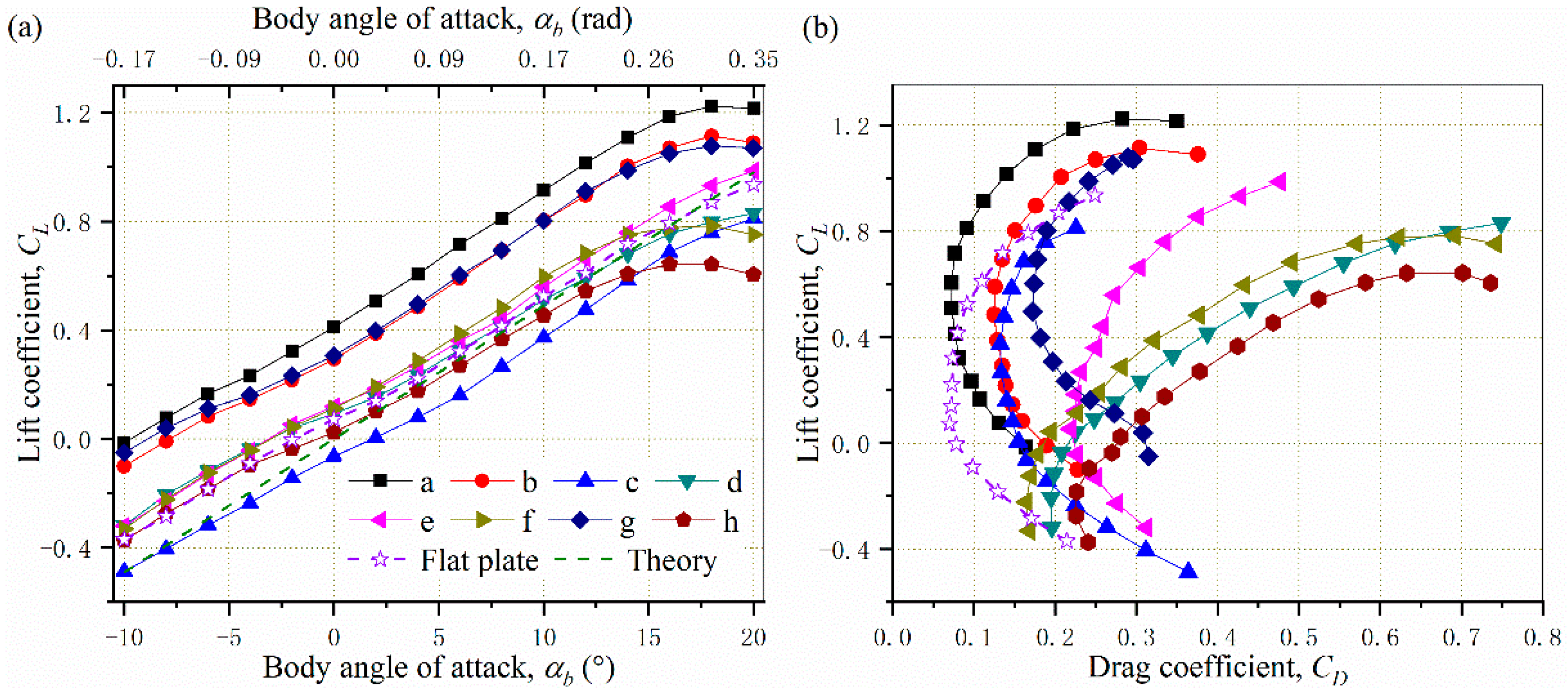
3.2. Lift and Drag Coefficients
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Arena, M.; Amoroso, F.; Pecora, R.; Ameduri, S. Electro-actuation system strategy for a morphing flap. Aerospace 2019, 6, 1. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Zhang, X.F.; Chen, X.L.; He, Y.H.; Cheng, L.Z.; Huo, M.K.; Yin, J.A.; Hao, F.Q.; Chen, S.Y.; Wang, P.Y.; et al. Additive manufacturing of structural materials. Mater. Sci. Eng. R. Rep. 2021, 145, 100596. [Google Scholar] [CrossRef]
- Bishay, P.L.; Aguilar, C. Parametric study of a composite skin for a twist-morphing wing. Aerospace 2021, 8, 259. [Google Scholar] [CrossRef]
- Meyer, P.; Lück, S.; Spuhler, T.; Bode, C.; Hühne, C.; Friedrichs, J.; Sinapius, M. Transient Dynamic System Behavior of Pressure Actuated Cellular Structures in a Morphing Wing. Aerospace 2021, 8, 89. [Google Scholar] [CrossRef]
- Kuder, I.K.; Arrieta, A.F.; Raither, W.E.; Ermanni, P. Variable stiffness material and structural concepts for morphing applications. Prog. Aerosp. Sci. 2013, 63, 33–55. [Google Scholar] [CrossRef]
- Seffen, K.A. Hierarchical multi-stable shapes in mechanical memory metal. Scr. Mater. 2007, 56, 417–420. [Google Scholar] [CrossRef]
- Coburn, B.H.; Pirrera, A.; Weaver, P.M.; Vidoli, S. Tristability of an orthotropic doubly curved shell. Compos. Struct. 2013, 96, 446–454. [Google Scholar] [CrossRef]
- Betts, D.N.; Kim, H.A.; Bowen, C.R. Optimization of stiffness characteristics for the design of bistable composite laminates. AIAA J. 2012, 50, 2211–2218. [Google Scholar] [CrossRef]
- Arrieta, A.F.; Bilgen, O.; Friswell, M.I.; Ermanni, P. Modelling and configuration control of wing-shaped bi-stable piezoelectric composites under aerodynamic loads. Aerosp. Sci. Technol. 2013, 29, 453–461. [Google Scholar] [CrossRef] [Green Version]
- Daynes, S.; Weaver, P.M.; Trevarthen, J.A. A morphing composite air inlet with multiple stable shapes. J. Intell. Mater. Syst. Struct. 2011, 22, 961–973. [Google Scholar] [CrossRef]
- Forterre, Y.; Skotheim, J.M.; Dumais, J.; Mahadevan, L. How the Venus flytrap snaps. Nature 2005, 433, 421–425. [Google Scholar] [CrossRef] [PubMed]
- Dano, M.L.; Jean-St-Laurent, M.; Fecteau, A. Morphing of bistable composite laminates using distributed piezoelectric actuators. Smart Mater. Res. 2012, 2012, 695475. [Google Scholar] [CrossRef]
- Dano, M.L.; Hyer, M.W. SMA-induced snap-through of unsymmetric fiber-reinforced composite laminates. Int. J. Solids Struct. 2003, 40, 5949–5972. [Google Scholar] [CrossRef]
- Li, H.; Dai, F.H.; Du, S.Y. Numerical and experimental study on morphing bi-stable composite laminates actuated by a heating method. Compos. Sci. Technol. 2012, 72, 1767–1773. [Google Scholar] [CrossRef]
- Schultz, M.R.; Wilkie, W.K.; Bryant, R.G. Investigation of self-resetting active multistable laminates. J. Aircr. 2007, 44, 1069–1076. [Google Scholar] [CrossRef]
- Eckstein, E.; Pirrera, A.; Weaver, P.M. Thermally driven morphing and snap-through behavior of hybrid laminate shells. AIAA J. 2016, 54, 1778–1788. [Google Scholar] [CrossRef] [Green Version]
- Simsek, M.R.; Bilgen, O. Hybrid position feedback controller for inducing cross-well motion of bistable structures. AIAA J. 2016, 54, 4011–4021. [Google Scholar] [CrossRef]
- Gatto, A.; Mattioni, F.; Friswell, M.I. Experimental investigation of bistable winglets to enhance wing lift takeoff capability. J. Aircr. 2009, 46, 647–655. [Google Scholar] [CrossRef]
- Daynes, S.; Nall, S.J.; Weaver, P.M.; Potter, K.D.; Margaris, P.; Mellor, P.H. Bistable composite flap for an airfoil. J. Aircr. 2010, 47, 334–338. [Google Scholar] [CrossRef]
- Seffen, K.A.; Maurini, C. Growth and shape control of disks by bending and extension. J. Mech. Phys. Solids 2013, 61, 190–204. [Google Scholar] [CrossRef] [Green Version]
- Dai, F.H.; Li, H.; Du, S.Y. A multi-stable lattice structure and its snap-through behavior among multiple states. Compos. Struct. 2013, 97, 56–63. [Google Scholar] [CrossRef]
- Cui, Y.F.; Santer, M. Highly multistable composite surfaces. Compos. Struct. 2015, 124, 44–54. [Google Scholar] [CrossRef] [Green Version]
- Cui, Y.F.; Santer, M. Characterisation of tessellated bistable composite laminates. Compos. Struct. 2016, 137, 93–104. [Google Scholar] [CrossRef] [Green Version]
- Chan, H.L.; Ruan, H.H.; Chen, A.Y.; Lu, J. Optimization of the strain rate to achieve exceptional mechanical properties of 304 stainless steel using high speed ultrasonic surface mechanical attrition treatment. Acta Mater. 2010, 58, 5086–5096. [Google Scholar] [CrossRef]
- Liu, X.W.; Sun, L.G.; Zhu, L.L.; Liu, J.B.; Lu, K.; Lu, J. High-order hierarchical nanotwins with superior strength and ductility. Acta Mater. 2018, 149, 397–406. [Google Scholar] [CrossRef]
- Ya, M.; Xing, Y.M.; Dai, F.L.; Lu, K.; Lu, J. Study of residual stress in surface nanostructured AISI 316L stainless steel using two mechanical methods. Surf. Coat. Technol. 2003, 168, 148–155. [Google Scholar] [CrossRef]
- Yi, S.H.; He, X.Q.; Lu, J. Bistable metallic materials by nanocrystallization process. Mater. Des. 2018, 141, 374–383. [Google Scholar] [CrossRef]
- Crimi, P.; Reeves, B.L. Analysis of leading-edge separation bubbles on airfoils. AIAA J. 1976, 14, 1548–1555. [Google Scholar] [CrossRef]
- O’Meara, M.M.; Mueller, T.J. Laminar separation bubble characteristics on an airfoil at low Reynolds numbers. AIAA J. 1987, 25, 1033–1041. [Google Scholar] [CrossRef]
- Anderson, J. Fundamentals of Aerodynamics, 6th ed.; McGraw-Hill Education: New York, NY, USA, 2017. [Google Scholar]
- Fink, R.D. USAF Stability and Control DATCOM; Wright-Patterson AFB: Fairborn, OH, USA, 1975. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, S.; Shen, L.; Wen, C.-Y.; He, X.; Lu, J. Aerodynamic Performance of a Nanostructure-Induced Multistable Shell. Aerospace 2021, 8, 350. https://doi.org/10.3390/aerospace8110350
Yi S, Shen L, Wen C-Y, He X, Lu J. Aerodynamic Performance of a Nanostructure-Induced Multistable Shell. Aerospace. 2021; 8(11):350. https://doi.org/10.3390/aerospace8110350
Chicago/Turabian StyleYi, Shenghui, Lu Shen, Chih-Yung Wen, Xiaoqiao He, and Jian Lu. 2021. "Aerodynamic Performance of a Nanostructure-Induced Multistable Shell" Aerospace 8, no. 11: 350. https://doi.org/10.3390/aerospace8110350
APA StyleYi, S., Shen, L., Wen, C.-Y., He, X., & Lu, J. (2021). Aerodynamic Performance of a Nanostructure-Induced Multistable Shell. Aerospace, 8(11), 350. https://doi.org/10.3390/aerospace8110350