
Research on Control of Stewart Platform Integrating Small Attitude Maneuver and Vibration Isolation for High-Precision Payloads on Spacecraft



Abstract
1. Introduction
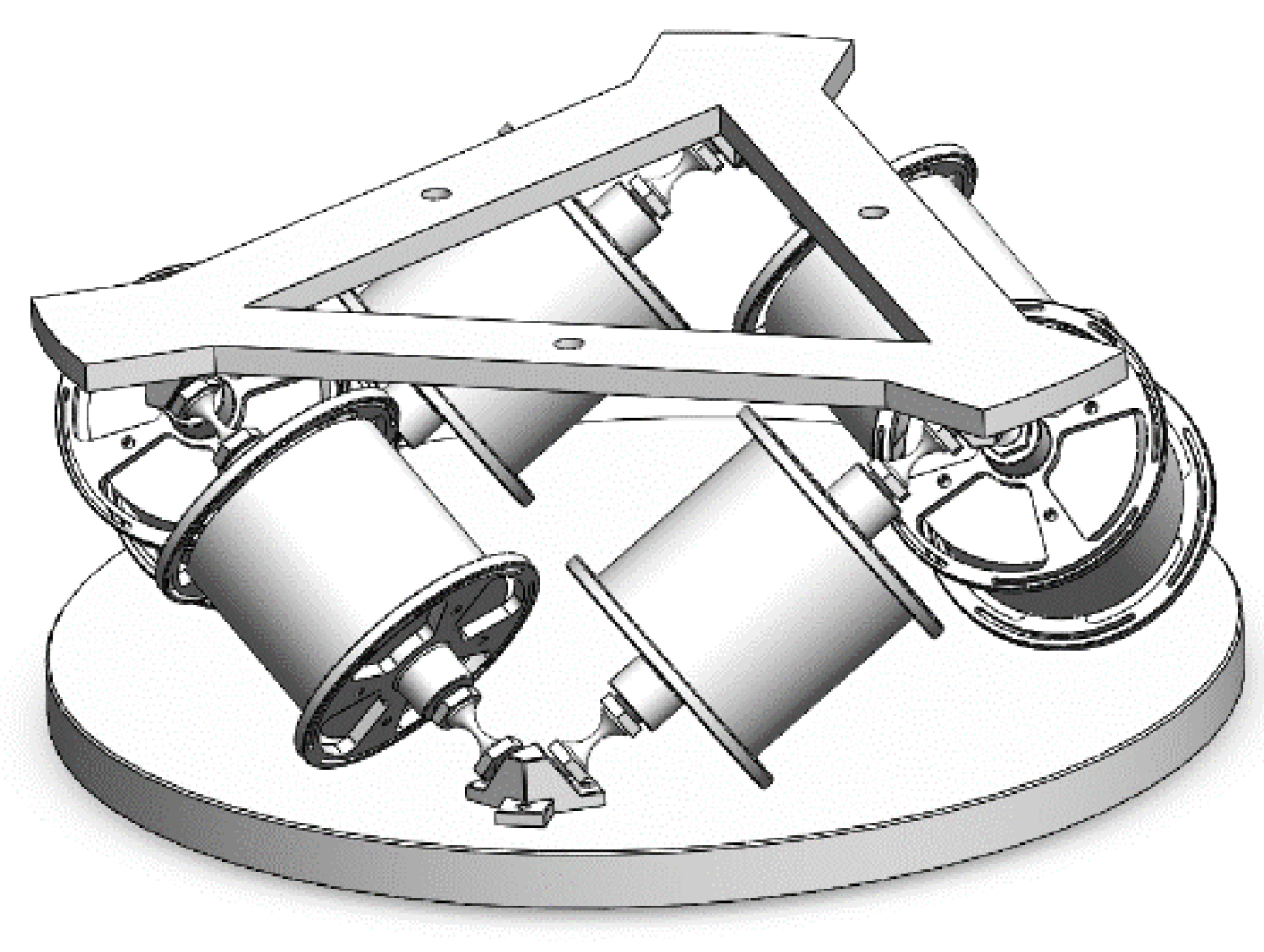
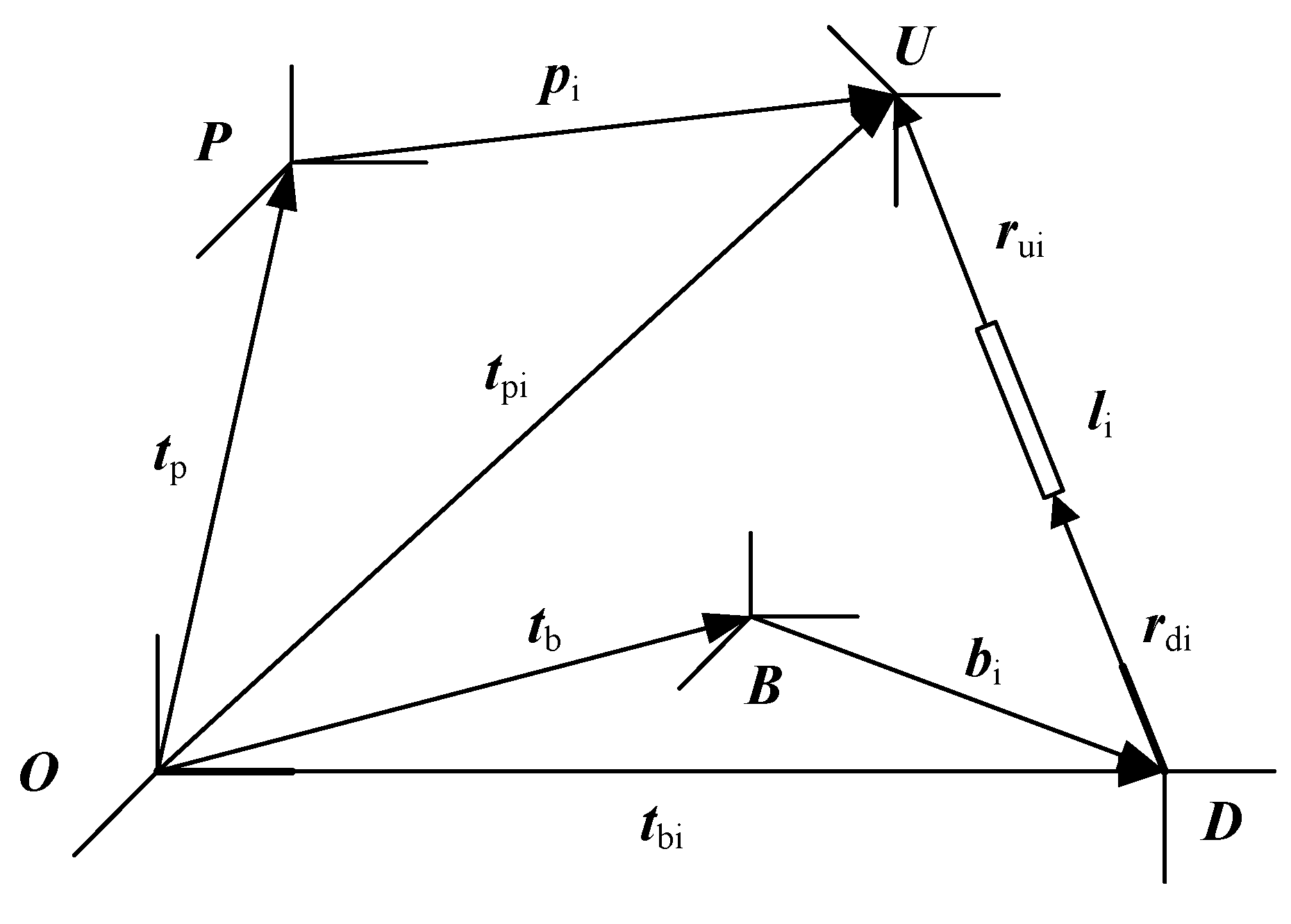
2. Platform Design and Dynamics of the Legs
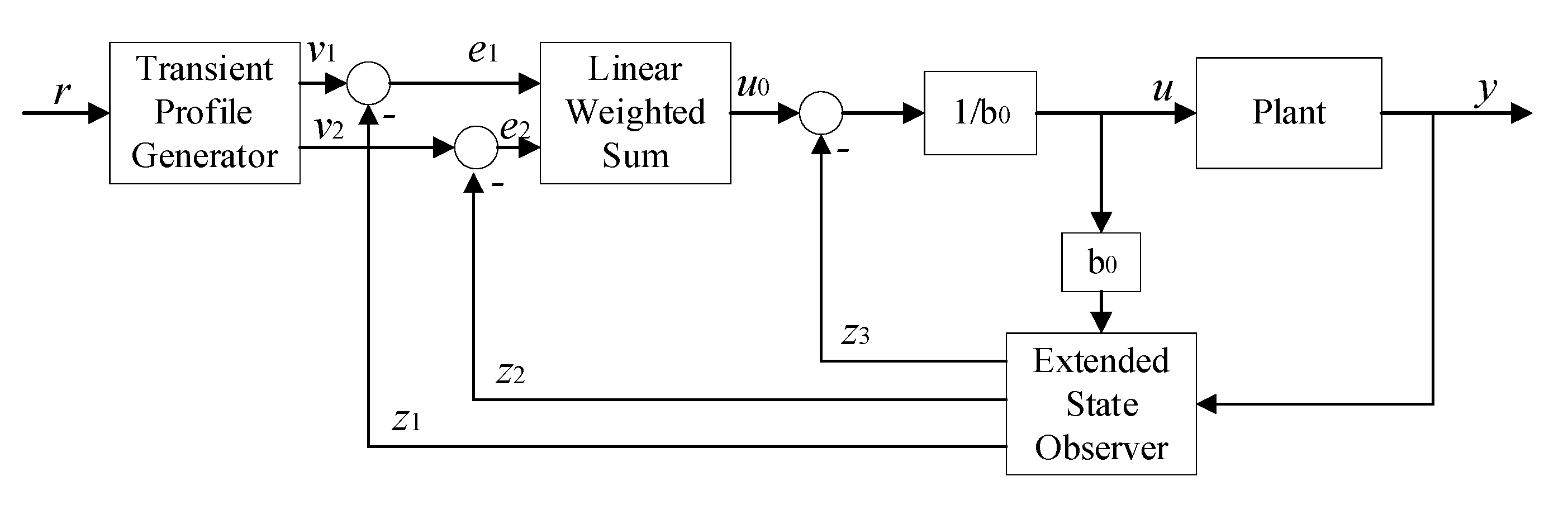
3. Design for the Integrated Attitude-Vibration Control System
3.1. Estimation of the States and the Total Disturbance
3.2. Removing the Total Disturbance by Feedback Linearization
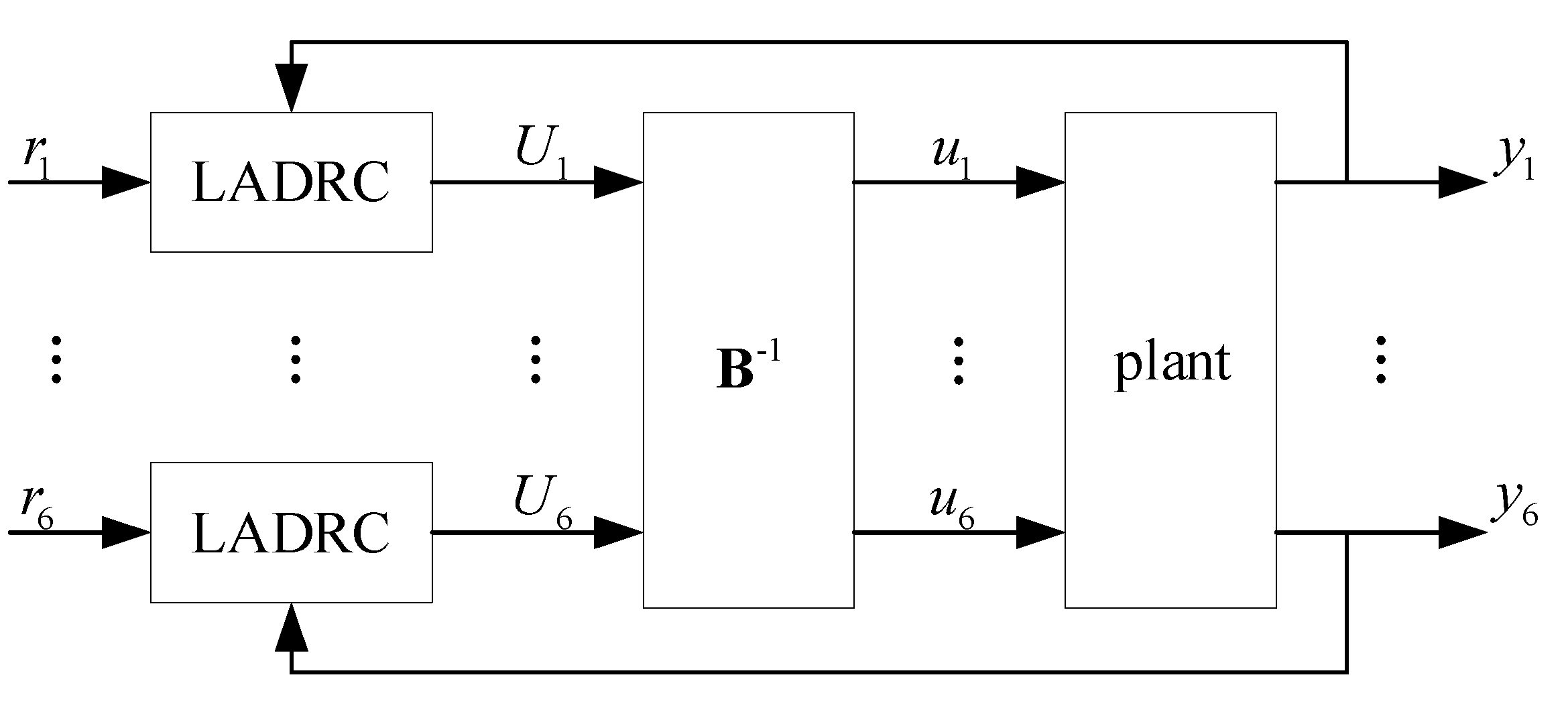
3.3. Decoupling Control of the Legs
4. Results and Discussion
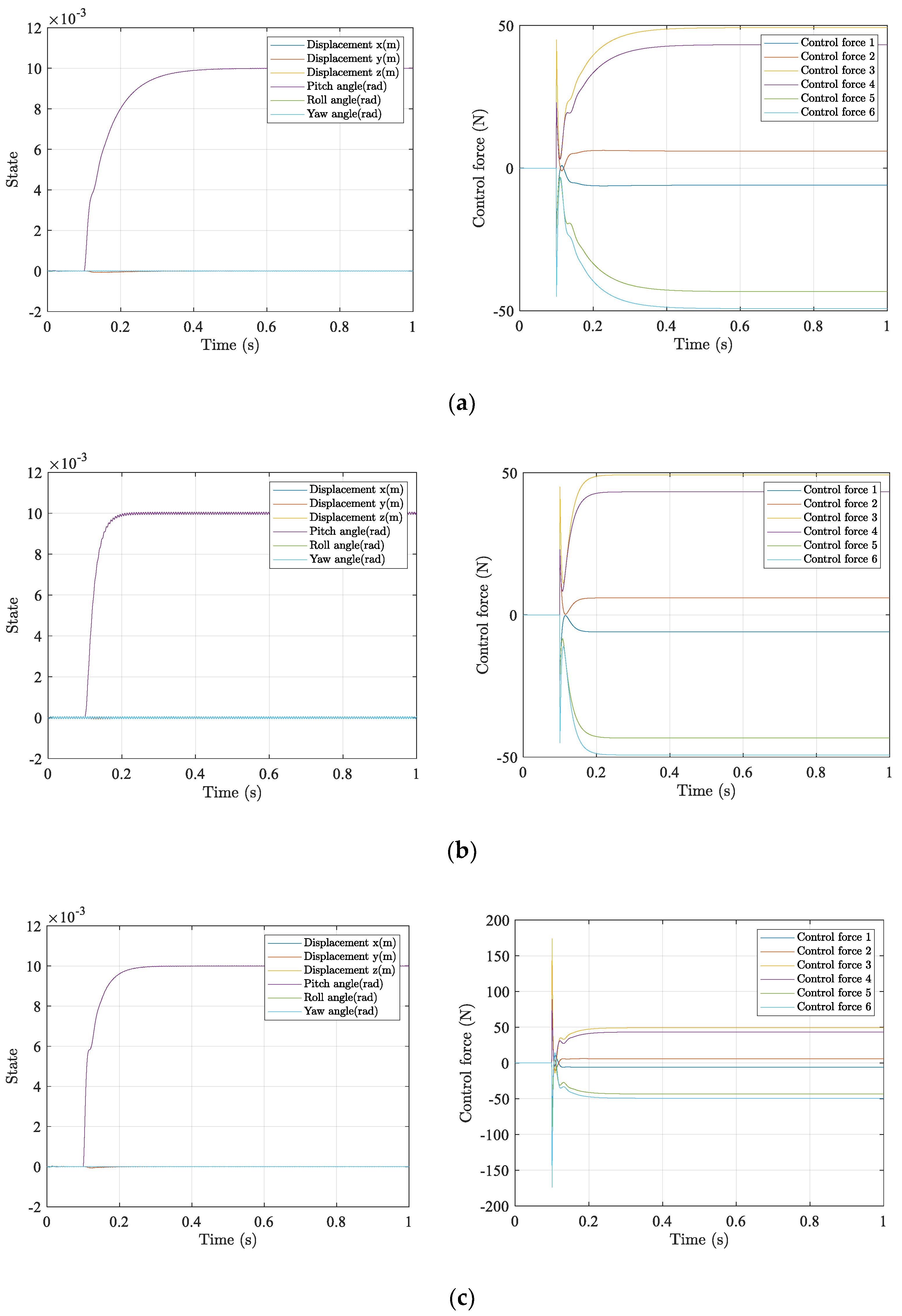
4.1. Attitude Maneuver Performance
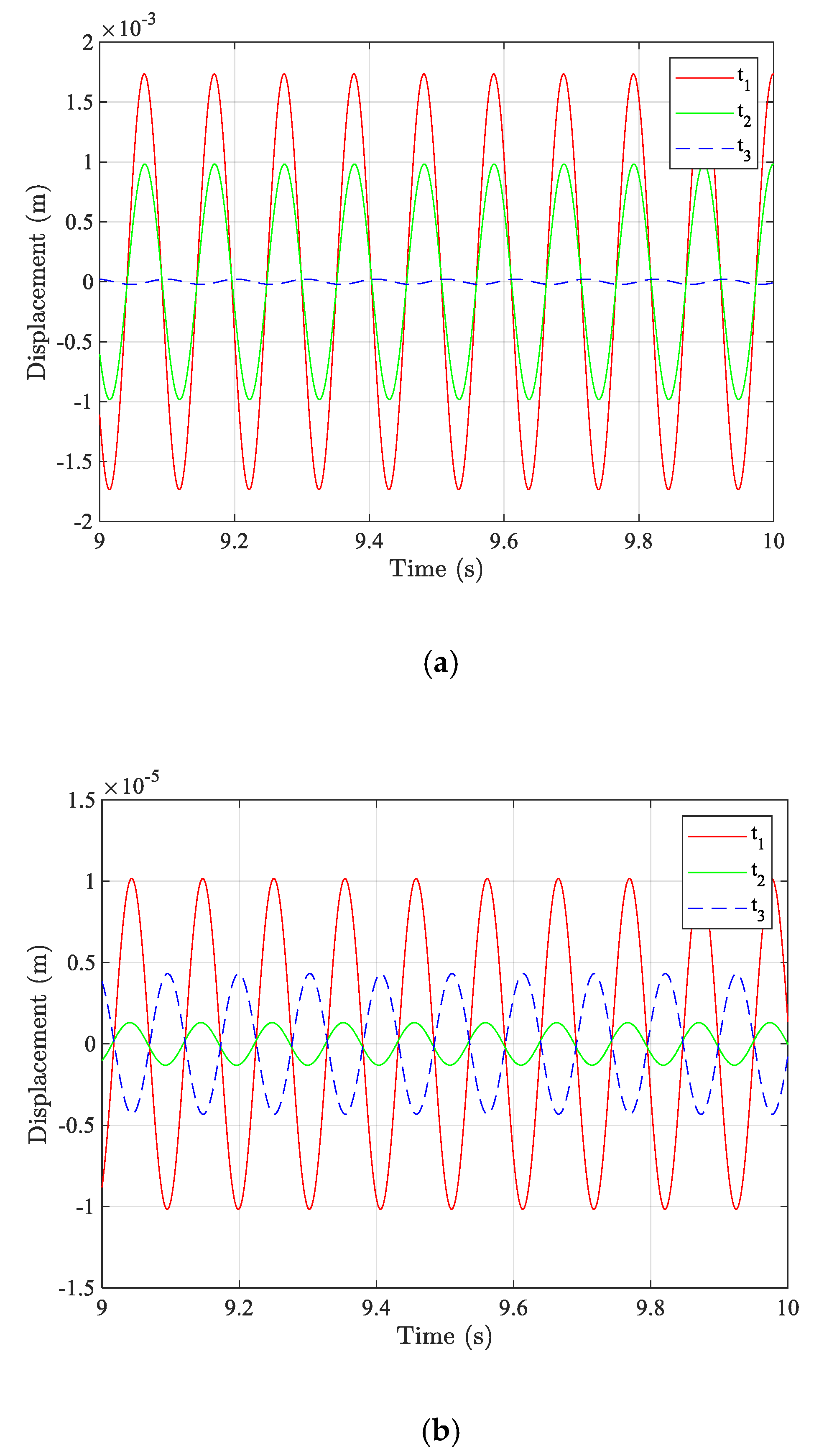
4.2. Vibration Isolation Performance
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhao, T.Y.; Jiang, L.P.; Pan, H.G.; Yang, J.; Kitipornchai, S. Coupled free vibration of a functionally graded pre-twisted blade-shaft system reinforced with graphene nanoplatelets. Compos. Struct. 2020, 262, 113362. [Google Scholar] [CrossRef]
- Zhao, T.Y.; Ma, Y.; Zhang, H.Y.; Pan, H.G.; Cai, Y. Free vibration analysis of a rotating graphene nanoplatelet reinforced pre-twist blade-disk assembly with a setting angle. Appl. Math. Model. 2021, 93, 578–596. [Google Scholar] [CrossRef]
- Zhao, T.Y.; Cui, Y.S.; Pan, H.G.; Yuan, H.Q.; Yang, J. Free vibration analysis of a functionally graded graphene nanoplatelet reinforced disk-shaft assembly with whirl motion. Int. J. Mech. Sci. 2021, 197, 106335. [Google Scholar] [CrossRef]
- Furqan, M.; Suhaib, M.; Ahmad, N. Studies on Stewart platform manipulator: A review. J. Mech. Sci. Technol. 2017, 31, 4459–4470. [Google Scholar] [CrossRef]
- Stewart, D. A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Geng, Z.J.; Haynes, L.S. Six degree-of-freedom active vibration control using the Stewart platforms. IEEE Trans. Control Syst. Technol. 1994, 2, 45–53. [Google Scholar] [CrossRef]
- Zhou, W.; Chen, W.; Liu, H.; Li, X. A new forward kinematic algorithm for a general Stewart platform. Mech. Mach. Theory 2015, 87, 177–190. [Google Scholar] [CrossRef]
- Liu, C.; Jing, X.; Daley, S.; Li, F. Recent advances in micro-vibration isolation. Mech. Syst. Signal Process. 2015, 56-57, 55–80. [Google Scholar] [CrossRef]
- Lin, H.; McInroy, J. Adaptive sinusoidal disturbance cancellation for precise pointing of stewart platforms. IEEE Trans. Control Syst. Technol. 2003, 11, 267–272. [Google Scholar] [CrossRef]
- Preumont, A.; Horodinca, M.; Romanescu, I.; de Marneffe, B.; Avraam, M.; Deraemaeker, A.; Bossens, F.; Abu Hanieh, A. A six-axis single-stage active vibration isolator based on Stewart platform. J. Sound Vib. 2007, 300, 644–661. [Google Scholar] [CrossRef]
- Thayer, D.; Campbell, M.; Vagners, J.; Von Flotow, A. Six-Axis Vibration Isolation System Using Soft Actuators and Multiple Sensors. J. Spacecr. Rocket. 2002, 39, 206–212. [Google Scholar] [CrossRef]
- Chi, W.; Ma, S.J.; Sun, J.Q. A hybrid multi-degree-of-freedom vibration isolation platform for spacecrafts by the linear active disturbance rejection control. Appl. Math. Mech. 2020, 41, 805–818. [Google Scholar] [CrossRef]
- Leeghim, H.; Jin, J.; Mok, S.-H. Feasible angular momentum of spacecraft installed with control moment gyros. Adv. Space Res. 2018, 61, 466–477. [Google Scholar] [CrossRef]
- Jingrui, Z.; Jin, J.; Zaozhen, L. Adaptive Spacecraft Attitude Tracking and Parameter Estimation with Actuator Uncertainties. J. Aerosp. Eng. 2014, 27, 04014022. [Google Scholar] [CrossRef]
- Jingrui, Z.; Jin, J.; Zaozhen, L. An improved installation for control moment gyros and its applications on reconfiguration and singular escape. Acta Astronaut. 2013, 85, 93–99. [Google Scholar] [CrossRef]
- Yu, Y.; Meng, X.; Li, K.; Xiong, F. Robust Control of Flexible Spacecraft during Large-Angle Attitude Maneuver. J. Guid. Control Dyn. 2014, 37, 1027–1033. [Google Scholar] [CrossRef]
- Ali, I.; Radice, G.; Kim, J. Backstepping Control Design with Actuator Torque Bound for Spacecraft Attitude Maneuver. J. Guid. Control Dyn. 2010, 33, 254–259. [Google Scholar] [CrossRef]
- Kawajiri, S.; Matunaga, S. A low-complexity attitude control method for large-angle agile maneuvers of a spacecraft with control moment gyros. Acta Astronaut. 2017, 139, 486–493. [Google Scholar] [CrossRef]
- Masterson, R.; Miller, D.; Grogan, R. Development and Validation of Reaction Wheel Disturbance Models: Empirical Model. J. Sound Vib. 2002, 249, 575–598. [Google Scholar] [CrossRef]
- Maghami, P.G.; Gupta, S.; Elliott, K.B.; Joshi, S.M. Integrated controls-structures design methodology—Redesign of an evolutionary test structure. J. Guid. Control Dyn. 1996, 19, 316–323. [Google Scholar] [CrossRef][Green Version]
- Narayan, S.S.; Nair, P.; Ghosal, A. Dynamic interaction of rotating momentum wheels with spacecraft elements. J. Sound Vib. 2008, 315, 970–984. [Google Scholar] [CrossRef]
- Yao, Z.; Jingrui, Z.; Shijie, X. Parameters design of vibration isolation platform for control moment gyroscopes. Acta Astronaut. 2012, 81, 645–659. [Google Scholar] [CrossRef]
- Zheng, Q.; Gao, Z. Active disturbance rejection control: Some recent experimental and industrial case studies. Control Theory Technol. 2018, 16, 301–313. [Google Scholar] [CrossRef]
- Zhou, Y.; Luo, D.; Wu, B.; Cheng, B.; Lin, Q. Active vibration isolation system based on the LADRC algorithm for atom interferometry. Appl. Opt. 2020, 59, 3487–3493. [Google Scholar] [CrossRef] [PubMed]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
| Upper platform radius | 0.165 m |
| Height | 0.079 m |
| Legs length | 0.162 m |
| Stiffness of diaphragm spring | |
| Mass of top platform | 3.29 kg |
| Mass of payload | 4.85 kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chi, W.; Ma, H.; Wang, C.; Zhao, T. Research on Control of Stewart Platform Integrating Small Attitude Maneuver and Vibration Isolation for High-Precision Payloads on Spacecraft. Aerospace 2021, 8, 333. https://doi.org/10.3390/aerospace8110333
Chi W, Ma H, Wang C, Zhao T. Research on Control of Stewart Platform Integrating Small Attitude Maneuver and Vibration Isolation for High-Precision Payloads on Spacecraft. Aerospace. 2021; 8(11):333. https://doi.org/10.3390/aerospace8110333
Chicago/Turabian StyleChi, Weichao, He Ma, Caihua Wang, and Tianyu Zhao. 2021. "Research on Control of Stewart Platform Integrating Small Attitude Maneuver and Vibration Isolation for High-Precision Payloads on Spacecraft" Aerospace 8, no. 11: 333. https://doi.org/10.3390/aerospace8110333
APA StyleChi, W., Ma, H., Wang, C., & Zhao, T. (2021). Research on Control of Stewart Platform Integrating Small Attitude Maneuver and Vibration Isolation for High-Precision Payloads on Spacecraft. Aerospace, 8(11), 333. https://doi.org/10.3390/aerospace8110333