1. Introduction
Modern computation capabilities and the widespread use of high augmentation in the flight control systems of aerospace vehicles have been accompanied by research of new approaches to control algorithm design, making use of the available technology. The inverse dynamics technique is one of those control algorithms developed in recent years that make it possible to considerably change the dynamics of an aircraft, making the control problem easier to solve.
Over the years, this technique has been used in a variety of applications both in fixed-wing aircraft [
1,
2] and in rotorcraft [
3,
4].
Robustness is one of the requirements in flight control system designs. Inverse dynamics is very demanding toward this requirement, as they are sensitive to changes in the mathematical models of the controlled element or of the processes affecting the controlled element, such as winds and disturbances. When these uncertainties are present, the inverse dynamics-based controller used in the feedforward loop cannot correct for tracking errors [
5]. In [
6,
7], the author established the boundaries of controlled element uncertainties that would be acceptable when using inverse dynamics. Inverse dynamics would be effective only if the size of the uncertainties in the nominal plant is smaller than the size of the nominal plant divided by its condition number. Here, the size of the plant and the size of the uncertainties are both measured as the 2-norm of their transfer functions. Moreover, the condition number of the plant is the product of the size of the plant and the size of its inverse. The method developed in [
6] allows the use of inverse dynamics only when these boundaries are observed. This makes the technique applicable only to a limited number of control problems.
Inverse dynamics in general can be applied to both linear and nonlinear control problems. As a nonlinear control technique, inverse dynamics is used to make an appropriate coordinate transformation of a nonlinear controlled element [
8] so that any linear control technique can be applied to the resulting linear controlled element. This is illustrated in [
5] and [
9], where nonlinear dynamics inversion is used in the inner loop and a PID-type controller is used in the outer loop to achieve both reference tracking and robustness against modeling uncertainties and disturbances. The same two-loop approach is used in [
10], where the inner loop uses the inverse dynamics technique to linearize the nonlinear plant, and the outer loop uses an H∞-based controller to provide robustness. Flight controllers based on inverse dynamics principles can also be designed using machine learning principles as in [
11], where inverse dynamics is approximated using a nonlinear regression neural network and used in the same fashion as feedback linearization to allow the application of a PI controller.
As a linear control technique, the inverse dynamics method has mostly been used in the feedforward control loop to support feedback controllers. In this form, its integration with reference model techniques has been studied in [
12]. Here, the desired dynamics of the whole system, that is, the controlled element plus the control system, are computed via the use of reference models. The desired computed dynamics are then applied to the inverse dynamics in order to calculate the actuator positions needed to achieve the required performance.
This method, however, still requires an exact model of the controlled aircraft. Therefore, a PID-type compensator must be added in order to provide robustness against modeling uncertainties and disturbances as in [
3].
Inverse dynamics as a linear control method has also been used in [
13] to decouple the dynamics of the controlled element and achieve good tracking performance, and robustness is provided by a reference model and its inverse. This method, however, uses several loops in the control algorithm, making it difficult and expensive to implement.
In [
14], a detailed account of the linear inverse dynamics approach for the improvement of helicopter flying qualities is given, and robustness is achieved using a PI controller.
Another popular approach to the design of flight control systems is the H-infinity method, which appeared in the seminal works of Zames [
15]. This approach takes advantage of singular values to synthesize an optimal controller that minimizes a cost function representing robustness and performance of the system. The H-infinity method has been used extensively for flight control as in [
16], where linear H-infinity-based controllers are used with a gain scheduling method extended for dynamical systems in order to take advantage of the robustness of H-infinity in nonlinear control.
The H-infinity technique has also been applied to all sorts of rotorcraft control problems. In [
17], the technique is applied to a two-degree-of-freedom helicopter using a sensitivity minimization approach, which consists in minimizing the sensitivity of the system to external disturbances, which can also be additive uncertainties. In [
18], the same sensitivity minimization approach of the H-infinity implementation is used to robustly stabilize a helicopter with a suspended load. One of the problems with this approach, however, is that there is no systematic way of choosing the weight matrices that generalize to all control problems.
Another approach used to apply the H-infinity optimization is loop shaping [
19,
20,
21]. The basic idea of this technique is to specify the design requirements in terms of singular values of the open-loop system. Weight matrices are then used to achieve the open-loop requirements before applying the H-infinity optimization procedure to find a controller that satisfies the said requirements.
Inverse dynamics and H-infinity techniques have been used together in [
22,
23]. In both of these cases, they are used in different control loops where inverse dynamics eliminates the need for gain scheduling, and the H-infinity controller designed with additional shaping filters provides reference tracking and robustness.
This paper presents a linear approach where the inverse dynamics technique is used with a PI controller to provide good tracking performances and robustness to uncertainties and disturbances. A second approach is presented, where the H-infinity optimization technique is used in its loop-shaping implementation along with an inverse dynamics-based filter to form a controller that inherits the performance of the inverse dynamics technique and the robustness of the H-infinity technique.
Additionally, a comparative analysis was carried out assessing the effectiveness of the traditional feedback gains controller, the inverse dynamics controller and the H-infinity-based controller. The analysis was conducted via mathematical modeling of the pilot–aircraft system to study the integration of the human pilot in the control loop and via ground-based simulations to study the feasibility of the proposed control algorithms and the impact of a real human pilot.
This analysis revealed the issue of high actuator rate demands that arises when using inverse dynamics. This issue can lead to certain undesirable effects, such as pilot-induced oscillations (PIO). This paper presents a nonlinear prefilter used as a solution to this problem in order to insure a safe operation of the actuators and the safety of the entire system.
Besides the analysis introduced above, an additional investigative study was carried out with different inceptors and types of pilot output signals with the goal of defining the best way of their integration with the proposed techniques.
3. H-Infinity Design Procedure
The H∞ technique, in all its formulations, is a frequency domain design technique.
The approach presented in this paper is based on the shaping of the open loop such that the closed-loop system will allow good reference tracking at low frequencies and disturbance rejection at high frequencies.
3.1. H∞ Optimization
The objective is to compute a stable feedback controller H(s) that stabilizes the vehicle and maintains good performance even in the presence of uncertainties.
This goal can be expressed in the H∞ optimization framework such that the problem becomes that of finding a controller H(s) satisfying the condition given in Equation (6). This is a stability condition for feedback systems as given in [
26].
where, H is the H∞ controller, I is an identity matrix, G
s is the shaped plant as seen in
Section 3.2, and M is one of the elements resulting from the left factorization of G
s [
27]. It can be computed in a simplified manner using the solution to the Riccati equations as shown below, and ϵ
max is the maximum stability margin calculated as
where, λ
max finds the maximum eigenvalues, and X and Z are the solutions to the generalized algebraic Riccati equations shown in Equation (8).
where,
and
A, B, C and D are the state space matrices of the shaped system Gs, which is the mathematical model of the vehicle augmented with predefined filters as shown in the next subsection.
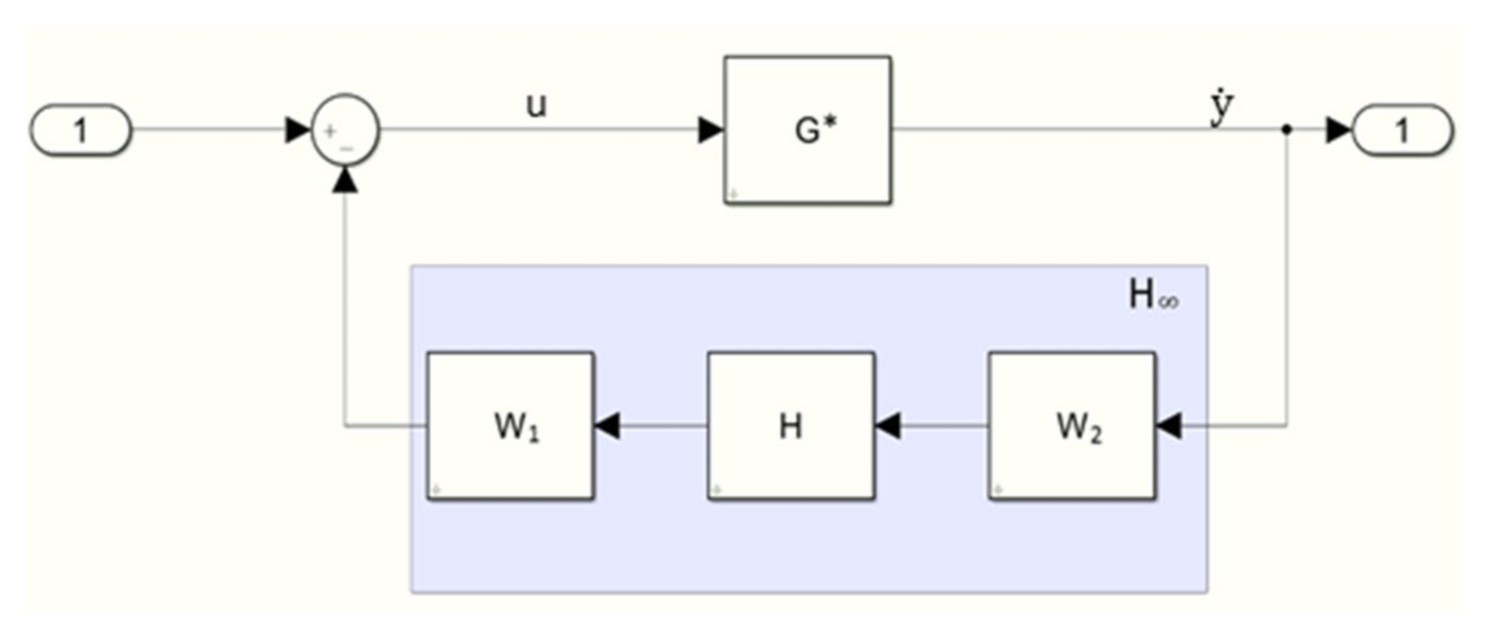
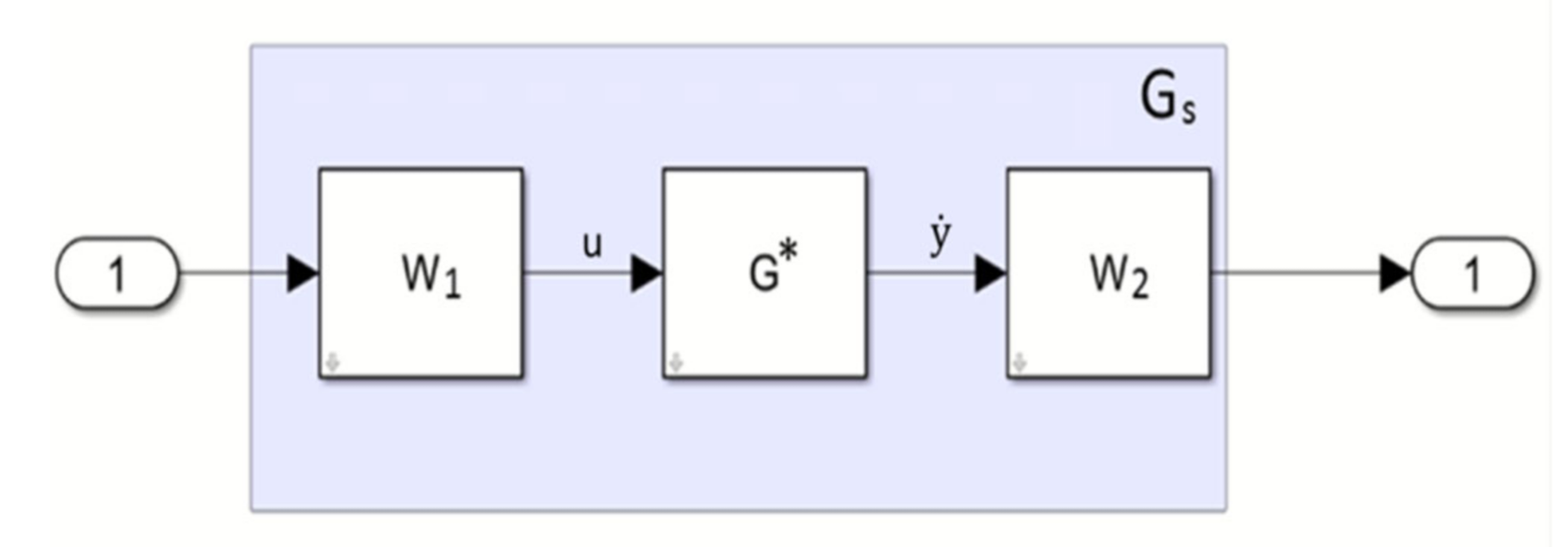
3.2. Shaped System Gs(s)
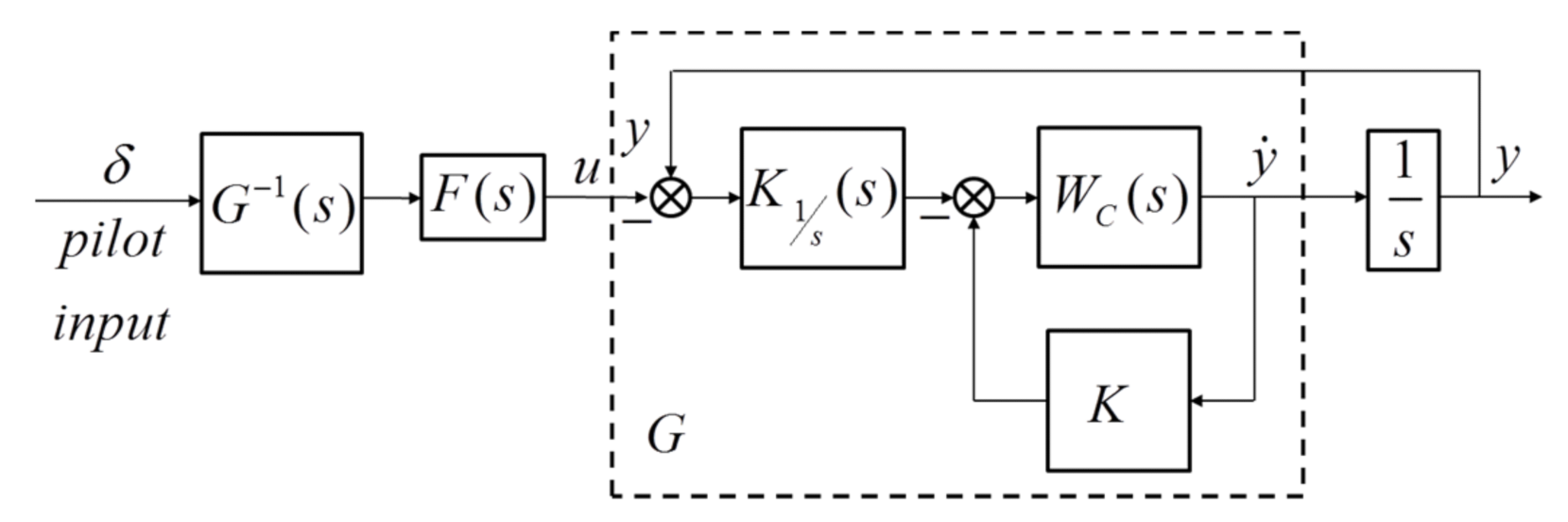
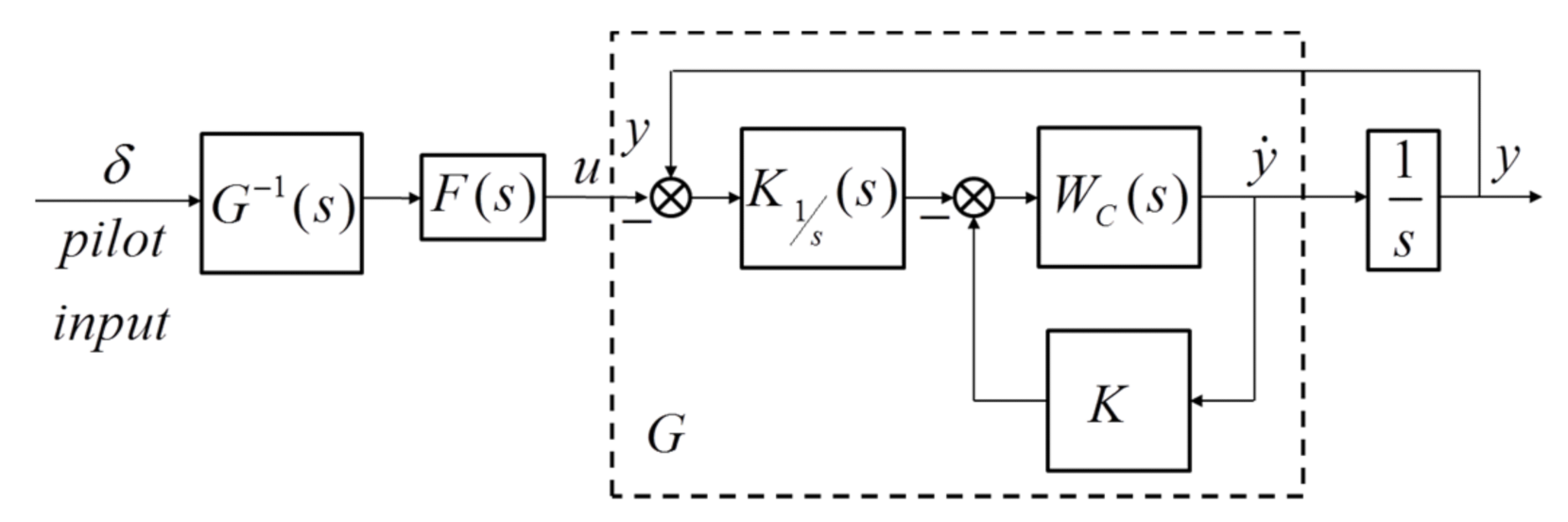
The system G
s (s) is formed by adding two shaping filters, W
1 (s) and W
2 (s), as shown in Equation (12) and in
Figure 3.
where
is the vehicle model with stabilizing gains, which is equivalent to G(s) without the
element.
The problem now is to find or compute the shaping filters such that W1(s) provides good tracking performance and W2(s) provides disturbance attenuation.
Disturbances are almost always in the higher frequency range. Therefore, W
2 is chosen to be a first-order low-pass filter of the form
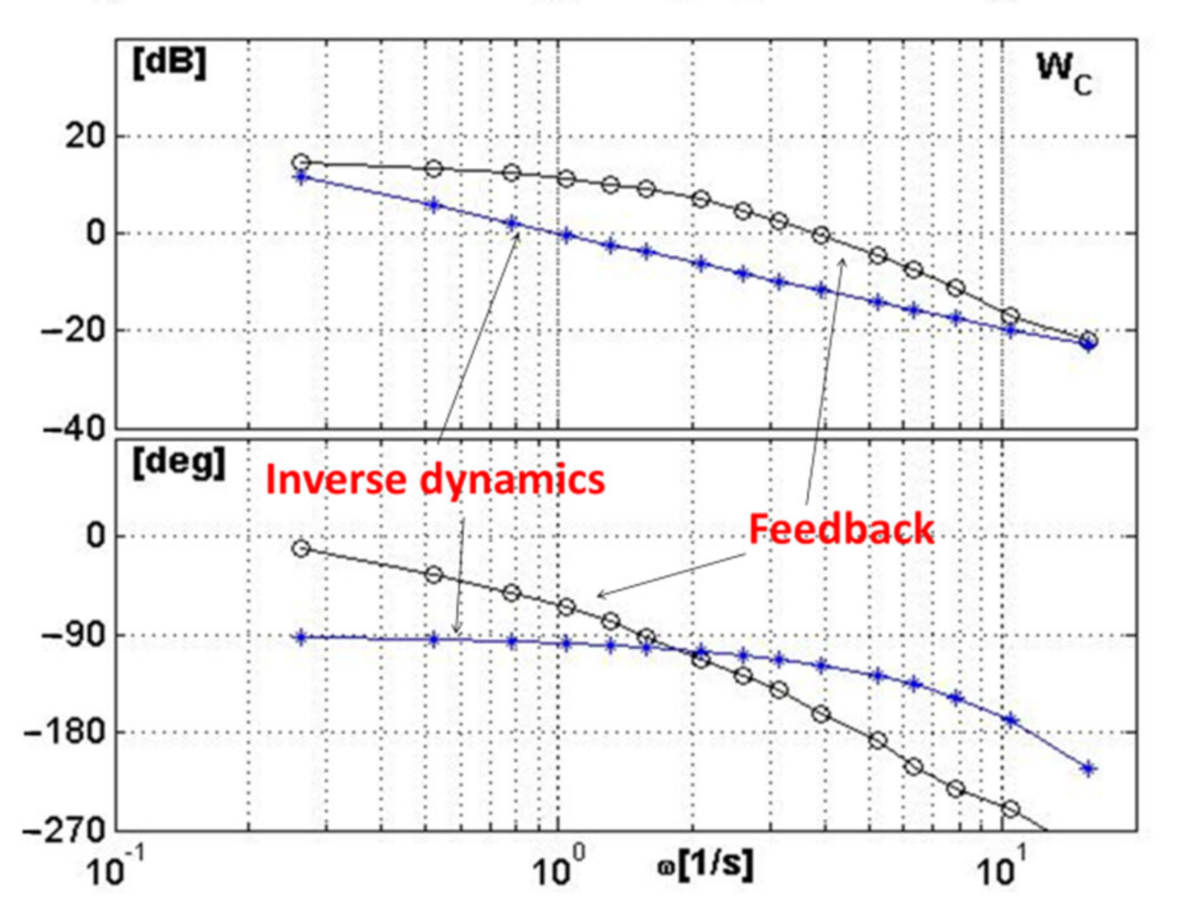
As discussed previously with inverse dynamics, we need the frequency response of to be equivalent to the gain response.
The frequency response of the shaped system should then be close to the integral , which will result in a closed loop whose response is equivalent to a gain in the low frequency range.
The choice of W
1 can then be motivated as follows:
where
is the inverse dynamics of
. It is also worth noting that Equation (14) is valid only in the frequency range lower than the cutoff frequency of W
2.
The peculiarity that can be seen here is that the inverse dynamics becomes included in the H-infinity controller. This integration was not explicit. It was, rather, an emergent feature of the frequency response requirement, and it allows the H-infinity controller to decouple the control axes of the vehicle and to provide good tracking performance while the H-infinity controller itself has the robustness features.
3.3. Dynamic Controller H(s)
After shaping the mathematical model of the vehicle, the matrices A, B, C and D of the shaped system and the solutions to the Riccati equations are used to compute the controller H(s) in state space form as shown in Equation (15).
where
The optimal overall stability margin is calculated as given in Equation (7). The value of this margin may differ from the classical SISO stability margins, as it is calculated using the eigenvalues of the coupled MIMO system. If the maximum eigenvalues are complex numbers, this results in a complex , which in turn will introduce a singularity as it is used to calculate the controller H(s). When this happens, it is necessary to modify the parameters of the shaped system used such that the maximum eigenvalues are not complex. This process is conducted iteratively, with some engineering intuition, as there is no formal way to tune the system.
It is also worth noting that Equation (16) uses and not min, because a controller can be computed for any value of >min. However, we have to keep in mind that is inversely proportional to the stability margin and, therefore, with an increase in its value, the stability margin consequently decreases, and from the basics of control theory, it follows that tracking performance increases. Therefore, there is a fundamental tradeoff between the stability margin and performance, and this can be tuned by changing the value of used.
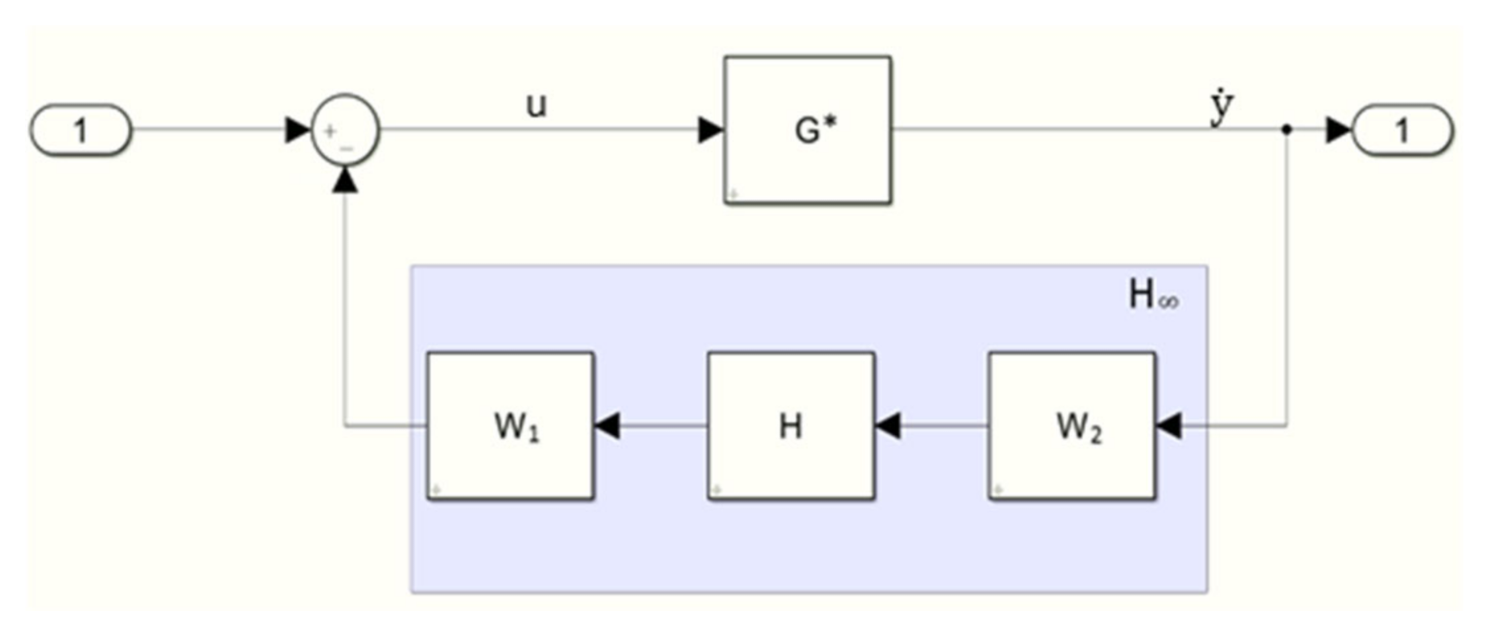
3.4. H∞ Controller Implementation
The previous section computed the controller H(s) that will provide robust stability to the system. The final feedback controller is obtained as the product of H(s) and the shaping filters as shown in
Figure 4.
3.5. H∞ Design Summary
The design of the H∞ controller can be summarized as follows:
- 1.
Find the stabilizing gains for the nominal system via classical methods or pole placement and obtain the system G∗;
- 2.
Compute the inverse dynamics ;
- 3.
Define the shaping filter W1 using inverse dynamics for reference tracking and W2 using a low-pass filter for high-frequency noise or disturbance rejection and build the shaped system Gs;
- 4.
Calculate the controller H:
Solve the algebraic Riccati equations of the shaped system Gs;
Calculate the optimal ϵmax and min using the solutions to the Riccati equations;
Compute the controller H;
Construct the final dynamic feedback controller such that H∞(s) = W1(s) H(s) W2(s).
4. Research Plan
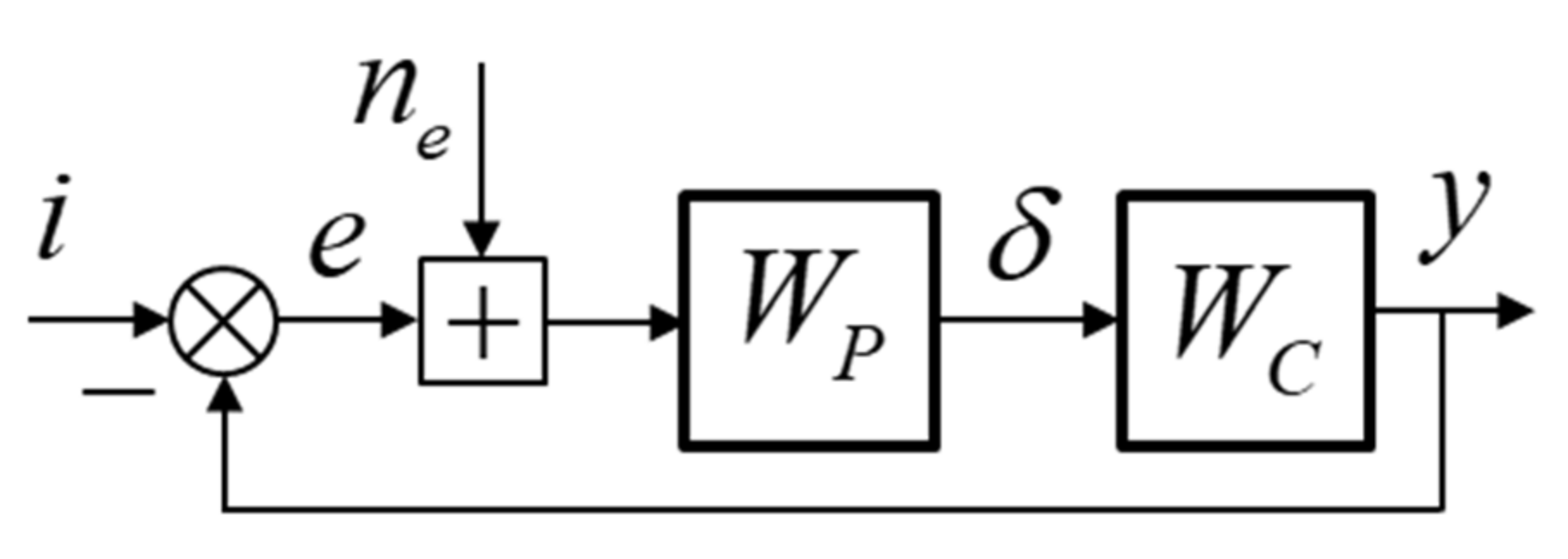
The controllers designed above were evaluated for a pitch angle tracking task with the dynamical model of a helicopter. Here, pilot actions can be represented as a single-loop compensatory system as shown in
Figure 5. Another point to note is that the pilot signals
(from the longitudinal cyclic) can be either proportional to the inceptor displacement (deflection) or proportional to the force applied on the inceptor.
The effectiveness of the proposed algorithms was studied using ground-based simulation and mathematical modeling of the pilot–aircraft system.
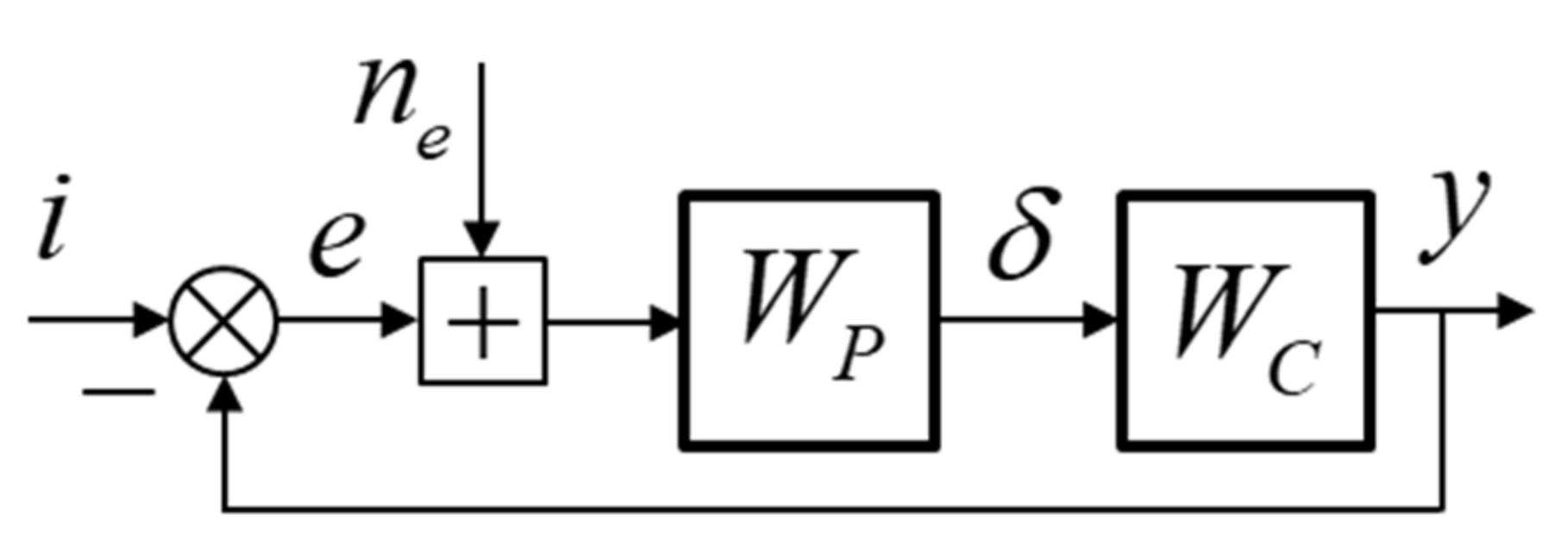
4.1. Mathematical Modeling of the Pilot–Aircraft System
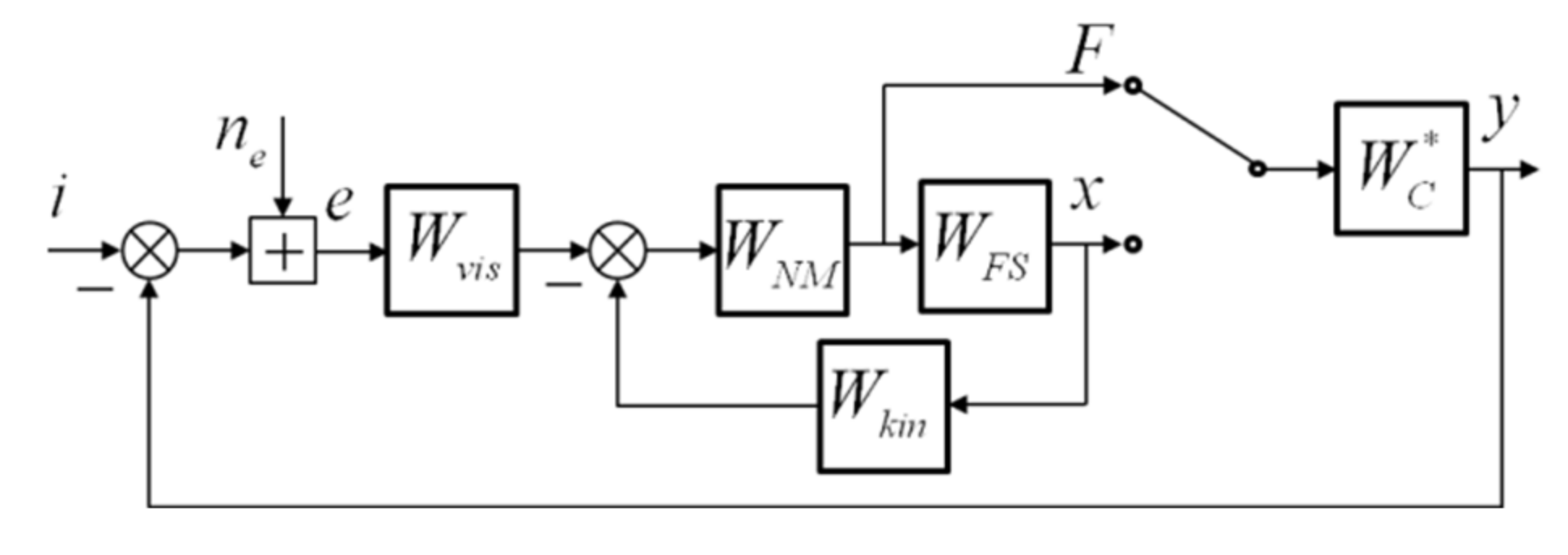
Mathematical modeling was carried out using a modified structural model of the pilot developed in [
28] and shown in
Figure 6.
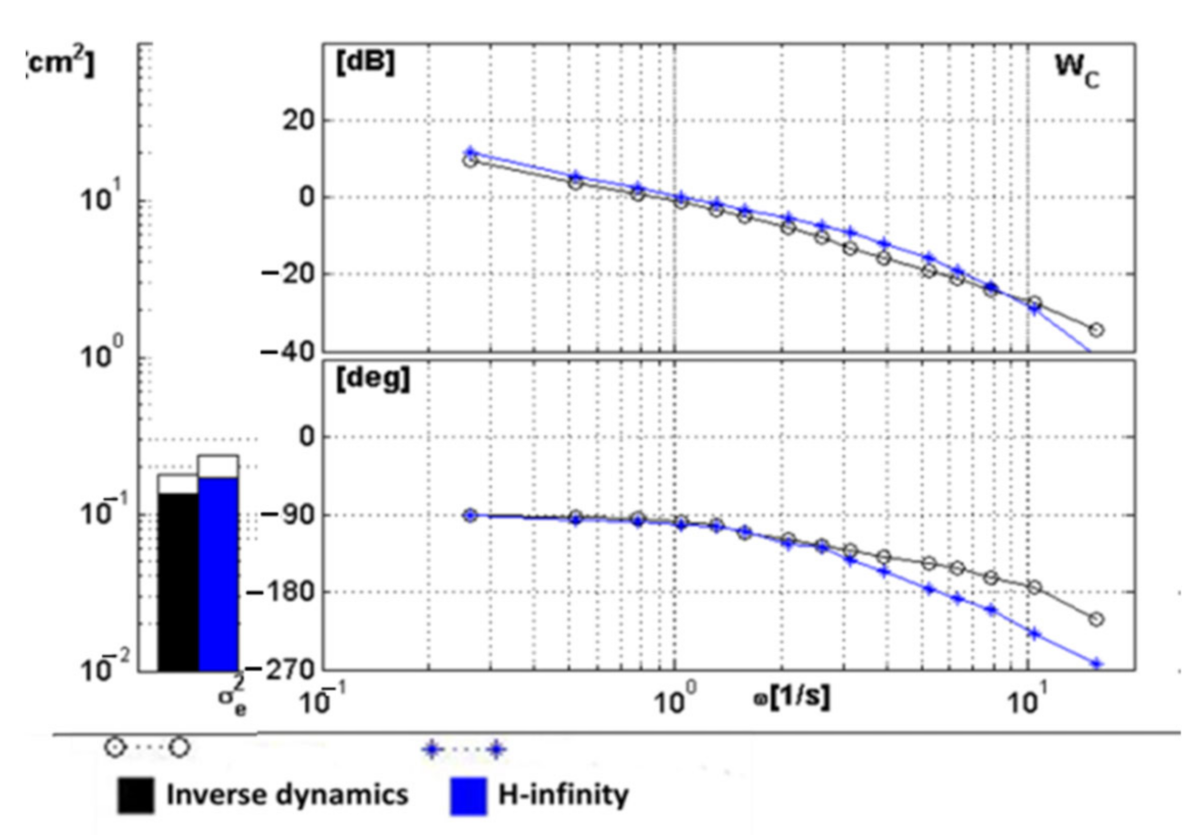
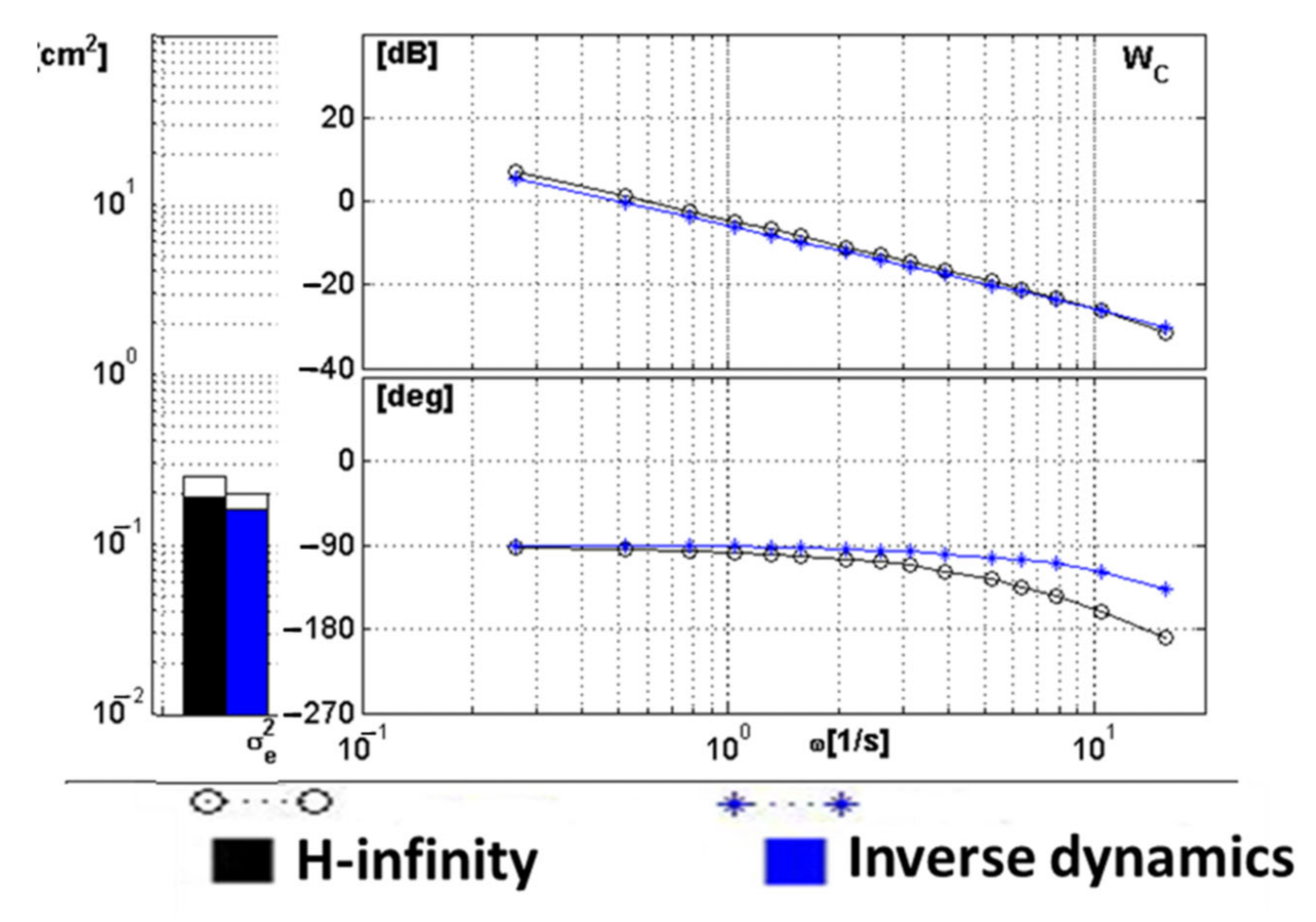
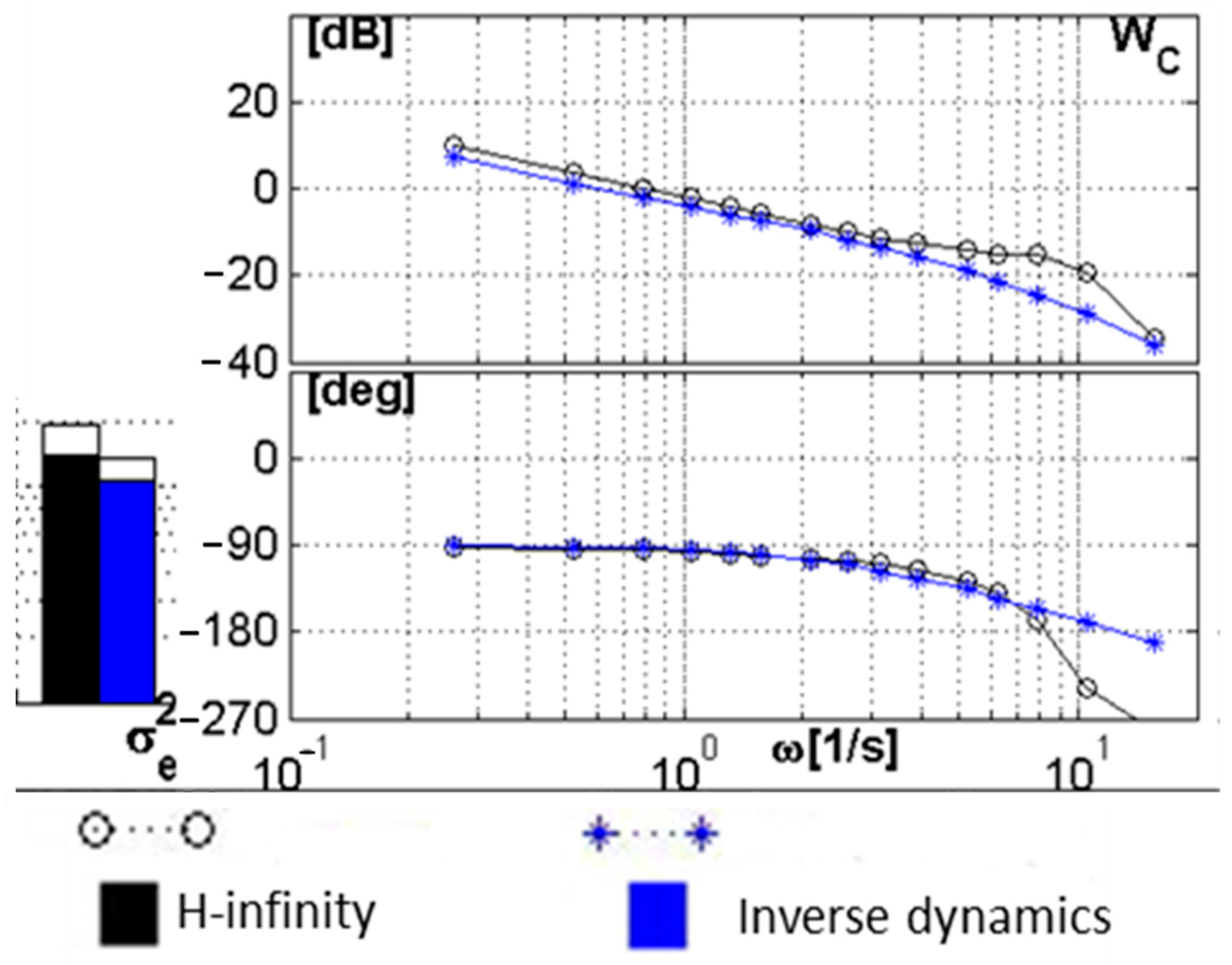
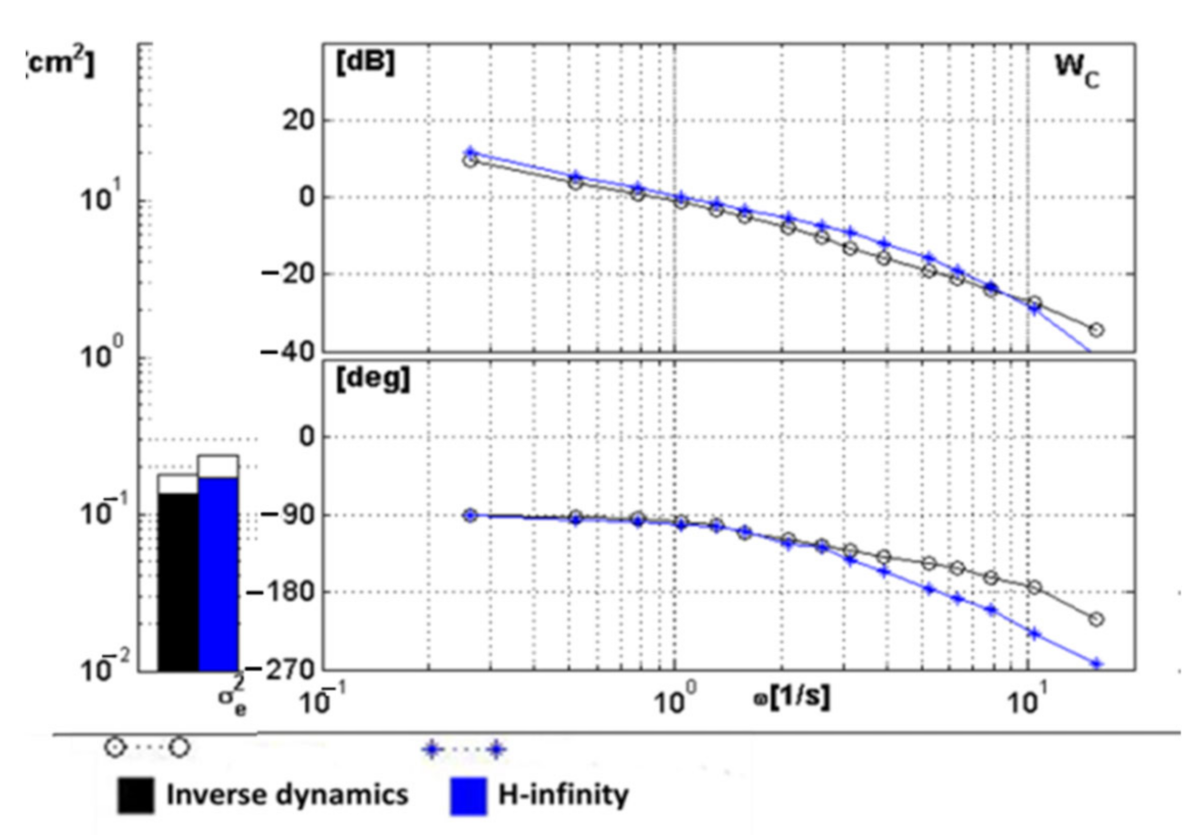
where i is the input signal, e is the error signal, x is the stick deflection (displacement), F is the force applied on the stick by the pilot, y is the output of the pilot vehicle system, and Wc is the controlled element dynamics;
is the model of visual information perception and compensation; is the model of proprioceptive information perception and compensation;
is the neuromuscular system model;
is the inceptor model; and
n
e is the pilot noise (remnant) characterized by the spectral density
, where
and
are the variance of error and its derivative, respectively;
; and W
c∗ is the controlled element, which is the mathematical model of the vehicle and the control system. The parameter vector of the structural model a = (T
L, K
L, T
N, K
N) is calculated by running the minimization criterion I = min (
), where the variance of error
is determined as given in [
29].
The structural model shown in
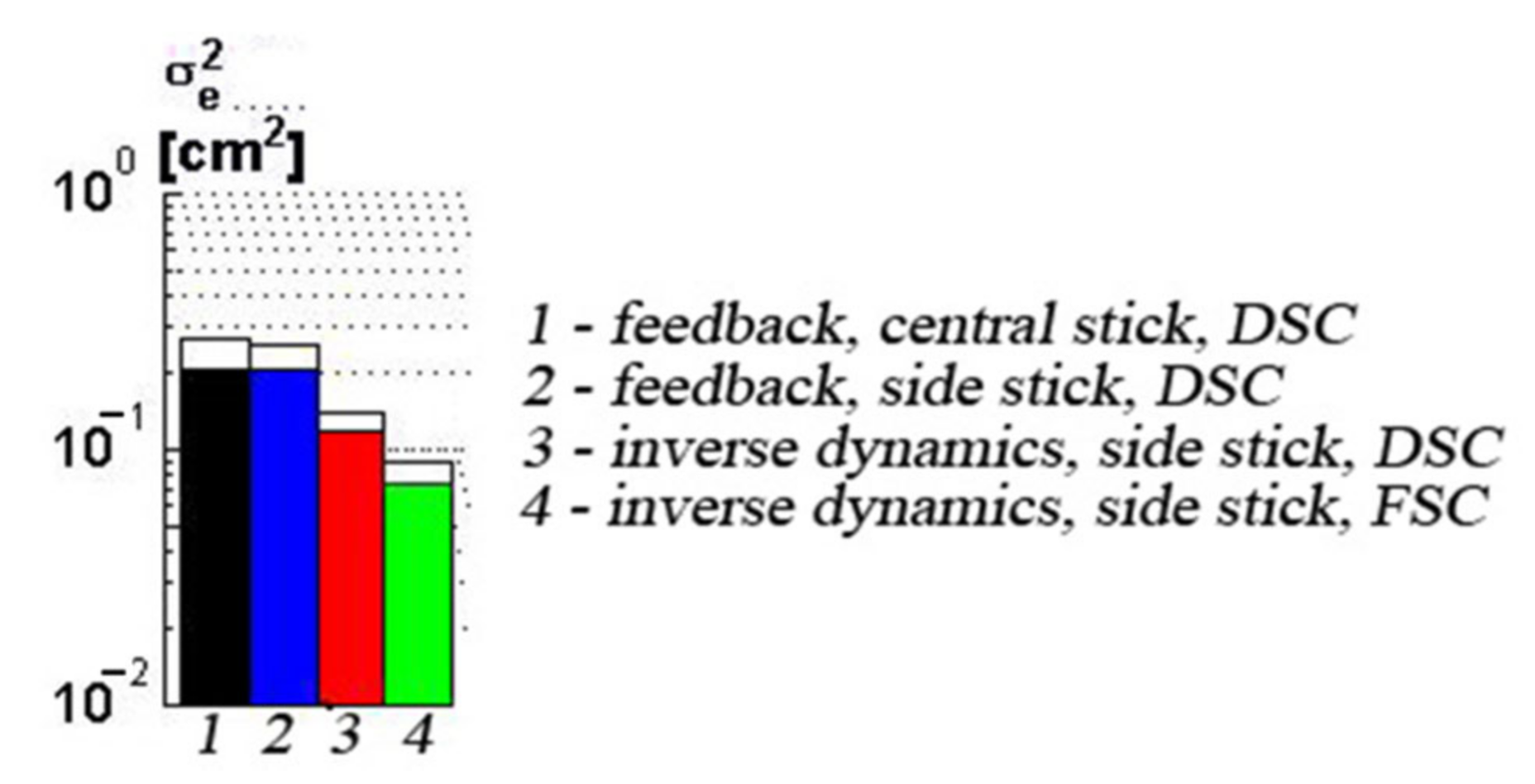
Figure 6 allows the study of a pilot–aircraft system for two types of pilot output signals: the displacement signal, performing the so-called “displacement sensing control (DSC)”, and the signal proportional to the force applied by the pilot, performing the so-called “force sensing control (FSC)” [
30].
4.2. Ground-Based Simulations
The effectiveness of inverse dynamics and the H∞ controller were also studied using a ground-based simulator equipped with a collimated visual system and the Moog control loading system (see
Figure 7), as well as a workstation for the flying qualities studies.
An image of the compensatory display was shown on the screen of the central collimator. The vertical motion of the indicator on this display allowed us to perform a compensatory pitch tracking task. The Moog system equipped with force and displacement sensors made it possible to evaluate the effectiveness of the DSC and FSC types of pilot output.
The experiments involved two operators and one licensed pilot. They all had sufficient experience in ground-based simulations. The compensatory pitch tracking task was carried out with a polyharmonic input signal , which appeared as a random signal to the operators. Its amplitude Ak and orthogonal frequencies , where T is the duration of the trials, were selected from the requirements of correspondence between the power distributions of the polyharmonic signal and a random signal characterized by the spectral density .
The Fourier coefficient technique [
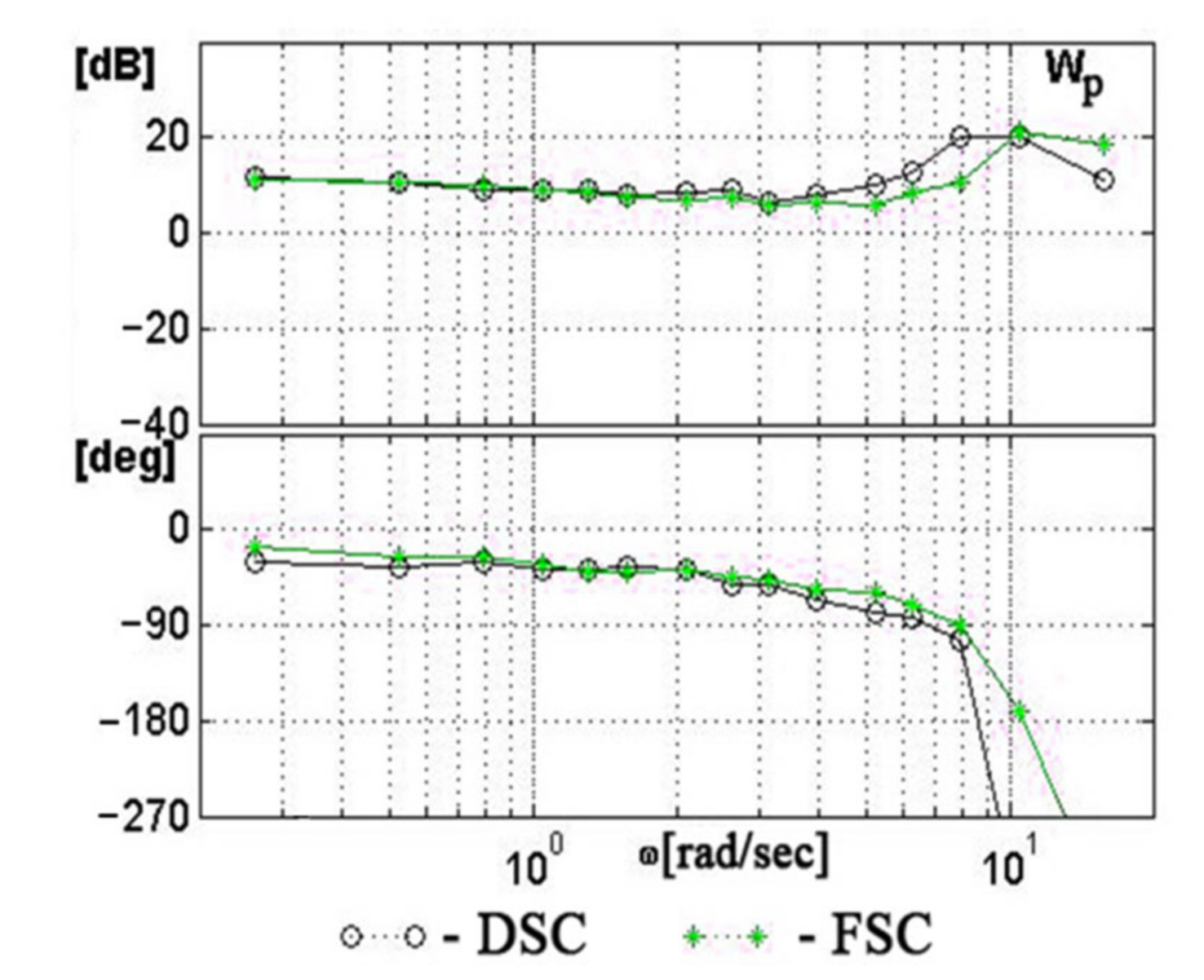
31] was used for the calculation of the main pilot–vehicle system characteristics:
Pilot Wp(jω), open-loop WOL(jω) and closed-loop describe functions;
Pilot remnant spectral density ;
Variance of error and its components , which is the variance of error correlated with the input signal, and , which is the variance of error correlated with the remnant.
The experiments were carried out with two types of inceptors: a center stick and a sidestick.
At least three trials were executed for each variable (controlled element dynamics, type of inceptor and pilot output), and the obtained results were averaged. The duration of each trial was equal to 144 s.
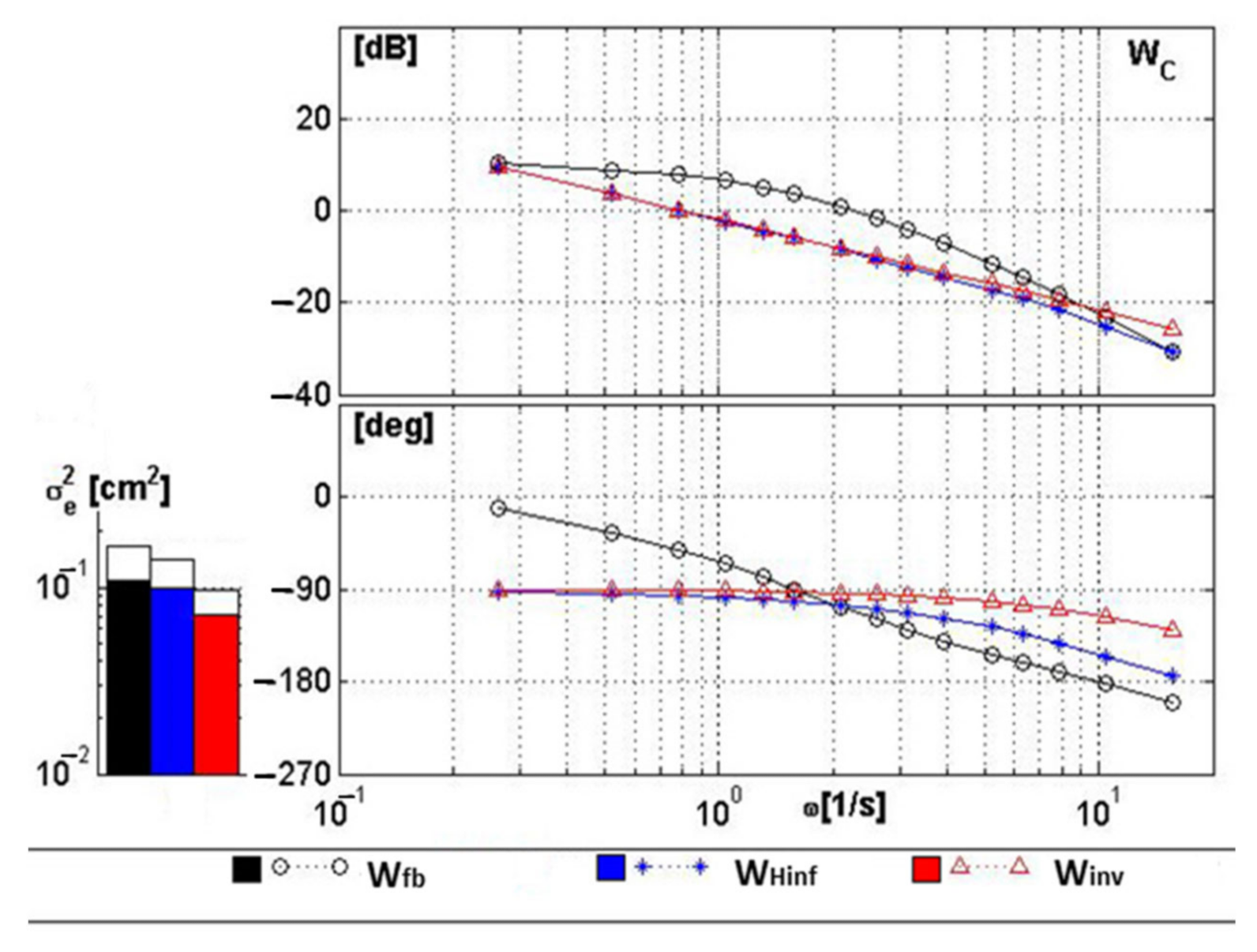
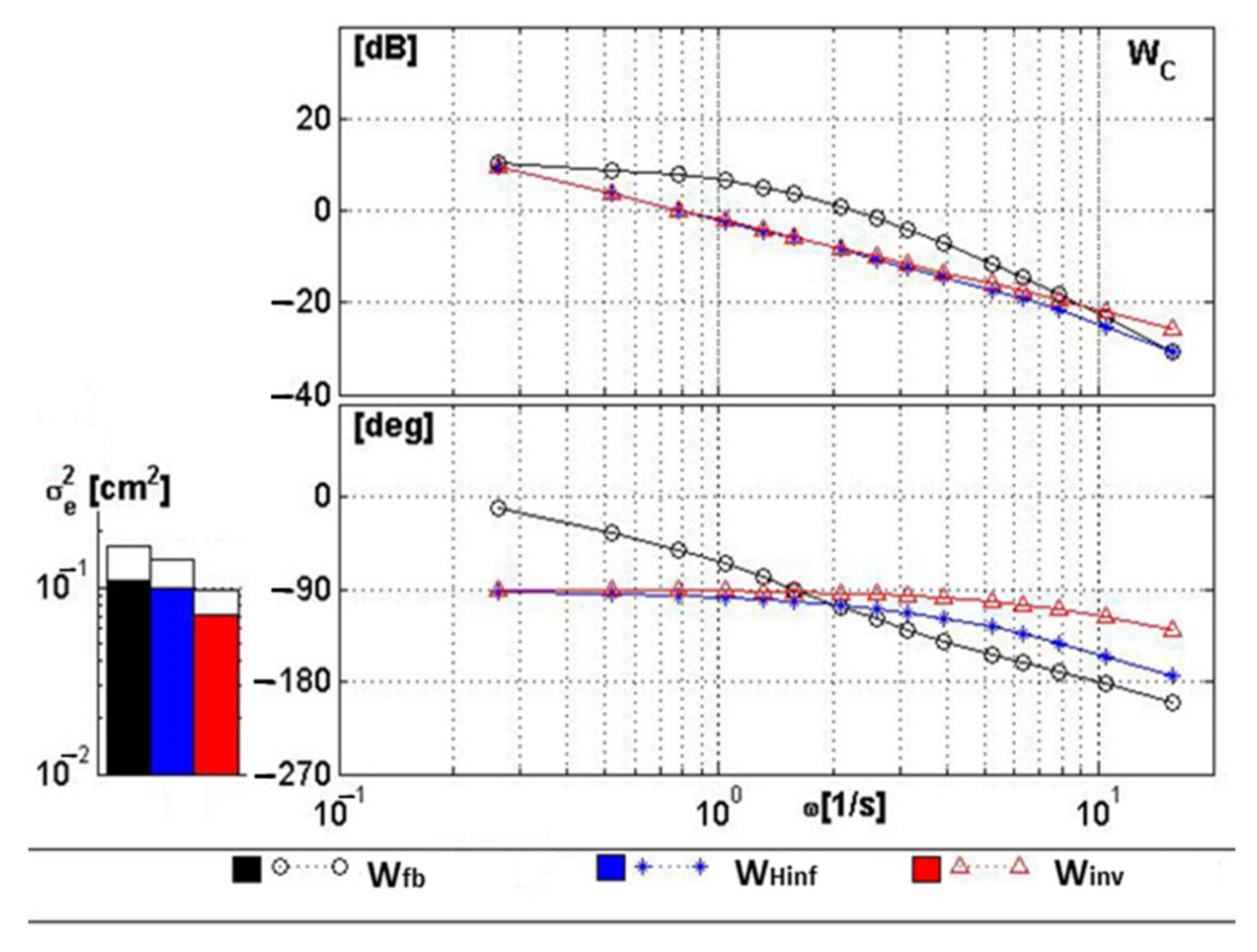
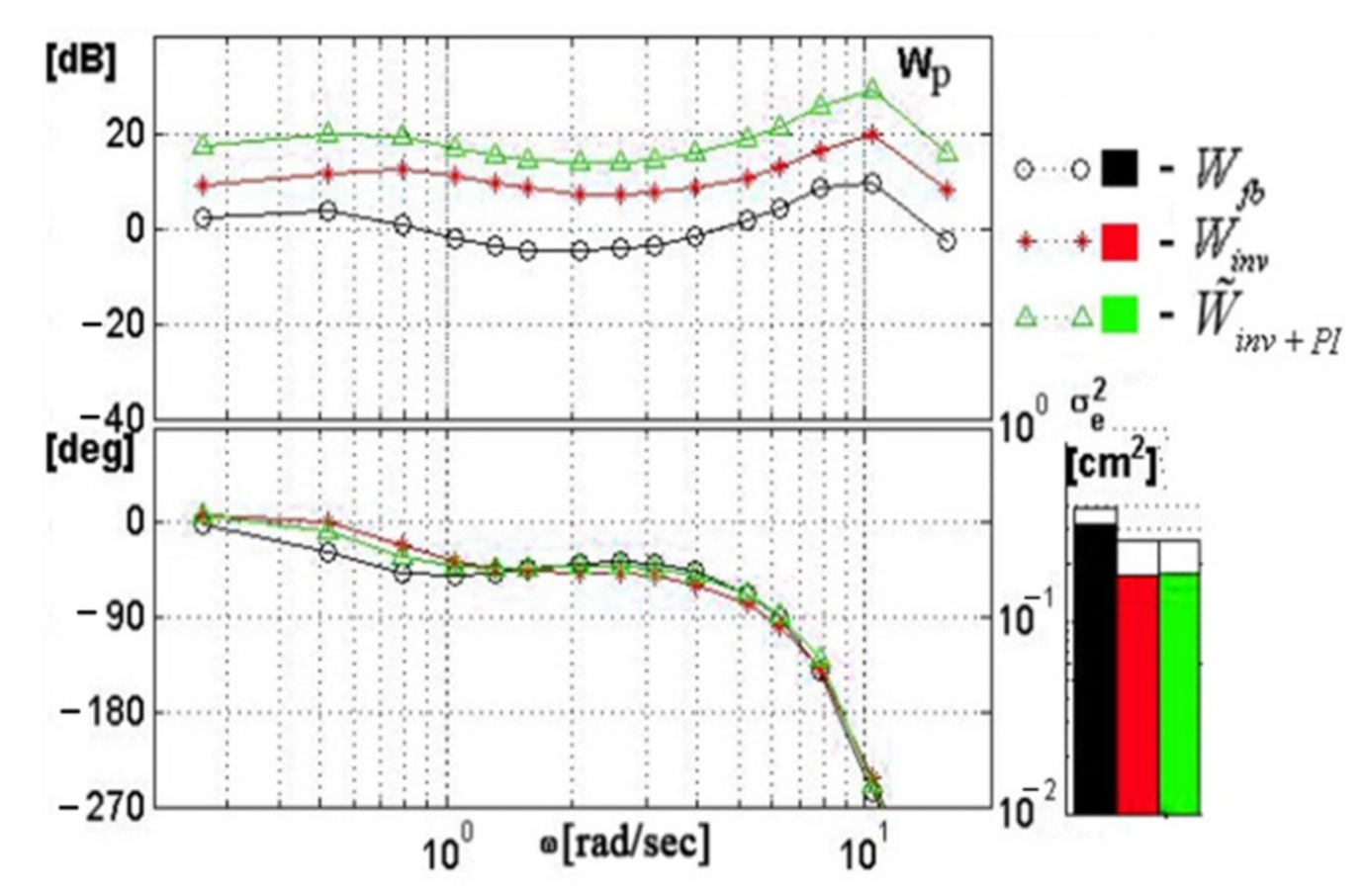
The following controlled element dynamics were used in the experiments:
: dynamics of a controlled element whose control system consists of simple feedback gains only.
: dynamics of a controlled element whose control system includes feedback gains and inverse dynamics with a PI controller and filters F(s).
: dynamics of a controlled element whose control system is based on the H-infinity technique.
6. Discussion
This paper went through the development of control algorithms based on the inverse dynamics technique and the H-infinity technique for flight control. During the development of the latter, a filter based on the inverse dynamics was introduced in order to provide better performances to the H-infinity-based controller. One thing that stood out was that even though theoretically this technique seems easy and straight forward, its implementation was rather difficult, as singularities appeared in the application of the algorithms for certain parameters. Moreover, this required additional optimization loops to find the right parameters.
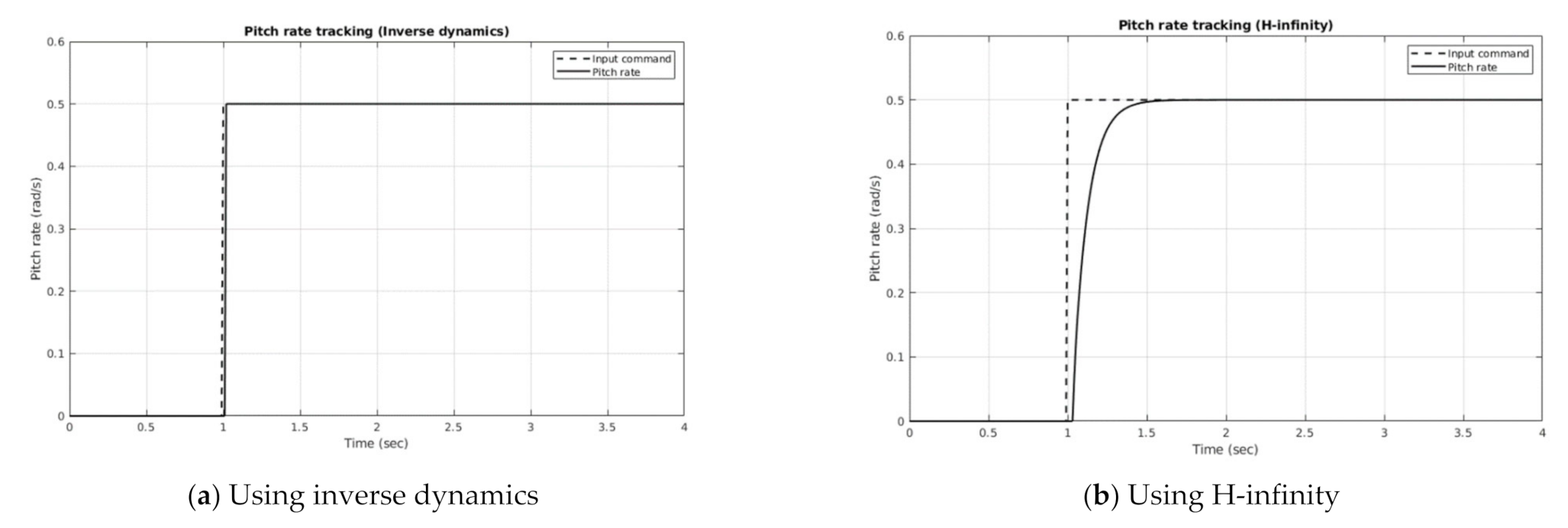
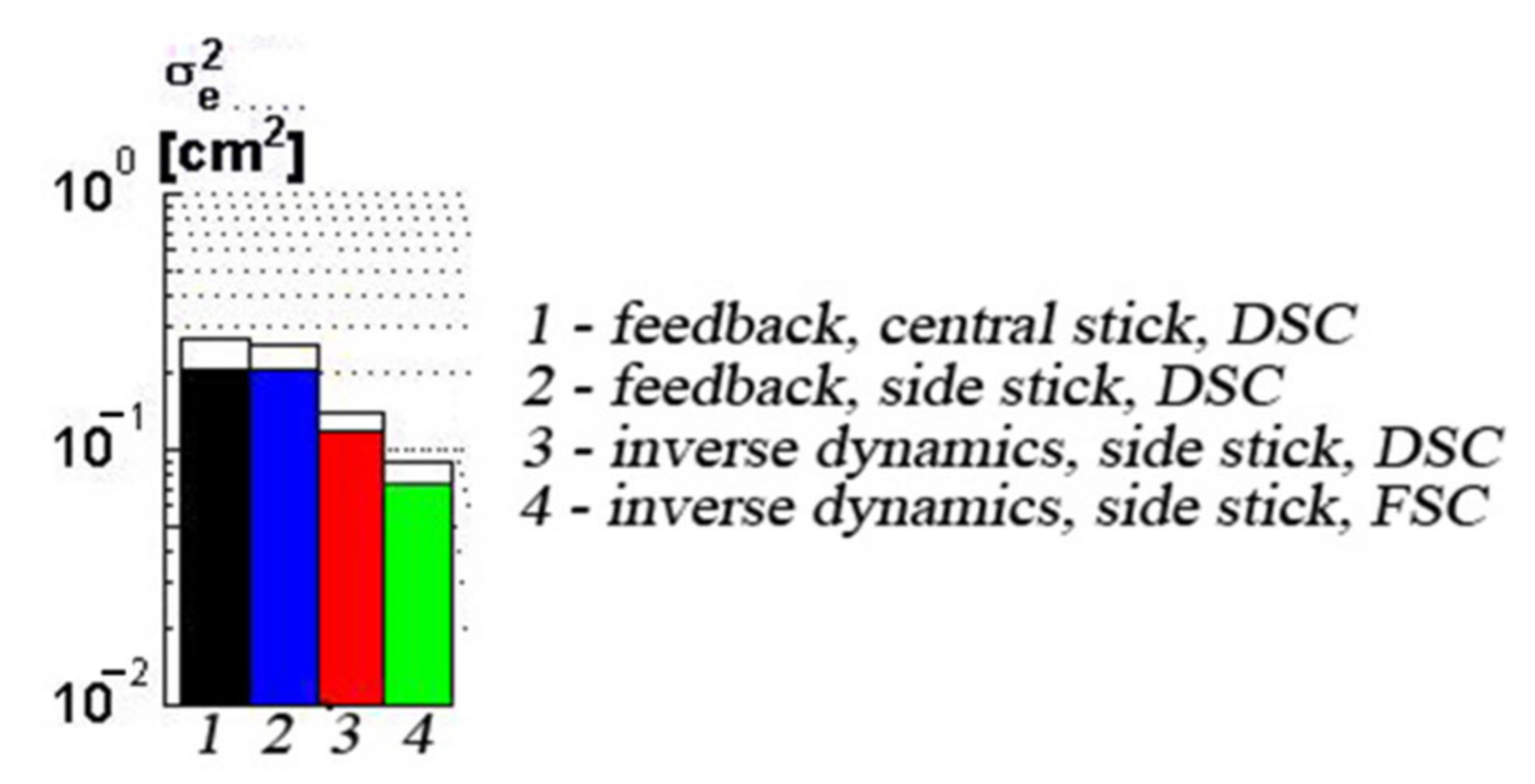
A comparative study was carried out between the traditional feedback gains, the inverse dynamics controller and the H-infinity-based controller. This study revealed that both the H-infinity controller and the inverse dynamics controller provided much better performances compared to the traditional feedback gains, with the variance of error decreasing by a factor of up to 2.3 times. At the same time, the inverse dynamics controller proved to be better than the H-infinity controller, even with degraded actuators. This is mostly because the H-infinity-based controller has a sensitive fundamental tradeoff between performances and robustness.
The lack of robustness of the inverse dynamics controller was solved by introducing a PI controller, which came as an addition to the good performances of the inverse dynamics without degrading them. This gave an upper hand to this controller.
To evaluate the robustness characteristics, uncertainties were introduced in the mathematical model of the vehicle used by changing the coefficients of both the state matrix and input matrix. Moreover, ground-based simulations showed that the inverse dynamics equipped with a PI controller were much better at handling uncertainties than the H-infinity controller, with the variance of error decreasing by a factor of up to 2.
Different control sticks and different control signals were also investigated to find their best integration with the control algorithms. This investigation revealed that using a sidestick, along with force sensing control (FSC), which sends control signals proportional to the force applied on the stick by the pilot, provides much better performance than any other combination, with the variance of error decreasing by up to 3.9 times in comparison with the traditional feedback gains.
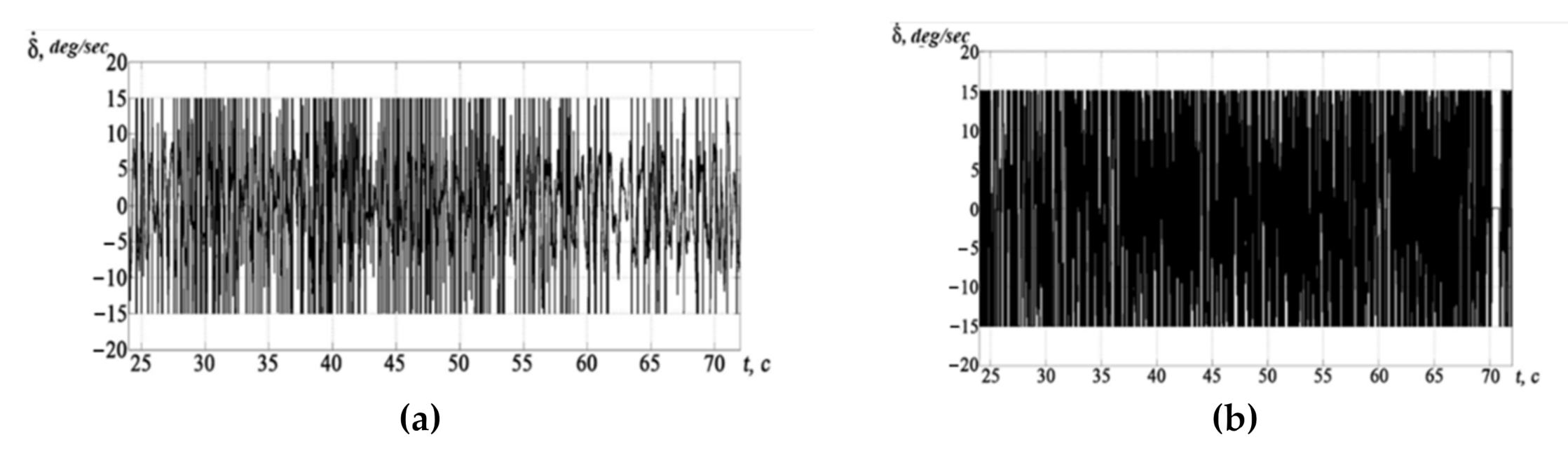
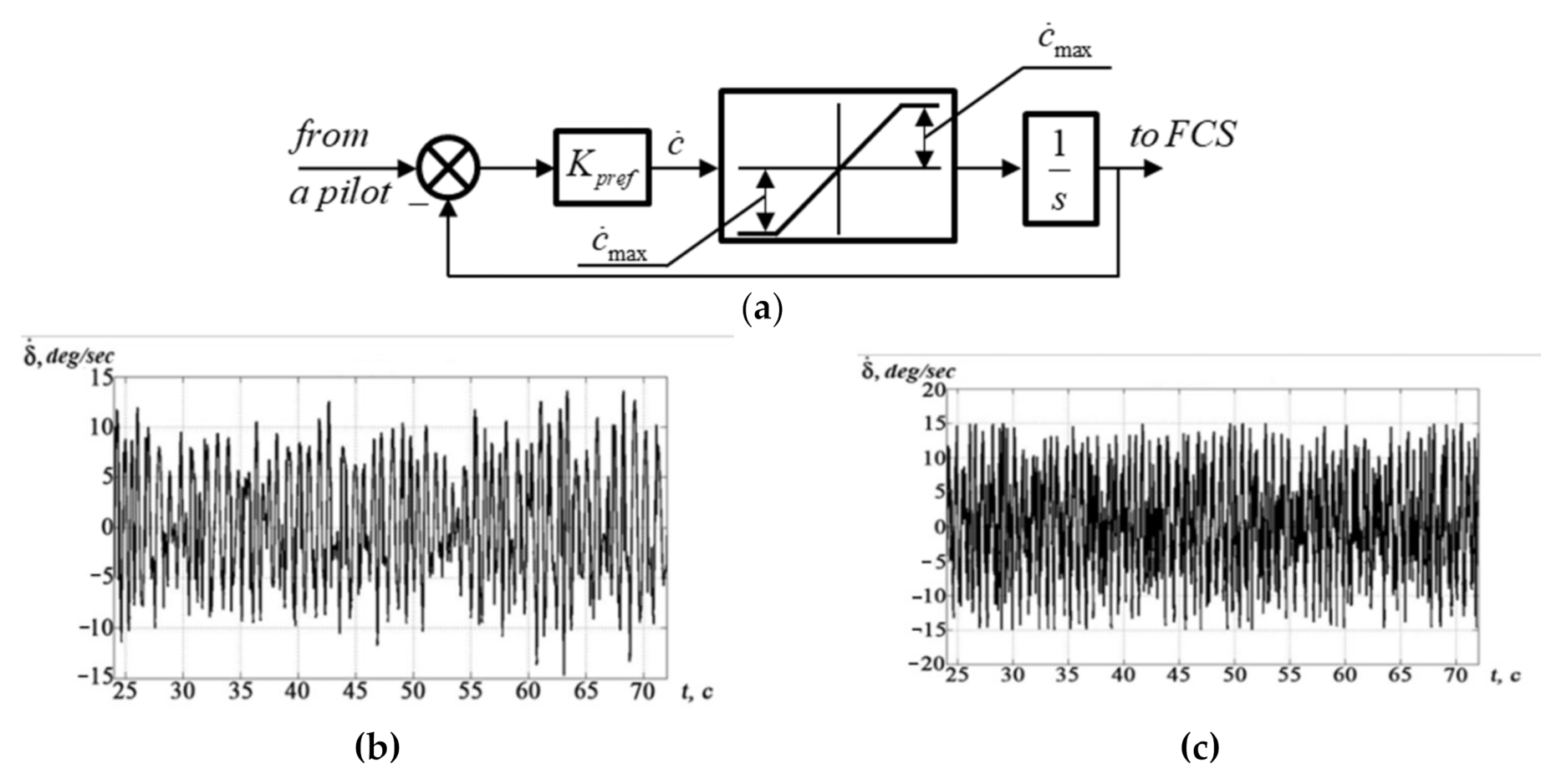
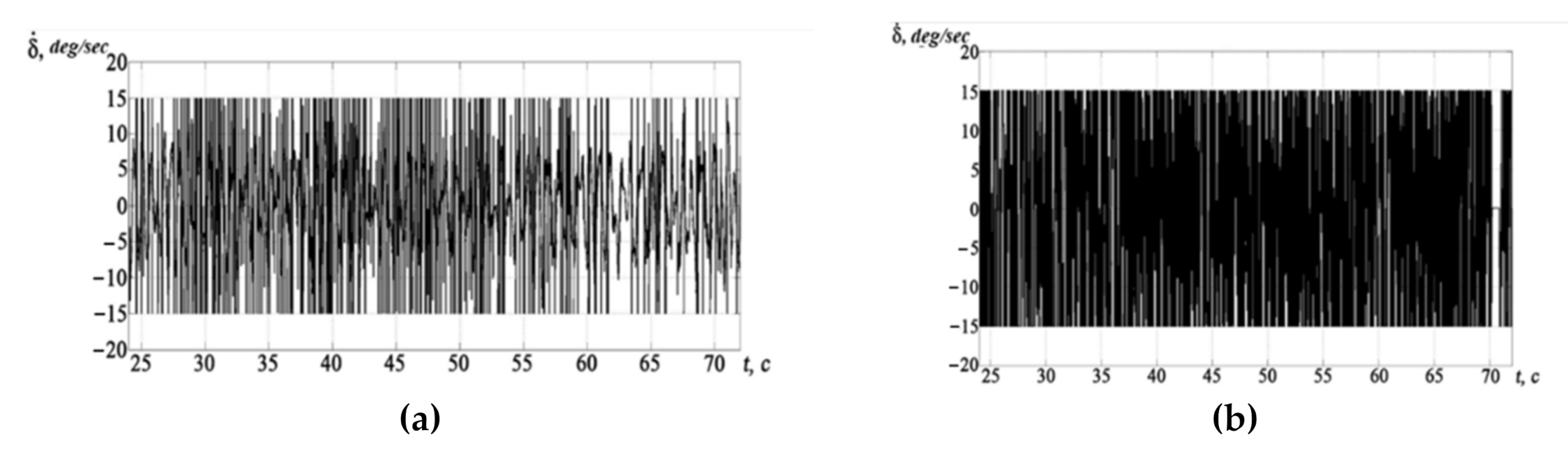
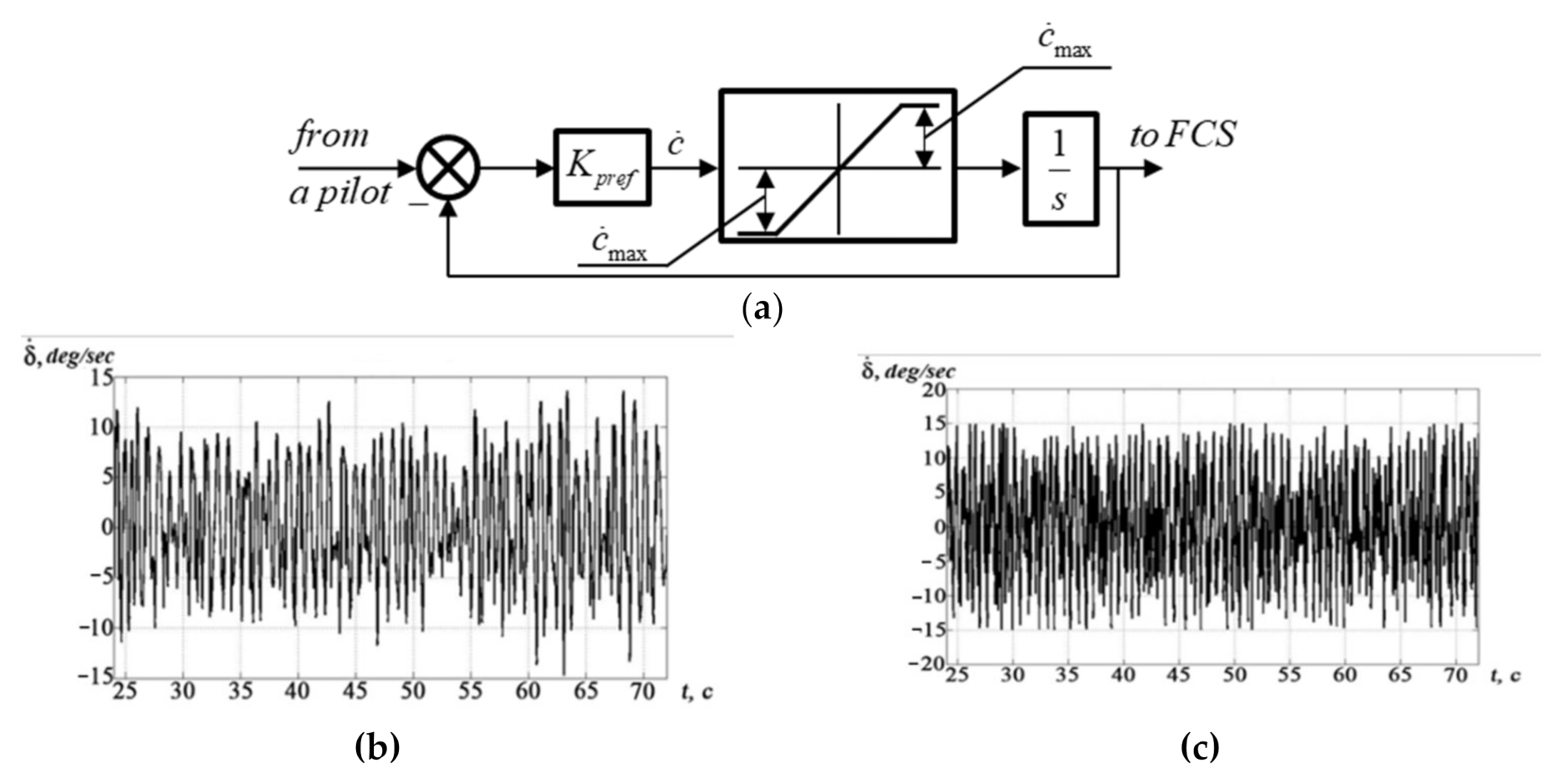
One problem that arises when using inverse dynamics is the high actuator rates that are increased even more when the FSC type of output is used. This problem was solved by introducing a nonlinear prefilter between the pilot signals and the flight control system. This allowed a considerable decrease in the actuator rates, while maintaining good performances.
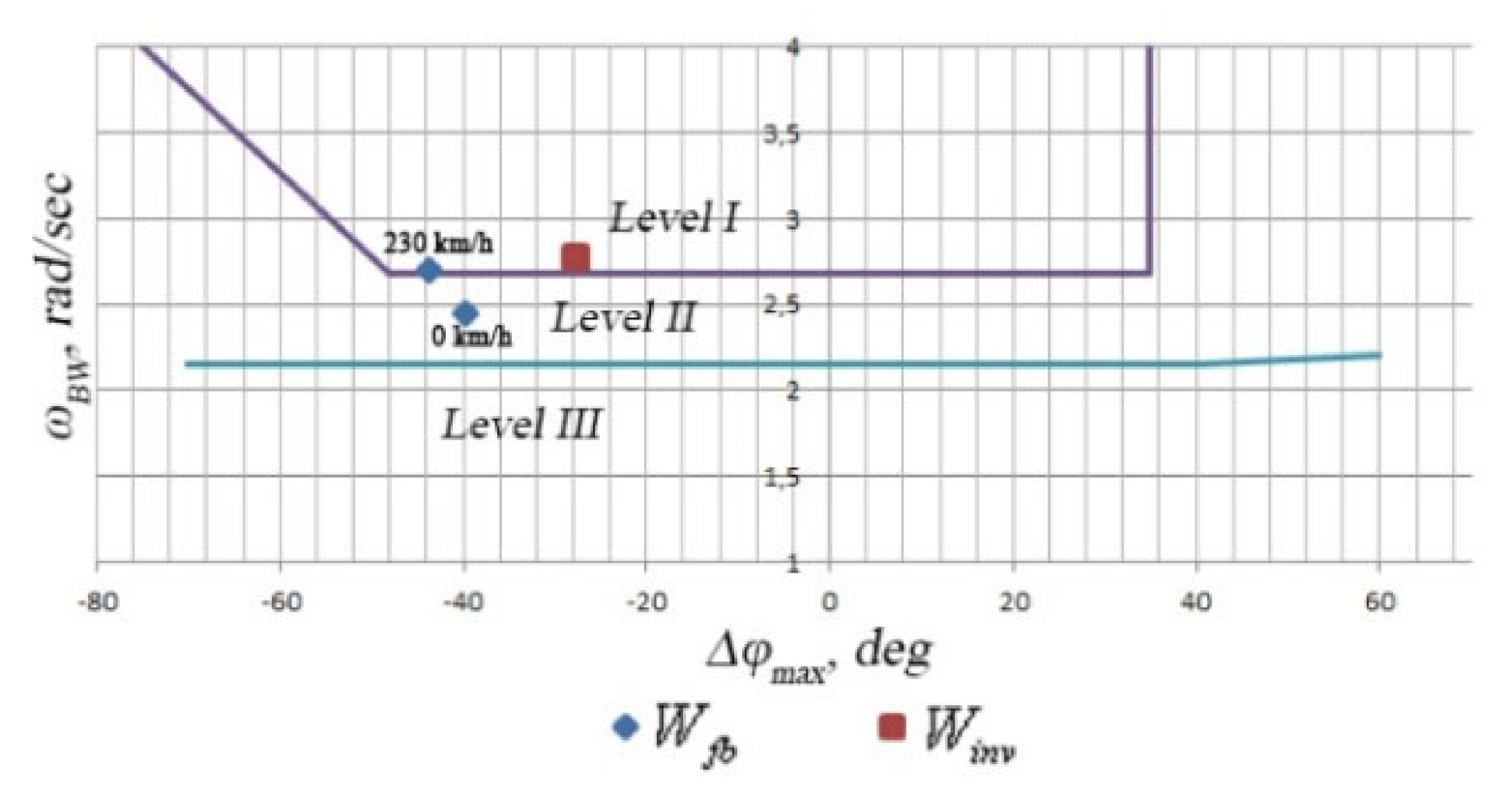
Another aspect considered in this paper is flying qualities requirements. To estimate the flying qualities provided by the controllers developed, the new Mai criterion was used. This criterion revealed that the inverse dynamics controller provides flying qualities of level 1 in all the flight conditions.
7. Conclusions
Control techniques were developed by using the inverse dynamics and H-infinity principles and were compared to a fight control system based on the use of feedback gains only. The proposed algorithms are general control design techniques that can be applied to both fixed-wing aircrafts and rotorcrafts. In this work, the effectiveness of the techniques is studied using a helicopter.
The implementation of inverse dynamics and the need for robustness required the installation of filters F(s), to make the inverse dynamics proper, and PI controllers in the flight control system.
The experimental investigations demonstrated a higher efficiency when using inverse dynamics in comparison with H-infinity, which is also more efficient than feedback gains only. Comparative studies also showed that an H-infinity controller with an inverse dynamics filter provides performance close to that of an inverse dynamics controller when the actuator is degraded. However, the difficulty and complexity of implementing and tuning the H-infinity controller makes it much less appealing compared to the inverse dynamics-based one. Therefore, for this study, the inverse dynamics-based controller was chosen for further experimentation. These investigations showed that its integration with a sidestick and the force sensing control type of pilot output makes it possible to increase performances in comparison to the traditional flight control system with feedbacks, a center stick and the DSC type of pilot output. Additionally, the technique developed in this paper allowed us to decrease the pilot phase delay in the high-frequency range. The high actuator rate demand of the sidestick with FSC, which can be seen as a shortcoming, can be eliminated by using a nonlinear prefilter between the pilot commands and the control system.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}