Go-Around Detection Using Crowd-Sourced ADS-B Position Data


Abstract
1. Introduction
2. Data and Methods
2.1. Opensky Aircraft Position Data
2.2. Pre-Processing of Data
2.2.1. Removal of Invalid and Unneeded Position Reports
2.2.2. Correction of Barometric Altitude
2.2.3. Removal of Flights Departing VABB
- The first five position reports for a flight are listed as on the ground, and the average altitude for the entire flight trajectory is less than 3000 ft.
- All reported in-flight altitudes are less than 600 ft, a threshold determined through manual analysis.
- All reported in-flight altitudes are less than 3000 ft and the first three reported altitudes are lower than the subsequent three altitude reports.
- The average rate of climb for the first six in-flight altitude reports is greater than 1500 ft per minute.
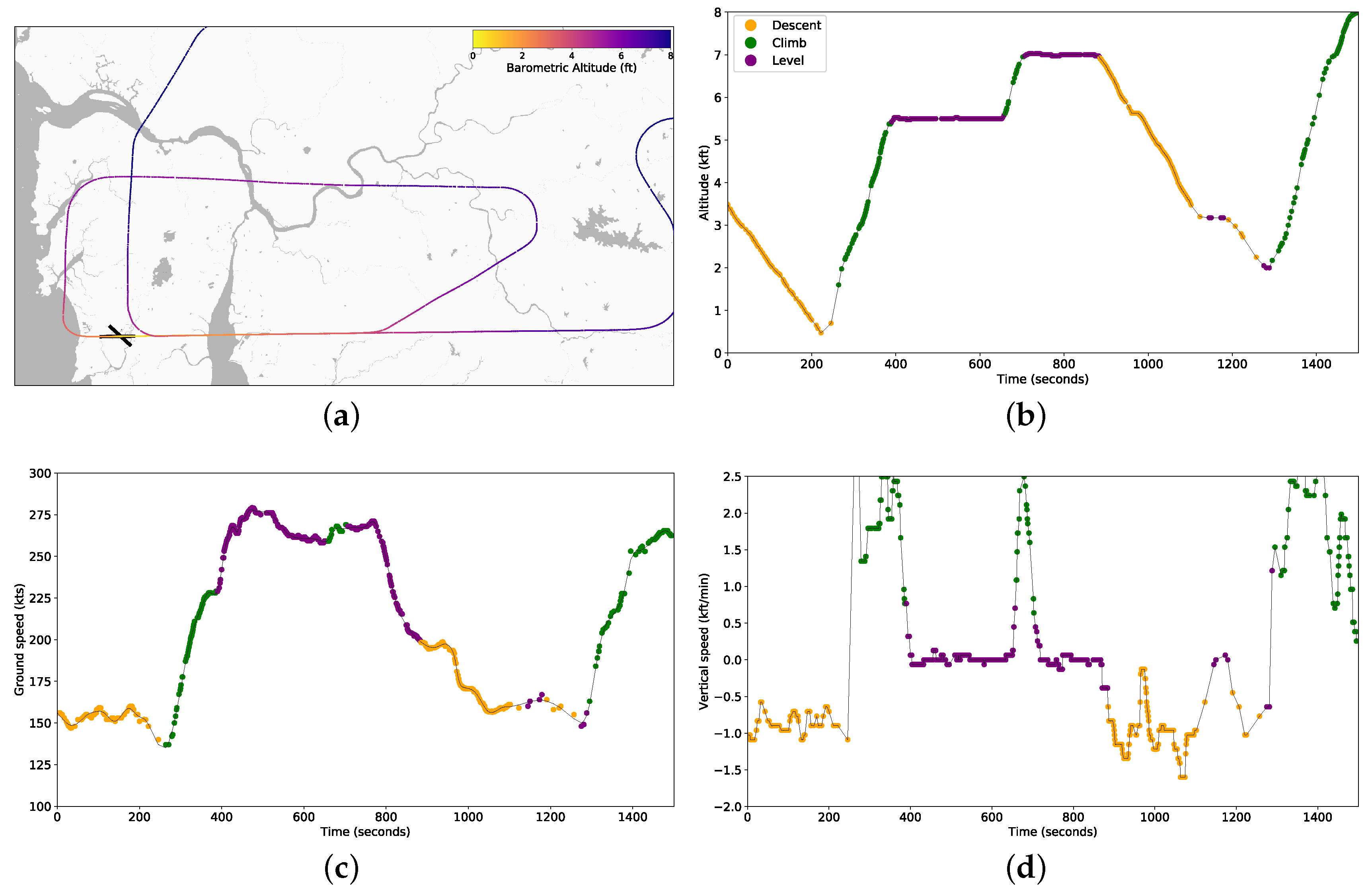
2.2.4. Categorisation of Flight Phases
2.3. Go-Around Detection
- Method 1: An existing method for detection [22]. First, check that a flight trajectory begins more than 3 nautical miles from the airport and ends less than 3 nautical miles from the airport. Next, compute the cumulative turn angle by summing the absolute value of all changes in heading within 6 nautical miles of the airport. If this angle is greater than 330° then class the flight as a go-around. Reasoning: Aircraft that go around will typically deviate from the runway heading, flying in some form of circular or oval pattern in order to rejoin the approach path.
- Method 2: Check for three position reports, which show an increasing altitude trend, that immediately follow the minimum reported altitude. Reasoning: As above, but testing a different method of detecting the post go-around climb.
- Method 3: Combine method 2 with a check of positive rate of climb. On occasion, false altitude reports may show an aircraft at high altitude even when on the ground, while sometimes the rate of climb is falsely set to a high number if the aircraft has weight-on-wheels. This method attempts to minimise incorrect detections caused by either of these false datapoints. In addition to the method 2 check, this method looks for a positive rate of climb within one minute after the minimum altitude, reported in three individual position reports that are separated by more than ten seconds. Reasoning: During a go-around, an aircraft will typically climb away from the runway before repositioning for another landing attempt.
- Method 4: Check for sustained ground speeds above 100 kts following the minimum altitude. An aircraft will typically accelerate during a go-around in order to remain safely above stall speed, whereas a landing aircraft (even if the altitude report is incorrect) will typically report slow speeds, often in the 20–30 kt range for taxiing on the ground after landing.
- Method 5: Check flight phases and extract points where the phase changes from Descent to either Level or Climb at an altitude below 2500 ft. For each of these phase change points, create a mini-trajectory comprising of the next 120 s of flight data or if such a length of time is not available then create a mini-trajectory from as much flight data as remains. Next, extract the total number of points in this trajectory and count the number of points in this trajectory with an altitude greater than 500 ft and a vertical speed greater than 200 ft/min. Compute the percentage of trajectory points satisfying the altitude and vertical speed criteria. If this is greater than 50% then flag the trajectory as a go-around. Reasoning: A landing aircraft will always be in the descent flight phase, whereas an aircraft conducting a go-around will either be at level altitude or climbing—so this change of phase can be used as a go-around indicator. To remove false-alarms due to things like holding patterns (where an aircraft may descend and then hold at a given altitude for some time, common at major airports such as Heathrow), check that the altitude and vertical speed indicate a climb in the subsequent data, as we would expect from a go-around. The 50% pass rate was chosen based on manual analysis of 30 go-arounds seen in the OpenSky data at various airports worldwide.
3. Results
3.1. Comparison of Go-Around Detection Methods
3.1.1. Comparison to a Manual Analysis of Go-Around Events
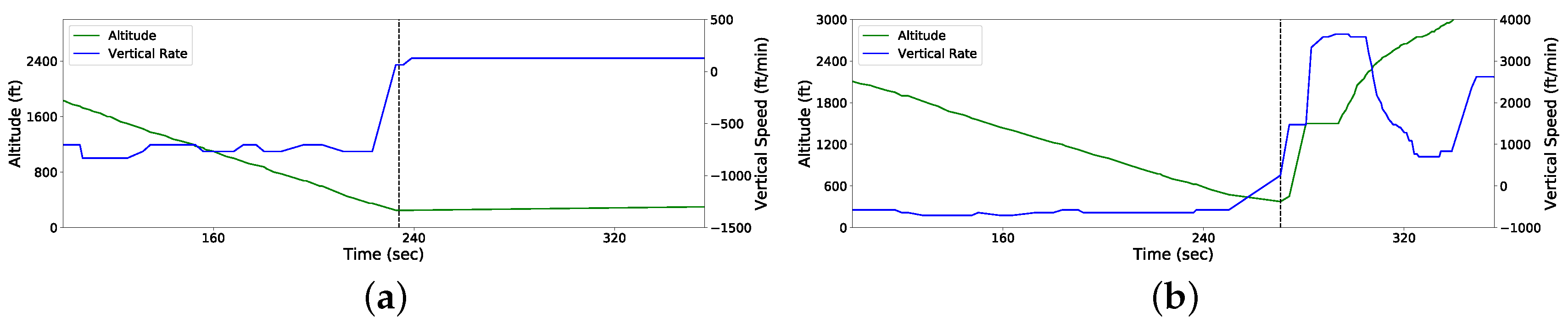
3.1.2. Missing Go-Arounds
3.1.3. Processing Efficiency
3.1.4. Complex Detection Methods Provide better Results
3.2. Analysis of Go-Arounds at VABB
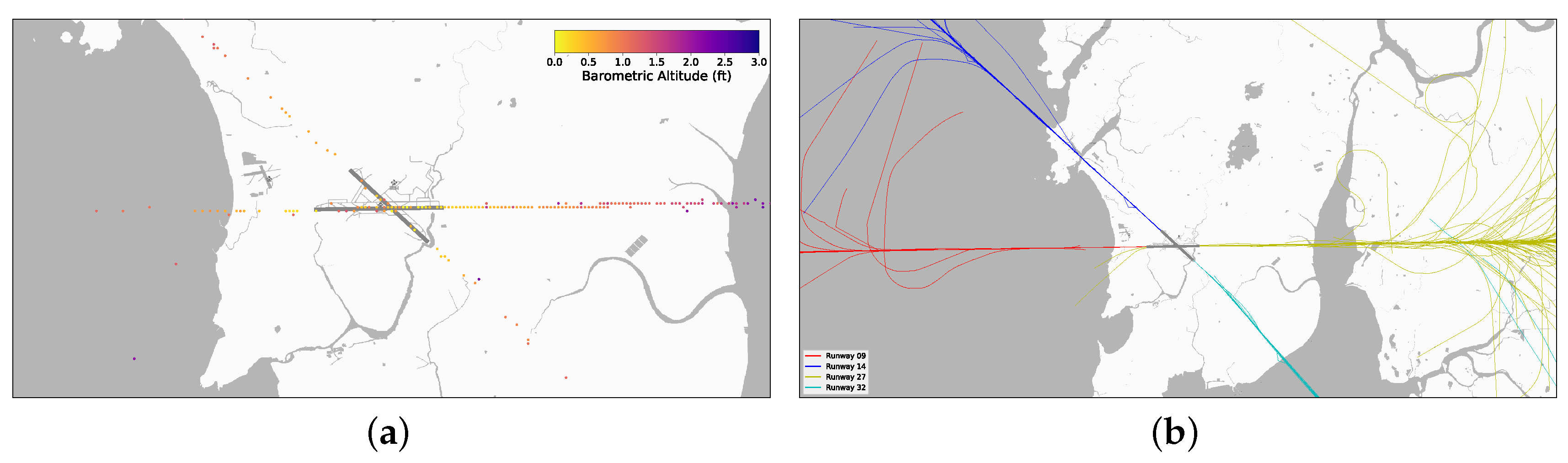
3.2.1. Go-Arounds as a Function of Location
3.2.2. The Role of Meteorological Conditions
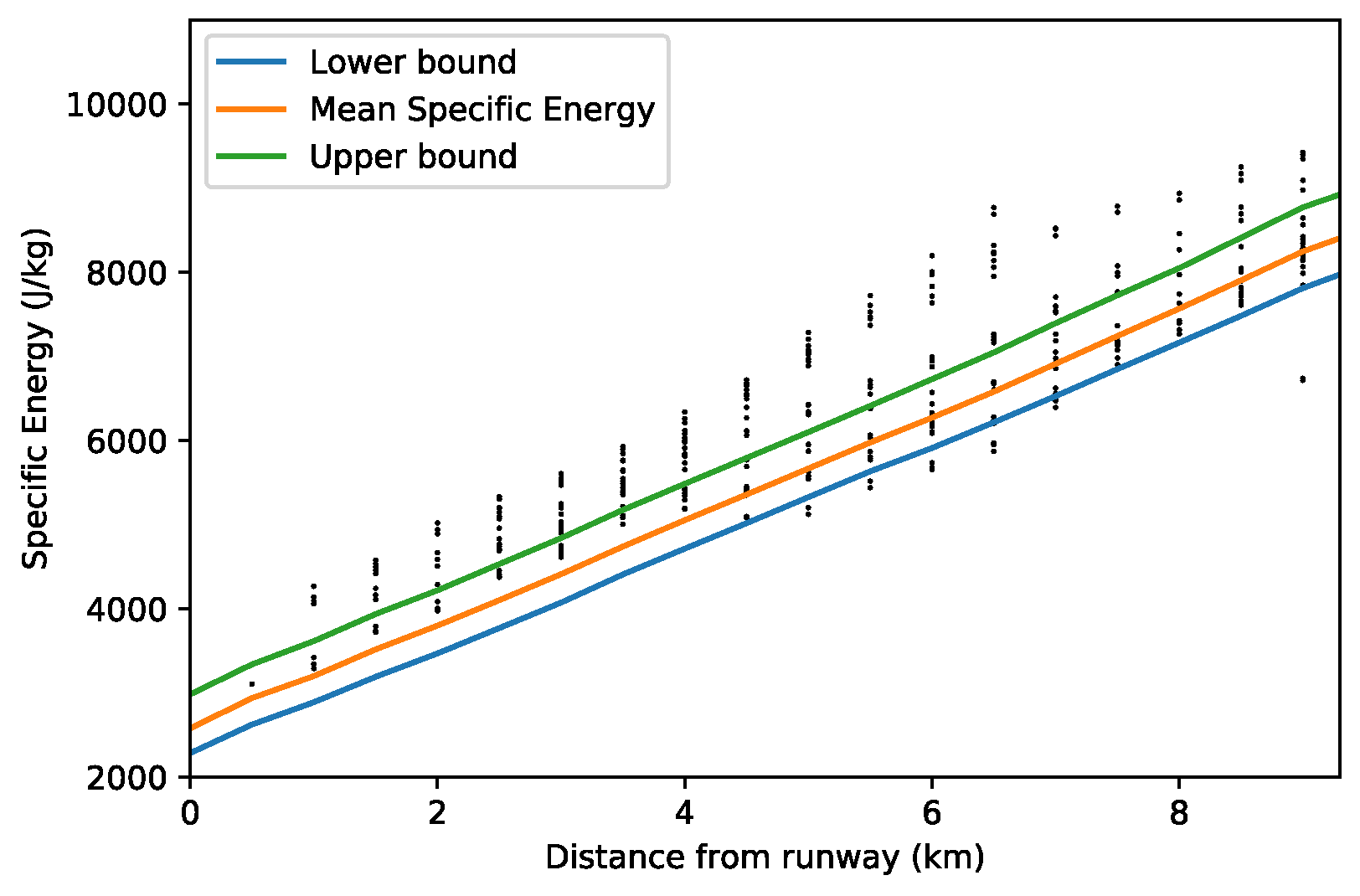
3.2.3. Unstable Approaches
3.2.4. Conflicting Traffic
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Adam, G.; Condette, J. Study on Aeroplane State Awareness during Go-Around; Bureau d’Enquetes et d’Analyses pour la securite de l’aviation civile: Bourget, France, 2013. [Google Scholar]
- de Boer, R.J.; Coumou, T.; Hunink, A.; van Bennekom, T. The automatic identification of unstable approaches from flight data. In Proceedings of the 6th International Conference on Research in Air Transportation, Istanbul, Turkey, 26–30 May 2014; pp. 26–30. [Google Scholar]
- O’Connor, A.; Kearney, D. Evaluating the Effect of Turbulence on Aircraft During Landing and Take-off Phases. Int. J. Aviat. Aeronaut. Aerosp. 2018, 5, 10. [Google Scholar]
- Proud, S.R. Analysis of aircraft flights near convective weather over Europe. Weather 2015, 70, 292–296. [Google Scholar] [CrossRef]
- Helleberg, J. Effects of a final approach runway occupancy signal (FAROS) on pilots’ flight path tracking, traffic detection, and air traffic control communications. In Proceedings of the 2005 International Symposium on Aviation Psychology, Dayton, OH, USA, 2005; p. 293. [Google Scholar]
- Renz-Wieland, A.; Wallenburg, H. Airport Quality: Holding and Go-Arounds; Technical Report; Centrum Wiskunde & Informatica (CWI): Amsterdam, The Netherlands, 2016. [Google Scholar]
- Das, S.; Matthews, B.L.; Srivastava, A.N.; Oza, N.C. Multiple kernel learning for heterogeneous anomaly detection: Algorithm and aviation safety case study. In Proceedings of the 16th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Washington, DC, USA, 25–28 July 2010; pp. 47–56. [Google Scholar]
- Strohmeier, M.; Schäfer, M.; Lenders, V.; Martinovic, I. Realities and Challenges of NextGen Air Traffic Management: The Case of ADS-B. IEEE Commun. Mag. 2014, 52, 111–118. [Google Scholar] [CrossRef]
- Barde, T.; Pantelias, A.; Zerjav, V. Assessment of Airport Performance in India; Royal Institution of Chartered Surveyors (RICS): London, UK, 2016. [Google Scholar]
- Air Traffic Report—August, 2019; Technical Report; Airports Authority of India: New Delhi, India, 2019.
- Schäfer, M.; Strohmeier, M.; Lenders, V.; Martinovic, I.; Wilhelm, M. Bringing up OpenSky: A large-scale ADS-B sensor network for research. In Proceedings of the 13th International Symposium on Information Processing in Sensor Networks, Berlin, Germany, 15–17 April 2014; pp. 83–94. [Google Scholar]
- Strohmeier, M.; Moser, D.; Schäfer, M.; Lenders, V.; Martinovic, I. On the Applicability of Satellite-based Air Traffic Control Communication for Security. IEEE Commun. Mag. 2019, 57, 79–85. [Google Scholar] [CrossRef]
- Gökgöz, F. Anomaly Detection using GANs in OpenSky Network. In Proceedings of the NATO Science and Technology Organization: Big Data and Artificial Intelligence for Military Decision Making, Bordeaux, France, 30 May–1 June 2018. [Google Scholar]
- Trüb, R.; Moser, D.; Schäfer, M.; Pinheiro, R.; Lenders, V. Monitoring Meteorological Parameters With Crowdsourced Air Traffic Control Data. In Proceedings of the ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Porto, Portugal, 11–13 April 2018. [Google Scholar]
- Strohmeier, M.; Smith, M.; Lenders, V.; Martinovic, I. The Real First Class? Inferring Confidential Corporate Mergers and Government Relations from Air Traffic Communication. In Proceedings of the IEEE European Symposium on Security and Privacy (EuroS&P), London, UK, 24–26 April 2018. [Google Scholar]
- Alligier, R. Predictive Distribution of the Mass and Speed Profile to Improve Aircraft Climb Prediction. In Proceedings of the Thirteenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2019), Vienna, Austria, 17–21 June 2019. [Google Scholar]
- Olive, X.; Grignard, J.; Dubot, T.; Saint-Lot, J. Detecting Controllers’ Actions in Past Mode S Data by Autoencoder-Based Anomaly Detection. In Proceedings of the SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018. [Google Scholar]
- Olive, X. Traffic, a toolbox for processing and analysing air traffic data. J. Open Source Softw. 2019, 4, 1518. [Google Scholar] [CrossRef]
- Herzmann, D. ASOS-AWOS-METAR Data Download. Available online: https://mesonet.agron.iastate.edu/request/download.phtml (accessed on 20 February 2020).
- Herzmann, D. Python-Metar, a Python Package that Parses Coded METAR Weather Reports. Available online: https://github.com/python-metar/python-metar (accessed on 20 February 2020).
- Sun, J.; Ellerbroek, J.; Hoekstra, J. Flight Extraction and Phase Identification for Large Automatic Dependent Surveillance–Broadcast Datasets. J. Aerosp. Inf. Syst. 2017, 14, 1–6. [Google Scholar] [CrossRef]
- Sherry, L.; Wang, Z.; Kourdali, H.K.; Shortle, J. Big data analysis of irregular operations: Aborted approaches and their underlying factors. In Proceedings of the 2013 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 22–25 April 2013; pp. 1–10. [Google Scholar]
- Sun, J.; Vû, H.; Ellerbroek, J.; Hoekstra, J. Ground-based wind field construction from mode-s and ads-b data with a novel gas particle model. In Proceedings of the Seventh SESAR Innovation Days, Belgrade, Serbia, 28–30 November 2017. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Runway | Landings | Go-Arounds | Percentage |
|---|---|---|---|
| 09 | 8093 | 26 | 0.321% |
| 14 | 2682 | 37 | 1.380% |
| 27 | 139,677 | 311 | 0.223% |
| 32 | 2095 | 18 | 0.859% |
| Total | 153,765 | 392 | 0.256% |
| Total Flights | Go-Arounds | Take-Offs | Landings | Other |
|---|---|---|---|---|
| 9941 | 56 | 4905 | 4947 | 33 |
| Method | Number Detected | False Alarms | Missed | Critical Success Index |
|---|---|---|---|---|
| Manual | 44 | N/A | N/A | N/A |
| M1 | 14 | 0 | 30 | 0.318 |
| M2 | 45 | 23 | 22 | 0.328 |
| M3 | 26 | 4 | 22 | 0.458 |
| M4 | 26 | 3 | 21 | 0.490 |
| M5 | 43 | 0 | 1 | 0.977 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Proud, S.R. Go-Around Detection Using Crowd-Sourced ADS-B Position Data. Aerospace 2020, 7, 16. https://doi.org/10.3390/aerospace7020016
Proud SR. Go-Around Detection Using Crowd-Sourced ADS-B Position Data. Aerospace. 2020; 7(2):16. https://doi.org/10.3390/aerospace7020016
Chicago/Turabian StyleProud, Simon Richard. 2020. "Go-Around Detection Using Crowd-Sourced ADS-B Position Data" Aerospace 7, no. 2: 16. https://doi.org/10.3390/aerospace7020016
APA StyleProud, S. R. (2020). Go-Around Detection Using Crowd-Sourced ADS-B Position Data. Aerospace, 7(2), 16. https://doi.org/10.3390/aerospace7020016