The Impact of Peukert-Effect on Optimal Control of a Battery-Electrically Driven Airplane



Abstract
1. Introduction
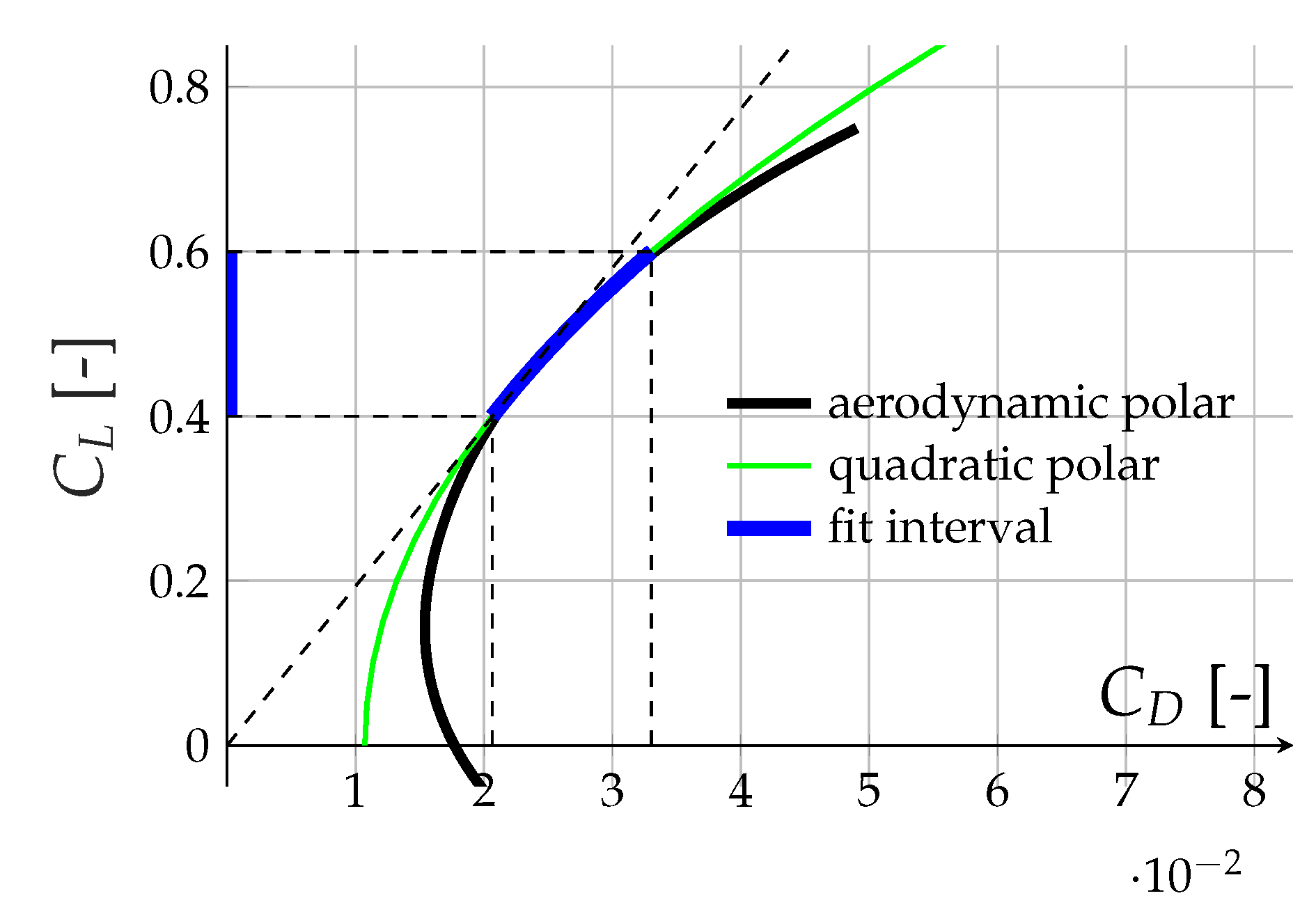
2. Modelling Aspects
3. The Trajectory Optimization Problem
4. Results
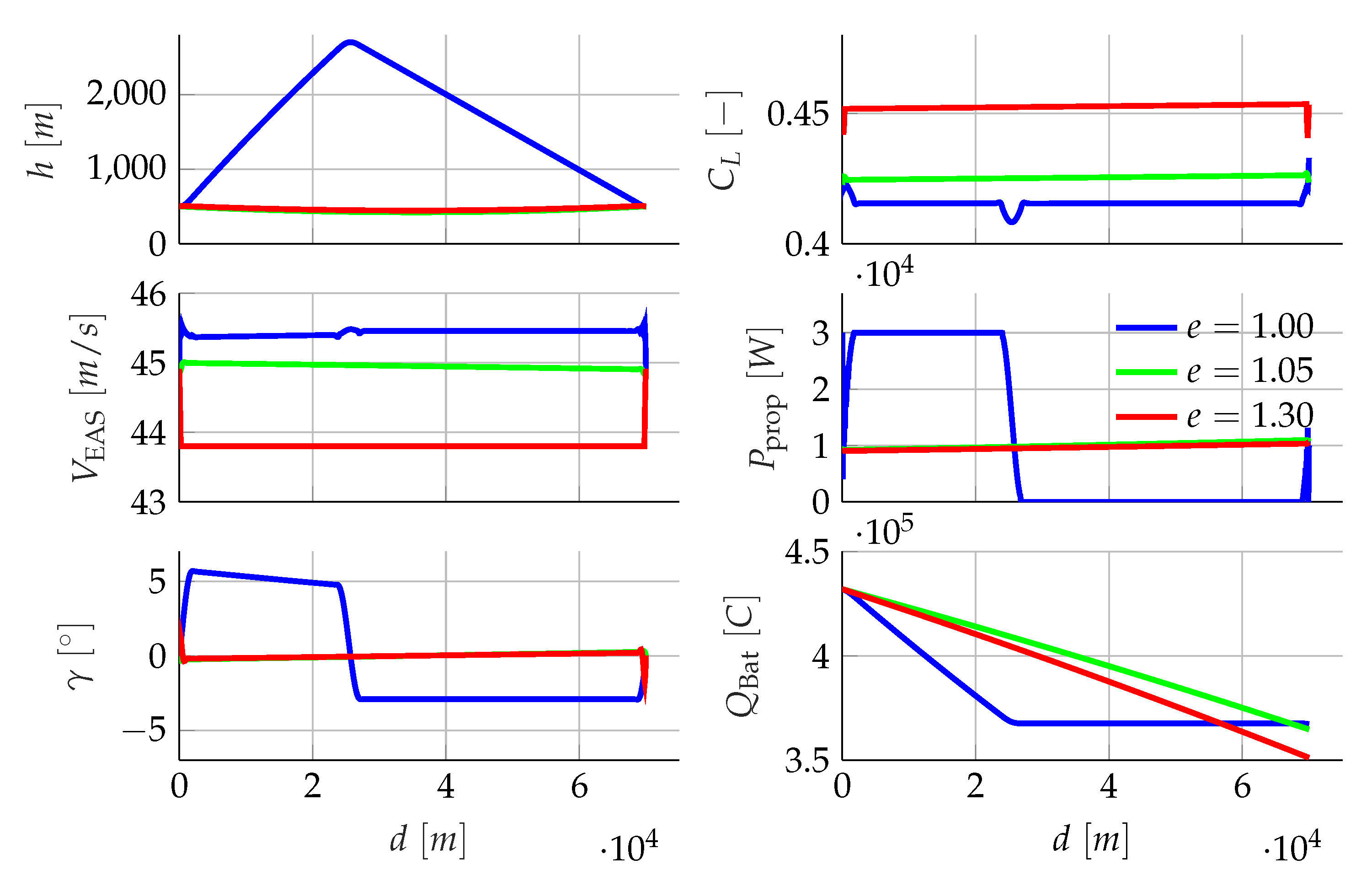
4.1. Optimal Trajectories
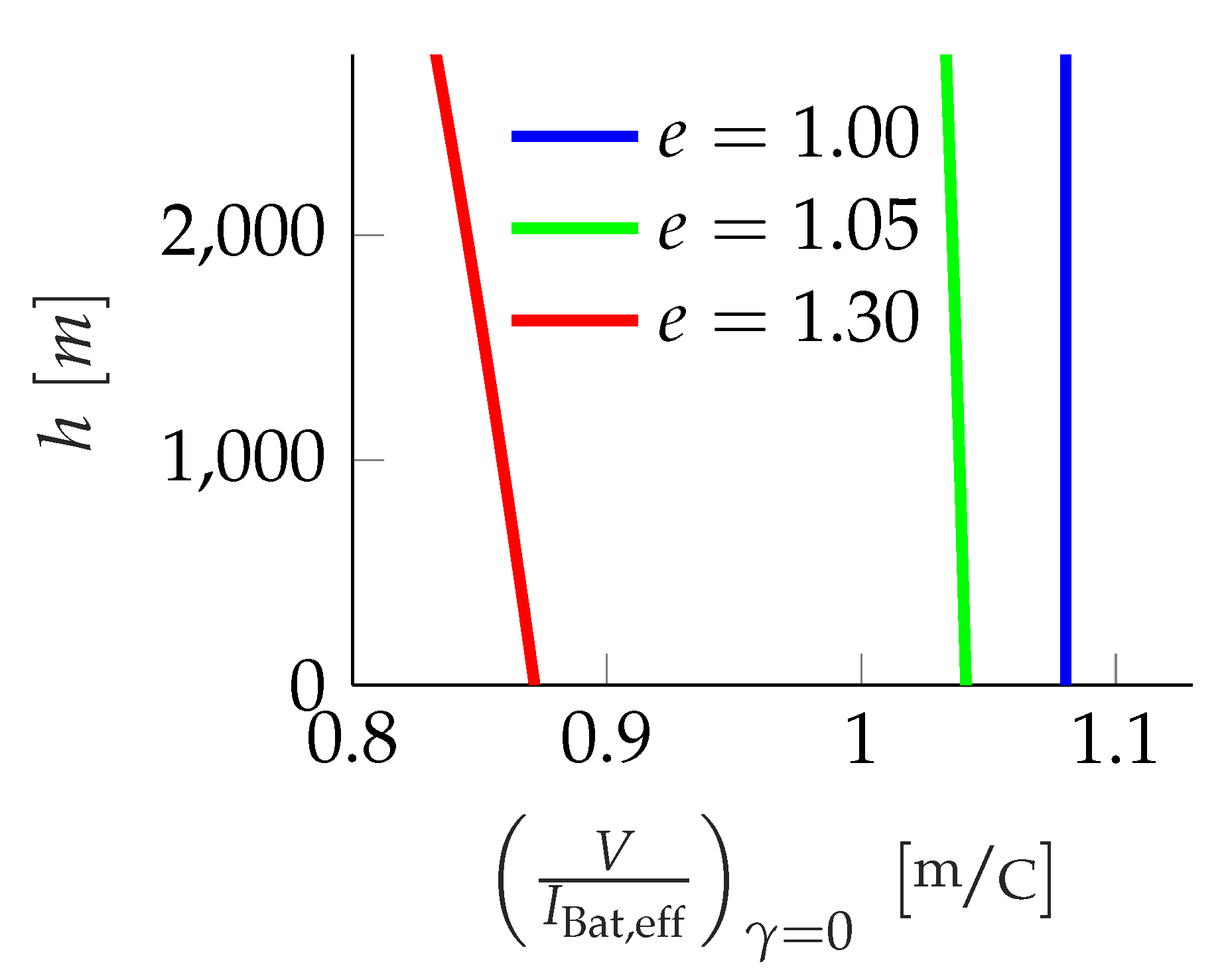
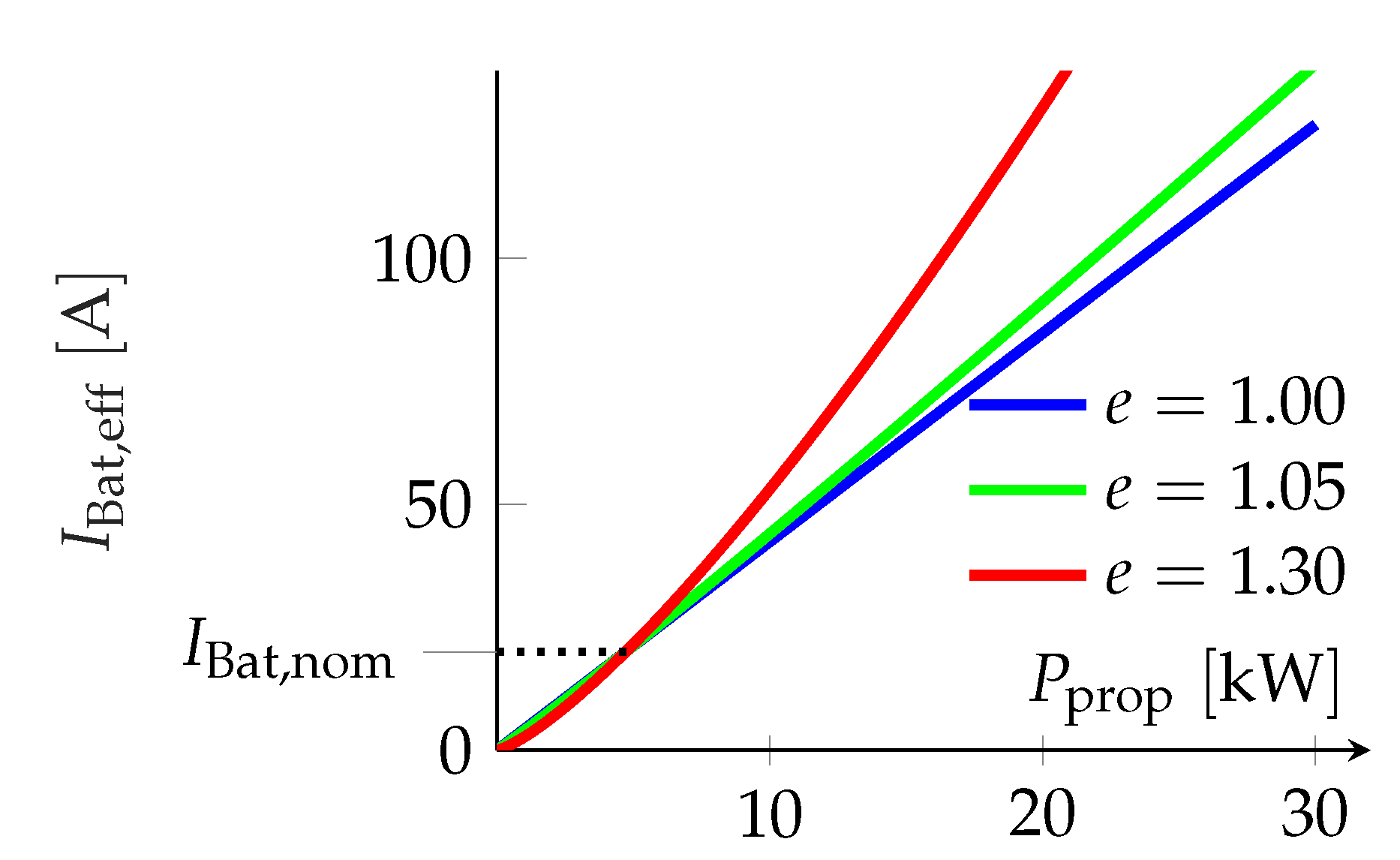
4.2. Steady-State Evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Symbols | Indices | |||
| Time derivative of □ | [⋯] | 0 | zero | |
| Coefficient of □ | [−] | Battery | ||
| D | Drag | [N] | Equivalent Airspeed | |
| d | Distance | [m] | effective | |
| e | Peukert exponent | [−] | electrical | |
| g | Gravitational acceleration | [m/s2] | f | final |
| h | Altitude | [m] | Inverter | |
| I | Current | [A] | Motor | |
| J | Criterion | [C/s2] | minimum | |
| k | aerodynamical Constant | [−] | nominal | |
| L | Lift | [N] | optimal | |
| m | Mass | [kg] | Propeller | |
| P | Power | [W] | propulsive | |
| Parameter vector | [⋯] | total | ||
| Q | Capacity | [C] | ||
| S | Surface | [m2] | ||
| T | Thrust | [N] | ||
| t | Time | [s] | ||
| U | Voltage | [V] | ||
| Control vector | [⋯] | |||
| V | Velocity | [m/s] | ||
| State vector | [⋯] | |||
| Flight path angle | [] | |||
| Efficiency | [−] | |||
| glide path angle | [] | |||
| Air density | [kg/m3] | |||
References
- Sachs, G. Flight Performance Issues of Electric Aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference; American Institute of Aeronautics and Astronautics (AIAA), Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar]
- Sachs, G. Unique Range Performance Properties of Electric Aircraft. In Proceedings of the AIAA Atmospheric Flight Mechanics (AFM) Conference, American Institute of Aeronautics and Astronautics, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Traub, L.W. Range and endurance estimates for battery-powered aircraft. J. Aircr. 2011, 48, 703–707. [Google Scholar] [CrossRef]
- Hepperle, M. Electric Flight – Potential and Limitations. 2012. Available online: http://www.elib.dlr.de (accessed on 16 August 2017).
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819. [Google Scholar] [CrossRef]
- Traub, L.W. Validation of endurance estimates for battery powered UAVs. Aeronaut. J. 2013, 117, 1155–1166. [Google Scholar] [CrossRef]
- Avanzini, G.; Giulietti, F. Maximum range for battery-powered aircraft. J. Aircr. 2013, 50, 304–307. [Google Scholar] [CrossRef]
- Avanzini, G.; de Angelis, E.L.; Giulietti, F. Optimal performance and sizing of a battery-powered aircraft. Aerosp. Sci. Technol. 2016, 59, 132–144. [Google Scholar] [CrossRef]
- Peukert, W. Über die Abhängigkeit der Kapazität von der Entladestromstärke bei Bleiakkumulatoren. Elektrotechnische Zeitschrift 1897, 20, 20–21. [Google Scholar]
- Barufaldi, G.; Morales, M.; Silva, R.G. Energy Optimal Climb Performance of Electric Aircraft. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 0830. [Google Scholar]
- Kaptsov, M.; Rodrigues, L. Electric aircraft flight management systems: Economy mode and maximum endurance. J. Guid. Control Dyn. 2017, 41, 288–293. [Google Scholar] [CrossRef]
- Falck, R.D.; Chin, J.; Schnulo, S.L.; Burt, J.M.; Gray, J.S. Trajectory Optimization of Electric Aircraft Subject to Subsystem Thermal Constraints. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017; p. 4002. [Google Scholar]
- Settele, F.; Bittner, M. Energieoptimale Trajektorien für ein batterie-elektrisches Flugzeug. In Deutscher Luft- und Raumfahrtkongress; Hochschule München, Deutsche Gesellschaft für Luft-und Raumfahrt-Lilienthal-Oberth eV: Garching, Germany, 2017. [Google Scholar]
- Settele, F.; Bittner, M. Energy-optimal guidance of a battery-electrically driven airplane. CEAS Aeronaut. J. 2020, 11, 111–124. [Google Scholar] [CrossRef]
- NASA (Ed.) U.S. Standard Atmosphere; National Aeronautics and Space Administration: Washington, DC, USA, 1976.
- Sachs, G.; Lenz, J.; Holzapfel, F. Unlimited endurance performance of solar UAVs with minimal or zero electric energy storage. In Proceedings of the AIAA Guidance, Navigation, and Control Conference. American Institute of Aeronautics and Astronautics (AIAA), Chigao, IL, USA, 10–13 August 2009; pp. 10–13. [Google Scholar]
- Menon, P.K.; Sweriduk, G.D.; Bowers, A.H. Study of near-optimal endurance-maximizing periodic cruise trajectories. J. Aircr. 2007, 44, 393–398. [Google Scholar] [CrossRef][Green Version]
- Sun, Y.H.; Jou, H.L.; Wu, J.C. Multilevel Peukert equations based residual capacity estimation method for lead-acid battery. In Proceedings of the IEEE International Conference on Sustainable Energy Technologies (ICSET 2008), Singapore, 24–27 November 2008; pp. 101–105. [Google Scholar]
- Rieck, M.; Bittner, M.; Grüter, B.; Diepolder, J. FALCON.m: User Guide; Version 1.14; Technische Universität München: Garching, Germany, 2016. [Google Scholar]
- Waechter, A.; Laird, C.; Margot, F.; Kawajir, Y. Introduction to IPOPT: A tutorial for downloading, installing, and using IPOPT. Revision 2009. [Google Scholar]
- MathWorks. mex—Build MEX function or engine application. Matlab Documentation. Mathworks, Natick, Massachusetts. Available online: https://de.mathworks.com/help/matlab/ref/mex.html (accessed on 20 November 2019).
- Settele, F.; Knoll, A. Grundlagen der Flugführung beim elektrisch angetriebenen Forschungsflugzeug EUROPAS. In Deutscher Luft- und Raumfahrtkongress; Hochschule München, Deutsche Gesellschaft für Luft-und Raumfahrt-Lilienthal-Oberth eV: Augsburg, Germany, 2014. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1.00 | 1.05 | 1.30 | |||
| climb | glide | ||||
| 30 | 0 | ≈10.0 | ≈9.9 | ||
| ≈147 | 0 | ≈44.2 | ≈50.8 | ||
| − | |||||
| − | |||||
| Iterations | 274 | 34 | 53 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Settele, F.; Holzapfel, F.; Knoll, A. The Impact of Peukert-Effect on Optimal Control of a Battery-Electrically Driven Airplane. Aerospace 2020, 7, 13. https://doi.org/10.3390/aerospace7020013
Settele F, Holzapfel F, Knoll A. The Impact of Peukert-Effect on Optimal Control of a Battery-Electrically Driven Airplane. Aerospace. 2020; 7(2):13. https://doi.org/10.3390/aerospace7020013
Chicago/Turabian StyleSettele, Ferdinand, Florian Holzapfel, and Alexander Knoll. 2020. "The Impact of Peukert-Effect on Optimal Control of a Battery-Electrically Driven Airplane" Aerospace 7, no. 2: 13. https://doi.org/10.3390/aerospace7020013
APA StyleSettele, F., Holzapfel, F., & Knoll, A. (2020). The Impact of Peukert-Effect on Optimal Control of a Battery-Electrically Driven Airplane. Aerospace, 7(2), 13. https://doi.org/10.3390/aerospace7020013