1. Introduction
Since the beginning of the space era, the procedures for cooperative rendezvous and mating of large manned and autonomous spacecraft have been deeply investigated [
1], while research on small satellite docking and uncooperative bodies capture is still under development. In fact, close approach and joining phases require complex GNC (Guidance, Navigation, and Control), precise position sensors, significant propellant consumption, and dedicated mating interfaces.
With regard to small satellites, the research is mostly focusing on the enabling technologies (from miniaturized docking mechanisms [
2,
3] to navigation sensors [
4,
5] and strategies [
6]); few space demonstrations of small satellites RV/D are currently under development [
7,
8]. Similarly, in the field of uncooperative bodies capture, no in-orbit demonstration has been performed yet. The growing interest on ADR (Active Debris Removal) missions is, however, encouraging the development and the ground test of novel capture systems [
9] as well as the relative GNC technologies (e.g., [
10,
11]).
The employment of tethered systems for close approach and docking/capture phases has been proposed to simplify or integrate the procedures currently under investigation; interesting contribution have been proposed by the Polytechnic of Milano [
12,
13,
14,
15,
16] and the University of Padova [
17,
18,
19]. Such systems allow to create low-stiffness connections between the involved bodies, reducing the risk of undesired collision by allowing safe-distance operations; furthermore, under certain well described conditions, the dynamics of tethered system is stable [
20], allowing slow and safe proximity operations.
TED Concept and Advantages
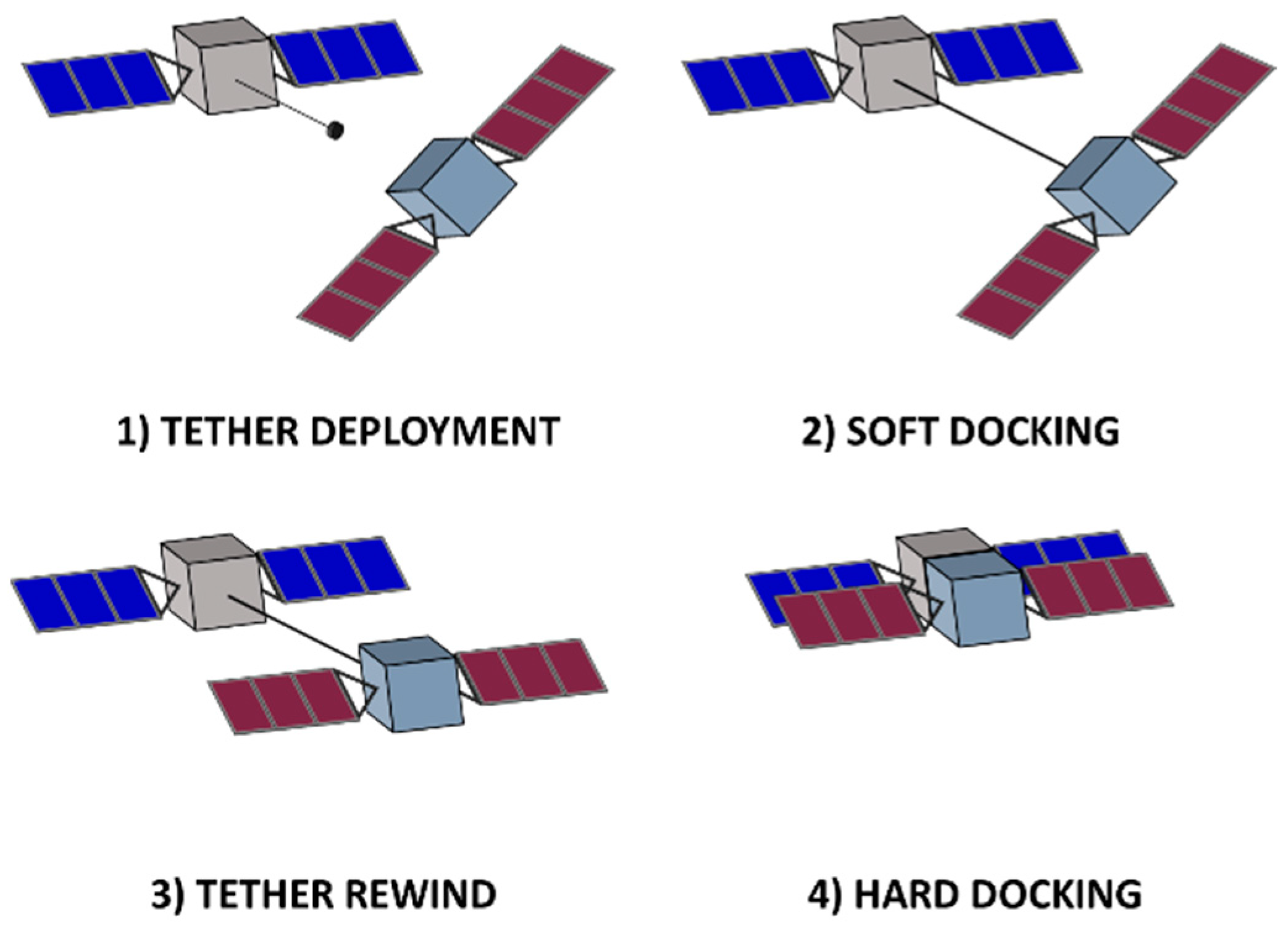
On these considerations, the Tethered Electromagnetic Docking (TED) procedure is proposed for close rendezvous and joining. Thanks to the use of a small tethered probe, ejected by the chaser and captured by the target by means of electromagnetic interactions, a low stiffness connection between the vehicles can be provided; the joining maneuver between the two bodies can therefore be realized simply rewinding the tether, avoiding any propellant consumption.
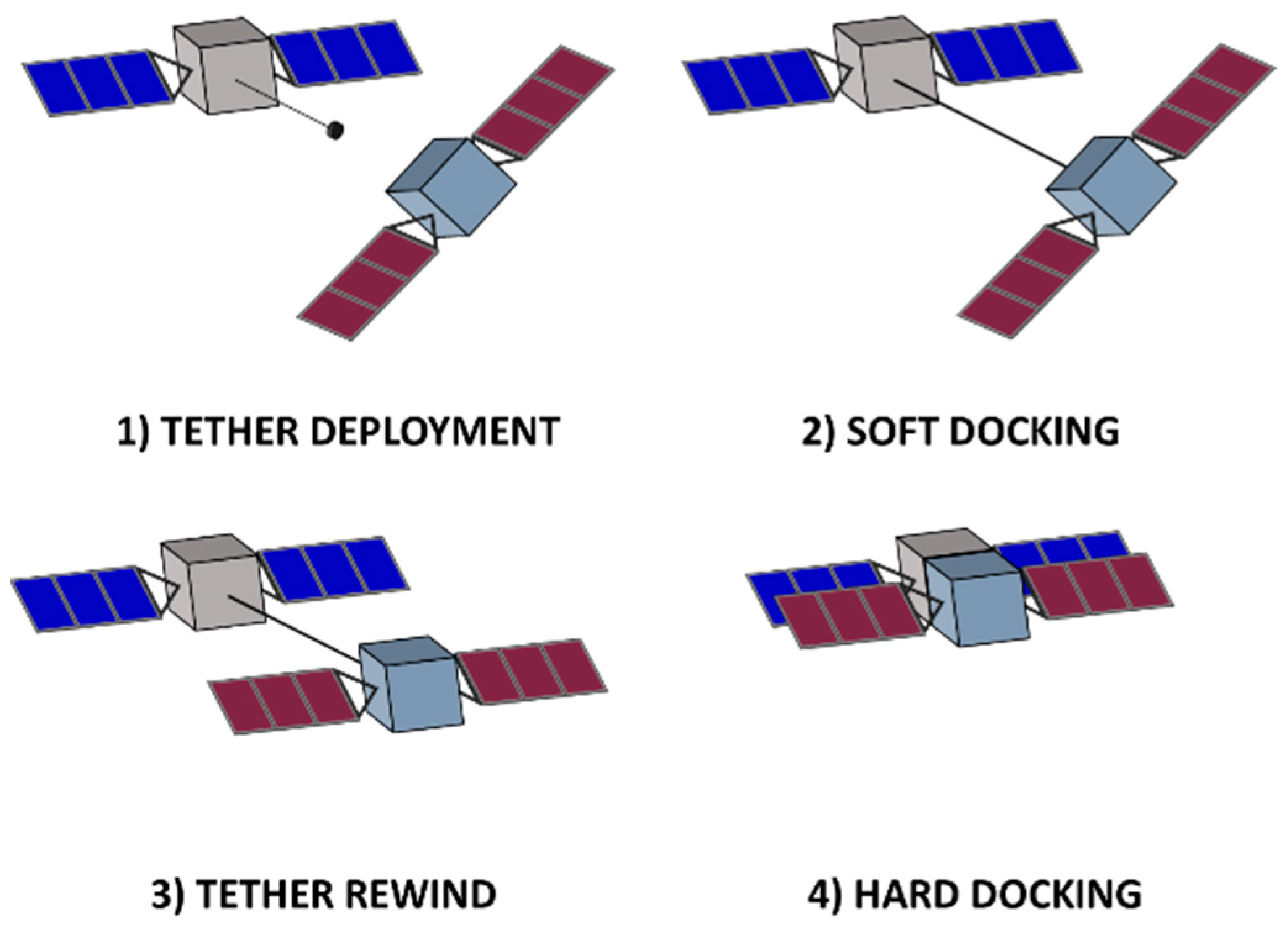
Figure 1 depicts TED procedure; first (1) the tethered probe is launched thanks to a propulsive mechanism, able to monitor and control the tether motion with a brake system. When the probe reaches the sphere of influence of the electromagnetic interface mounted on the target (i.e., the volume in which the target-generated electromagnetic field is greater than the Earth magnetic field), it aligns and self-guides to mate with it; (2) an active probe can be also employed to increase the working range, or in case of passive ferromagnetic interfaces on the target. After the achievement of soft docking, the tether provides the low stiffness connection between the two spacecraft; finally, after (3) the two-body dynamics has been stabilized; (4) the tether allows to safely join chaser and target by rewinding it.
TED concept aims to be a competitive solution to standard close-range rendezvous and mating operations, allowing the reduction of proximity navigation and guidance requirements between chaser and target spacecraft. The advantages of this method could contribute to enable a large number of future on-orbit servicing missions; in particular, it will be possible to execute joining operations even between small satellites, despite of their limited resources, as TED is not requiring propulsion capabilities and extremely precise attitude and position determination and control to perform the close rendezvous and soft docking maneuvers [
19,
21]. In addition, TED could be employed for disposal operations on malfunctioning or non-operative spacecraft already equipped with a small ferromagnetic interface; with respect to proposed autonomous re-entry devices (e.g., [
22,
23]) or servicing ports, a passive interface compatible with TED would negligibly affect spacecraft design nor require on-board resources. This would make TED technology appealing for applications such as large constellations malfunctioning spacecraft disposal.
It is worth pointing out that the benefits of this novel docking strategy with respect to the standard docking procedures are not limited to fuel savings and GNC accuracy [
18,
20]: first, a remarkable advantage can be envisaged in the negligible impulsive force transmitted by the small probe to the target during the soft docking connection; second, TED would increase the docking maneuver reliability allowing the tether retrieval in case of unsuccessful deployment and subsequent docking attempts [
21].
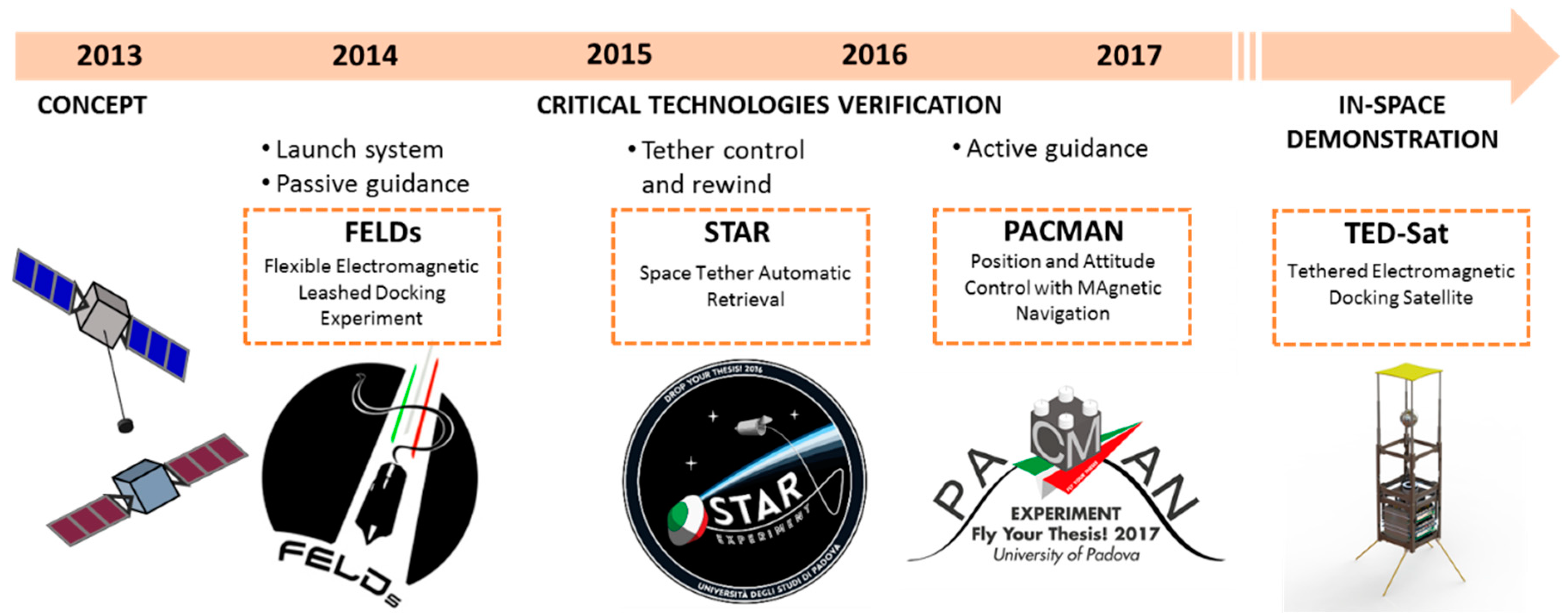
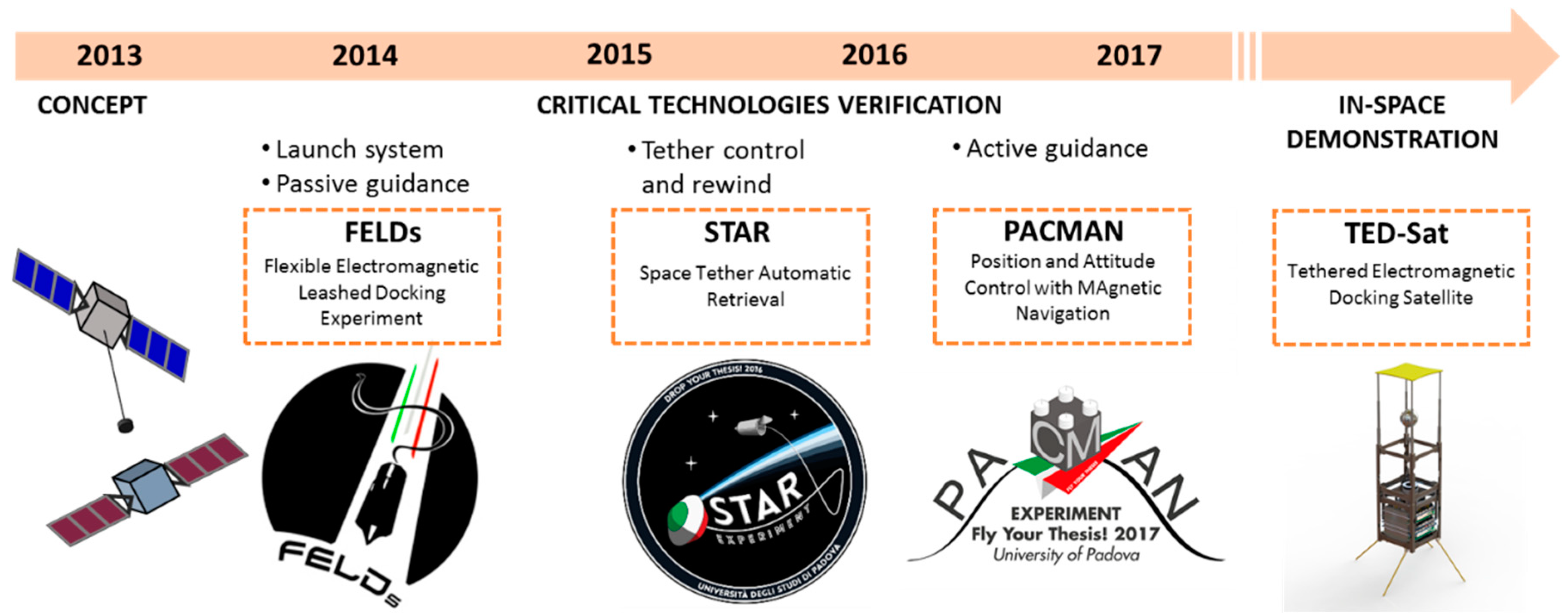
TED demonstration is subjected to the development of some critical technologies and their verification in relevant environment. For this reason, reduced-gravity experiments have been designed and realized by our students in the framework of TED development plan, as depicted in
Figure 2, with the goal of an in-space demonstration (TED-Sat). The critical technologies for launch and passive proximity guide and for tether deployment and retrieval have been demonstrated in two test campaigns: FELDs (Flexible Electromagnetic Leash Docking system) [
24] and STAR (Space Tether Automatic Retrieval) [
25] were selected for ESA Education Office’s “Drop Your Thesis!” program [
26], that, through the use of ZARM drop tower [
27], gives university students the opportunity to perform scientific or technological research in microgravity conditions. Similarly, PACMAN (Position and Attitude Control with MAgnetic Navigation), in the framework of ESA Education Office’s “Fly Your Thesis!” program [
26], tested active magnetic proximity operations during a campaign of parabolic flights [
28].
The following section will introduce TED technologies verification, while
Section 4 will describe students’ participation and the educational outputs of the whole project.
2. TED Critical Technologies Verification
As previously mentioned, the development of TED is subjected to the verification of few critical technologies. In particular, with respect to the tethered operations, the probe deployment and retrieval requires the employment of (1) a reliable launch mechanism and (2) a controlled tether deployment and retrieval system. The electromagnetic guide and docking also need verification for both (3) passive uncontrolled operations and (4) active electromagnetic relative attitude and position control and joining. The following subsections will discuss in detail the requirements and the working principle of these four critical technologies.
2.1. Representativeness of the Technology Verification
The timescale and the environmental conditions of the technology verification experiments are clearly not representative of TED operations, since test platform dimensions and microgravity timescales do not allow the deployment of tens of meters tether. Furthermore, orbital dynamics effects such as gravity gradient or Coriolis force due to orbital motion, cannot be reproduced in the ground facility. Nevertheless, it must be underlined that the proposed verifications were not focused on tether dynamics study but on the single subsystem’s functions. In addition, in TED operative scenarios (close range operations, i.e., at relative distances of less than 100 m [
1], and slow deployment and retrieval velocities, i.e., minor than 1 m/s) the orbital dynamics effects along the tether longitudinal motion are de facto negligible with respect to the forces exerted by the deployment hardware (launch system inner fraction, brake-induced tether tension, soft docking electromagnetic interactions).
In particular, the deployer performance was expected to be representative to a full-scale mission, even with a deployable length in drop tests limited to 1 m or less. The reason for this is that the control technique adopted for controlling the experiment makes use only of the length and length rate state, and not the libration angle and its rate. The controller is in fact blind to the tether libratory motion, and it manages to control the experiment in the same way that it would do in on-orbit conditions.
2.2. Launch System
TED launch system objective is to release the tethered probe towards the target with a desired initial velocity. In-space tethered deployments have been performed mainly using two technologies: propelled probes (e.g., TSS-1 [
29]) or spring-based systems (e.g., SEDS, YES [
29]). Considering TED operations, a spring-based system was chosen, since it is easily settable to give a specific speed to the probe, it is easily reloaded trough recompression and, finally, it can be used for many launch attempts without consuming propellant.
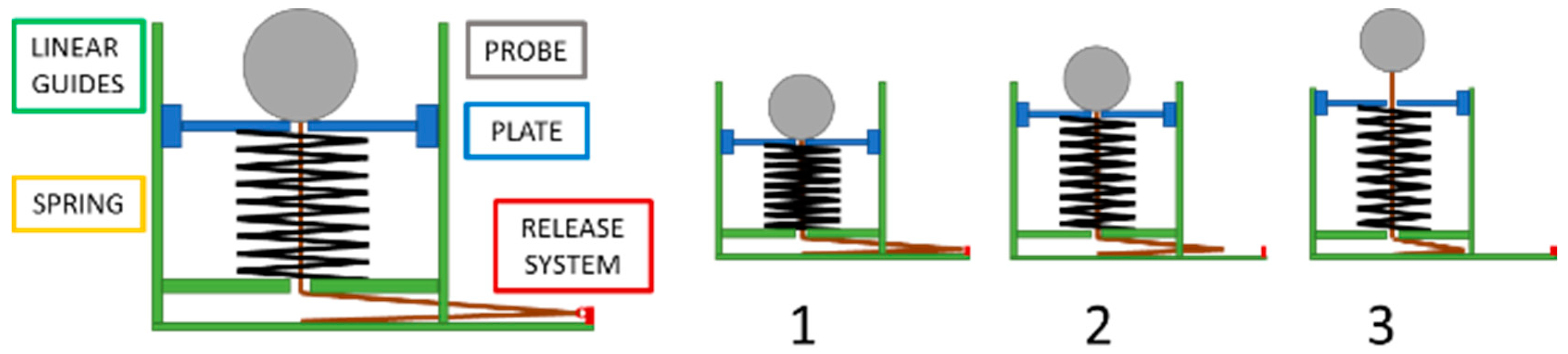
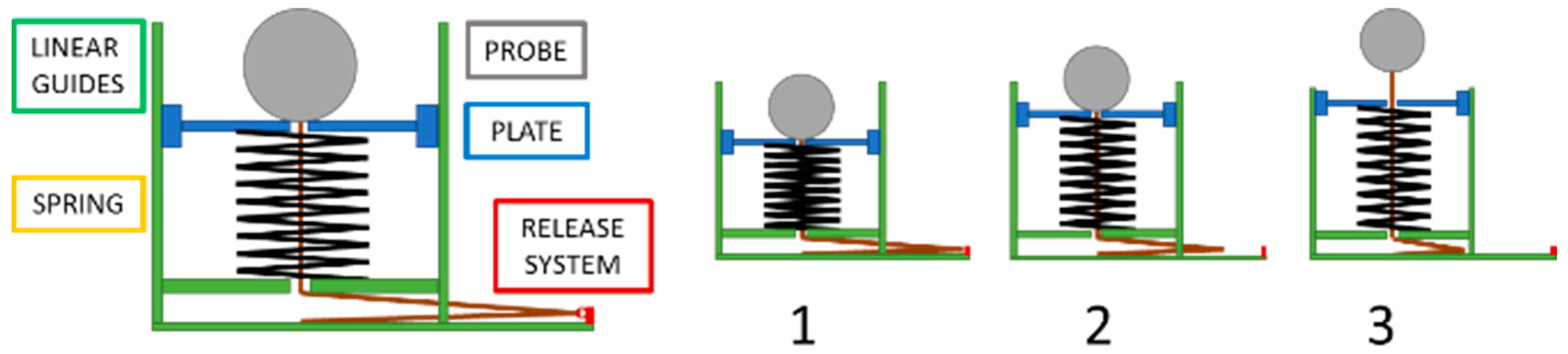
The launch system working principle is reported in
Figure 3: it is composed by a release system, a spring, three linear guides, and the tethered probe. The probe is supported by an interface disk, able to glide on the three vertical guides. (1) As the release system frees the tether, (2) the plate is free to move, pushed by the spring, (3) driving the probe until the end of the guides.
The first prototype of this concept, shown in
Figure 4, employs for simplicity a single-shot actuator for the release system instead of a reusable mechanism. This solution was initially preferred during the design phase because of its simplicity, allowing the investigation to focus on the other elements of the deployer, i.e., the spring-plate-probe dynamics, in particular the effect of friction during launch. The launch system was tested in the FELDs experiment [
24], the microgravity verification consisted in five drop tests at ZARM drop tower; three were completely successful, while the last two drops failed due to malfunctions during the release, which caused the tether to snag into the internal mechanism, increasing friction and slowing the probe. Detailed data on the experiments is reported in
Table 1 and in [
24,
30,
31].
The STAR launch system (
Figure 5, up) was designed to prevent such failures and allows a smoother tether release, employing a stronger spring to give the tethered probe a higher initial velocity, winding the tether on a spool aligned with the launch direction and substituting the release mechanism with an electromagnetic one [
25,
32]. For all the five tests the launch system worked nominally, releasing the tethered probe with the expected initial velocity of 30 cm/s (
Figure 5, down). After the end of the STAR experiment, it can be stated that the launch system TRL is 6, having demonstrated the critical functions in the microgravity environment of ZARM drop tower in Bremen. Further details on the microgravity campaign are reported in [
25,
33].
2.3. Tether Controlled Deploy and Retrieval
The demonstration of the capability of controlled deployment and retrieval of the tethered probe is fundamental in TED development.
Over the past few years, an impressive number of contributions and deep insights have been made to widen understanding of tether dynamic behavior in space, making the physics at the basis of such systems well-known. However, the deployment of a space tether has always been a critical issue in the past space tether missions. In fact, what emerges from literature and heritage in this field is that a successful employment of space tether requires extremely good mechanical design of deployers and brakes, as well as highly robust and adaptive control strategies [
34,
35,
36]. At present, both space agencies and aerospace industries are interested in the tether related technology to enable various mission concepts (e.g., [
37,
38]).
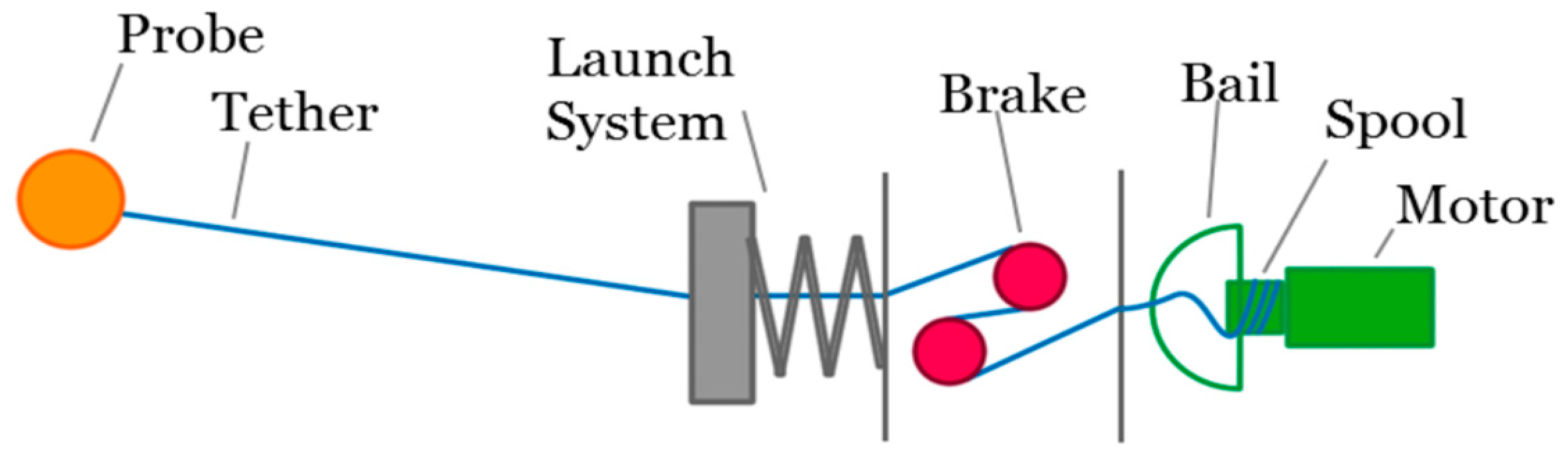
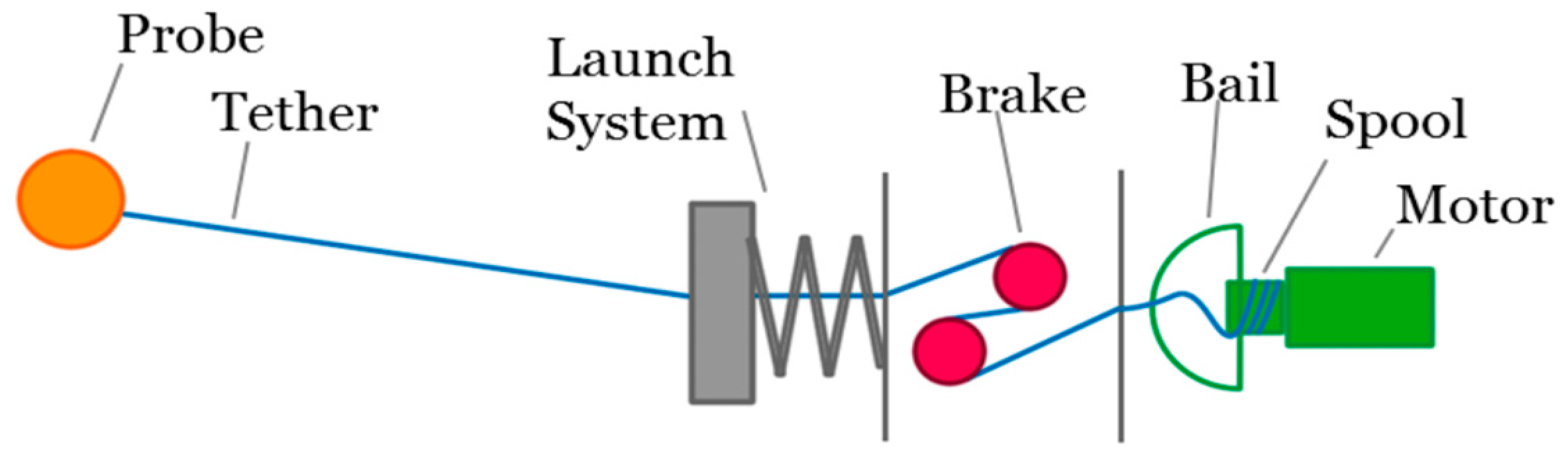
In this context, due to the lack of available technologies for both tether deploy and retrieval, a novel mechanism had to be developed and tested for TED application, with the desired characteristics of (1) low inertia and low friction on the reel, (2) tether retrieval capability, and (3) deployment/retrieval control. In
Figure 6 a sketch of the developed mechanism is reported. The deployment is meant to be initiated by the aforementioned spring-based launch device. The deployer has a dedicated active brake mechanism, whose aim is to control the tether tension during the deployment, whilst an electric motor has the task to retrieve the tip mass once the deployed tether has been engaged by a dedicated locking mechanism (bail). More specifically, the tether prior to deployment is wound up around a fixed spool, and it is free to flow out from the spool with minimal inertia (without trailing rotating parts). In this way, there is negligible resistance to the tether exit motion (the mere tether inertia). The tip mass is driven along the desired path by means of the tether tension, that is controlled by the brake mechanism.
The brake [
33,
39] is based on two non-rotating cylinders (rollers), mounted on a rotating frame, with the tether passing between them, as reported in
Figure 7 (left). Whenever the braking action is required to change its intensity, a servomotor changes the angle of the brake: this has the effect of modifying the contact surface between the tether and the brake, thus the friction that the latter provides to the tether’s motion (
Figure 7, right). The relationship that ties the brake angle with the friction imposed to the tether is derived from the capstan equation [
40] and can be modelled with an exponential function of the friction coefficient and the contact surface; a complete explanation of the dynamics of the actuator is reported in [
41]. It is worth noting that the tether tension is not dependent on the total brake dimensions, but only on the contact surface.
The control technique adopted for controlling the tether deployment and retrieval makes use only of the tether length and length rate. The control logic and the tether measure system are reported in [
33,
39]; further investigation on adaptive controls (e.g., considering in case of safe capture the mass variation between deployment and retrieval) has been proposed.
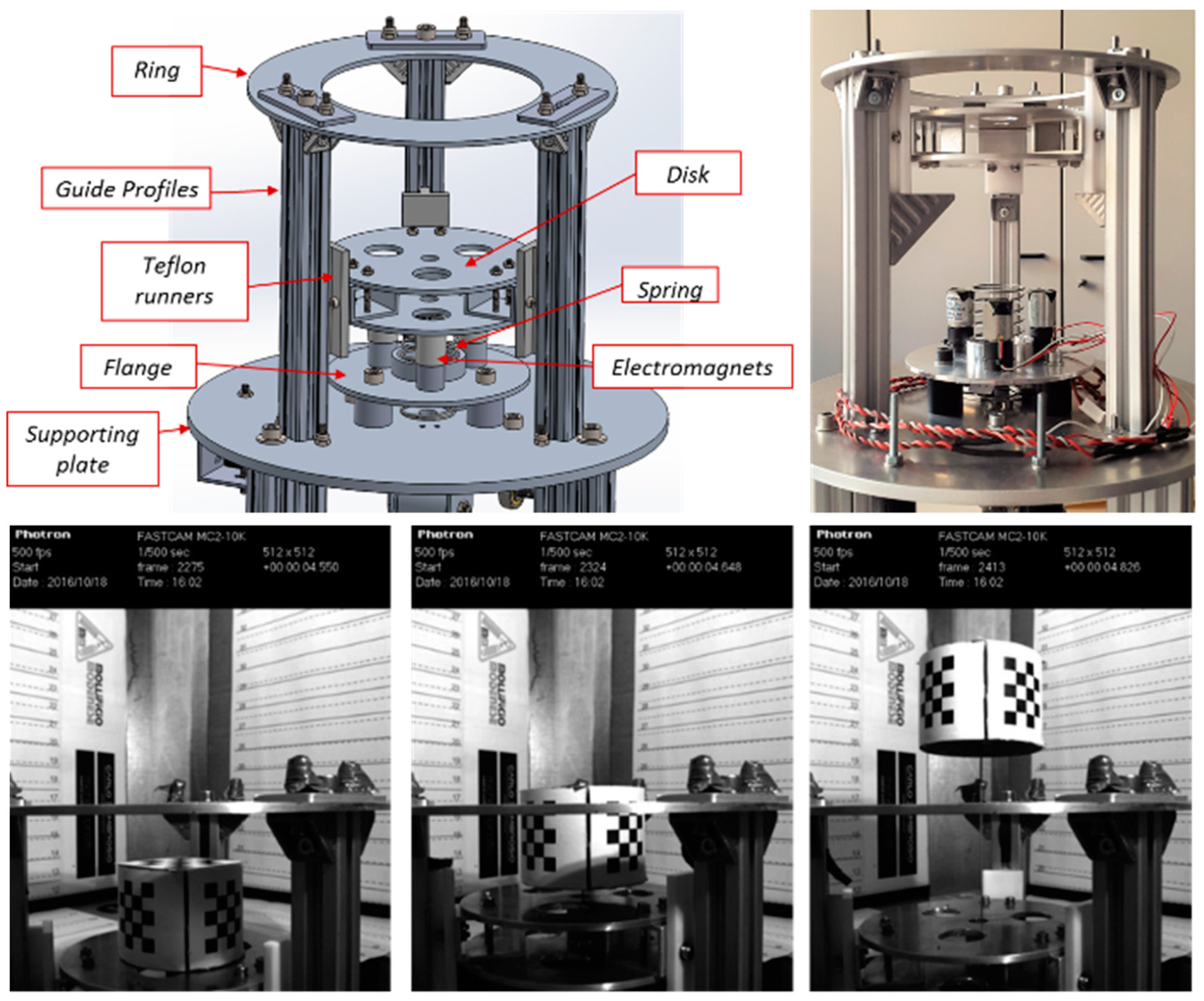
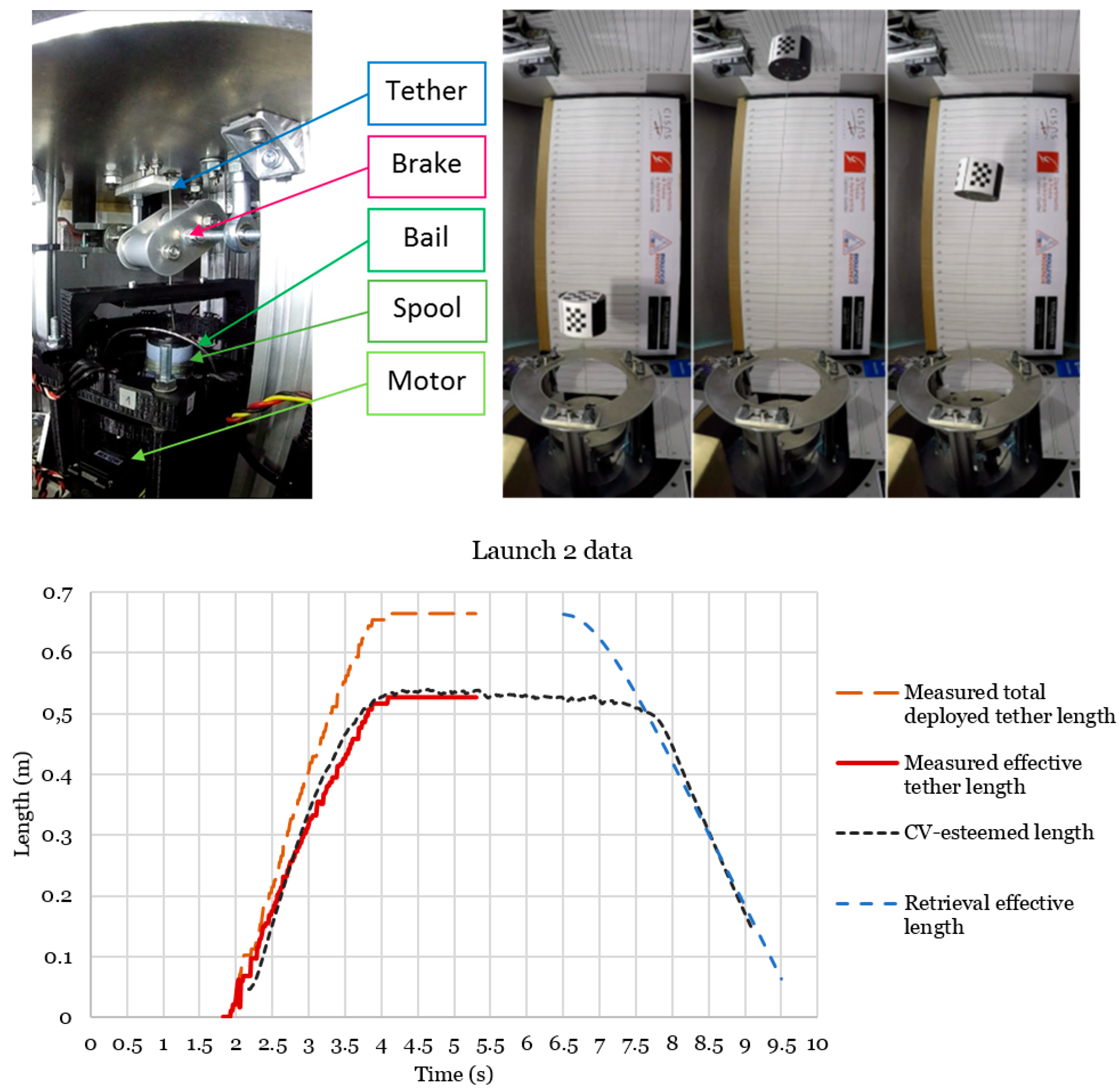
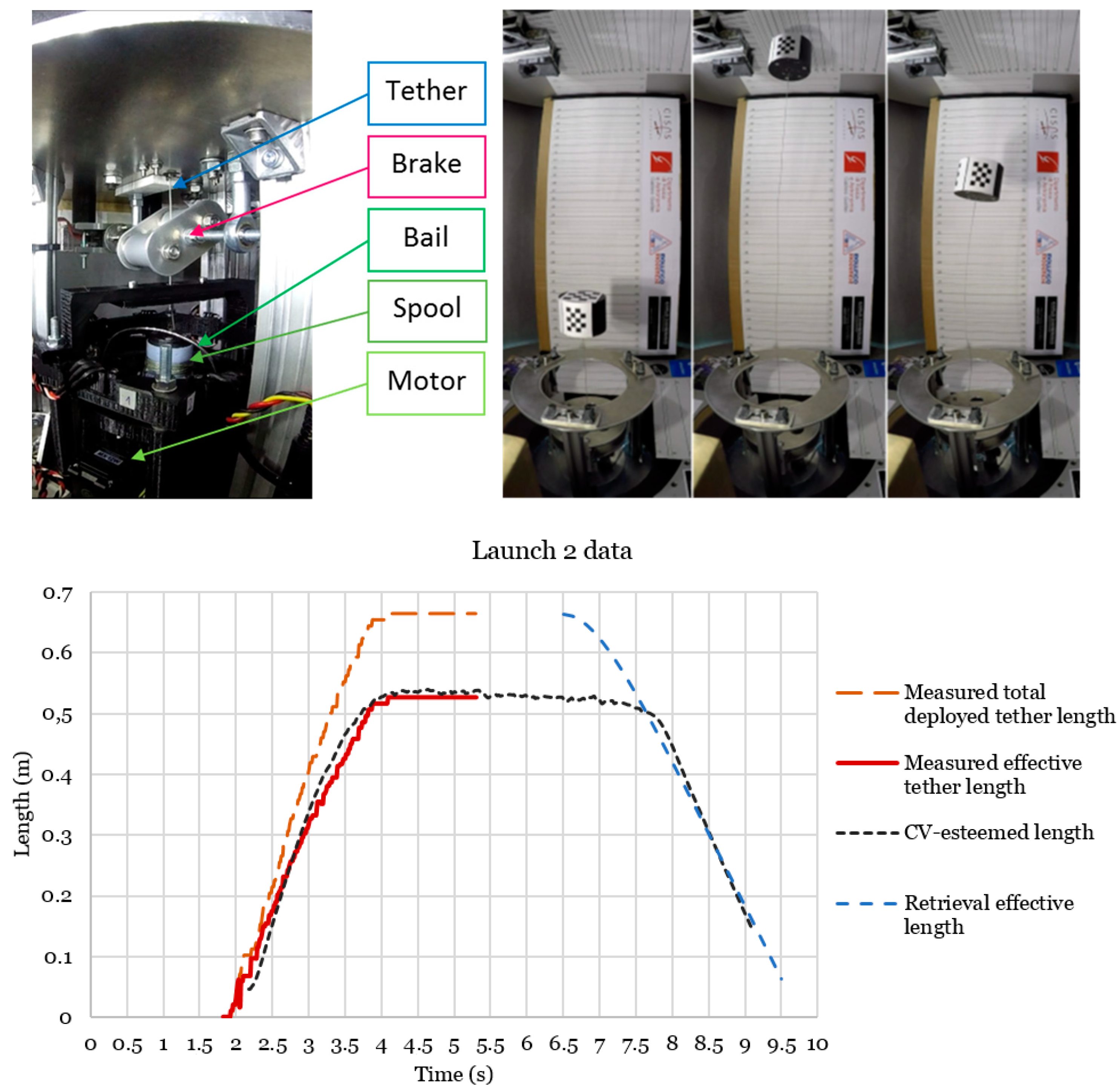
The tether reel system was tested by the STAR experiment [
25]; the tested hardware is reported in
Figure 7 (left) and was subjected to five tests in the drop tower; details on each test are reported in
Table 2 and in [
41]. In
Figure 7, right, are reported three frames from a microgravity test video. It is possible to see that the system was able to deploy the probe and retrieve it to the original launch position. Data on tether deployment for test 2 are reported in
Figure 8 (down): with respect to the probe position (camera video data, grey dotted line), measures on the total tether length first unraveled from the spool (orange dashed line) and then rewound around it (blue dashed line) slightly differ. This behavior can be modelled (red solid line) considering that during deployment the tether can partially drag its windings due to friction; the brake control system has been designed to address this issue. All the five tests were successful, with only minor off-nominal behaviors due to the necessity to tune the brake and the reel control systems. In particular, delay in the experiment start command affected the first two drops, while an error in the fourth launch control algorithm boundaries definition caused the probe to hit the control volume ceiling; in drops 1 and 5, minor bounce-backs were detected at the end of the deployment, due to excessive brake actions. In all cases, the retrieval operations were completely successful and only the control algorithm parameters require minor tuning. Test analysis confirmed that the experiment was successful and the deployer was substantially functional. At the end of STAR project, the tether deployment and retrieval reached a TRL of 6.
2.4. Uncontrolled Magnetic Self-Guide
The objectives of the tether launch and deployment systems are to place the TED probe in proximity of the target, i.e., into the volume of influence of the electromagnetic field generated by the target and/or the probe itself; proximity operations by means of electromagnetic interactions are therefore foreseen to complete the rendezvous and docking.
A relevant work on proximity electromagnetic navigation is represented by the RINGS (Resonant Inductive Near-field Generation System) project in the framework of MIT SPHERES program. In the on-orbit tests on the ISS, the SPHERES vehicles were equipped with large coils, in order to generate electromagnetic coupling actions for both power transfer and relative navigation [
42]. In parallel, a simpler technology was designed and tested in ground laboratories by Underwood and Pellegrino [
43] on low friction tables, in the framework of the AAREST program for in-orbit assembly of a space telescope.
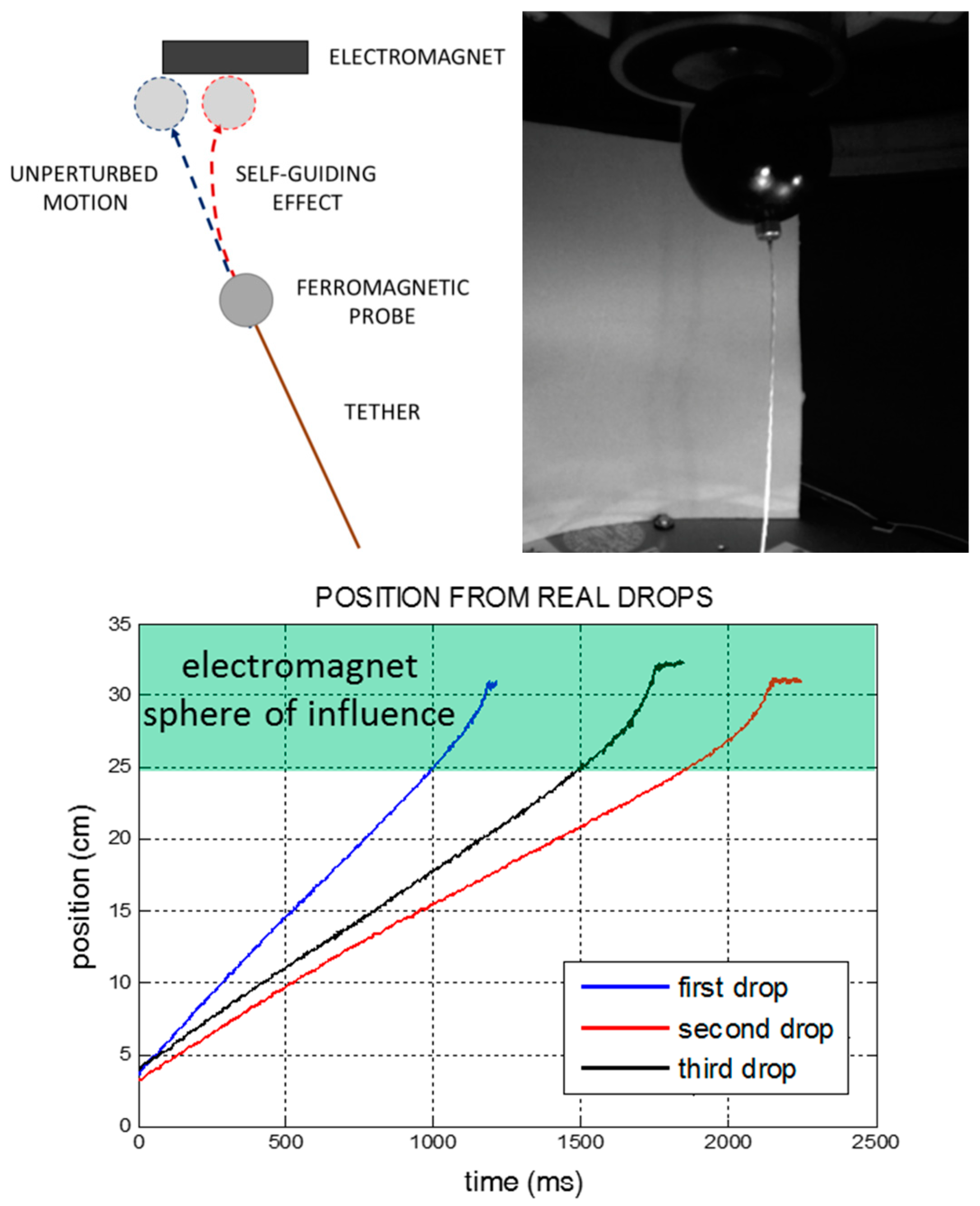
In the case of TED uncontrolled passive probes, the self-guidance effect is fundamental to complete the soft-docking maneuver by moving the probe to contact the target. A simplified scenario was investigated, employing a ferromagnetic tethered probe and a fixed electromagnetic target, as reported in
Figure 9. The proposed layout also allows to investigate the momentum and energy transfer due to the probe impact on the target.
The self-guidance effect was tested by the FELDs experiment in the framework of ESA Education Office “Drop Your Thesis! 2014” program at the ZARM Drop Tower in Bremen [
24]. Three successful drop tests performed by FELDs experiment allowed the verification of the self-guiding effect on the ferromagnetic probe and are reported in
Table 3. When the probe enters the electromagnet sphere of influence (SOI, about 10 cm for the FELDs configuration), there is a clear variation on its motion due to the magnetic force acting on it (
Figure 8, down). The working range of the self-guiding clearly depends from the probe geometry and the electromagnet power; scaling to operational conditions, the sphere of influence size can vary from about 20 cm (CubeSat-sized spacecraft) to up to 1 m (100 kg class satellites). The microgravity verification of the uncontrolled magnetic self-guide gave this technology a readiness level of 5.
2.5. Active Electromagnetic Proximity Operations
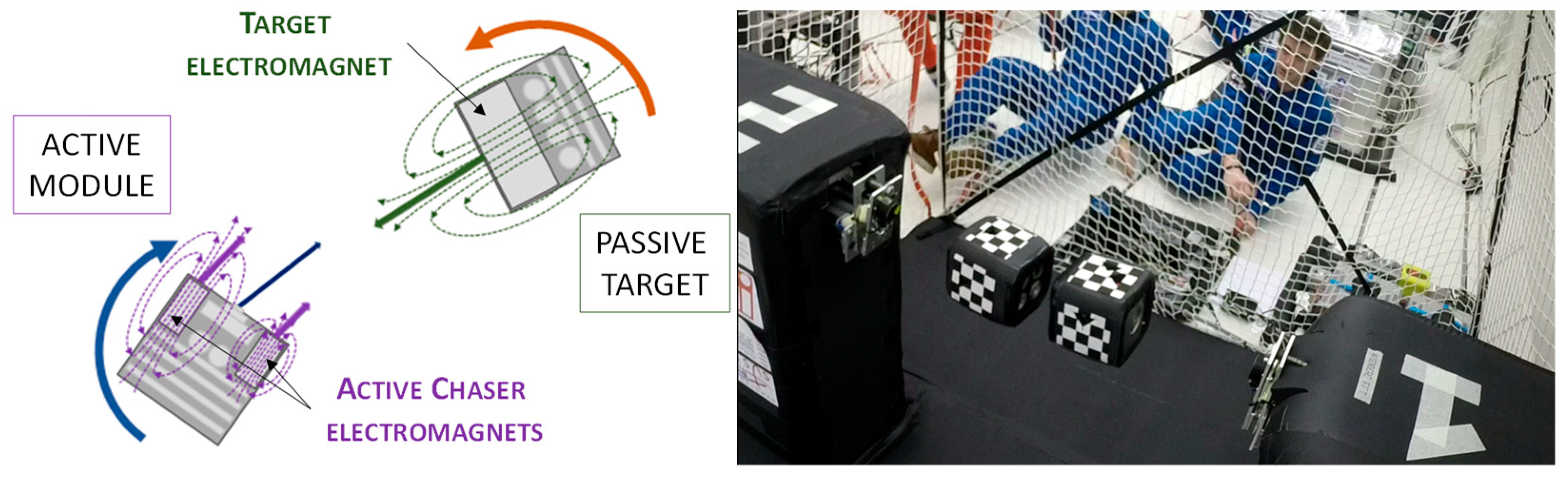
Instead of a passive probe, TED can employ a CubeSat-sized active element for proximity rendezvous, relative attitude control and soft docking. This will allow to increase the working range of electromagnetic operations while controlling the approach phase, further reducing the momentum transfer during mating. The complete assessment of active electromagnetic proximity operations, in the framework of PACMAN project, was performed during the test campaign of “Fly your Thesis! 2017” program [
28]. PACMAN consisted of two single-unit CubeSat sized modules equipped respectively with an active set of four electromagnets (peak power of 1.67 W each) and a passive one (14.4 W); dedicated localization sensors were also employed for their relative pose reconstruction. During the parabolic flights of December 2017, the two modules (
Figure 10) were launched and the active one maneuvered to align and perform soft docking. A closed-loop GNC system was designed to compute the desired control torques considering the relative position/attitude information the magnetic field model [
44]. Further details on the experiments are reported in [
45].
3. TED Space Demonstration
Once the critical technologies for TED are verified in relevant environment, the following step is an in-orbit demonstration, called TED-Sat with the following objectives:
Demonstrate a system for tether-controlled deployment and rewind in space.
Study the self-alignment and guiding effect of the electromagnetic interactions in space.
Evaluate the dynamics of the whole system during the probe-target impact phase.
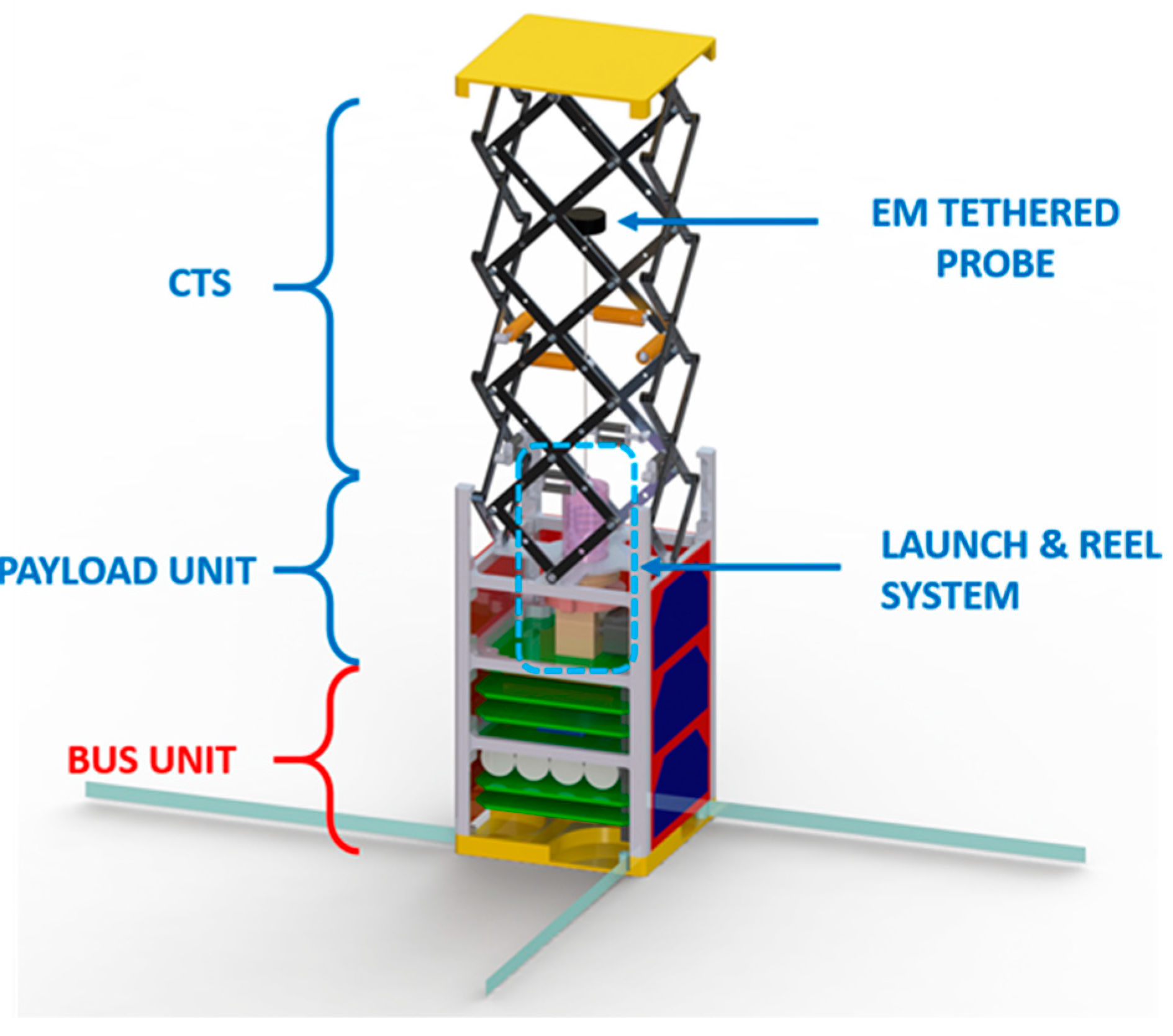
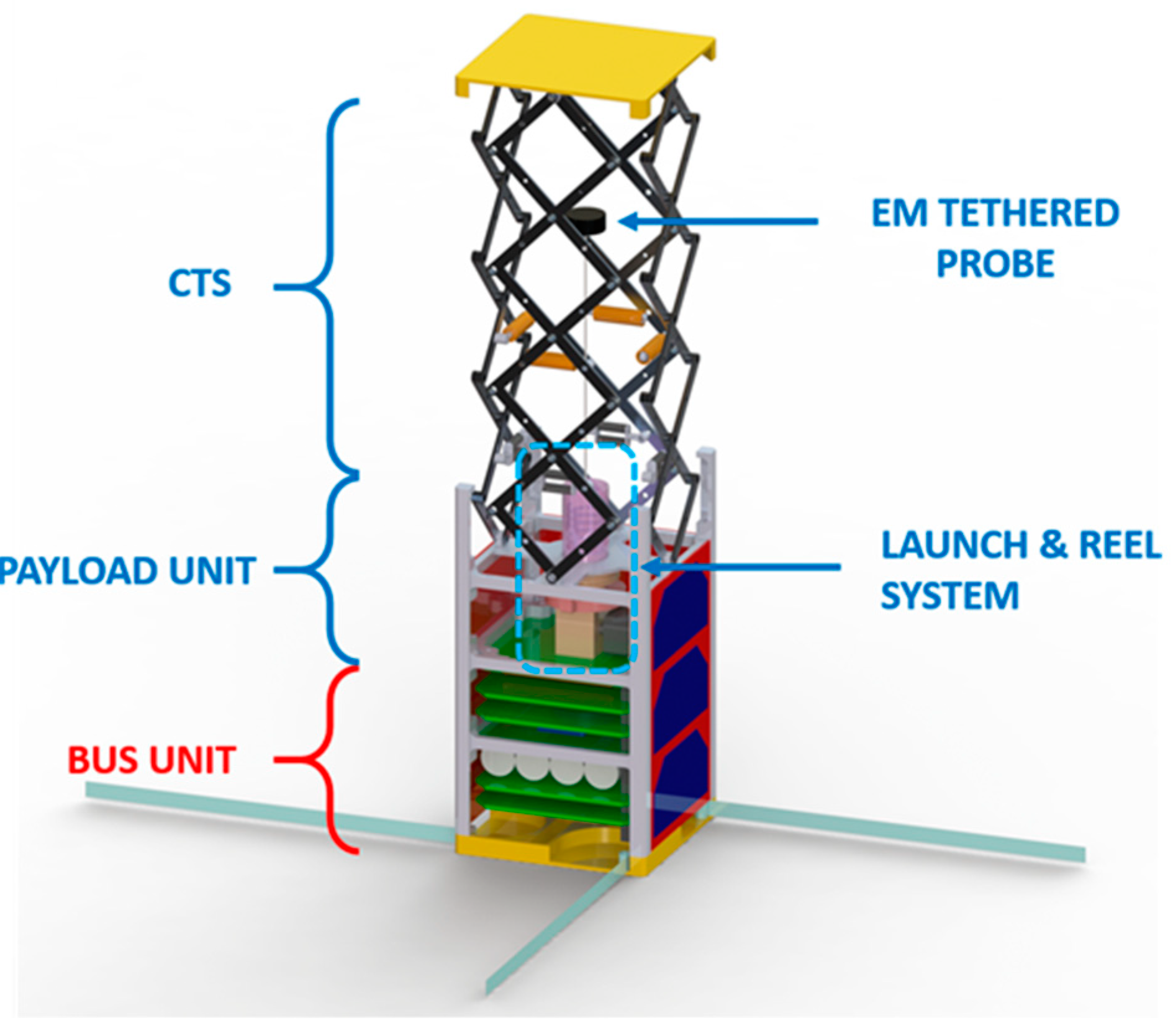
A preliminary spacecraft design has been done with the satellite consisting in a 2U CubeSat (
Figure 11) with deployable antennas and fixed solar panels on its external faces. One unit is dedicated to the satellite bus electronics, while the contains the experimental payload. The first one consists in standard off-the-shelf components, the latter is composed of (1) a deployable face (CubeSat Target Surface-CTS) acting as a target, (2) the Launch and Reel System (LRS), and (3) an electro-magnetic tethered probe.
For safety reasons, the CTS remains mechanically attached to the bus. This leads to relevant restrictions on the system design, in particular on the choice of the tether length. Clearly, the possibility of deploying a longer line (e.g., some meters) would relax the design requirements of the deployer subsystems, such as tether length measured accuracy, brake response time, launcher precision, etc. Nonetheless, these are merely technology problems that can be solved with a proper miniaturization work and will not affect the meaningfulness of a TED technology demonstration mission: under both mechanical and dynamical points of view, the deployment of few centimeters of tether entails exactly the same issues as the deployment of tens-of-meters of tether.
The TED-Sat expected operations are designed to satisfy the objectives previously mentioned. (1) After orbit insertion and attitude stabilization, the satellite deploys his upper face (CTS) outside the satellite bus to be used as target for the TED demonstration. (2) After that, the electromagnetic probe is launched and the tether deployment is controlled to reach the control volume for electromagnetic self-alignment and capture. (3) Finally, the CTS is retracted to its stored configuration and the TED experiment can be replicated to get sufficient data for a relevant statistical analysis.
3.1. Prospective Application: CubeTug
Once the TED-Sat demonstration mission is accomplished, the possible applications of TED will be innumerable. Among them, it is worth mentioning the possibility of using tethered systems for space tugging [
13,
46,
47,
48]: once the soft docking is achieved the chaser could maneuver to tug the target without completely rewind the tether. This will allow more stable dynamics during the propulsive phase with respect to hard-docking configurations, as demonstrated by Mantellato [
20]. In this contest, space tugging is the next technology to be developed in the framework of TED perspective applications. Therefore, directly correlated to TED-Sat, the CubeTug mission concept is under investigation [
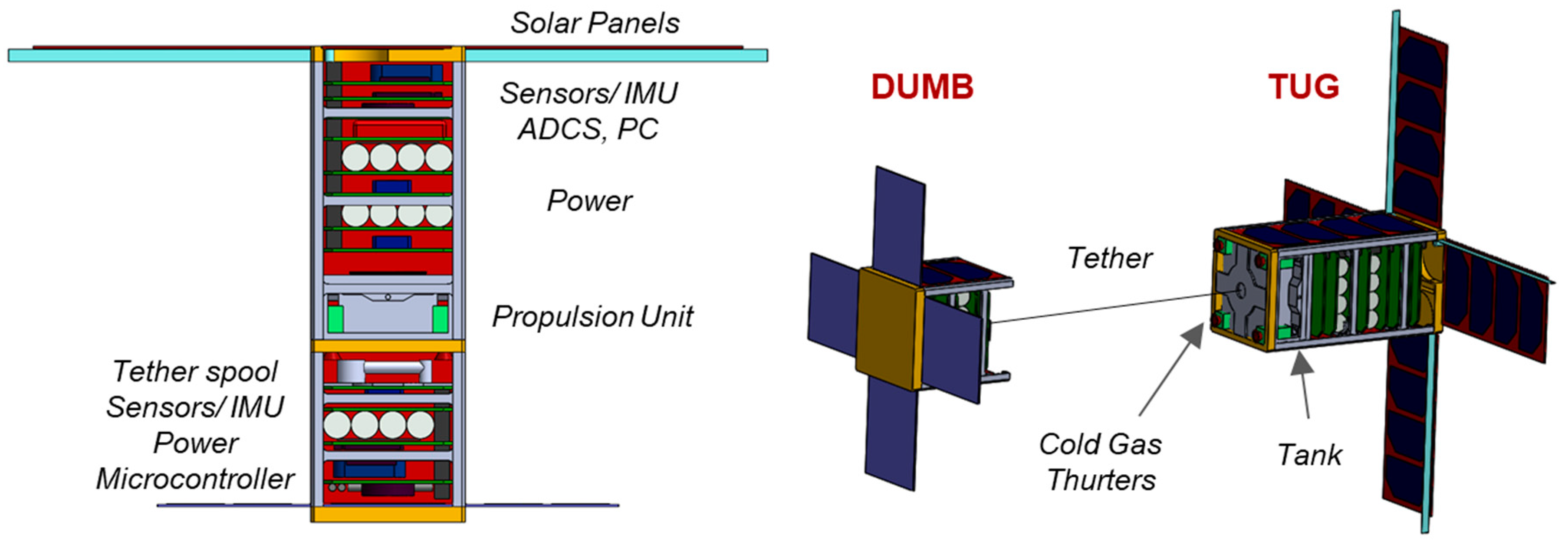
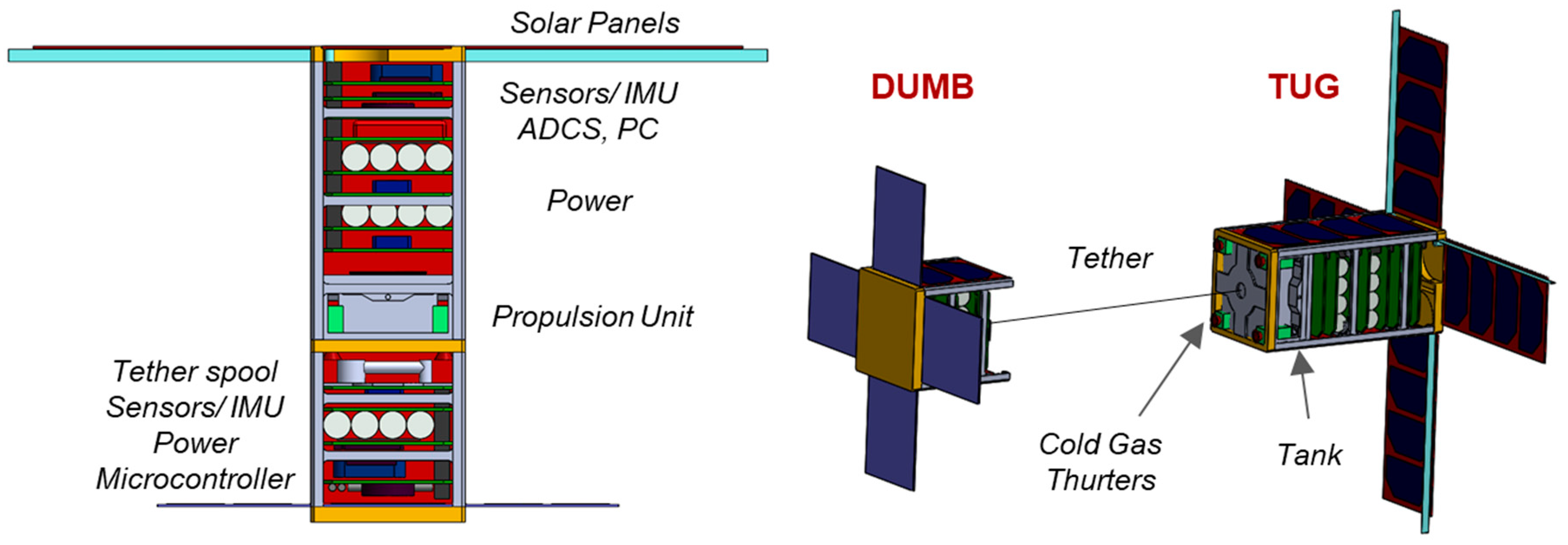
19], to demonstrate the feasibility of tethered space tug maneuvers and validate all key technologies, such as tether deployer, tether dynamic instabilities countermeasures, chaser ACDS subsystem, and propulsion system for the re-entry maneuver. In
Figure 12, the preliminary design of CubeTug is reported: it is designed as a 3U CubeSat composed by two separable units: the TUG and the DUMB, respectively of 2U and 1U of size. The TUG is the main satellite, and contains the on-board computer with a telecommunication board, a complete Attitude Determination and Control System (ADCS) suite, a power management system, and a cold gas propulsion module. The DUMB presents a simpler design, containing only the attitude determination system, a smaller power system, a COTS microcontroller, and a tether deployment system where the tether is also stored before mission operations.
The TUG and the DUMB are launched as a single body and remain connected for all the orbital insertion and attitude stabilization phases. The CubeTug structure is the only common element, as the TUG and the DUMB will have completely independent subsystems. After separation, the two parts remain connected just by the tether. The DUMB does not control its attitude, and is subjected to forces and torques transmitted by means of the tether; the TUG is actuated to perform the space tugging maneuver.
3.2. Prospective Application: Asteroid-Debris Capture
Another potential application of TED technologies (and in particular of the tether deployment and retrieval system) is proposed for uncontrolled bodies capture. In fact, in the wider framework of uncooperative bodies capture and orbital maneuvering, tethered systems have been recently proposed as a concurrent solution to robotic arms, due to the different behavior of flexible links with respect to rigid interfaces.
With respect to tethered capture, a multi-body approach has been recently proposed by the authors [
49,
50], consisting in a multi-body chaser composed of several nodes that can be deployed in a tethered ring configuration (
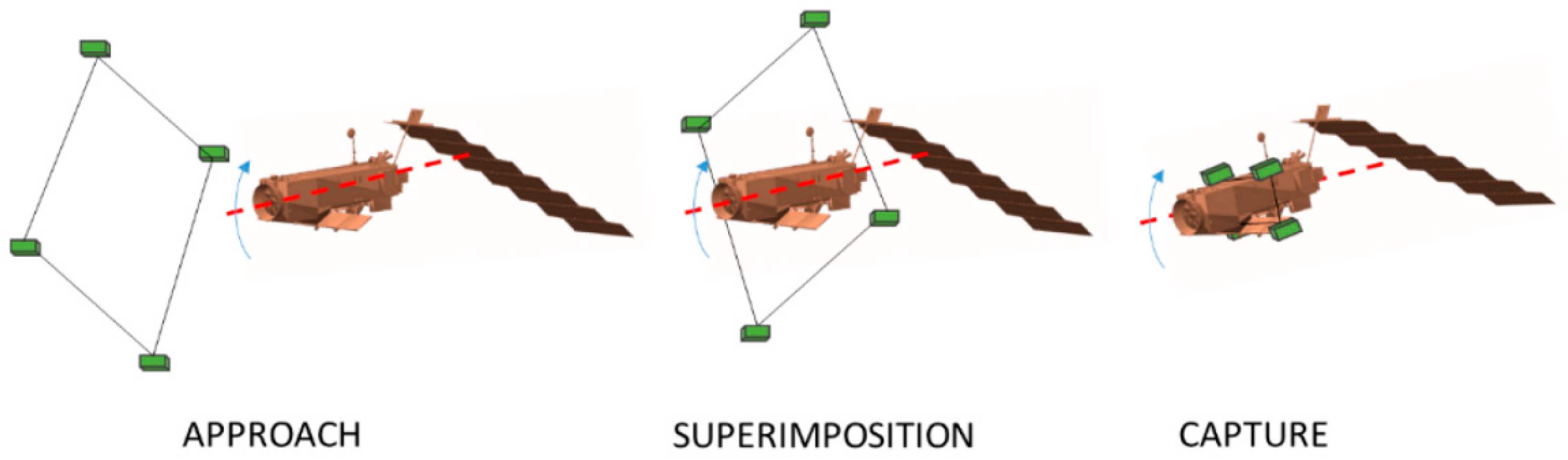
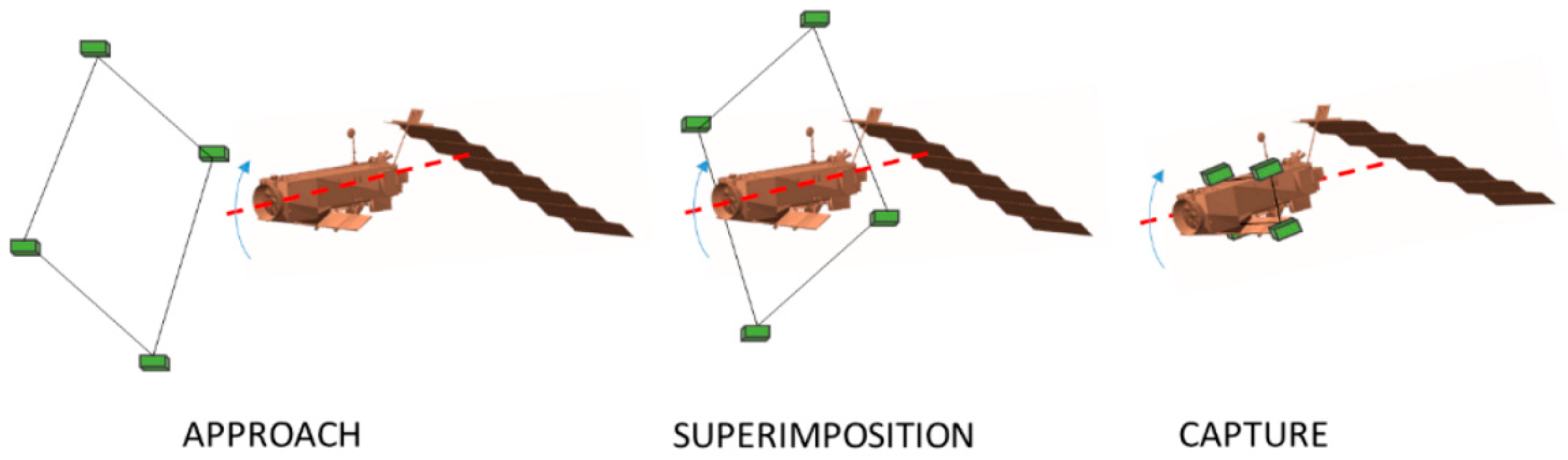
Figure 13): a spinning circular shape allows for the center of mass of the spacecraft to be in empty space, the tethers enable a variable radius ring, which can be used to approach and capture an object of interest. This method conveniently places the spacecraft on the equatorial plane of the target, where using a gimbaled engine they can control the ring trajectory. For spinning objects with limited tumbling rates, careful control of the rings radius allows for contact at zero relative speed. The zero-net force distribution guaranteed by the ring configuration reduces damages to the target body. Mechanical connection is guaranteed by the tension in the tethers, and the whole maneuver can be accomplished at a speed that best suits the mission.
4. Scientific and Educational Outcomes
The cornerstone of TED development is its educational framework: the whole project has been based on the participation of a student team, dedicated to the verification in relevant environment of the critical technologies. To date, the three teams have been composed mostly by Aerospace Engineering students; only about 40% of the members came form from the Information Engineering field, generally recruited after the FELDs, STAR, and PACMAN teams were selected by ESA Education Office.
4.1. Scientific Production
In addition to the design and experimental activities, the student teams dedicated time and resources to results presentation and dissemination. Up to date, the scientific production consists in 12 conference papers, 1 paper published in a scientific journal, 1 patent (STAR deployer), and about 10 presentations to the public. FELDs and STAR papers at the 66th and 68th International Astronautical Congresses were awarded with the “Hans Von Moldau best student team paper” award, indicating the quality of the proposed work.
4.2. Students Survey
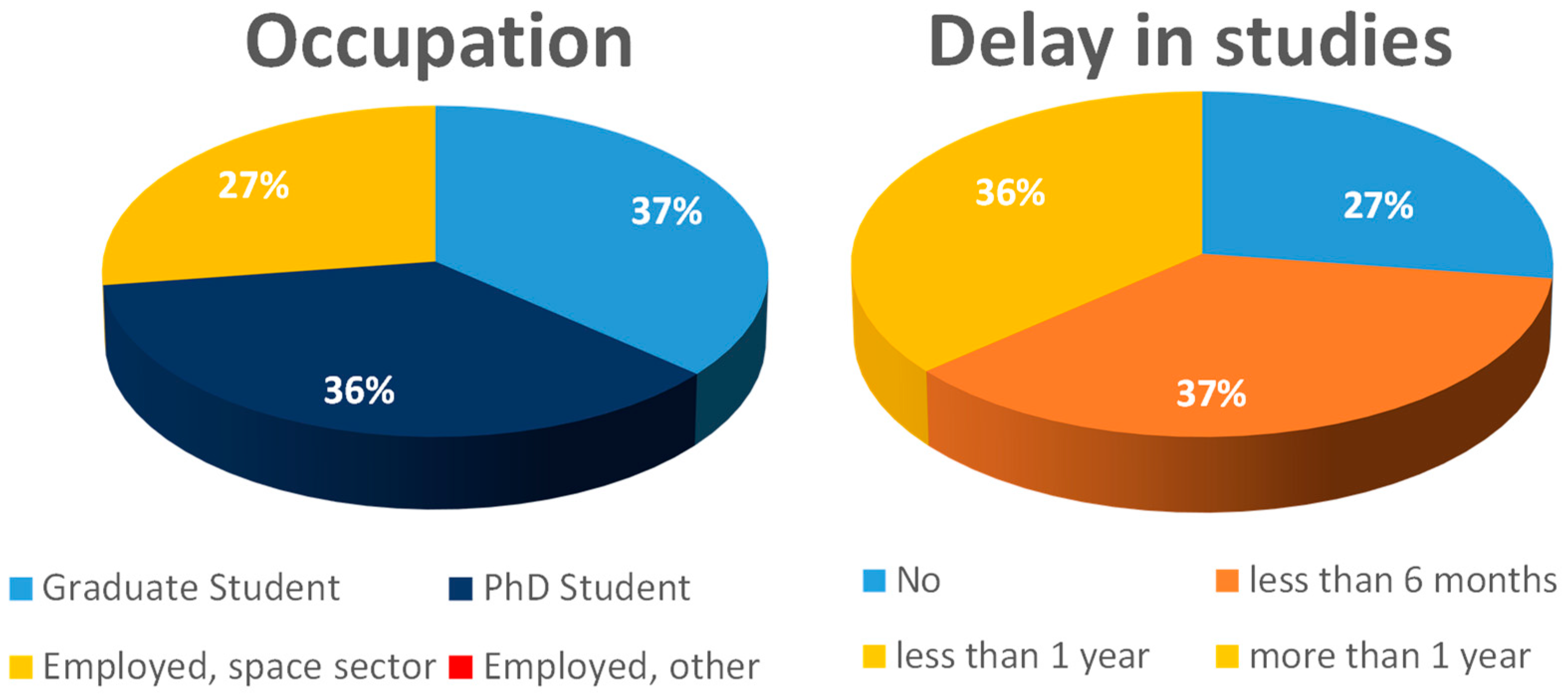
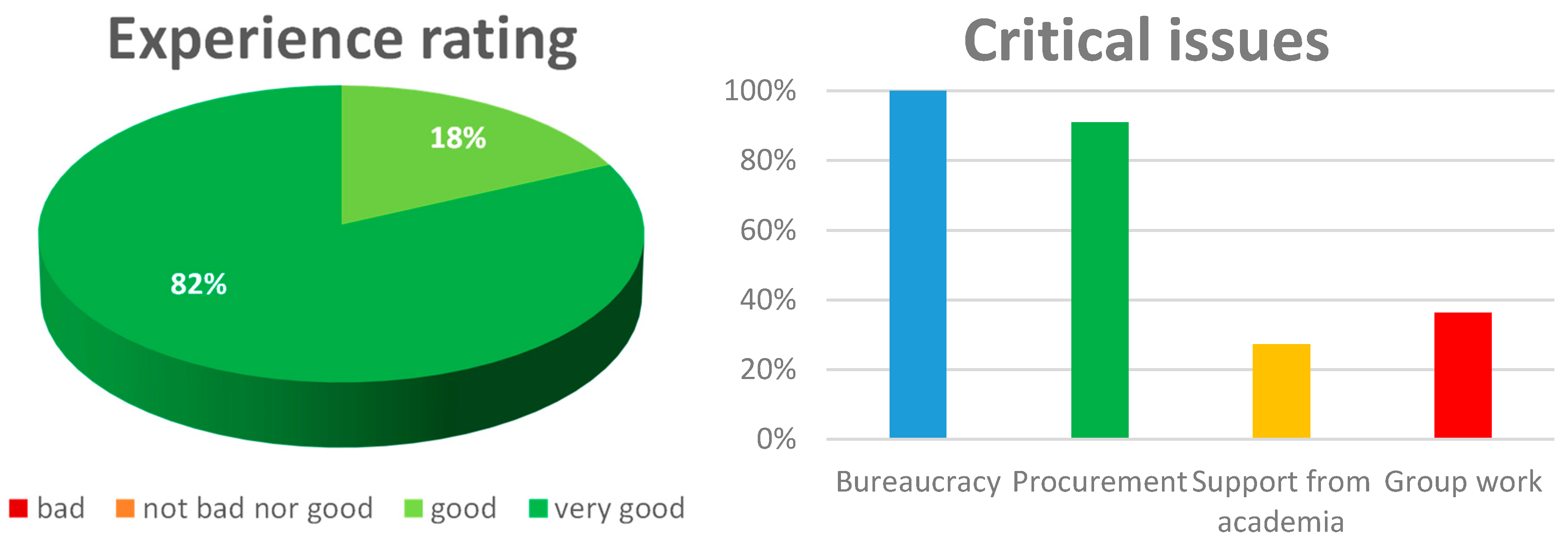
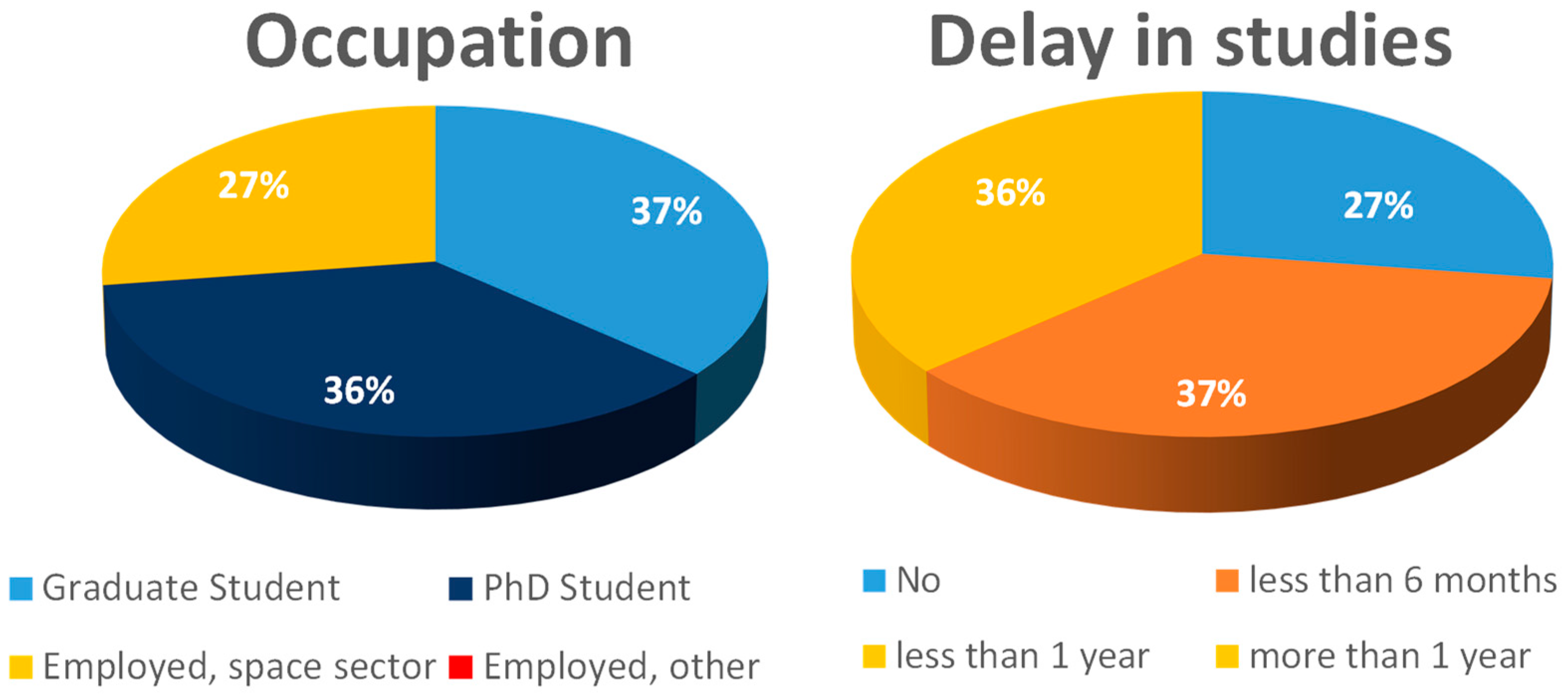
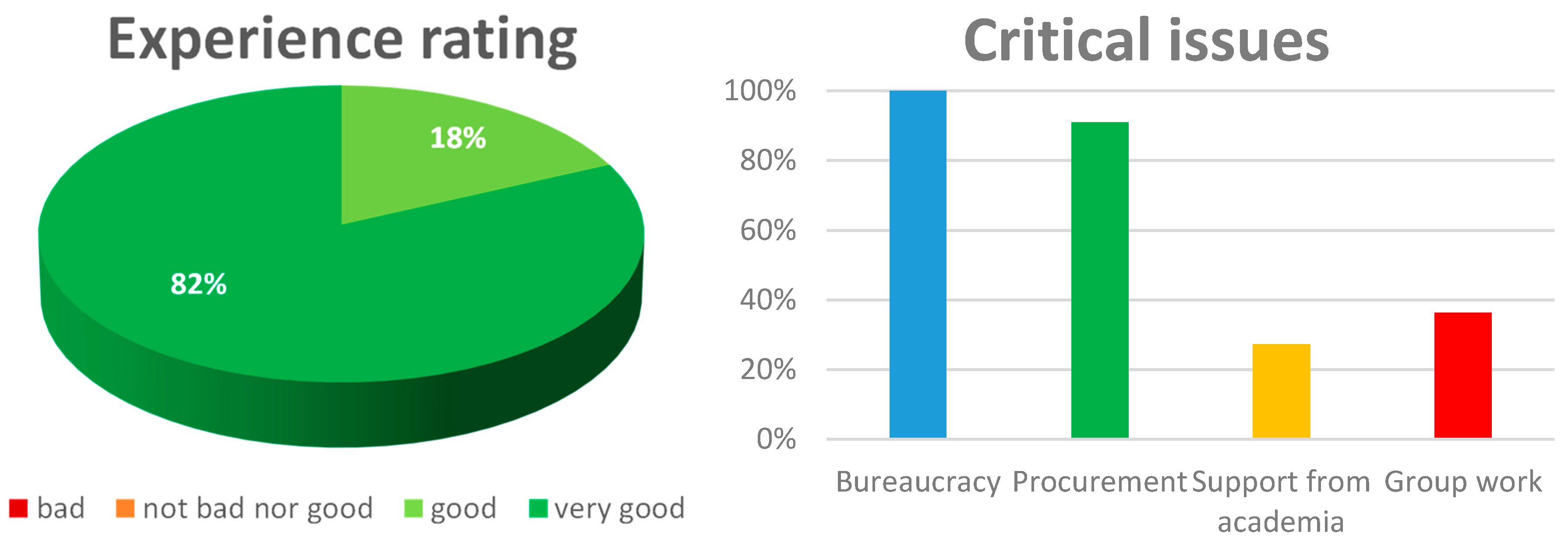
A survey was submitted to the students involved in TED, to assess the status, satisfaction and key issues of the project. The main results are reported in
Figure 14. In particular it can be noted that students’ satisfaction is really high, oscillating between good (20%) and very good (80%). The participation to the experiments caused delays in studies always lower than 1 year. Among the critical issues the students dealt with, the bureaucracy and the procurement were the most incisive.
5. Conclusions
This paper presented the development plan for the Tethered Electromagnetic Docking system. The innovative mating system uses a tethered magnetic probe that is able to self-align and soft dock with a target interface. The proposed procedure implies (1) a reduction of chaser-to-target relative navigation and guidance requirements during rendezvous, (2) high propellant saving, and (3) a decrease of transmitted forces between the vehicles during docking.
Through test in the microgravity environment of ZARM drop tower in Bremen, the critical technologies of (1) the launch system, (2) the tether controlled deploy and retrieval, and (3) the uncontrolled magnetic self-guidance were proved, reaching Technology Readiness Levels respectively of 6, 6, and 5. Furthermore, (4) active electromagnetic self-guidance has been fully tested in relevant environment through the PACMAN experiment.
The three experiments involved in TED development had been performed by student teams in the framework of ESA Education Office programs. In addition to the scientific production, students gained experience in the design and realization of complex experiments, and acquired important and appreciated competences for both their academic and professional careers.
Author Contributions
Conceptualization, L.O., F.S., M.D., and A.F.; Writing—original draft preparation, L.O.; Writing—review and editing, F.S.; Project administration, A.F.
Funding
“This research received no external funding”; FELDs, STAR, and PACMAN experiments were realized in the framework of ESA Education Office “Drop Your Thesis!” and “Fly Your Thesis!” programs.
Acknowledgments
The authors would like to thank all the involved students for their commitment to TED activities, as well as all the sponsors supporting FELDs, STAR, and PACMAN experiments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Fehse, W.; Ankersen, F. Automated Rendezvous and Docking of Spacecraft; Cambridge University Press (CUP): Cambridge, UK, 2003. [Google Scholar]
- Olivieri, L.; Francesconi, A. Design and test of a semiandrogynous docking mechanism for small satellites. Acta Astronaut. 2016, 122, 219–230. [Google Scholar] [CrossRef]
- Miller, D.L. Development of Resource-Constrained Sensors and Actuators for in-Space Satellite Docking and Servicing. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2015. [Google Scholar]
- Sansone, F.; Francesconi, A.; Olivieri, L.; Branz, F. Proximity relative navigation sensors for small-scale spacecraft and drones. In Proceedings of the 66th IAC, Jerusalem, Israel, 12–16 October 2015. [Google Scholar]
- Sansone, F.; Branz, F.; Francesconi, A. A relative navigation sensor for CubeSats based on LED fiducial markers. Acta Astronaut. 2018, 146, 206–215. [Google Scholar] [CrossRef]
- Ulrich, S.; Hayhurst, D.L.; Otero, A.S.; Miller, D.; Barkana, I. Simple Adaptive Control for Spacecraft Proximity Operations. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar]
- Murchison, L.S.; Martinez, A.; Petro, A. On-Orbit Autonomous Assembly from Nanosatellite. Available online: https://ntrs.nasa.gov/search.jsp?R=20150021838 (accessed on 16 June 2015.).
- Bowen, J.; Villa, M.; Williams, A. CubeSat based Rendezvous, Proximity Operations, and Docking in the CPOD Mission. In Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 8–13 August 2015. [Google Scholar]
- Shan, M.; Guo, J.; Gill, E. Review and comparison of active space debris capturing and removal methods. Prog. Aerosp. Sci. 2016, 80, 18–32. [Google Scholar] [CrossRef]
- Reiner, M.; Fernandez, J.G.; Ortega, G. Combined control for active debris removal using a satellite equipped with a robot arm. In Proceedings of the 10th ESA GNC Conference, Salzburg, Austria, 29 May–3 June 2017. [Google Scholar]
- Yilmaz, O.; Aouf, N.; Majewski, L.; Sanchez-Gestido, M.; Ortega, G. Using infrared-based relative navigation for active debris removal. In Proceedings of the 10th ESA GNC Conference, Salzburg, Austria, 29 May–3 June 2017. [Google Scholar]
- Benvenuto, R.; Lavagna, M. Flexible capture devices for medium to large debris active removal: Simulations results to drive experiments. In Proceedings of the 12th ASTRA Conference, Noordwijk, The Netherlands, 15–17 May 2013. [Google Scholar]
- Benvenuto, R.; Lavagna, M. Towing tethers to control debris removal dynamics. In Proceedings of the 65th IAC, Toronto, ON, Canada, 29 September–3 October 2014. [Google Scholar]
- Benvenuto, R.; Salvi, S.; Lavagna, M. Dynamics analysis and GNC design of flexible systems for space debris active removal. Acta Astronaut. 2015, 110, 247–265. [Google Scholar] [CrossRef]
- Medina, A.; Cercós, L.; Stefanescu, R.M.; Benvenuto, R.; Pesce, V.; Marcon, M.; Lavagna, M.; González, I.; López, N.R.; Wormnes, K. Validation results of satellite mock-up capturing experiment using nets. Acta Astronaut. 2017, 134, 314–332. [Google Scholar] [CrossRef]
- Bellanca, A.; Pesce, V.; Lunghi, P.; Lavagna, M. Wave based control analysis and experimental validation for reliable space transportation applications. In Proceedings of the 10th ESA GNC, Salzburg, Austria, 29 May–3 June 2017. [Google Scholar]
- Duzzi, M.; Riccardo, M.; Lorenzo, O. Spacecraft joining using a tethered electromagnetic probe. In Proceedings of the 67th IAC, Guadalajara, Mexico, 26–30 September 2016. [Google Scholar]
- Duzzi, M.; Olivieri, L.; Francesconi, A. Tether-aided spacecraft docking procedure. In Proceedings of the ESA 4S Symposium, La Valletta, Malta, 30 May–3 June 2016. [Google Scholar]
- Olivieri, L.; Antonello, A.; Bettiol, L.; Branz, F.; Duzzi, M.; Feltrin, F. CubeTug: A tethered space tug concept demonstration for active debris removal missions. In Proceedings of the 10th ESA GNC, Salzburg, Austria, 29 May–3 June 2017. [Google Scholar]
- Mantellato, R.; Olivieri, L.; Lorenzini, E. Study of dynamical stability of tethered systems during space tug maneuvers. Acta Astronaut. 2017, 138, 559–569. [Google Scholar] [CrossRef]
- Foust, R.C.; Nakka, Y.K.; Saxena, A.; Chung, S.J.; Hadaegh, F.Y. Automated Rendezvous and Docking Using Tethered Formation Flight. In Proceedings of the 9th International Workshop on Satellite Constellations and Formation Flying, Bulder, CO, USA, 19–21 June 2017. [Google Scholar]
- Sanmartín Losada, J.R.; Charro, M.; Lorenzini, E.C.; Colombatti, G.; Roussel, J.F.; Serrath, P. BETs: Propellant less de orbiting of space debris by bare electrodynamic tethers. In Let’s Embrace Space; Publications Office of the European Union: Luxembourg, 2012; Volume II. [Google Scholar]
- Guglielmo, D.; Omar, S.; Bevilacqua, R.; Fineberg, L.; Treptow, J.; Poffenberger, B.; Johnson, Y. Drag Deorbit Device: A New Standard Reentry Actuator for CubeSats. J. Spacecr. Rocket. 2018, 56, 129–145. [Google Scholar] [CrossRef]
- Petrillo, D.; Buonomo, M.; Cavinato, A.; Chiariotti, F.; Gaino, M.; Branz, F. Flexible Electromagnetic Leash Docking system (FELDs) experiment from design to microgravity testing. In Proceedings of the 66th IAC, Jerusalem, Israel, 12–16 October 2015. [Google Scholar]
- Grassi, G.; Gloder, A.; Pellegrina, L.; Pezzato, M.; Rossi, A.; Branz, F. An innovative space tether deployer with retrieval capability: Design and test of star experiment. In Proceedings of the 68th IAC, Adelaide, Australia, 25–29 September 2017. [Google Scholar]
- Callens, N.; Ventura-Traveset, J.; de Lophem, T.L.; de Echazarreta, C.L. ESA parabolic flights, drop tower and centrifuge opportunities for university students. Microgravity Sci. Technol. 2011, 23, 181–189. [Google Scholar] [CrossRef]
- Dittus, H. Drop tower ‘bremen’: A weightlessness laboratory on earth. Endeavour 1991, 15, 72–78. [Google Scholar] [CrossRef]
- Duzzi, M. PACMAN Experiment: A Parabolic Flight Campaign Student Experience, 2nd ed.; SSEA: Budapest, Hungary, 2018. [Google Scholar]
- Cosmo, M.L.; Lorenzini, E.C. Tethers in Space Handbook; NASA: Washington, DC, USA, 1997.
- Gaino, M. Magnetic Attraction in Microgravity. FELDs Experiment from Simulations to Data Analysis. Master’s Thesis, University of Padua, Padova, Italy, 2017. [Google Scholar]
- Petrillo, D.; Gaino, M.; Duzzi, M.; Grassi, G.; Francesconi, A. FELDs Experiment: A new flexible soft docking concept. In Proceedings of the 1st Symposium on Space Educational Activities, Padua, Italy, 9–12 December 2015. [Google Scholar]
- Petrillo, D.; Gaino, M.; Duzzi, M.; Grassi, G.; Francesconi, A. Tethered docking systems: Advances from FELDs Experiment. In Proceedings of the 67th International Astronautical Congress, Jerusalem, Israel, 12–16 October 2015. [Google Scholar]
- Grassi, G. A novel concept of space tether deployer with retrieval capability. Master’s Thesis, University of Padua, Padova, Italy, 2017. [Google Scholar]
- Dobrowolny, M.; Stone, N.H. A technical overview of TSS-1: The first Tethered-Satellite system mission. Il Nuovo Cimento C 1994, 17, 1–12. [Google Scholar] [CrossRef]
- Lorenzini, E.C.; Bortolami, S.B.; Rupp, C.; Angrilli, F. Control and Flight Performance of Tethered Satellite Small Expendable Deployment System-II. J. Guid. Control Dyn. 1996, 19, 1148–1156. [Google Scholar] [CrossRef]
- Carroll, A.J. SEDS Deployer Design and Flight Performance. In Proceedings of the AIAA Space Programs and Technologies Conference and Exhibit, Huntsville, AL, USA, 21–23 September 1993. [Google Scholar]
- Beck, J.; van Hauwaert, P.; Hobbs, S.; Evans, D.; Robinson, F.; Holbrough, I.; Virgili, J. Bodies under Connected Elastic Dynamics: A Theoretically Rounded Assessment of Elastic Tether Dynamics for Active Debris Removal Missions. Technical Report, ESA Express Procurement EXPRO, Ref. No. 14.197.05 (2014). Available online: https://www.researchgate.net/publication/295255274_Bodies_under_Connected_Elastic_Dynamics_A_Theoretically_Grounded_Assessment_of_Elastic_Tether_Dynamics_for_Active_Debris_Removal_Missions (accessed on 29 March 2019).
- Mantellato, R.; Lorenzini, E.C.; Sternberg, D.; Roascio, D.; Saenz-Otero, A.; Zachrau, H.J. Simulation of a Tethered Microgravity Robot Pair and Validation on a Planar Air Bearing. In Proceedings of the 5th International Conference on Tethers in Space, Ann Harbor, MI, USA, 24–26 May 2016. [Google Scholar]
- Grassi, G.; Pezzato, M.; Gloder, A.; Mantellato, R.; Francesconi, A.; Lorenzini, E.; Rossi, A.; Pellegrina, L. Design and test in microgravity of a space tether length and length rate measurement device. In Proceedings of the 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Padova, Italy, 21–23 June 2017. [Google Scholar]
- Attaway, S.W. The Mechanics of Friction in Rope Rescue. Int. Tech. Rescue Symp. 1999, 5, 1–16. [Google Scholar]
- Pellegrina, L.; Grassi, G.; Rossi, A.; Gloder, A.; Pezzato, M. Space Tether Automatic Retrieval (STAR), Drop Your Thesis! 2016; Final Report; European Space Agency Education Office, European Space Research and Technology Centre: Noordwijk, The Netherlands, 2017. [Google Scholar]
- Porter, A.K.; Alinger, D.J.; Sedwick, R.J.; Merk, J.; Opperman, R.A.; Buck, A.; Eslinger, G.; Fisher, P.; Miller, D.W.; Bou, E. Demonstration of electromagnetic formation flight and wireless power transfer. J. Spacecr. Rocket. 2014, 51, 1914–1923. [Google Scholar] [CrossRef]
- Underwood, C.; Pellegrino, S.; Lappas, V.J.; Bridges, C.P.; Baker, J. Using CubeSat/micro-satellite technology to demonstrate the Autonomous Assembly of a Reconfigurable Space Telescope (AAReST). Acta Astronaut. 2015, 114, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Duzzi, M.; Casagrande, R.; Mazzucato, M.; Trevisi, F.; Vitellino, F.; Vitturi, M.; Cenedese, A.; Francesconi, A. Electromagnetic position and attitude control for PACMAN experiment. In Proceedings of the 10th International ESA Conference on Guidance, Navigation & Control Systems, Salzburg, Austria, 29 May–3 June 2017. [Google Scholar]
- Duzzi, M. Spacecraft Rendezvous and Docking Using Electromagnetic Interactions. Ph.D. Thesis, University of Padova, Padova, Italy, 2018. [Google Scholar]
- Aslanov, V.; Yudintsev, V. Dynamics of large space debris removal using tethered space tug. Acta Astronaut. 2013, 91, 149–156. [Google Scholar] [CrossRef]
- Aslanov, V.S.; Yudintsev, V.V. Dynamics of Large Debris Connected to Space Tug by a Tether. J. Guid. Control. Dyn. 2013, 36, 1654–1660. [Google Scholar] [CrossRef]
- Jasper, L.E.; Seubert, C.R.; Schaub, H.; Trushkyakov, V.; Yutkin, E. Tethered tug for large low earth orbit debris removal. In Proceedings of the AAS/AIAA Astrodynamics Specialists Conference Astrodynamic Conference, Charleston, SC, USA, 29 January–2 February 2012. [Google Scholar]
- Feltrin, F.; Bettiol, L.; Olivieri, L.; Francesconi, A. Multibody tether concept for asteroids capture. In Proceedings of the 68th IAC, Adelaide, Australia, 25–29 September 2017. [Google Scholar]
- Olivieri, L.; Feltrin, F.; Valmorbida, A.; Lorenini, E.C.; Francesconi, A. Enabling ENVISAT deorbiting: A multi-spacecraft mission for inspection, capture, and detumbling. In Proceedings of the 4S Symposium 2018, Sorrento, Italy, 28 May–1 June 2018. [Google Scholar]
Figure 1.
Tethered Electromagnetic Docking procedure concept.
Figure 1.
Tethered Electromagnetic Docking procedure concept.
Figure 2.
Tethered Electromagnetic Docking development plan, with technologies verification and the expected in-space demonstration.
Figure 2.
Tethered Electromagnetic Docking development plan, with technologies verification and the expected in-space demonstration.
Figure 3.
Working principle of the launch system. (1) After tether release, (2) the plate is pushed by the spring driving the probe, (3) until it reaches the linear guides end.
Figure 3.
Working principle of the launch system. (1) After tether release, (2) the plate is pushed by the spring driving the probe, (3) until it reaches the linear guides end.
Figure 4.
Spring-based launch system as developed by FELDs experiment. Note the lateral position of the release system.
Figure 4.
Spring-based launch system as developed by FELDs experiment. Note the lateral position of the release system.
Figure 5.
STAR launch system; the upgraded mechanism, with electromagnets for release (up); STAR launch system during a drop test (down). From left to right, the tethered probe before release, the launch phase, and the probe after separation from the plate.
Figure 5.
STAR launch system; the upgraded mechanism, with electromagnets for release (up); STAR launch system during a drop test (down). From left to right, the tethered probe before release, the launch phase, and the probe after separation from the plate.
Figure 6.
TED proposed tether controlled deploy and retrieval system schematics.
Figure 6.
TED proposed tether controlled deploy and retrieval system schematics.
Figure 7.
STAR brake mechanism, based on two non-rotating cylinders (in blue) controlled by a dedicated actuator. On the left, when the brake is not activated, the tether (orange) can unfold without restrictions; on the right, by rotating the actuator the friction between cylinders and tether brakes the deployment.
Figure 7.
STAR brake mechanism, based on two non-rotating cylinders (in blue) controlled by a dedicated actuator. On the left, when the brake is not activated, the tether (orange) can unfold without restrictions; on the right, by rotating the actuator the friction between cylinders and tether brakes the deployment.
Figure 8.
Top: STAR configuration (left) and frames from a drop test video (right). Bottom: test 5 probe trajectory data.
Figure 8.
Top: STAR configuration (left) and frames from a drop test video (right). Bottom: test 5 probe trajectory data.
Figure 9.
Top: simplified investigated scenario for evaluating the self-guiding effect on TED probe (left) and its test by the FELDs experiment (right). Bottom: probe vertical trajectory plot for the three successful tests. The variation of probe motion as it enters the electromagnet sphere of influence is clearly recognizable.
Figure 9.
Top: simplified investigated scenario for evaluating the self-guiding effect on TED probe (left) and its test by the FELDs experiment (right). Bottom: probe vertical trajectory plot for the three successful tests. The variation of probe motion as it enters the electromagnet sphere of influence is clearly recognizable.
Figure 10.
PACMAN working principle (left) and test in microgravity (right). The two modules are free to float during the low-gravity parabolas, and the active module maneuver to rendezvous, align, and soft dock with the passive target.
Figure 10.
PACMAN working principle (left) and test in microgravity (right). The two modules are free to float during the low-gravity parabolas, and the active module maneuver to rendezvous, align, and soft dock with the passive target.
Figure 11.
Preliminary design of the TED-Sat 2U technology demonstrator.
Figure 11.
Preliminary design of the TED-Sat 2U technology demonstrator.
Figure 12.
CubeTug layout in closed (left) and deployed (right) configurations.
Figure 12.
CubeTug layout in closed (left) and deployed (right) configurations.
Figure 13.
Proposed uncontrolled body capture maneuver: the tether ring system is able to superimpose its center of mass to the target one and capture it by closing around.
Figure 13.
Proposed uncontrolled body capture maneuver: the tether ring system is able to superimpose its center of mass to the target one and capture it by closing around.
Figure 14.
From top-left, clockwise: students’ occupation after the experiments, delay in studies due to the activity, critical issues, and satisfaction from the experience.
Figure 14.
From top-left, clockwise: students’ occupation after the experiments, delay in studies due to the activity, critical issues, and satisfaction from the experience.
Table 1.
FELDs launch system experiments conditions.
Table 1.
FELDs launch system experiments conditions.
| TEST # | Microgravity Phase | Probe Launch Velocity | Free-Flight Distance | Estimated Friction | Notes |
|---|
| 1 | 4.9 s | 0.23 m/s | 34 cm | 0.009 N | Successful |
| 2 | 4.9 s | 0.14 m/s | 34 cm | 0.005 N | Successful |
| 3 | 4.9 s | 0.14 m/s | 34 cm | 0.002 N | Successful |
| 4 | 4.9 s | 0.14 m/s | 34 cm | / | Failed release |
| 5 | 4.9 s | 0.14 m/s | 41cm | / | Failed release |
Table 2.
STAR experiment results.
Table 2.
STAR experiment results.
| TEST # | Microgravity Phase | Probe Launch | Deployment | Retrieval |
|---|
| 1 | 9.8 s | 1 s late | bounce-back | nominal |
| 2 | 9.8 s | 1 s late | nominal | nominal |
| 3 | 9.8 s | slow | nominal | nominal |
| 4 | 9.8 s | nominal | control error | nominal |
| 5 | 9.8 s | nominal | bounce-back | nominal |
Table 3.
FELDs drops 1–3 experiment data.
Table 3.
FELDs drops 1–3 experiment data.
| TEST # | Velocity @SOI | SOI Diameter | Probe Mass | Electromagnet Power | Peak Contact Force |
|---|
| 1 | 0.21 m/s | 10 cm | 200 g | 24 W | 3 N |
| 2 | 0.13 m/s | 10 cm | 200 g | 24 W | 2 N |
| 3 | 0.14 m/s | 10 cm | 200 g | 24 W | 2 N |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}