Process Development for Integrated and Distributed Rotorcraft Design


Abstract
:
1. Introduction
1.1. Background
1.2. Motivation
1.3. State of the Art
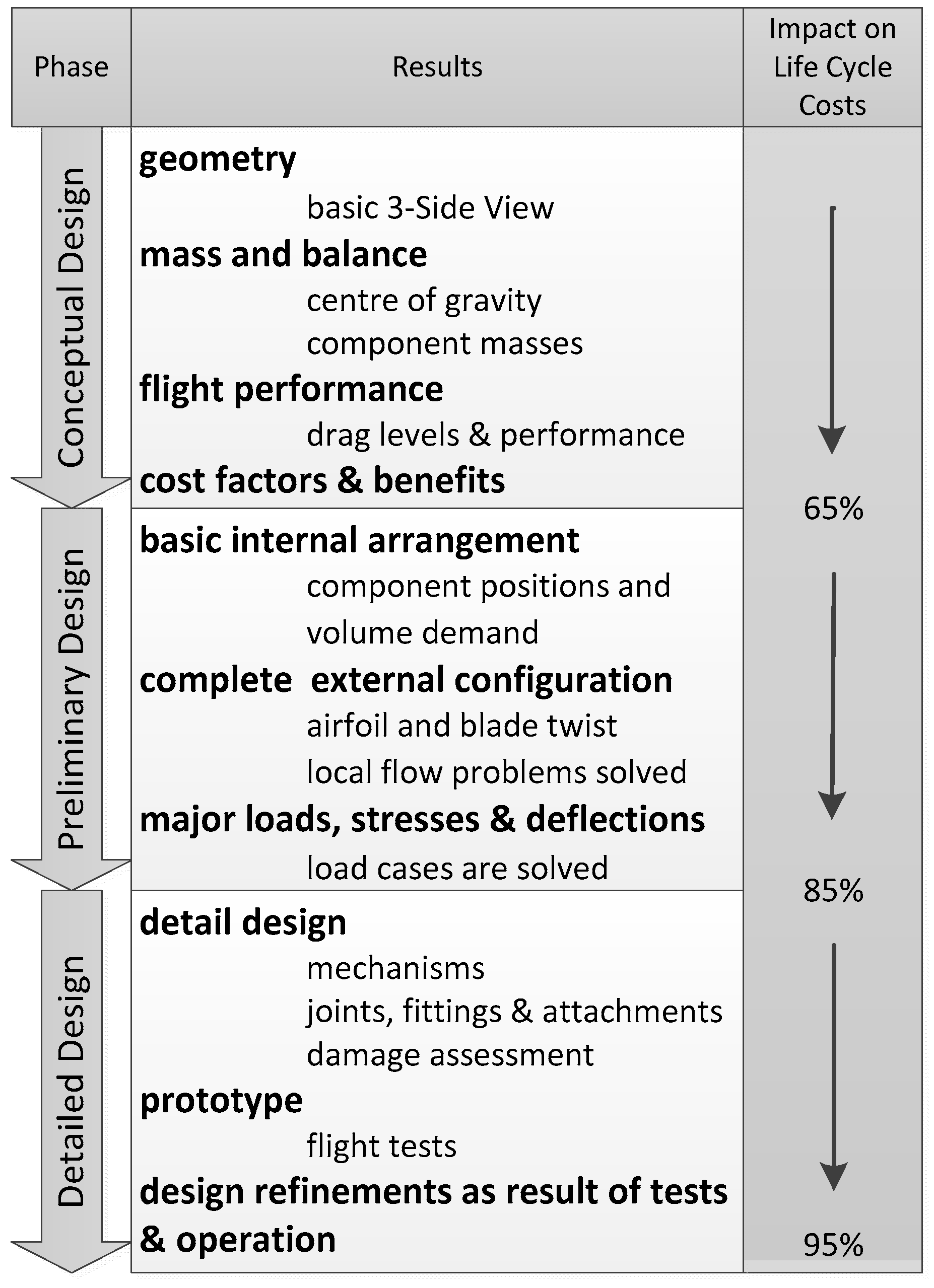
1.4. Design Theory
2. Design Environment
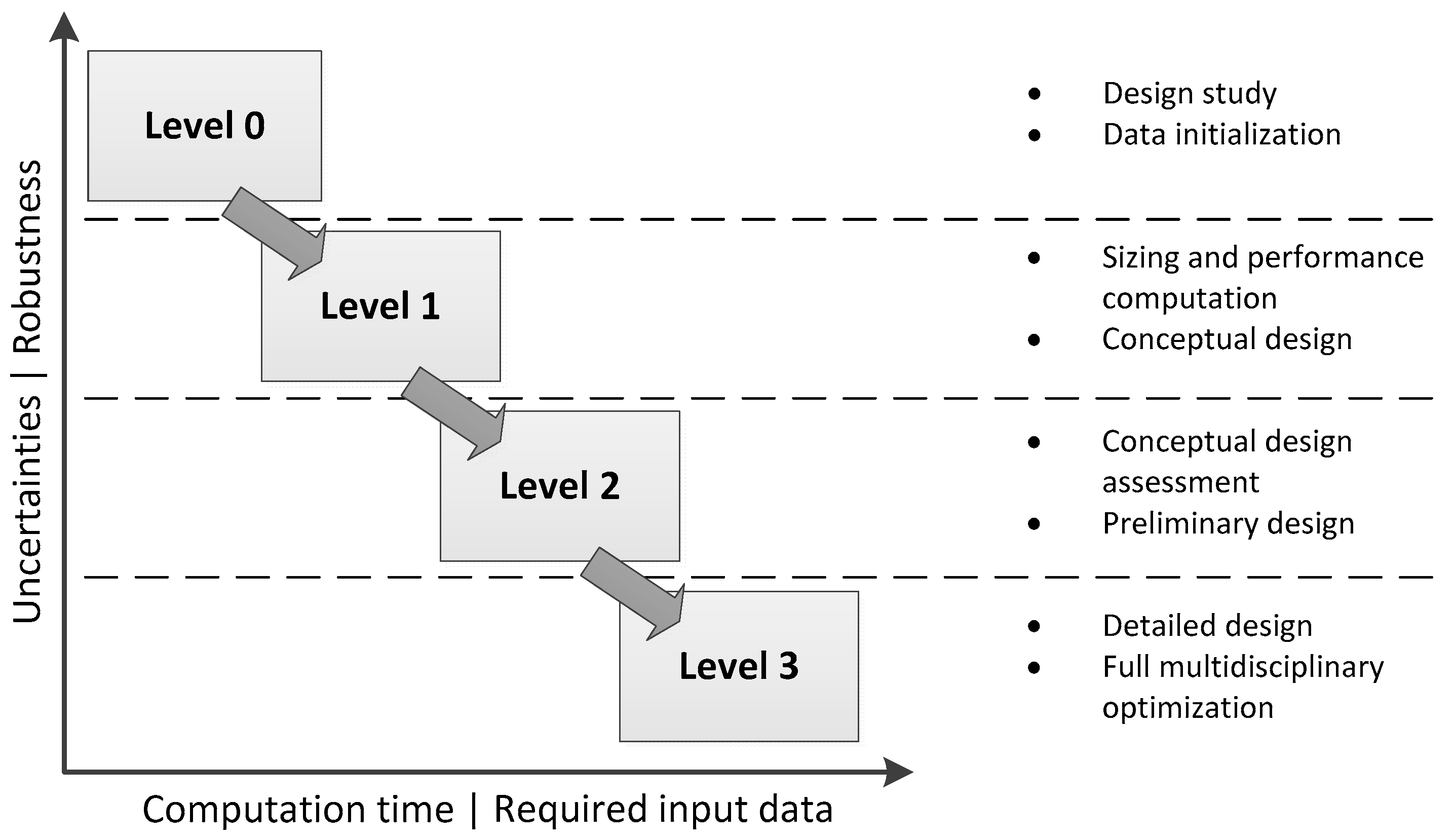
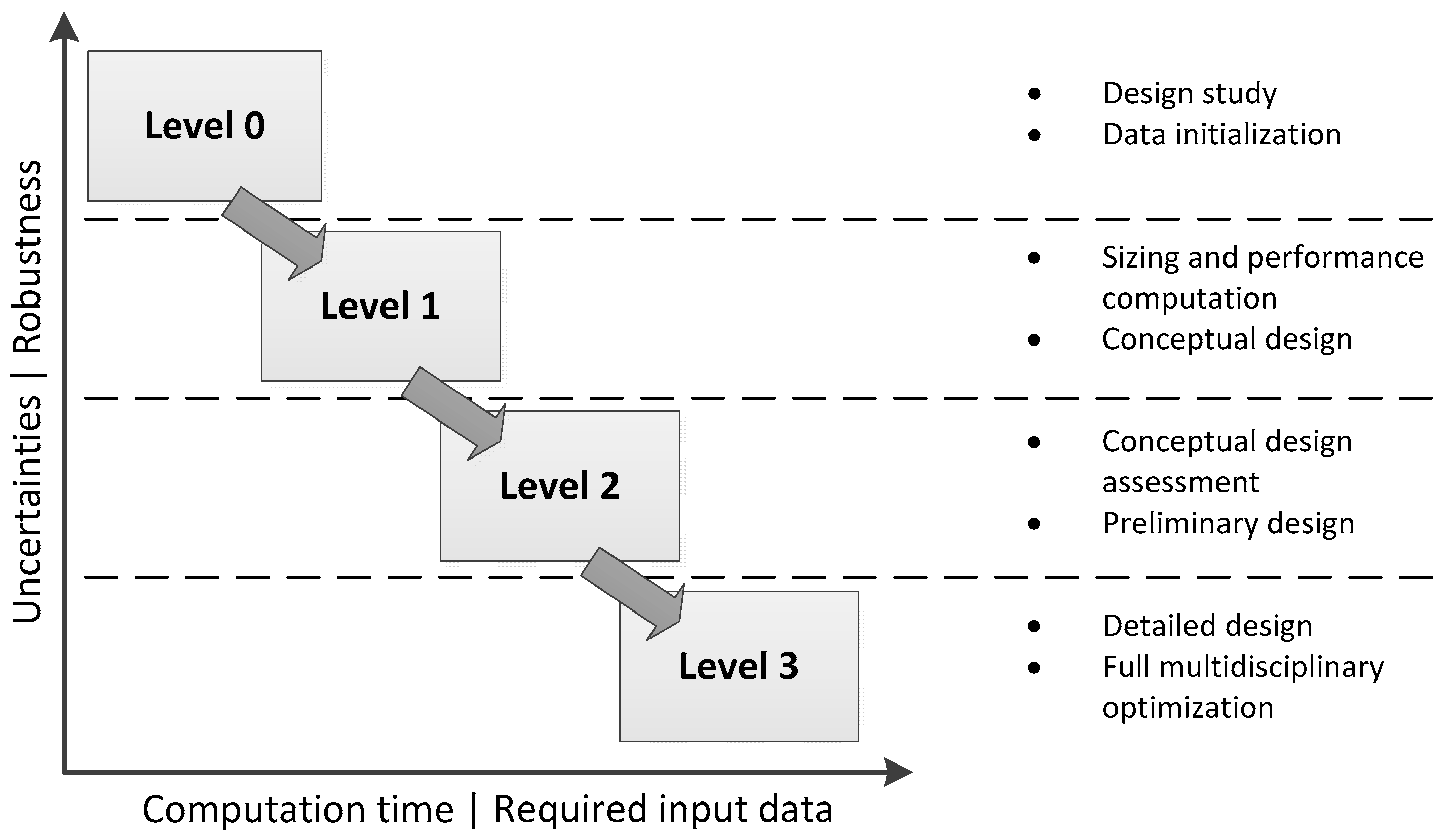
2.1. Tool Classification
- Level 0 tools use statistical and simple physical models. No loops are performed on this level; therefore, the computation time is very low. These tools mark the first dataset based on the TLARs (Top Level Aircraft Requirements) and on knowledge-based data.
- Level 1 tools conduct the primary sizing. This procedure typically iterates the maximum take-off mass. The tools use physical models of low to medium complexity to achieve short computation time and hands-off calculation.
- Level 2 tools are characterized by a more sophisticated physical modeling. Their pre- and post-processing procedures can still be performed automatically, but the required computation time exceeds the boundaries of iterative sizing. Furthermore, a general diminishing of the robustness can be observed by increasing the accuracy of the methods. A good example is the consideration of higher order aerodynamic problems like interactions or separated flow. The possibility to see and check the plausibility of results has to be given.
- Level 3 tools have the highest fidelity and the most complex modeling. Pre- and post-processing procedures need additional input to solve necessary meshing tasks. In order to conduct full MDO (multidisciplinary design and optimization), secondary data has to be stored. The computation time is the highest. No level 3 tools are integrated into the presented design environment to date.
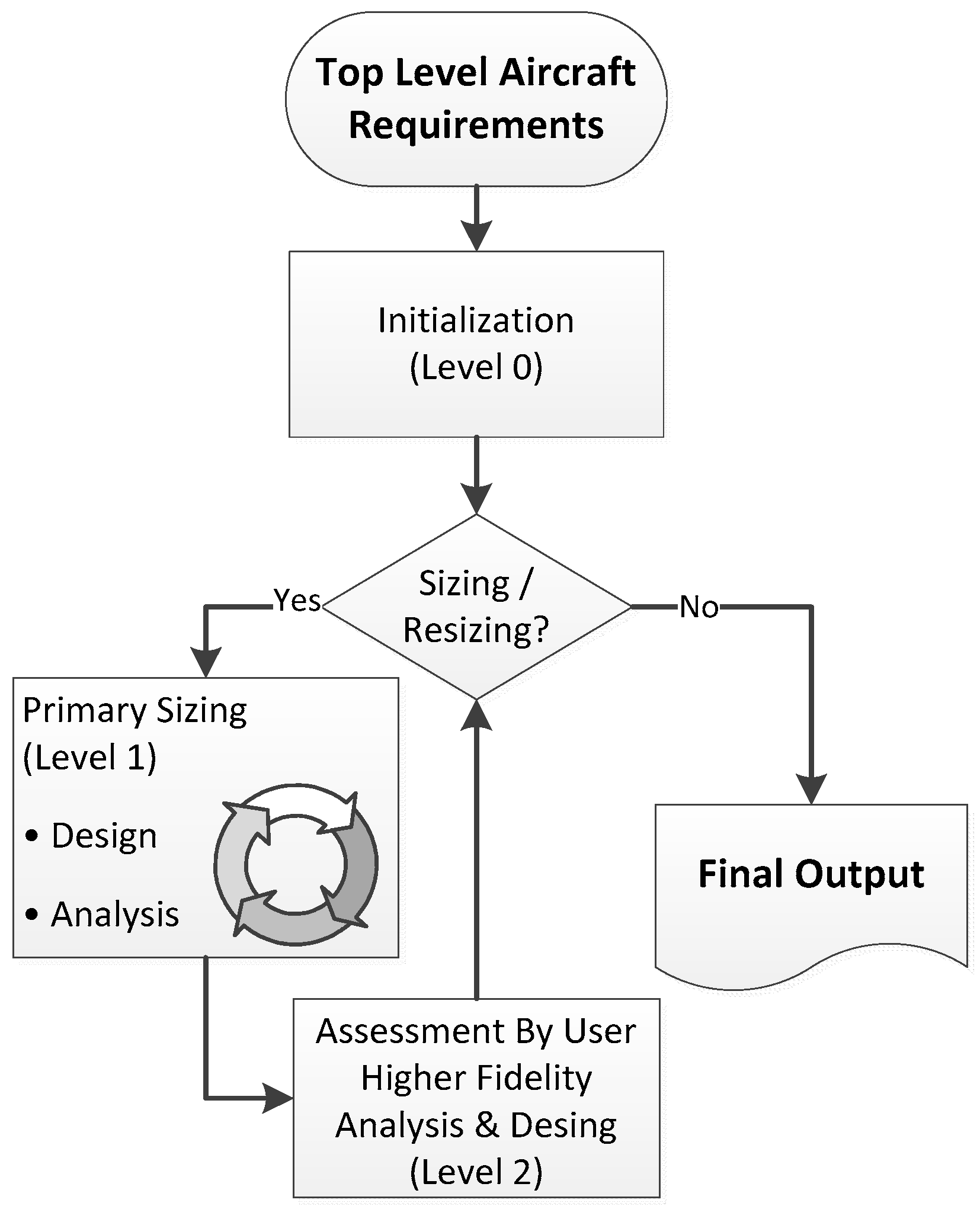
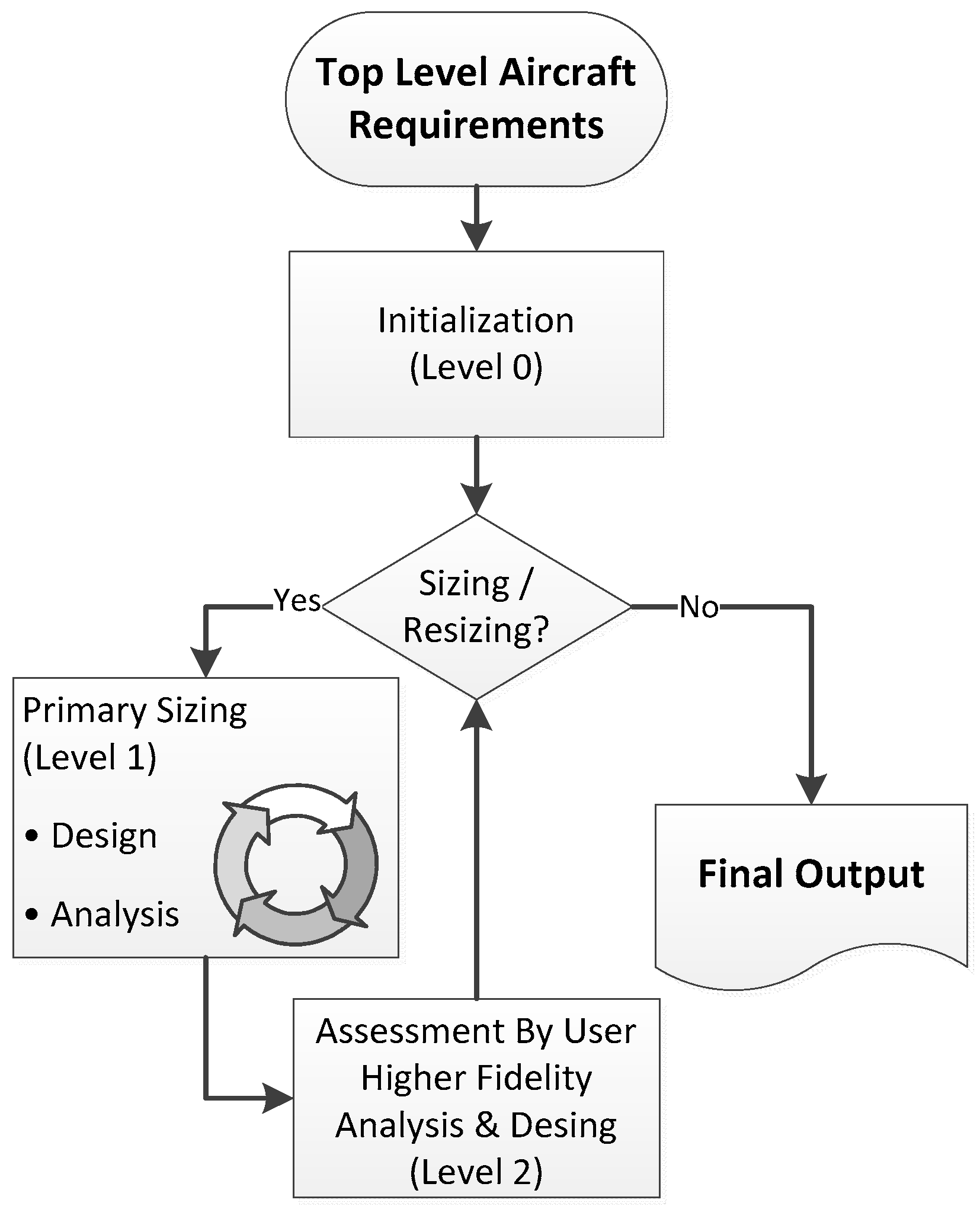
2.2. Process Architecture
2.3. Collaboration and Network
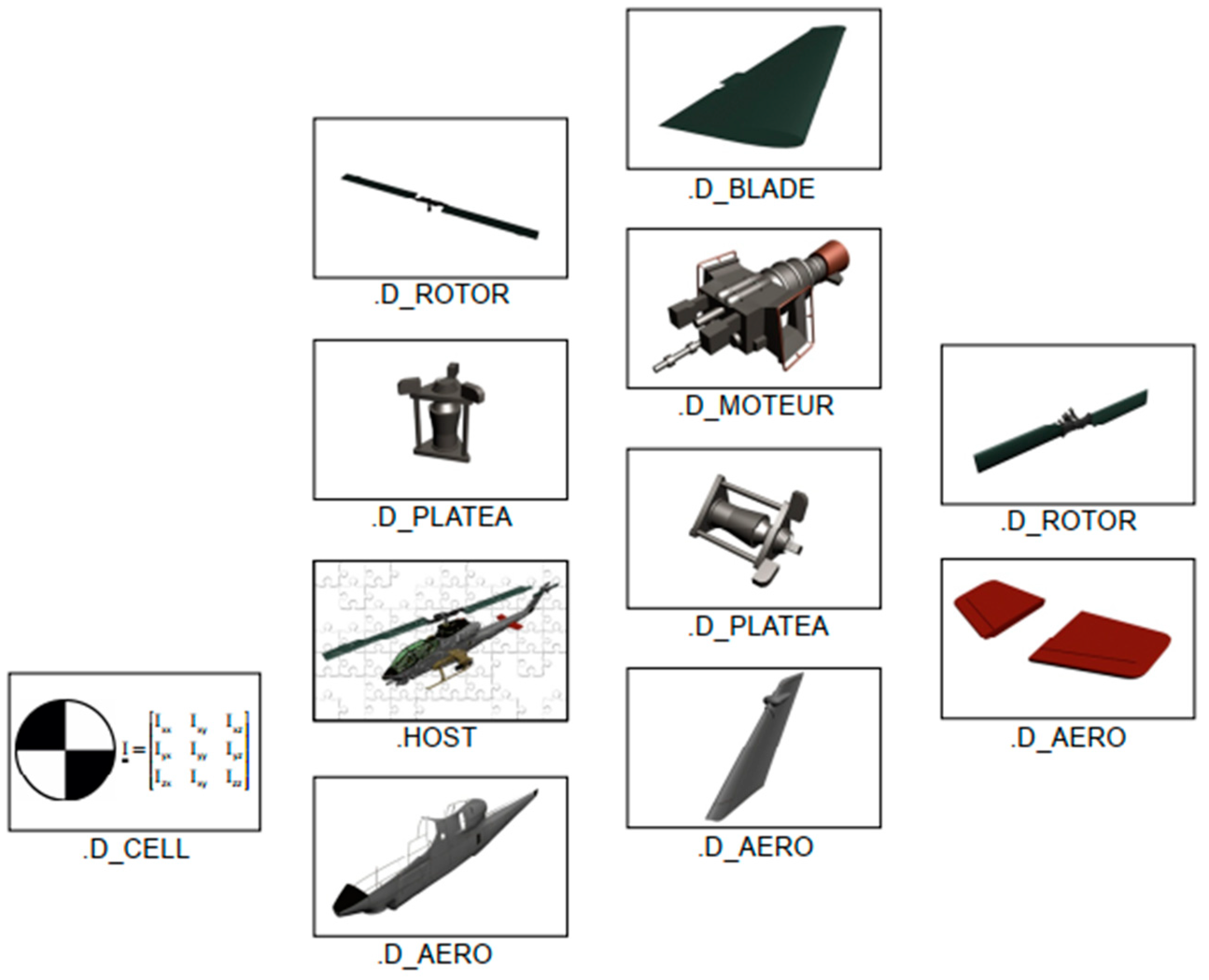
2.4. Implementation of Flight Simulation Tool
3. Initialization of First Data
3.1. Requirements
- The technical requirements determine the boundaries and demands for the external configuration. They describe and, if necessary, extrapolate the state of the art related to the specific design.
- The mission requirements give information about the use of the rotorcraft, which is at minimum the triplet of range, payload and flight speed.
- The performance requirements describe the flight conditions of the design mission profile and define the flight envelope.
3.2. Mass Fractions
3.3. First Dimensions of the Rotors
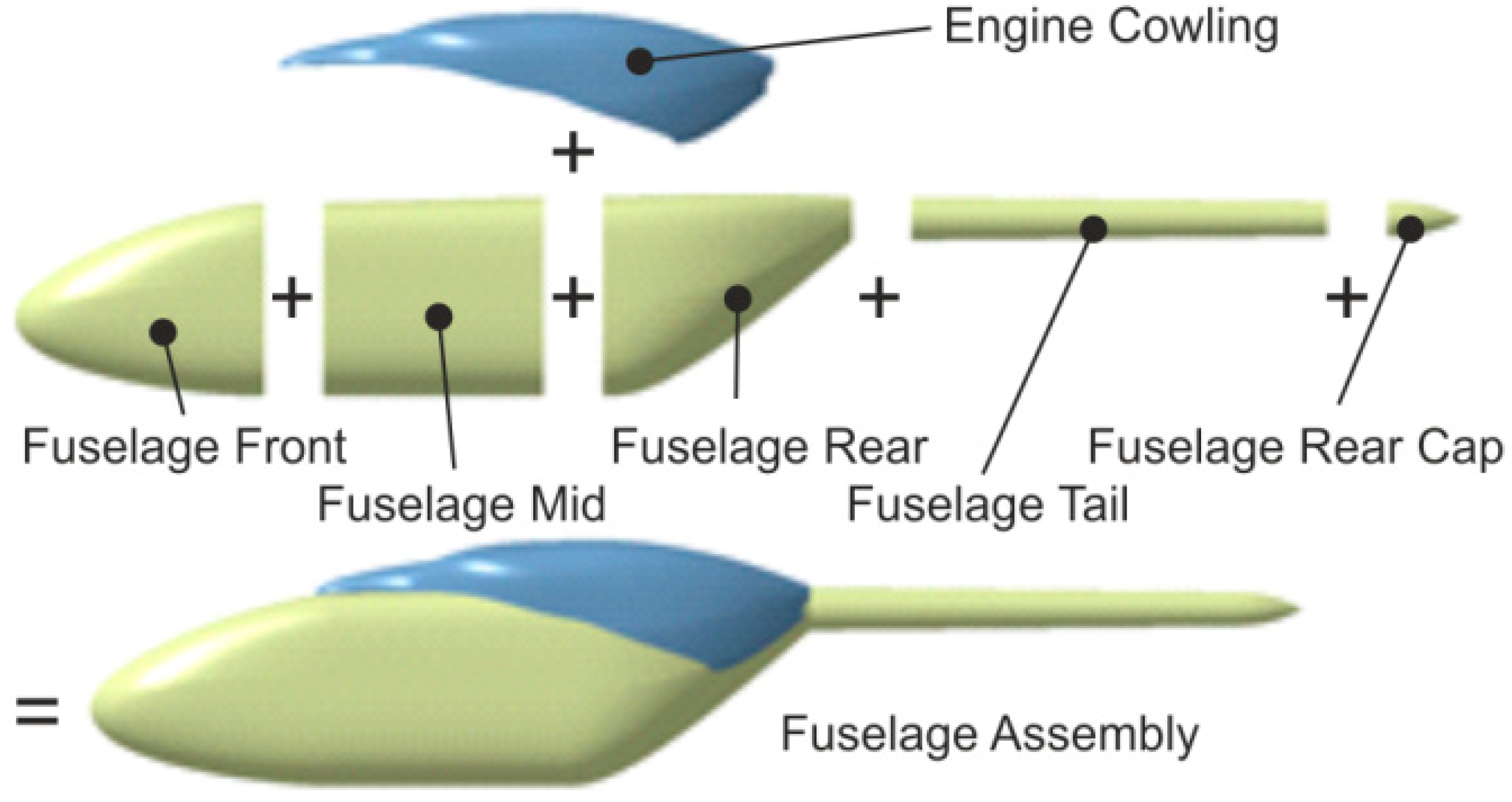
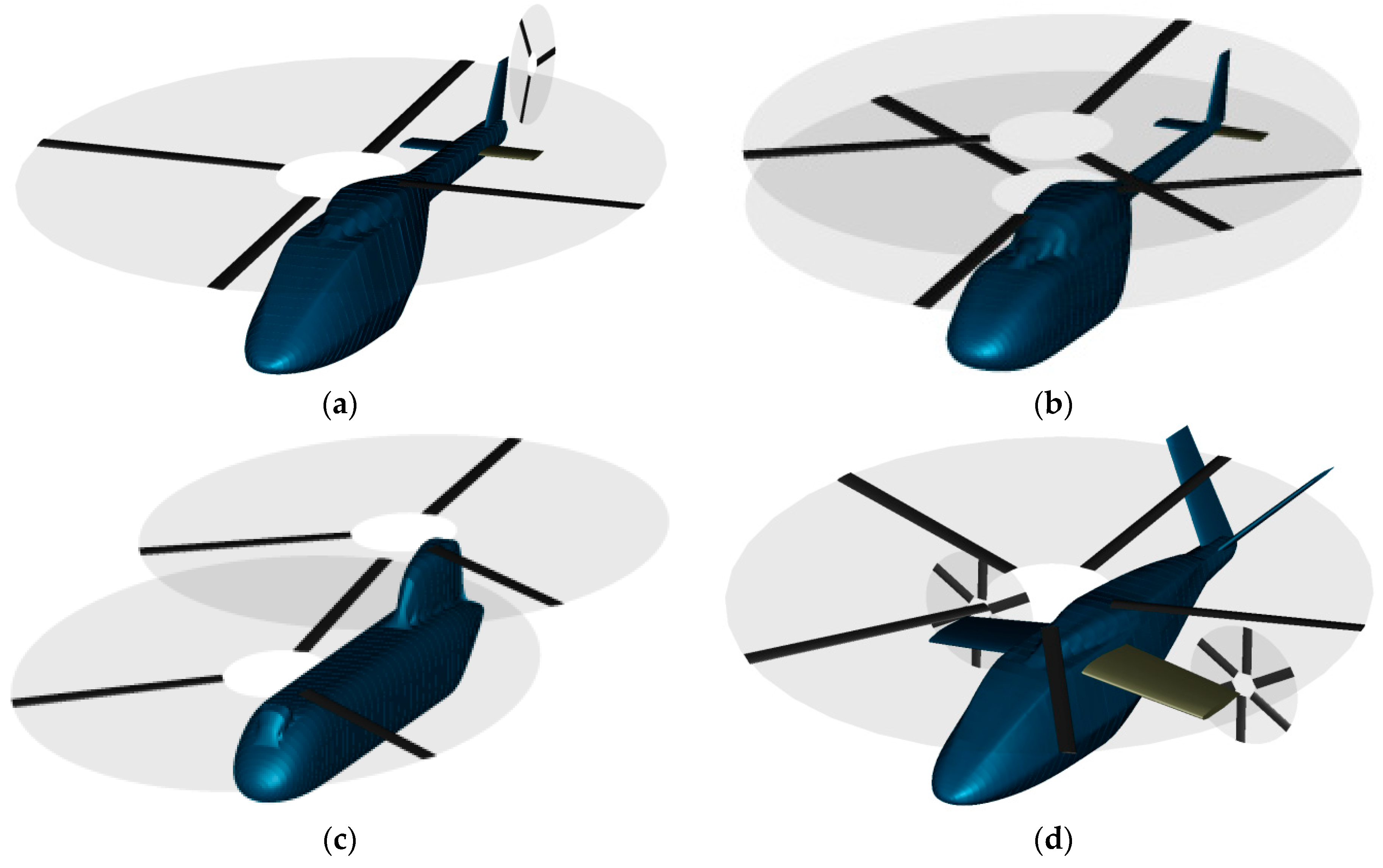
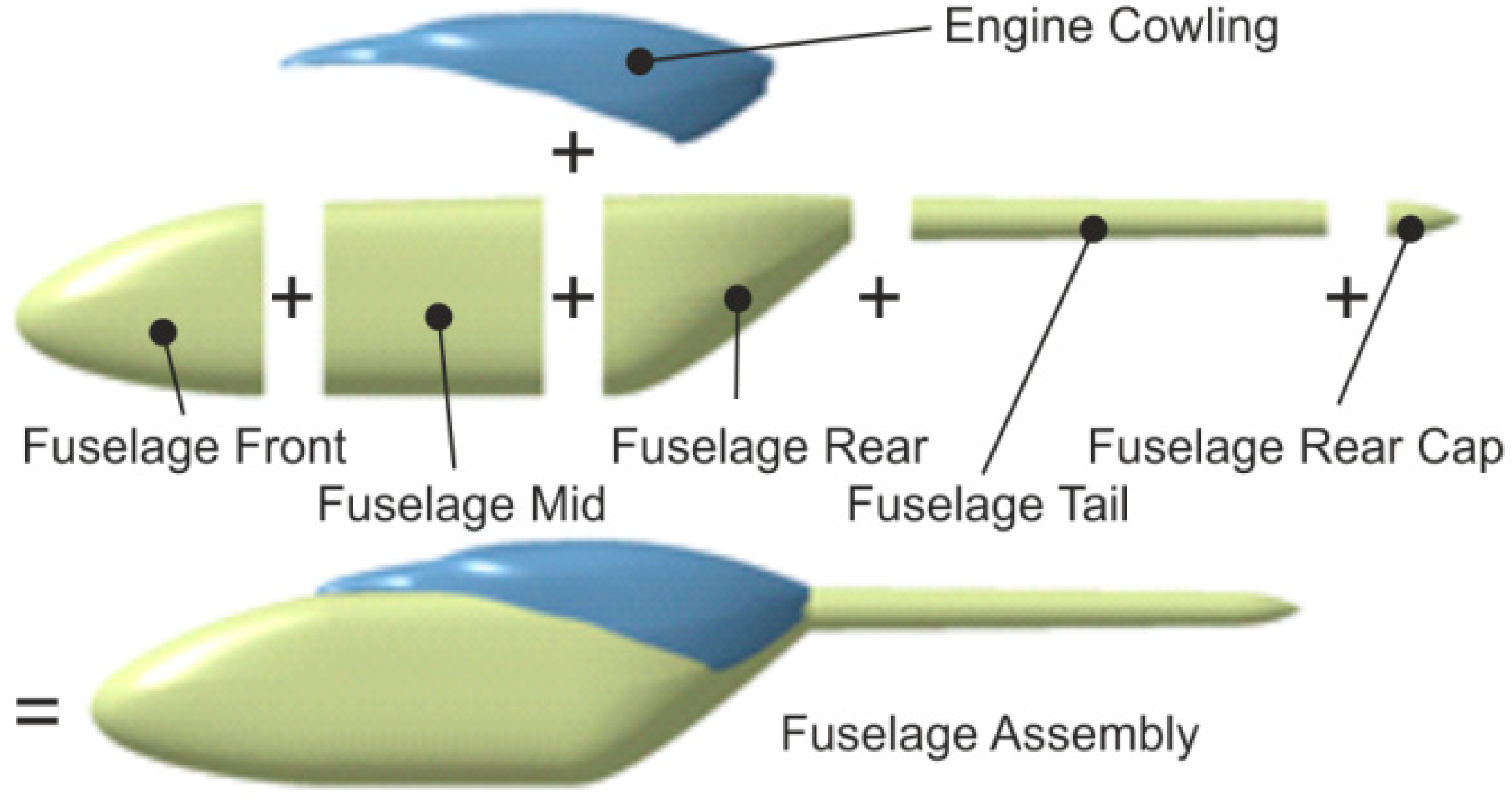
3.4. Fuselage Dimensions and Geometry Generation
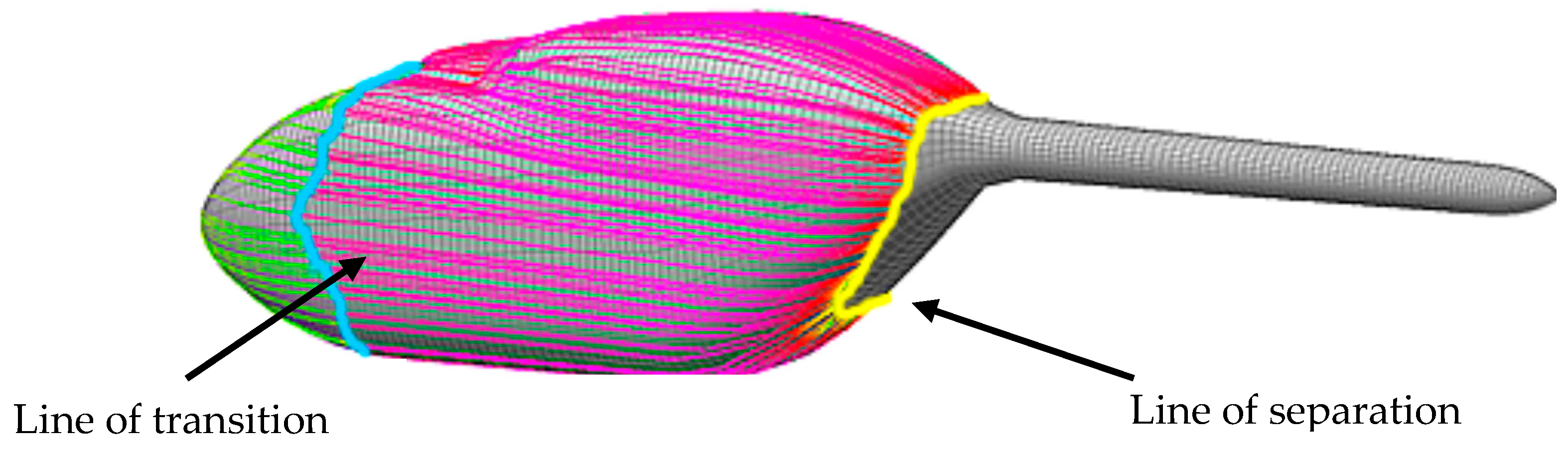
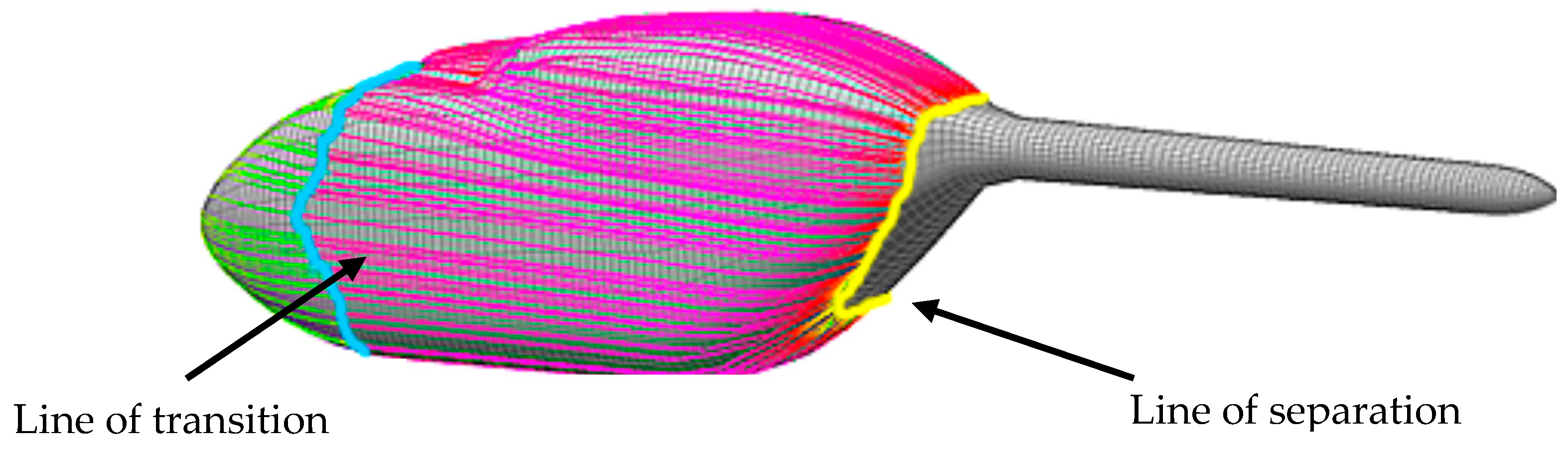
3.5. Calculation of Aerodynamic Coefficients
4. Conceptual Sizing
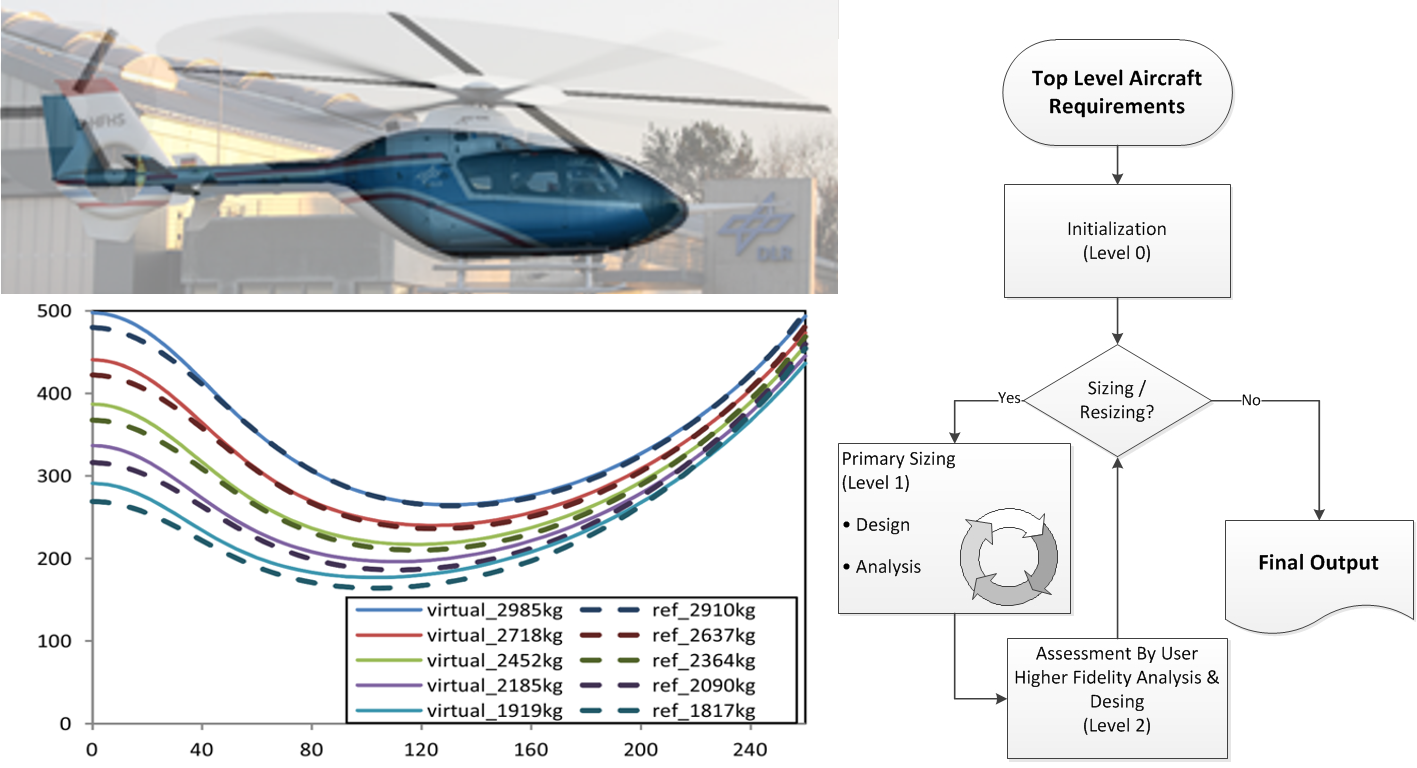
4.1. Primary Sizing Loop
4.2. Sizing Tasks
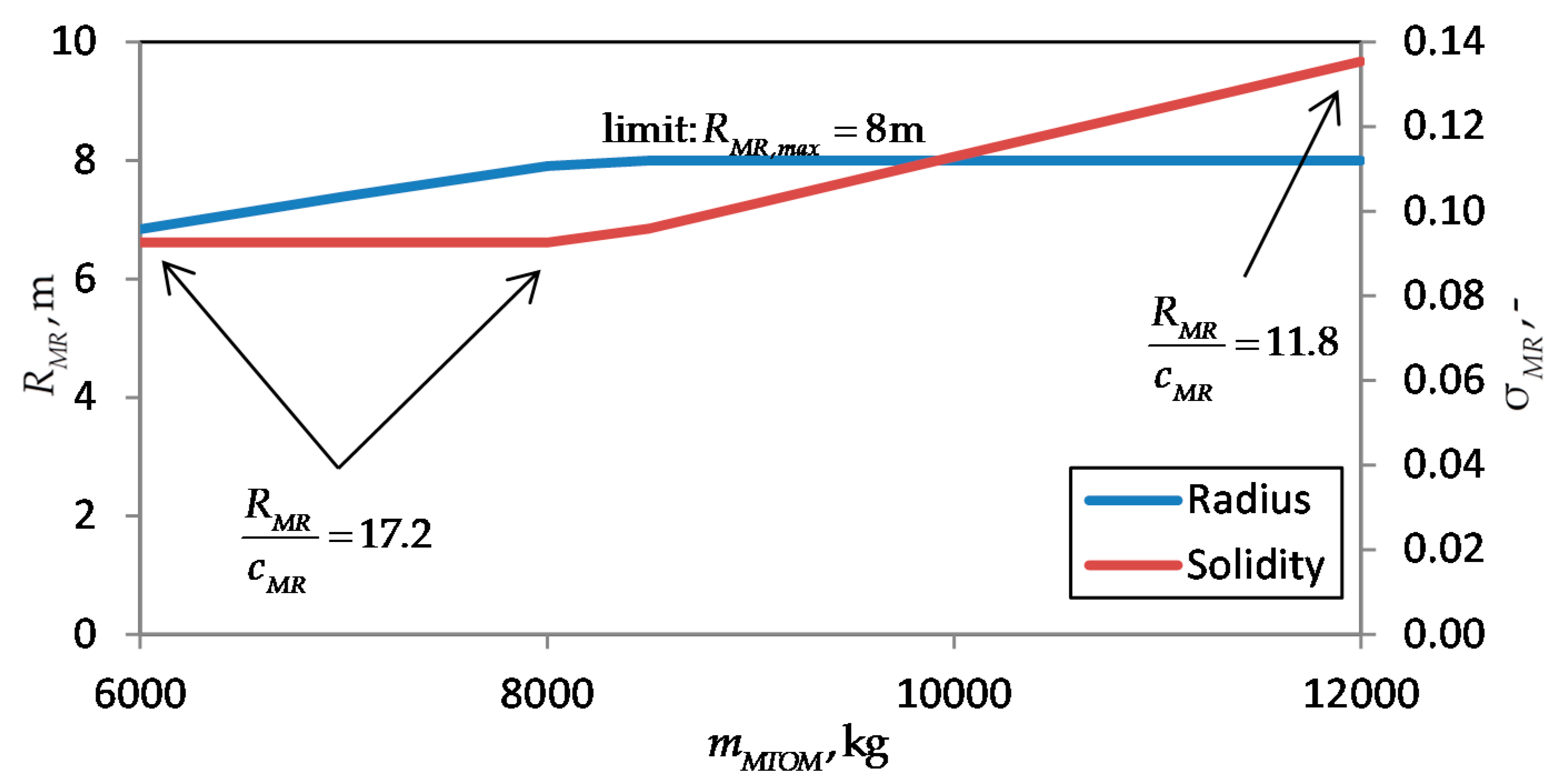
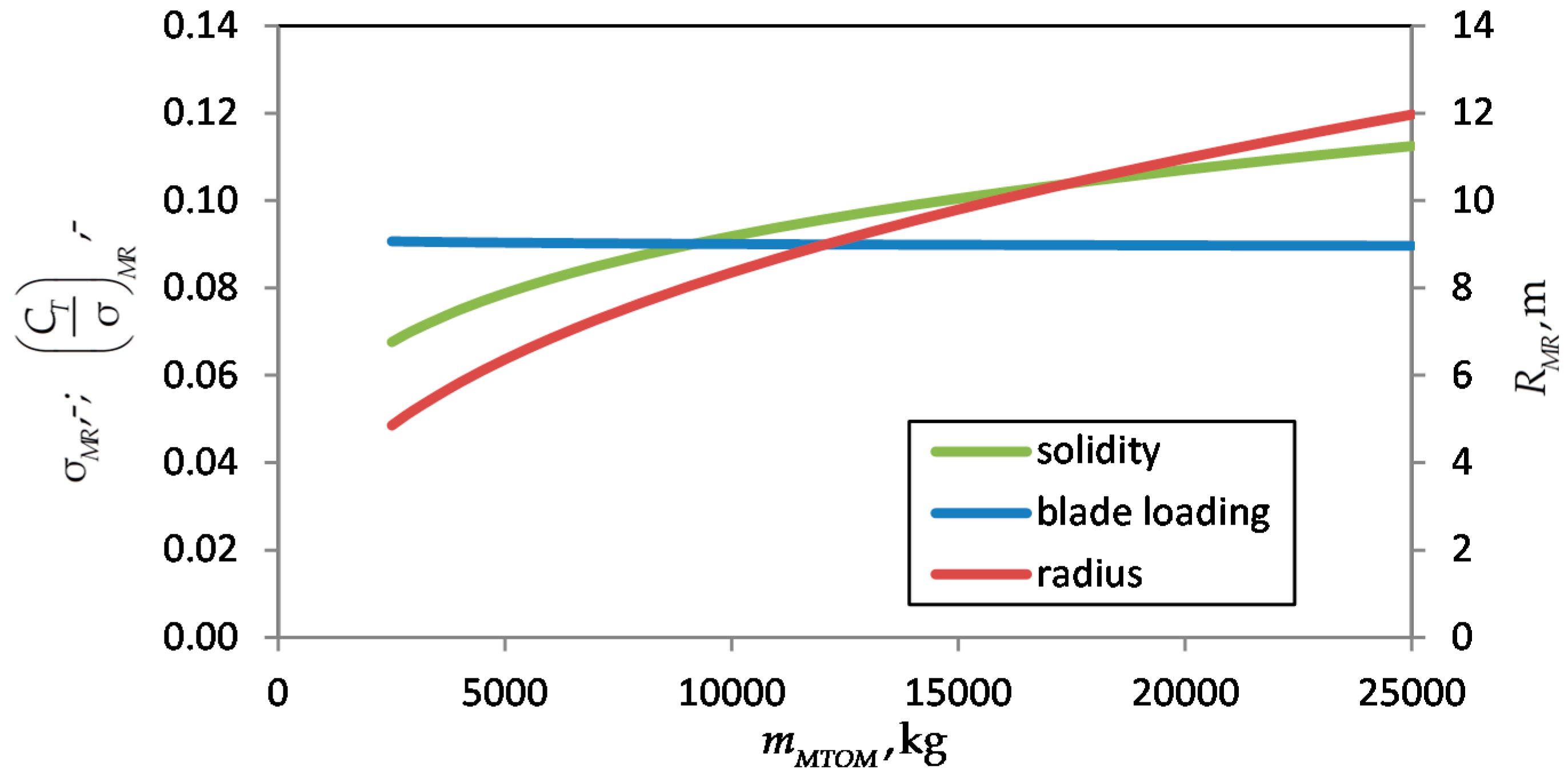
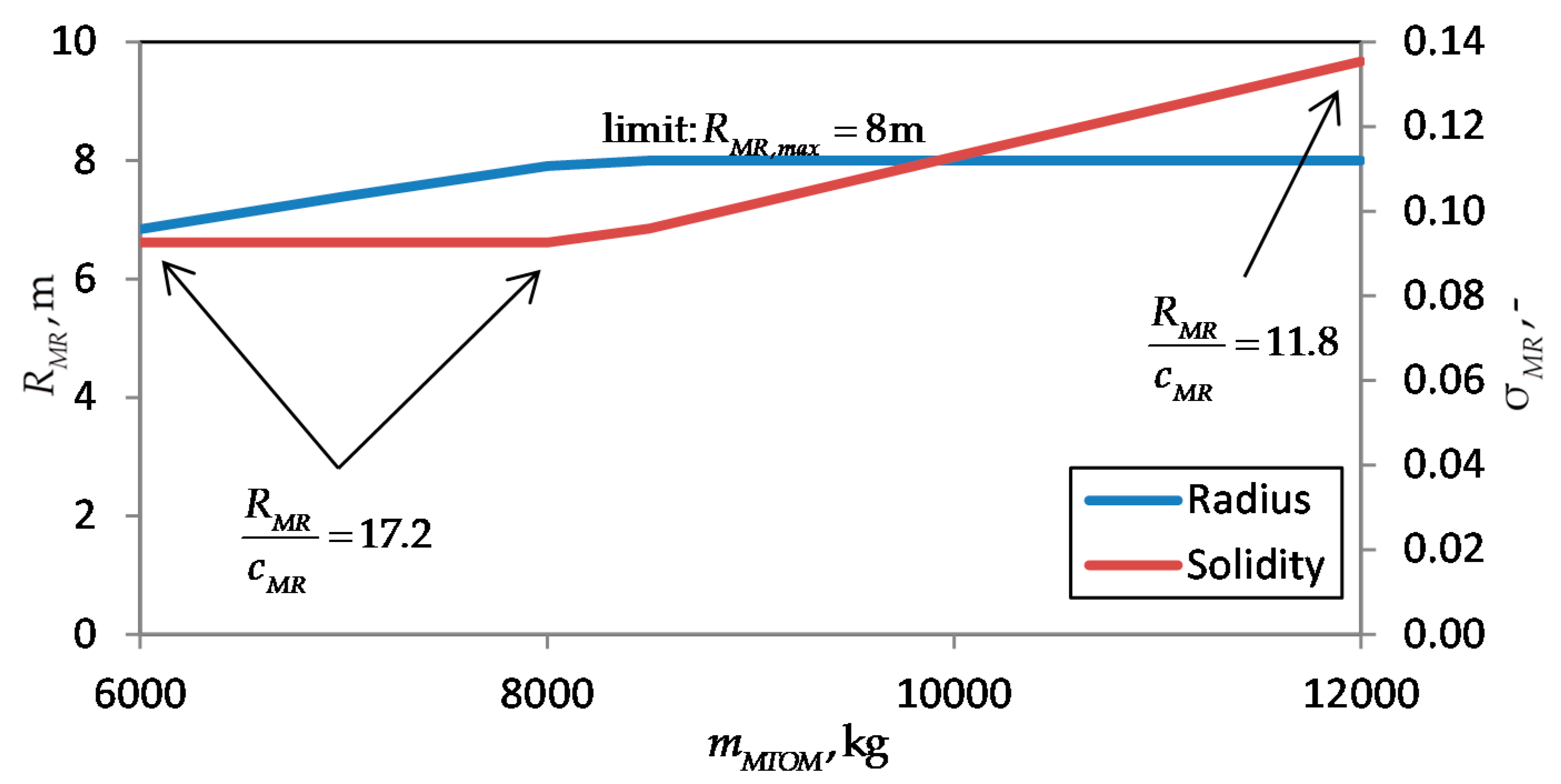
4.2.1. Rotor Sizing
- Sizing with regression curves according to Equations (8) and (9).
- Sizing with a specified disc loading .
- Sizing with a specified blade loading in connection with different combinations of flight altitude and ambient temperature.
- Setting a boundary for a maximum allowed rotor radius.
- Setting a constant rotor radius and sizing the rotor solidity (constant blade loading with a variable disc loading)
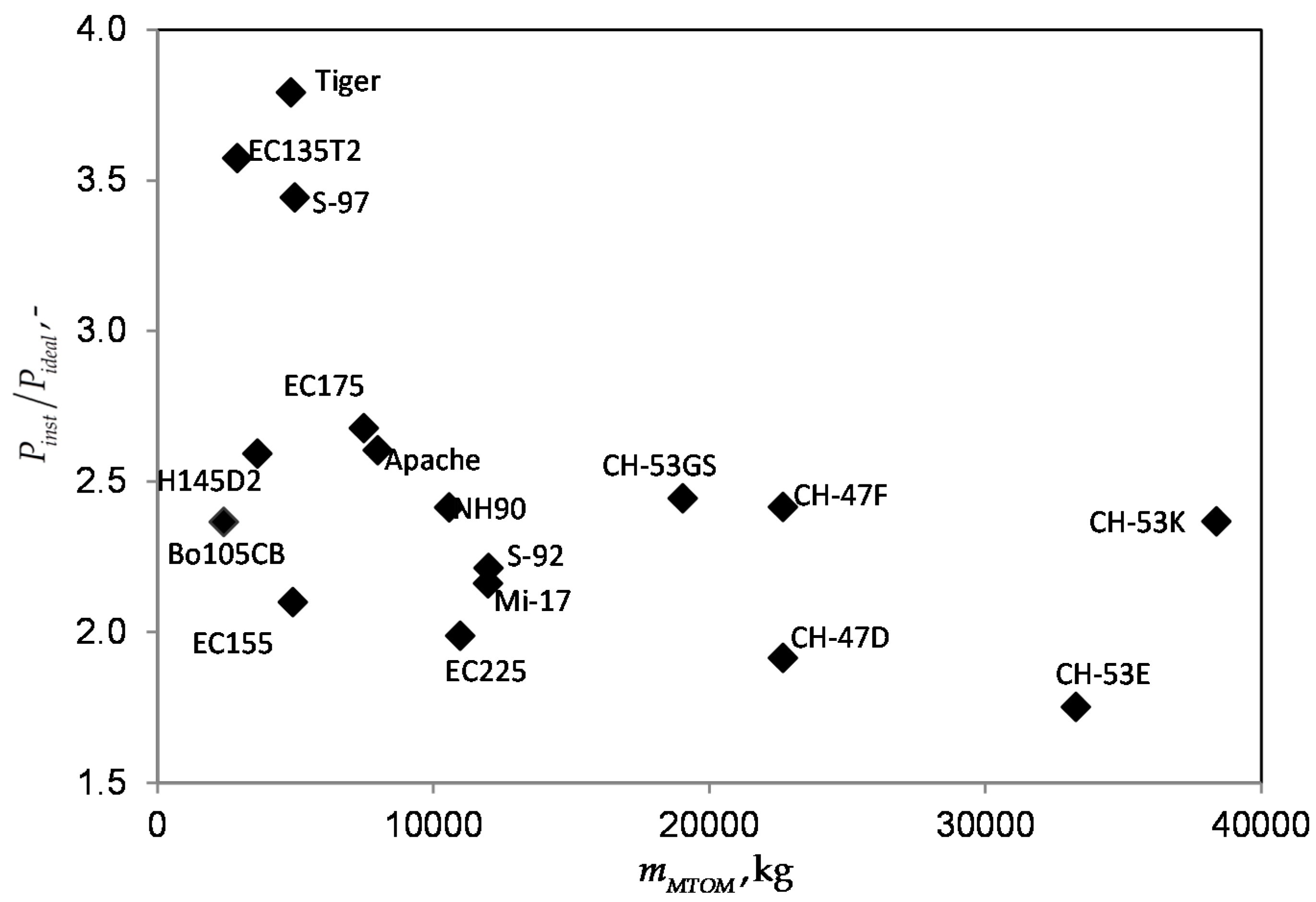
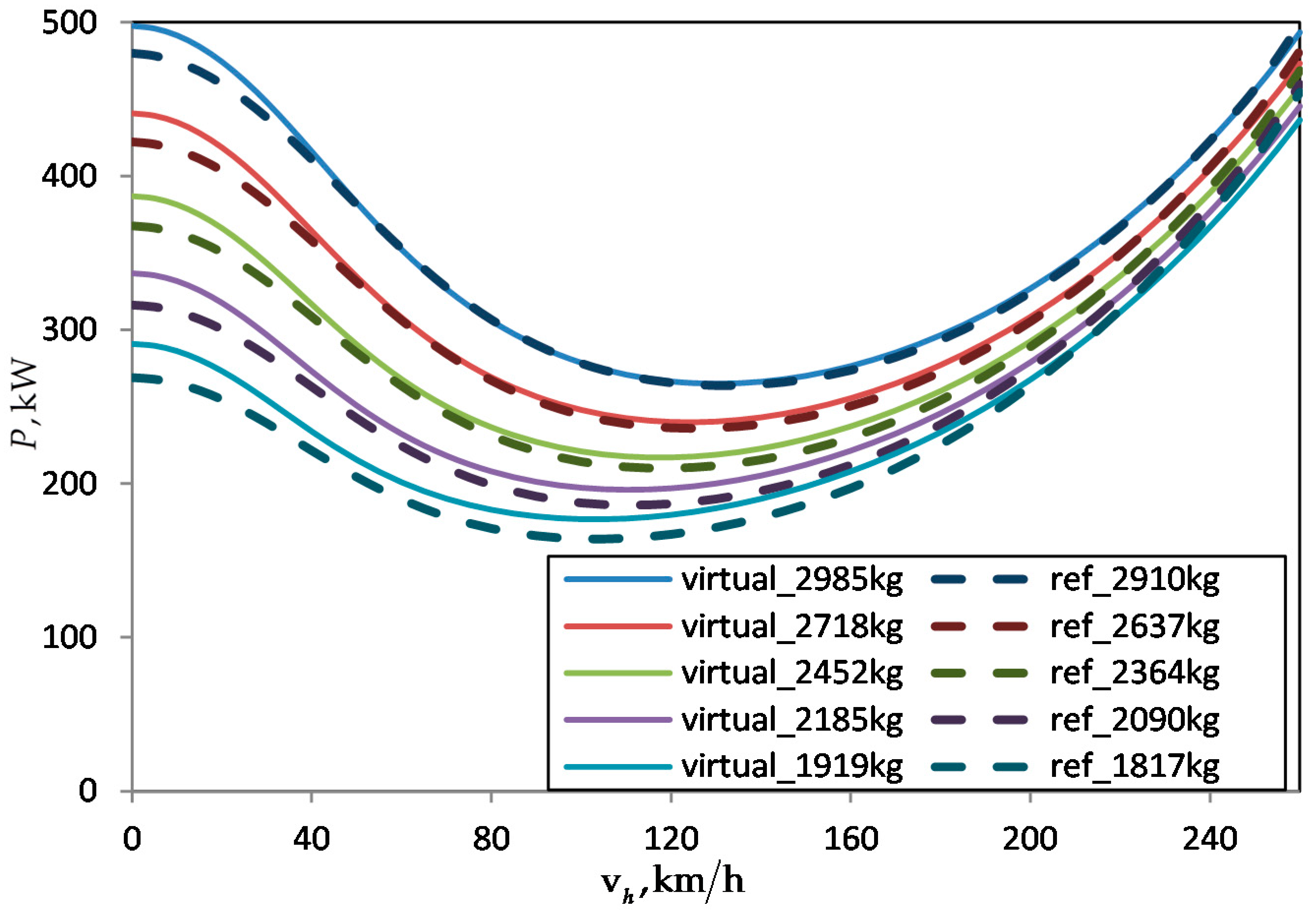
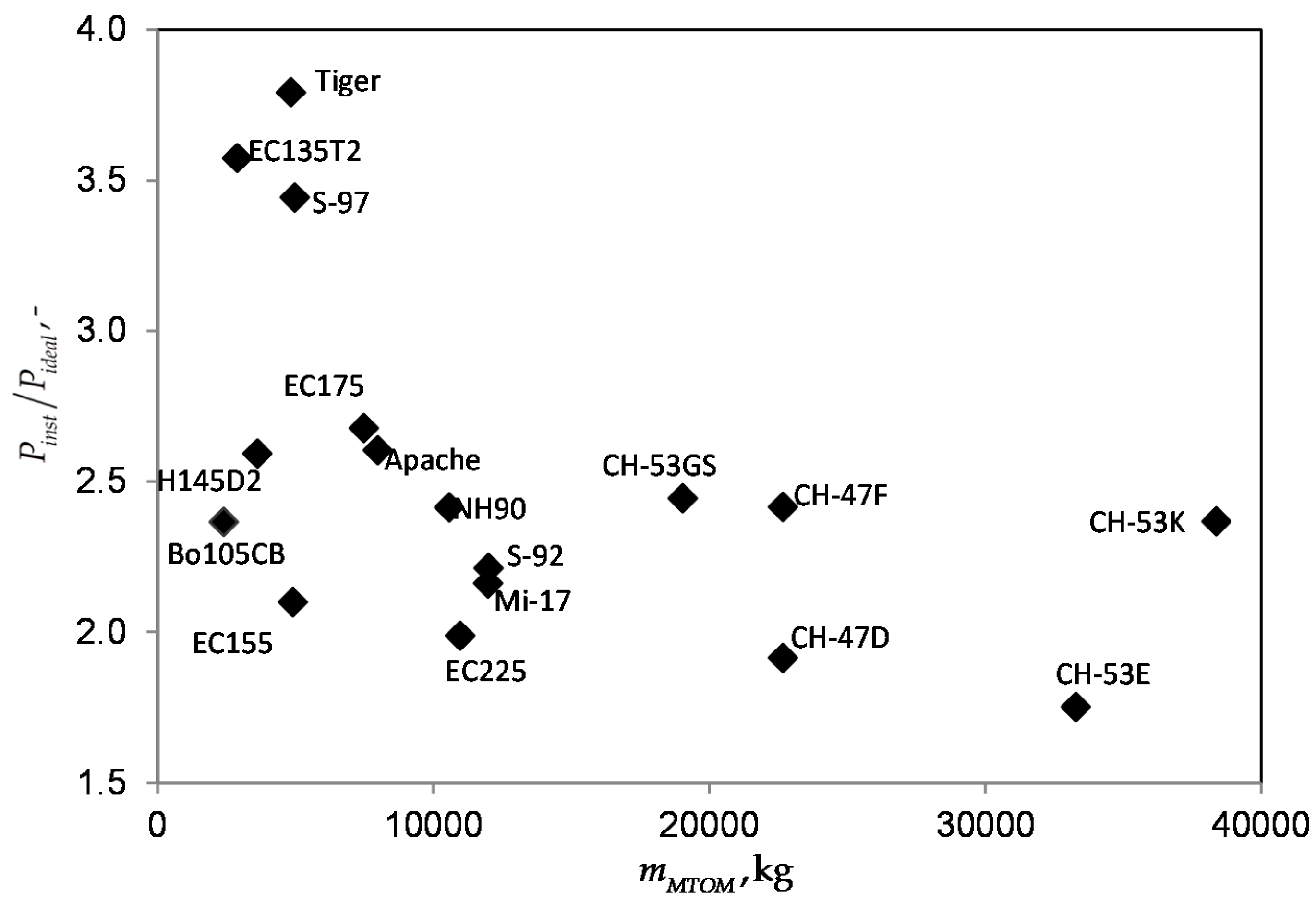
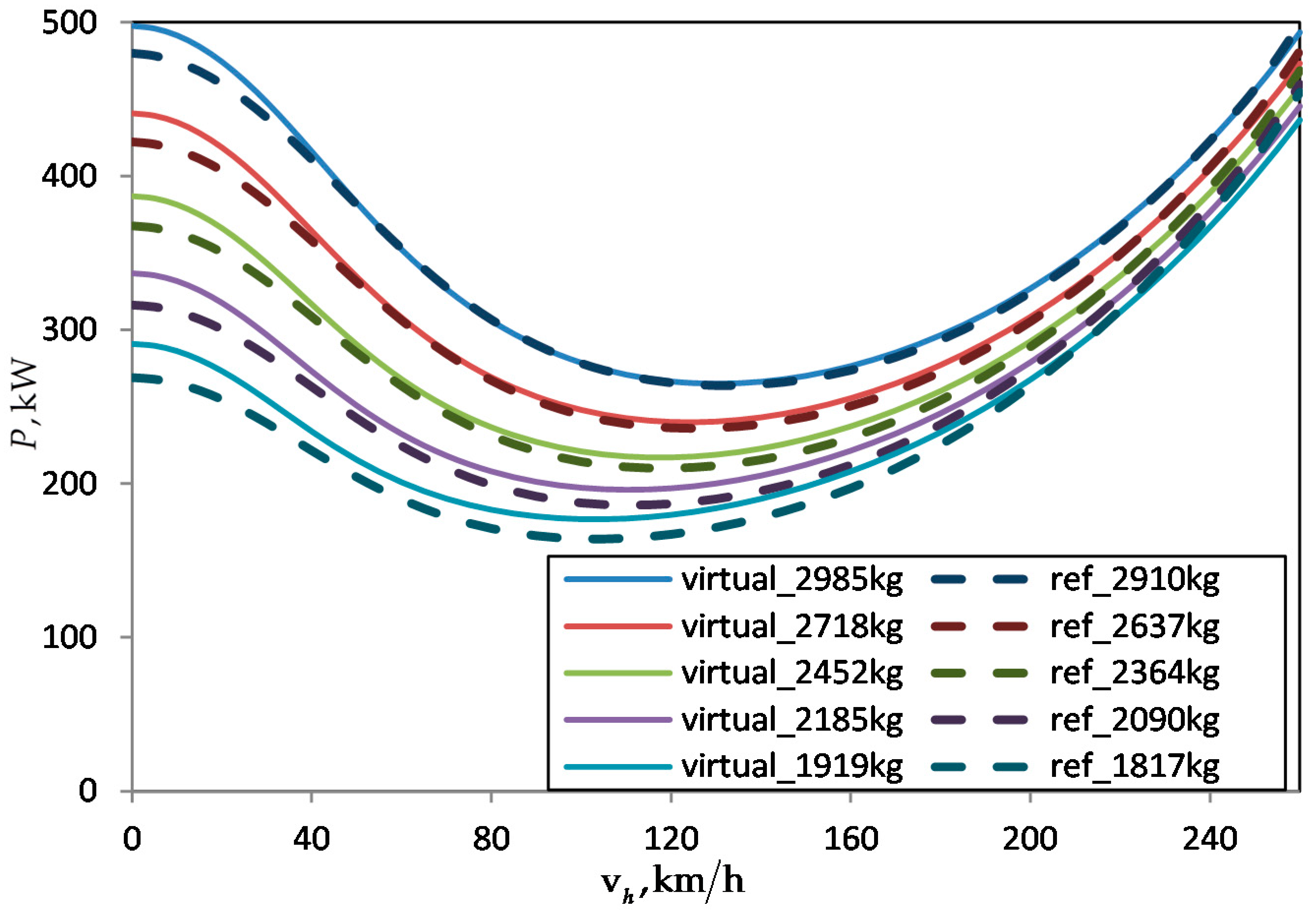
4.2.2. Installed Power
4.2.3. Geometry Adaption
4.2.4. Aerodynamic Coefficient
4.3. Fuel Mass Estimation
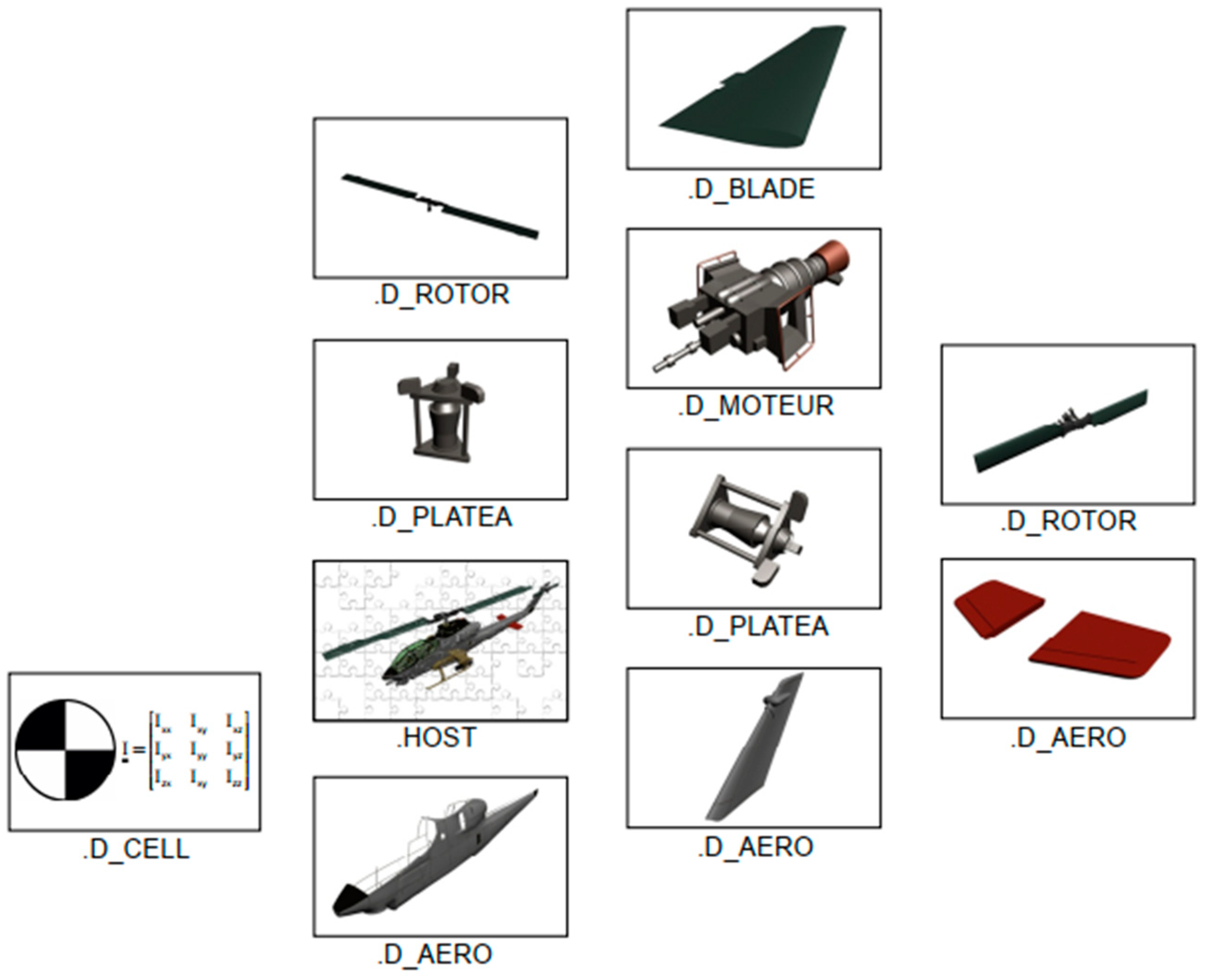
4.3.1. Flight Mechanics Model Generation
4.3.2. Calculation of Fuel Mass per Flight Segment
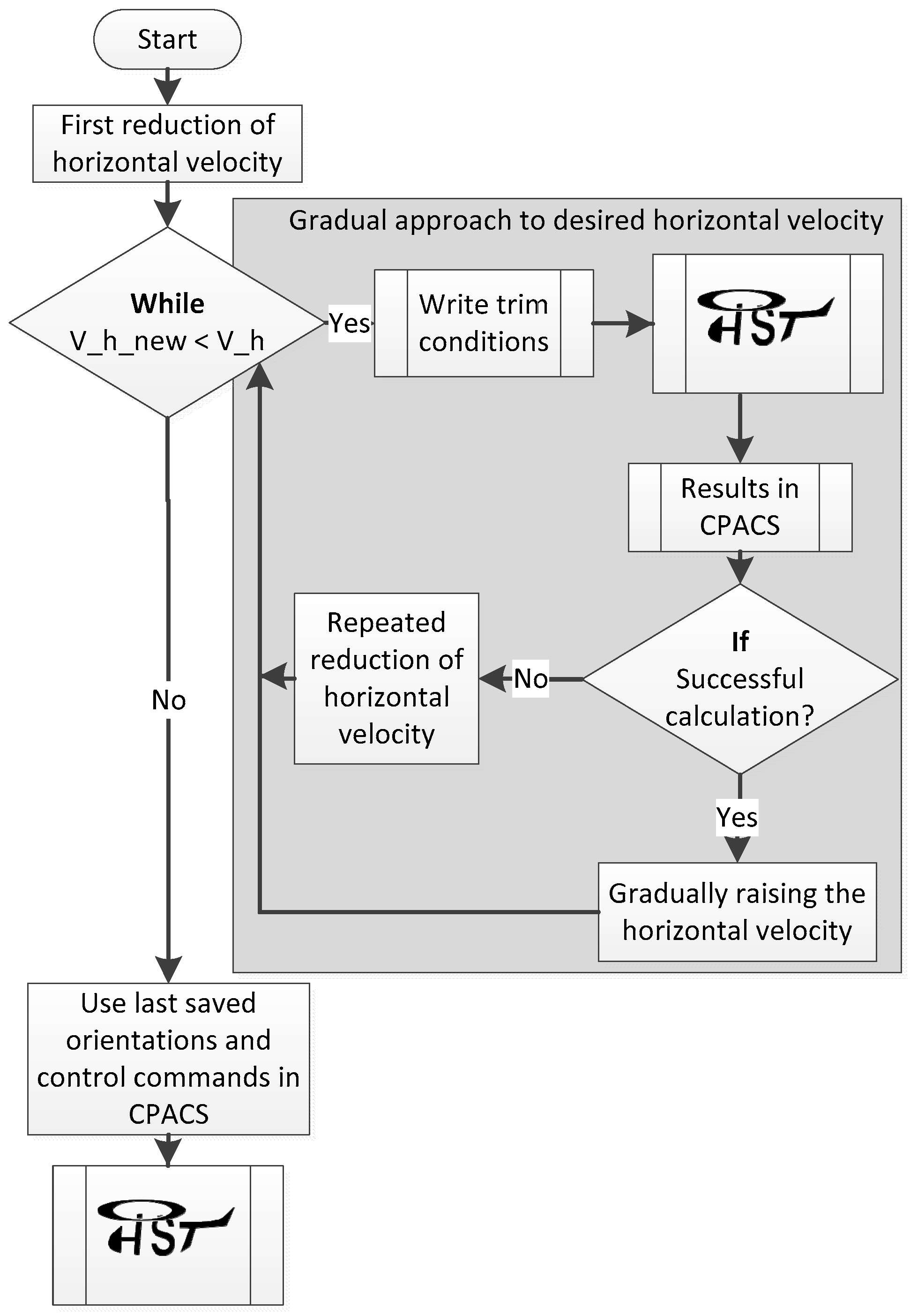
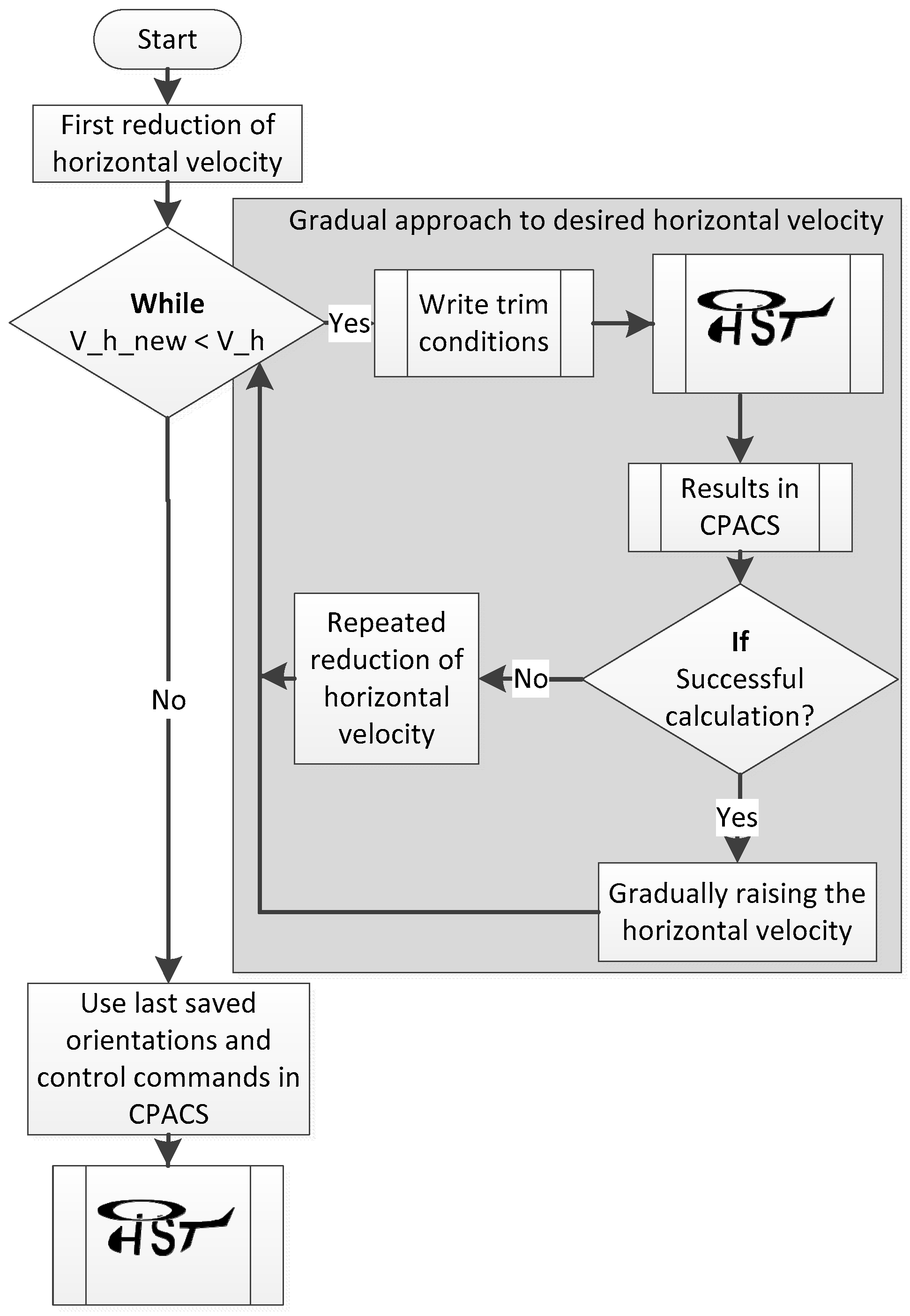
4.3.3. Special Considerations for Trim Points with High Velocities
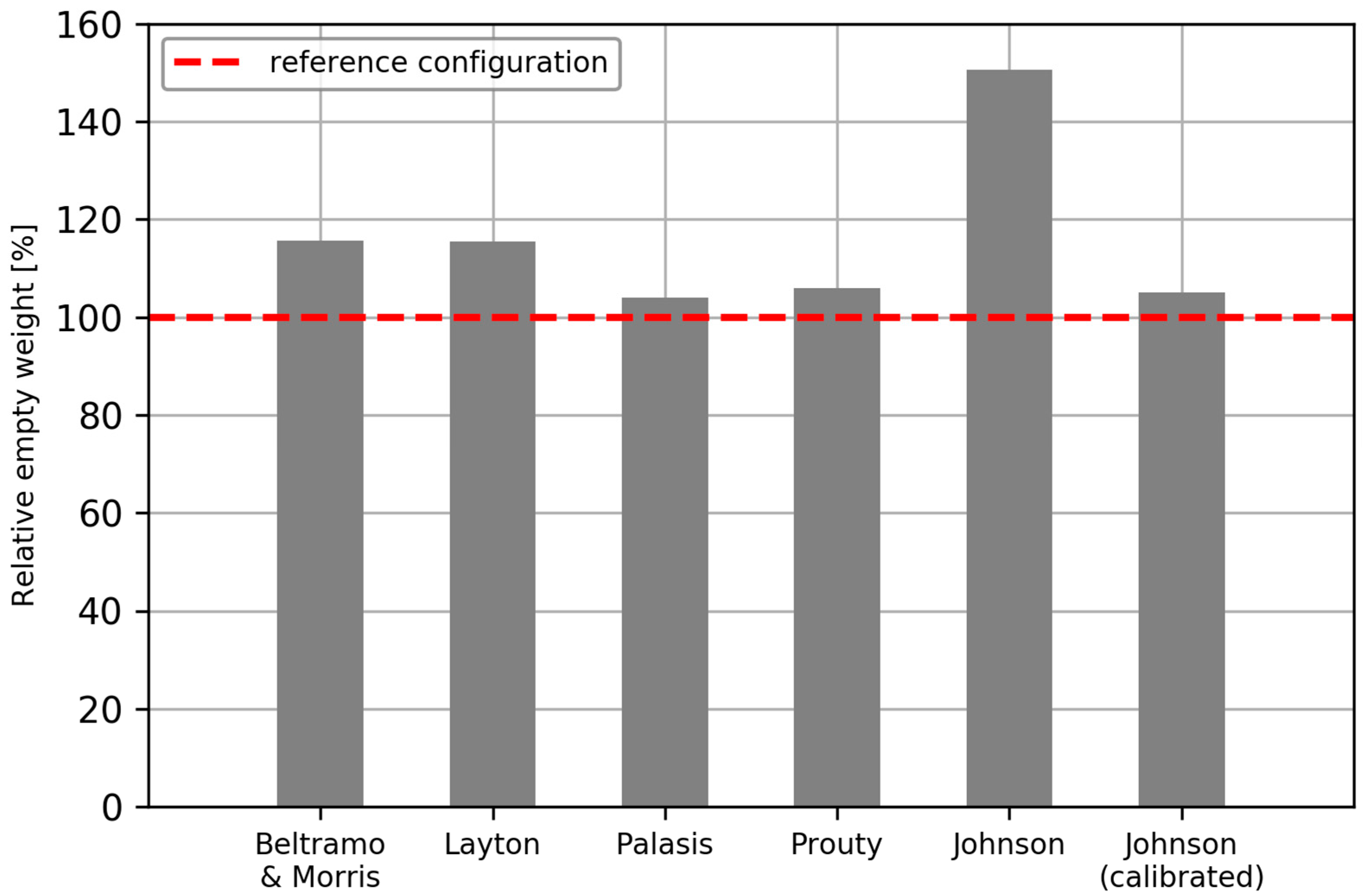
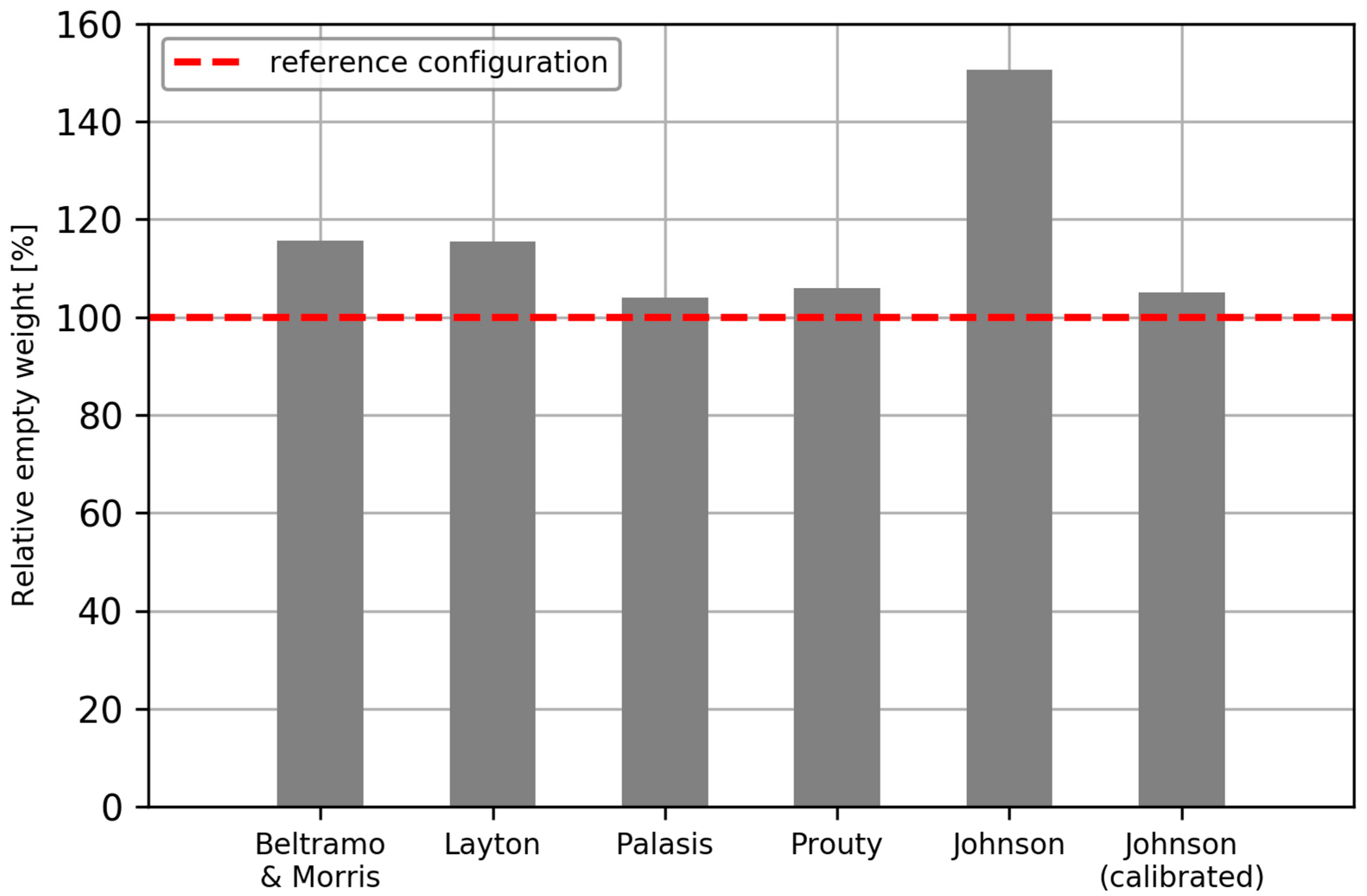
4.4. Component Mass Estimation
5. Example for Sizing Study
5.1. Evaluation by Short Design Study
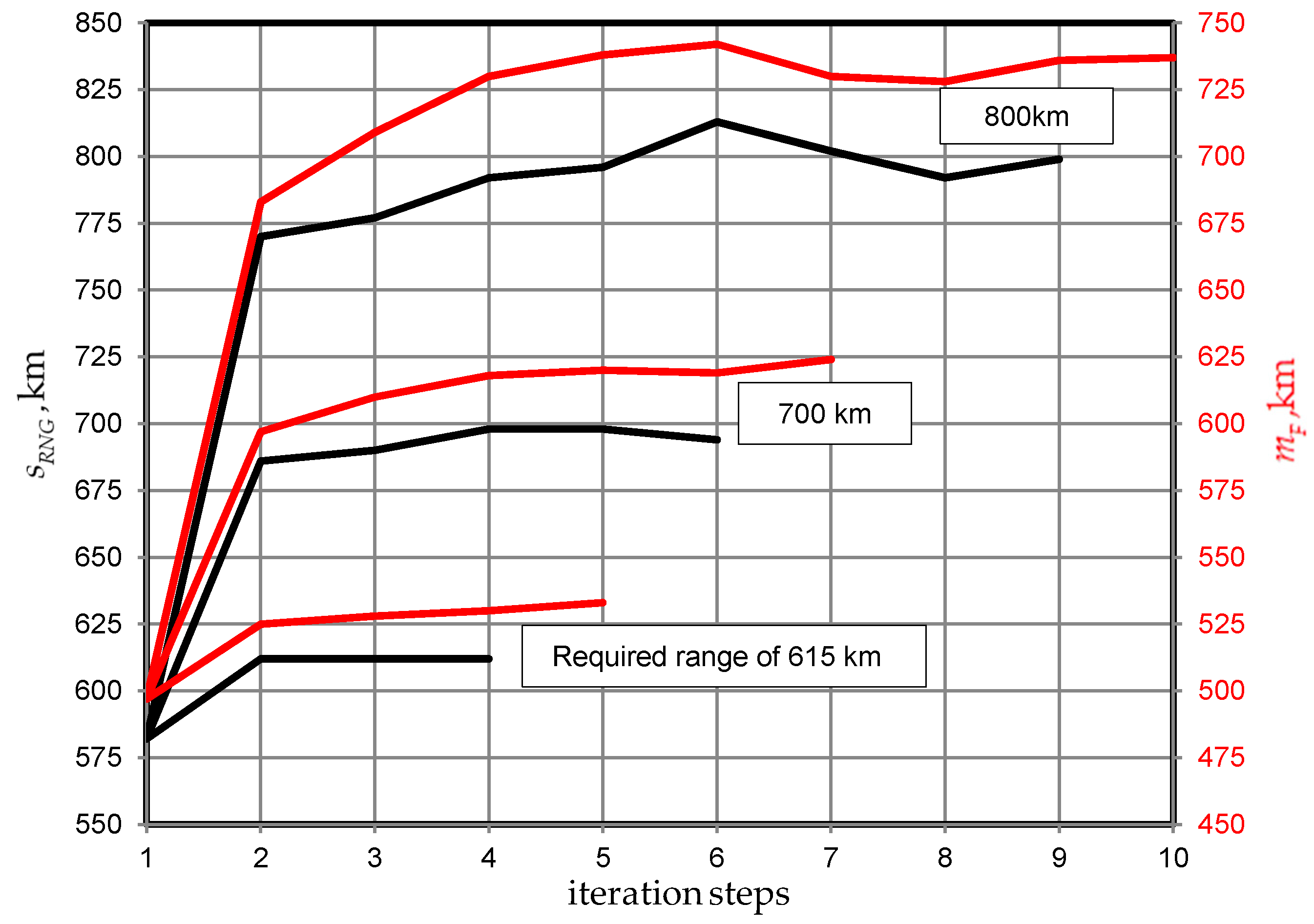
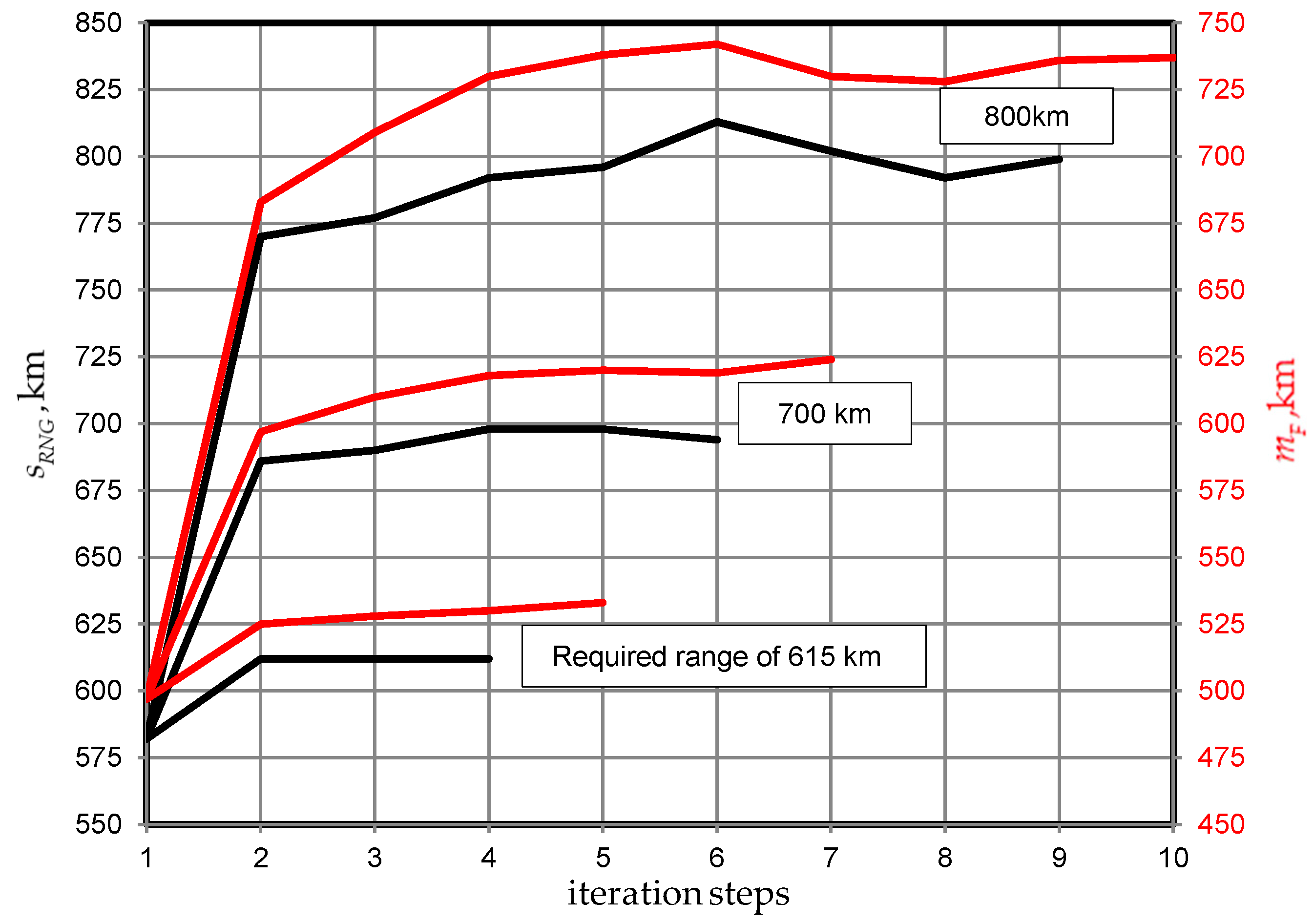
5.2. Variation of Flight Range
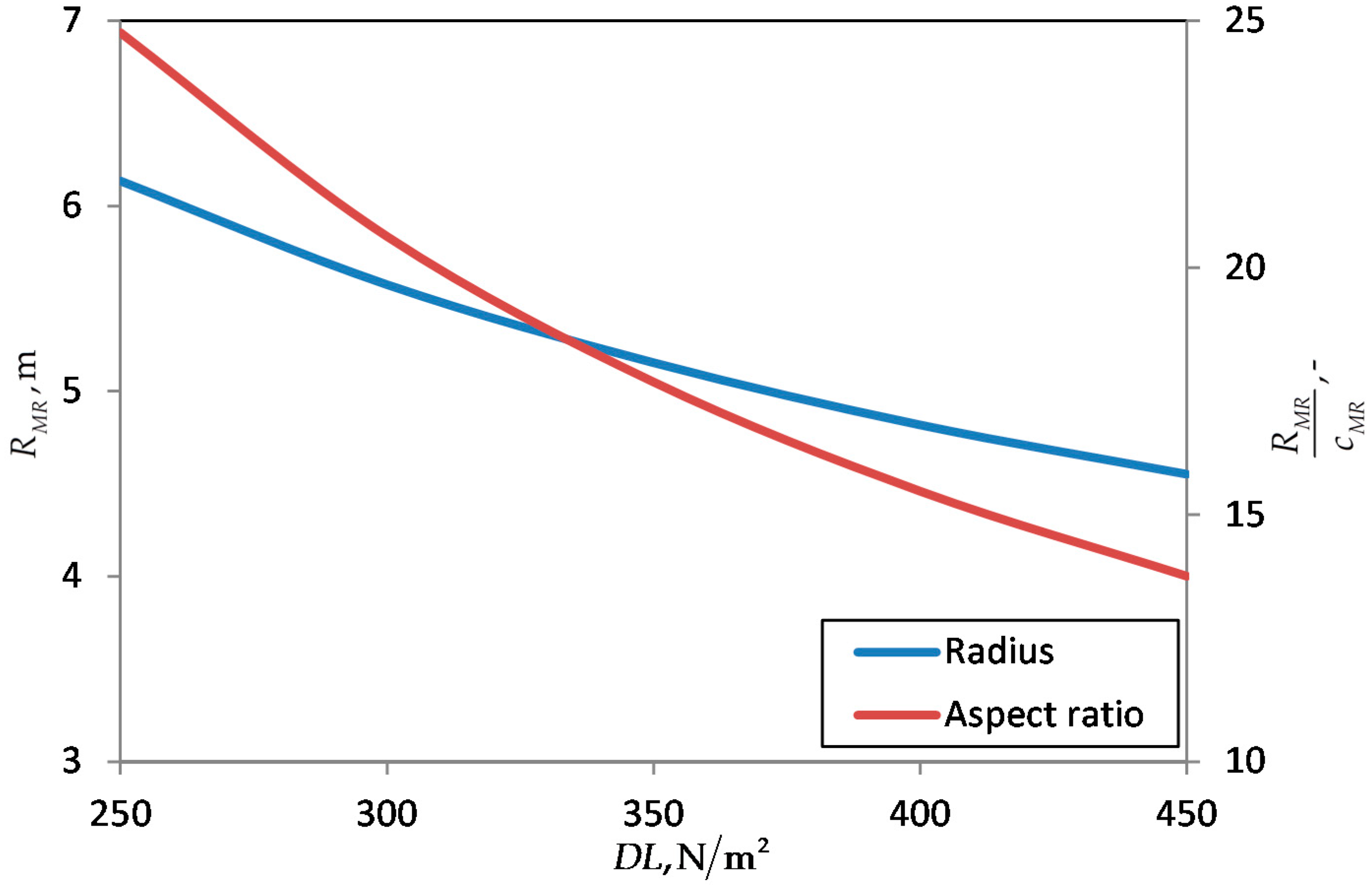
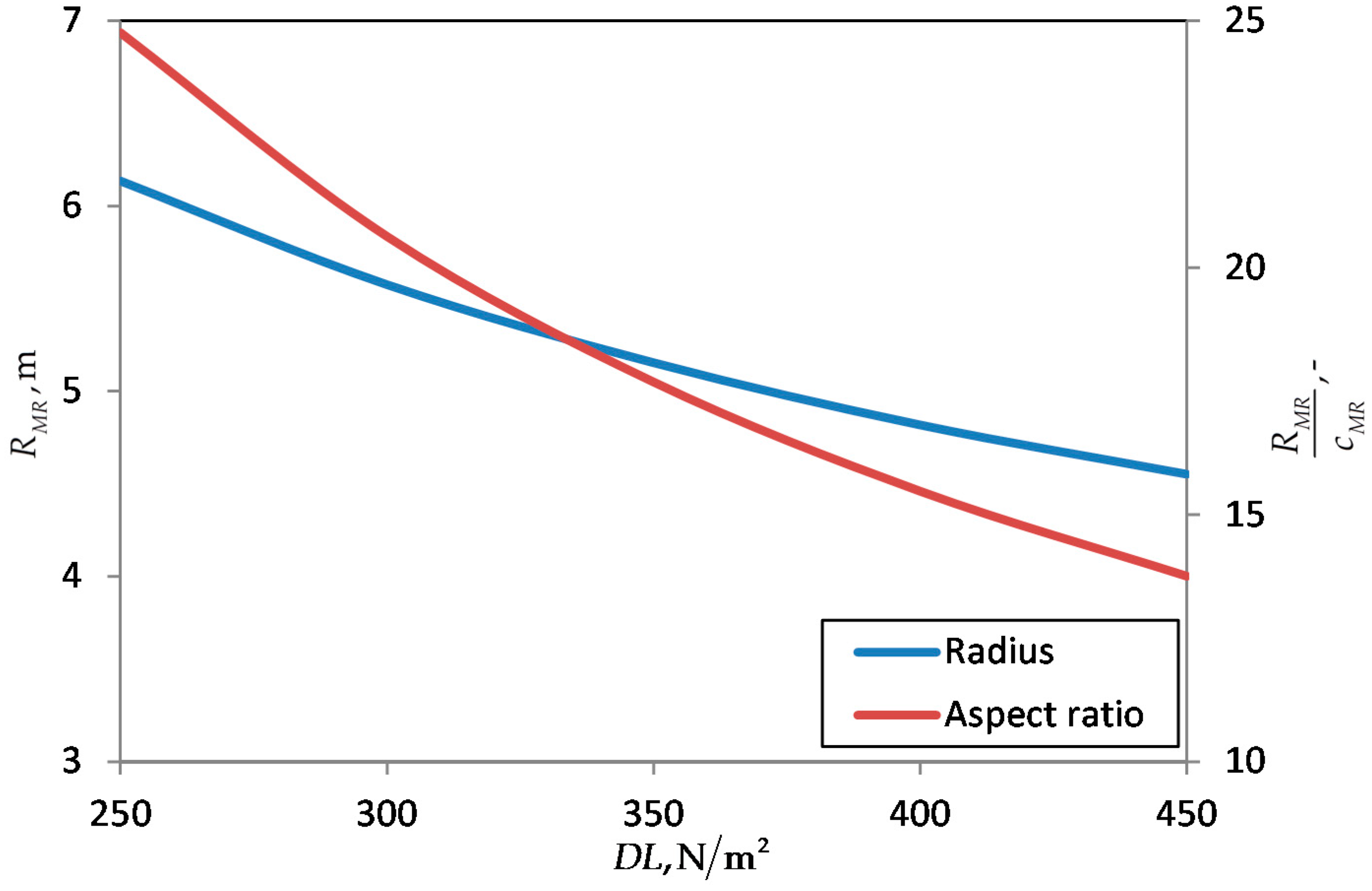
5.3. Variation of Design Parameters
6. Preliminary Design of the Fuselage Structure
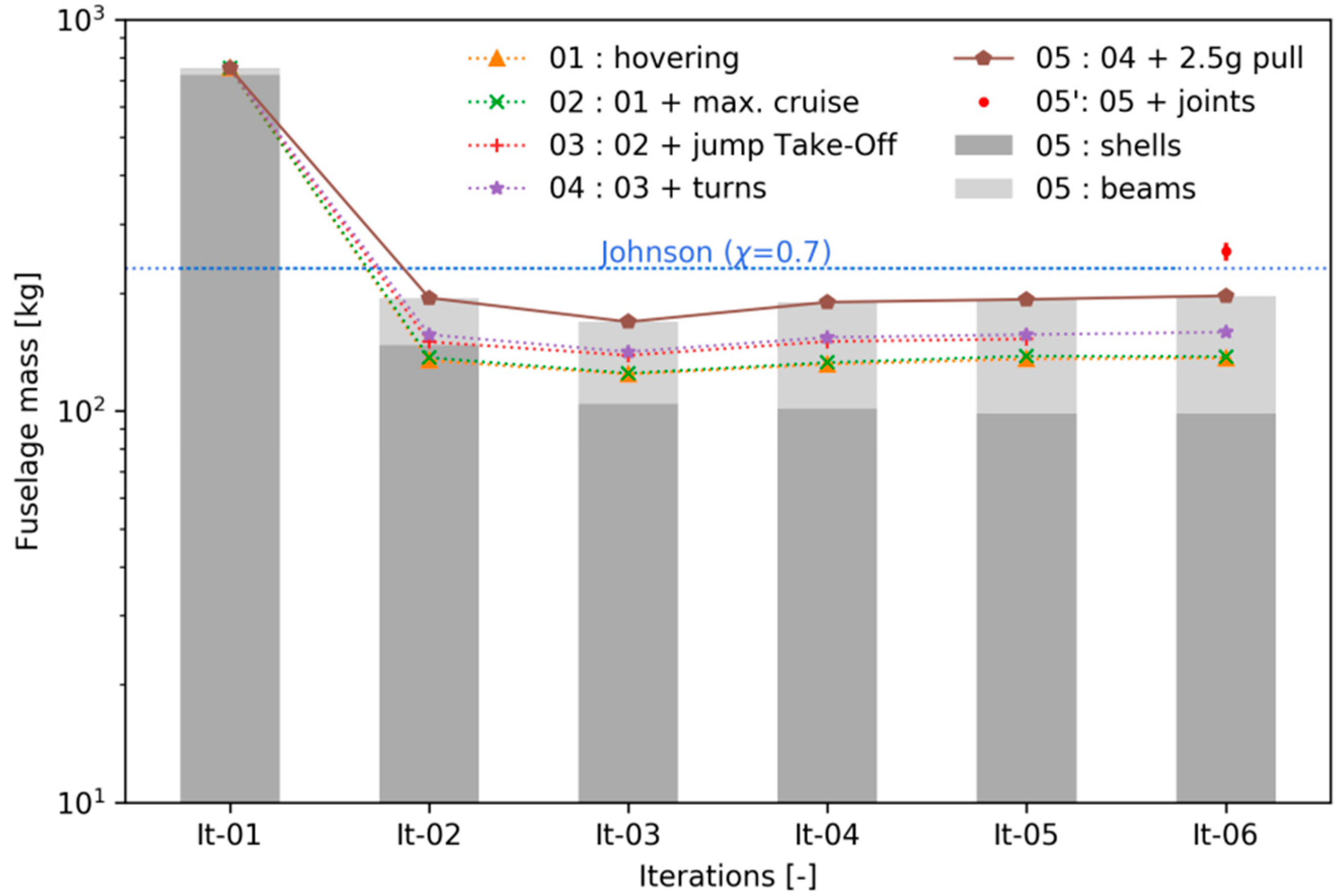
6.1. Computational Mass Estimation
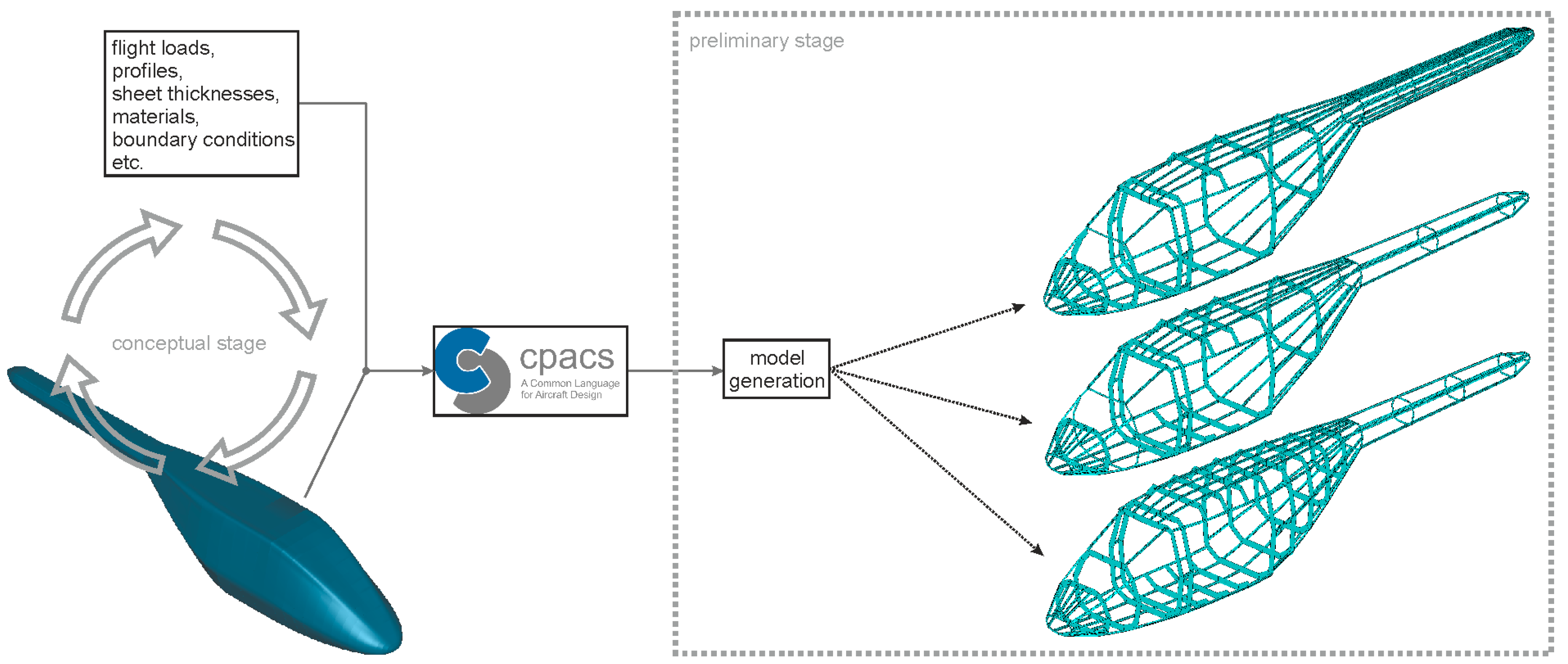
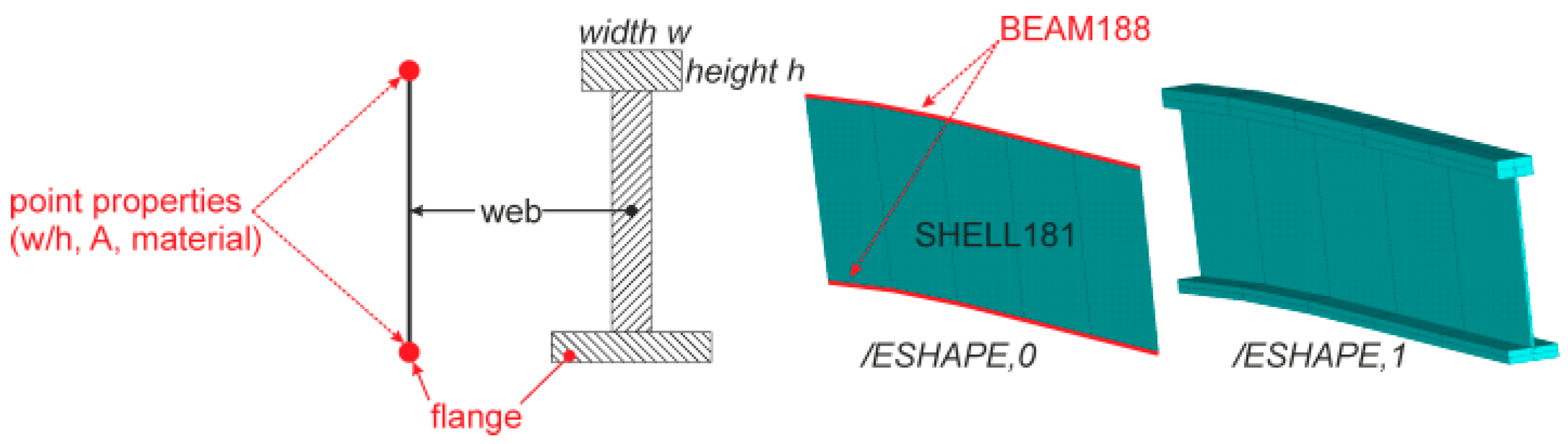
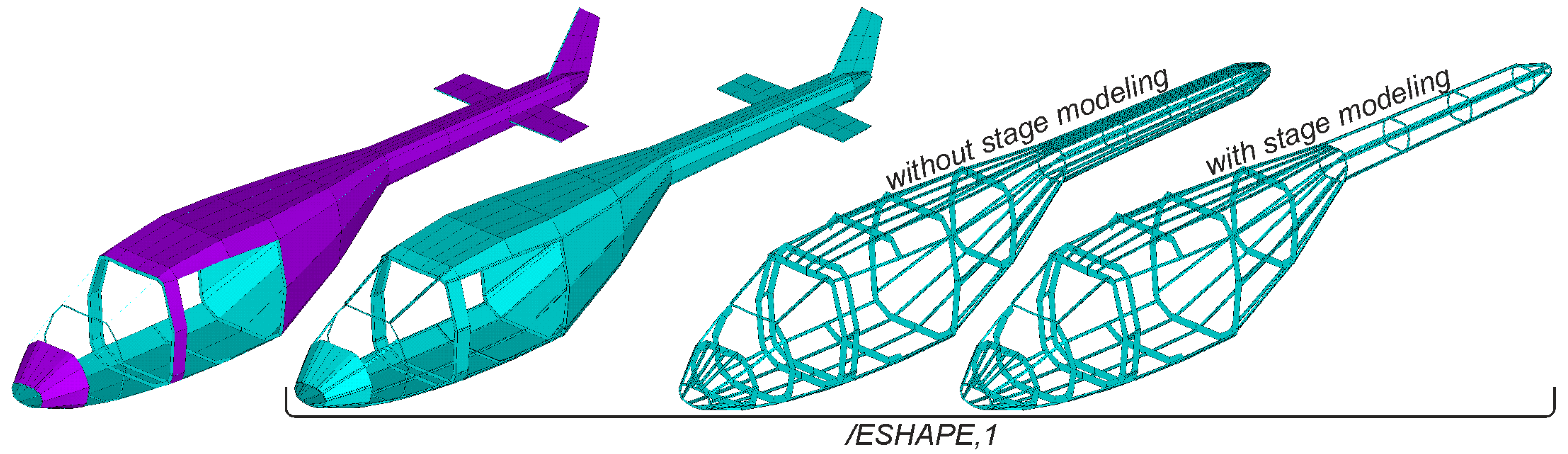
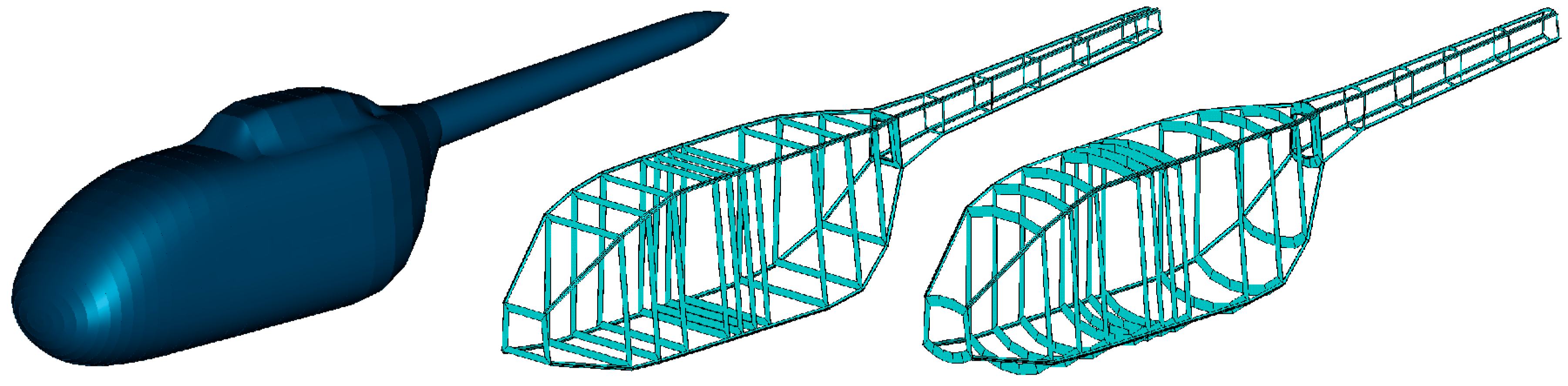
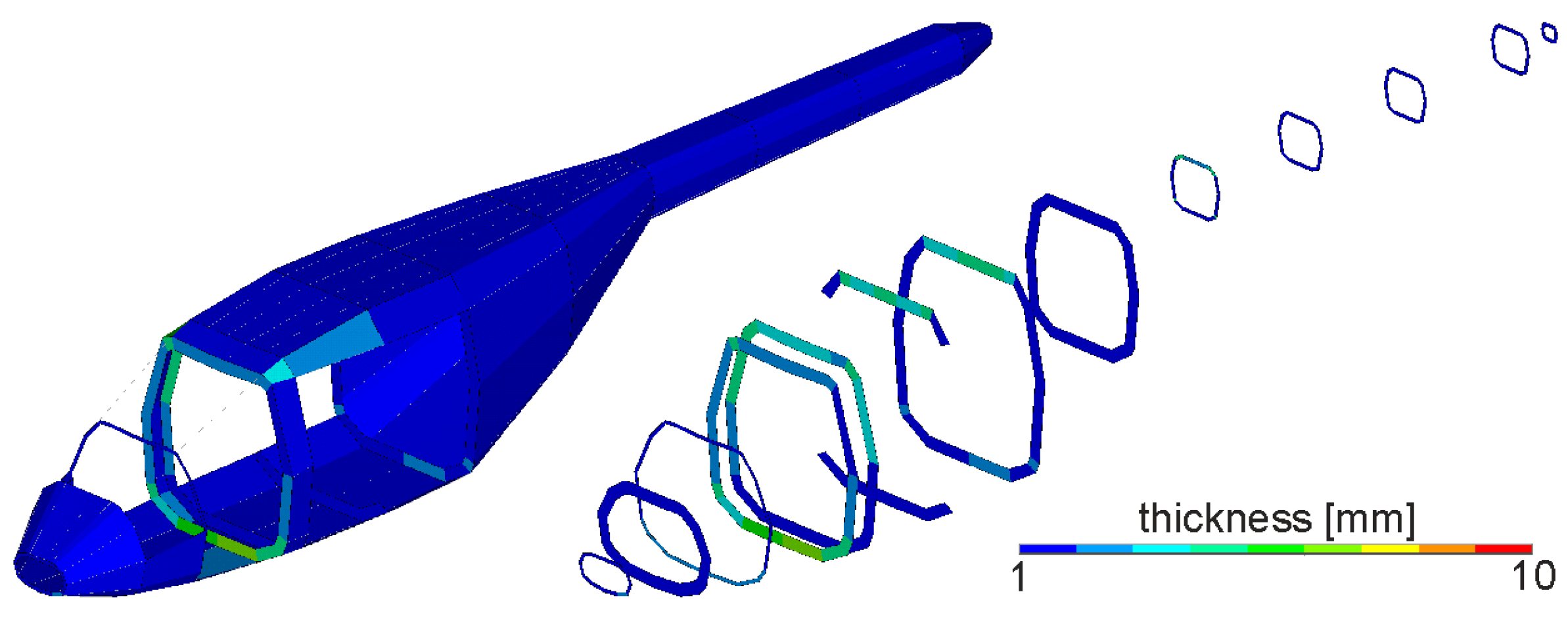
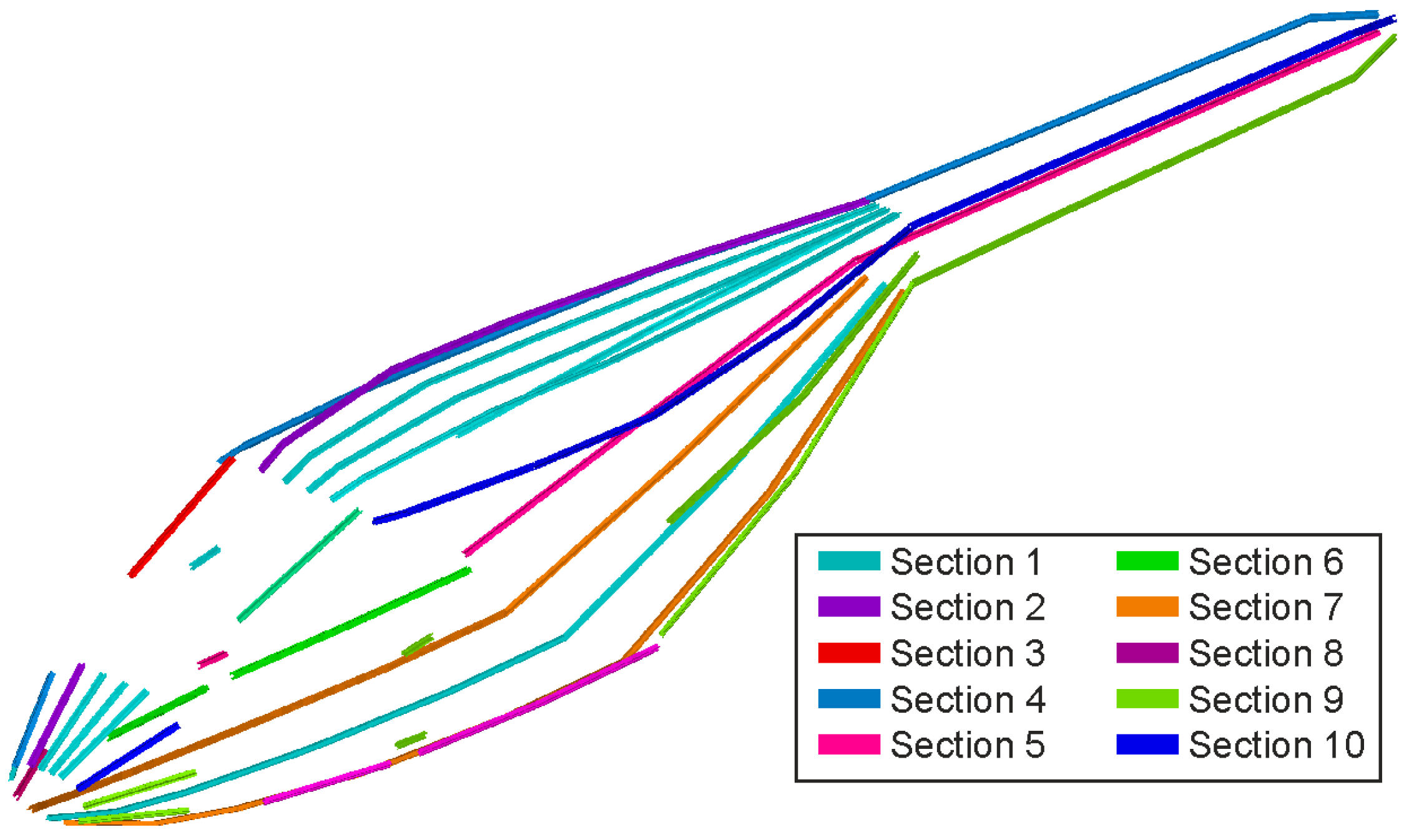
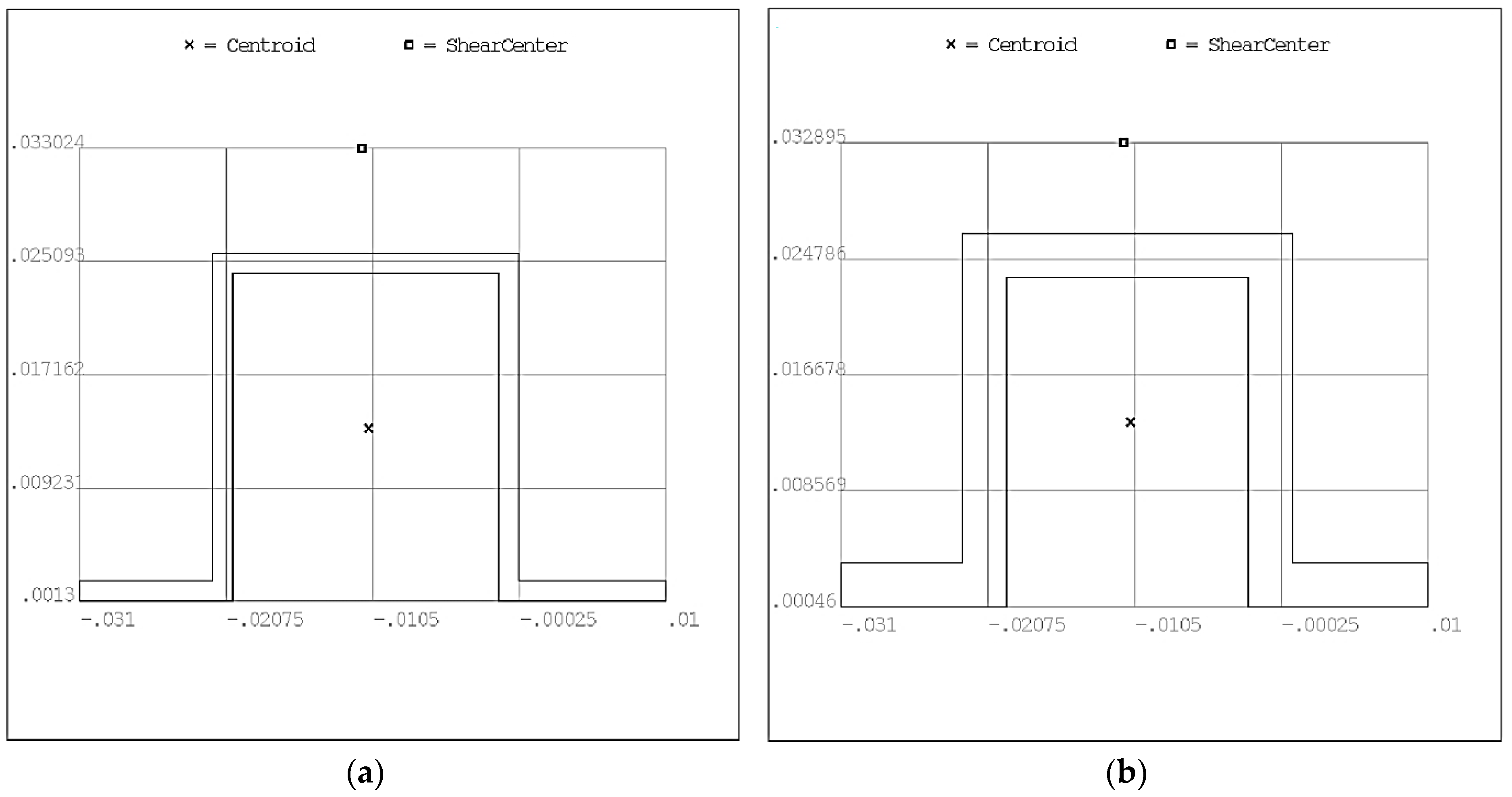
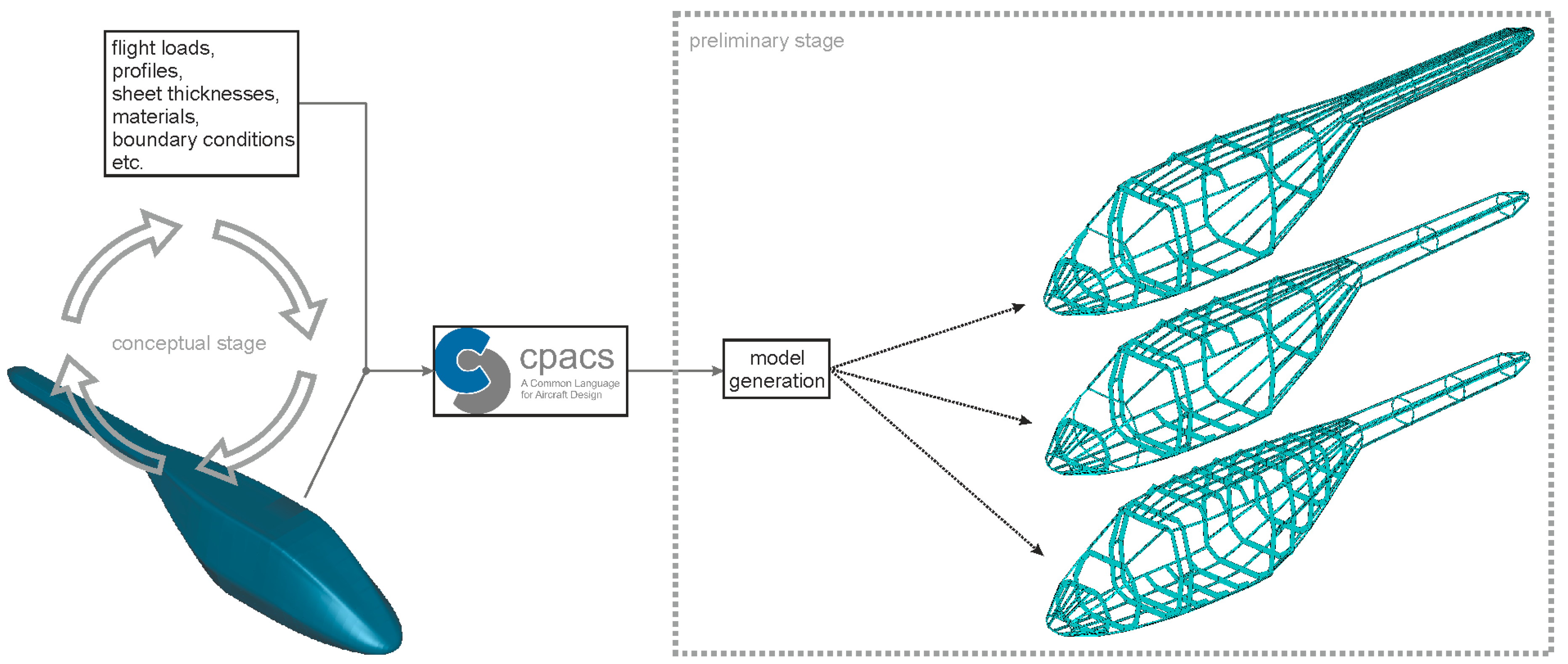
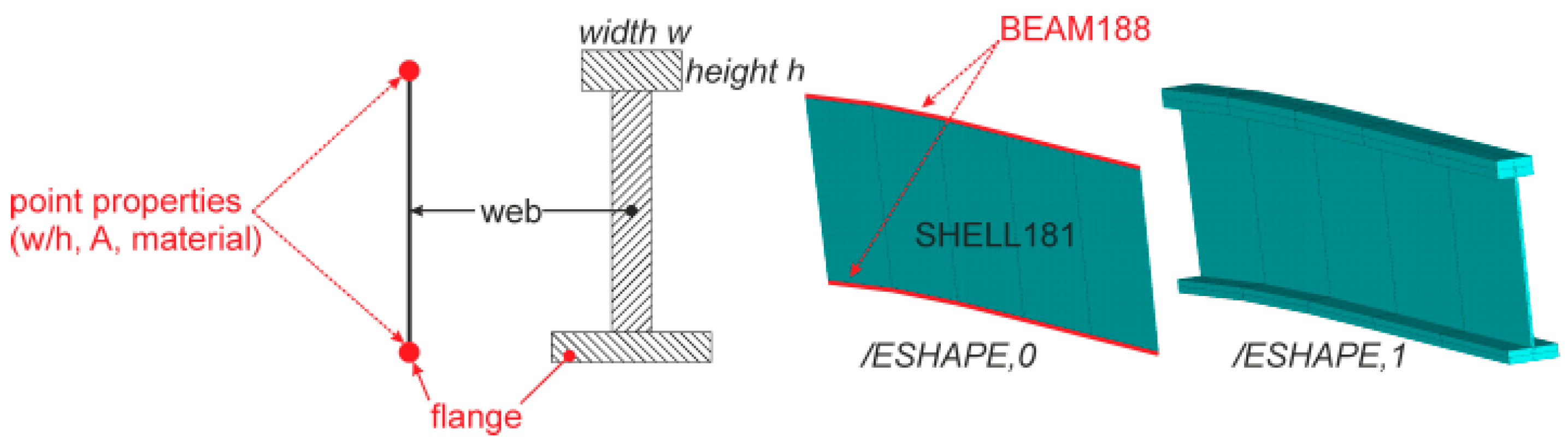
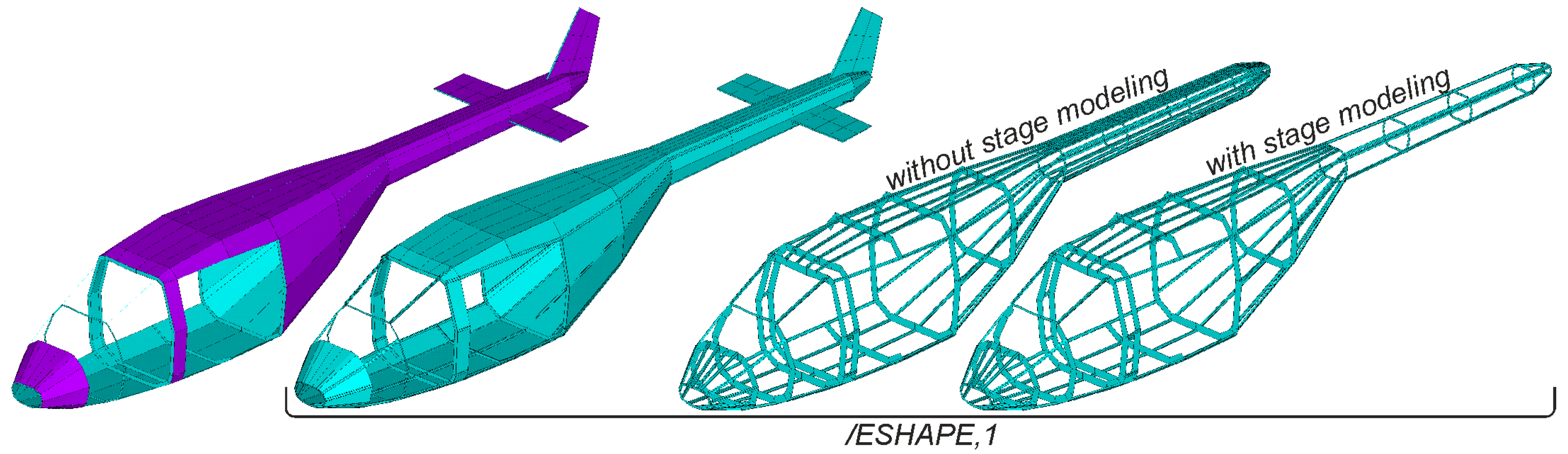
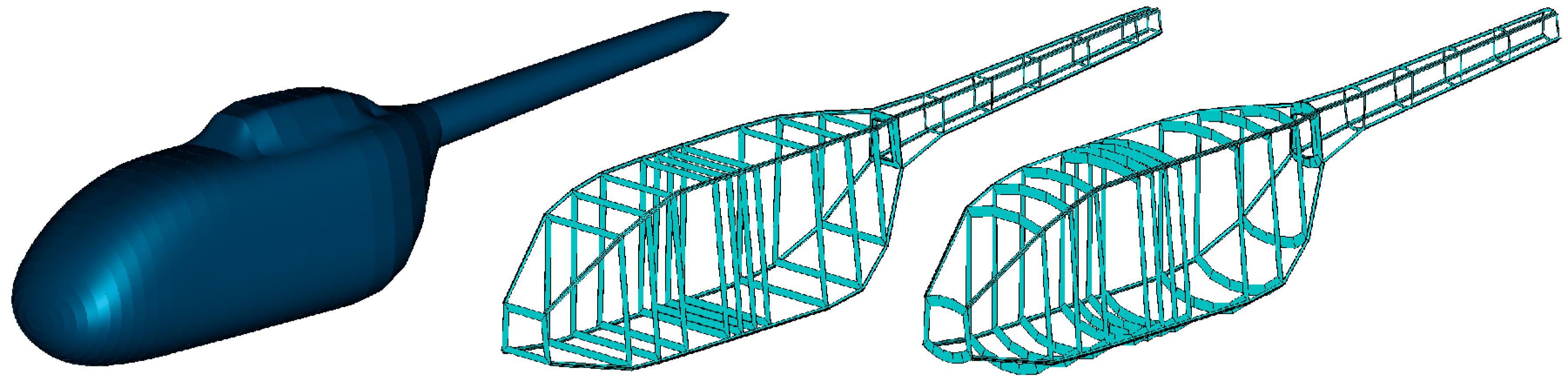
6.2. Model Generation
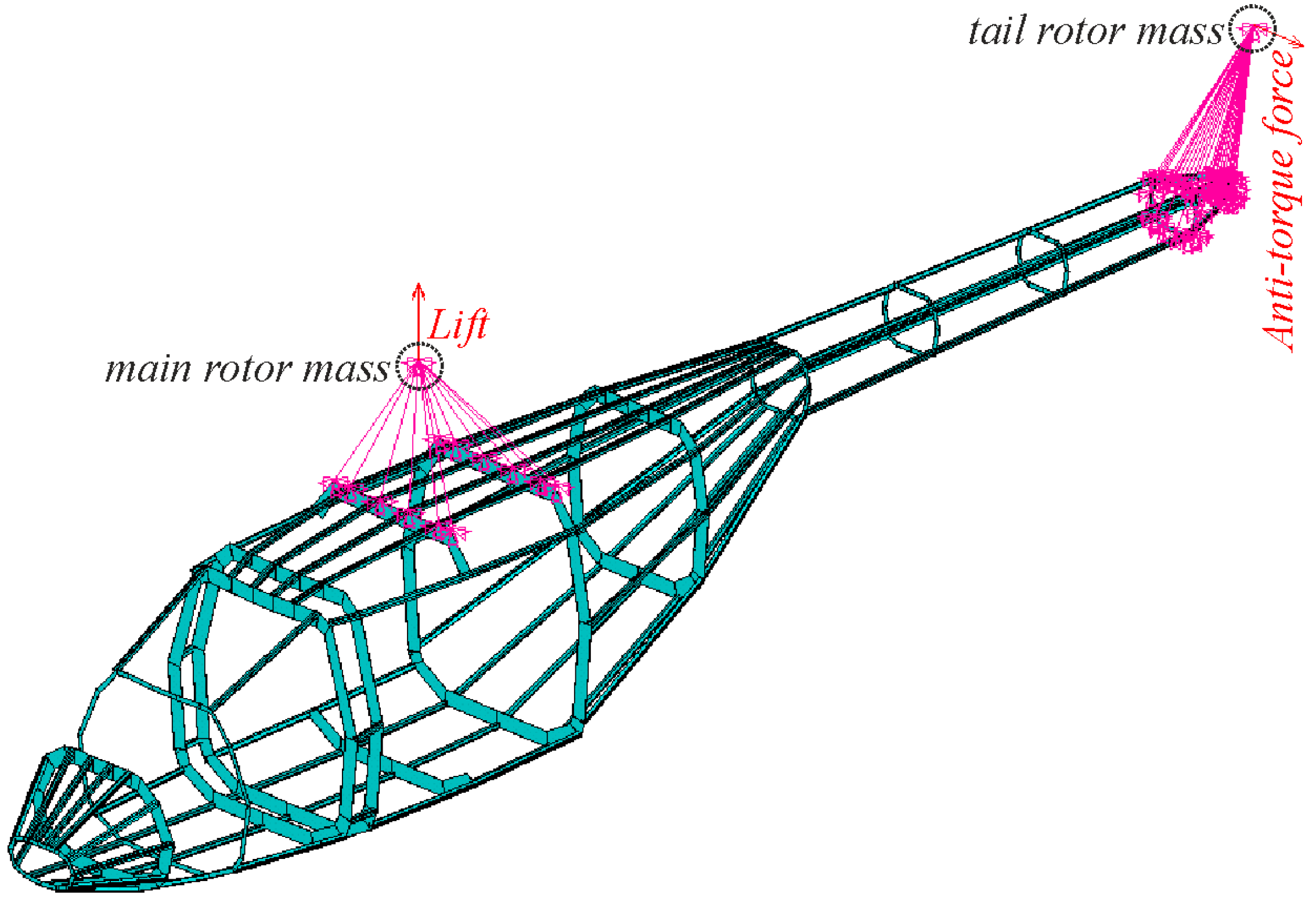
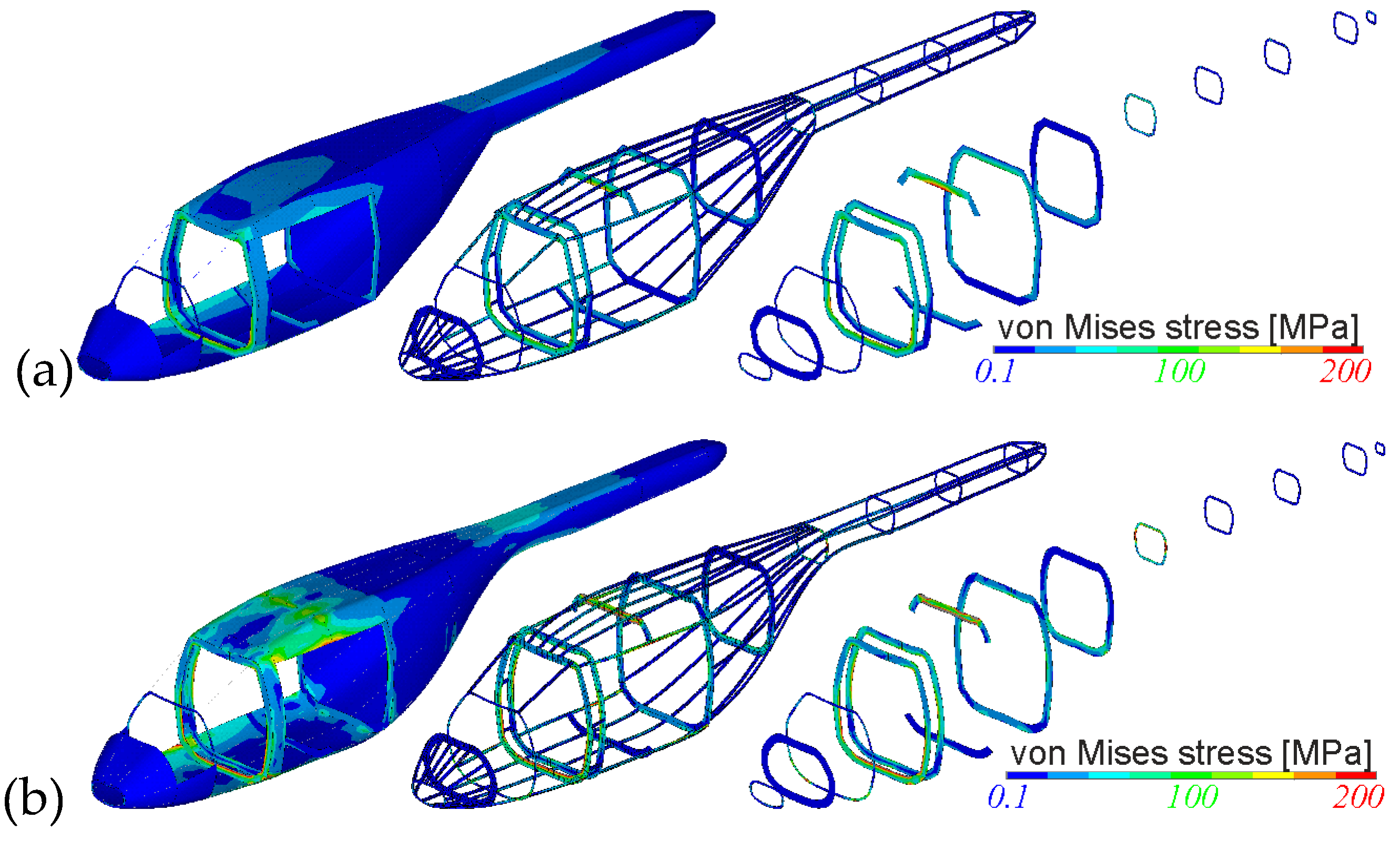
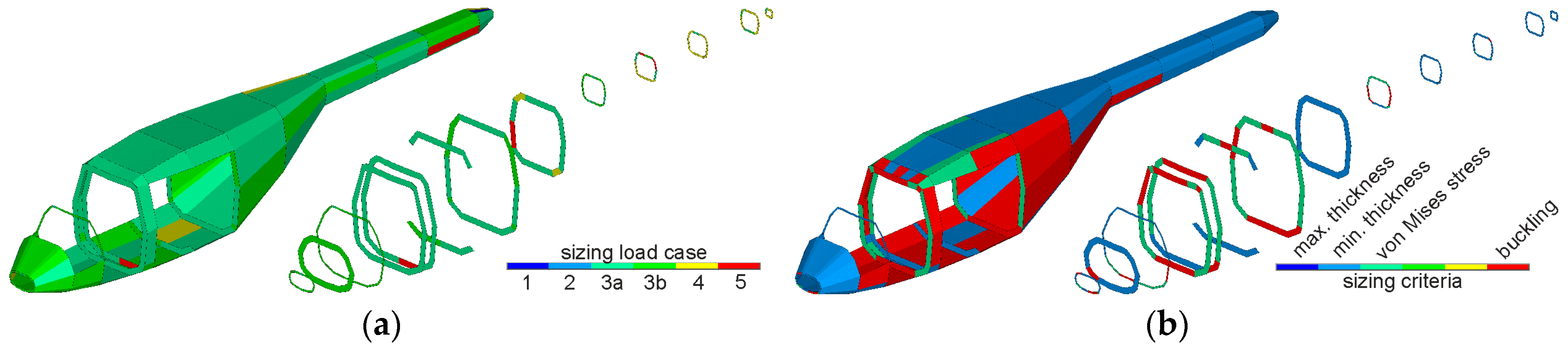
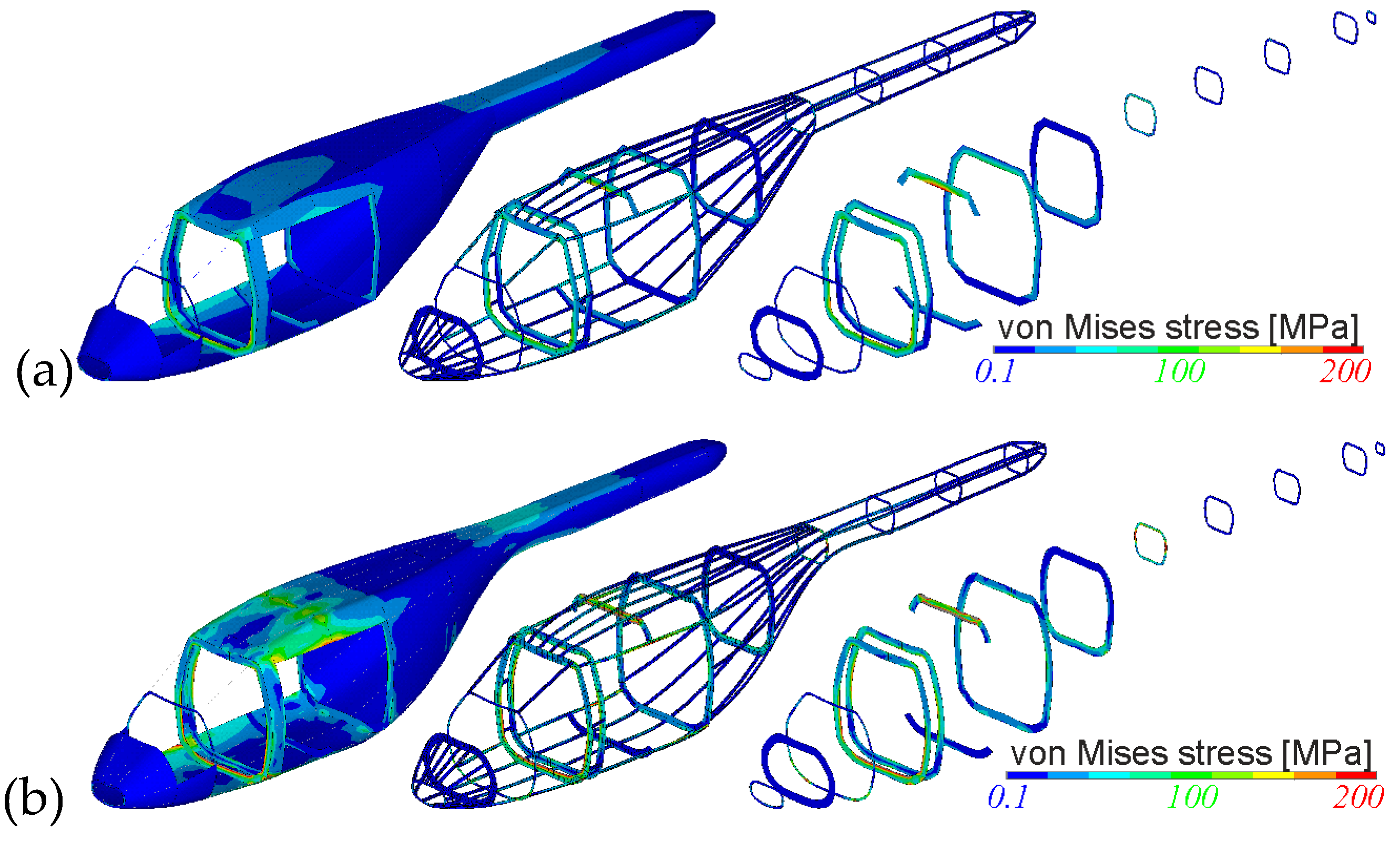
6.3. Static Analysis
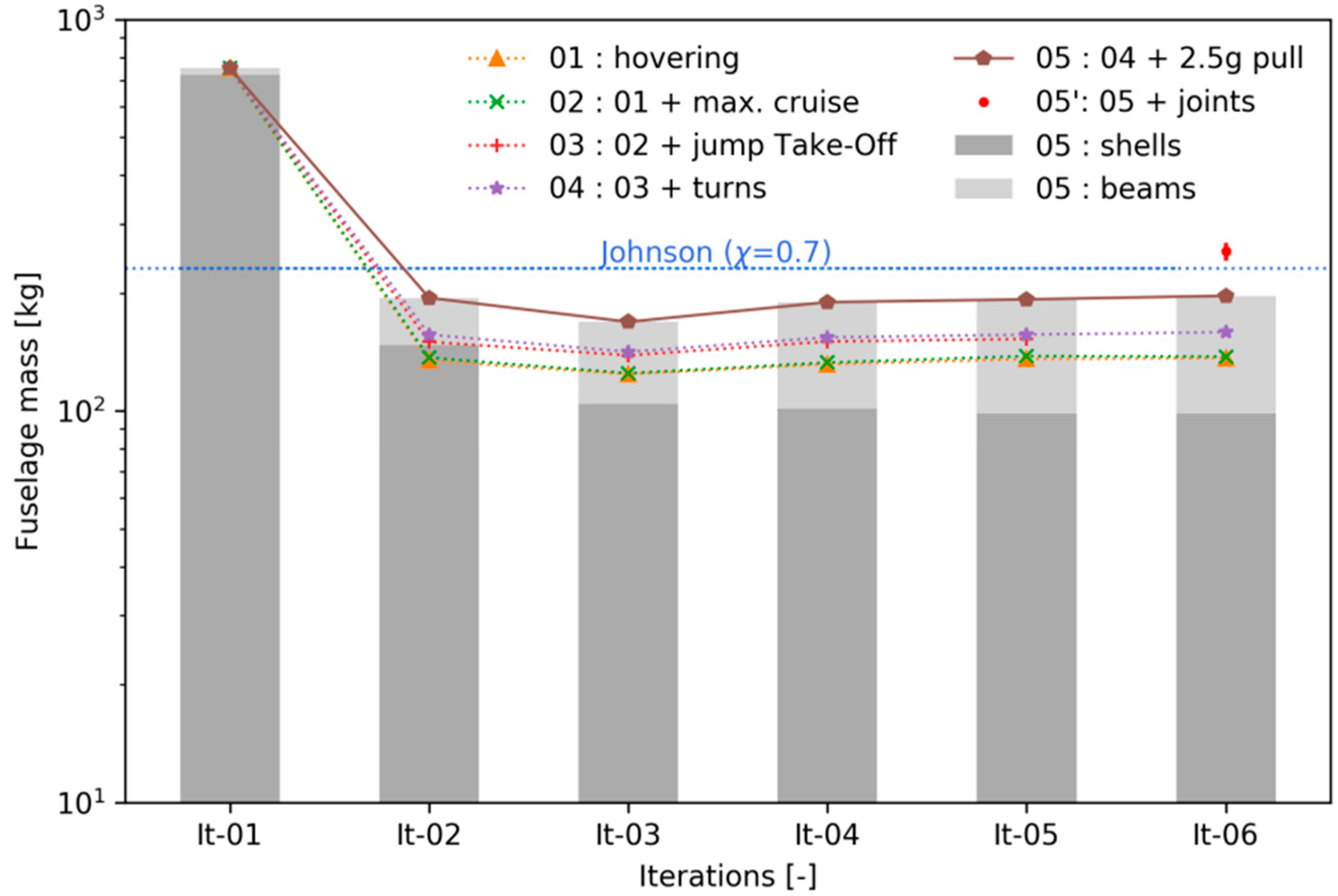
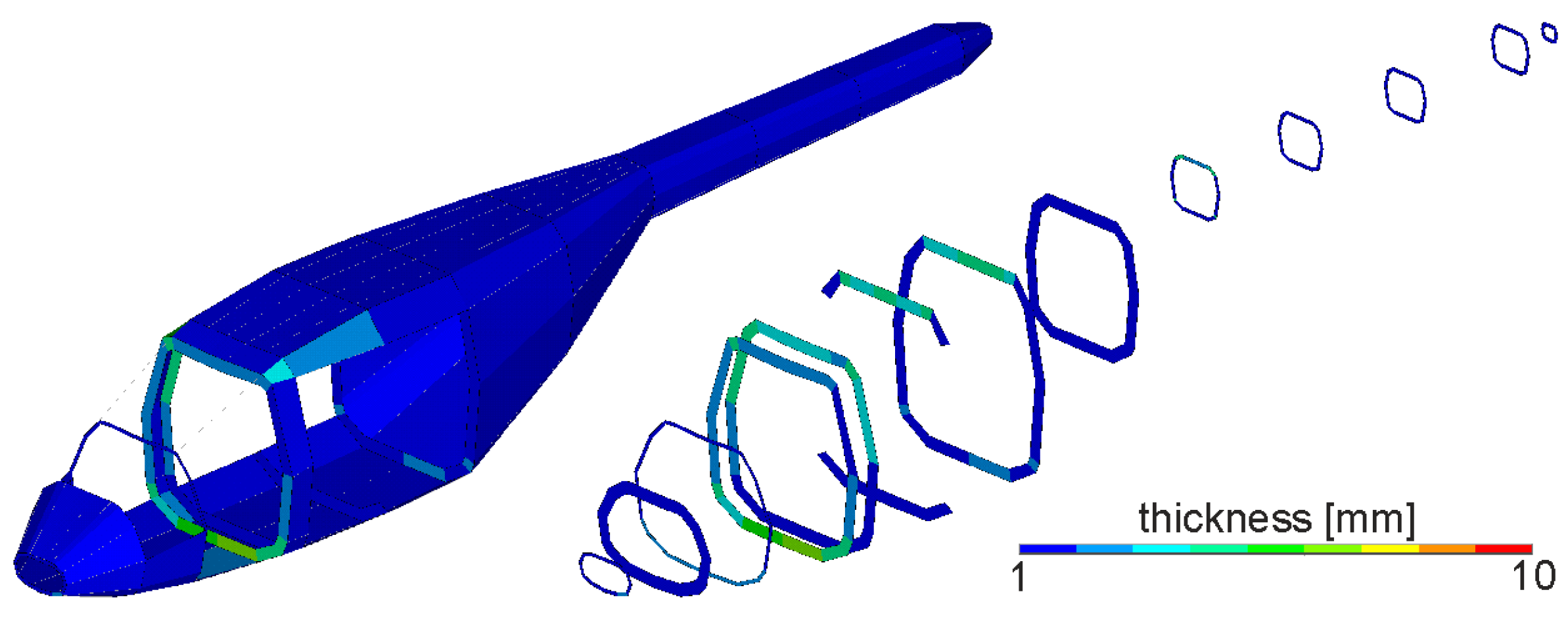
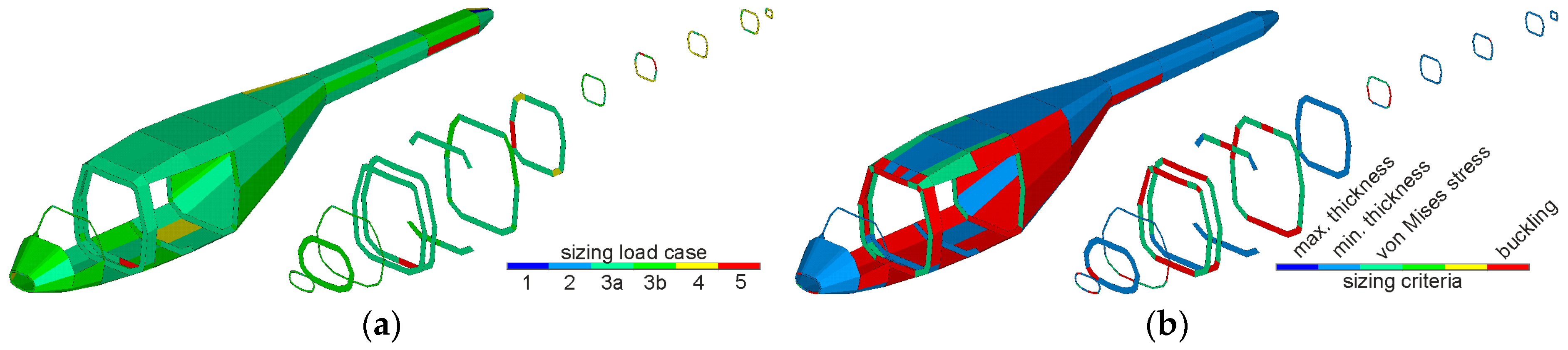
6.4. Sizing Approach
7. Summary
7.1. Lessons Learnt
- The design environment needs certain breakpoint between the different computational levels. These give the engineer the opportunity to check consistency of the virtual configuration under investigation.
- Last design studies have proven the general feasibility of integration a flight simulation tool, like HOST in the present case into the design environment. However, a reliable integration of such an extensive tool is a great effort. Numerous extensions have to be implemented, for instance the stepwise approach of the velocity to the trim point, in order to ensure reliable computation in batch-mode and convergence of the trim algorithm.
- In the first approach the calculation of the aerodynamic coefficients was conducted inside the level 1 sizing loop. This could also take into account the minor changes of fuselage length. Otherwise the panel method exhibited irregular problems by predicting and handling the area of separated flow on the rear part of fuselage. The computation of the longitudinal force showed a good agreement with reference data from different flight simulation models, but the moment coefficient around all three axes showed errors compromising the trim and performance calculation.
- At the beginning the tool levels were classified by the characteristics of accuracy or uncertainties and computation time. The amount of required input showed to be proportional to the computation time and was added in the next step. Finally, the robustness was added proportional to the uncertainties. The evaluation of the latter showed to be not less important, sometimes even more important than the other three characteristics.
- Applying a uniform data model for every tool leads, sooner or later, to the problem of redundant data, which is an inherent source of errors. The tool specific data in the CPACS model allows the storage of temporary data for every tool. There is still intermediate data which is subsequently processed by other tools. Due to the fact that this data is valid but not final it has to be stored at a different process specific location for temporary data. One example for such data are the dimensions of the fuselage components that are required for the generation of the 3D geometry model.
7.2. Conclusions and Outlook
- A high grade of modularity allowing an easy integration, rearrangement and coupling of tools. Now it is an easy task to build different workflows for rotorcraft design including tools developed by different partners and located on different servers.
- The sizing task and especially the flight performance computation is conducted with a sophisticated level of fidelity due to the integration of the higher fidelity overall simulation tool HOST into the workflow. Now the sizing task and the comprehensive analysis are using the same codes for computation. This results in a considerable reduction of uncertainties.
- The integration of the uniform data model CPACS in connection with the collaboration software RCE into the design environment allows an unlimited change between different levels of design. This virtually merges the phase of conceptual design with a wide range of the preliminary design phase. The ability to couple the conceptual design with a variety of comprehensive analysis tools for optimization is now available and outperforms the previous approaches.
- The second benefit in the harmonization with the CPACS data model is the easy coupling of the workflows with workflows of other institutes also using CPACS, which, however, are not integrated into the rotorcraft design project. This DLR doctrine allows the bringing together of independently working projects.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbols | |
| Main rotor disc area, m2 | |
| Moment coefficients around x, y; z axis, - | |
| Lift slope of an airfoil section, - | |
| Thrust coefficient, - | |
| Force coefficients in x; y; z direction, - | |
| Main rotor blade mean chord length, m | |
| Main rotor Disc loading, N/m2 | |
| Weight force at max. take-off mass, N | |
| Gravitational acceleration, m/s2 | |
| Flapping moment of inertia, kg m2 | |
| Fuselage length, m | |
| Basic empty mass, kg | |
| Equipment mass, kg | |
| Fuel mass, kg | |
| Maximum take-off mass, kg | |
| Operator mass, kg | |
| Payload mass, kg | |
| Propulsion subcomponent mass, kg | |
| Specific mission mass, kg | |
| Structural subcomponent mass, kg | |
| Systems subcomponent mass, kg | |
| Number of blades per main rotor, - | |
| Ideal Power, W | |
| Installed Power, W | |
| Blade radius main rotor, tail rotor, m | |
| Flight range, m | |
| Main rotor thrust force, N | |
| Thickness, mm | |
| Horizontal flight speed | |
| Main rotor tip speed, m/s | |
| Lock number of the main rotor blades, - | |
| Air density, kg/m3 | |
| Rotor solidity of main rotor, tail rotor, - | |
| Equivalent stress, MPa | |
| Pitch, roll and yaw angle, ° | |
| Angular speed of main rotor, rad/s | |
| Abbreviations | |
| ACT/FHS | Advanced Control Technology/Flying Helicopter Simulator |
| AFDD | U.S. Army Aeroflightdynamics Directorate |
| CAMRAD II | Comprehensive Analytical Model of Rotorcraft Aerodynamics and Dynamics |
| CPACS | Common Parametric Aircraft Configuration Schema |
| CREATION | Concepts of Rotorcraft Enhanced |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt (German Aerospace Center) |
| IRIS | Integrated Rotorcraft Initial Sizing |
| HEMS | Helicopter Emergency Medical Service |
| HOST | Helicopter Overall Simulation Tool |
| MDO | Multidisciplinary Design and Optimization |
| NDARC | NASA Design and Analysis of Rotorcraft |
| ONERA | Office national d’études et de recherches aérospatiales (The French Aerospace Lab) |
| RCE | Remote Component Environment |
| TLAR | Top Level Aircraft Requirements |
| TRIAD | Technologies for Rotorcraft in Integrated and Advanced Design |
References
- Raymer, D.P. Aircraft Design. A Conceptual Approach, 5th ed.; AIAA Education Series; AIAA American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012. [Google Scholar]
- Johnson, W. NDARC—NASA Design and Analysis of Rotorcraft; NASA/TP–2009-215402; Ames Research Center: Moffett Field, CA, USA, 2009.
- Sinsay, J.D. Re-imagining Rotorcraft Advanced Design. In Proceedings of the Rotorcraft Virtual Engineering Conference, Liverpool, UK, 8–10 November 2016. [Google Scholar]
- Johnson, W.; Moodie, A.M.; Yeo, H. Design and Performance of Lift-Offset Rotorcraft for Short-Haul Missions; American Helicopter Society Future: San Francisco, CA, USA, 2012. [Google Scholar]
- Lawrence, B. Handling Qualities Optimization for Rotorcraft Conceptual Design. In Proceedings of the Rotorcraft Virtual Engineering Conference, Liverpool, UK, 8–10 November 2016. [Google Scholar]
- Basset, P.-M.; Tremolet, A.; Cuzieux, F.; Reboul, G.; Costes, M.; Tristrant, D.; Petot, D. CREATION the Onera Multi-Level Rotorcraft Concepts Evaluation Tool: The Foundations. In Proceedings of the Future Vertical Lift Aircraft Design Conference, San Francisco, CA, USA, 18–20 January 2012. [Google Scholar]
- Russell, C.; Basset, P.-M. Conceptual Design of Environmentally Friendly Rotorcraft—A Comparison of NASA and ONERA Approaches. In Proceedings of the AHS 71st Annual Forum, Virginia Beach, VA, USA, 5–7 May 2015. [Google Scholar]
- Boer, J.-F.; Stevens, J. Helicopter Life Cycle Cost reduction through pre-design optimisation. In Proceedings of the 32nd European Rotorcraft Forum, Maastricht, NL, USA, 12 September 2006. [Google Scholar]
- Weiand, P.; Krenik, A. A multi-disciplinary toolbox for rotorcraft design. Aeronaut. J. 2018, 122, 620–645. [Google Scholar] [CrossRef]
- Nicolai, L.M.; Carichner, G.E. Fundamentals of Aircraft and Airship Design; AIAA Education Series; AIAA American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2010. [Google Scholar]
- Roskam, J. Airplane Cost estimation. Design, Development, Manufacturing and Operating, 3rd ed.; Roskam Aviation and Engineering Corporation: Lawrence, KS, USA, 2006. [Google Scholar]
- Layton, D.M. Introduction to Helicopter Design; AIAA Professional Studies Series; AIAA: Salinas, CA, USA, 1992. [Google Scholar]
- Liersch, C.M.; Hepperle, M. A distributed toolbox for multidisciplinary preliminary aircraft design. CEAS Aeronaut. J. 2011, 2, 57–68. [Google Scholar] [CrossRef]
- Liersch, C.M.; Huber, K.C. Conceptual Design and Aerodynamic Analyses of a Generic UCAV Configuration. In Proceedings of the 32nd AIAA Applied Aerodynamics Conference, Atlanta, GA, USA, 16 June 2014. [Google Scholar]
- Schwinn, D.; Weiand, P.; Schmid, M.; Buchwald, M. Structural sizing of a rotorcraft fuselage using an integrated design approach. In Proceedings of the 31th Congress of the International Council of the Aeronautical Sciences, Belo Horizonte, Brazil, 9–14 September 2018. [Google Scholar]
- Bachmann, A.; Kunde, M.; Litz, M.; Schreiber, A. Advances in Generalization and Decoupling of Software Parts in a Scientific Simulation Workflow System. In Proceedings of the 4th International Conference on Advanced Engineering Computing and Applications in Sciences—ADVCOMP 2010, Florence, Italy, 25–30 October 2010. [Google Scholar]
- Seider, D.; Fischer, P.M.; Litz, M.; Schreiber, A.; Gerndt, A. Open Source Software Framework for Applications in Aeronautics and Space. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3 March 2012. [Google Scholar]
- Böhnke, D.; Litz, M.; Rudolph, S. Evaluation of Modeling Languages for Preliminary Airplane Design in Multidisciplinary Design Environments. In Proceedings of the 2010 Deutscher Luft-und Raumfahrtkongress, Hamburg, Germany, 31 August–3 September 2010. [Google Scholar]
- Nagel, B.; Böhnke, D.; Gollnick, V.; Schmollgruber, P.; Rizzi, A.; La Rocca, G.; Alonso, J.J. Communication in Aircraft Design: Can we establish a common language? In Proceedings of the 28th International Congress of the Aeronautical Science, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Benoit, B.; Dequin, A.-M.; Kampa, K.; Grünhagen, W.; von Basset, P.-M.; Gimonet, B. HOST, a General Helicopter Simulation Tool for Germany and France. In Proceedings of the American Helicopter Society 56th Annual Forum, Virginia Beach, VA, USA, 2–4 May 2000. [Google Scholar]
- Van der Wall, B.G. Grundlagen der Hubschrauber-Aerodynamik, 1st ed.; VDI-Buch; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Kunze, P. Parametric Fuselage Geometry Generation and Aerodynamic Performance Prediction in Preliminary Rotorcraft Design. In Proceedings of the 39th European Rotorcraft Forum, Moscow, Russia, 3–6 September 2013. [Google Scholar]
- Maskew, B. Program VSAERO Theory Document—NASA CR-4023; NASA: Redmond, WA, USA, 1987.
- Keys, C.N.; Wiesner, R. Guidelines for Reducing Helicopter Parasite Drag. J. Am. Helicopter Soc. 1975, 20, 31–40. [Google Scholar] [CrossRef]
- Stepniewski, W.Z. Rotary-Wing Aerodynamics. In Dover Books on Aeronautical Engineering; Dover Publications: Newburyport, MA, USA, 2013. [Google Scholar]
- Krenik, A.; Weiand, P. Aspects on Conceptual and Preliminary Helicopter Design. In Proceedings of the 2016 Deutscher Luft-und Raumfahrtkongress, Braunschweig, Germany, 13–15 September 2016. [Google Scholar]
- Beltramo, M.N.; Morris, M.A. Parametric Study of Helicopter Aircraft Systems Costs and Weights—NASA-CR-152315; NASA: Moffett Field, CA, USA, 1980.
- Palasis, D. Erstellung eines Vorentwurfsverfahrens für Hubschrauber Mit Einer Erweiterung für das Kipprotorflugzeug; VDI-Verlag: Düsseldorf, Germany, 1992; Volume 201. [Google Scholar]
- Prouty, R.W. Helicopter Performance, Stability, and Control; Krieger: Malabar, FL, USA, 2005. [Google Scholar]
- Kaletka, J.; Kurscheid, H.; Butter, U. FHS, the new research helicopter: Ready for service. Aerosp. Sci. Technol. 2005, 9, 456–467. [Google Scholar] [CrossRef]
- Hunter, E. A Process Enabling High Fidelity Airframe Sizing and Optimization for Conceptual Design. In Proceedings of the 49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Schaumburg, IL, USA, 7 April 2008. [Google Scholar]
- Shanley, F.R. Weight-Strength Analysis of Aircraft Structures, 2nd ed.; Dover Publ: New York, NY, USA, 1960. [Google Scholar]
- Schwinn, D.B. Applied parametrized and automated airframe modeling methods in the preliminary design phase. Int. J. Model. Simul. Sci. Comput. 2015, 6, 1550037. [Google Scholar] [CrossRef]
- Nagel, B.; Kintscher, M.; Streit, T. Active and Passive Structural Measure for Aedrolastic Winglet. In Proceedings of the 26th International Congress of the Aeronautical Sciences, Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Scherer, J.; Kohlgrüber, D.; Dorbath, F.; Sorour, M. A Finite Element Based Tool Chain for Structural Sizing of Transport Aircraft in Preliminary Aircraft Design. In Proceedings of the 2013 Deutscher Luft-und Raumfahrtkongress, Stuttgart, Germany, 10–12 September 2013. [Google Scholar]
- Schwinn, D.; Weiand, P.; Schmid, M. Structural Analysis of a Rotorcraft Fuselage in a Multidisciplinary Environment. In Proceedings of the NAFEMS World Congress, Stockholm, Sweden, 11–14 June 2017. [Google Scholar]
- Bruhn, E.F. Analysis and Design of Flight Vehicle Structures; Jacobs Publishing: Indianapolis, IN, USA, 1973. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type of Parameter | Unit |
|---|---|---|
| Specific mission mass | real | kg |
| Cruise speed | real | m/s |
| Range | real | m |
| Number of main rotor blades | integer | - |
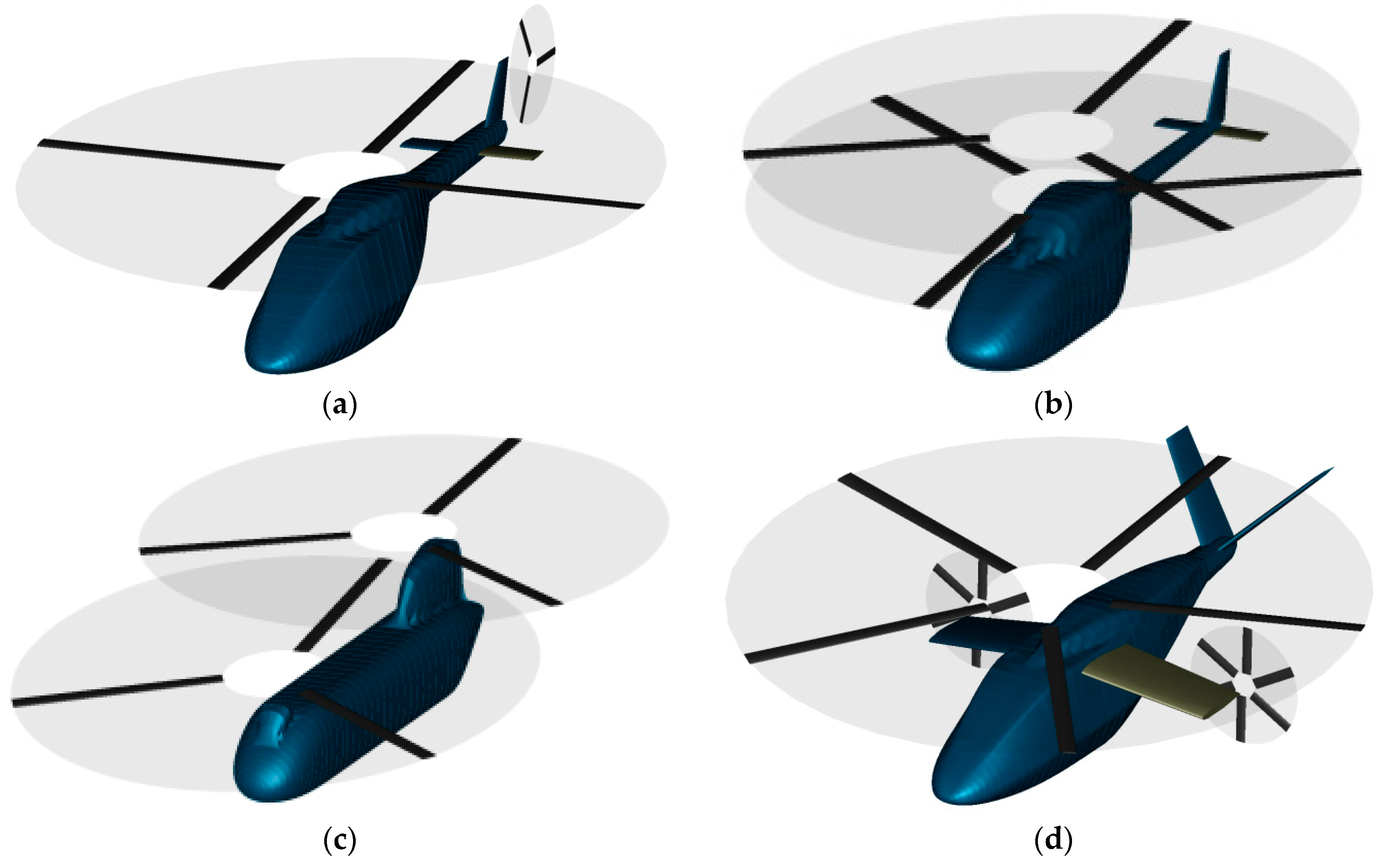
| Main rotor arrangement | text | - |
| Name | Type of Parameter | Unit |
|---|---|---|
| cabin height | continuous | m |
| cabin width | continuous | m |
| cabin length | continuous | m |
| cargo hold payload fraction | continuous | - |
| Parameter | Value |
|---|---|
| Payload mass | 809 kg |
| Cruise speed | 65 m/s |
| Range | 615 km |
| Number of main rotor blades | 4 |
| main rotor arrangement | standard |
| Parameter | Value |
|---|---|
| Cabin height | 1.25 m |
| Cabin width | 1.5 m |
| Cabin length | 1.7 m |
| Cargo hold payload fraction | 0.2 |
| Parameter | ACT/FHS Reference | IRIS Virtual | Deviation |
|---|---|---|---|
| 2910 | 2985 | 2.58% | |
| 1544 | 1652 | 6.99% | |
| 557 | 524 | −5.92% | |
| 5.10 | 5.20 | 1.90% | |
| 0.289 | 0.286 | −1.04% | |
| 10.21 | 9.92 | −2.80% | |
| 349 | 345 | −1.22% | |
| 41.4 | 40.40 | −2.29% | |
| 0.072 | 0.070 | −2.68% | |
| 0.089 | 0.091 | 2.38% |
| Mass Component | mcomp, kg |
|---|---|
| Rotor group | 220 |
| Engines | 201 |
| Transmission | 23 |
| Fuselage | 266 |
| Empennage | 15 |
| Landing gear | 131 |
| Nacelle | 44 |
| Air-condition & anti-icing | 17 |
| Auxiliary power | 42 |
| Avionics | 133 |
| Electrics | 130 |
| Flight controls | 55 |
| Fuel system | 55 |
| Furnishing | 193 |
| Hydraulics | 15 |
| Instruments | 48 |
| Load handling | 65 |
| Basic empty mass Σ = | 1652 |
| Parameter | ACT/FHS | 615 km | 700 km | 800 km |
|---|---|---|---|---|
| 2910 | 2985 | 3069 | 3240 | |
| 1544 | 1652 | 1635 | 1694 | |
| 557 | 534 | 624 | 737 | |
| 5.10 | 5.20 | 5.25 | 5.35 | |
| 0.289 | 0.286 | 0.291 | 0.300 | |
| 41.35 | 40.40 | 40.03 | 39.23 | |
| 349 | 345 | 348 | 353 | |
| 0.089 | 0.091 | 0.091 | 0.092 |
| DL | 250 N/m2 | 300 N/m2 | 350 N/m2 | 400 N/m2 | 450 N/m2 |
|---|---|---|---|---|---|
| 3029 | 2999 | 2988 | 2987 | 2996 | |
| 1718 | 1677 | 1653 | 1636 | 1629 | |
| 502 | 513 | 526 | 541 | 558 |
| Parameter | Baseline Vehicle | Hot & High Variation | Deviation |
|---|---|---|---|
| 2988 | 3061 | 2.43% | |
| 1653 | 1705 | 3.14% | |
| 526 | 547 | 3.96% | |
| 5.15 | 5.22 | 1.20% | |
| 0.291 | 0.322 | 10.51% | |
| 40.7 | 40.3 | −1.08% | |
| 0.072 | 0.079 | 9.20% | |
| 0.090 | 0.083 | −8.60% | |
| 0.27 | 0.26 | −2.38% |
| Parameter | Value |
|---|---|
| Young’s modulus [GPa] | 67.7 |
| Density, kg/m3 | 2800 [kg/m3] |
| Poisson’s ration, - | 0.248 |
| Yield strength, MPa | 320 |
| Model Number | Load Case (Added) |
|---|---|
| 01 | Hovering |
| 02 | 01 + maximum cruise velocity |
| 03 | 02 + jump take-off |
| 04 | 03 + turns |
| 05 | 04 + 2.5g pull |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weiand, P.; Buchwald, M.; Schwinn, D. Process Development for Integrated and Distributed Rotorcraft Design. Aerospace 2019, 6, 23. https://doi.org/10.3390/aerospace6020023
Weiand P, Buchwald M, Schwinn D. Process Development for Integrated and Distributed Rotorcraft Design. Aerospace. 2019; 6(2):23. https://doi.org/10.3390/aerospace6020023
Chicago/Turabian StyleWeiand, Peter, Michel Buchwald, and Dominik Schwinn. 2019. "Process Development for Integrated and Distributed Rotorcraft Design" Aerospace 6, no. 2: 23. https://doi.org/10.3390/aerospace6020023
APA StyleWeiand, P., Buchwald, M., & Schwinn, D. (2019). Process Development for Integrated and Distributed Rotorcraft Design. Aerospace, 6(2), 23. https://doi.org/10.3390/aerospace6020023