Hybrid Electric Aircraft Propulsion Case Study for Skydiving Mission



Abstract
:1. Introduction
1.1. Skydiving Lift Mission
1.2. Hybrid Electric Propulsion Suitability
2. Materials and Methods
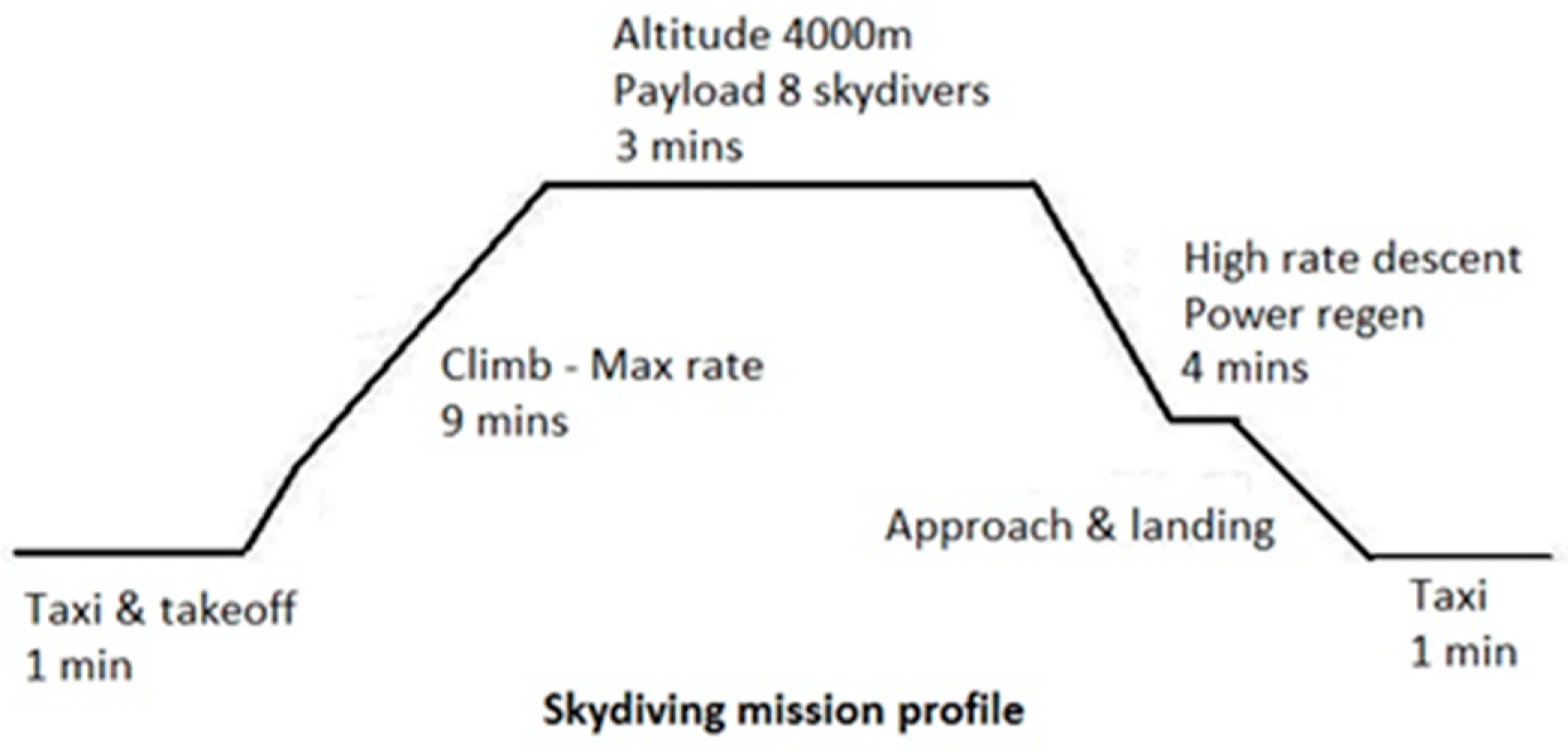
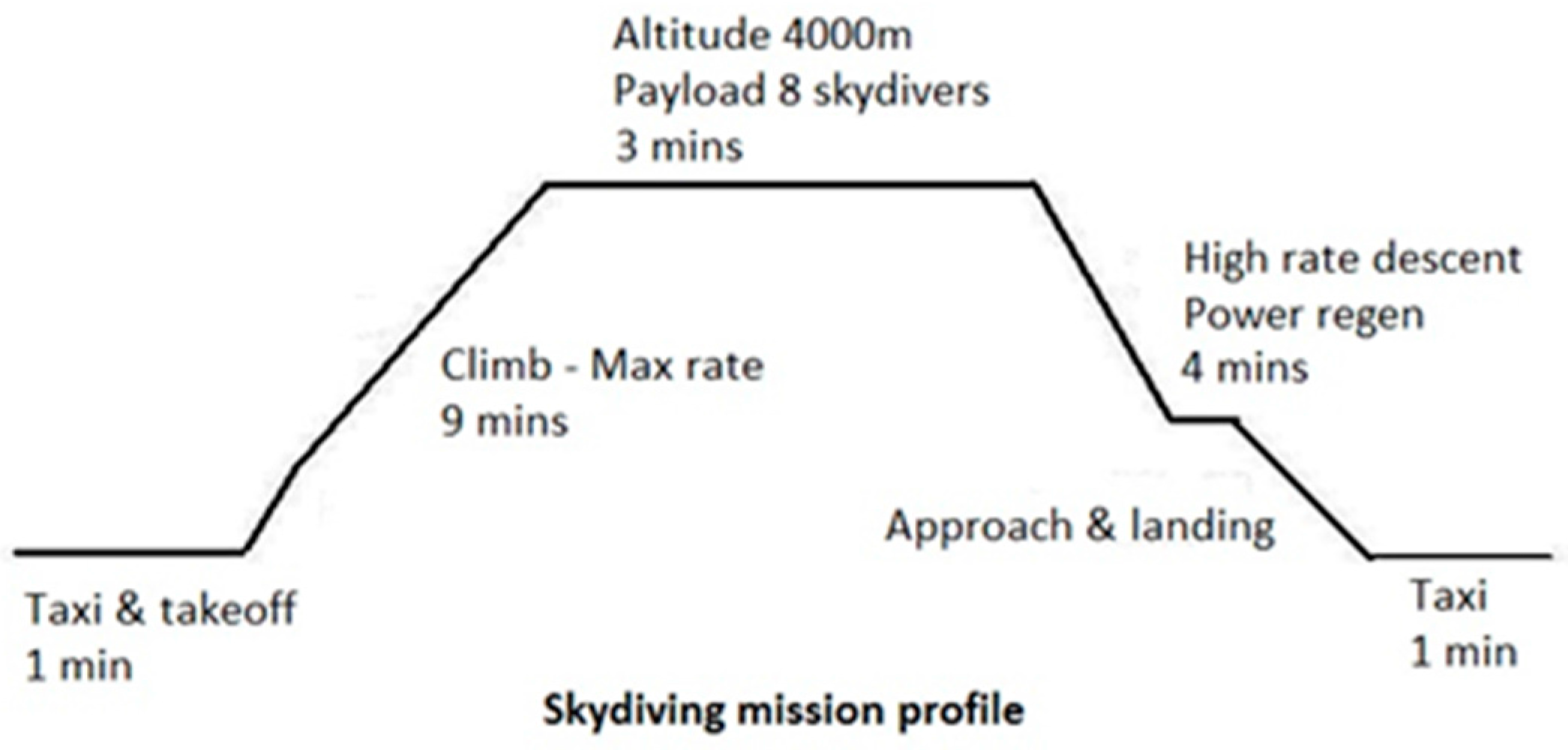
2.1. Mission Profile
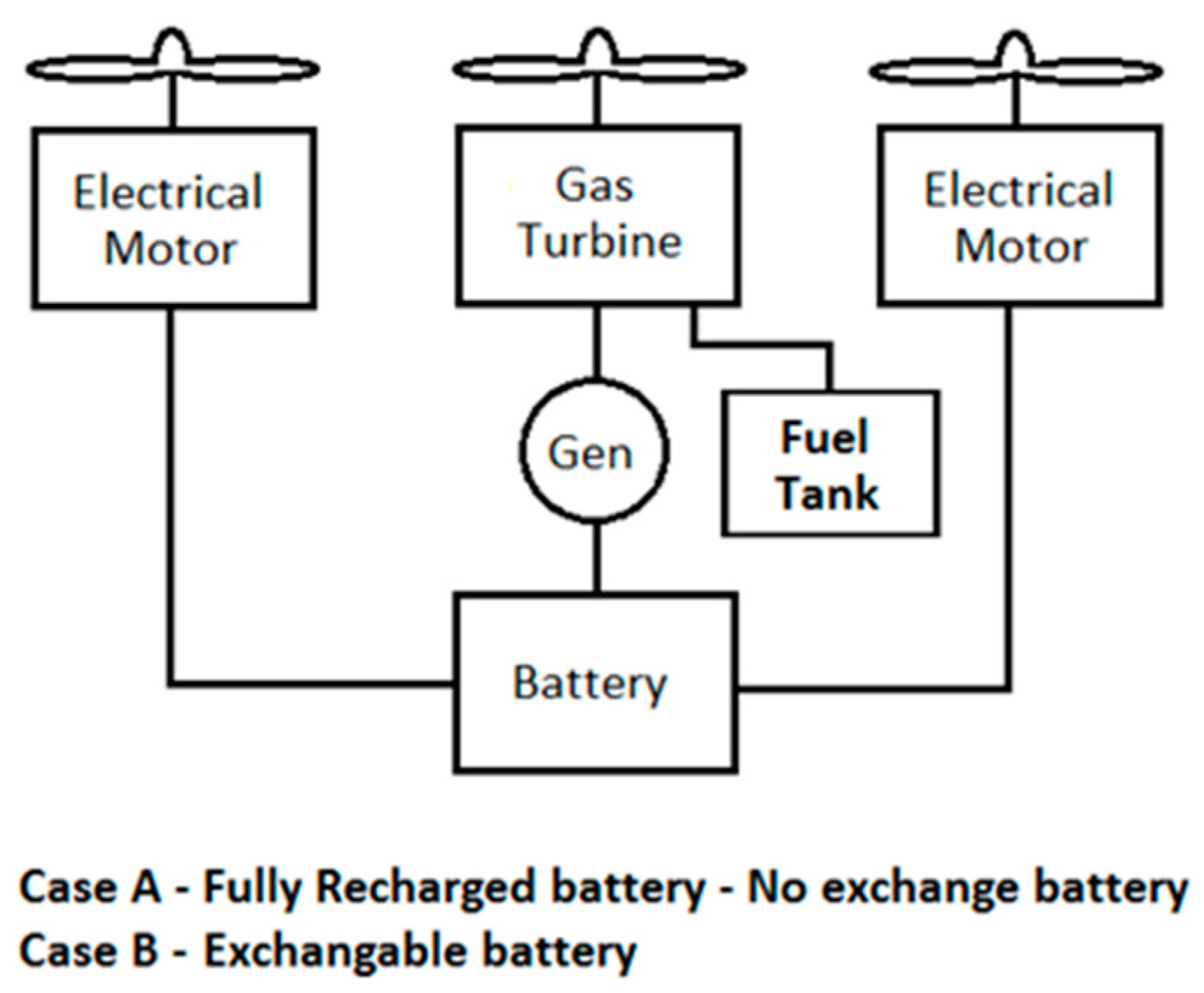
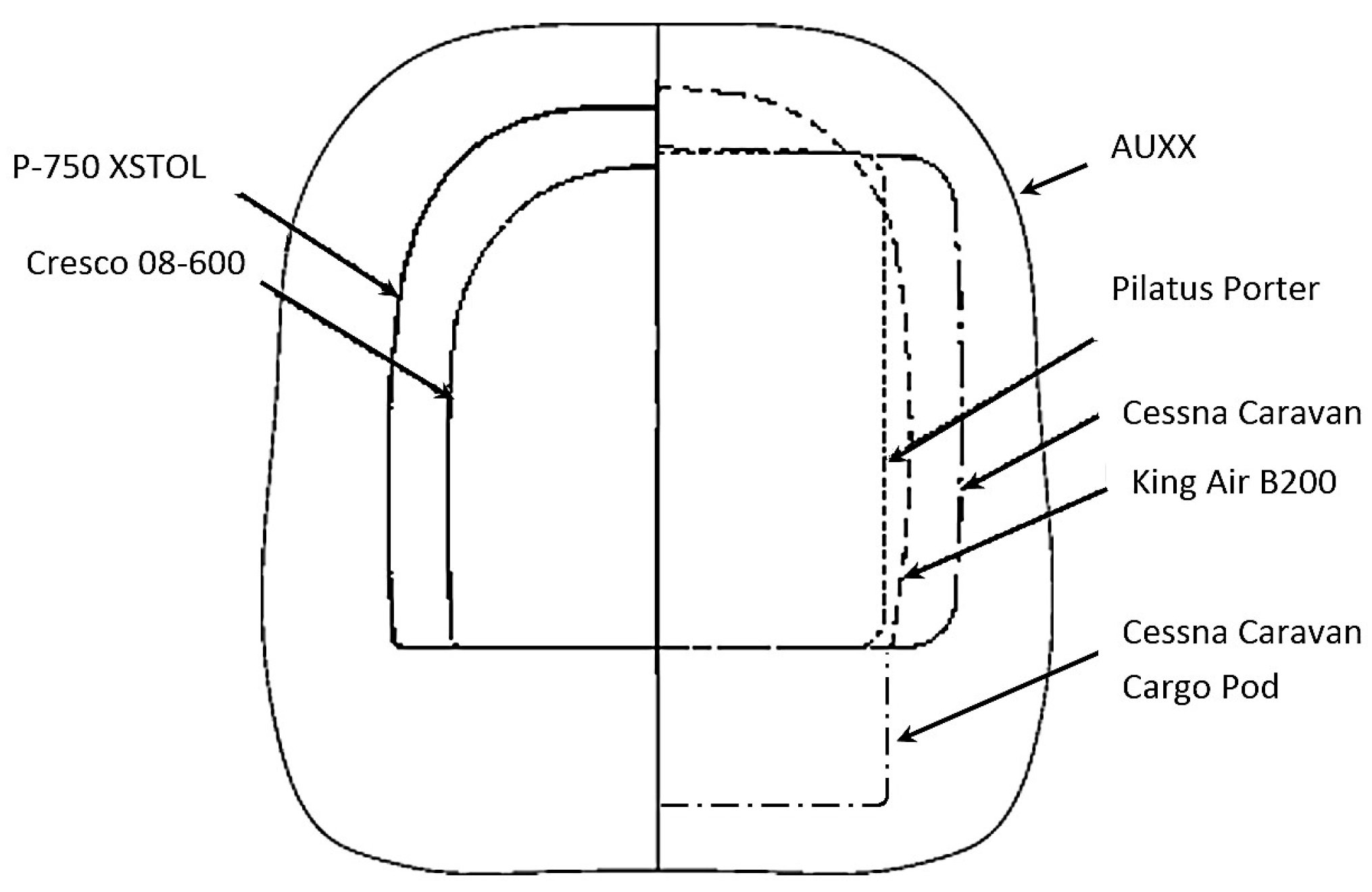
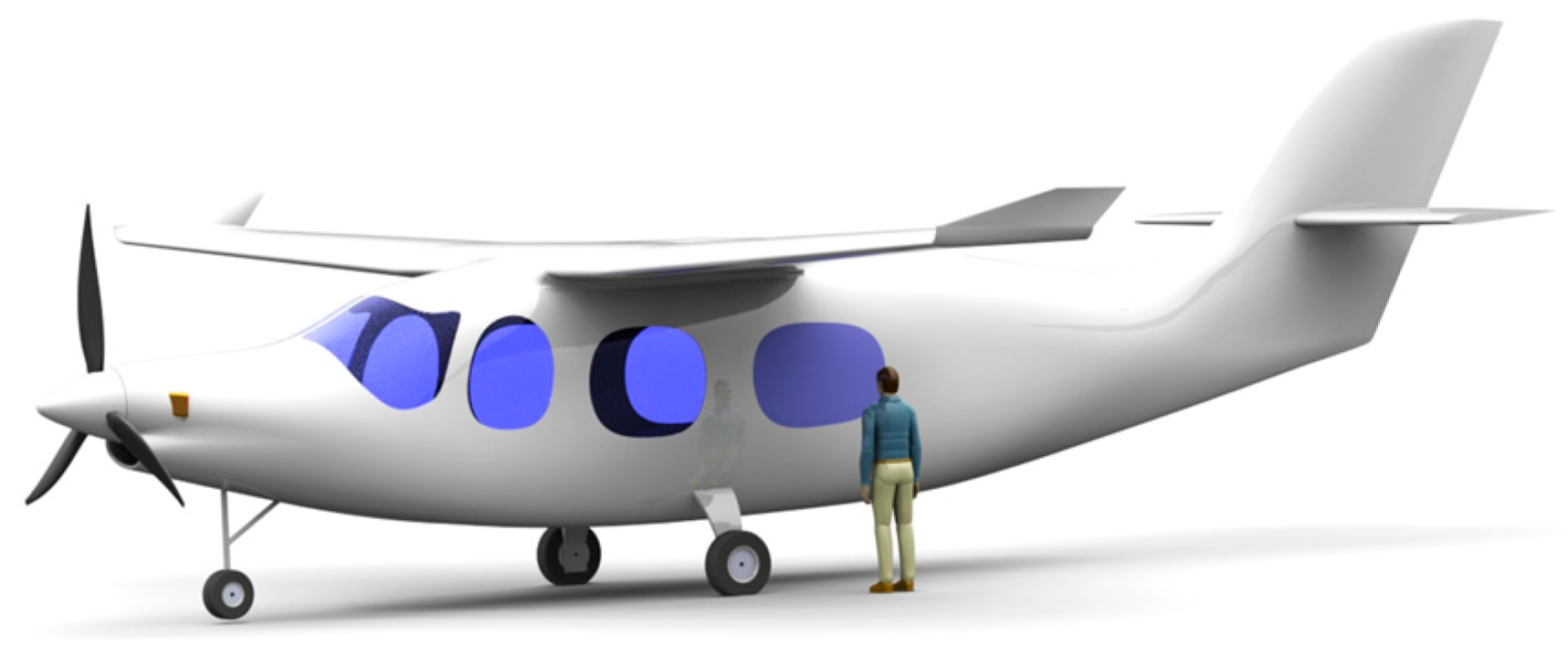
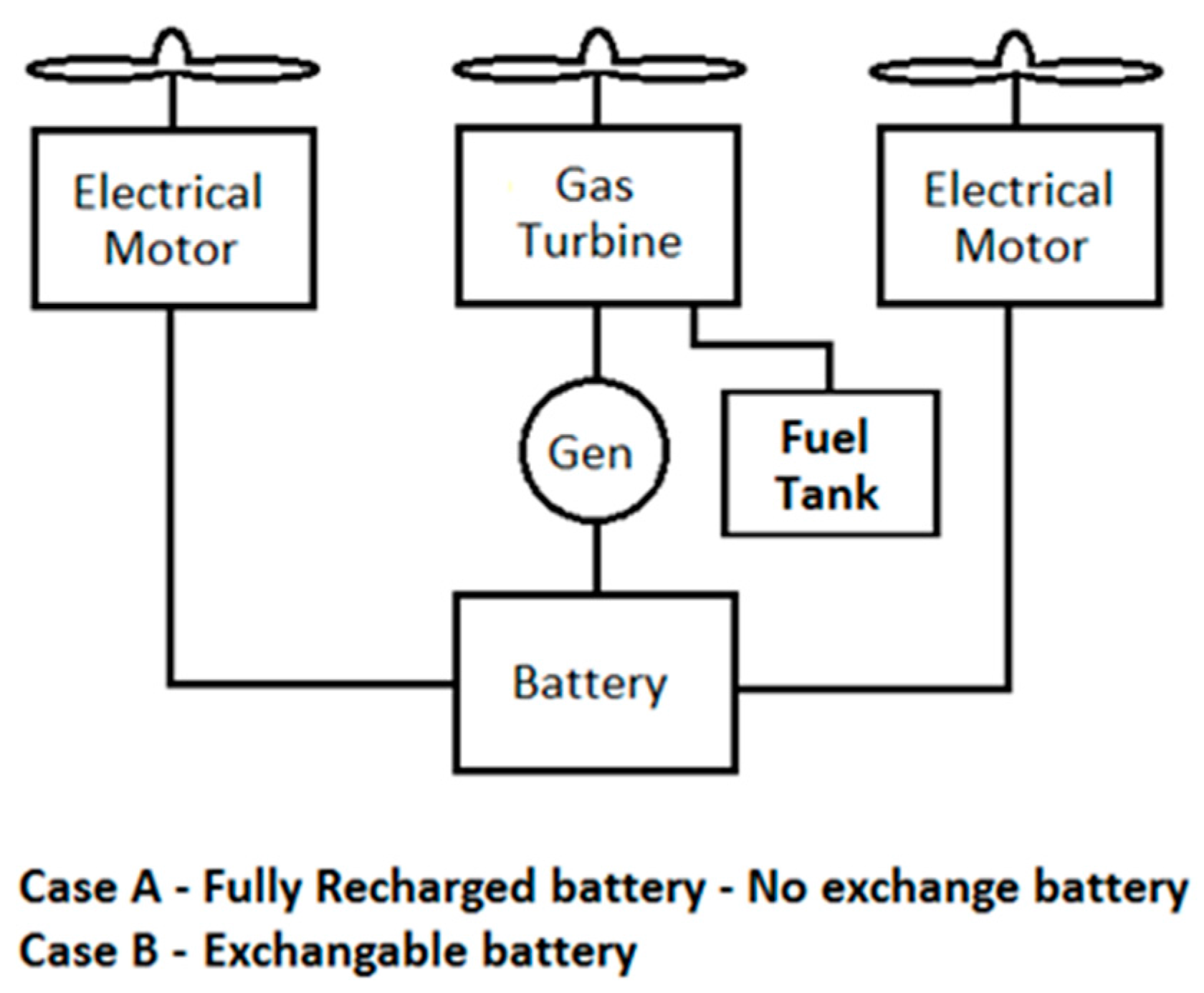
2.2. The Proposed Models
2.3. Mission Energy
- Potential energy requirements to climb;
- Drag energy expended in climb;
- Energy regeneration during descent.
2.4. ICE Limitations
2.5. Rated ICE Power
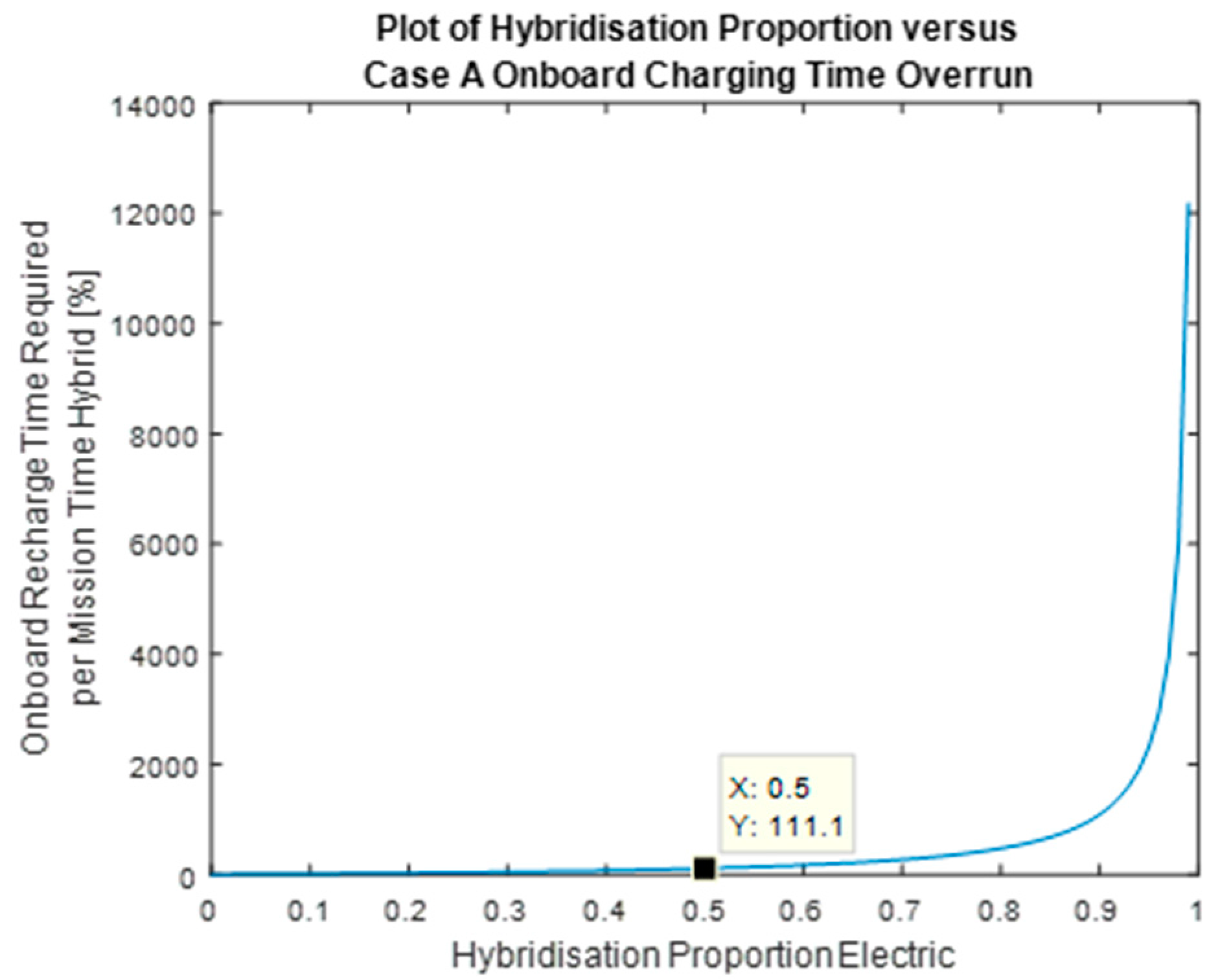
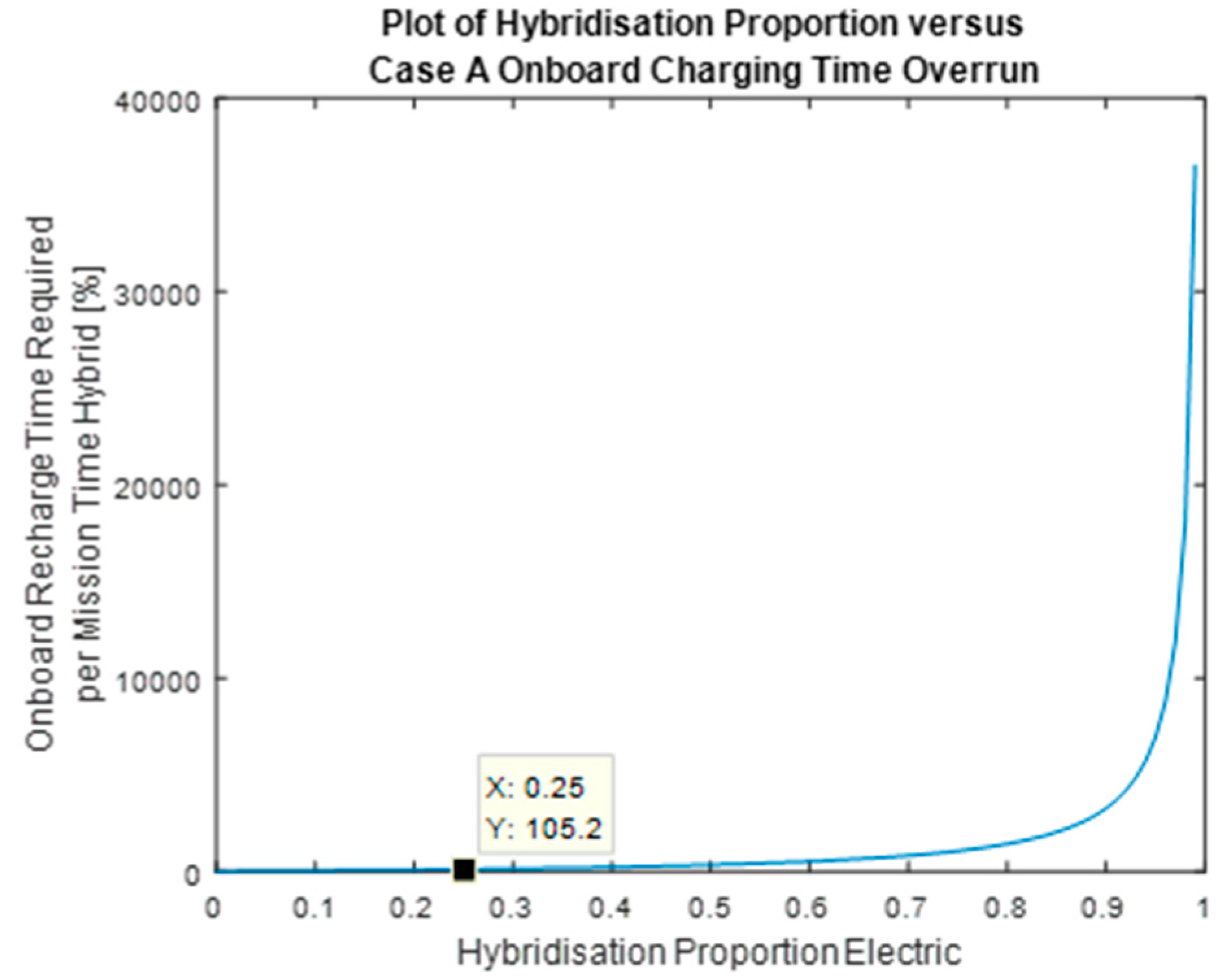
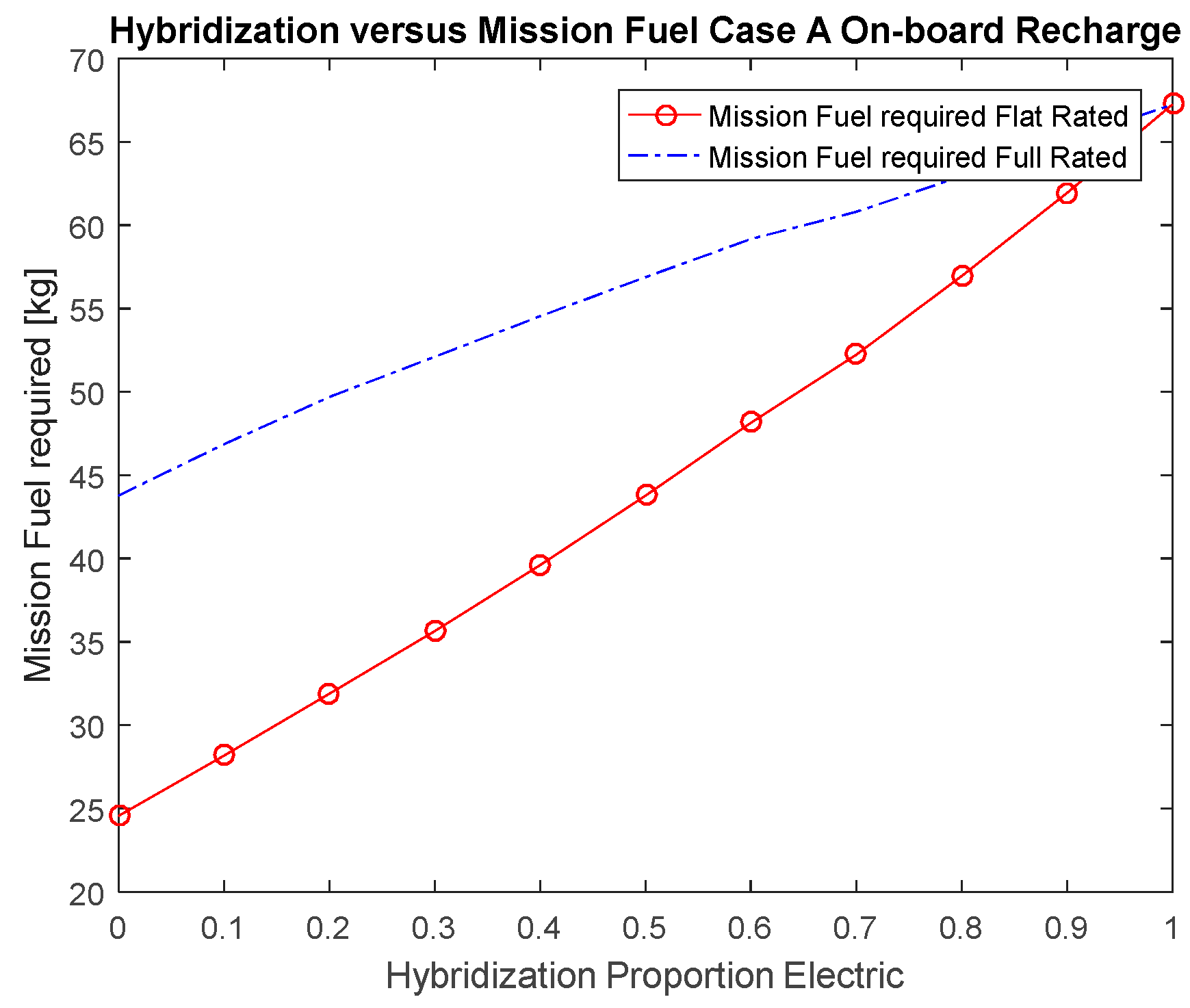
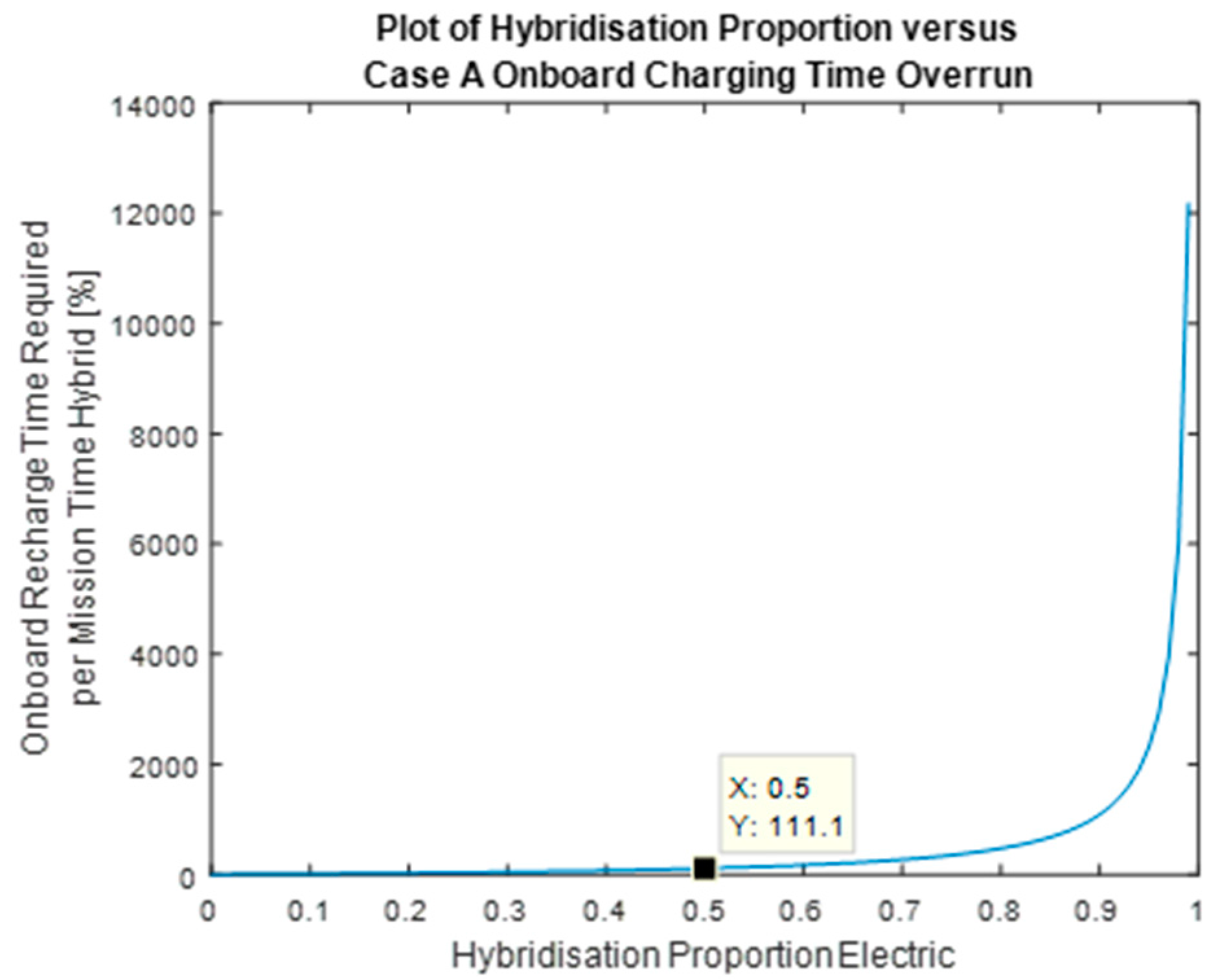
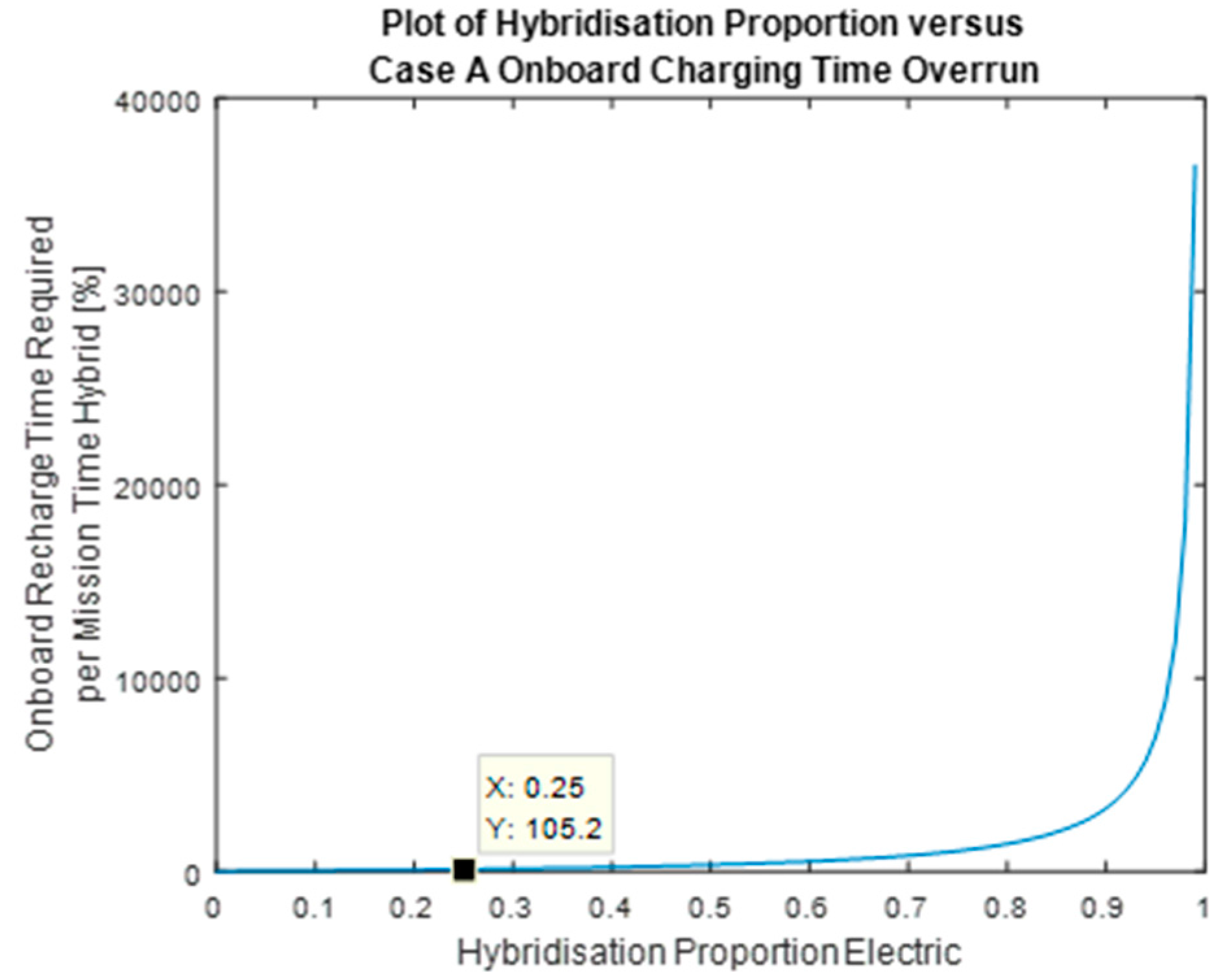
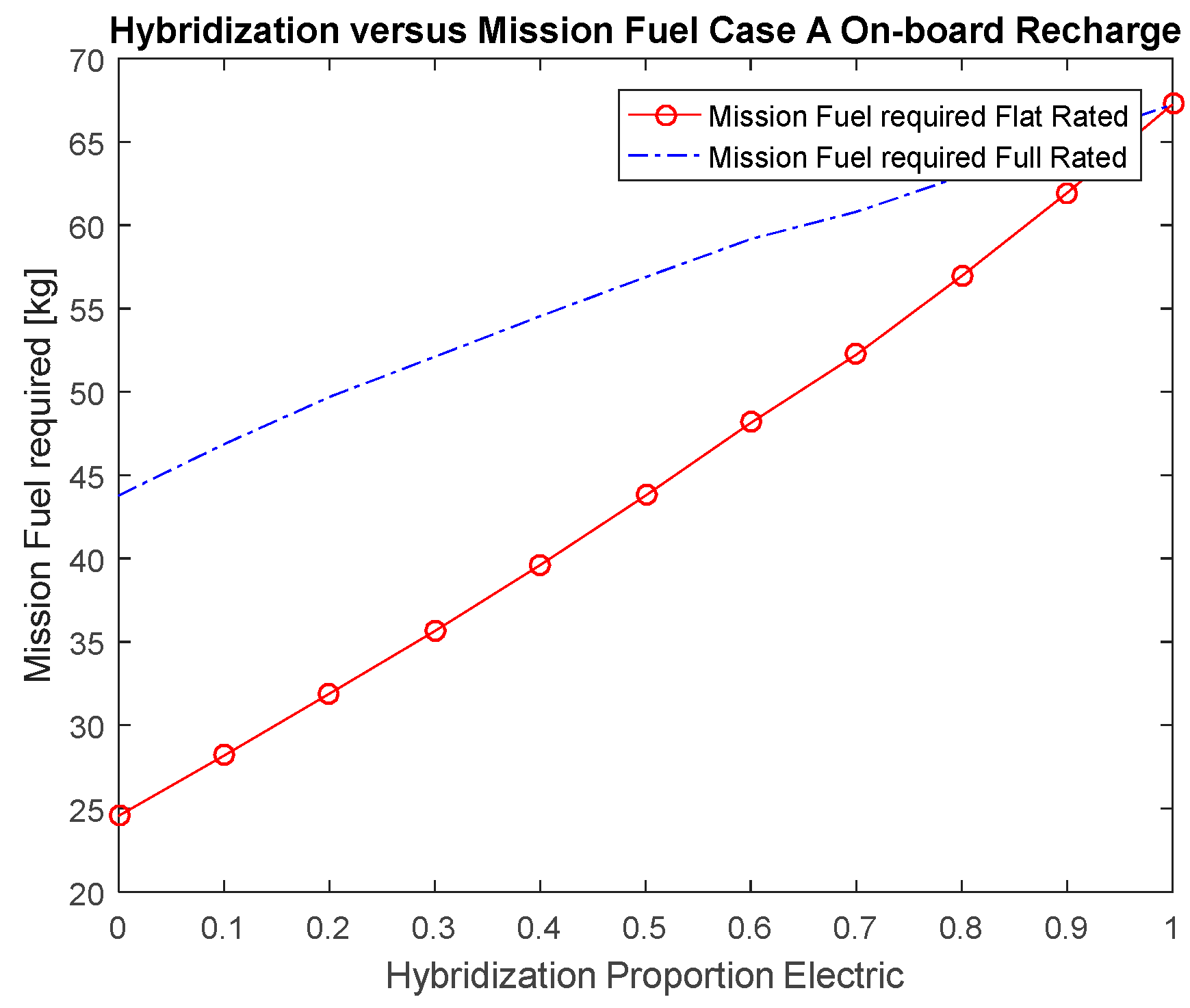
2.6. Recharge Cases
3. Results
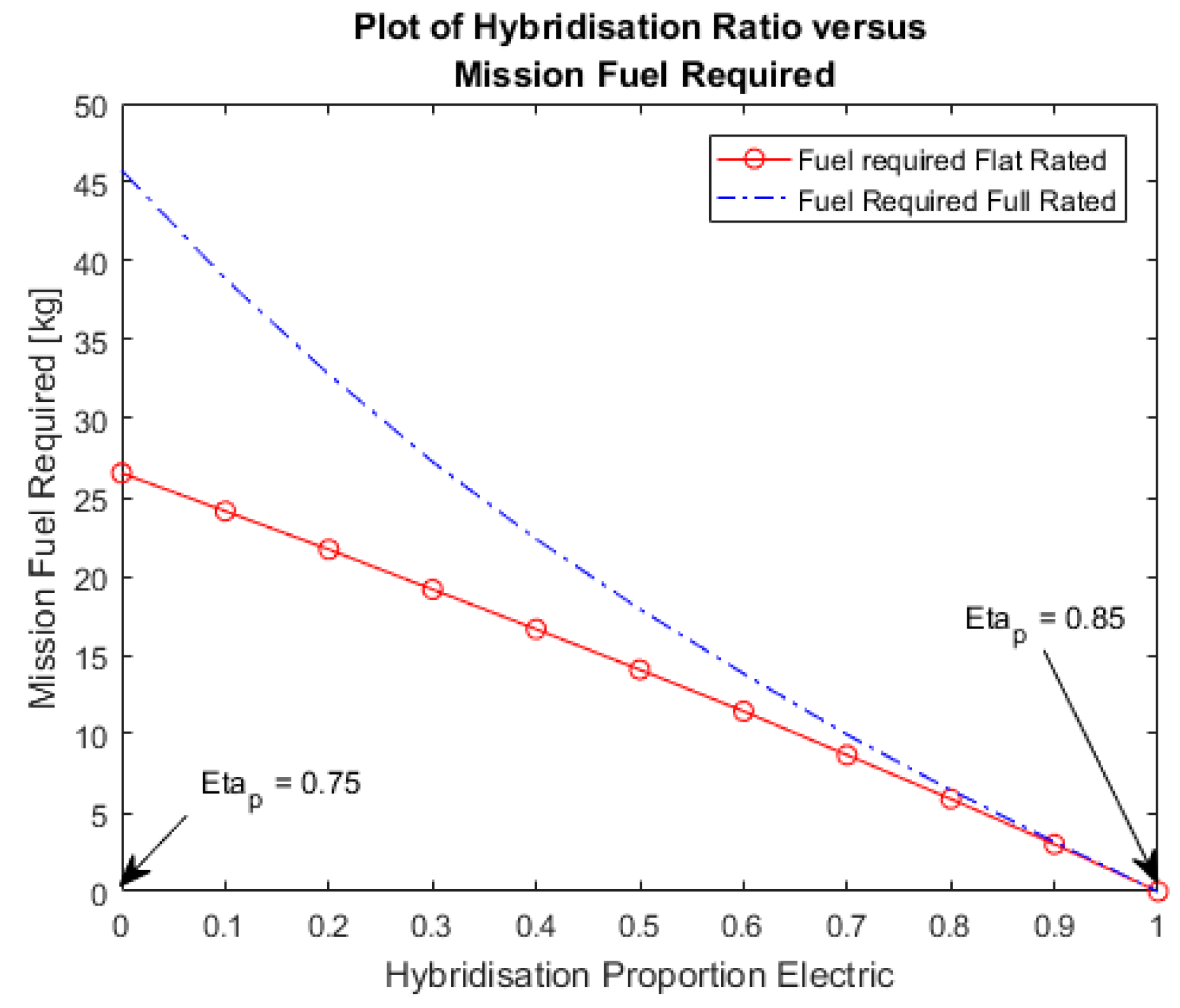
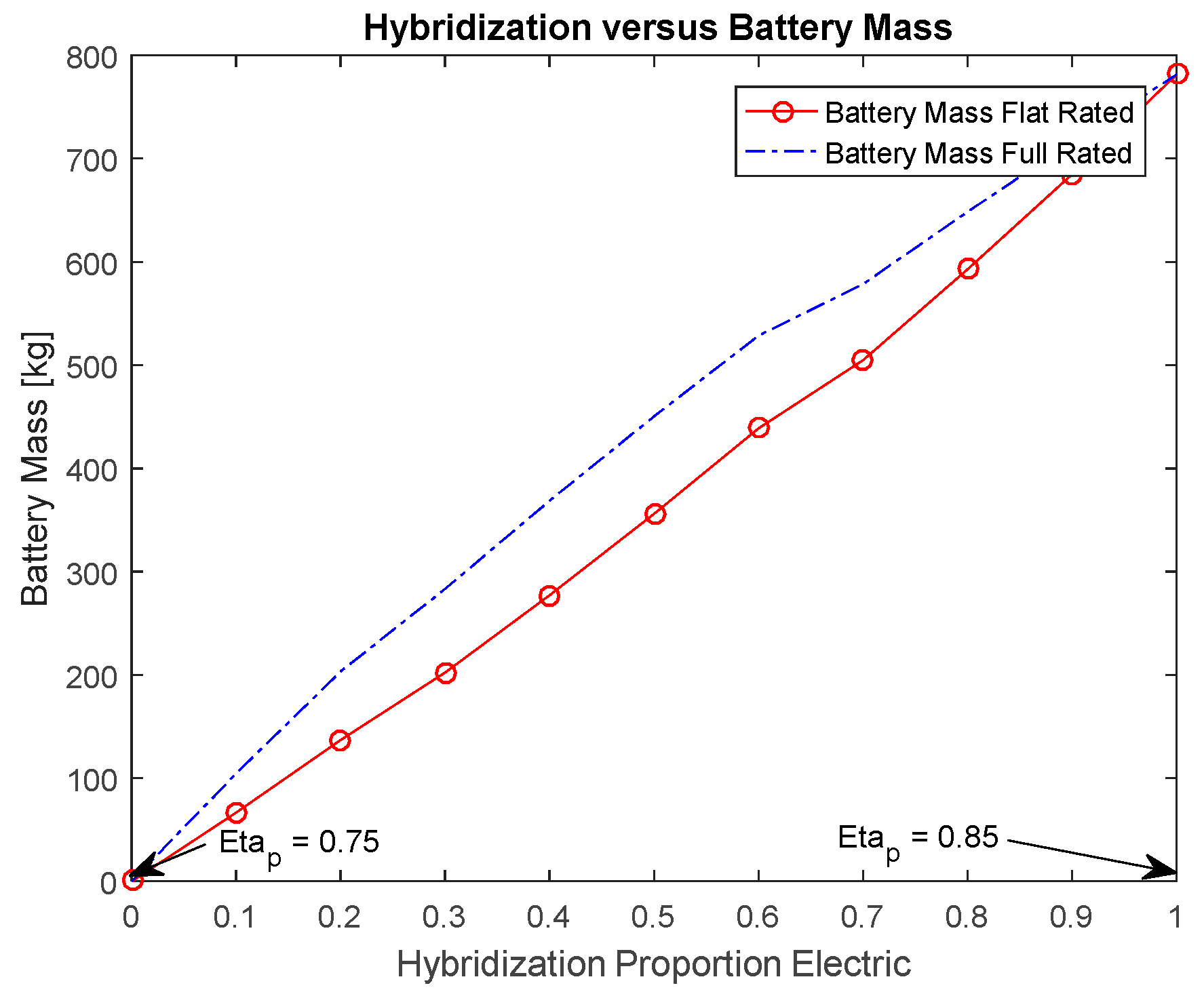
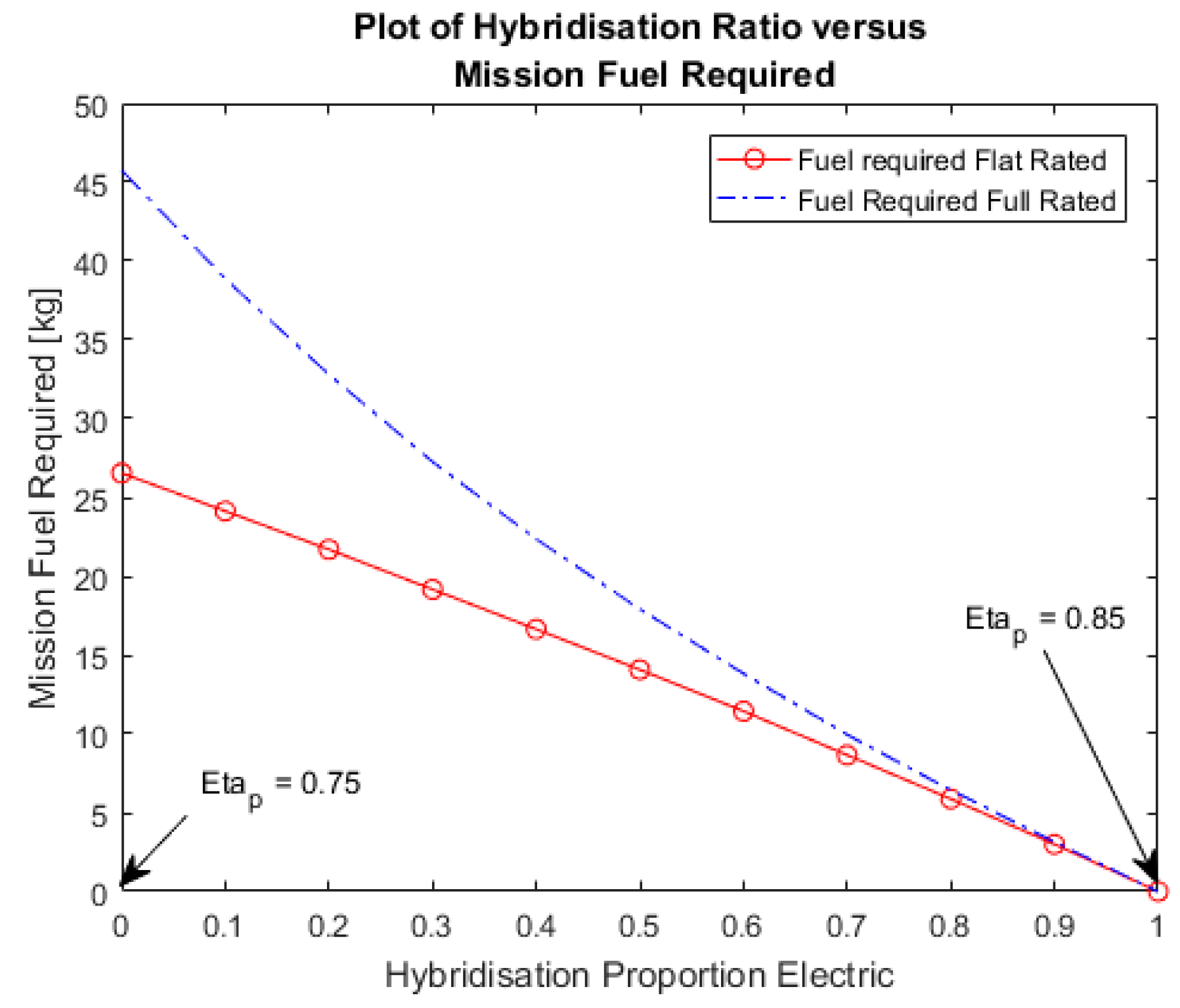
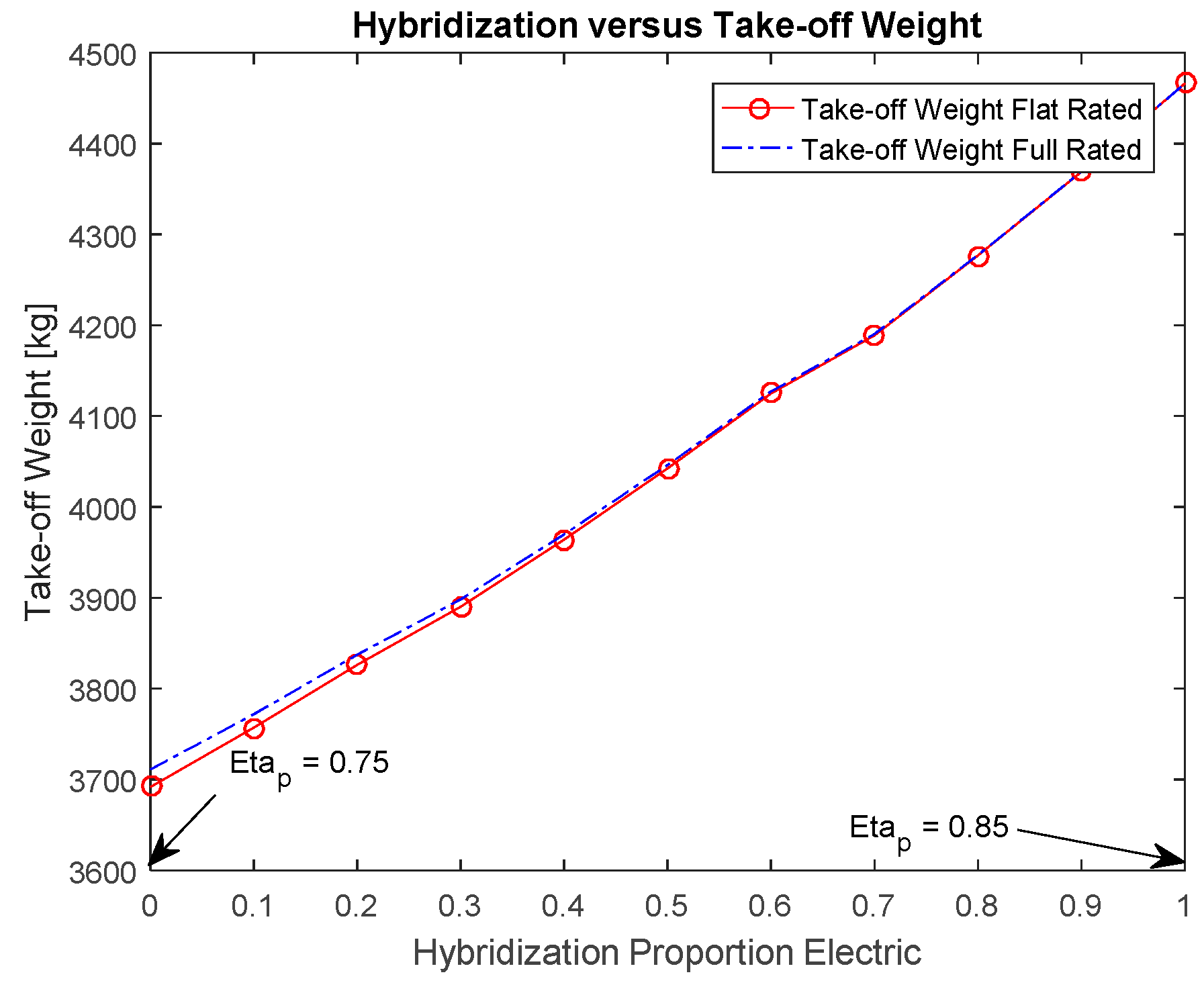
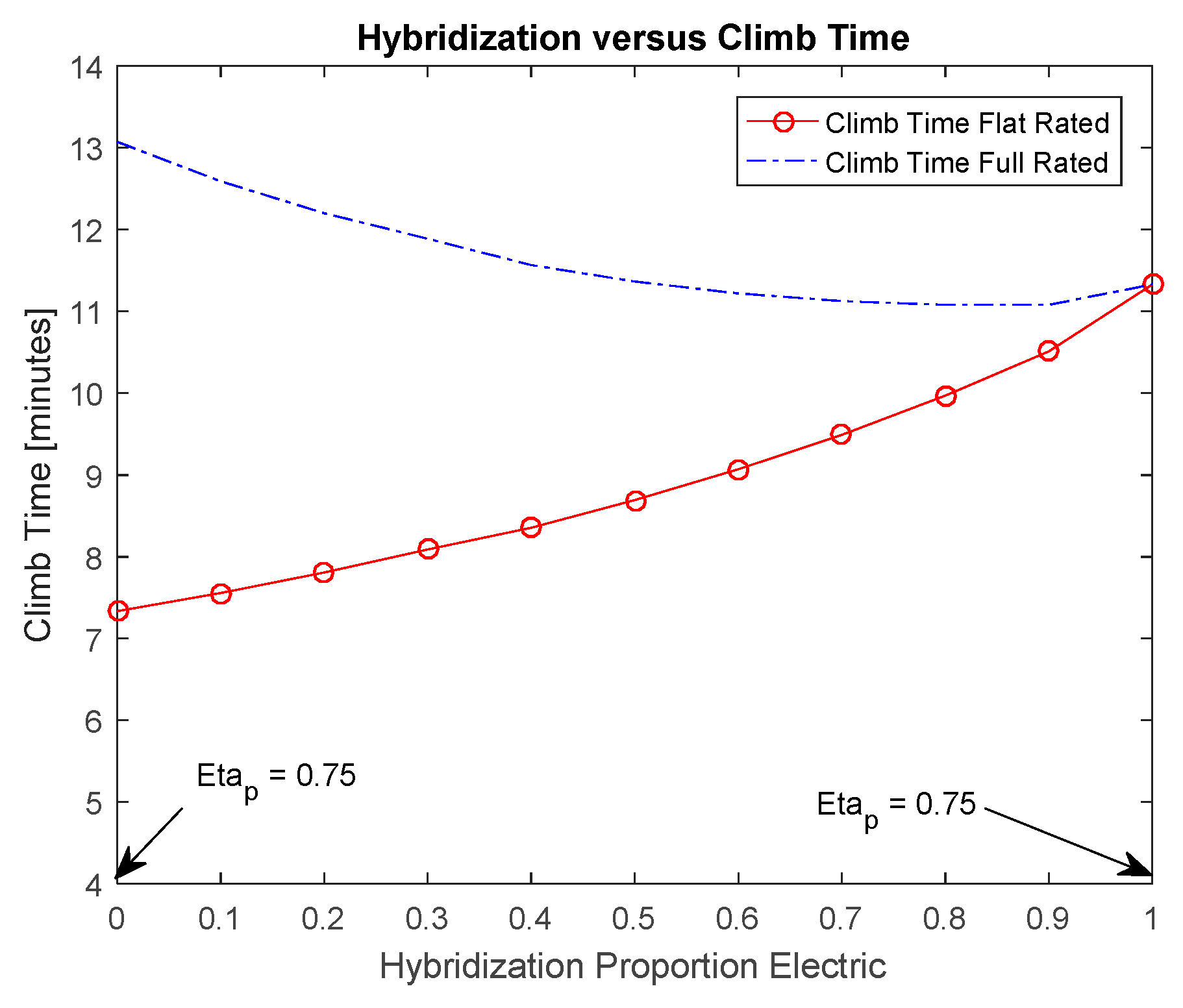
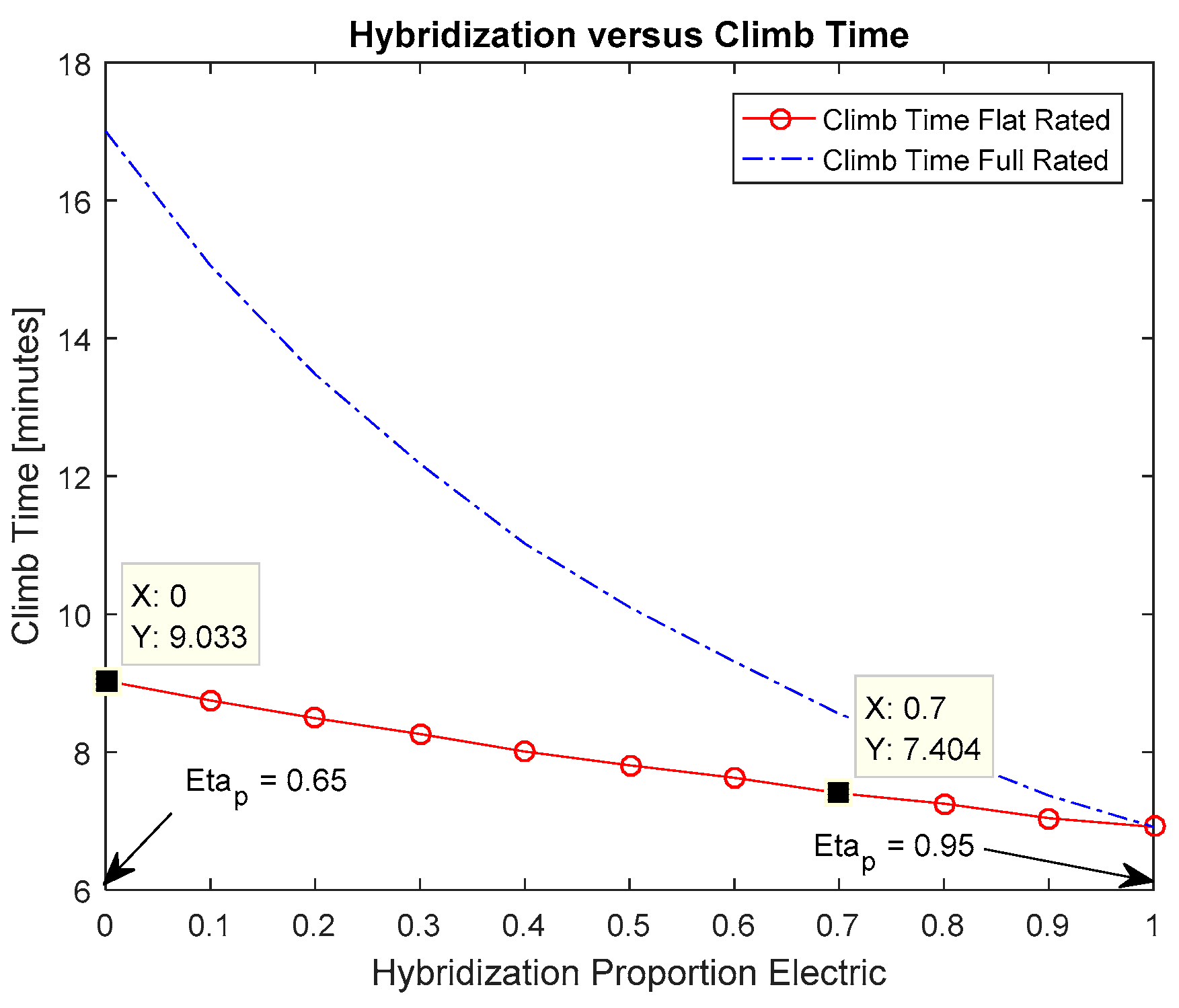
3.1. Hybrid Electric
3.2. Model Assumptions
- High power/weight (where battery storage capacity requirements are low);
- Ease of adding propeller area for any given installed power, allowing greater propulsive efficiency under particular conditions.
3.3. All-Electric
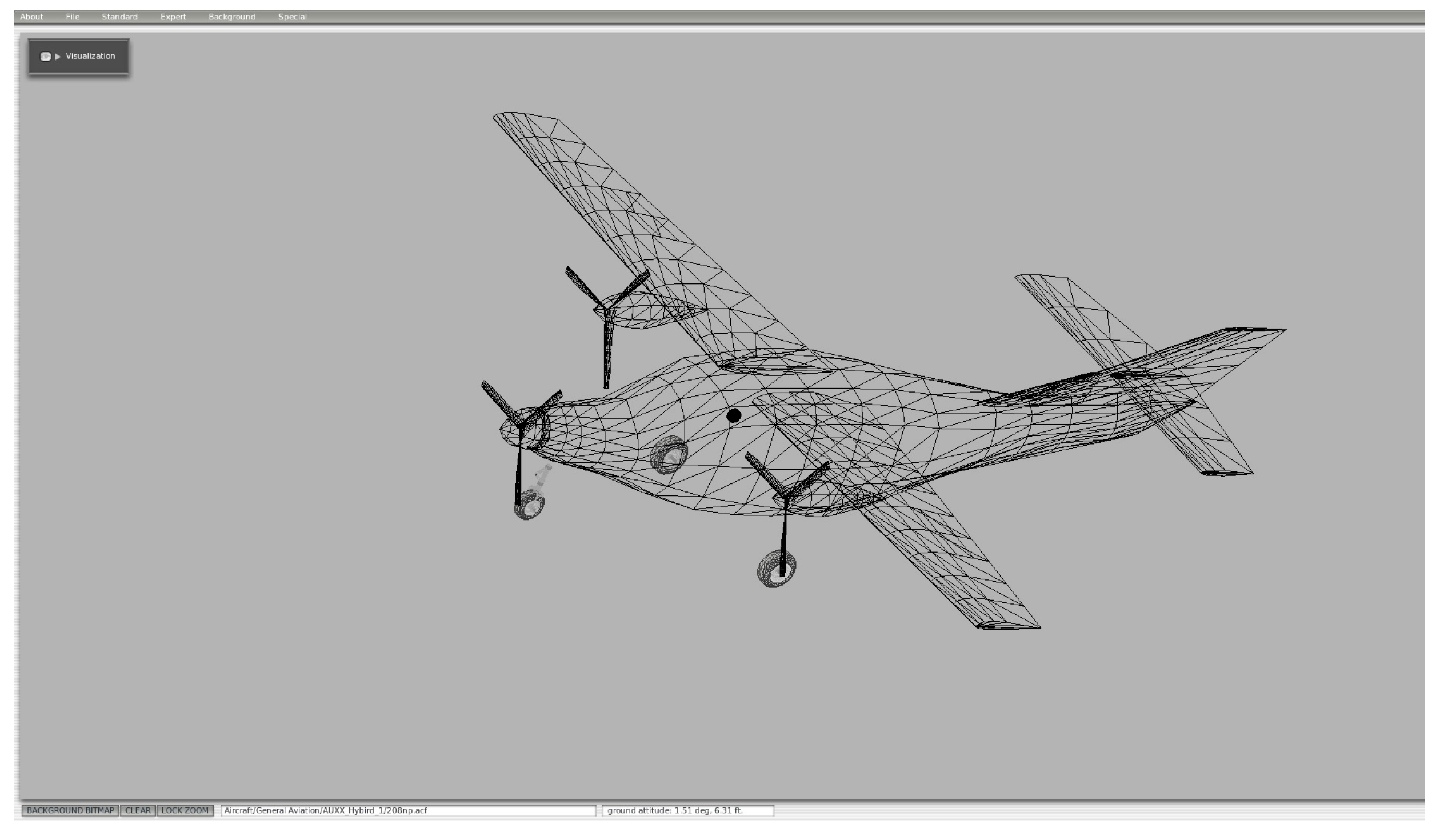
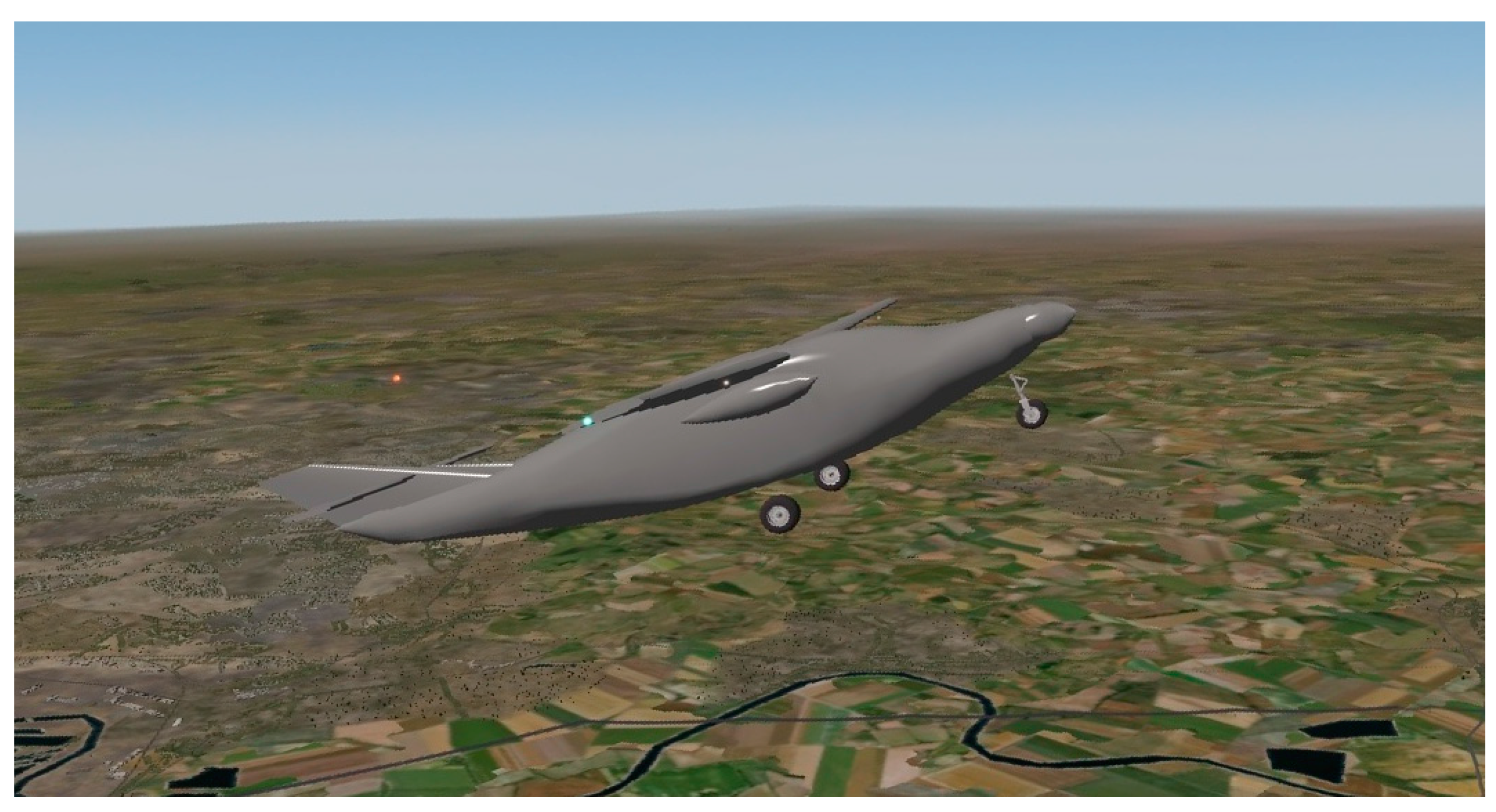
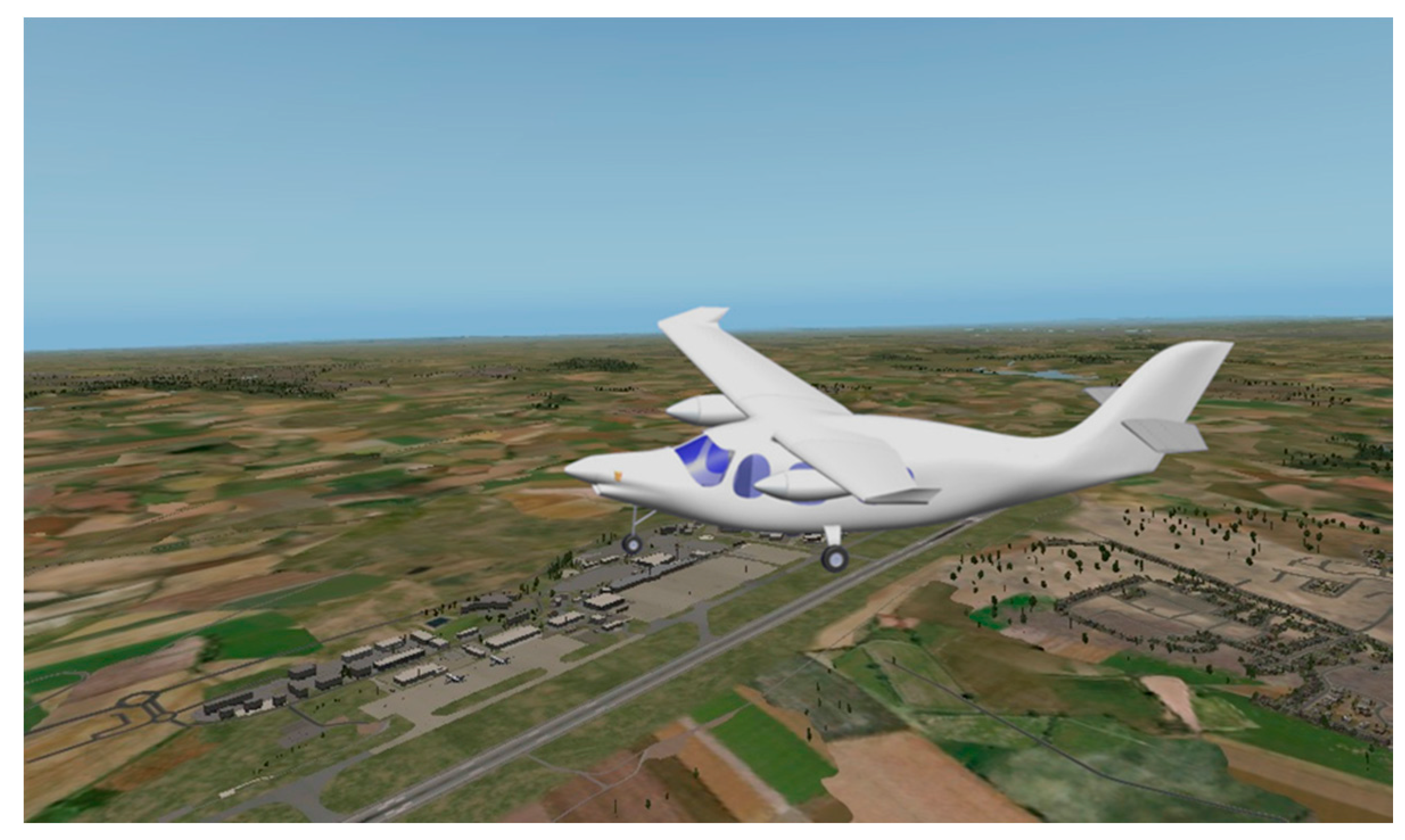
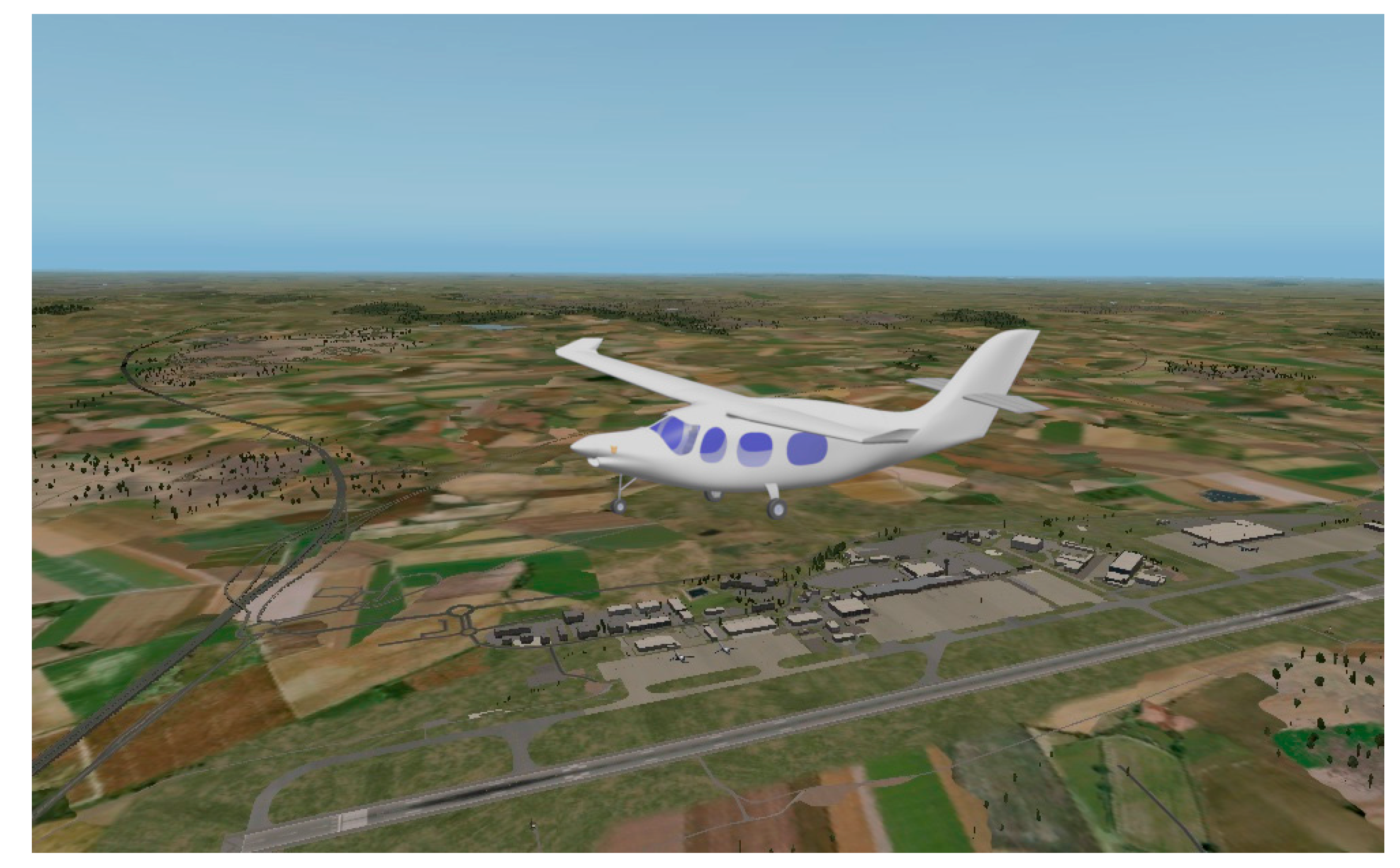
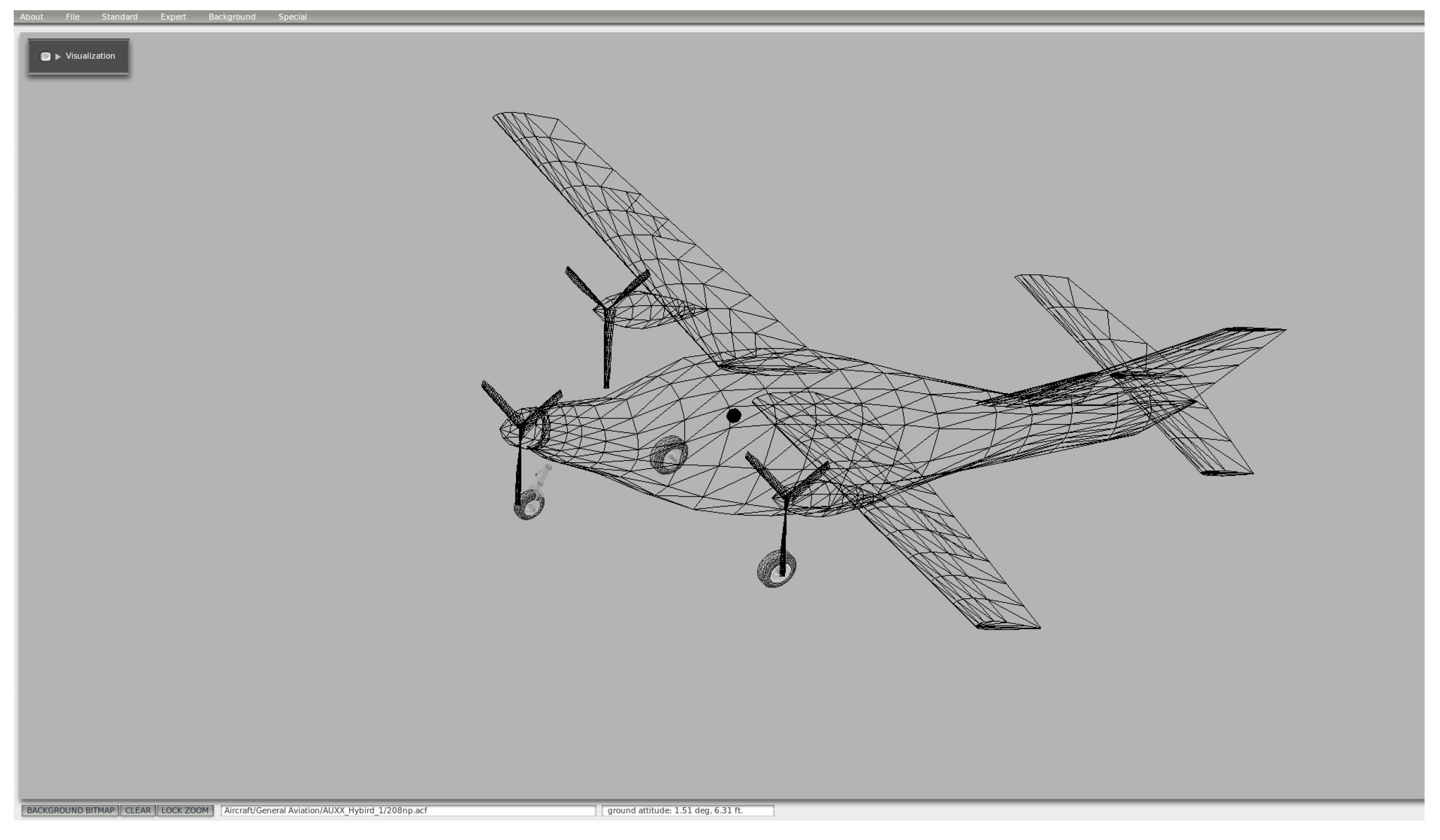
4. X-Plane Modeling
4.1. Multi-Role
4.2. Modularity
5. Future Analysis
Safety and Certification
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Oxford University Press. (2017). Definition of Utility in English. Available online: https://en.oxforddictionaries.com/definition/utility (accessed on 20 July 2017).
- Dropzone Inc. Where to Dropzone. Available online: http://www.dropzone.com/dropzone (accessed on 7 November 2016).
- The USA Parachute Association. Who Skydives? Available online: http://www.uspa.org/facts-faqs/demographics (accessed on 7 November 2016).
- European Commisson. Europe’s Vision for Aviation. Report of the High Level Group on Aviation Research; Directorate-General for Mobility and Transport: Brussels, Belgium, 2011. [Google Scholar]
- Gerada, C.; Galea, M.; Kladas, A. Electrical machines for aerospace applications. In Proceedings of the 2015 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Torino, Italy, 26–27 March 2015; pp. 79–84. [Google Scholar]
- Galea, M.; Hamiti, T.; Gerada, C. Torque density improvements for high performance machines. In Proceedings of the Electric Machines & Drives Conference (IEMDC), Chicago, IL, USA, 12–15 May 2013. [Google Scholar]
- Hepperle, M. Electric Flight—Potential and Limitations; NATO: Brussels, Belgium, 2014. [Google Scholar]
- Specific Range Solutions Ltd. (2009, 2016). Parametric Specific Fuel Consumption Analysis of the PW120A Turboprop Engine. Available online: http://www.srs.aero/wordpress/wp-content/uploads/2009/03/srs-tsd-002-rev-1-pw120a-sfc-analysis.pdf (accessed on 10 November 2016).
- Glesk, T. Requirements Document. In Requirements Document; Glassock, R., Ed.; Air Ute Pty Ltd.: Caloundra, Queensland, Australia, 2012. [Google Scholar]
- Massachusetts Institute of Technology. Thermodynamics and Propulsion. Available online: http://web.mit.edu/16.unified/www/FALL/thermodynamics/notes/node86.html (accessed on 27 February 2017).
- Phillips, W.F. Mechanics of Flight, 2nd ed.; John Wiley and Sons, Inc.: Chichester, UK, 2010. [Google Scholar]
- Glassock, R. Design, Modelling and Measurement of Hybrid Powerplant for Unmanned Aerial Vehicles (UAVs). Master’s Thesis, Master of Engineering, School of Electrical Engineering and Computer Science, Queensland University of Technology, Brisbane, Austria, 2012. [Google Scholar]
- Pornet, C.; Isikveren, A.T. Conceptual design of hybrid-electric transport aircraft. Prog. Aerosp. Sci. 2015, 79, 114–135. [Google Scholar] [CrossRef]
- Plas, A.P.; Sargeant, M.A.; Madani, V.; Crichton, D.; Greitzer, E.M.; Hynes, T.P.; Hall, C.A. Performance of a Boundary Layer Ingesting (BLI) Propulsion System. In Proceedings of the 45th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2007. [Google Scholar]
- Stanford University. (2009). Simple Performance Estimation. Available online: http://adl.stanford.edu/sandbox/groups/aa241x/wiki/e054d/attachments/31ca0/performanceanddrag.pdf (accessed on 30 June 2017).
- Bullis, K. (2013). Once a Joke, Battery-Powered Airplanes Are Nearing Reality. Available online: https://www.technologyreview.com/s/516576/once-a-joke-battery-powered-airplanes-are-nearing-reality/ (accessed on 5 May 2017).
- Rosenfelt, C. (2014). Skydive Aircraft List. Available online: http://skydiverdriver.blogspot.co.uk/p/skydive-aircraft.html (accessed on 17 November 2016).
- PIPISTREL d.o.o. Ajdovščina. (2014). Pipistrel Aircraft—UL 3-Axis AIRCRAFT—Alpha Electro—Overview. Available online: http://www.pipistrel.si/plane/alpha-electro/overview (accessed on 12 December 2016).
- Williams, W.R. A Simulator Based Approach to DT&E of Small UAVs; School of Electrical and Sytsem Engineering, University of South Australia: Mwson Lakes, South Australia, 2002. [Google Scholar]
- Garcia, R.; Barnes, L. Multi-UAV Simulator Utilizing X-Plane. J. Intell. Robot. Syst. 2010, 57, 393–406. [Google Scholar] [CrossRef]
- Lan, C.E.; Roskam, J. Airplane Aerodynamics and Performance; Aviation and Engineering: Ottawa, ON, Canada, 1980. [Google Scholar]
- Federal Aviation Administration. AC 20-128A Design Considerations for Minimizing Hazards Caused by Uncontained Turbine Engine and Auxiliary Power Unit Rotor Failure; The United States Department of Transportation (USDOT): Washington, DC, USA, 1997.
- Honeywell. Available online: https://aerocontent.honeywell.com/aero/common/documents/myaerospacecatalog-documents/BA_brochures-documents/TPE331-12JR_for_850_Caravan.pdf (accessed on 25 May 2017).
- Texas Turbines. (2016). Product Brochures and Spec Sheets Supervan 900. Available online: http://www.texasturbines.com/product-brochures/ (accessed on 25 May 2017).
- Friedrich, C.; Robertson, P.A. Hybrid-electric propulsion for automotive and aviation applications. CEAS Aeronaut. J. 2015, 6, 279–290. [Google Scholar] [CrossRef] [Green Version]
- Fefermann, Y.; Maury, C.; Level, C.; Isikveren, A.T. Hybrid-Electric motive power systems for commuter transport applications. In Proceedings of the 30th Congress of the International Council of the Aeronautical Sciences, Daejeon, Korea, 25–30 September 2016. [Google Scholar]
- Eres, M.H.; Bertoni, M.; Kossman, M.; Scanlon, J. Mapping Customer Needs to Engineering Characteristics: An Aerospace Perspective for Conceptual Design. J. Eng. Des. 2014, 251, 64–87. [Google Scholar] [CrossRef]
- Part 23—Airworthiness Standards: Normal, Utility, Acrobatic, and Commuter Category Airplanes ed: Electronic Code of Federal Regulations; U.S. Government Publishing Office: Washington, DC, USA, 2016.
- Ullman, D.G. The Mechanical Design Process, 4th ed.; McGraw-Hill: New York, NY, USA, 2010. [Google Scholar]
- Gudmundsson, S. General Aviation Aircraft Design—Applied Methods and Procedures, 1st ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Markish, J.; Willcox, K. A value-based approach for commercial aircraft conceptual design. In Proceedings of the ICAS2002 Congress, Toronto, ON, Canada, 8–13 September 2002. [Google Scholar]
- Ulrich, K.T.; Eppinger, S.D. Product Design and Development, 5th ed.; McGraw-Hill: New York, NY, USA, 2012. [Google Scholar]
- Eckert, C.; Clarkson, J.; de Weck, O.; Keller, R. Engineering change: Drivers, sources, and approaches in industry. In Proceedings of the 17th International Conference on Engineering Design, Stanford, CA, USA, 21 October 2009. [Google Scholar]
- Eckert, C.M.; Keller, R.; Earl, C.; Clarkson, P.J. Supporting change processes in design: Complexity, prediction and reliability. Reliab. Eng. Syst. Saf. 2006, 91, 1521–1534. [Google Scholar] [CrossRef]
- Clarkson, P.J.; Simons, C.; Eckert, C. Predicting Change Propagation in Complex Design of DETC’01. In Proceedings of the Design Engineering Technical Conference, Pittsburgh, PA, USA, 9–12 September 2001. [Google Scholar]
- Clarkson, P.J.; Simons, C.; Eckert, C. Change prediction for product redesign. In Proceedings of the International Conference on Engineering Design, Glasgow, UK, 21–23 August 2001. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Energy Density (Wh/kg) | Power Density (kW/kg) | Efficiency |
|---|---|---|---|
| EM | − | 6 | 0.9 |
| Power Electronics | − | 6 | 0.9 |
| Battery | 200 | − | 0.9 |
| ICE | 4 | 0.26 |
| Aircraft Model | Installed Power (kW) | Empty Weight 1 (kg) | Payload Weight 1 (kg) | Oswald Efficiency Factor | Propeller Effciency |
|---|---|---|---|---|---|
| AUXX Conventional | 670 | 2700 | 800 | 0.835 | 0.75 |
| AUXX Hybrid | 670 | 2700 + %EPS | 800 | 0.835 | Scaled |
| AUXX All-Electric | 670 | 3500 | 800 | 0.835 | 0.85 |
| Aircraft Model | Installed Power (kW) | Empty Weight 1 (kg) | Payload Weight 1 (kg) | Climb Time Analytic (minutes) | Climb Time Simulation (minutes) |
|---|---|---|---|---|---|
| AUXX Conventional | 670 | 2400 | 800 | 9 | 10.6 |
| AUXX Hybrid | 670 | 3300 | 800 | 7.4 | 8.6 |
| X-Plane Aircraft Model | Installed Power (kW) | Empty Weight 1 (kg) | Payload Weight 1 (kg) | Average Climb Rate to 14,000 ft (ft/min) |
|---|---|---|---|---|
| AUXX Conventional | 670 | 2400 | 800 | 1320 |
| AUXX Hybrid 2 | 670 | 3300 | 800 | 1620 |
| C208 Conventional | 670 | 2200 | 800 | 1550 |
| C208 Hybrid 2 | 670 | 3000 | 800 | 2150 |
| Real Aircraft Data | ||||
| 850HP C208 3 | 635 | 2200 | 1800 | * 1460 4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glassock, R.; Galea, M.; Williams, W.; Glesk, T. Hybrid Electric Aircraft Propulsion Case Study for Skydiving Mission. Aerospace 2017, 4, 45. https://doi.org/10.3390/aerospace4030045
Glassock R, Galea M, Williams W, Glesk T. Hybrid Electric Aircraft Propulsion Case Study for Skydiving Mission. Aerospace. 2017; 4(3):45. https://doi.org/10.3390/aerospace4030045
Chicago/Turabian StyleGlassock, Richard, Michael Galea, Warren Williams, and Tibor Glesk. 2017. "Hybrid Electric Aircraft Propulsion Case Study for Skydiving Mission" Aerospace 4, no. 3: 45. https://doi.org/10.3390/aerospace4030045
APA StyleGlassock, R., Galea, M., Williams, W., & Glesk, T. (2017). Hybrid Electric Aircraft Propulsion Case Study for Skydiving Mission. Aerospace, 4(3), 45. https://doi.org/10.3390/aerospace4030045