
Development of Flight Path Planning for Multirotor Aerial Vehicles

Abstract
:
1. Introduction
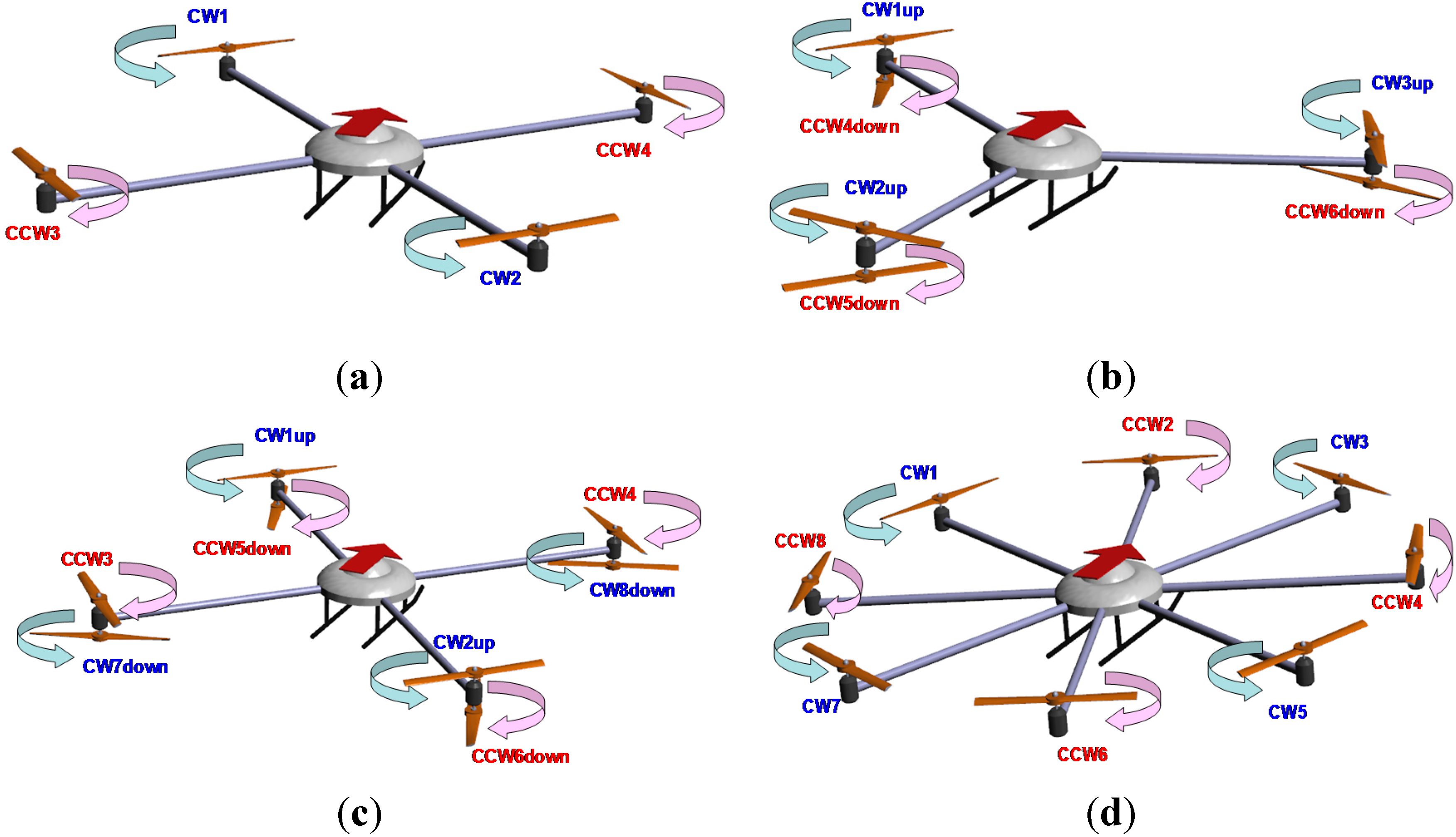
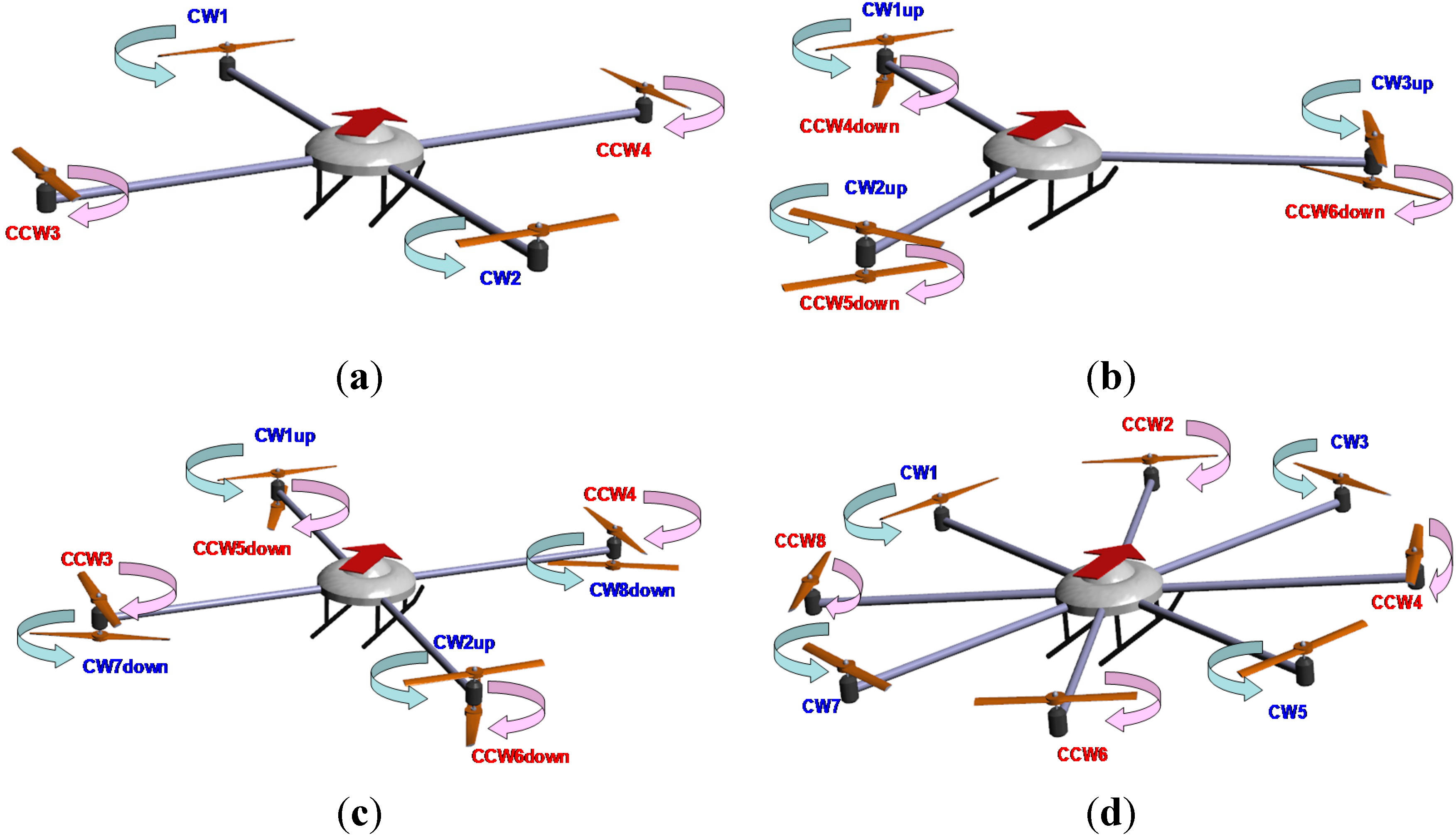
2. Descriptions of Multirotor
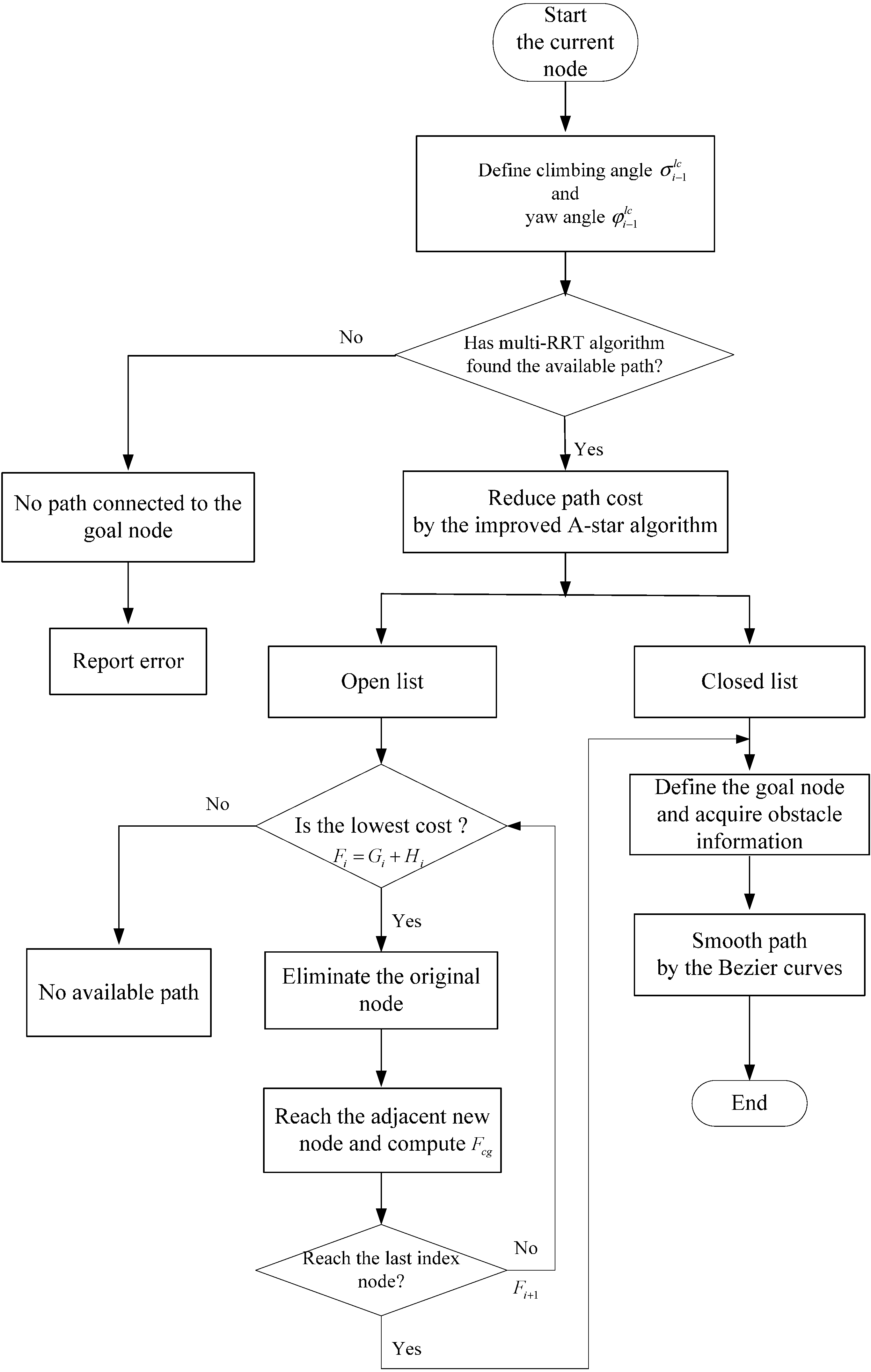
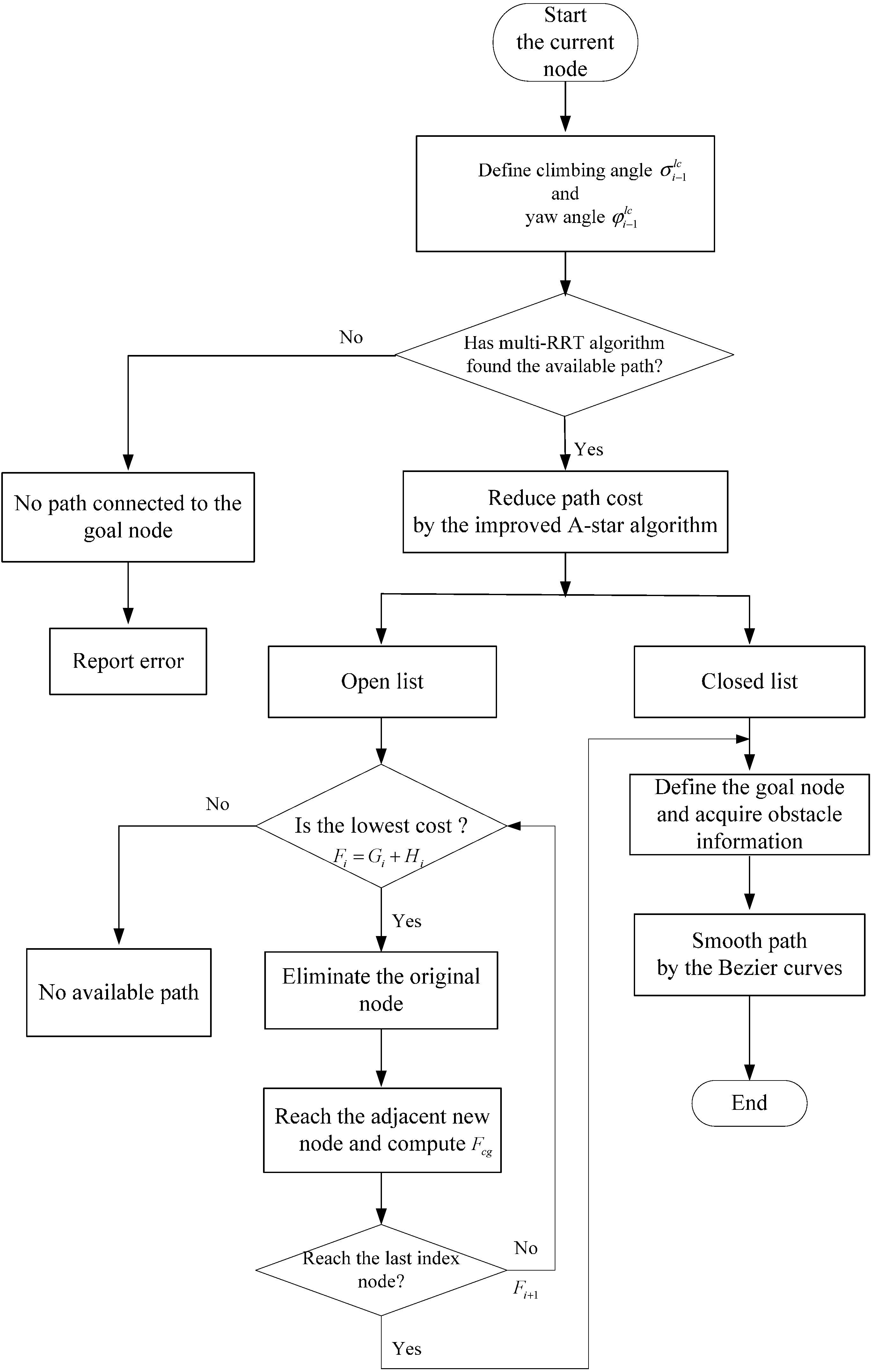
3. Overview of the Proposed Flight Path Planner
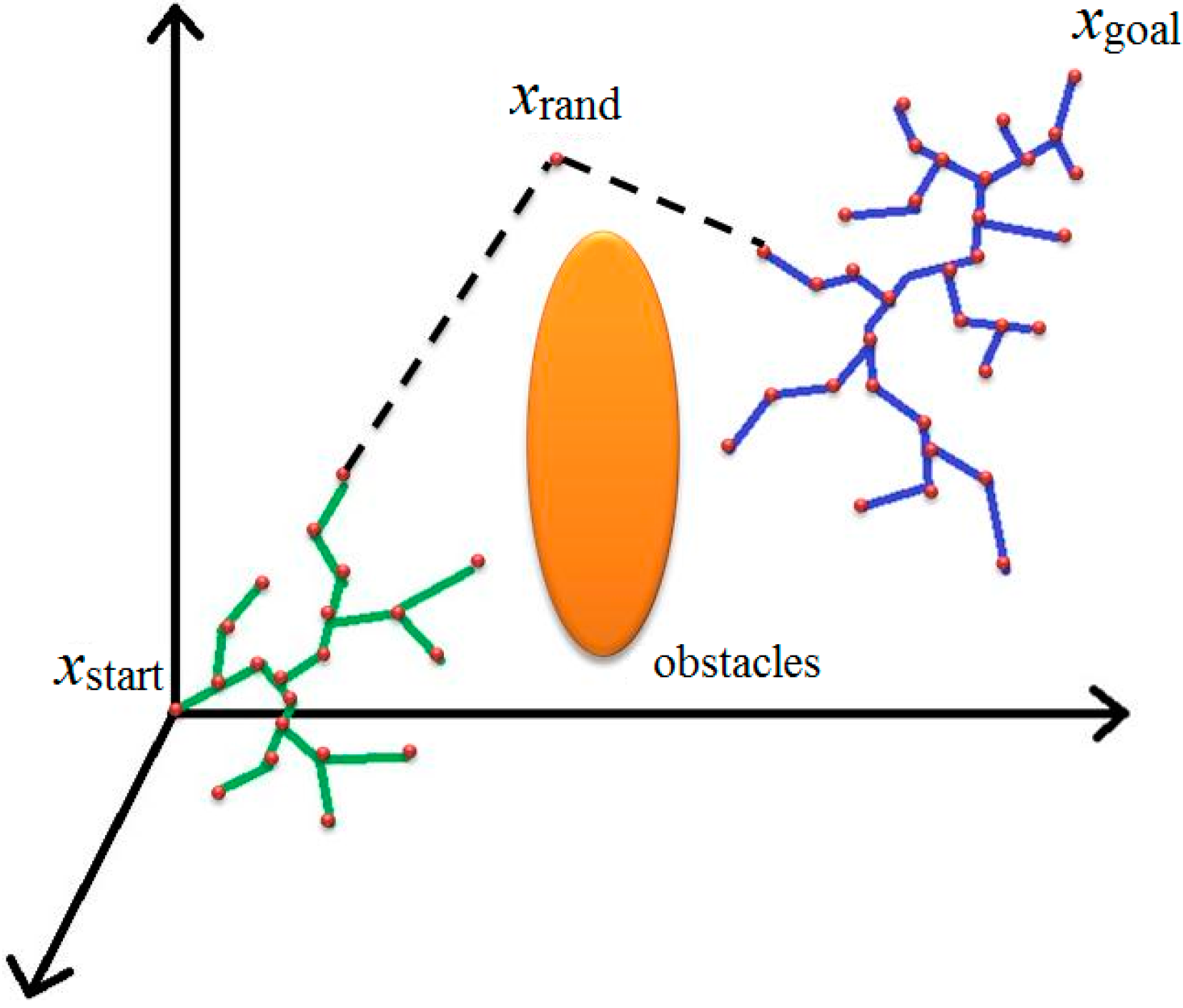
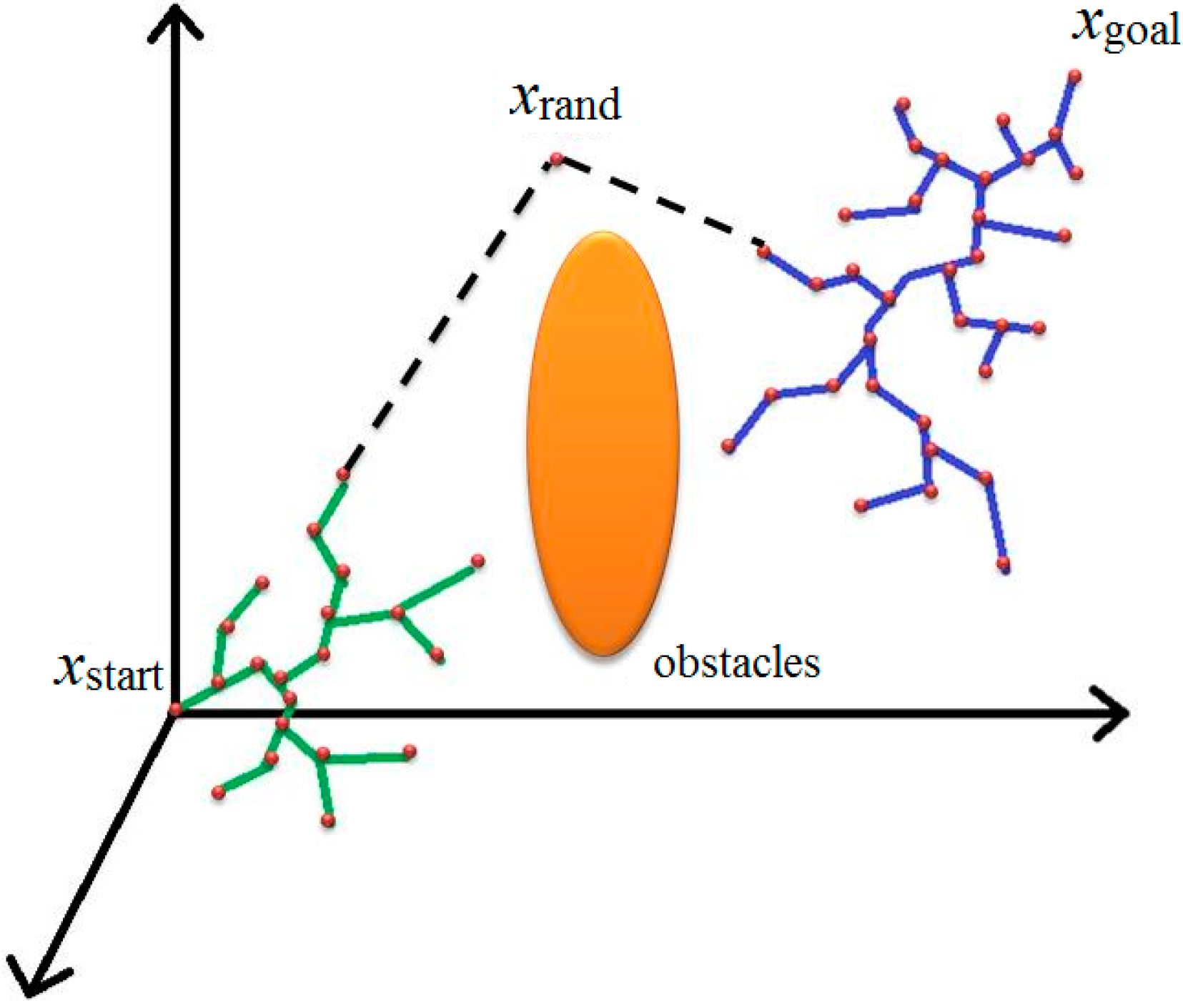
3.1. Rapidly-Exploring Random Tree (RRT)
- (1)
- Generation of random nodes: pick the random nodes in 3D environment.
- (2)
- Expansion: pick a random node and then build connection between this node and the nearest node in the random tree.
- (3)
- Termination condition: join the goal node to the random tree.
3.2. A-Star Algorithm
- (1)
- An open list: save all next reachable nodes from the current node.
- (2)
- A closed list: save already through nodes from the starting node to the current node.
- (3)
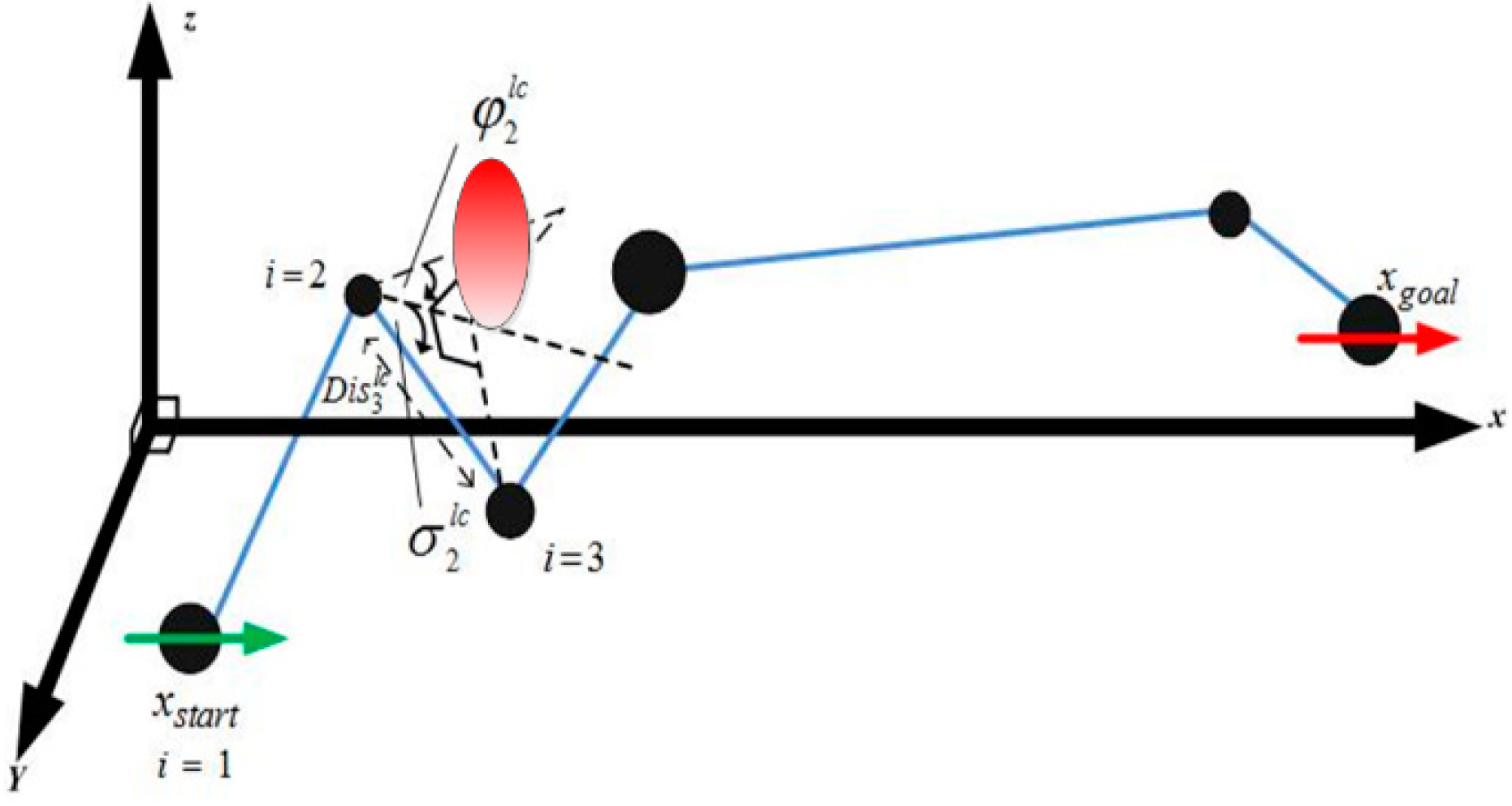
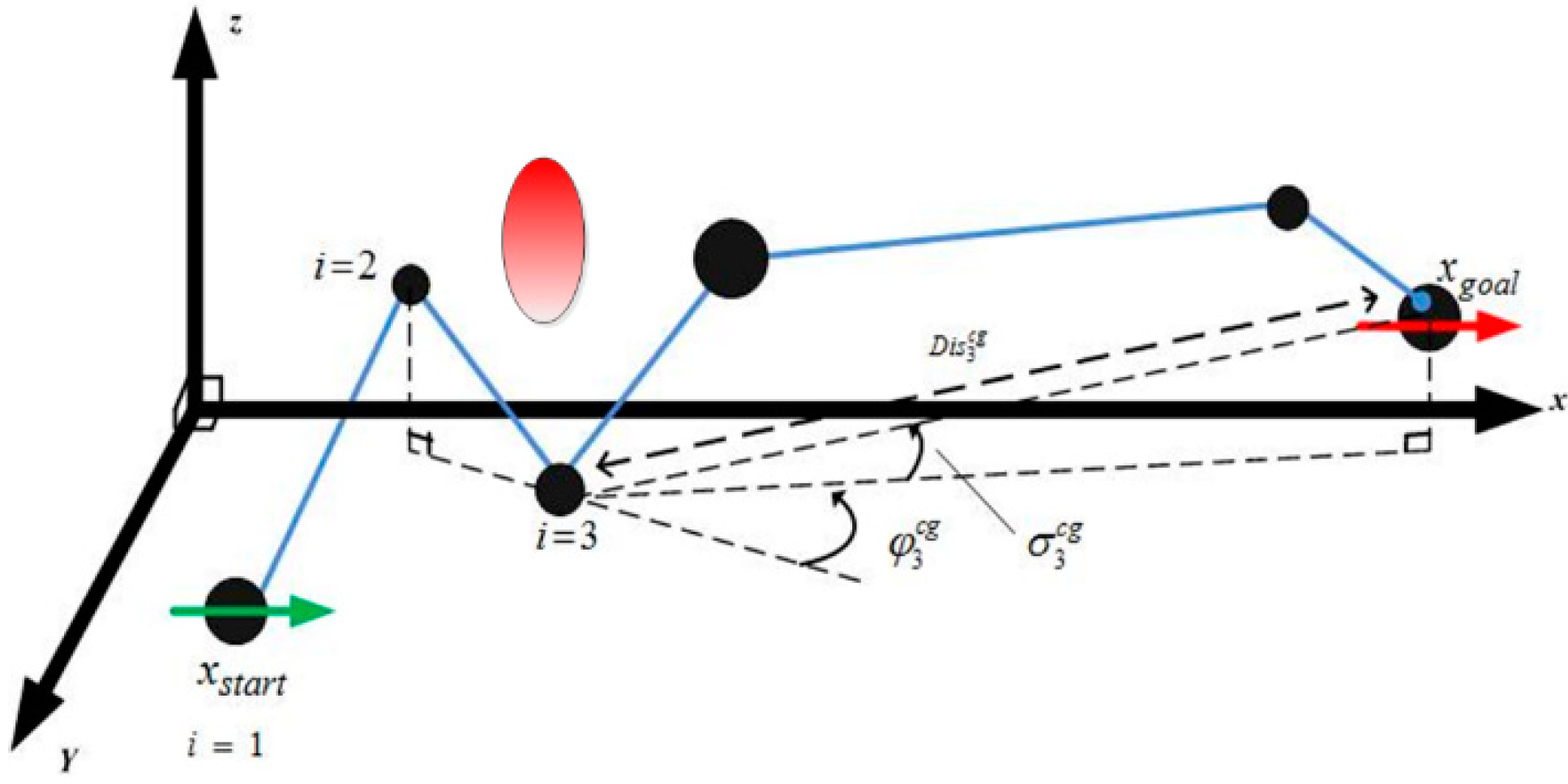
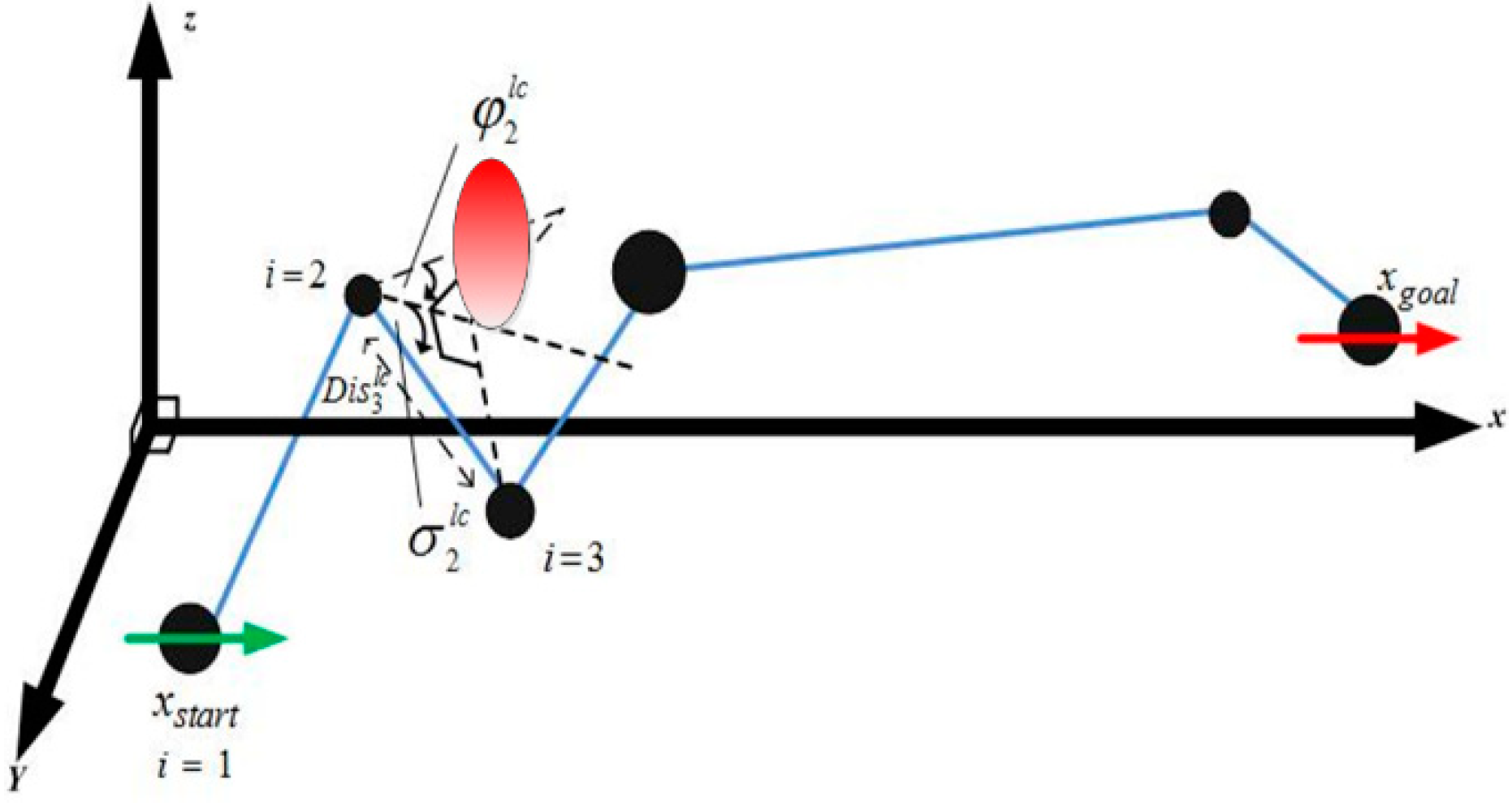
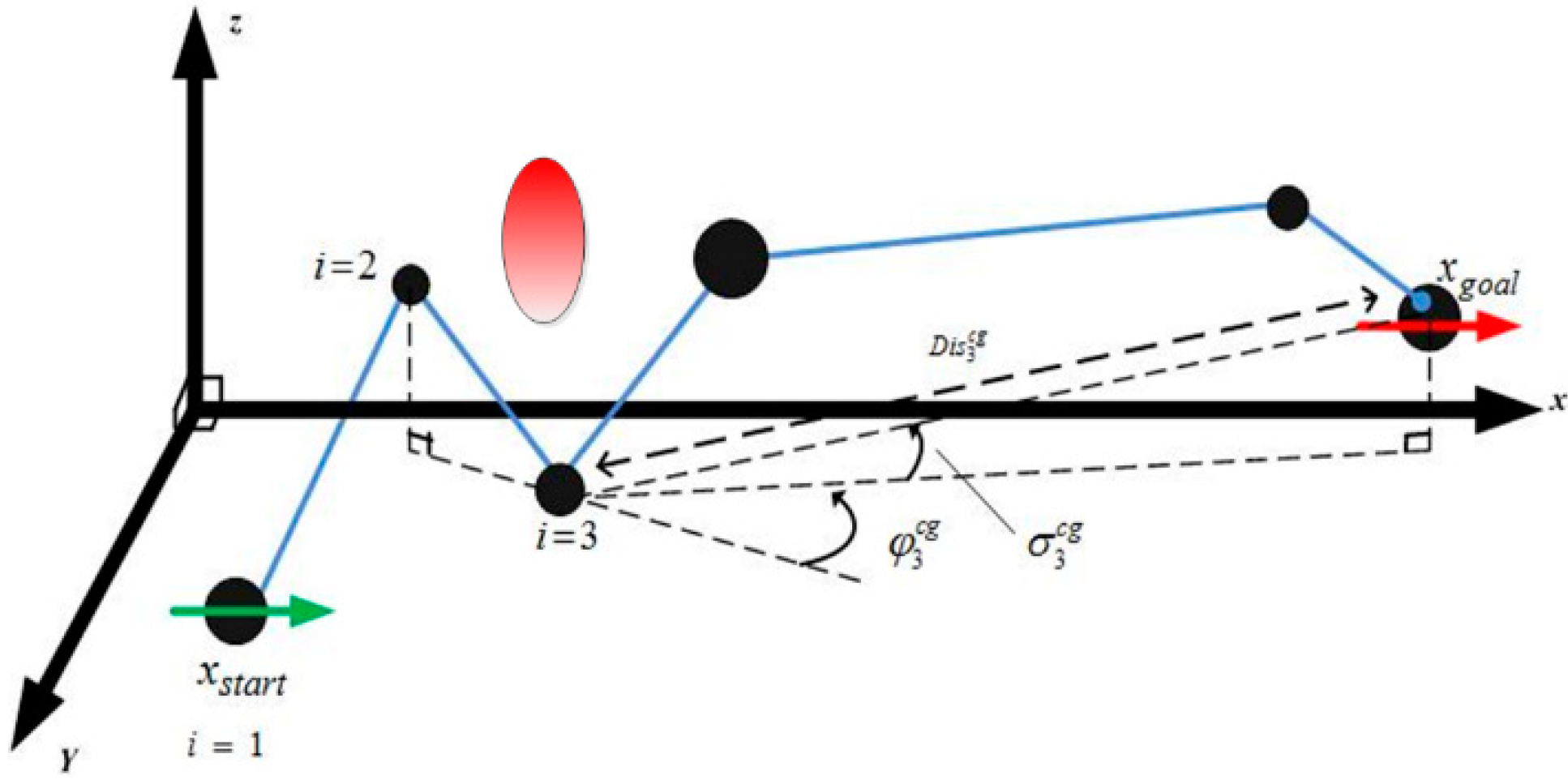
- An evaluation function: determine the order of the expanded nodes; the cost equation at each node of A-star is set as
- Step 1
- Add the starting node to the open list.
- Step 2
- Find the lowest Fi on the open list referring to the current node and add the ith to the closed list with the ith node canceled from the open list.
- Step 3
- Check whether the ith node can reach the adjacent nodes. If the ith node is not on both lists, add it to the open list. If the ith node is on the open list, and the new F is lower than the original F, then the new F refers to the original F; update the last index of the adjacent node as the current node.
- Step 4
- If the goal node is on the closed list, the path is found. If the goal node is not on the closed list, repeat Step 2. If the open list is empty, there is no available path.
- (1)
- when the climbing angle and the yaw angle are less than 90°
- (2)
- when is greater than 90° and is less than 90°
- (3)
- when is less than 90° and is greater than 90°
- (4)
- when and are greater than 90°
- (1)
- when and are less than 90°
- (2)
- when is greater than 90° and is less than 90°
- (3)
- when is less than 90° and is greater than 90°
- (4)
- when and are greater than 90°
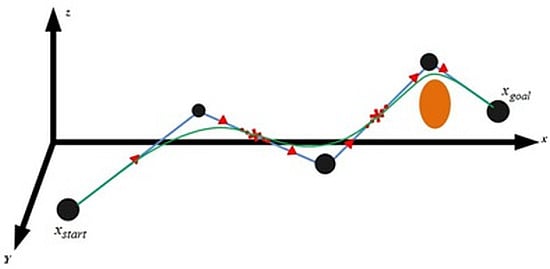
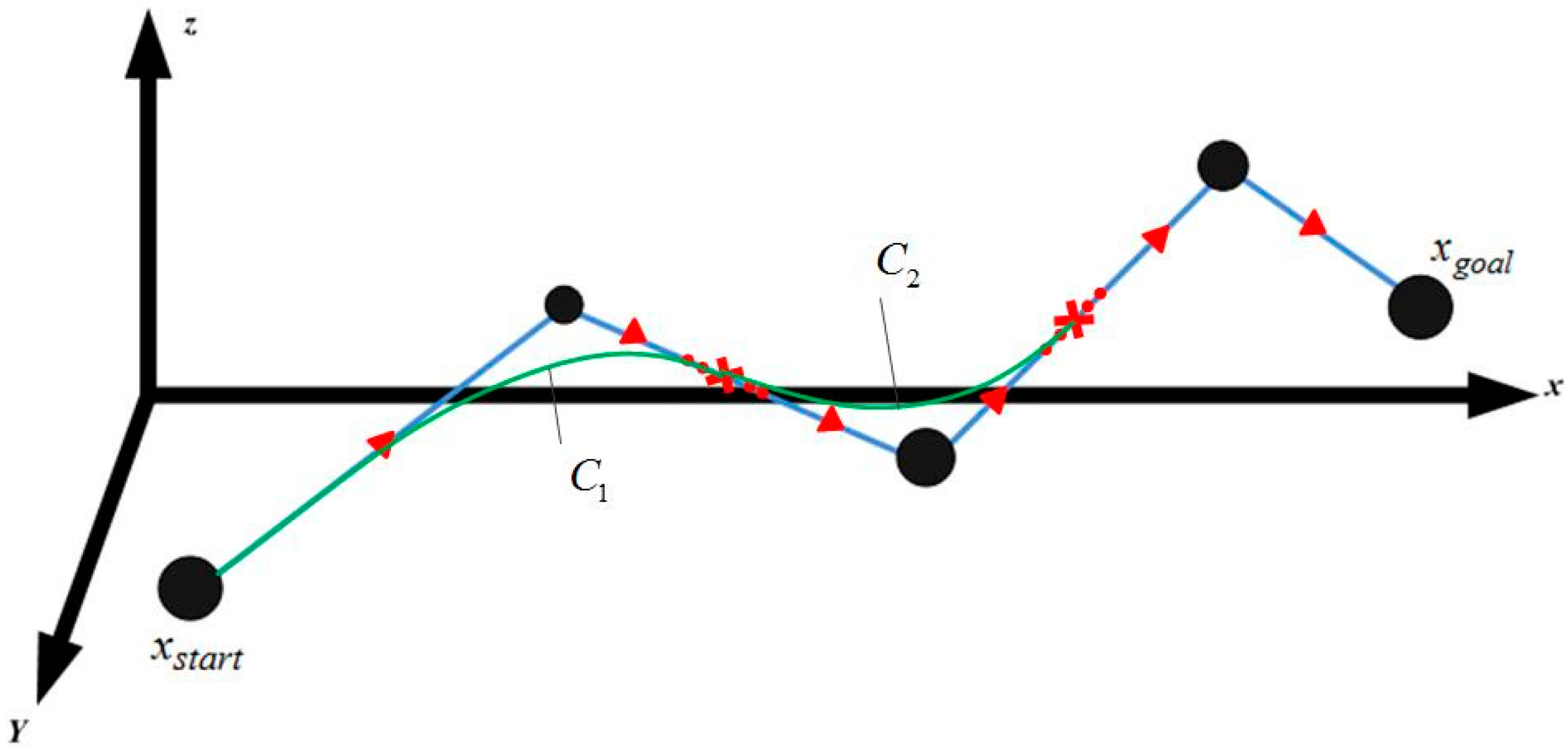
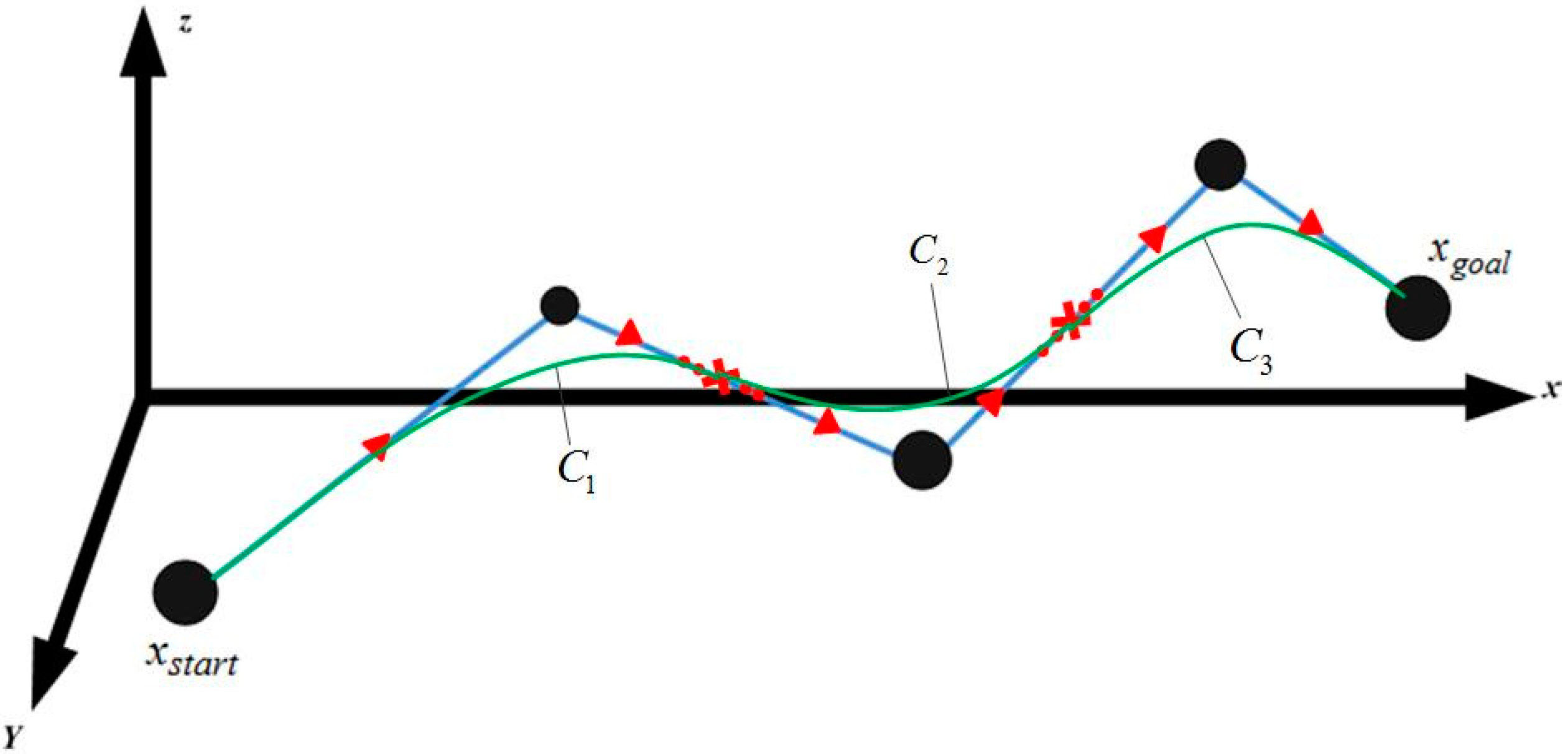
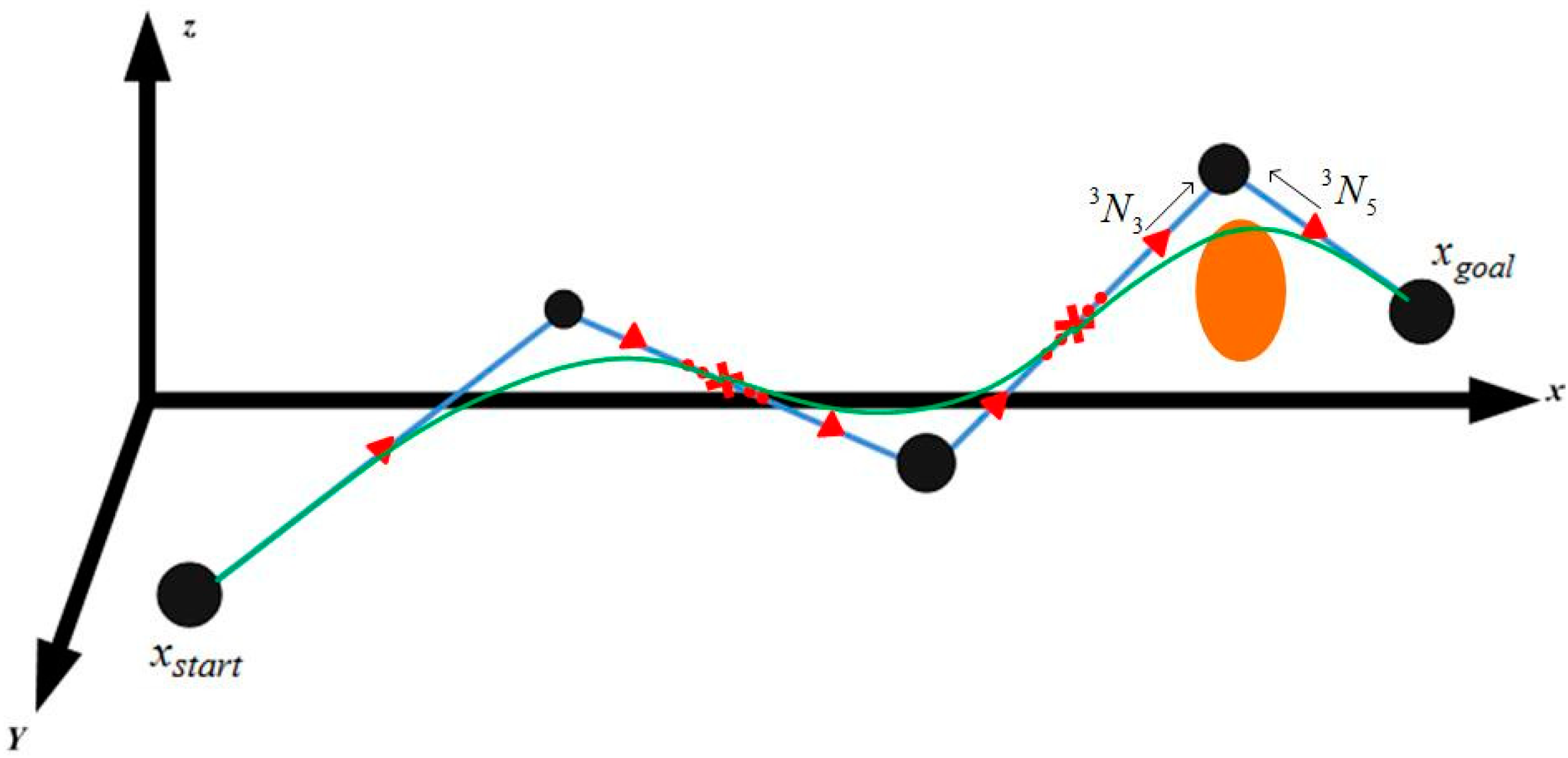
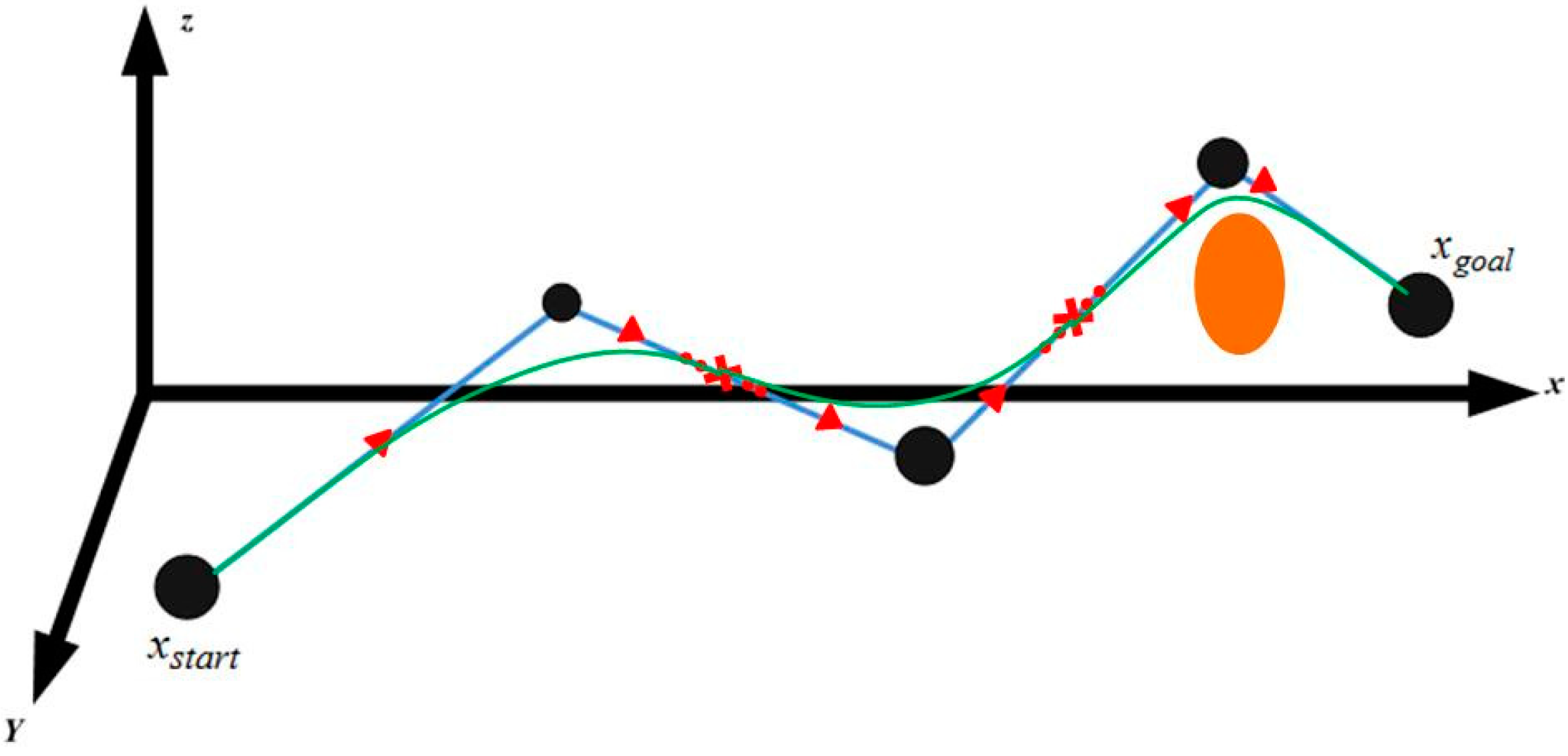
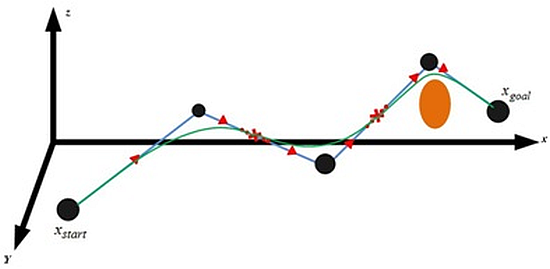
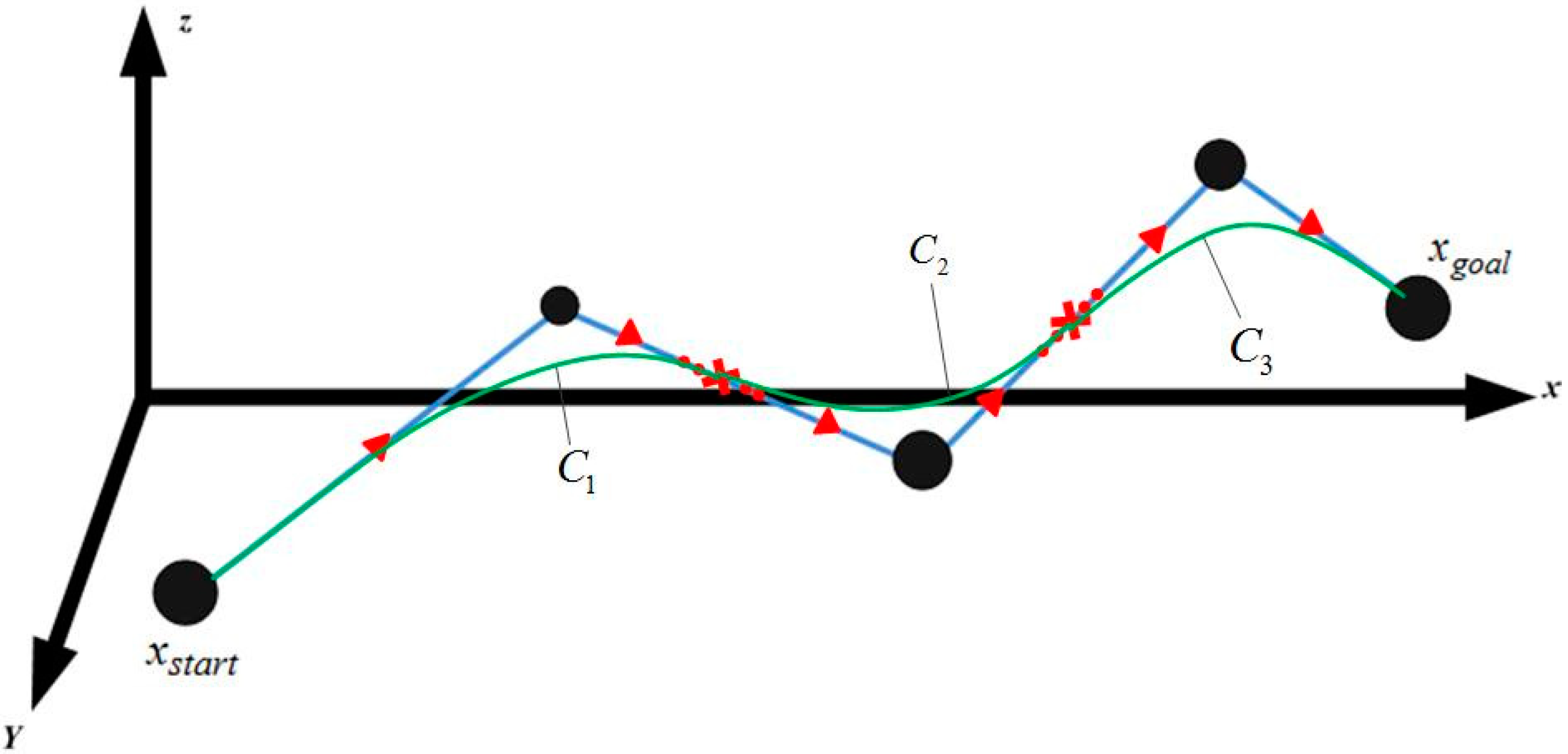
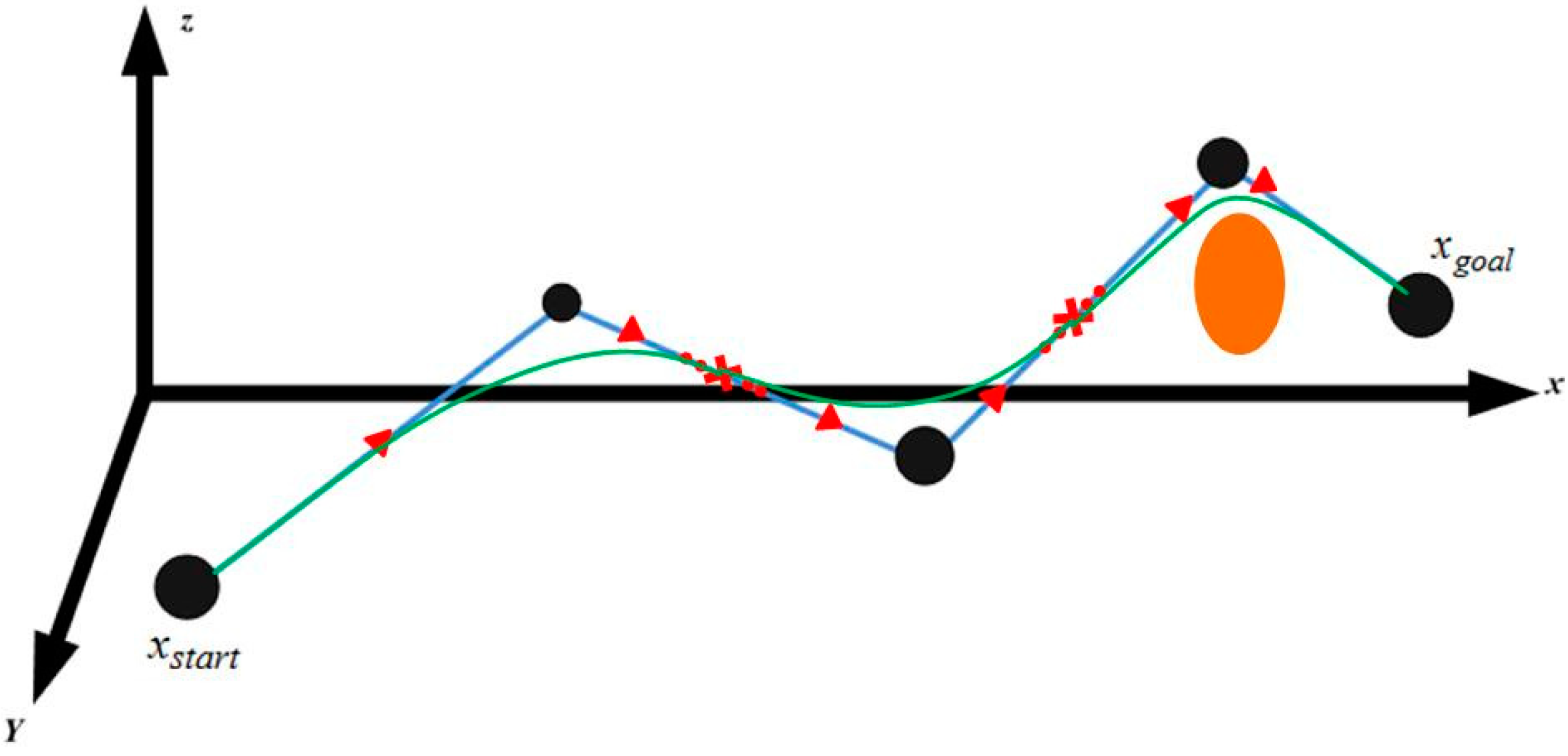
3.3. Flight Path Refinement
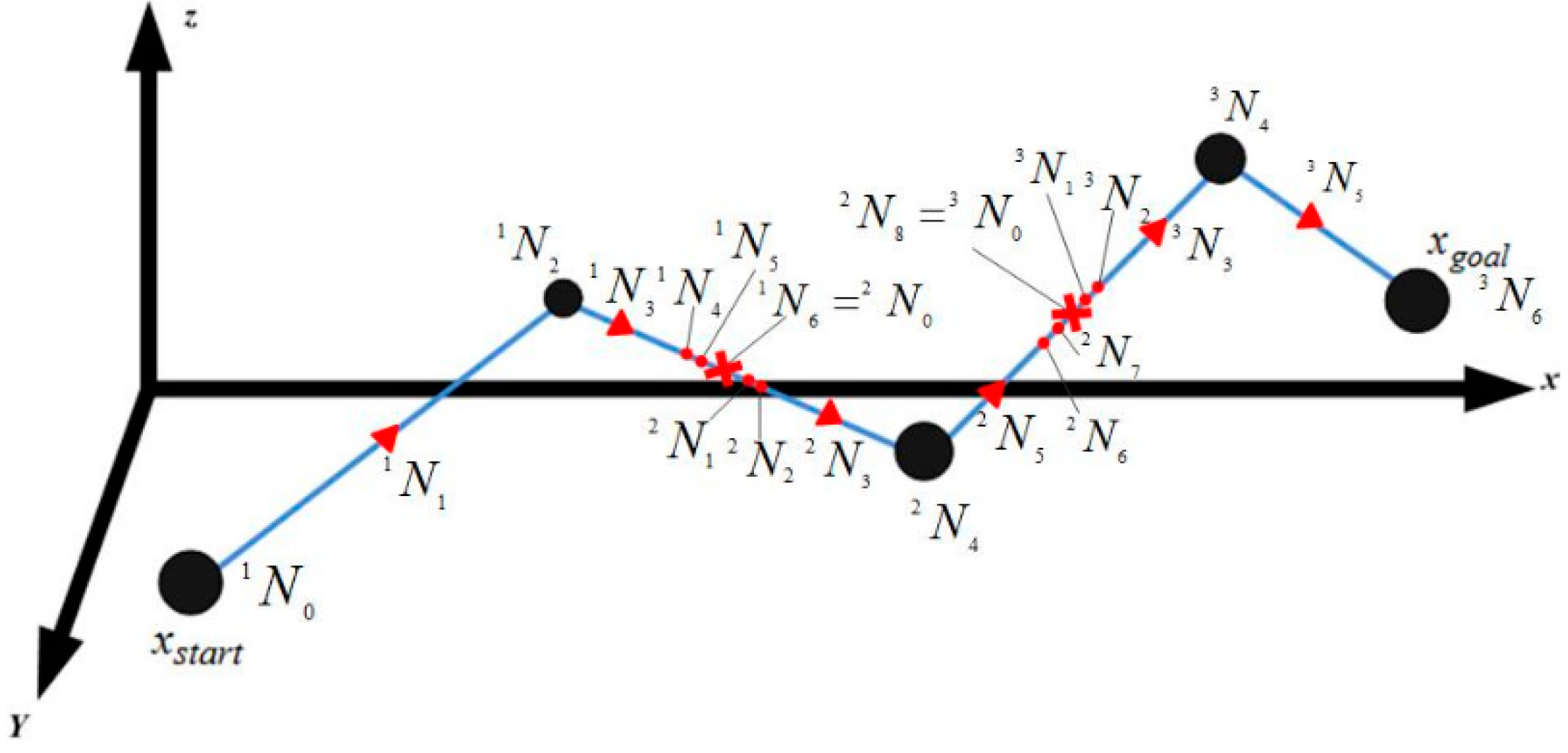
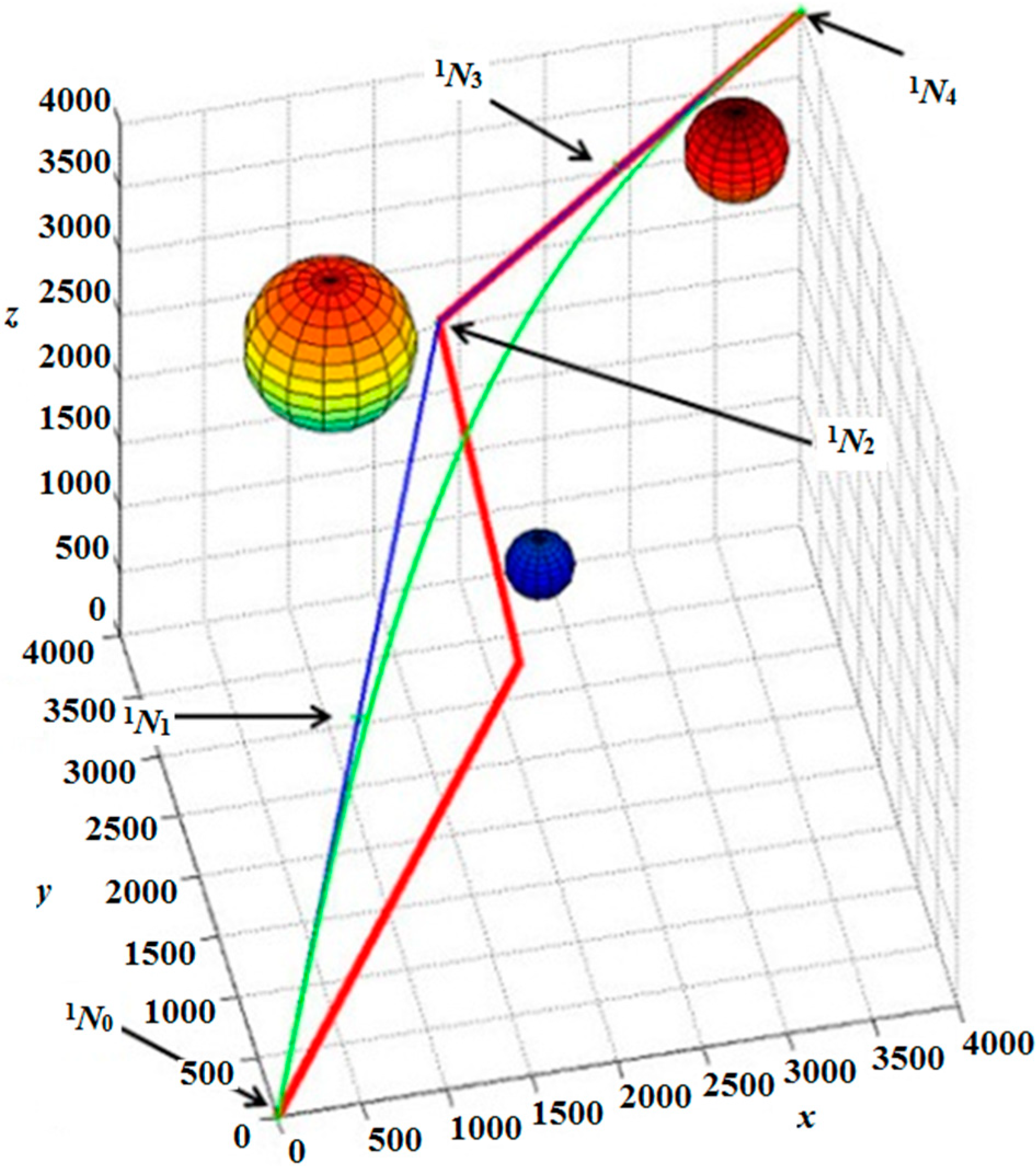
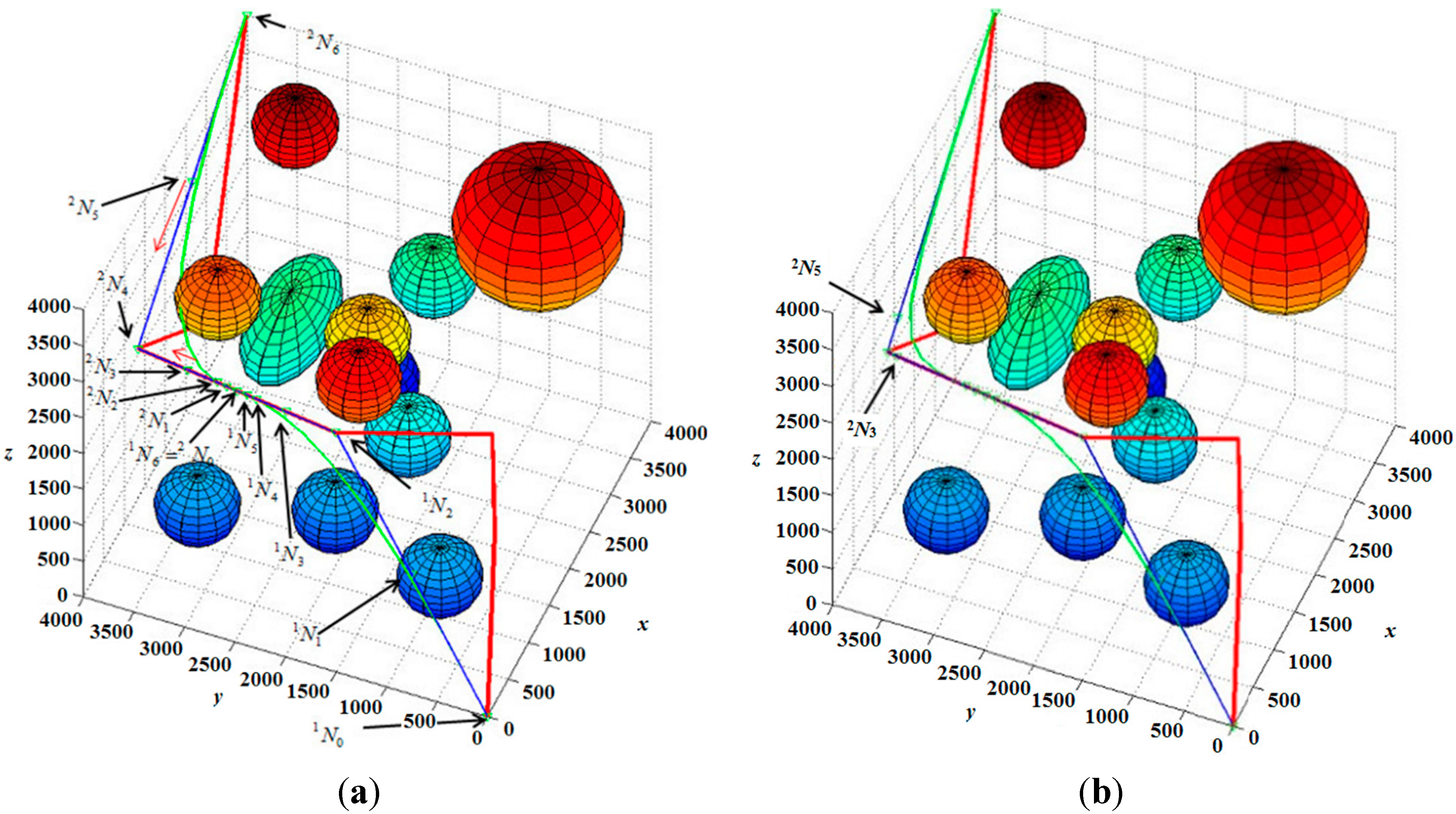
3.4. Bezier Curves
- (1)
- fixed control nodes1N0 = A11N2 = A21N4 = A3
- (2)
- movable nodes
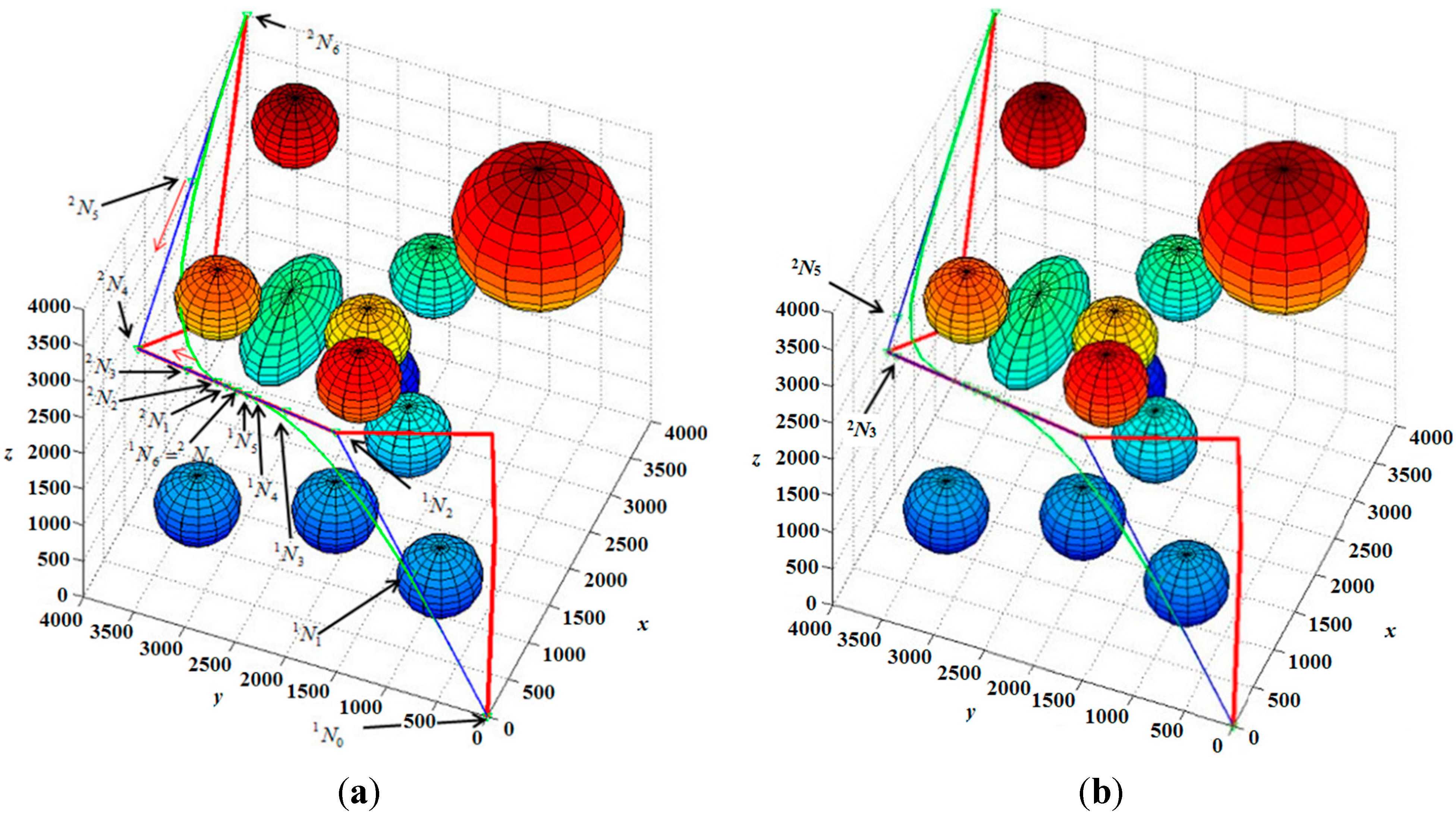
- (1)
- fixed control nodes:1N0 = A11N2 = A2m−2N4 = Am−1m−2N6 = Am
- (2)
- movable control nodes:
- (3)
- interconnected nodes:
- (1)
- fixed control nodes:
- (2)
- movable control nodes:
- (3)
- interconnected nodes:

4. Simulation Results
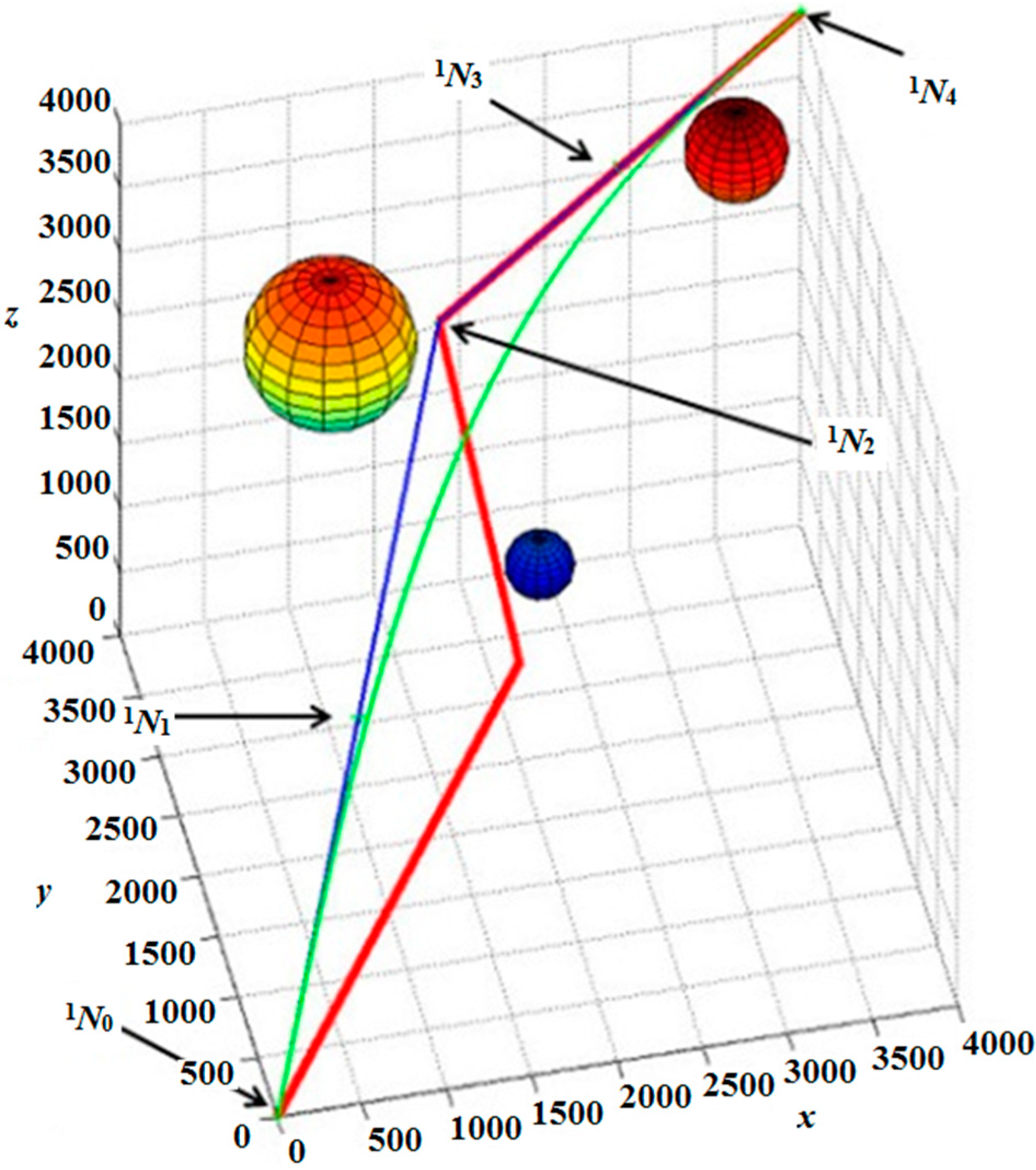
4.1. Path Planning in 3D Environment
4.1.1. Scenario 1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Path Planning Waypoints of Case 1 | |
|---|---|
| Multi-RRT Waypoints (m) | Improved A-Star Waypoints (m) |
| (0, 0, 0) | (0, 0, 0) |
| (1954.4, 2314.1, 949.1) | – |
| (1835.4, 3852.4, 2187.2) | (1835.4, 3852.4, 2187.2) |
| (4000, 4000, 4000) | (4000, 4000, 4000) |
4.1.2. Scenario 2
| Path Planning Waypoints of Case 2 | |
|---|---|
| Multi-RRT Waypoints | Improved A-Star Waypoints |
| (0, 0, 0) | (0, 0, 0) |
| (1912.0, 168.0, 998.2) | (1912.0, 168.0, 998.2) |
| (896.3, 780.5, 2840.6) | – |
| (1457.6, 685.9, 3181.4) | – |
| (1970.7, 1418.5, 3100.2) | – |
| (2546.3, 2283.6, 3708.4) | (2546.3, 2283.6, 3708.4) |
| (3647.9, 2638.7, 2909.5) | (3647.9, 2638.7, 2909.5) |
| (4000, 4000, 4000) | (4000, 4000, 4000) |
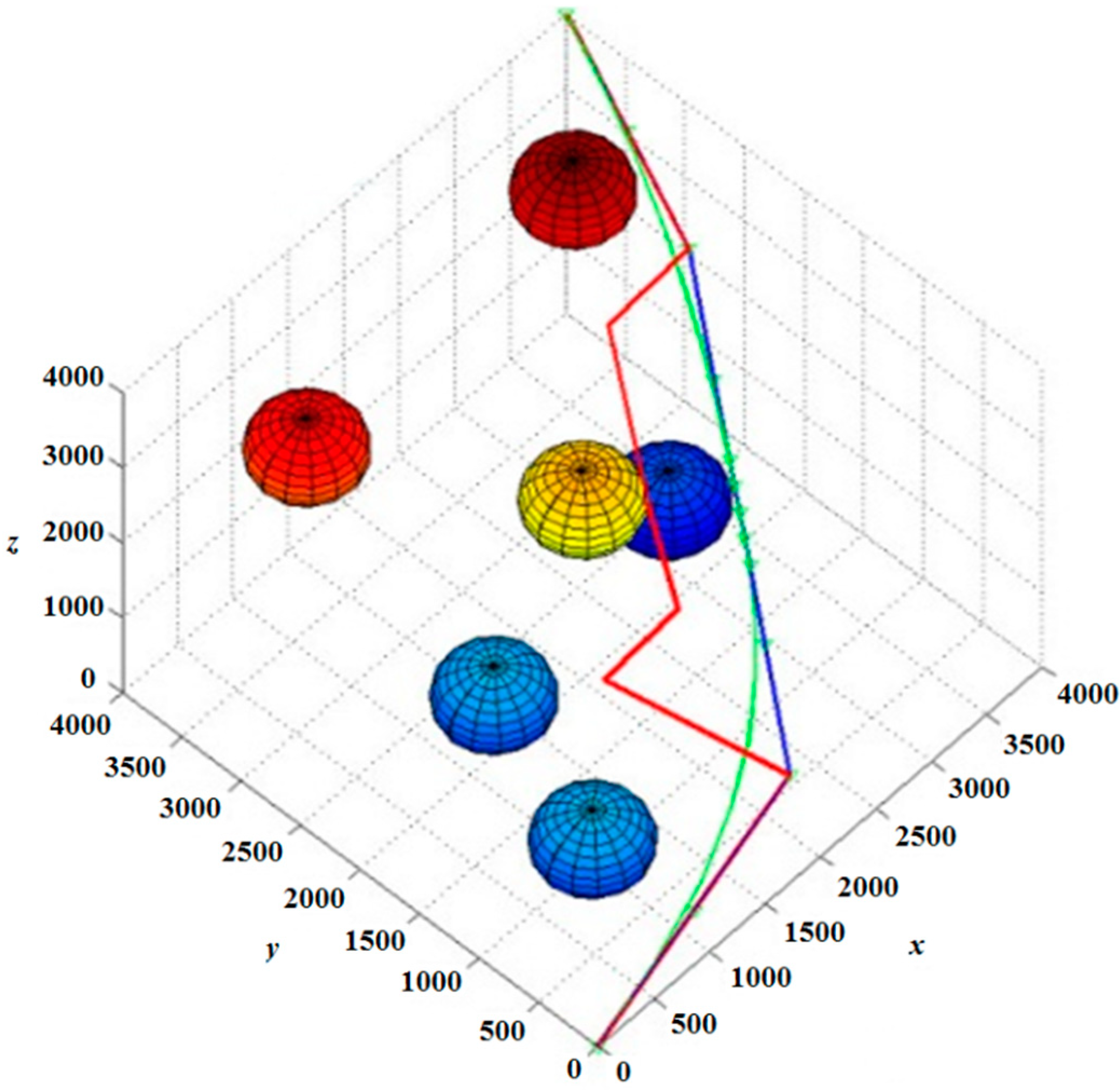
4.1.3. Scenario 3
| Path Planning Waypoints of Case 3 | |
|---|---|
| Multi-RRT Waypoints (m) | Improved A-Star Waypoints (m) |
| (0, 0, 0) | (0, 0, 0) |
| (728.6, 167.3, 427.8) | (728.6, 167.3, 427.8) |
| (2047.3, 330.4, 2878.3) | (2047.3, 330.4, 2878.3) |
| (1646.4, 2410.6, 3002.1) | – |
| (2020.5, 3962.2, 3558.8) | (2020.5, 3962.2, 3558.8) |
| (3291.3, 3888.5, 2807.2) | – |
| (4000, 4000, 4000) | (4000, 4000, 4000) |
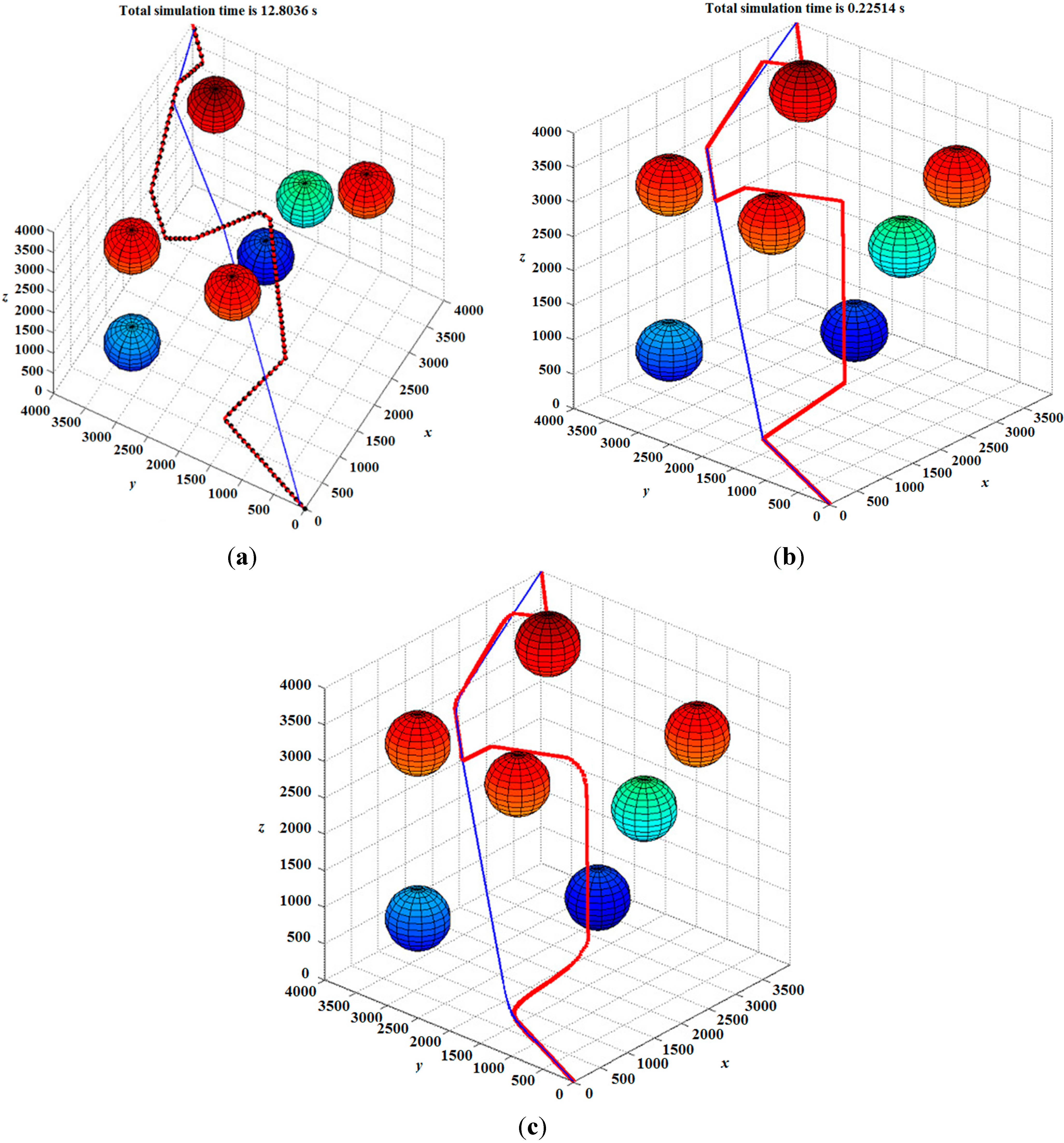
4.2. Comparison of Performance
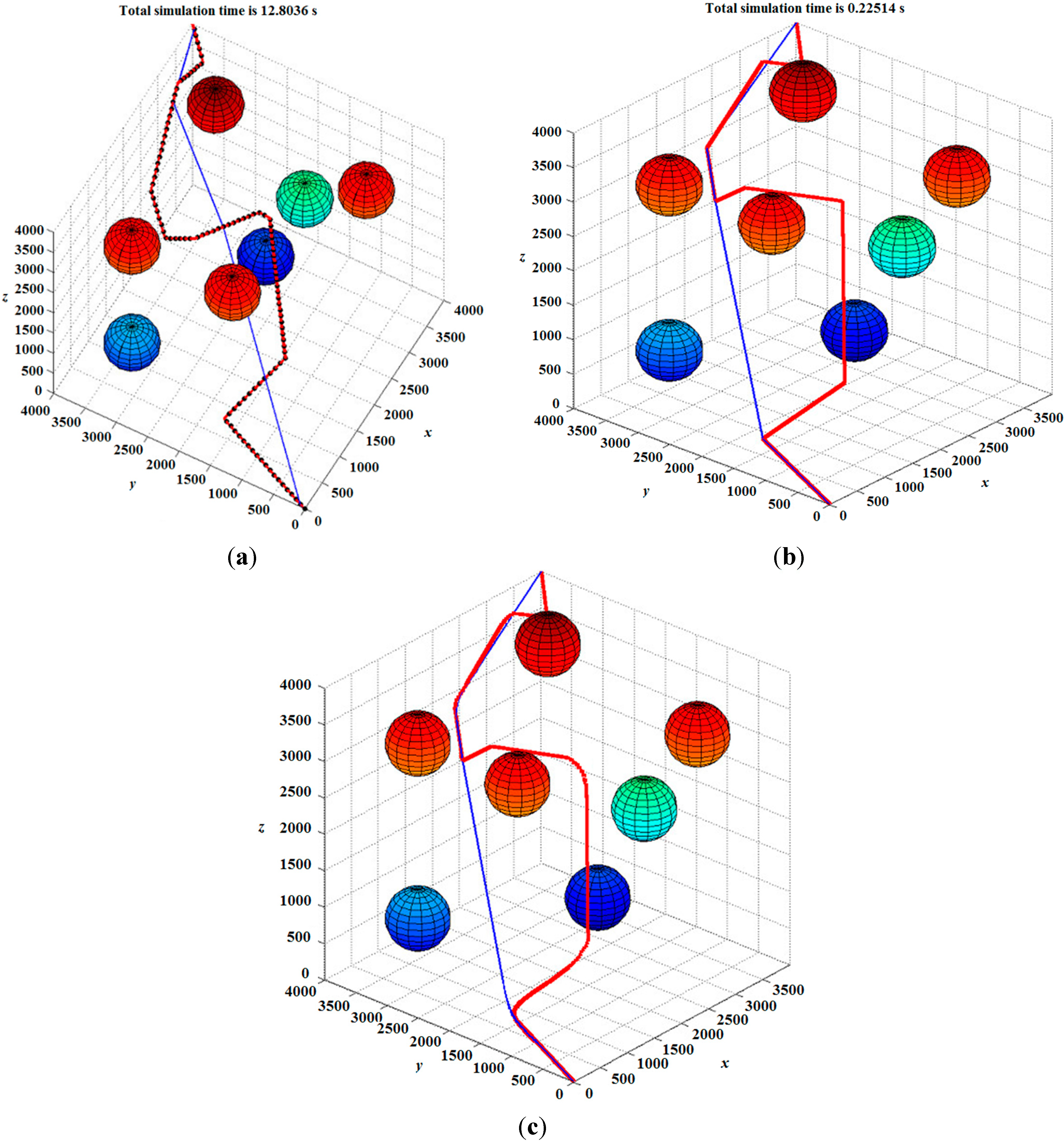
| Results of Comparison of Computation Time | |||
|---|---|---|---|
| Algorithms | RRT + Dijkstra | Multi-RRT + Improved A-Star | Multi-RRT + Improved A-Star + Bezier’s Curving Refinement |
| Total time (s) | 12.804 | 0.225 | 1.395 |
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Malaek, S.M.; Kosari, A.R. Dynamic based cost functions for TF/TA flights. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 44–63. [Google Scholar] [CrossRef]
- Guldner, J.; Utlun, V.I. Sliding mode control for gradient tracking and robot navigation using artificial potential fields. IEEE Trans. Robot. Autom. 1995, 11, 247–254. [Google Scholar]
- Malaek, S.M.; Kosari, A.R. Novel minimum time trajectory planning in terrain following flights. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 2–12. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Kurnaz, S.; Cetin, O.; Kaynak, O. Fuzzy logic based approach to design of flight control and navigation tasks for autonomous unmanned aerial vehicles. J. Intell. Robot. Syst. 2009, 54, 229–244. [Google Scholar] [CrossRef]
- Francesco, B.; Lorenzo, P.; Mario, I. Waypoint-based fuzzy guidance for unmanned aircraft a new approach. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Monterey, CA, USA, 2–8 August 2002.
- Tai, S.; Steven, J.; Andrew, G. UAV cooperative multiple task assignments using genetic algorithms. In Proceedings of the American Control Conference, Portland, OR, USA, 19–22 March 2005; pp. 8–10.
- Ashenayi, K.; Wainwright, R.L. Genetic algorithms for autonomous robot navigation. IEEE Instrum. Meas. Mag. 2007, 10, 26–31. [Google Scholar]
- Xu, W.; Liu, Y.; Liang, B.; Xu, Y.; Qiang, W. Autonomous path planning and experiment study of free-floating space robot for target capturing. J. Intell. Robot. Syst. 2008, 51, 303–331. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Incremental sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2010. arXiv:1005.0416. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J. Randomized kinodynamic planning. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999, pp. 473–479.
- Emre, K.; Kemal, N.U.; Gokhan, I. Integration of path/maneuver planning in complex environments for agile maneuvering UCAVs. J. Intell. Robot. Syst. 2010, 57, 143–170. [Google Scholar] [CrossRef]
- Kwangjin, Y.; Seng, K.G.; Salah, S. An efficient path planning and control algorithm for RUAV’s in unknown and cluttered environments. J. Intell. Robot. Syst. 2010, 57, 101–122. [Google Scholar] [CrossRef]
- Yang, K.; Sukkarieh, S. 3D smooth path planning for a UAV in cluttered natural environments. In Proceedings of 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008.
- Seunghan, L.; Hyochoong, B. Waypoint guidance of cooperative UAVs for intelligence, surveillance, and reconnaissance. In Proceedings of the IEEE International Conference on Control and Automation, Christchurch, New Zealand, 9–11 December 2009; pp. 291–296.
- Luca, F.D.; Giorgio, G.; Fulvia, Q. Path planning strategies for UAVs in 3D environments. J. Intell. Robot. Syst. 2011, 65, 1–18. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Bouktir, Y.; Haddad, M.; Chettibi, T. Trajectory planning for a multirotor helicopter. In Proceedings of 16th IEEE Mediterranean Conference on Control and Automation, Ajaccio-Corsica, France, 25–27 June 2008.
- LaValle, S.M.; Kuffner, J.J., Jr. Rapidly-exploring random trees: progress and prospects. Available online: http://citeseerx.ist.psu.edu/viewdoc/versions?doi=10.1.1.38.1387 (accessed on 14 April 2015).
- Ferguson, D.; Stentz, A. Anytime RRTs. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5369–5375.
- Franz, A.; Florian, M.A. Autonomous vision-based helicopter flights through obstacle gates. J. Intell. Robot. Syst. 2010, 57, 259–280. [Google Scholar] [CrossRef]
- Ranka, K.; Zoran, V. Methodology of concept control synthesis to avoid unmoving and moving obstacles. J. Intell. Robot. Syst. 2003, 37, 21–41. [Google Scholar] [CrossRef]
- Lai, L.C.; Yang, C.C.; Wu, C.J. Time-optimal control of a hovering quad-rotor helicopter. J. Intell. Robot. Syst. 2006, 45, 115–135. [Google Scholar] [CrossRef]
- Jaillet, L.; Cortés, J.; Siméon, T. Sampling-based path planning on configuration-space costmaps. IEEE Trans. Robot. 2010, 26, 635–646. [Google Scholar] [CrossRef] [Green Version]
- Barbehenn, M. A note on the complexity of Dijkstra’s algorithm for graphs with weighted vertices. IEEE Trans. Comput. 1998, 47, 263. [Google Scholar] [CrossRef]
- Byunghee, L.; Kabil, K. Path planning algorithm using the particle swarm optimization and the improved Dijkstra algorithm. In Proceedings of IEEE Pacific-Asia Workshop on Computational Intelligence and Industrial Application, Wuhan, China, 19–20 December 2008; Volume 2, pp. 1002–1004.
- James, W.L.; Chelsea, C.W. A best-first search algorithm guided by a set-valued heuristic. IEEE Trans. Syst. Man Cybern. 1995, 25, 1097–1101. [Google Scholar]
- Kwangjin, Y.; Sukkarieh, S. Real-Time Continuous Curvature Path Planning of UAVS in Cluttered Environments. In Proceedings of the 5th International Symposium on Mechatronics and Its Applications, Amman, Jordan, 27–29 May 2008; pp. 1–6.
- Anderson, E.P.; Beard, R.W.; McLain, T.W. Real-time dynamic trajectory smoothing for unmanned air vehicles. IEEE Trans. Control Syst. Technol. 2005, 13, 471–477. [Google Scholar] [CrossRef]
- Sujit, P.B.; Ghose, D. Search using multiple UAVs with flight time constraints. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 491–509. [Google Scholar] [CrossRef]
- Kim, S.J.; Whang, I.H. Acceleration constraints for maneuvering formation flight trajectories. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1052–1060. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, Y.; Liu, W.; Chen, X. Novel approach to position and orientation estimation in vision-based UAV navigation. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 687–700. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, Y.-J.; Lee, C.-S.; Lin, C.-L.; Huang, C.-H. Development of Flight Path Planning for Multirotor Aerial Vehicles. Aerospace 2015, 2, 171-188. https://doi.org/10.3390/aerospace2020171
Tsai Y-J, Lee C-S, Lin C-L, Huang C-H. Development of Flight Path Planning for Multirotor Aerial Vehicles. Aerospace. 2015; 2(2):171-188. https://doi.org/10.3390/aerospace2020171
Chicago/Turabian StyleTsai, Yi-Ju, Chia-Sung Lee, Chun-Liang Lin, and Ching-Huei Huang. 2015. "Development of Flight Path Planning for Multirotor Aerial Vehicles" Aerospace 2, no. 2: 171-188. https://doi.org/10.3390/aerospace2020171