


Trajectory Planning and Optimisation for Following Drone to Rendezvous Leading Drone by State Estimation with Adaptive Time Horizon



Abstract
1. Introduction
1.1. Related Works
1.2. Problem Statement
1.3. UAV Motion Models, Trajectory Prediction, Interception Strategies, and Optimisation
1.4. Contributions
2. System Architecture
2.1. State Definition
2.2. Model Definitions
2.2.1. Linear Model
2.2.2. Sinusoidal Model
2.2.3. Stochastic Motion Model
2.3. Prediction
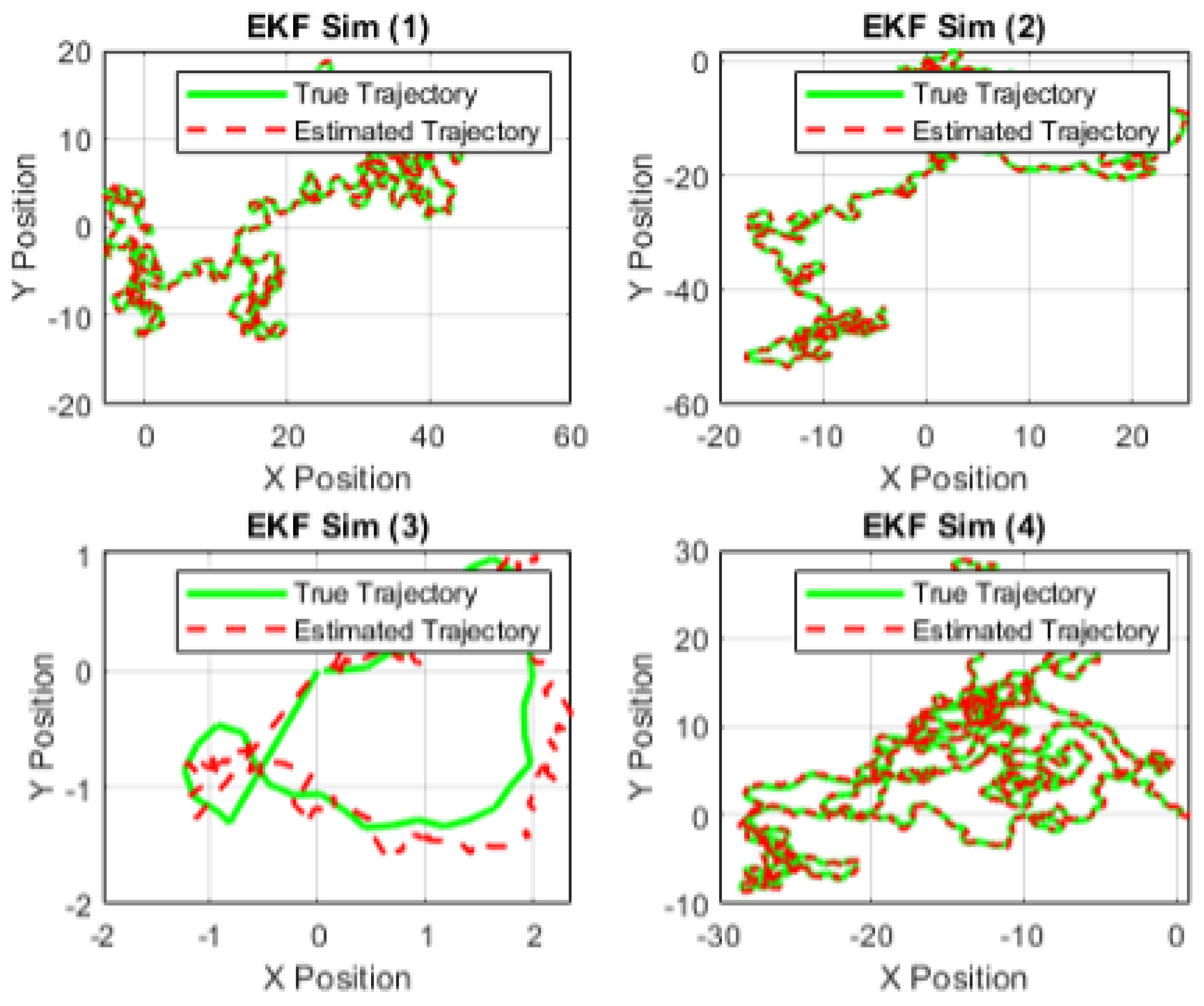
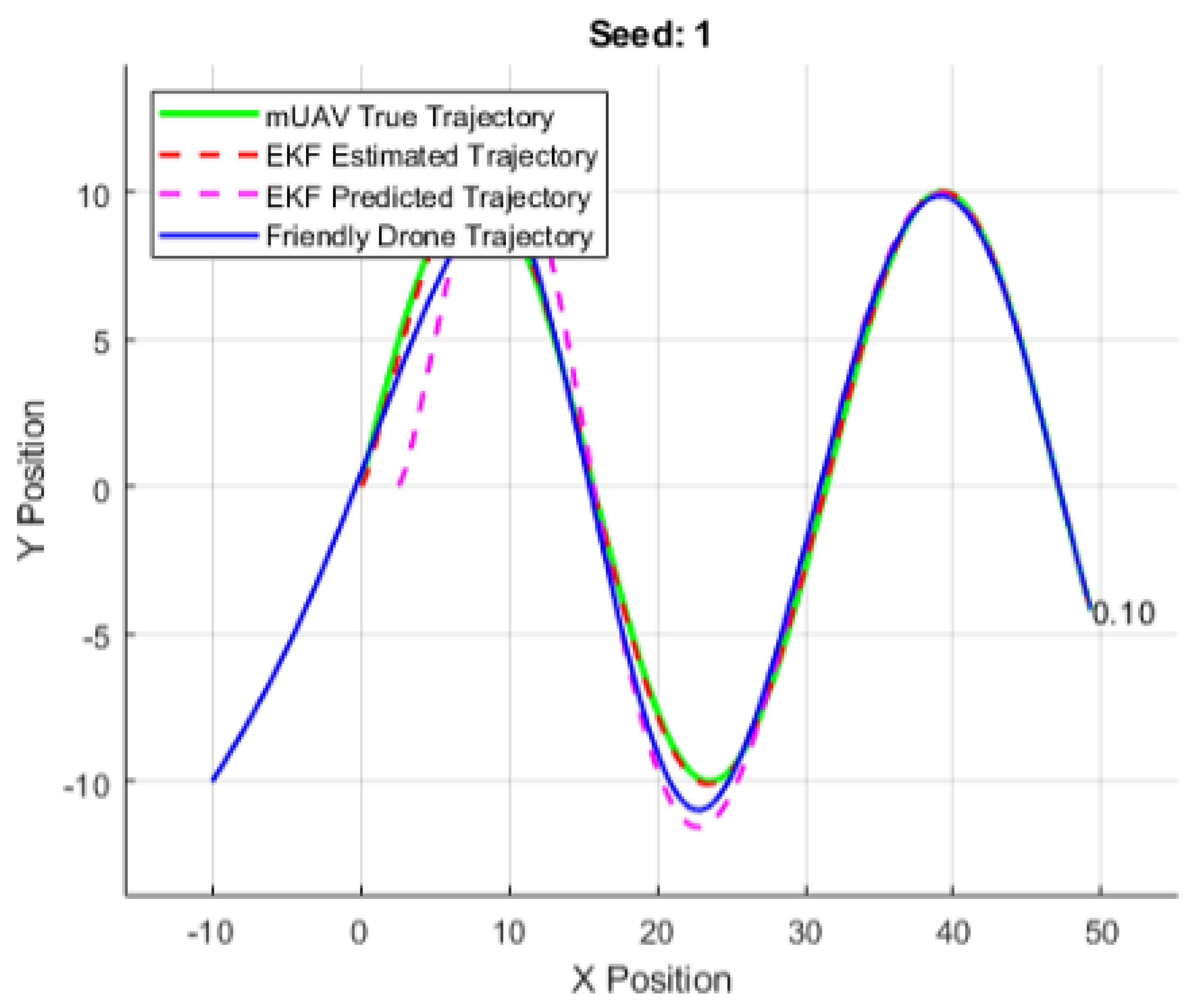
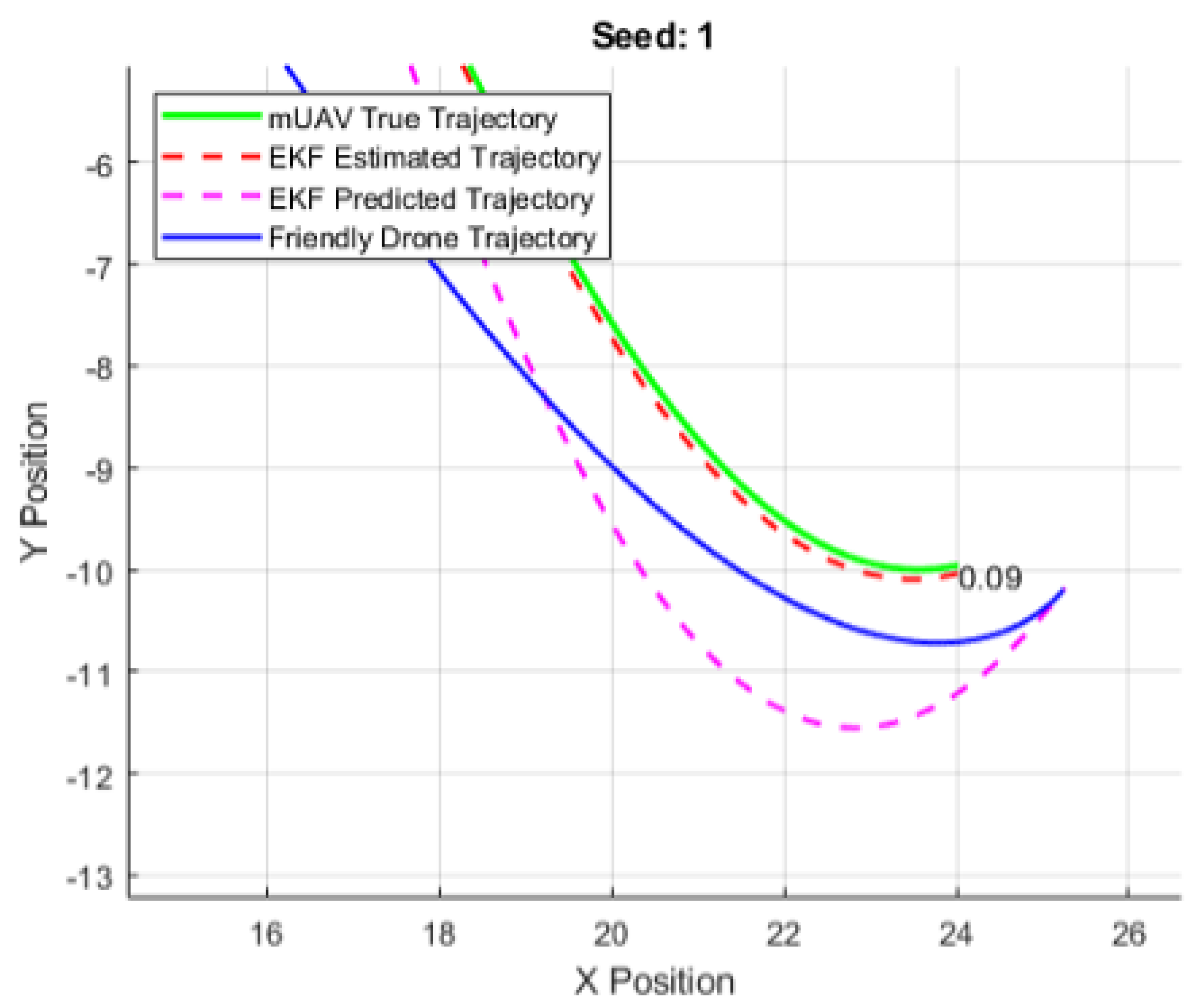
2.3.1. Extended Kalman Filter
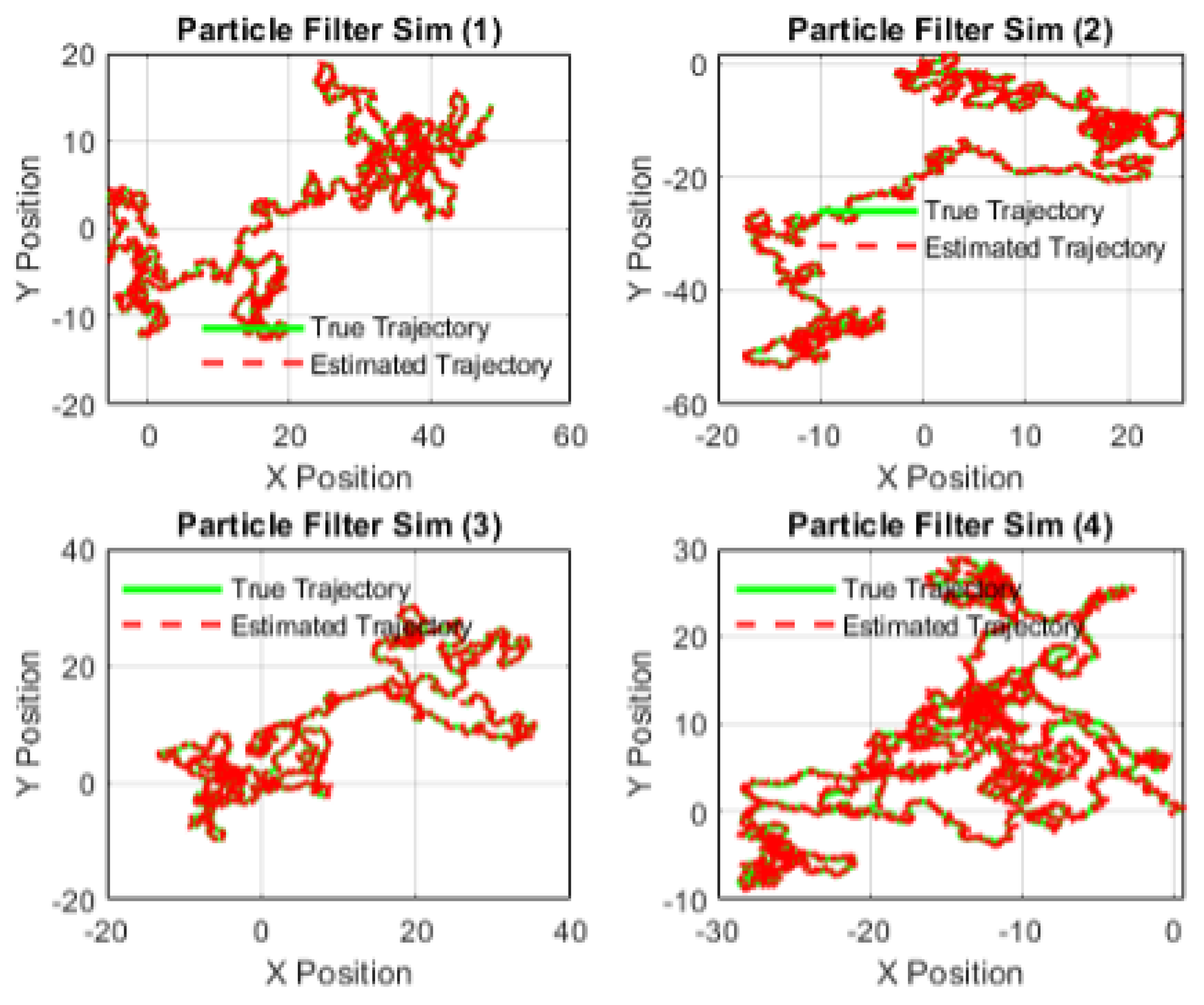
2.3.2. Probability Filter
2.4. Gaussian Noise
2.5. Neutralisation Strategy
2.6. System Overview

2.7. Methodology
2.7.1. Total System Execution Time
2.7.2. Neutralisation Rate
2.7.3. Control Measures
3. Results
3.1. Test 1
3.2. Test 2
3.3. Test 3
3.4. Test 4
3.4.1. PD Controller
3.4.2. Adaptive Time Horizon
3.4.3. Dynamic Velocity Control
3.5. Test 5
3.6. Analysis
3.7. Performance on Linear Trajectory Models
3.8. Performance on Stochastic Trajectory Models
3.9. Performance on Stochastic Trajectory Models with Enhancements
4. Discussion
4.1. Interpretation of Results
4.2. Theoretical Implications and Practical Relevance
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ATH | Adaptive Time Horizon |
| C-UAS/CUAS | Counter Unmanned Aerial System |
| DOAJ | Directory of Open Access Journals |
| EKF | Extended Kalman Filter |
| LQR | Linear Quadratic Regulator |
| MDPI | Multidisciplinary Digital Publishing Institute |
| MPC | Model Predictive Control |
| mUAV | Malicious Unmanned Aerial Vehicle |
| NR | Neutralisation Rate |
| PD | Proportional–Derivative Controller |
| PF | Probability Filter |
| PID | Proportional–Integral–Derivative Controller |
| PNG | Proportional Navigation |
| RHC | Receding Horizon Control |
| TSET | Total System Execution Time |
| UAV | Unmanned Aerial Vehicle |
| VC | Velocity Control |
References
- Moreira, M.; Papp, E.; Ventura, R. Interception of non-cooperative UAVs. In Proceedings of the 2019 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Würzburg, Germany, 2–4 September 2019. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 1997. [Google Scholar]
- Xu, X.; Li, C.; Zhuge, S.; Zhao, Z.; Yang, X.; Khoo, B.C.; Srigrarom, S.; Zhang, X. A buddy temporal-spatial calibration method for airborne sensors in multi-UAV systems. IEEE Robot. Autom. Lett. 2024, 9, 7365–7372. [Google Scholar] [CrossRef]
- Abbas, M.T.; Jibran, M.A.; Afaq, M.; Song, W.-C. An adaptive approach to vehicle trajectory prediction using multimodel Kalman filter. Trans. Emerg. Telecommun. Tech. 2020, 31, e3734. [Google Scholar] [CrossRef]
- Zhu, B.; Bin, Zaini, A.H.; Xie, L. Distributed guidance for interception by using multiple rotary-wing unmanned aerial vehicles. IEEE Trans. Ind. Electron. 2017, 64, 5648–5656. [Google Scholar] [CrossRef]
- Wang, H.; Shi, Y. Design of uav target tracking controller based on visual servo. J. Phys. Conf. Ser. 2022, 2246, 012051. [Google Scholar] [CrossRef]
- Chen, C.W.; Hung, H.A.; Yang, P.H.; Cheng, T.H. Visual servoing of a moving target by an unmanned aerial vehicle. Sensors 2021, 21, 5708. [Google Scholar] [CrossRef] [PubMed]
- Jing, Z.; Pan, H.; Li, Y.; Dong, P. Non-Cooperative Target Tracking, Fusion and Control; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Chan, W.K.; Srigrarom, S. Image-based visual-servoing for air-to-air drone tracking & following with model predictive control. In Proceedings of the 2023 SICE International Symposium on Control Systems (SICE ISCS), Kusatsu, Japan, 9–11 March 2023. [Google Scholar]
- Xia, B.; Mantegh, I.; Xie, W. UAV Multi-Dynamic Target Interception: A Hybrid Intelligent Method Using Deep Reinforcement Learning and Fuzzy Logic. Drones 2024, 8, 226. [Google Scholar] [CrossRef]
- Song, X.; Yang, R.; Yin, C.; Tang, B. A cooperative aerial interception model based on multi-agent system for uavs. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; pp. 873–882. [Google Scholar]
- Prevost, J.; Desbiens, A.; Gagnon, E. Extended Kalman Filter for state estimation and trajectory prediction of a moving object detected by an unmanned aerial vehicle. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007. [Google Scholar]
- Lymperopoulos, I.; Lygeros, J. Adaptive aircraft trajectory prediction using particle filters. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Honolulu, HI, USA, 18–21 August 2008. [Google Scholar] [CrossRef]
- Ribeiro, M.I. Kalman and Extended Kalman Filters: Concept, Derivation, and Properties; Institute for Systems and Robotics, Instituto Superior Técnico: Lisbon, Portugal, 2004; Available online: https://www.researchgate.net/publication/2888846 (accessed on 1 March 2025).
- Yang, Y.; Liu, X.; Zhang, W.; Liu, X.; Guo, Y. A Nonlinear Double Model for Multisensor-Integrated Navigation Using the Federated EKF Algorithm for Small UAVs. Sensors 2020, 20, 2974. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter | Neutralisation Rate | Total System Execution Time |
|---|---|---|
| EKF | 41% | 0.018985 s |
| PF | 30% | 0.744519 s |
| Filter | Neutralisation Rate | Total System Execution Time |
|---|---|---|
| EKF | 5% | 0.029824 s |
| PF | 5% | 9.508687 s |
| Filter | Neutralisation Rate | Total System Execution Time |
|---|---|---|
| EKF | 98% | 0.011710 s |
| Filter | Neutralisation Rate | Total System Execution Time |
|---|---|---|
| EKF Linear | 41% | 0.018985 s |
| PF Linear | 30% | 0.744519 s |
| EKF Stochastic | 5% | 0.029824 s |
| PF Stochastic | 5% | 9.508687 s |
| EKF Stochastic (ATH and VC) | 98% | 0.011710 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee Hongrui, J.; Srigrarom, S. Trajectory Planning and Optimisation for Following Drone to Rendezvous Leading Drone by State Estimation with Adaptive Time Horizon. Aerospace 2025, 12, 606. https://doi.org/10.3390/aerospace12070606
Lee Hongrui J, Srigrarom S. Trajectory Planning and Optimisation for Following Drone to Rendezvous Leading Drone by State Estimation with Adaptive Time Horizon. Aerospace. 2025; 12(7):606. https://doi.org/10.3390/aerospace12070606
Chicago/Turabian StyleLee Hongrui, Javier, and Sutthiphong Srigrarom. 2025. "Trajectory Planning and Optimisation for Following Drone to Rendezvous Leading Drone by State Estimation with Adaptive Time Horizon" Aerospace 12, no. 7: 606. https://doi.org/10.3390/aerospace12070606
APA StyleLee Hongrui, J., & Srigrarom, S. (2025). Trajectory Planning and Optimisation for Following Drone to Rendezvous Leading Drone by State Estimation with Adaptive Time Horizon. Aerospace, 12(7), 606. https://doi.org/10.3390/aerospace12070606