

Intelligent 5G-Aided UAV Positioning in High-Density Environments Using Neural Networks for NLOS Mitigation



Abstract
1. Introduction
- Neural network-based position correction: We design and implement a fully connected feedforward neural network (FNN) to correct 3D position estimates derived from 5G Time of Arrival (TOA) measurements. This approach differs from existing methods by learning the complex relationship between estimated and actual positions, rather than relying on predetermined error models that often fail in dynamic urban environments.
- Comprehensive simulation framework: We develop a simulation environment that incorporates both LOS and NLOS conditions, ensuring robustness and practical applicability in real-world urban environments. Unlike previous studies that focus primarily on ideal or simplified conditions, our framework accounts for the complex signal propagation characteristics encountered in dense urban settings.
- Real-time correction mechanism: We implement a real-time correction system that demonstrates significant improvements in positioning accuracy, outperforming traditional GNSS-based and hybrid methods. Our approach achieves a mean absolute error (MAE) of 1.3 m in LOS conditions and 1.7 m in NLOS conditions, representing substantial improvements over conventional techniques.
- Extensive performance evaluation: We conduct a thorough evaluation of the proposed framework using MAE and root mean squared error (RMSE) metrics, demonstrating the potential of this approach for scalable and resilient UAV navigation across various urban scenarios and conditions.
- This research uses the unique characteristics of 5G signals and combines them with advanced neural network architectures to provide a scalable solution to the limitations of existing UAV positioning systems. These innovations enable the wider adoption of UAM technologies by supporting precise and reliable navigation in densely populated urban environments. Our approach combines 5G positioning techniques with machine learning to create a robust UAV positioning system. The implementation follows a three stage process:
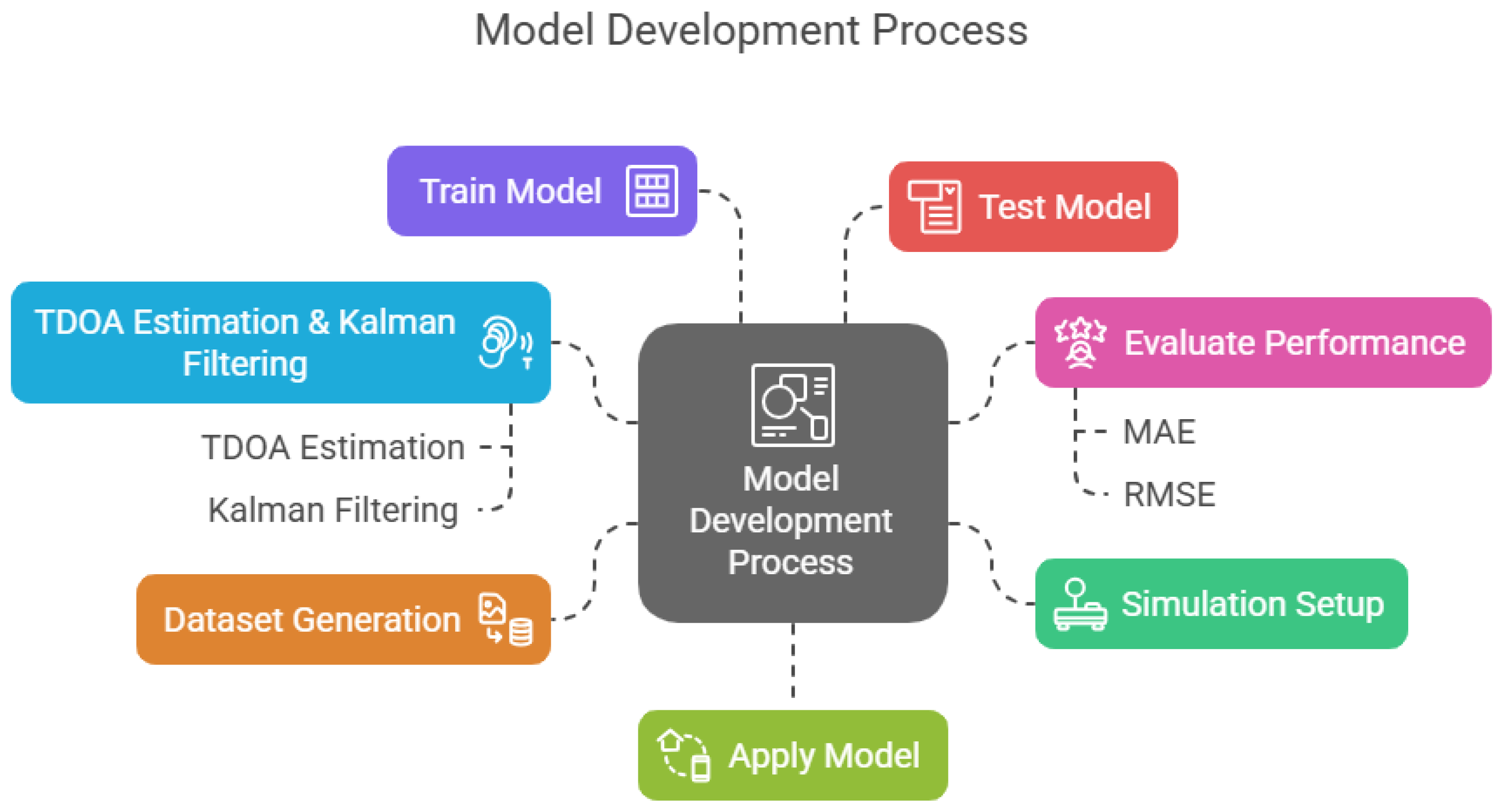
- Data generation and simulation: We use MATLAB’s UAV simulation environment to generate a comprehensive dataset that includes estimated coordinates derived from 5G TOA measurements and the corresponding actual positions (ground truth). The simulation incorporates realistic urban scenarios with varying degrees of signal obstruction, multipath propagation, and NLOS conditions to ensure the robustness of the model in real-world environments.
- Neural network architecture and training: A fully connected feedforward neural network (FNN) is implemented to learn the complex mapping between estimated and actual UAV positions. The architecture includes multiple hidden layers with appropriate non-linear activation functions to effectively capture spatial relationships within the data. The network is trained using supervised learning, with estimated coordinates as inputs and true positions as target outputs.
- Performance evaluation framework: We evaluate the model performance using standard evaluation metrics, including MAE and RMSE, in a variety of scenarios. Our method is benchmarked against traditional approaches, such as 5G TOA combined with Kalman filtering, to quantify improvements in accuracy and reliability, particularly under challenging NLOS conditions.
- The results indicate that our neural network-based correction mechanism significantly improves positioning accuracy in both LOS and NLOS conditions, with MAE values of 1.3 m and 1.7 m, respectively, and an RMSE of approximately 2.3 m. These findings highlight the potential of combining 5G positioning data with deep learning to enhance UAV navigation in urban settings, addressing the limitations of traditional GNSS-based methods in dense urban environments and offering a robust solution for future UAV advancements.
2. Related Work
- High positioning accuracy often requires a dense network of 5G base stations, which may only be available in some areas, and not available in, for example, rural or less-developed regions.
- 5G PRS is less susceptible to multipath errors than GNSS, but urban environments can still introduce significant signal reflections and obstructions that affect positioning accuracy.
- Techniques like carrier phase measurements and multi-frequency ranging require sophisticated hardware and signal processing capabilities, increasing the complexity and cost of UAV systems.
- Advanced signal processing and communication with multiple base stations can increase the energy consumption of UAVs, which is a critical consideration given their limited battery capacity [21].
- The advent of 5G has enabled the development of novel positioning techniques using ML algorithms. ML-based methods for 5G positioning were explored, including neural networks and random forest regression, demonstrating their effectiveness in handling NLOS conditions using the measurement of the signal beam power [22]. This work highlights the potential of ML to achieve sub-10 m accuracy in urban environments. Similarly, a software-defined receiver has been proposed, incorporating ML for TOA estimation in indoor environments, achieving high pseudorange measurement accuracy even under multipath conditions [23]. These studies lay the foundation for the incorporation of ML to better cope with NLOS conditions. Our work extends this by utilizing 5G PRS data to enhance UAV positioning accuracy in dense urban environments. In another approach, DL architectures have shown significant promise in improving positioning accuracy. A temporal convolutional network was proposed for millimeter-wave positioning, achieving sub-2 m accuracy in outdoor NLOS scenarios. The method uses beam-formed fingerprints to extract spatial information from received signals, outperforming traditional geometry-based methods [24]. The application of RF fingerprinting combined with DL-assisted positioning in 5G has achieved mean positioning errors of 1 to 1.5 m in urban scenarios [25]. These DL-based methods illustrate the potential to extract complex features for positioning. This work builds on this by utilizing fully connected neural networks trained on 5G PRS data to improve UAV positioning accuracy in urban settings. In recent research, hybrid positioning methods that combine 5G signals with other technologies such as GNSS have gained attention for their improved accuracy. A hybrid approach supervised by ML that fuses GNSS and 5G signals has been proposed [12]. By classifying LOS and NLOS links using features extracted from both signal types, sub-30 cm accuracy was achieved indoors and sub-2 m accuracy for 90% of positioning fixes in urban scenarios [26].
- We propose a lightweight, fully connected neural network that corrects 5G TDOA-based positions without relying on additional sensors, making the system more scalable and energy efficient for UAVs.
- Our dataset includes systematically simulated LOS and NLOS urban flight scenarios based on 3GPP TR 38.901 models—most studies focus on static or ideal LOS settings.
- Unlike earlier models, which generalize poorly under fluctuating noise, our architecture integrates statistical outlier filtering, NLOS labeling, and adaptive neural corrections for robust, real-time performance.
- Although 5G PRS signal patterns were modeled under standard 3GPP conditions, practical issues such as synchronization delays, cell handovers, and RF interference were not explicitly simulated. These factors could degrade TOA reliability and will be explored in future experiments with hardware-in-the-loop setups or field tests. These contributions differentiate our framework as a scalable, simulation-validated solution suitable for real-time UAV tracking solely based on the 5G positioning inputs.
3. System Design and Implementation
3.1. Urban Environment and Simulation Setup
- Simulation parameters such as building density, PRS configuration, and urban propagation models were chosen to reflect realistic 5G deployments, as summarized in Table 1.
- While the simulation includes LOS/NLOS-dependent path loss, multipath fading, and receiver noise, it excludes some advanced physical-layer effects such as log-normal shadowing, inter-cell interference, and Doppler spread. These factors have been shown to introduce localization errors even at low UAV speeds (5–15 m/s) in prior studies [32,33,34]. Their impact is moderate under controlled conditions, which supports our phased approach: starting with an idealized environment to validate algorithm performance. Future work will incorporate these effects through extended simulations and hardware-in-the-loop testing.
- To ensure the relevance of the results to real-world scenarios, we adopted parameters in line with regulatory standards and industry practices. For instance, the UAV altitude range (50–120 m) and speed (5–15 m/s) align with urban air mobility guidelines, while the use of 3 GHz carrier frequency and rooftop-mounted gNodeBs (10–75 m height) mirrors common 5G infrastructure deployments. The use of orthogonal PRS with unique resource allocations for each cell replicates standard network configurations aimed at minimizing interference and enabling high-accuracy positioning.
- Three UAVs fly semi-randomized trajectories through a 3D urban environment. Each trajectory consists of straight-line segments, turning points, and vertical movements, simulating realistic missions such as aerial delivery or surveillance. UAV altitudes vary between 50 and 120 m, and horizontal speeds range from 5 to 15 m/s. These trajectories are designed to expose the UAVs to both LOS and NLOS conditions.
- To test generalization under diverse urban conditions, we define two distinct environments:
- –
- LOS-Dominant: Low building density (∼20 buildings/km2) representing open urban or suburban areas.
- –
- NLOS-Dominant: Dense urban layout (∼50 buildings/km2) mimicking signal blockages and multipath effects in city centers.
- Each UAV receives 5G PRS signals from six rooftop-mounted ground gNodeBs (gNBs). All gNBs operate at the same carrier frequency (3 GHz), with unique cell identities and non-overlapping PRS resource allocations. This ensures orthogonality across signals, enabling time-synchronized TOA measurement without inter-cell interference.
- PRS signals propagate through the 3D urban environment based on LOS/NLOS-dependent path loss models. UAVs record the received PRS waveforms at each time step and estimate the TOA via cross-correlation. The LOS/NLOS status for each UAV-gNB link is explicitly labeled. These TOA values are converted to time difference of arrival (TDOA) measurements, which are used for geometric position estimation via a spherical intersection algorithm.
- A Kalman filter smooths the TDOA-based position estimates, reducing random noise and improving temporal consistency. The filtered trajectories provide high-fidelity position estimates for each UAV.
- At each time step, for every UAV, the dataset records the following:
- –
- Estimated 3D position: .
- –
- True ground-truth position: .
- –
- Metadata: LOS/NLOS label, UAV ID, scenario ID, time index, visible gNBs.
The final dataset contains approximately 9000 labeled samples. These are used to train and evaluate supervised ML models for UAV localization.
3.2. Dataset Description
3.3. Robust Handling of Real-Time Noisy Data
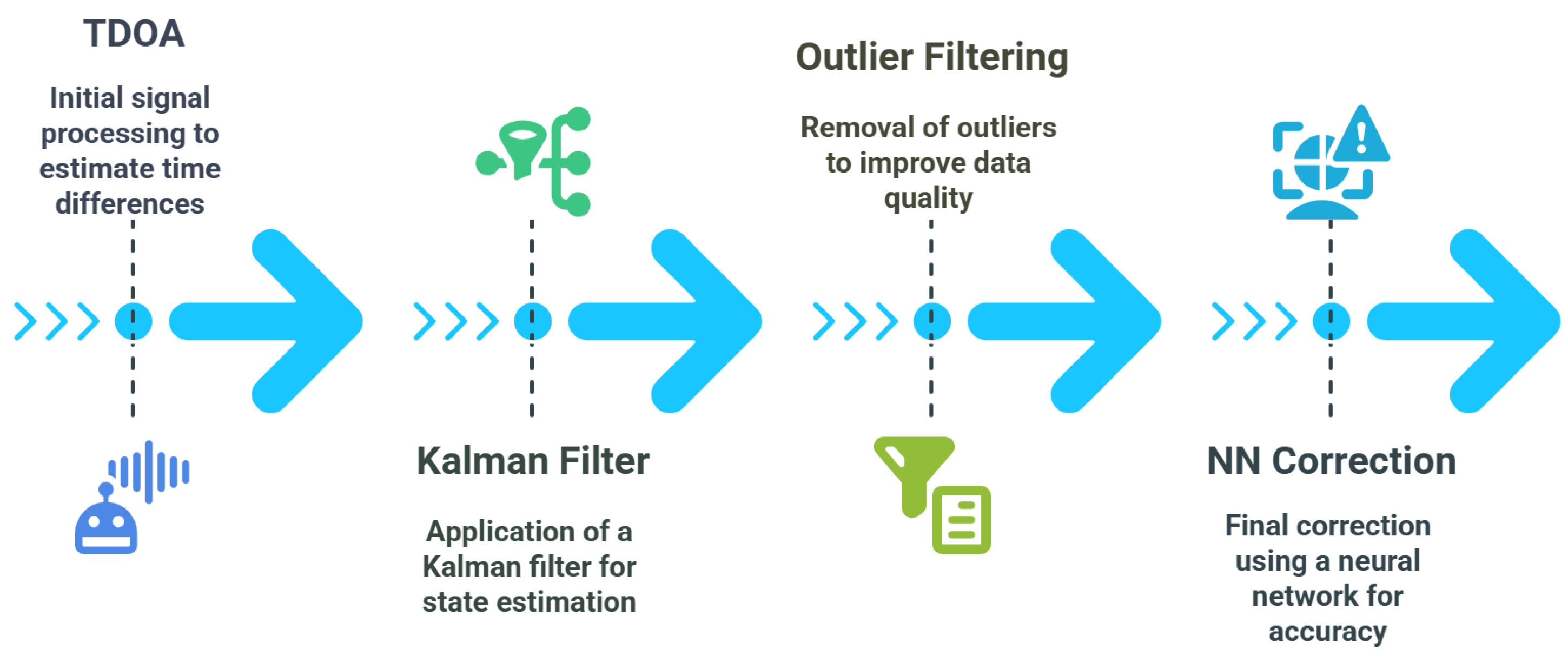
- Input: TDOA (Time Difference of Arrival)
- Function: TDOA measures the time difference at which a signal arrives at multiple receivers or sensors. This initial measurement helps estimate the position of a source (e.g., a UAV or mobile device) based on signal propagation delays.
- Purpose: Provides the raw location data used as the starting point for position estimation. However, these readings are often noisy and require further processing.
- Kalman Filter
- Function: A Kalman filter is an optimal recursive data processing algorithm. It estimates the state of a system from noisy measurements.
- Purpose: Smoothens the TDOA data by predicting and updating position estimates based on both measurement and motion models. It helps to reduce random noise but may still leave some irregular outliers.
- Outlier Filtering
- Function: This step involves detecting and removing abnormal or highly deviated data points that can distort the position estimation. Common techniques include statistical methods, median filters, or robust thresholding.
- Purpose: Enhances the robustness of the system by eliminating errors introduced by multipath propagation, interference, or sensor faults.
- NN Correction (Neural Network Correction)
- Function: A trained neural network model is applied to fine-tune the filtered data. The network learns from historical or labeled data and can capture non-linear patterns or biases that traditional filters might miss.
- Purpose: Provides a final, highly accurate position correction, making the system intelligent and adaptive to complex environments like NLOS conditions.
- To address the inherent noise in real-world 5G data, the proposed system integrates statistical outlier rejection (using ±3 limits), Kalman filtering, and neural network-based error correction. These layers dynamically adjust signal trust levels and discard unreliable data flagged as NLOS. First, we apply the statistical outlier rejection Algorithm 1, continuously monitoring incoming measurements and filtering outliers that deviate beyond a trusted range, ensuring that sudden interference-based glitches do not corrupt the position solution. Next, a KF combined with sensor fusion smooths out noise by optimally weighing the UAV motion model against incoming observations. If the 5G data is momentarily too noisy, the filter trusts the predicted state more. Additional onboard sensors, such as IMUs, provide short-term stability when signals degrade, preventing the position estimate from drifting. We also implement real-time NLOS mitigation in dense urban environments: the system uses a neural network to detect and correct NLOS-induced errors and can lower or discard measurements flagged as NLOS when enough of the other signals are available. A neural network further enables adaptive error correction, learning from recurring biases, e.g., systematic underestimates near certain buildings, and outputting a data-driven correction. Robust estimation techniques such as RANSAC allow us to exclude inconsistent base stations in the multilateration step, and the entire process is computationally light, avoiding the need for heavy batch computations or excessive smoothing that would introduce lag.
| Algorithm 1 Simplified UAV position estimation enhancement. |
|
3.4. Neural Network Architecture
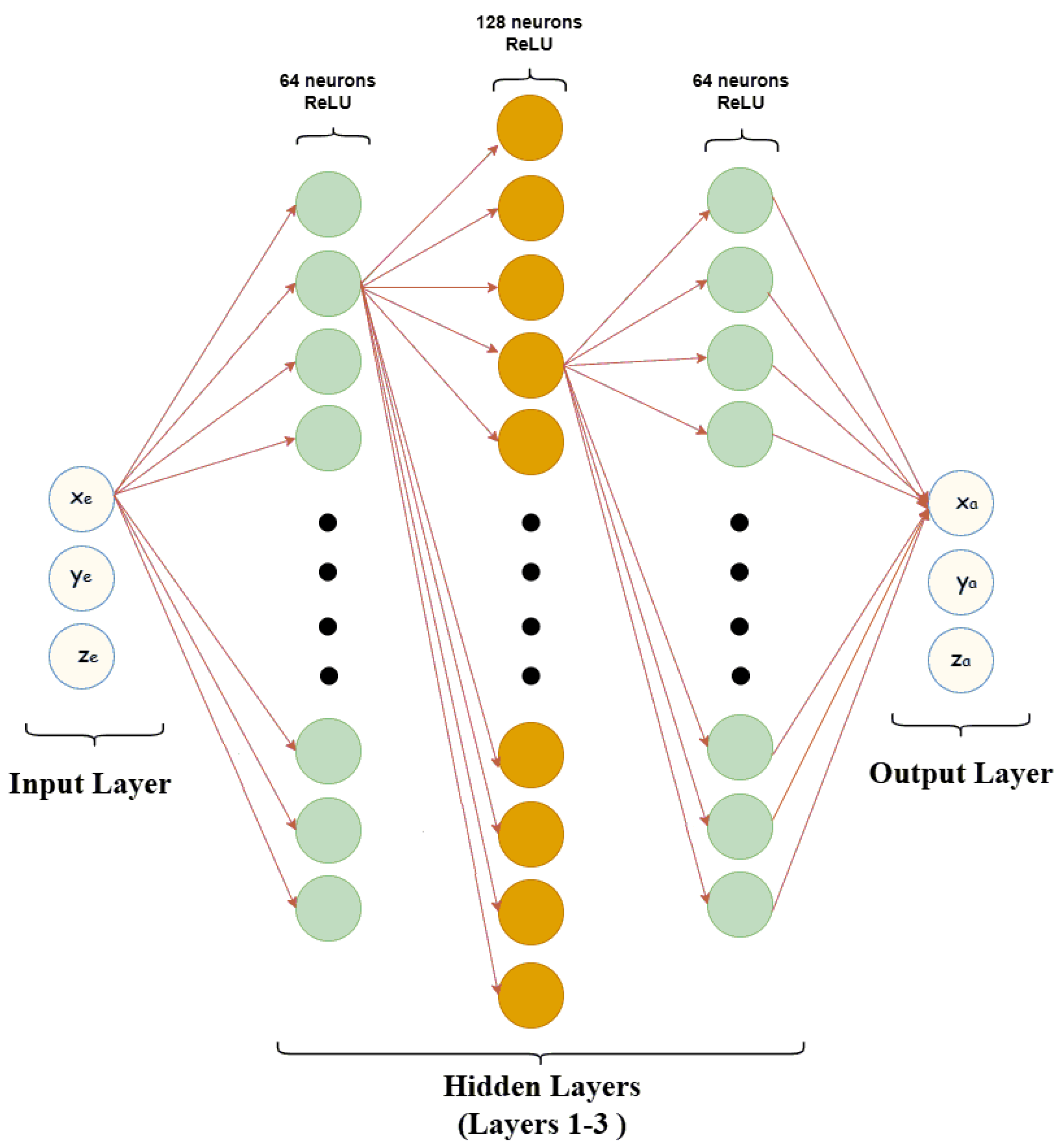
- Input Layer: Accepts three input features representing the estimated UAV coordinates. Layers: The network includes three intermediate layers:
- –
- First Hidden Layer: Expands the input to 64 neurons, applying the ReLU activation function.
- –
- Second Hidden Layer: Increases the complexity with 128 neurons, capturing deeper relationships.
- –
- Third Hidden Layer: Reduces the feature space to 64 neurons to refine the representation before prediction.
- Layer: Produces three output values representing the actual UAV coordinates. No activation function is applied to allow unrestricted predictions.
- Activation Function:
- The ReLU (Rectified Linear Unit) activation function introduces non-linearity in the hidden layers. It ensures the network can learn complex patterns by allowing positive values to pass through unchanged while setting negative values to zero which is defined in Equation (1):
- The structure (64–128–64 neurons) balances the learning capacity and computational efficiency. Expanding first helps capture detailed patterns, while reducing later prevents overfitting.
- This design also ensures feasibility for deployment on UAVs with limited compute and memory.
- ReLU helps the network learn complex relationships without suffering from vanishing gradients.
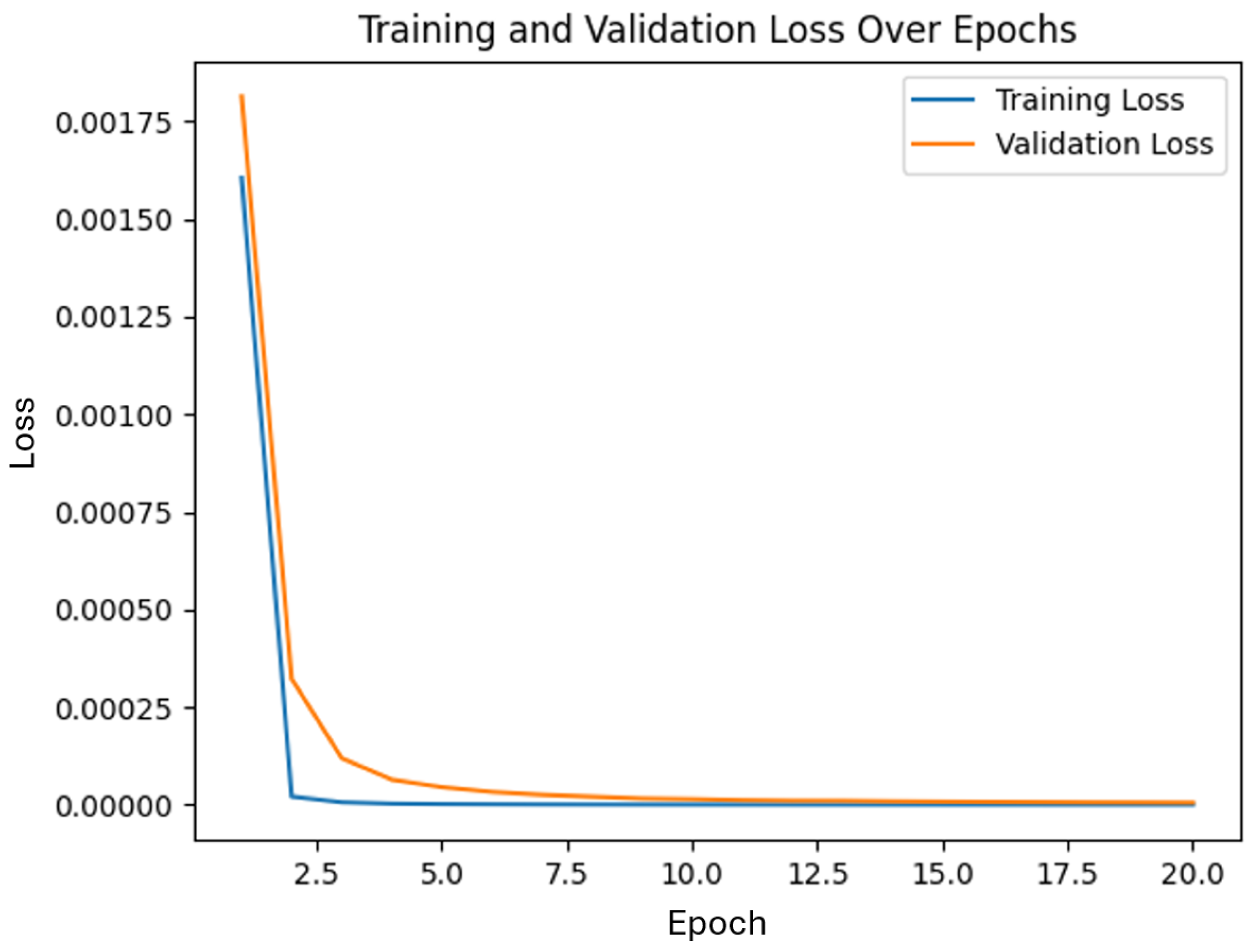
- Our three-layer neural network architecture proved to be the optimal configuration for our specific requirements. When we explored a five-layer architecture, the marginal improvements in accuracy were practically negligible, falling within our measurement uncertainty range, making the results essentially almost identical to the three-layer model. The three-layer architecture stood out because it perfectly balanced our key priorities: it delivered the accuracy that we needed without overcomplicating the model, maintained strong performance under various test conditions, and kept computational costs reasonable. The network was empirically optimized using validation loss. Starting from a single hidden layer, we incrementally increased the number of layers and neurons (from 16 to 128 per layer). Beyond three layers, validation loss plateaued and overfitting was observed as monitored by a rise in the validation error despite continued training accuracy improvements. Thus, the three-layer architecture with 64 neurons each was chosen for optimal generalization. The deeper architectures we tested did not justify the additional computational overhead, especially when the three-layer design effectively met our accuracy targets. The choice of three layers was not just about raw performance numbers—it represented the most pragmatic solution for our real-world constraints and objectives. It provided everything we needed: robust accuracy, efficient processing, and sustainable computational demands. Sometimes, simpler is better; in this case, the three-layer architecture proved precisely what we needed.
- Fully connected layers were chosen because the input features (5G PRS-derived coordinates) do not have spatial or sequential dependencies, making convolutional or recurrent networks unnecessary.
3.5. Training Procedure
- Forward Pass:Compute the predictions for the input batch.
- Loss Computation: Calculate the MSE loss.
- Backward Pass: Compute gradients via backpropagation.
- Parameter Update: Update model weights using the Adam Optimizer.
3.6. Model Evaluation, Testing, and Deployment
3.7. Implementation Details
4. Results and Discussion
4.1. Overview of Results
4.2. Training and Validation Loss Convergence
4.3. Quantitative Analysis of Position Estimation
4.4. LOS vs. NLOS Performance
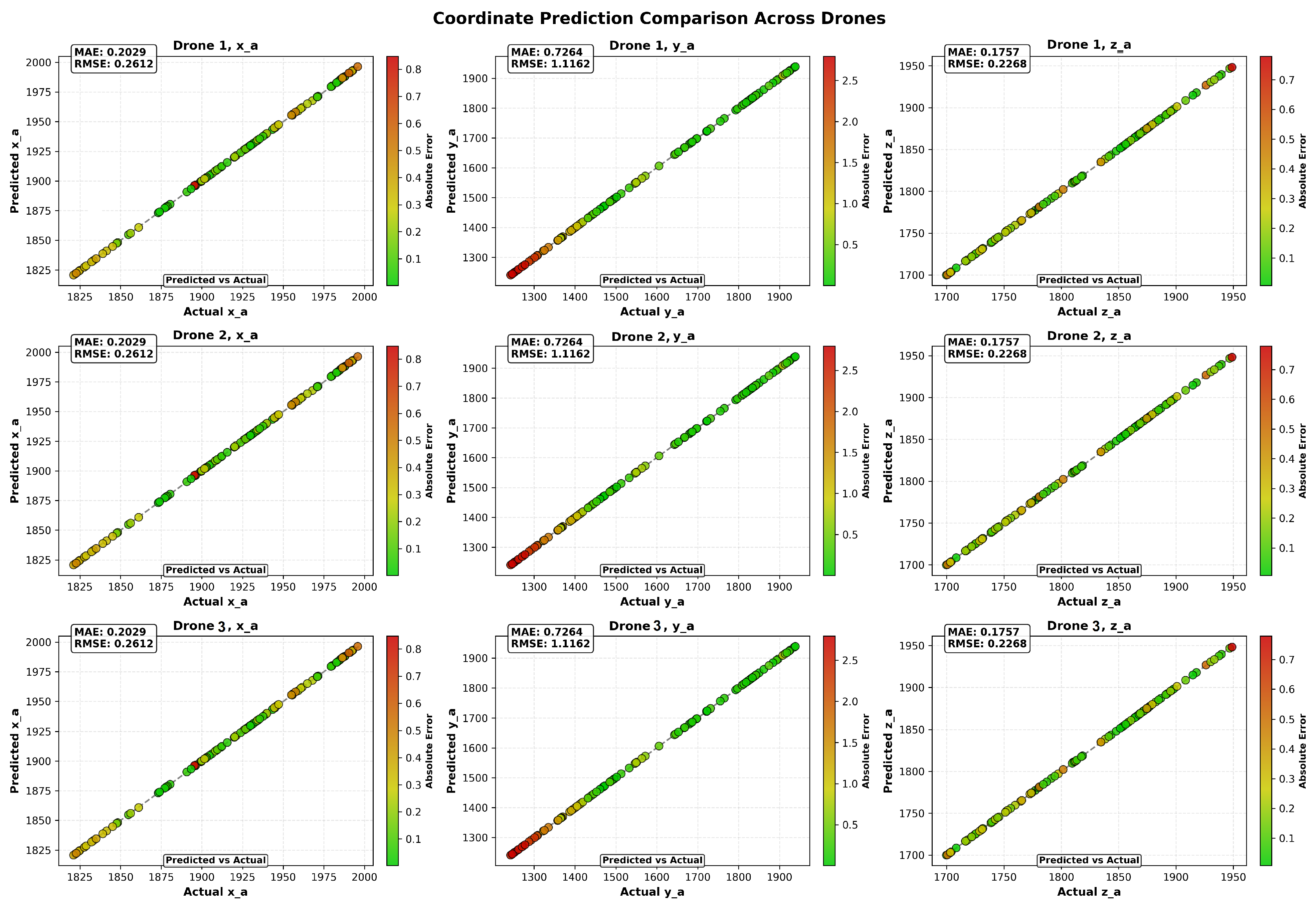
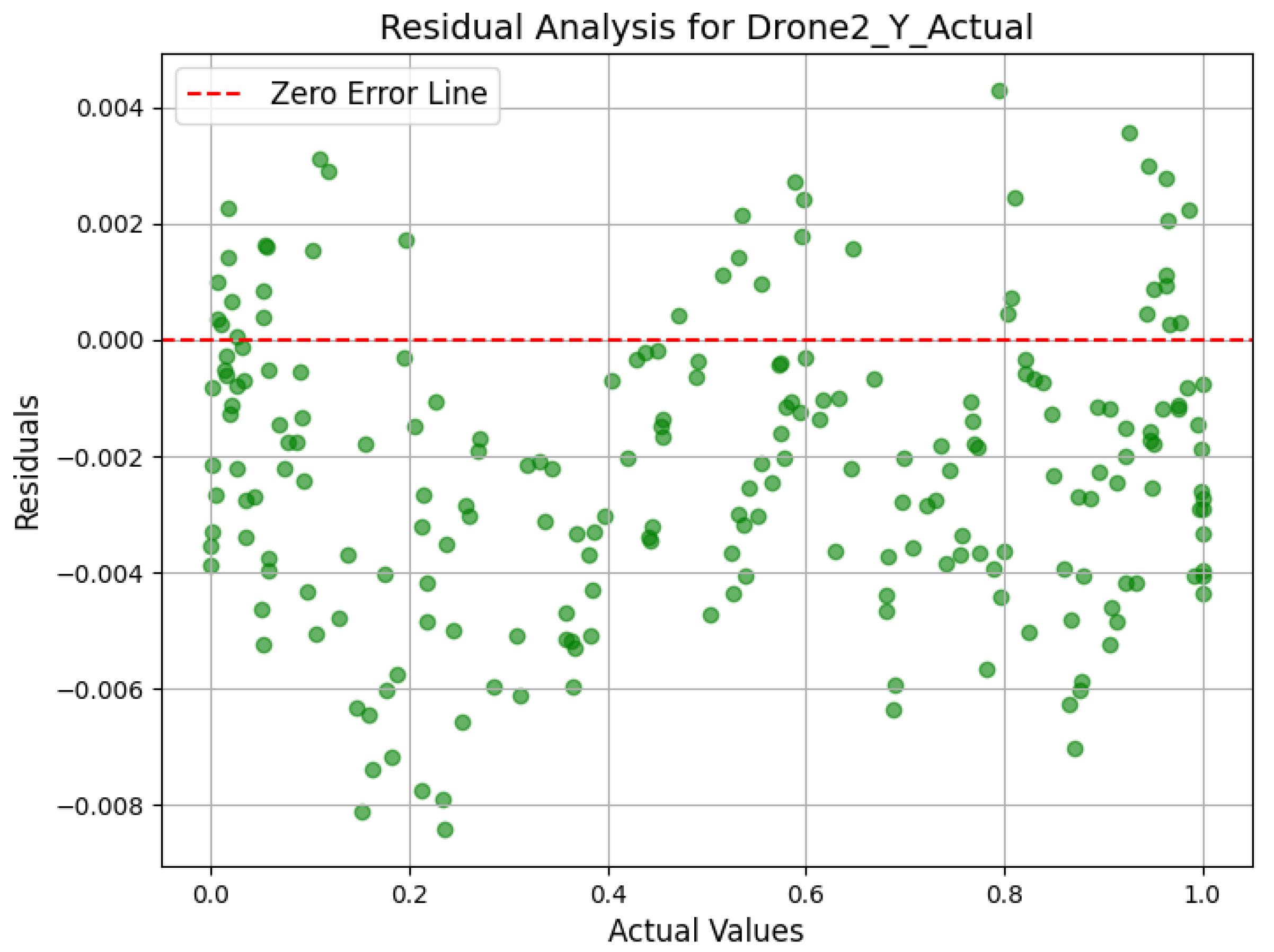
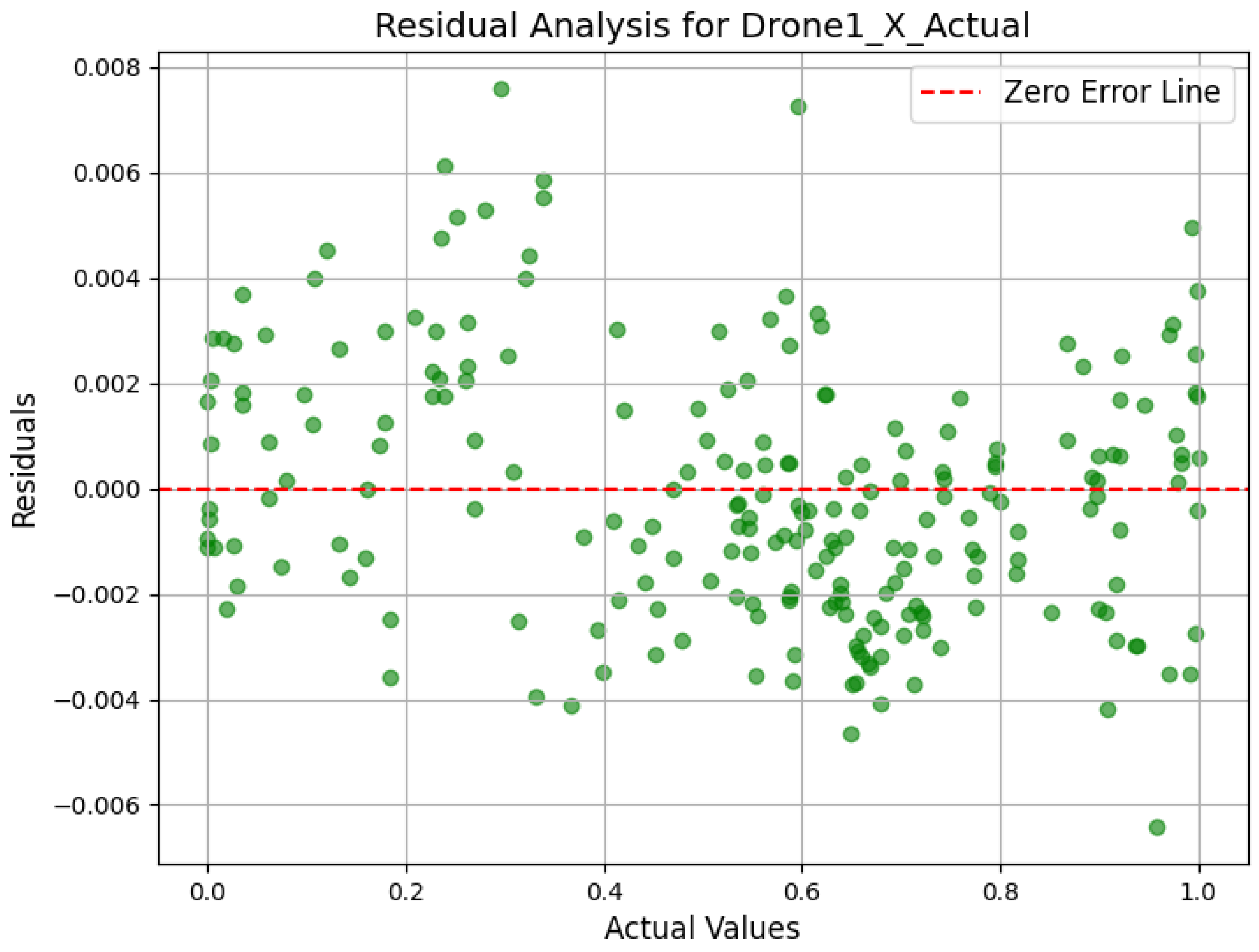
4.5. Scatter Plot and Residual Analysis
4.6. Spatial Error Distribution
4.7. Comparison of Raw vs. Corrected Position Estimates
5. Conclusions and Future Work
- A hybrid positioning framework that integrates 5G positioning reference signals (PRS) with a neural network-based correction module, specifically designed to address the challenges of UAV navigation in urban environments.
- A lightweight neural network architecture tailored for real-time deployment on resource-constrained UAV platforms, enabling accurate positioning without significant computational overhead.
- A realistic simulation environment that captures key urban signal propagation effects, including LOS/NLOS variability, multipath fading, and other critical impairments.
- Quantitative performance evaluation, showing mean absolute errors of 1.3 m under LOS and 1.7 m under NLOS conditions, with a RMSE of approximately 2.3 m representing a substantial improvement over traditional methods, especially in urban NLOS scenarios.
- A discussion of practical deployment challenges, such as regulatory restrictions on BVLOS operations, and second-order real-world effects like log-normal shadowing, inter-cell interference, synchronization issues, and Doppler spread.
- As shown in Table 5, our approach offers advantages in both accuracy and computational efficiency compared to conventional multilateration, neural network fingerprinting, hybrid GNSS/5G fusion, and graph-based optimization methods. The real-time capabilities and adaptability to NLOS environments support integration into intelligent airspace systems and autonomous navigation platforms. The system combines detailed signal modeling with practical design choices, aiming to improve both the algorithm and its real-world usability. The neural network correction module is built for embedded use, with a lightweight design that supports fast onboard processing and low latency. This allows for real-time position updates, even in dynamic urban environments with changing signal conditions.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Accuracy | Computational Efficiency | Remarks | Ref |
|---|---|---|---|---|
| Proposed 5G PRS + Neural Network Correction (5G TDOA + Kalman + FNN) | ∼1.3 m MAE (LOS), ∼1.7 m MAE (NLOS), ∼2.3 m RMSE. Significantly reduces baseline error. | High—Designed for urban NLOS; ML model compensates for multipath and removes outliers in real time. | Moderate—Real-time feasible. Lightweight FNN inference with Kalman filtering. Suitable for onboard UAV use. | Our approach |
| Baseline 5G TDOA + Kalman Filter (Conventional Multilateration) | 3.8 m (LOS), 5.1 m (NLOS) MAE. Performance degrades in dense urban areas. | Medium—Effective in LOS; poor in NLOS due to lack of multipath mitigation. | High—Very efficient. Suitable for real-time but lacks advanced error correction. | [38] |
| Neural Network Fingerprinting (Deep Learning + GNSS) | Few-meter-level accuracy in mapped urban areas. Performance declines with environmental changes. | High in mapped areas. Requires large training datasets; less adaptive to online changes. | Medium—Heavy offline training; fast inference. Needs storage for fingerprint database. | [39] |
| Hybrid GNSS/ 5G EKF Fusion (EKF + 5G + GNSS) | ∼1–3 m static urban, ∼1–4 m dynamic. Better than GNSS- or 5G-only. | High—Dual-system robustness. Effective fallback if one signal is degraded. | Medium—EKF is real-time friendly, but processing 5G + GNSS increases complexity. | [40] |
| Graph-Based 5G + IMU Fusion (Graph Optimization) | ∼0.15–0.3 m error in indoor LOS. Centimeter-level accuracy in ideal setups. | High—Robust in structured environments. Still being evaluated outdoors with multipath. | Moderate—Real-time capable but computationally heavier than EKF. | [41] |
- Implementing real-time inference pipelines optimized for embedded UAV systems with limited computational resources.
- Integrating multi-sensor data sources such as GNSS, IMUs, and LiDAR to enable more robust and resilient hybrid localization.
- Scaling the framework for fleet-level deployment, including support for distributed localization and coordination across UAV swarms.
- Improving simulation fidelity by incorporating Doppler spread, shadowing, synchronization errors, and other signal distortion effects.
- The proposed system is compatible with real-world 5G/UAV testbeds such as AERPAW and 5GRAIL, which provide access to live network signals, mobile UAV operations, and timing synchronization effects [47,48,49]. These platforms offer a foundation for end-to-end testing and hardware-in-the-loop validation under realistic conditions. This study demonstrates that accurate, real-time UAV localization in complex urban environments is achievable by integrating 5G positioning reference signals with lightweight neural network-based correction. The results highlight the potential for deployment in autonomous UAV fleets operating within next-generation urban airspace frameworks, supporting the advancement of urban air mobility and enabling new applications that demand precise positioning in challenging conditions.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moradi, N.; Chun, W.; Mafakheri, F. Urban Air Mobility for Last-Mile Transportation: A Review. Vehicles 2024, 6, 1383–1414. [Google Scholar] [CrossRef]
- Mousa, M.; Warrier, A.; Sen, M.; Whitworth, H.; Ali, A.; Al-Rubaye, S.; Tsourdos, A. Performing QoS measurements in UAV field trials with 5G-advanced communications at various altitudes. In Proceedings of the IET 6G and Future Networks Conference (IET 6G 2024), London, UK, 24–25 June 2024; Volume 2024, pp. 10–15. [Google Scholar]
- Jin, C.; Tay, W.P.; Zhao, K.; Ling, K.; Sin, K.K. A 5G/GNSS Integrated Positioning Method. In Proceedings of the Satellite Division’s International Technical Meeting, Denver, CO, USA, 19–23 September 2022. [Google Scholar] [CrossRef]
- Chaloupka, Z. Technology and standardization gaps for high accuracy positioning in 5G. IEEE Commun. Stand. Mag. 2017, 1, 59–65. [Google Scholar] [CrossRef]
- Vicenzo, S.; Xu, B.; Hsu, L.T. GNSS Direct Position Estimation-Inspired Positioning with Pseudorange Correlogram for Urban Navigation. GPS Solut. 2024, 28, 83. [Google Scholar] [CrossRef]
- Sun, R.; Fu, L.; Cheng, Q.; Chiang, K.W.; Chen, W. Resilient Pseudorange Error Prediction and Correction for GNSS Positioning in Urban Areas. IEEE Internet Things J. 2023, 10, 9979–9988. [Google Scholar] [CrossRef]
- Jin, W.; Kim, H.; Lee, H. A novel machine learning scheme for mmWave path loss modeling for 5G communications in dense urban scenarios. Electronics 2022, 11, 1809. [Google Scholar] [CrossRef]
- Bader, D.A. Fast Triangle Counting. In Proceedings of the 2023 IEEE High Performance Extreme Computing Conference (HPEC), Virtual, 19–23 September 2023; pp. 1–6. [Google Scholar]
- Fokin, G. Simulation Model of 5G NR Network Positioning Technology with Meter Accuracy. Part 1. PRS Signals Configuration. Proc. Telecommun. Univ. 2022, 8, 48–63. [Google Scholar] [CrossRef]
- Gonzalez-Garrido, A.; Querol, J.; Chatzinotas, S. 5G Positioning Reference Signal Configuration for Integrated Terrestrial/Non-Terrestrial Network Scenario. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; pp. 1136–1142. [Google Scholar]
- Mousa, M.; Al-Rubaye, S.; Inalhan, G. Unmanned Aerial Vehicle Positioning using 5G New Radio Technology in Urban Environment. In Proceedings of the 2023 IEEE/AIAA 42nd Digital Avionics Systems Conference (DASC), Barcelona, Spain, 1–5 October 2023; pp. 1–9. [Google Scholar]
- del Peral-Rosado, J.A.; Yildirim, A.; Schlötzer, S.; Nolle, P.; Razavi, S.M.; Parsawa, S.; Mundlamuri, R.; Kaltenberger, F.; Sirola, N.; Garlaschi, S.; et al. First field trial results of hybrid positioning with dedicated 5G terrestrial and UAV-based non-terrestrial networks. In Proceedings of the 36th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2023), Denver, CO, USA, 11–15 September 2023; pp. 1598–1605. [Google Scholar]
- Mohanty, A.; Gao, G. A Survey of Machine Learning Techniques for Improving Global Navigation Satellite Systems. Eurasip J. Adv. Signal Process. 2024, 2024, 73. [Google Scholar] [CrossRef]
- Gkonis, P.K. A survey on machine learning techniques for massive MIMO configurations: Application areas, performance limitations and future challenges. IEEE Access 2022, 11, 67–88. [Google Scholar] [CrossRef]
- Jin, C.; Tay, W.P.; Zhao, K.; Ling, K.V.; Lu, J.; Wang, Y. A Sub-meter Accurate Positioning using 5G Double-difference Carrier Phase Measurements. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; pp. 1176–1183. [Google Scholar]
- Jiao, H.; Tao, X.; Chen, L.; Ju, Z. GNSS/5G Joint Position Based on Weighted Robust Iterative Kalman Filter. Remote Sens. 2024, 6, 1009. [Google Scholar] [CrossRef]
- Li, J.; Liu, M.; Shang, S.; Gao, X.; Liu, J. Carrier phase positioning using 5G NR signals based on OFDM system. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK, 26–29 September 2022; pp. 1–5. [Google Scholar]
- Bader, Q.; Saleh, S.; Elhabiby, M.; Noureldin, A. NLoS detection for enhanced 5G mmWave-based positioning for vehicular iot applications. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 5643–5648. [Google Scholar]
- Huang, S.; Chen, H.M.; Wang, B.; Chai, J.; Wu, X.; Li, F. Positioning performance evaluation for 5G positioning reference signal. In Proceedings of the 2022 2nd International Conference on Frontiers of Electronics, Information and Computation Technologies (ICFEICT), Wuhan, China, 19–21 August 2022; pp. 497–504. [Google Scholar]
- Wang, Y.; Dong, C.; Shi, L. Research on 5G Signal Positioning Technology of Amur Tiger Locator for Big Data Platform. In Proceedings of the 2021 IEEE 2nd International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 17–19 December 2021; Volume 2, pp. 532–535. [Google Scholar]
- López-Pérez, D.; De Domenico, A.; Piovesan, N.; Xinli, G.; Bao, H.; Qitao, S.; Debbah, M. A survey on 5G radio access network energy efficiency: Massive MIMO, lean carrier design, sleep modes, and machine learning. IEEE Commun. Surv. Tutor. 2022, 24, 653–697. [Google Scholar] [CrossRef]
- Malmström, M.; Skog, I.; Modarres Razavi, S.; Zhao, Y.; Gunnarsson, F. 5G Positioning: A Machine Learning Approach. In Proceedings of the 2019 16th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 23–24 October 2019; pp. 1–6. [Google Scholar]
- Liu, Z.; Chen, L.; Zhou, X.; Jiao, Z.; Guo, G.; Chen, R. Machine Learning for Time-of-Arrival Estimation with 5G Signals in Indoor Positioning. IEEE Internet Things J. 2023, 10, 9782–9794. [Google Scholar] [CrossRef]
- Gante, J.; Falcão, G.; Sousa, L. Deep Learning Architectures for Accurate Millimeter Wave Positioning in 5G. Neural Process. Lett. 2020, 51, 487–514. [Google Scholar] [CrossRef]
- Butt, M.M.; Rao, A.; Yoon, D. RF Fingerprinting and Deep Learning Assisted UE Positioning in 5G. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Republic of Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Duong, P.B.; Ghimire, B.; Dietmayer, K.; Ali, S.U.; Kim, H.A.; Seitz, J. Supervised Machine Learning Assisted Hybrid Positioning Based on GNSS and 5G. In Proceedings of the 2022 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–8 September 2022; pp. 1–10. [Google Scholar]
- Mandala, A.K.; Seob, J.B.; De, S.; Poddar, A.K.; Rohde, U. A Novel Statistically-Aided Learning Framework for Precise Localization of UAVs. In Proceedings of the 2023 97th IEEE Vehicular Technology Conference: VTC2023-Spring, Florence, Italy, 20–23 June 2023; pp. 1–5. [Google Scholar]
- Ullah, I.; Adhikari, D.; Khan, H.; Ahmad, S.; Esposito, C.; Choi, C. Optimizing Mobile Robot Localization: Drones-Enhanced Sensor Fusion with Innovative Wireless Communication. In Proceedings of the IEEE INFOCOM WKSHPS: DroneCom 2024, Vancouver, BC, Canada, 20–23 May 2024; pp. 1–8. [Google Scholar]
- Hashemi, S.M.; Botez, R.M.; Ghazi, G. Bidirectional long short-term memory development for aircraft trajectory prediction applications to the UAS-S4 Ehécatl. Aerospace 2024, 11, 625. [Google Scholar] [CrossRef]
- Guo, J.; Zhou, Y.; Zhao, S. A New GNSS Outlier Mitigation Method for GNSS/INS Integrated System. Meas. Sci. Technol. 2023, 34, 105118. [Google Scholar] [CrossRef]
- Mogyorósi, F.; Revisnyei, P.; Pašić, A.; Papp, Z.; Törös, I.; Varga, P. Positioning in 5G and 6G Networks—A Survey. Sensors 2022, 22, 4757. [Google Scholar] [CrossRef]
- Lazzari, F.; Buffi, A.; Nepa, P.; Lazzari, S. Numerical investigation of an UWB localization technique for unmanned aerial vehicles in outdoor scenarios. IEEE Sens. J. 2017, 17, 2896–2903. [Google Scholar] [CrossRef]
- Weber, M.P.; Mishra, C.; Holzapfel, F. Analysis and Testing of Data Link Time of Flight measurements in Data Fusion Algorithms for Positioning of UAV. In Proceedings of the AIAA SCITECH 2024 Forum, Orlando, FL, USA, 8–12 January 2024; p. 2796. [Google Scholar]
- Sorbelli, F.B.; Pinotti, C.M.; Silvestri, S.; Das, S.K. Measurement errors in range-based localization algorithms for UAVs: Analysis and experimentation. IEEE Trans. Mob. Comput. 2020, 21, 1291–1304. [Google Scholar] [CrossRef]
- Lehmann, R. 3 σ-rule for outlier detection from the viewpoint of geodetic adjustment. J. Surv. Eng. 2013, 139, 157–165. [Google Scholar] [CrossRef]
- Diederik, P.K. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Zhang, Y.; Chen, C.; Shi, N.; Sun, R.; Luo, Z.Q. Adam can converge without any modification on update rules. Adv. Neural Inf. Process. Syst. 2022, 35, 28386–28399. [Google Scholar]
- Li, X.; Xing, Y.; Zhang, Z. A Hybrid AOA and TDOA-Based Localization Method Using Only Two Stations. Int. J. Antennas Propag. 2021, 2021, 5512395. [Google Scholar] [CrossRef]
- Yin, L.; Ni, Q.; Deng, Z. A GNSS/5G integrated positioning methodology in D2D communication networks. IEEE J. Sel. Areas Commun. 2018, 36, 351–362. [Google Scholar] [CrossRef]
- Inside GNSS. ESA-Funded Project Advances Hybrid GNSS/5G Positioning Technology. 2024. Available online: https://insidegnss.com/esa-funded-project-advances-hybrid-gnss-5g-positioning-technology/ (accessed on 18 March 2025).
- Kabiri, M.; Cimarelli, C.; Bavle, H.; Sanchez-Lopez, J.L.; Voos, H. Graph-Based vs. Error State Kalman Filter-Based Fusion of 5G and Inertial Data for MAV Indoor Pose Estimation. J. Intell. Robot. Syst. 2024, 110, 87. [Google Scholar] [CrossRef]
- Singh, S.; Sharma, K.; Karna, B.K.; Raj, P. Pruning and quantization for deeper artificial intelligence (AI) model optimization. In Intelligent Control, Robotics, and Industrial Automation, Proceedings of the International Conference, RCAAI 2022, Manipal, India, 24–26 November 2022; Springer: Singapore, 2022; pp. 933–945. [Google Scholar]
- Oraibi, W.; Hussain, A.S.T.; Malek, F.; Abbas, A.K. UAV storage devices circuitry integration with electrical power generation system. Int. J. Res. Eng. Appl. Sci. 2015, 5, 28–34. [Google Scholar]
- Harpe, P.; Shen, Y.; Li, H.; Pelzers, K.; Xin, H.; Cantatore, E. Ultra Low Power Event-Driven Sensor Interfaces. In Proceedings of the 2023 9th International Workshop on Advances in Sensors and Interfaces (IWASI), Bari, Italy, 8–9 June 2023; pp. 133–137. [Google Scholar]
- Choi, B.; Yeon, J.; Min, J.U.; Lee, K. Particulate matter (PM10 and PM2. 5) and greenhouse gas emissions of UAV delivery systems on metropolitan subway tracks. Sustainability 2022, 14, 8630. [Google Scholar] [CrossRef]
- Jover, J.; Bermúdez, A.; Casado, R. A tactical conflict resolution proposal for U-Space Zu airspace volumes. Sensors 2021, 21, 5649. [Google Scholar] [CrossRef]
- Marojevic, V.; Guvenc, I.; Sichitiu, M.; Dutta, R. An experimental research platform architecture for UAS communications and networking. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar]
- Moore, J.; Abdalla, A.S.; Ueltschey, C.; Gürses, A.; Özdemir, Ö.; Sichitiu, M.L.; Güvenç, I.; Marojevic, V. Advancing Experimental Platforms for UAV Communications: Insights from AERPAW’S Digital Twin. In Proceedings of the 2024 IEEE 100th Vehicular Technology Conference (VTC2024-Fall), Washington DC, USA, 7–10 October 2024; pp. 1–5. [Google Scholar]
- Kudyba, P.; Mandapaka, J.S.; Wang, W.; McCorkendale, L.; McCorkendale, Z.; Kidane, M.; Sun, H.; Adams, E.; Namuduri, K.; Fund, F.; et al. A UAV-assisted wireless localization challenge on AERPAW. arXiv 2024, arXiv:2407.12180. [Google Scholar]


| Parameter | Value/Range |
|---|---|
| Urban channel model | 3GPP TR 38.901 UMa |
| Carrier frequency | 3 GHz |
| Number of UAVs | 3 |
| UAV altitude range | 50–120 m |
| UAV speed range | 5–15 m/s |
| Number of gNodeBs | 6 |
| gNB placement | Rooftop (height: 10–75 m) |
| Building density | 20/50 buildings/km2 |
| PRS configuration | Orthogonal, unique per gNB/UAV |
| LOS/NLOS labeling | Explicit per link |
| TOA estimation method | Cross-correlation with PRS |
| Positioning method | TDOA + Kalman filter |
| Dataset output | and per timestep |
| Metric | Value |
|---|---|
| MSE | 0.000012 |
| MAE | 2.63 m |
| RMSE | 3.12 m |
| R-Squared () | 0.666549 |
| Condition | MAE (m) | RMSE (m) | MSE (m2) |
|---|---|---|---|
| LOS | 1.30 | 1.60 | 2.56 |
| NLOS | 1.70 | 2.05 | 4.20 |
| Condition | MAE (Raw) | MAE (Corrected) | RMSE (Raw) | RMSE (Corrected) |
|---|---|---|---|---|
| LOS | 3.8 m | 1.3 m | 4.7 m | 1.6 m |
| NLOS | 5.1 m | 1.7 m | 6.3 m | 2.05 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mousa, M.; Al-Rubaye, S. Intelligent 5G-Aided UAV Positioning in High-Density Environments Using Neural Networks for NLOS Mitigation. Aerospace 2025, 12, 543. https://doi.org/10.3390/aerospace12060543
Mousa M, Al-Rubaye S. Intelligent 5G-Aided UAV Positioning in High-Density Environments Using Neural Networks for NLOS Mitigation. Aerospace. 2025; 12(6):543. https://doi.org/10.3390/aerospace12060543
Chicago/Turabian StyleMousa, Morad, and Saba Al-Rubaye. 2025. "Intelligent 5G-Aided UAV Positioning in High-Density Environments Using Neural Networks for NLOS Mitigation" Aerospace 12, no. 6: 543. https://doi.org/10.3390/aerospace12060543
APA StyleMousa, M., & Al-Rubaye, S. (2025). Intelligent 5G-Aided UAV Positioning in High-Density Environments Using Neural Networks for NLOS Mitigation. Aerospace, 12(6), 543. https://doi.org/10.3390/aerospace12060543