4.1. CTMC-Based Threshold Iteration Algorithm
As shown in
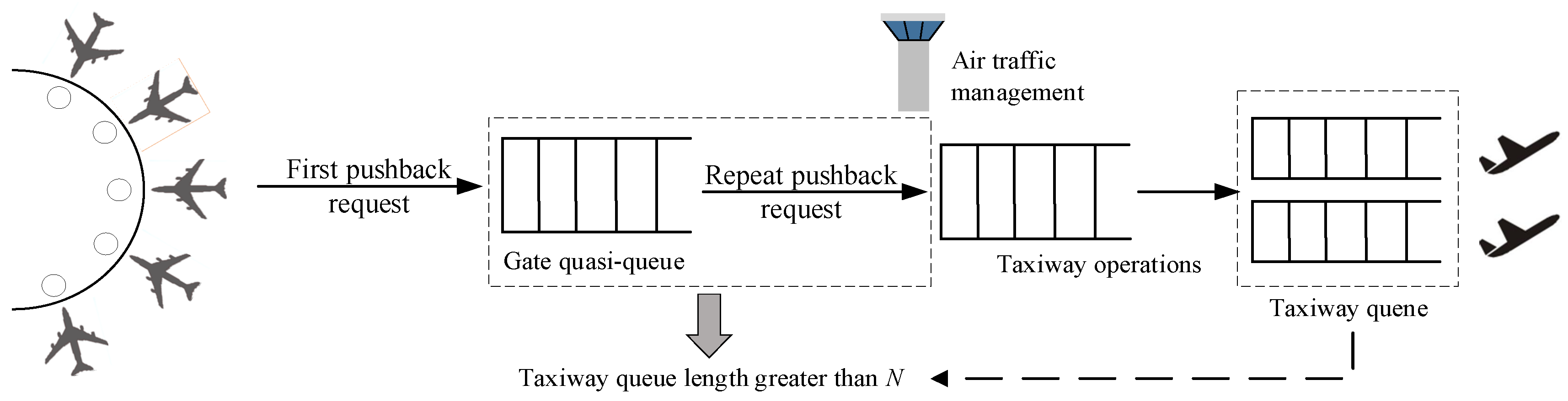
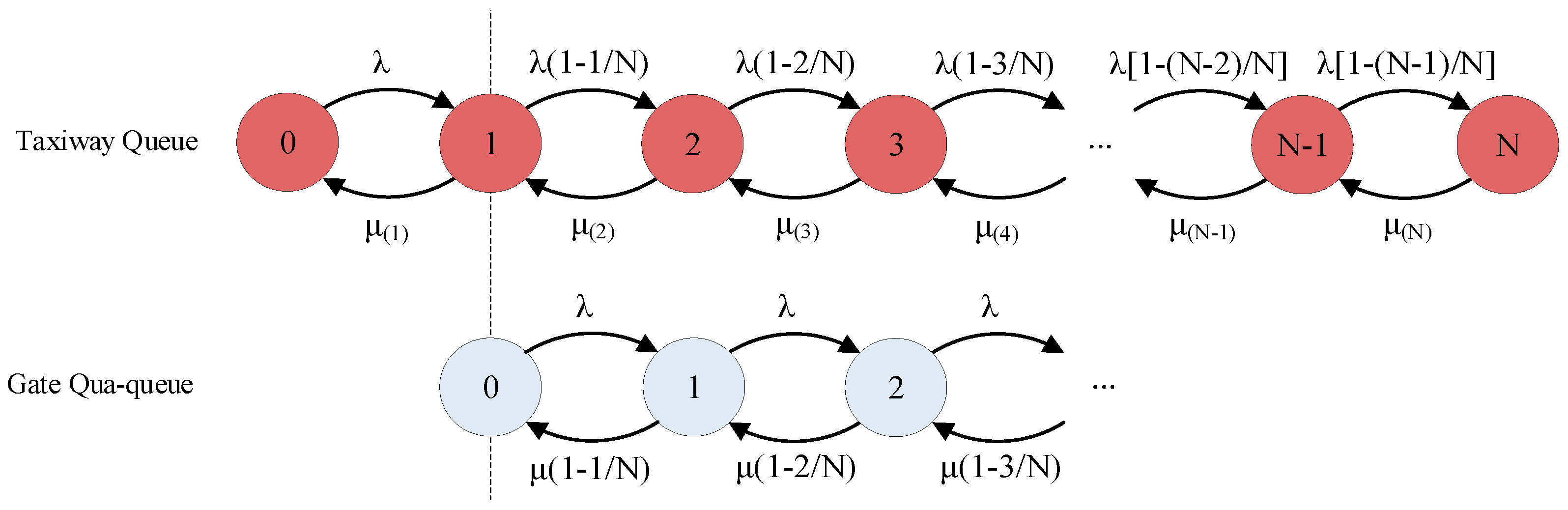
Figure 2, the multi-runway linear pushback rate control strategy proposed in this paper exhibited a strict Markov property, meaning that pushback permissions are determined by the length of the departure taxiway waiting queue. Moreover, the incorporation of pushback rate control implies that the optimization process for flights should be global, rather than localized to individual flights on the taxiway.
At the gate, flight arrivals follow a Poisson distribution, with an input probability of 1 since the airport cannot reject flight schedules. Consequently, the output rate matches the input rate of the taxiway. For the taxiway, flights enter the overall waiting queue with a probability (1 − n/N), or may be held at the gate with a probability [1 − (1 − n/N)], resulting in gate holding. The service rate μ(n) is based on the minimum safe distance between consecutive flights. In this study, the wake turbulence separation is adopted as the standard, ensuring that the service rate complies with requirement under multi-runway conditions.
For any given queueing state, we assume that:
where
πn denotes the queue transfer probability, which is not detailed in this paper. In the case of a single runway, typically only the waiting situation at the independent runway gate needs to be considered.
Assuming dual-runway conditions, the service rate should be:
Building on these characteristics, this paper presents an enhanced threshold iterative optimization algorithm that leverages a CTMC framework. The algorithm systematically searches for the lowest cost across various taxiway queue length thresholds through an iterative process. In stage I, the goal is to determine the optimal taxiway queue threshold N using a fixed service rate. In stage II, the CTMC framework is improved by interactively embedding heuristic algorithms based on fixed queue thresholds and variable service rates. This section emphasizes the application of the first stage, focusing on defining taxiway queue thresholds to ensure broad applicability. To demonstrate the effectiveness of the pushback control strategy, the differences in wake turbulence separation across aircraft types were averaged based on the aircraft type proportions in the example data. The fixed service rate for airports with
r runways for stage I at this point should be:
The pseudo-code is provided in Algorithm A1, and the main steps are as follows:
Step 1: Parameter initialization. Flights are ordered by pushback request times based on the FCFS principle, ensuring that they are processed in chronological order. Key parameters, including the initial queue length for the iterative algorithm, the average wake turbulence separation μave, and taxiway capacity, are also initialized.
Step 2: Taxiway capacity loop. The outer loop for taxiway capacity begins with the capacity determined by the airport’s configuration. The goal of this loop is to continuously update and simulate different taxiway queue length thresholds to find the optimal taxiing conditions, as long as the taxiway capacity does not exceed the configuration limit.
Step 3: Flight sequence loop. For each flight waiting for pushback, the system evaluates the current taxiway queue length n. When the queue length is less than N, the system uses the DPC method to control flight(i). The service rate is set to calculate the taxiway’s queue state at each moment. If the allowable pushback interval is greater than or equal to μ(n) and meets the input requirements, flight(i + 1) is permitted to join the taxiway waiting queue. The interaction between the taxiway capacity and pushback operations is assessed through simulation. If the calculated Gi value exceeds Gmax during the evaluation, the inner loop is terminated, and the system proceeds to the outer loop, marking the N value as infeasible.
Step 4: Cost metric calculation. The simulation calculates cost metrics, such as pushback waiting time and taxiway usage, for each pushback request, denoted as CTj. The cumulative cost across the entire threshold N, represented as CTN, forms the basis for selecting the optimal taxiway queue threshold in subsequent steps.
Step 5: Optimization and identification of optimal values. Upon the completion of all outer and inner loops, the calculated CTN values are compared with the determined optimal taxiway queue length W along with its corresponding taxiway waiting time G and associated parameters. The goal was to identify the queue length threshold that minimized the total system cost across multiple simulations.
4.2. CTMC-Enhanced Whale Optimization Algorithm
In the context of scheduling departing flights at multi-runway airports, the design of optimization algorithms is of great significance in improving the operational efficiency of airports, reducing flight delays, and lowering the operational costs. Unlike traditional static scheduling approaches, the two-stage scheduling proposed in this paper is a coordinated optimization problem characterized by dynamicity and complexity, requiring real-time adjustments to adapt to constantly changing airport ground conditions. Thus, the algorithm needs to be highly adaptable with strong global search capabilities.
The whale optimization algorithm (WOA) is a swarm intelligence optimization technique inspired by the hunting behavior of humpback whales [
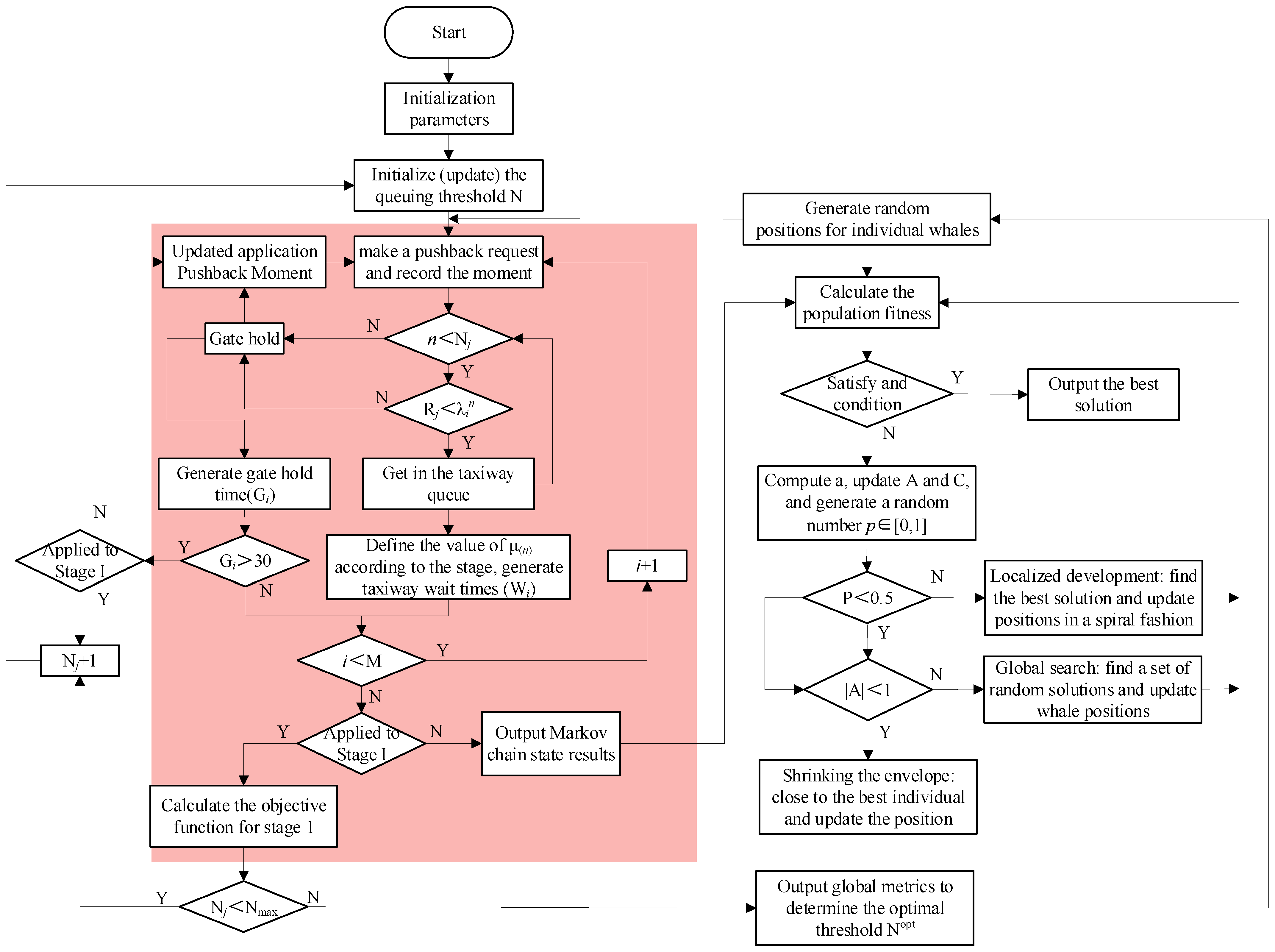
29]. It utilizes strategies like encircling prey and spiral updating to explore multiple regions of the solution space, effectively preventing premature convergence and enhancing flexibility and robustness in complex airport environments. Building on this, we proposed integrating the improved CTMC-based algorithm within the WOA, allowing the algorithm to adjust flights in real-time based on current taxiway queue lengths. Specifically, CTMC interactions are embedded within each individual to assess fitness, and under this condition, the optimal solutions for flight sequencing and runway assignment are determined during the scheduling period, thereby adapting to changes in the airport ground conditions. The interaction framework and algorithm flow are illustrated in
Figure 3.
The pseudo-code is provided in Algorithm A2, and the main steps are as follows:
Step 1: Population initialization. A population of size K is initialized as X = {X1, X2, X3,⋯XK}, consisting of multiple individuals, each representing a flight scheduling solution that includes flight sequencing and runway assignment, like Xi = {(f1, r1), (f2, r2),⋯, (fn, rn)}. Each solution, known as a position vector, represents a point in the algorithm’s search space. The initial flight order for all scheduling solutions follows the FCFS rule.
Step 2: Fitness calculation (interaction phase). The overall fitness is calculated from the updated flight states, ensuring that each flight’s status accurately reflects the latest ground conditions. During each fitness evaluation
Xi, the CTMC algorithm is run within the scheduling solution to adjust and update the position of each whale individual. This process involves implementing a linear dynamic pushback control strategy within the flight sequence and runway assignment of each individual, enabling state transitions in the Markov chain based on the wake turbulence separation between consecutive flights. The CTMC algorithm further optimizes the individual’s state, with the output rate of the taxiway waiting queue governed by Equation (21). The specific steps are detailed in steps 3 and 4 in the previous section. To account for the interdependence and correlation between the two objectives, the optimization process was made comparable and effective by normalizing both objectives. This approach aimed to reflect the maximum potential values of different objectives, allowing for a comparison on the same scale. Therefore, the objective was set as the minimum total sum of the normalized delay levels and costs.
Here, the value of Z ranges from [0, 2], assuming equal importance and weight for the delay levels and departure costs in this study. These weights can be adjusted based on the specific needs of the airport. This setup allows the whale optimization algorithm to not only optimize the scheduling solution, but also adapt dynamically to changes in the airport ground conditions.
Step 3: Iterative update of whale position (exploitation phase). Each individual searches its neighborhood, targeting the global optimum, and updates all positions in the population relative to this global best. By setting |A| < 1, the algorithm favors intensive searches around the current optimal solution. The hunting strategy employed by the whales is determined by a random number
p ∈ [0, 1]: if
p < 0.5, the encircling prey behavior is chosen, where individuals gradually move closer to the target by adjusting their distance to the optimum; otherwise, the spiral bubble-net attack is selected, with whales approaching the optimum along a spiral path. To emulate both behaviors, it is assumed that the likelihood of whales updating their position via contraction and spiral paths is 0.5 each. The whale’s next position is determined by Equation (24).
Here,
and
represent the candidate solution and the current local optimal solution in iteration
t, respectively.
B is a constant and
l is a random number with the value between −1 and 1.
and
are the coefficient vectors:
is used to control the extent to which the searching whale moves toward or away from the selected target. It simulates the behavior of a whale circling its prey by controlling the exploration and exploitation balance of the solution; the coefficient
is used to determine the path and direction of the whale around the prey, and the algorithm is made to introduce randomness in the updating of the solution’s location and enhance the algorithm’s global search capability by setting
to twice its random value. This is formulated as:
where
,
is a random number in [0, 1],
a represents a linearly decreasing value from 2 to 0 based on the ratio of iteration
t to the maximum number of iterations
tmax. This serves as the distance between the
i-th individual and the current global optimal solution in iteration
t, as shown below:
Step 4: Random search position (exploration phase). To seek to explore more of the search space, when |A| ≥ 1|, whale individuals perform random searches away from the current optimal solution, forcing candidate solutions to move toward randomly chosen positions. It is assumed that these random solutions are either optimal or near-optimal, prompting a global search.
The distance value at this stage is defined as:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}