
Research on Optimization Technology of Minimum Specific Fuel Consumption for Triple-Bypass Variable Cycle Engine


Abstract
:1. Introduction
2. Research Process
2.1. Overall Structure of Engine
2.2. Establishment of Composite Models
2.2.1. Establishment of the Kriging Model
2.2.2. Propulsion System Matrix Module
2.3. Composite Model Accuracy Verification
2.4. PSC of Minimum Specific Fuel Consumption
2.5. MPC-Based Transition State Optimization
3. Results
3.1. Composite Model’s Dynamic Accuracy
3.2. Optimization Results Based on PSM
3.3. MPC Controller Control Effect
4. Discussion
5. Conclusions
- In this paper, a new composite model modeling method is proposed, which uses the Kriging model to fit the strong nonlinear characteristics of the engine at the ground, sub-patrol, and over-patrol working points, expanding the PSM at the steady-state point to improve the real-time performance of the model.
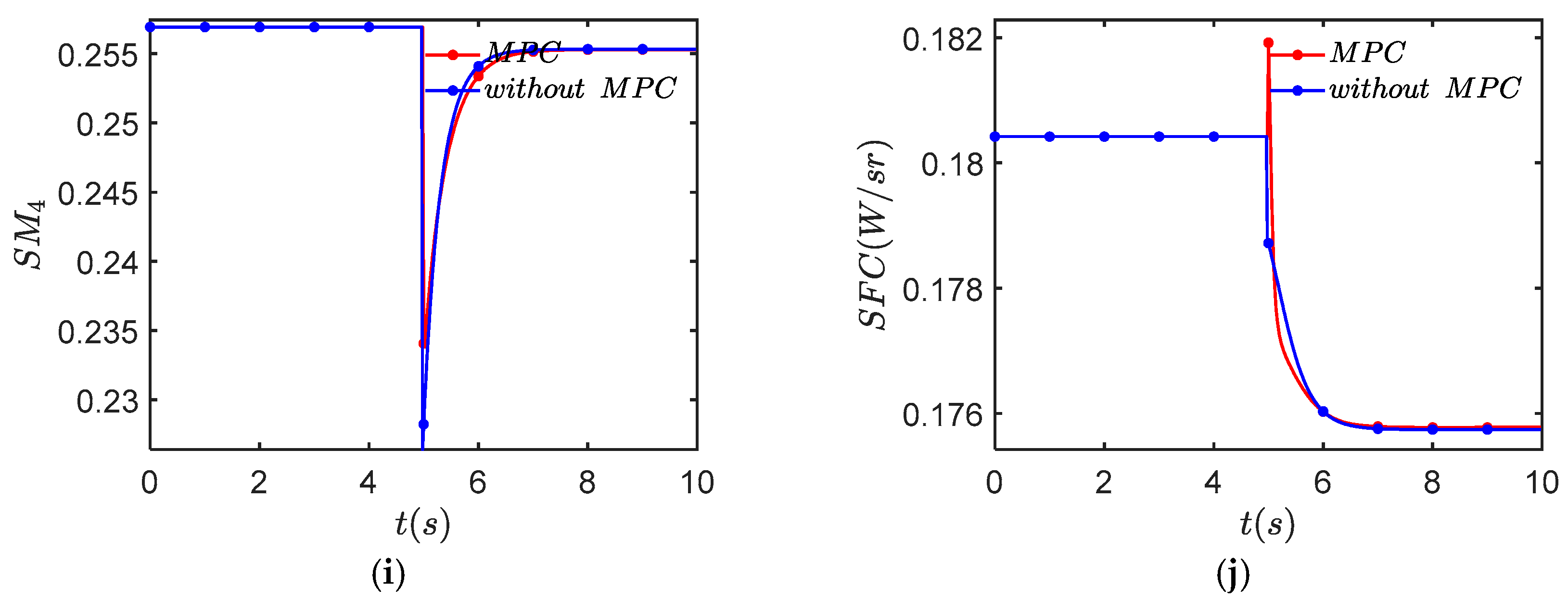
- Based on the linear optimization algorithm, the performance optimization problem of the engine is studied, and the optimization effect is studied by taking the over-cruise state as an example, and the results show that the fuel consumption rate in this state is significantly reduced
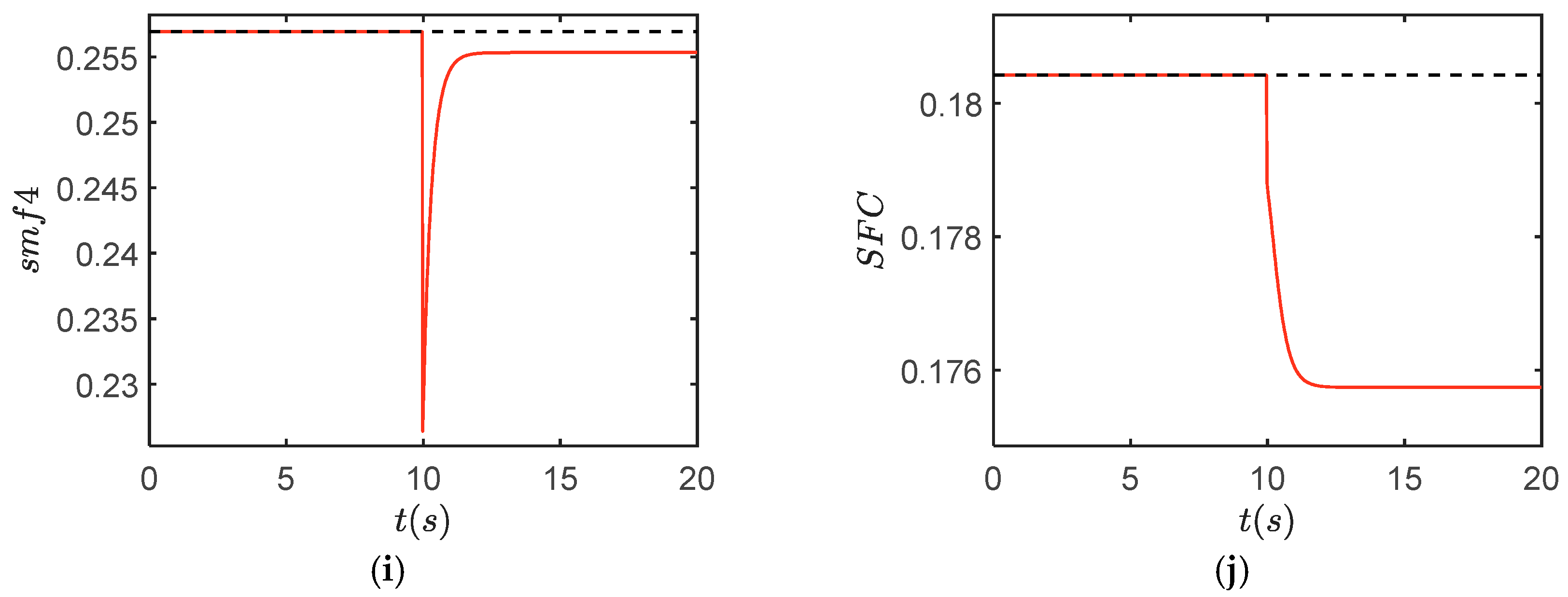
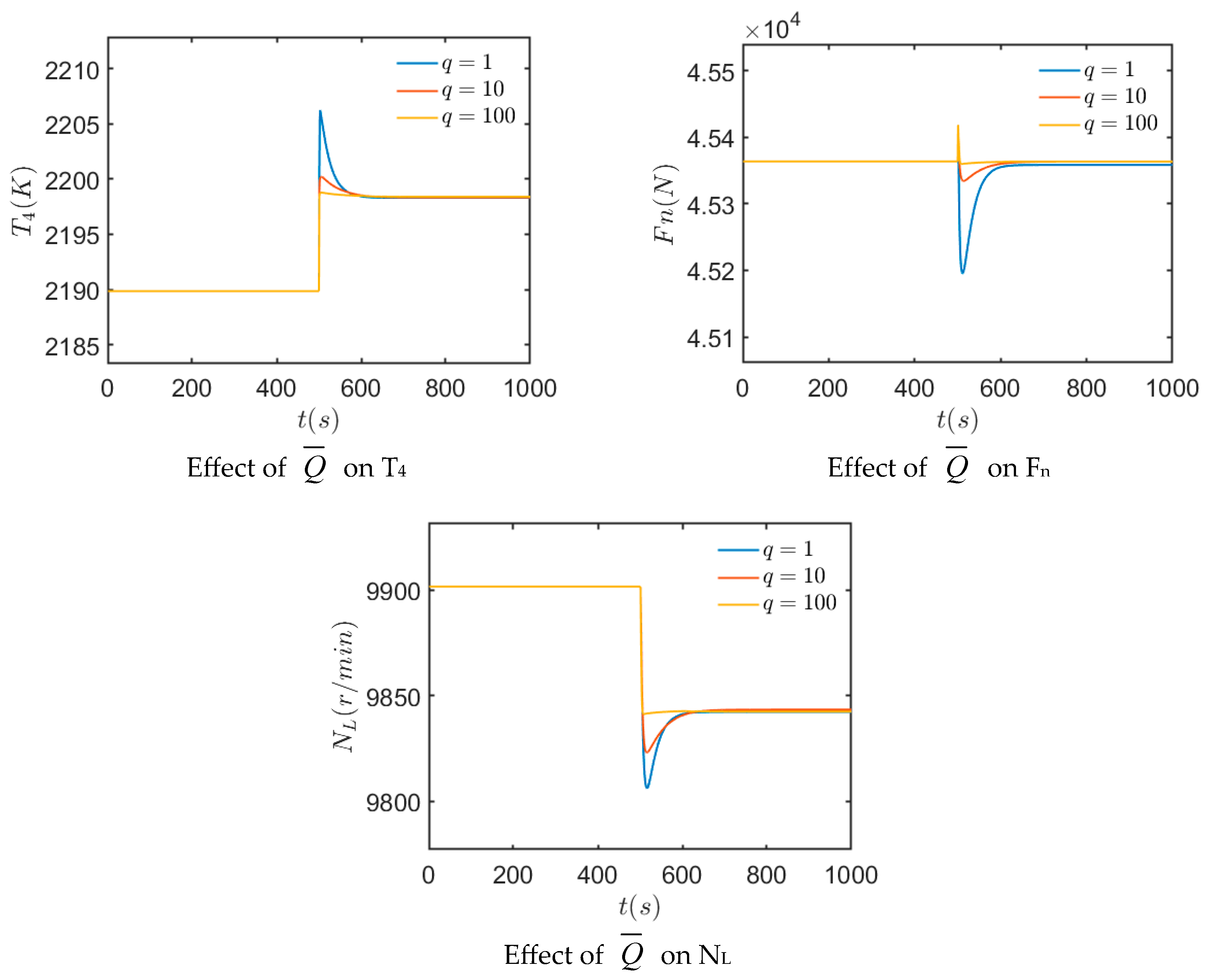
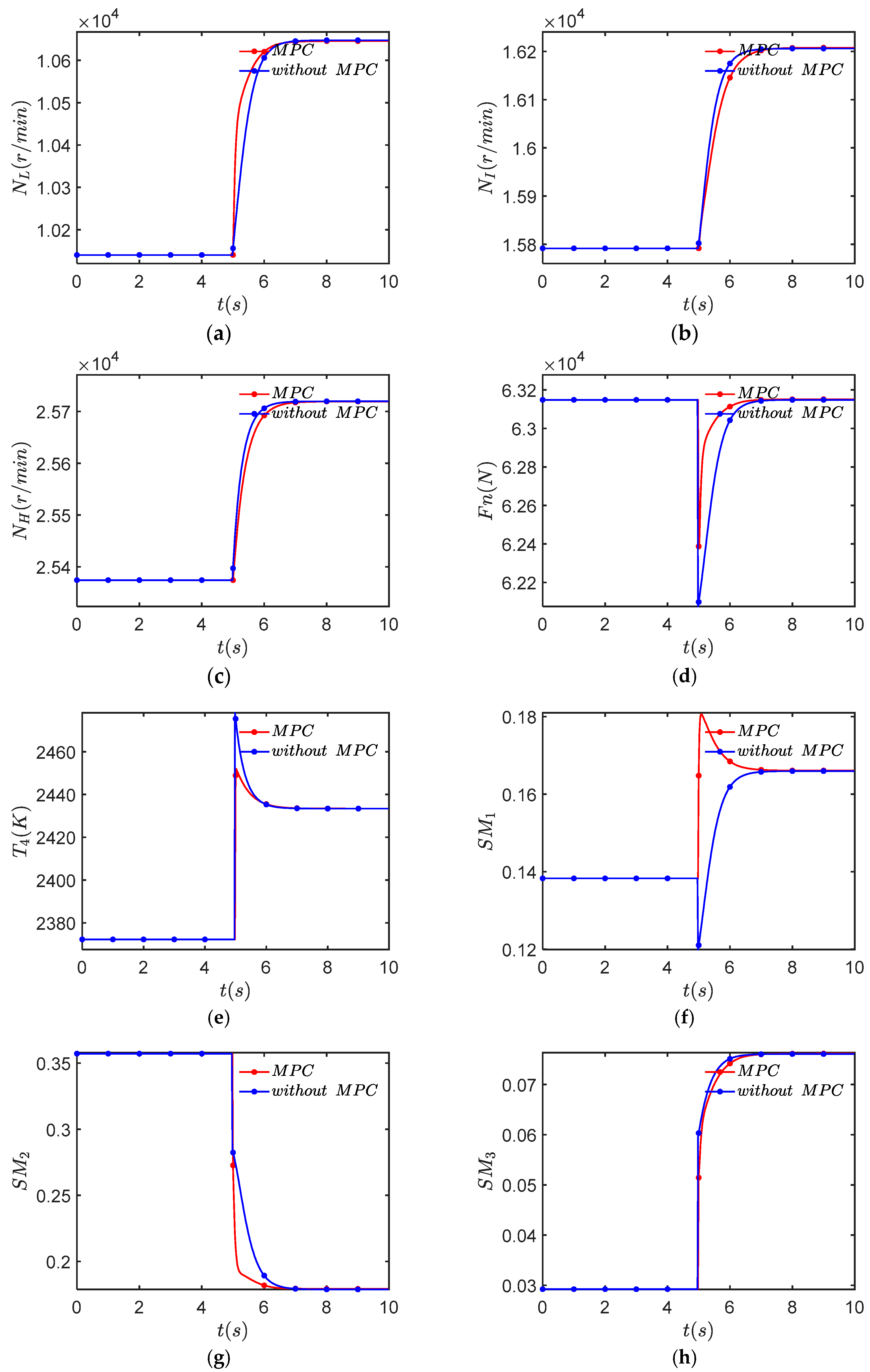
- In order to improve the response speed of the performance optimization control algorithm, a constraint protection method based on Model Predictive Control was studied. The results show that the temperature and surge margin overshoot problems are effectively suppressed in the minimum fuel consumption mode, which can make the engine work more safely.
- In order to solve the disadvantage of MPC with a large amount of online computation, some scholars have proposed Explicit Model Predictive Control (EMPC) to convert the online computation of MPC into offline computation. However, because the state quantity of the high-through-flow engine includes three speed quantities, the method of employing EMPC leads to more than 100 state partitions of a single steady-state point, which greatly increases the amount of offline computation so that it cannot be directly applied to aero-engine predictive control. Thus, it is a feasible strategy to reduce the model order by using the method of model order reduction first and then using the method of EMPC.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pan, X.; Wang, X.; Wang, R.; Wang, L. Infrared radiation and stealth characteristics prediction for supersonic aircraft with uncertainty. Infrared Phys. Technol. 2015, 73, 238–250. [Google Scholar] [CrossRef]
- Presz, W.; Nelson, C. Gas turbine exhaust cooling concepts. In Proceedings of the 30th Joint Propulsion Conference and Exhibit, Indianapolis, IN, USA, 27–29 June 1994. [Google Scholar]
- Chen, H.; Zhang, H.; Xi, Z.; Zheng, Q. Modeling of the turbofan with an ejector nozzle based on infrared prediction. Appl. Therm. Eng. 2019, 159, 113910. [Google Scholar] [CrossRef]
- Wang, F.; Ji, H.H.; Yu, M.F. Influence of total temperature and pressure at the inlet of convergent ex-haust system of turbofan engine on temperature distribution at plume centerline. J. Aerosp. Power 2016, 31, 816–822. [Google Scholar]
- Liu, Y.B.; Xu, Z.G.; Ye, D.X.; Chen, H.; Zheng, Q.; Zhang, H. A Study on Performance Seeking Control of Minimum Infrared Characteristic Mode for Turbofan Engine. J. Propuls. Technol. 2020, 41, 10. (In Chinese) [Google Scholar]
- Chen, H.; Zheng, Q.; Gao, Y.; Zhang, H. Performance Seeking Control of Minimum Infrared Characteristic on Double Bypass Variable Cycle Engine. Aerosp. Sci. Technol. 2020, 108, 106359. [Google Scholar] [CrossRef]
- Xu, Z.G. Research on Cycling Parameter Optimization and Modeling Technology of Low Infrared Turbofan Engine. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2020. [Google Scholar]
- Wang, Z.X.; Song, F.; Zhou, L.; Zhang, X.B. Research Progress on Numerical Scaling Technology for Aero Engines. J. Propuls. Technol. 2018, 39, 1441–1454. [Google Scholar]
- Shi, Y. Research on Full-State Performance Model of Civil Large-Bypass Ratio Turbofan Engine. Ph.D. thesis, Northwestern Polytechnical University, Xi’an, China, 2017. [Google Scholar]
- Yu, B.; Shu, W.; Cao, C. A Novel Modeling Method for Aircraft Engine Using Nonlinear Autoregressive Exogenous (NARX) Models Based on Wavelet Neural Networks. Int. J. Turbo Jet Engines 2018, 35, 161–169. [Google Scholar] [CrossRef]
- Dewei, X.; Qiangang, Z.; Haibo, Z.; Cheng, C.; Juan, F. Airborne adaptive steady-state model of aero engine based on NN-PSM. J. Aerodyn. 2022, 37, 409–423. [Google Scholar]
- Zhu, J.; Liu, Y.; Luo, W.; Guo, F. Thrust-matching and optimization design of turbine-based combined cycle engine with trajectory optimization. Int. J. Turbo Jet-Engines 2024, 41, 719–729. [Google Scholar] [CrossRef]
- Feng, J.; Tang, Y.; Zhu, S.; Deng, K.; Bai, S.; Li, S. Design of a combined organic Rankine cycle and turbo-compounding system recovering multigrade waste heat from a marine two-stroke engine. Energy 2024, 309, 133151. [Google Scholar] [CrossRef]
- Qureshi, R.R.; Ford, D.N.; Wolf, C.M. Descriptive design structure matrices for improved system dynamics qualitative modeling. Syst. Dyn. Rev. 2024, 40, e1764. [Google Scholar] [CrossRef]
- Schneider, S.J. Analysis of Turbine Blade Relative Cooling Flow Factor Used in the Subroutine Coolit Based on Film Cooling Correlations; National Aeronautics and Space Administration, Glenn Research Center: Cleveland, OH, USA, June 2015. [Google Scholar]
- Qingxi, W.; Xiaobo, G. Particle swarm optimization algorithm based on Lévy flight. Comput. Appl. Res. 2016, 33, 2588–2591. [Google Scholar]
- Wang, Y.; Liu, Y.; Wang, J.; Ma, L.; Cao, R.; Xu, Z. Optimization of aerospace engine bolt tightening based on Kriging model. Proc. Inst. Mech. Eng. 2024, 238, 9711–9725. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, C.; Chen, W.; Zhang, Z. Design and optimization of the exhaust system for an aviation piston engine. J. Phys. Conf. Ser. 2024, 2879, 012005. [Google Scholar] [CrossRef]
- Huang, X.; Wang, P.; Wang, Q.; Zhang, L.; Yang, W.; Li, L. An improved adaptive Kriging method for the possibility-based design optimization and its application to aeroengine turbine disk. Aerosp. Sci. Technol. 2024, 153, 109495. [Google Scholar] [CrossRef]
- Ghanbarpour, K.; Bayat, F.; Jalilvand, A. An MPC-based fault tolerant control of wind turbines in the presence of simultaneous sensor and actuator faults. Comput. Electr. Eng. 2024, 122, 109931. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Variable Meaning |
|---|---|
| Fuel flow of burner | |
| Fuel flow of multifunctional burner | |
| Guide angle of bypass injector 1 | |
| Guide angle of bypass injector 2 | |
| Guide angle of IPT | |
| Guide angle of LPT | |
| Throat area of nozzle |
| 0.5110 | 0.0080 | −0.0190 | 0.0560 | 0.0020 | 0.9040 | −0.0010 | ||
| 1.0000 | −0.2700 | 0.0430 | −0.0660 | 0.0060 | 0.4970 | 0.0010 | ||
| 0.9990 | −0.0110 | −0.0050 | 0.0030 | −0.0050 | 0.3220 | 0 | ||
| 0.3180 | 0.4900 | −0.0050 | 0.0150 | 0 | 0.2140 | 0 | ||
| 0.5930 | −0.0460 | 0.0030 | −0.0080 | 0 | 0.2140 | 0 | ||
| 0.2280 | −0.0910 | −0.0150 | 0.0040 | −0.0010 | 0.8720 | −0.0010 | ||
| −0.4270 | −0.0310 | 0.0520 | −0.0330 | 0.0090 | −0.8750 | 0.0010 | ||
| 0.4870 | −1.0010 | −0.1110 | 0.1980 | 0.2940 | −0.2930 | 0.0110 | ||
| −0.0740 | 0.0420 | −0.0060 | 0.0090 | −0.0030 | −0.0470 | 0 | ||
| −0.1960 | 0.5120 | 0.0120 | −0.0320 | −0.0320 | −0.4530 | 0.0010 | ||
| 0.08 | 0.085 | 0.09 | 0.095 | 0.1 | ||
|---|---|---|---|---|---|---|
| 2360 | 1.74% | 1.74% | 1.74% | 1.74% | 1.74% | |
| 2365 | 1.91% | 1.91% | 1.91% | 1.91% | 1.91% | |
| 2370 | 2.08% | 2.08% | 2.08% | 2.08% | 2.08% | |
| 2375 | 2.25% | 2.25% | 2.25% | 2.25% | 2.25% | |
| 2380 | 2.37% | 2.37% | 2.37% | 2.37% | 2.37% | |
| 2385 | 2.38% | 2.38% | 2.38% | 2.38% | 2.38% | |
| 2390 | 2.40% | 2.40% | 2.40% | 2.40% | 2.40% | |
| 2395 | 2.42% | 2.42% | 2.42% | 2.42% | 2.42% | |
| 2400 | 2.44% | 2.44% | 2.44% | 2.44% | 2.44% | |
| 2405 | 2.45% | 2.45% | 2.45% | 2.45% | 2.45% | |
| 2410 | 2.48% | 2.48% | 2.48% | 2.48% | 2.48% | |
| 2415 | 2.51% | 2.51% | 2.51% | 2.51% | 2.51% | |
| 2420 | 2.55% | 2.55% | 2.55% | 2.55% | 2.55% | |
| 2425 | 2.56% | 2.56% | 2.56% | 2.56% | 2.56% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, H.; Zhang, Y.; Yu, B. Research on Optimization Technology of Minimum Specific Fuel Consumption for Triple-Bypass Variable Cycle Engine. Aerospace 2025, 12, 10. https://doi.org/10.3390/aerospace12010010
Guo H, Zhang Y, Yu B. Research on Optimization Technology of Minimum Specific Fuel Consumption for Triple-Bypass Variable Cycle Engine. Aerospace. 2025; 12(1):10. https://doi.org/10.3390/aerospace12010010
Chicago/Turabian StyleGuo, Haonan, Yuhua Zhang, and Bing Yu. 2025. "Research on Optimization Technology of Minimum Specific Fuel Consumption for Triple-Bypass Variable Cycle Engine" Aerospace 12, no. 1: 10. https://doi.org/10.3390/aerospace12010010
APA StyleGuo, H., Zhang, Y., & Yu, B. (2025). Research on Optimization Technology of Minimum Specific Fuel Consumption for Triple-Bypass Variable Cycle Engine. Aerospace, 12(1), 10. https://doi.org/10.3390/aerospace12010010