
Leader-Following Connectivity Preservation and Collision Avoidance Control for Multiple Spacecraft with Bounded Actuation


Abstract
1. Introduction
2. Problem Statement
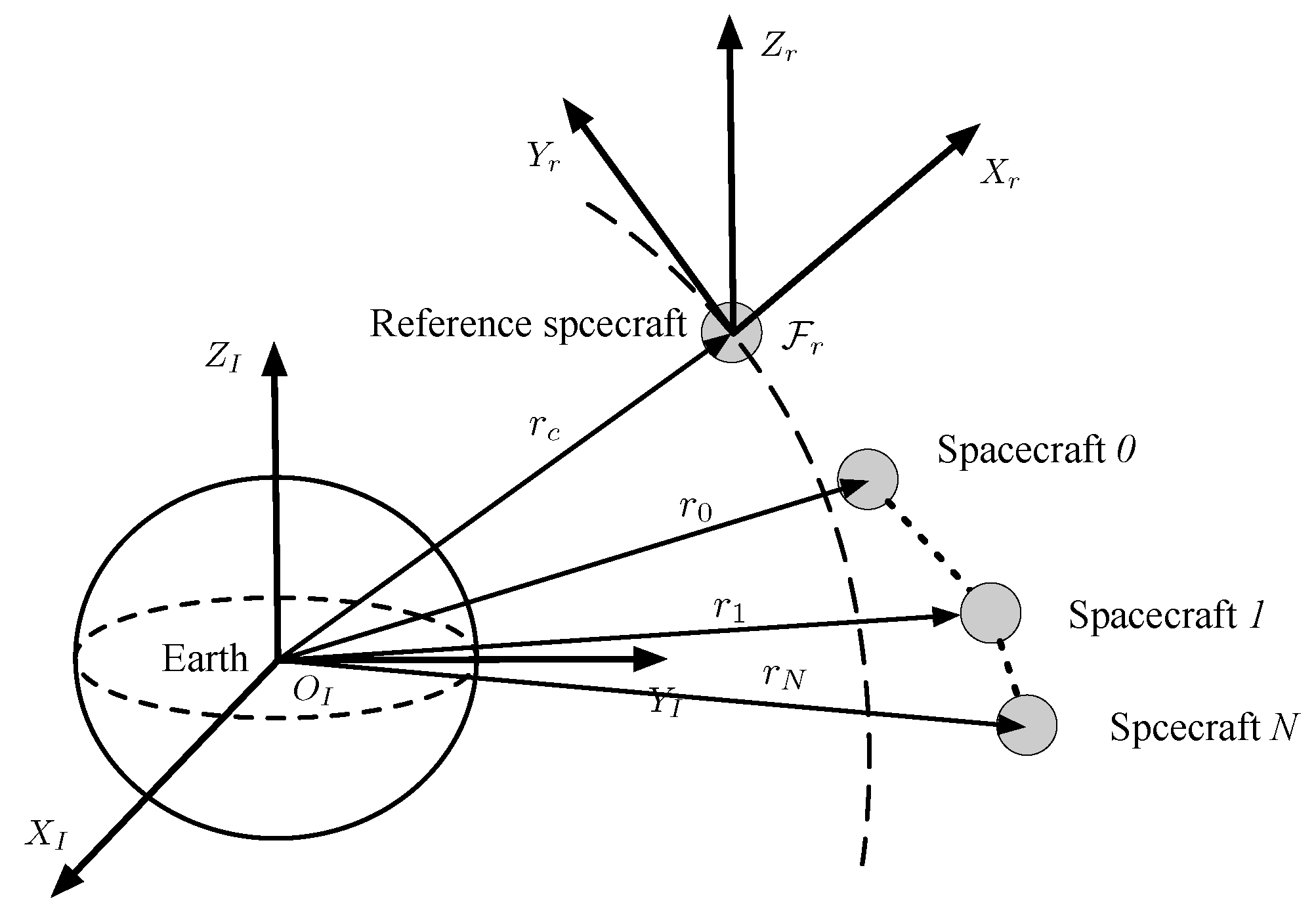
2.1. Spacecraft Relative Dynamics
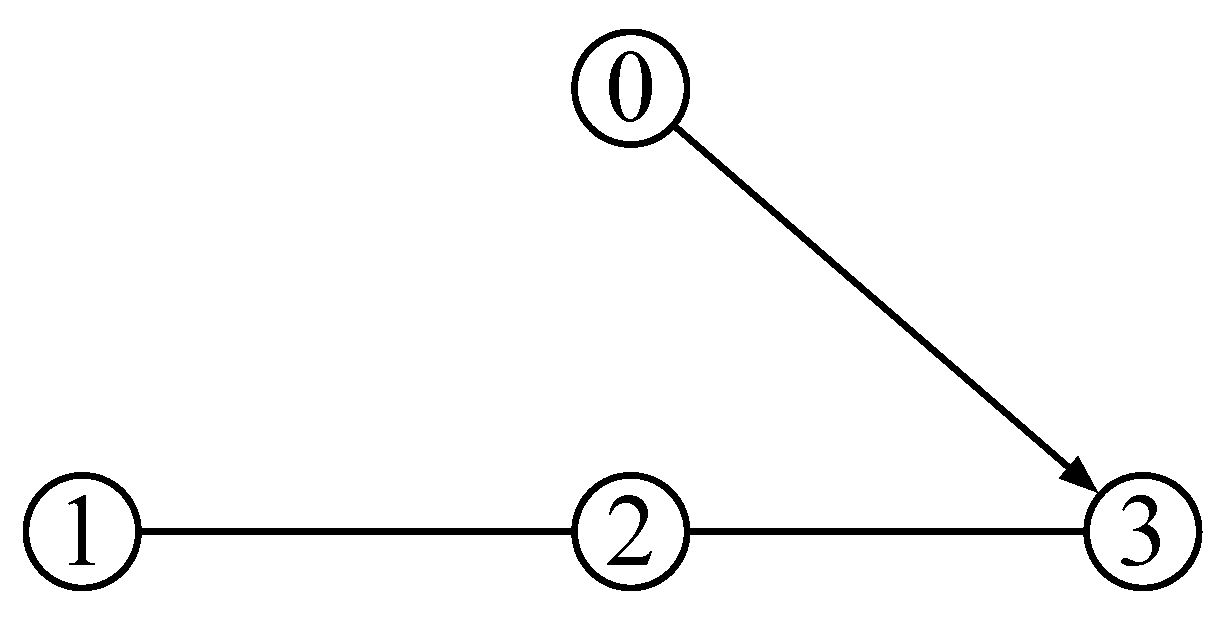
2.2. The Dynamic Graph Model
2.3. Control Objective
- If , then , , where is a small constant;
- , ;
- , for all as ;
- , for all as .
3. Controller Design
3.1. Virtual Proxy Spacecraft Design
- 1.
- is a convex function.
- 2.
- Within the domain , achieves its maximum while and its minimum while .
- 3.
- Letwhere . If , then .
3.2. Controller Design for a Leader with Constant Velocity
- (1)
- If , then , ;
- (2)
- , ;
- (3)
- , for all as ;
- (4)
- , for all as .
3.3. Controller Design for a Leader with Time-Varying Velocity
- (1)
- If , then , ;
- (2)
- , ;
- (3)
- , for all as ;
- (4)
- , for all as .
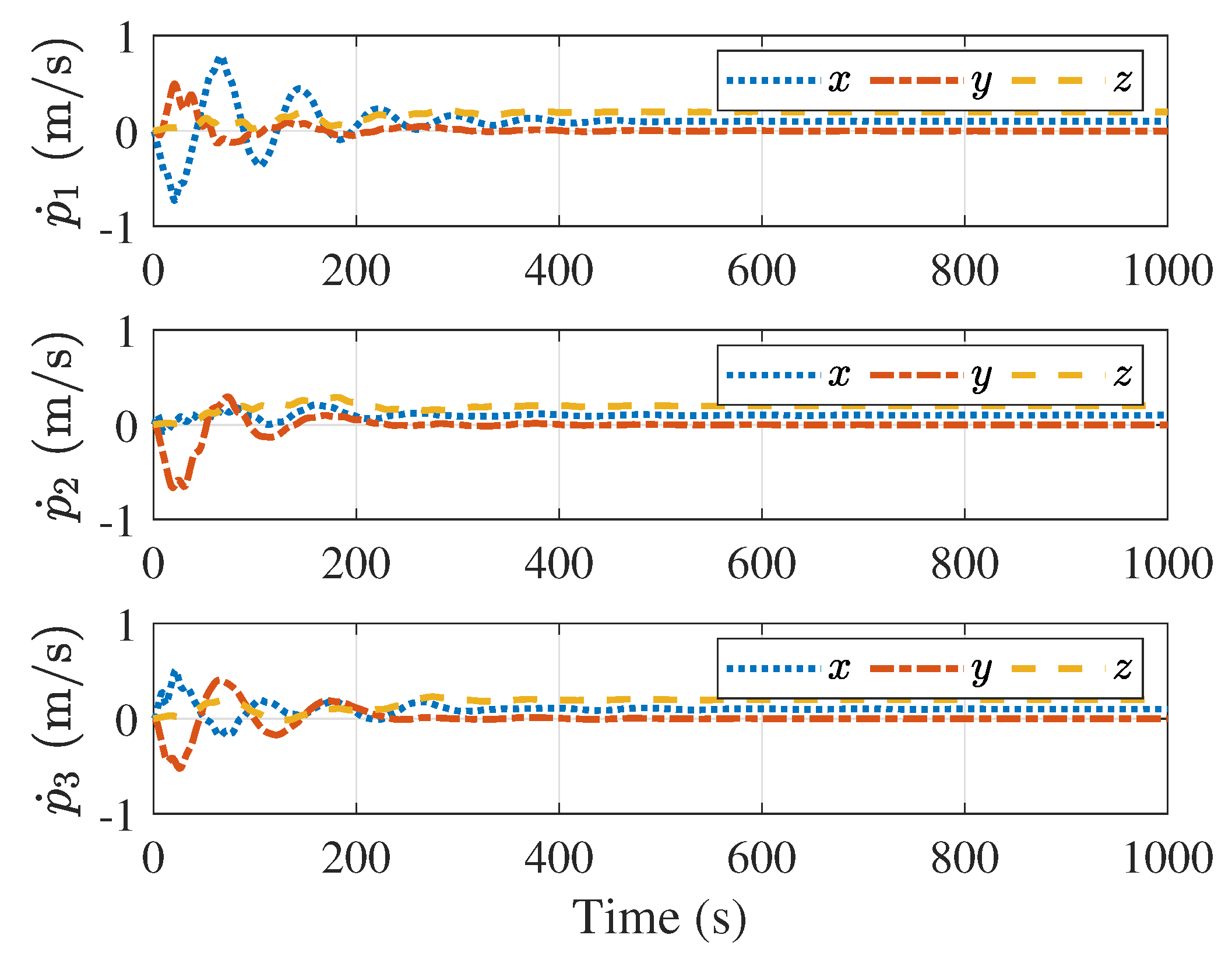
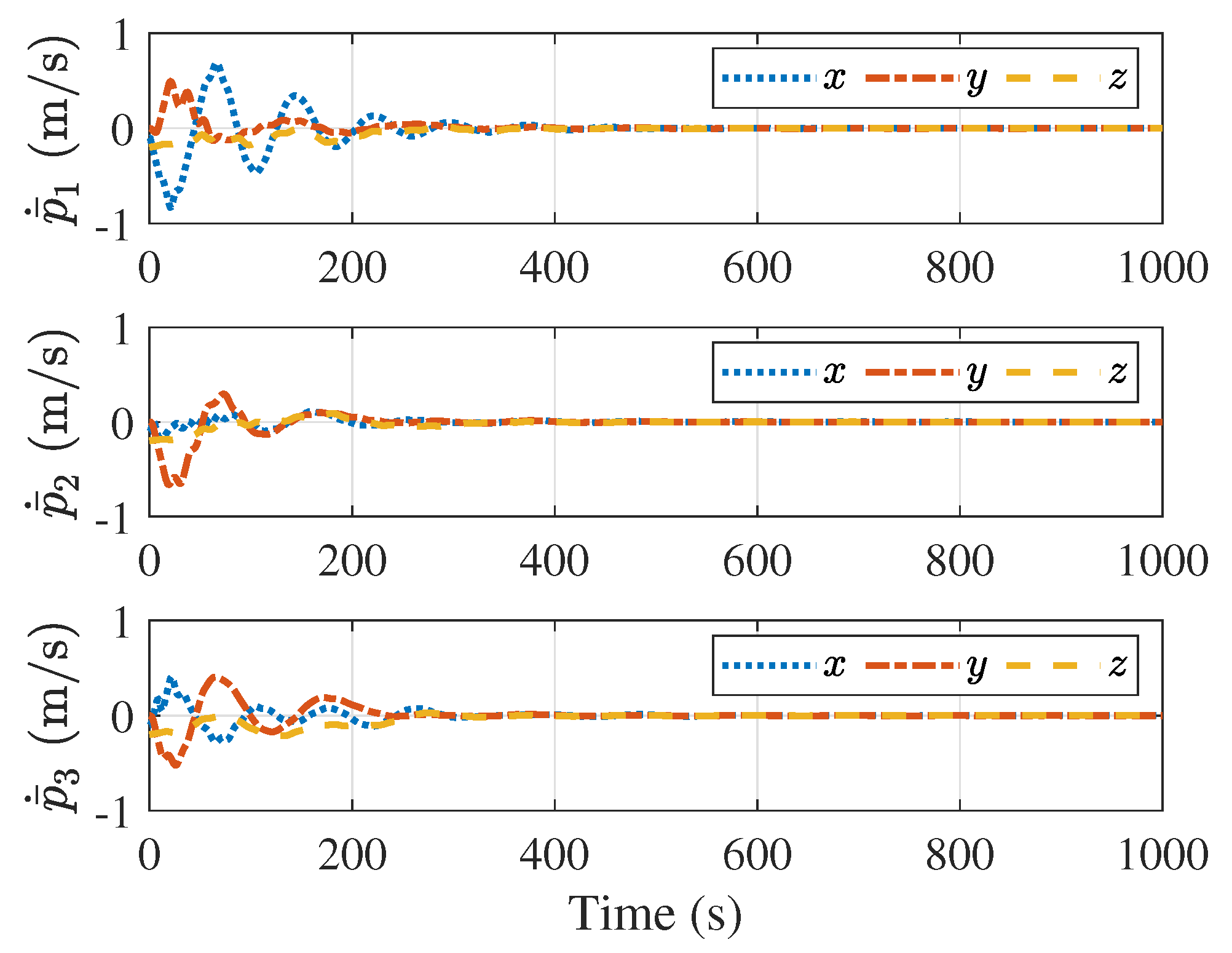
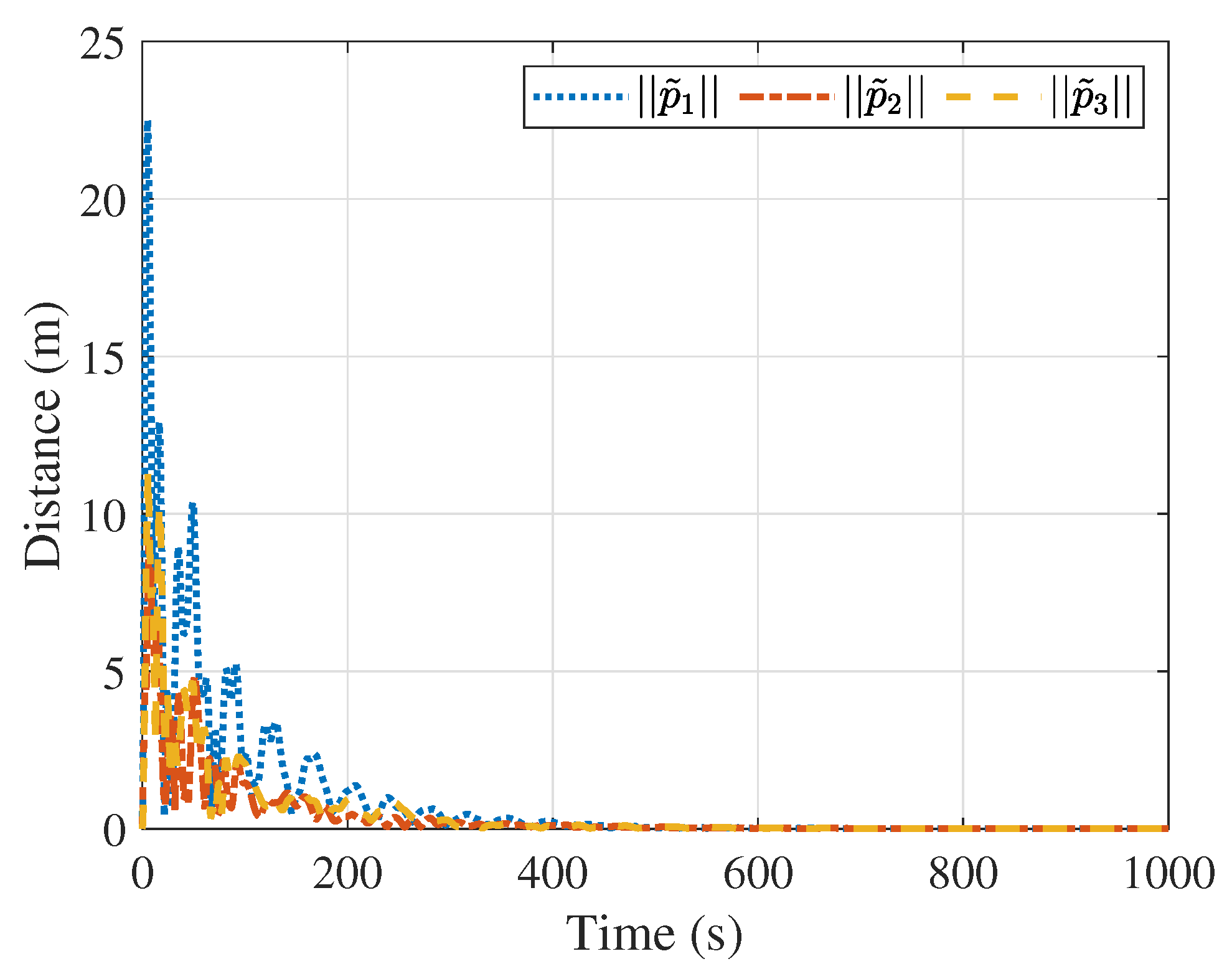
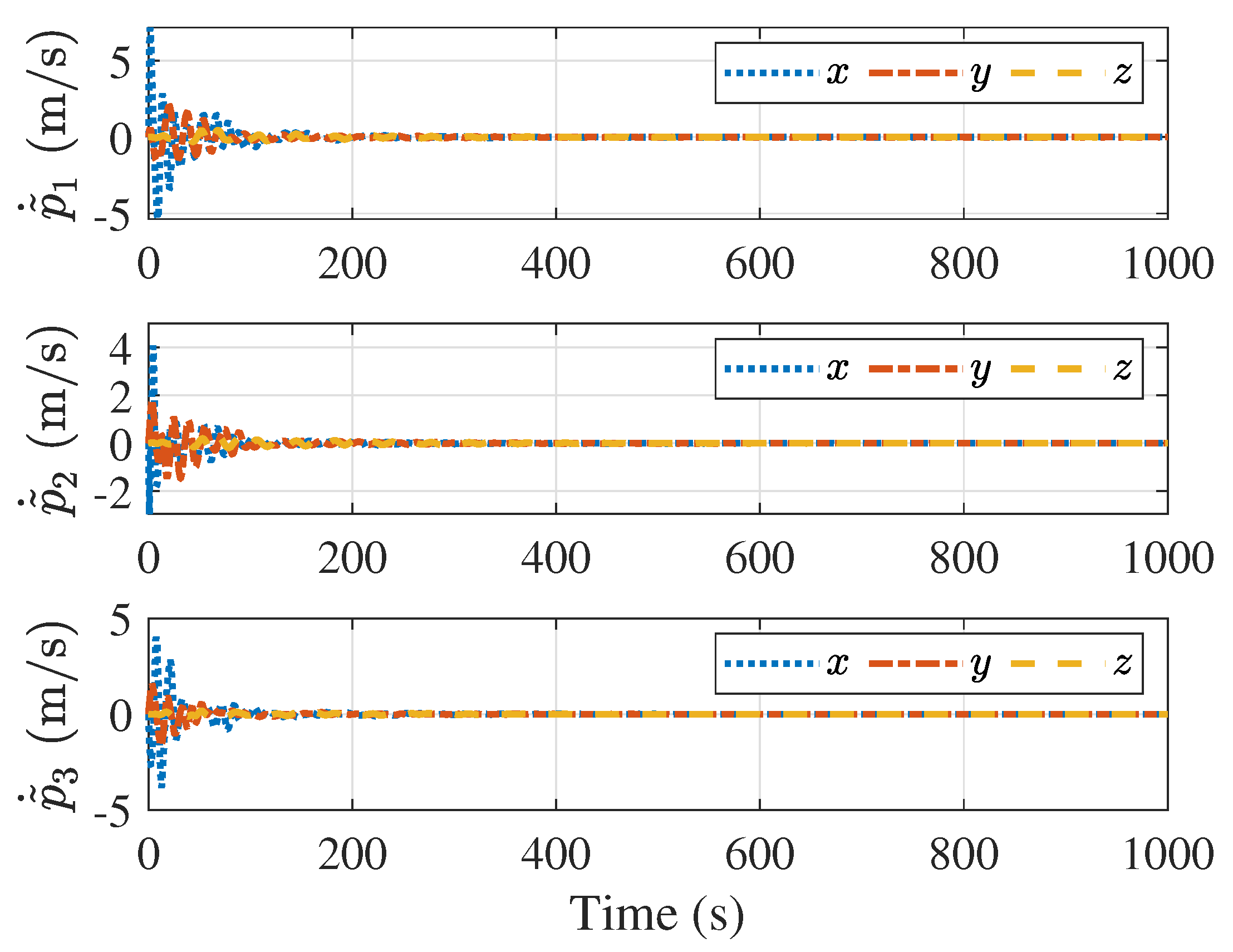
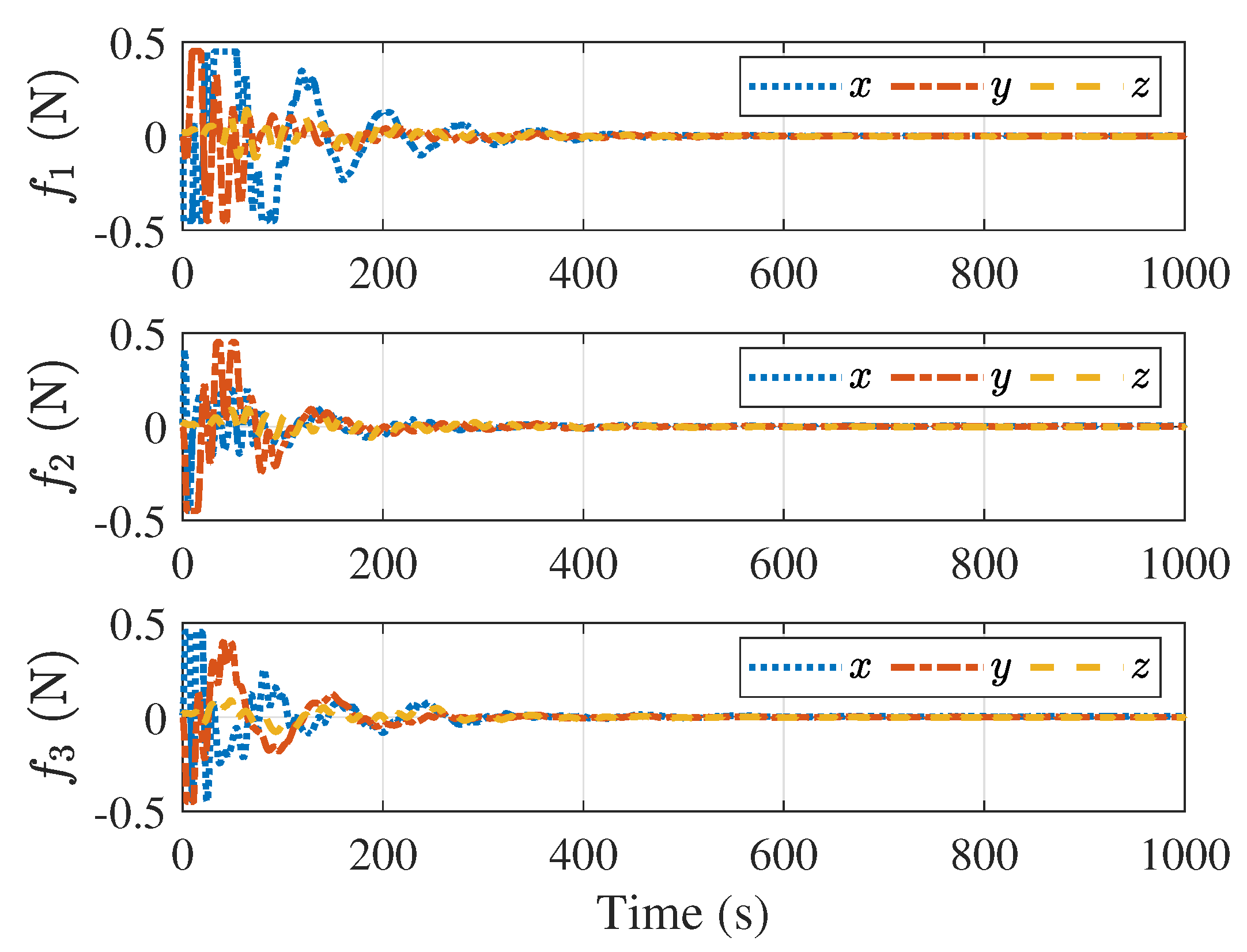
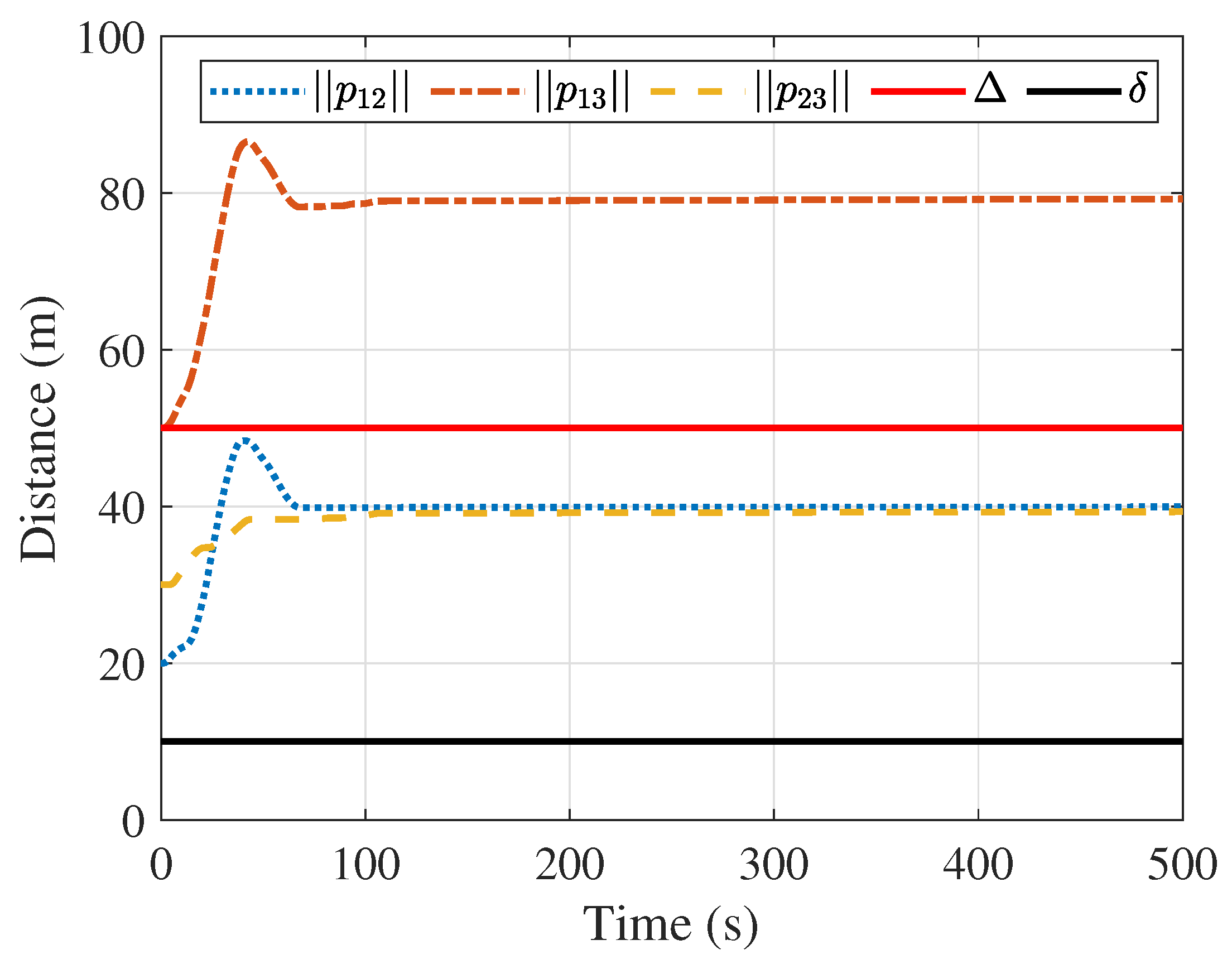
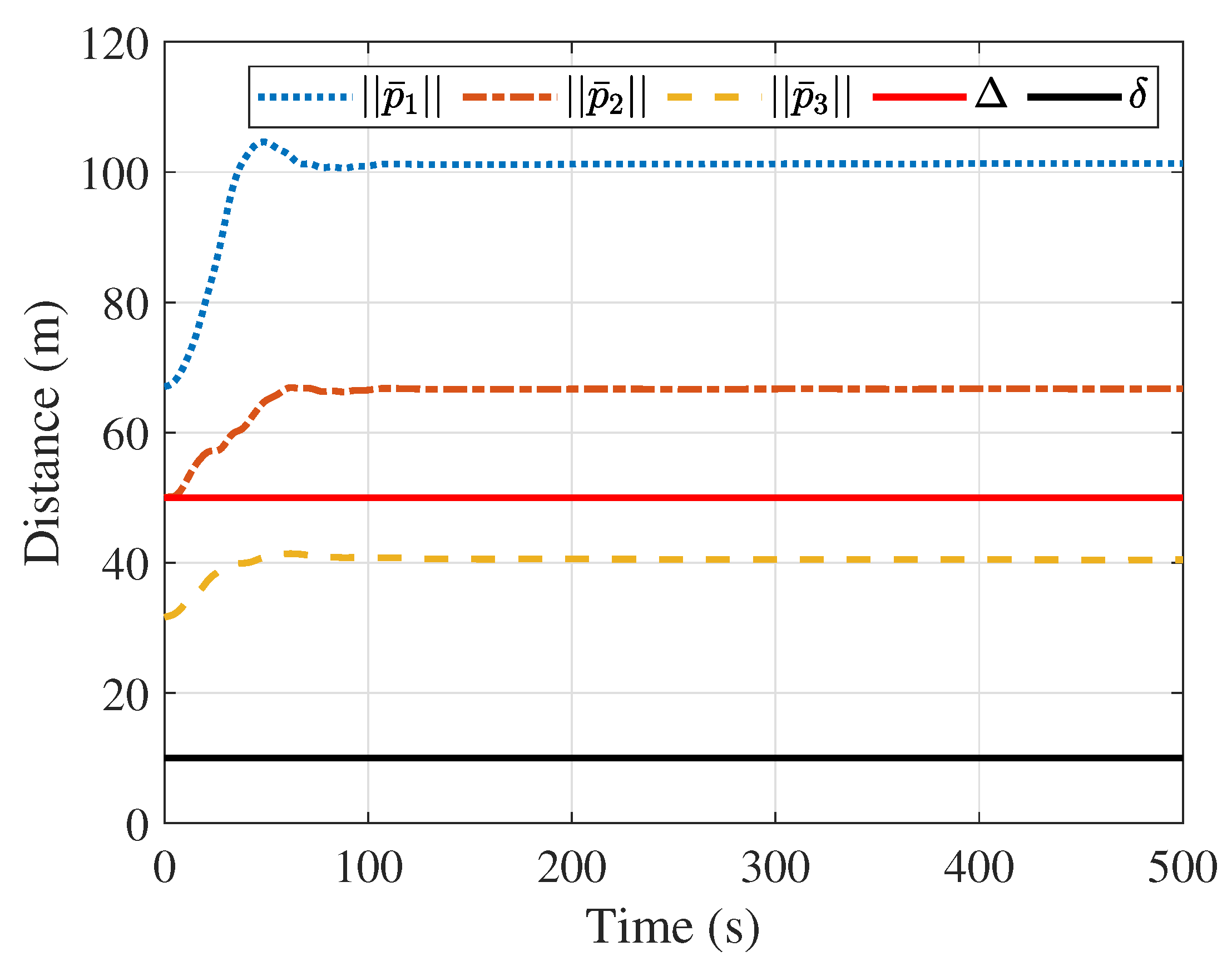
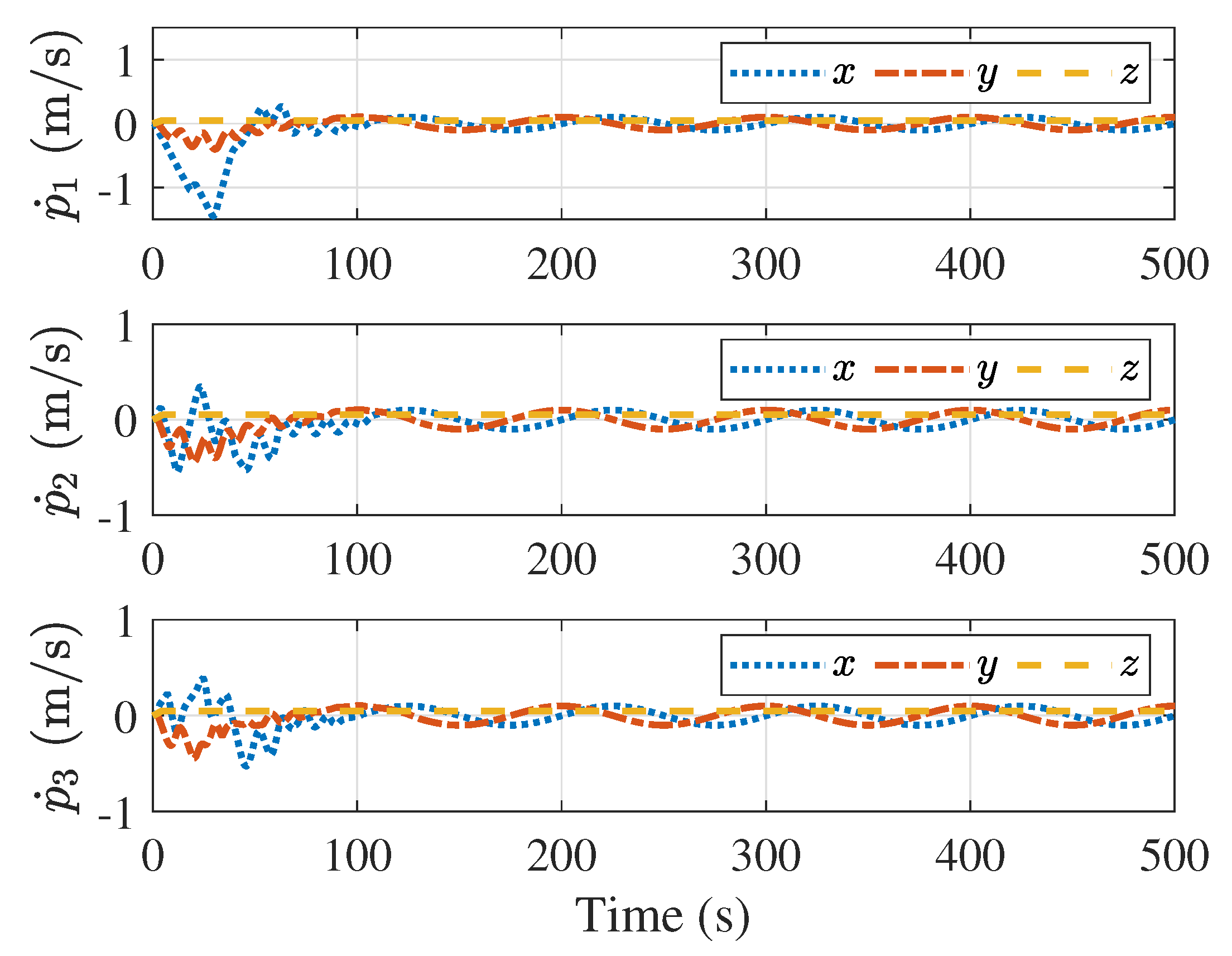
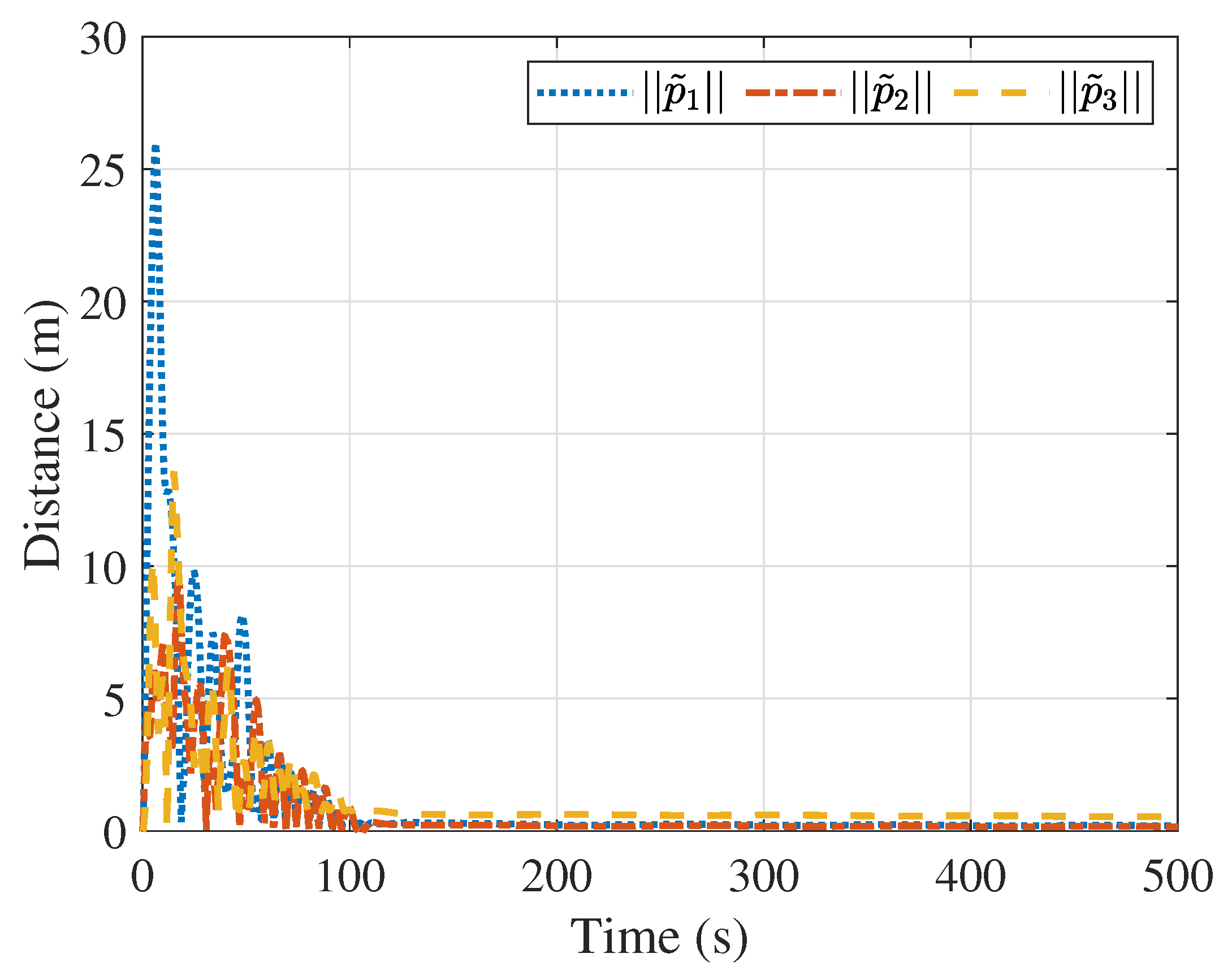
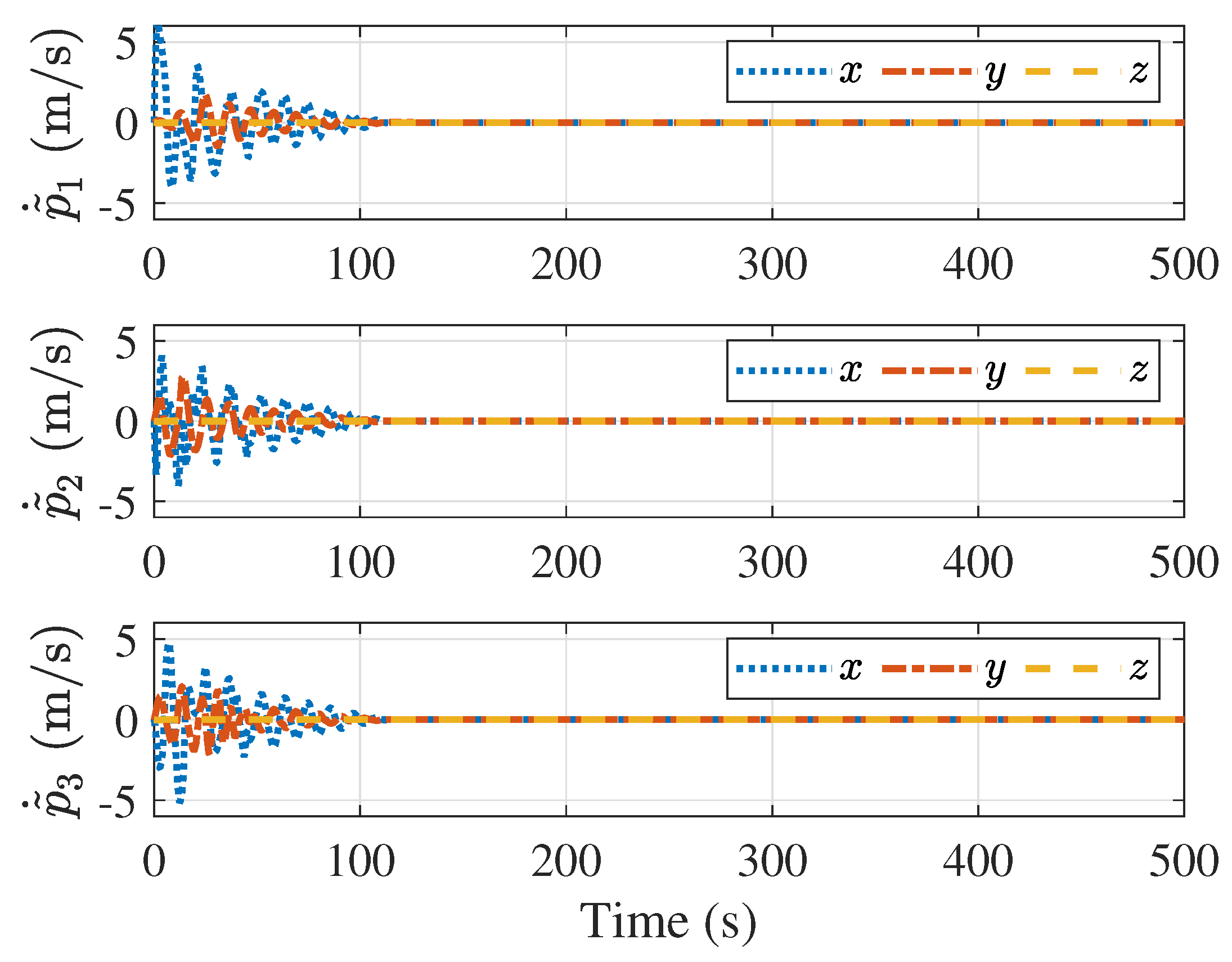
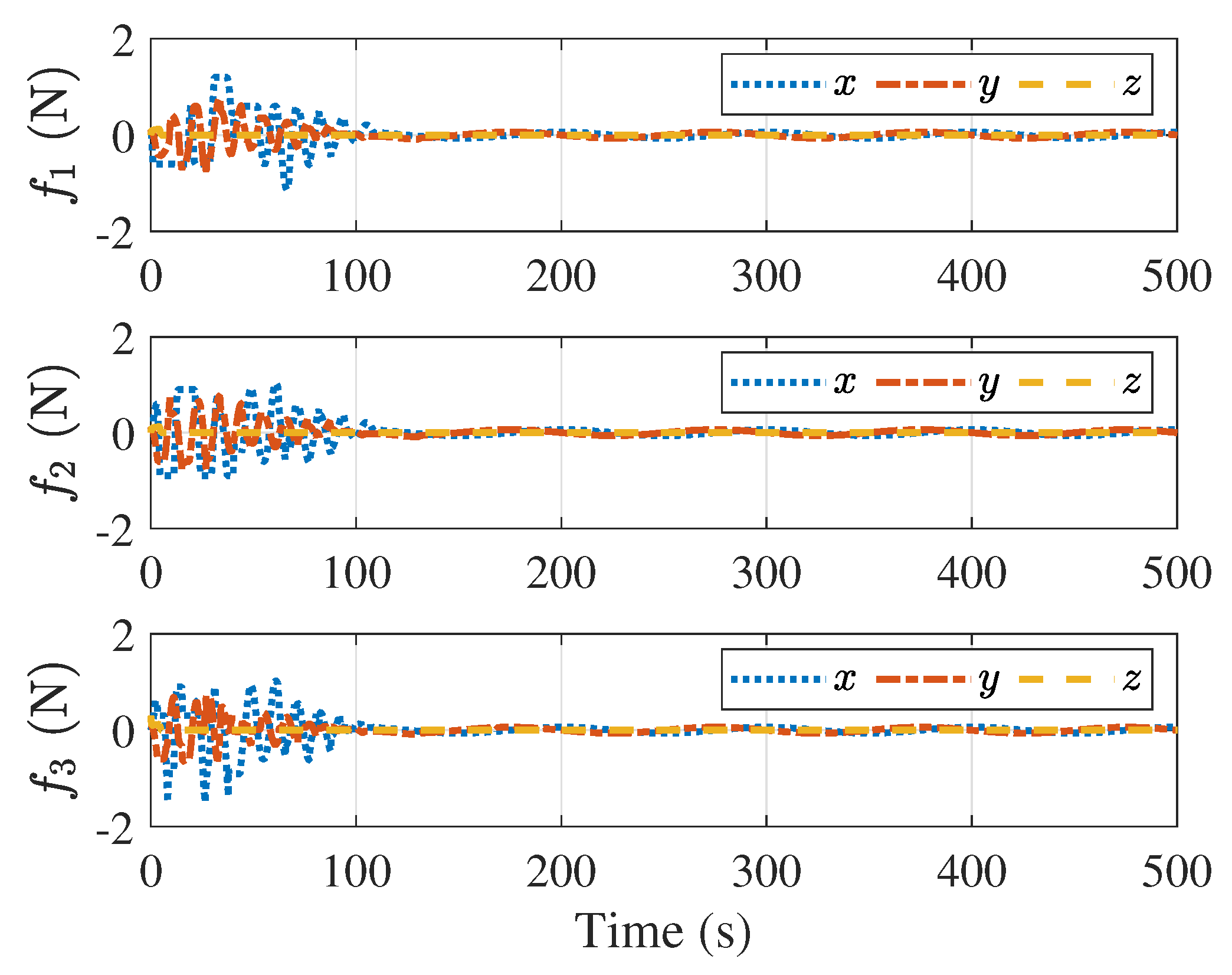
4. Simulations
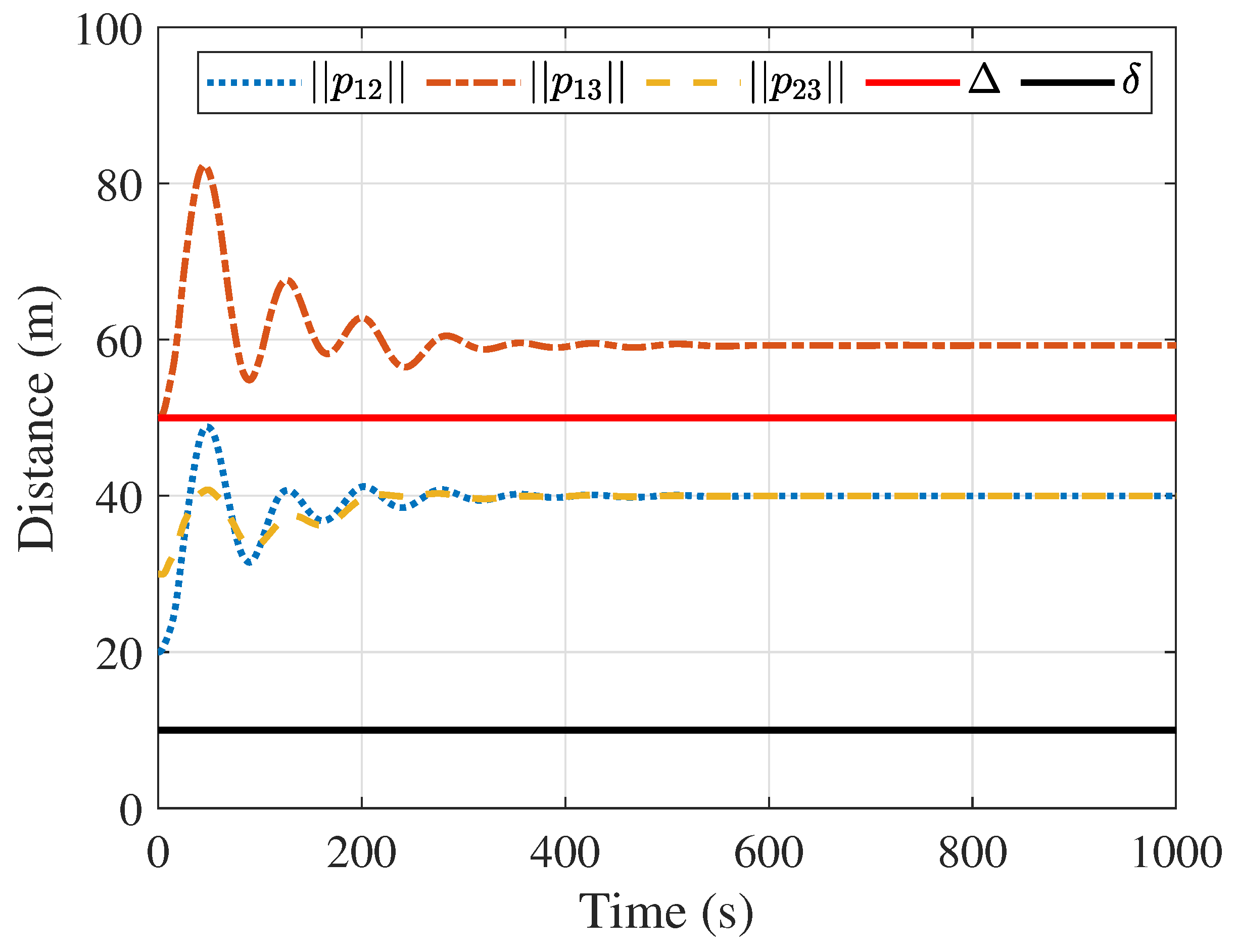
4.1. Leader with Constant Velocity
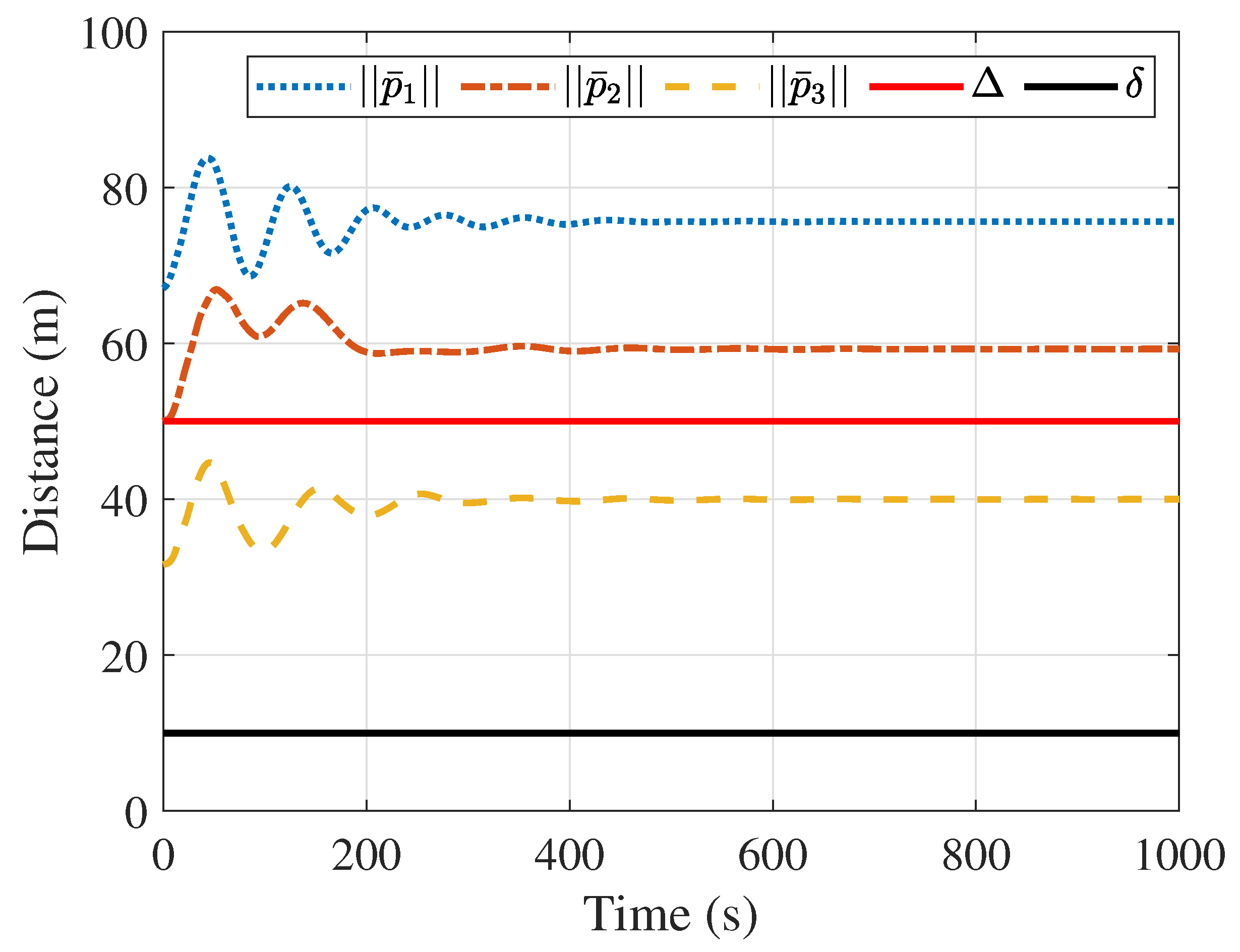
4.2. Leader with Time-Varying Velocity
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, G.; Zhang, S. A Survey on Formation Control of Small Satellites. Proc. IEEE 2018, 106, 440–457. [Google Scholar] [CrossRef]
- Scharf, D.P.; Hadaegh, F.Y.; Ploen, S.R. A survey of spacecraft formation flying guidance and control. Part II: Control. Am. Control Conf. 2004, 4, 2976–2985. [Google Scholar]
- Song, Y.; Zhou, Q.; Chen, Q. Control of electromagnetic formation flight of two satellites in low earth orbits. Aerospace 2023, 10, 229. [Google Scholar] [CrossRef]
- Bandyopadhyay, S.; Foust, R.; Subramanian, G.P.; Chung, S.J.; Hadaegh, F.Y. Review of Formation Flying and Constellation Missions Using Nanosatellites. J. Spacecr. Rocket. 2016, 53, 567–578. [Google Scholar] [CrossRef]
- Ivanov, D.; Amaro, G.; Mashtakov, Y.; Ovchinnikov, M.; Guerman, A. Formation Flying Lyapunov-Based Control Using Lorentz Forces. Aerospace 2023, 10, 39. [Google Scholar] [CrossRef]
- Yue, X.; Xue, X.; Wen, H.; Yuan, J. Adaptive control for attitude coordination of leader-following rigid spacecraft systems with inertia parameter uncertainties. Chin. J. Aeronaut. 2019, 32, 688–700. [Google Scholar]
- Felicetti, L.; Palmerini, G.B. Attitude coordination strategies in satellite constellations and formation flying. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015; pp. 1–13. [Google Scholar]
- McInnes, C.R. Autonomous ring formation for a planar constellation of satellites. J. Guid. Control Dyn. 1995, 18, 1215–1217. [Google Scholar] [CrossRef]
- Palmerini, G.B. Guidance strategies for satellite formations. In Proceedings of the AAS/AIAA Astrodynamics Conference, Girdwood, AK, USA, 16–19 August 1999; pp. 135–145. [Google Scholar]
- Huang, X.; Yan, Y.; Zhou, Y. Underactuated spacecraft formation reconfiguration with collision avoidance. Acta Astronaut. 2017, 131, 166–181. [Google Scholar] [CrossRef]
- Cao, L.; Qiao, D.; Xu, J. Suboptimal artificial potential function sliding mode control for spacecraft rendezvous with obstacle avoidance. Acta Astronaut. 2018, 143, 133–146. [Google Scholar] [CrossRef]
- Kristiansen, R.; Nicklasson, P.J.; Gravdahl, J.T. Spacecraft coordination control in 6DOF: Integrator backstepping vs passivity-based control. Automatica 2008, 44, 2896–2901. [Google Scholar] [CrossRef]
- Ran, D.; Chen, X.; Misra, A.K.; Xiao, B. Relative position coordinated control for spacecraft formation flying with communication delays. Acta Astronaut. 2017, 137, 302–311. [Google Scholar] [CrossRef]
- Wu, X.; Bai, W.; Xie, Y.; Zhang, X.; Song, T. Predefined-Performance-Based Full-Process Control for Ultra-Close and High-Precision Formation Flying. Aerospace 2023, 10, 152. [Google Scholar] [CrossRef]
- Zou, A.M.; de Ruiter, A.H.; Kumar, K.D. Distributed finite-time velocity-free attitude coordination control for spacecraft formations. Automatica 2016, 67, 46–53. [Google Scholar] [CrossRef]
- Knorn, S.; Chen, Z.; Middleton, R.H. Overview: Collective control of multiagent systems. IEEE Trans. Control Netw. Syst. 2016, 3, 334–347. [Google Scholar] [CrossRef]
- Stephan, J.; Fink, J.; Kumar, V.; Ribeiro, A. Concurrent control of mobility and communication in multirobot systems. IEEE Trans. Robot. 2017, 33, 1248–1254. [Google Scholar] [CrossRef]
- Li, C.; Qu, Z.; Qi, D.; Wang, F. Distributed Finite-Time Estimation of the Bounds on Algebraic Connectivity for Directed Graphs. Automatica 2019, 107, 289–295. [Google Scholar] [CrossRef]
- Ji, M.; Egerstedt, M. Distributed coordination control of multiagent systems while preserving connectedness. IEEE Trans. Robot. 2007, 23, 693–703. [Google Scholar] [CrossRef]
- Cao, Y.; Ren, W. Distributed coordinated tracking with reduced interaction via a variable structure approach. IEEE Trans. Autom. Control 2012, 57, 33–48. [Google Scholar]
- Yi, J.; Li, J.; Zhang, Z. Fixed-Time Connectivity-Preserving Consensus of Periodically Disturbed Nonlinear Multi-Agent Systems with Limited Communication Ranges. ISA Trans. 2023, 138, 291–300. [Google Scholar] [CrossRef]
- Restrepo, E.; Loría, A.; Sarras, I.; Marzat, J. Edge-Based Strict Lyapunov Functions for Consensus with Connectivity Preservation over Directed Graphs. Automatica 2021, 132, 109812. [Google Scholar] [CrossRef]
- Qu, Z.; Li, C.; Lewis, F. Cooperative control with distributed gain adaptation and connectivity estimation for directed networks. Int. J. Robust Nonlinear Control 2014, 24, 450–476. [Google Scholar] [CrossRef]
- Yang, Y.; Shi, Y.; Constantinescu, D. Connectivity-preserving synchronization of time-delay Euler–Lagrange networks with bounded actuation. IEEE Trans. Cybern. 2021, 51, 3469–3482. [Google Scholar] [CrossRef] [PubMed]
- Gasparri, A.; Sabattini, L.; Ulivi, G. Bounded control law for global connectivity maintenance in cooperative multirobot systems. IEEE Trans. Robot. 2017, 33, 700–717. [Google Scholar] [CrossRef]
- Restrepo, E.; Loria, A.; Sarras, I.; Marzat, J. Robust Consensus of High-Order Systems under Output Constraints: Application to Rendezvous of Underactuated UAVs. IEEE Trans. Autom. Control 2023, 68, 329–342. [Google Scholar] [CrossRef]
- Xue, X.; Yue, X.; Yuan, J. Distributed Connectivity Maintenance and Collision Avoidance Control of Spacecraft Formation Flying. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 8265–8270. [Google Scholar]
- Ghapani, S.; Mei, J.; Ren, W.; Song, Y. Fully distributed flocking with a moving leader for Lagrange networks with parametric uncertainties. Automatica 2016, 67, 67–76. [Google Scholar] [CrossRef]
- Shi, Y.; Hu, Q. Event-driven connectivity-preserving coordinated control for multiple spacecraft systems with a distance-dependent dynamic graph. IEEE Trans. Cybern. 2021, 52, 12551–12560. [Google Scholar] [CrossRef] [PubMed]
- Xue, X.; Yue, X.; Yuan, J. Connectivity Preservation and Collision Avoidance Control for Spacecraft Formation Flying in the Presence of Multiple Obstacles. Adv. Space Res. 2021, 67, 3504–3514. [Google Scholar] [CrossRef]
- Chen, Z.; Emami, M.R.; Chen, W. Connectivity preservation and obstacle avoidance in small multi-spacecraft formation with distributed adaptive tracking control. J. Intell. Robot. Syst. 2021, 101, 1–23. [Google Scholar] [CrossRef]
- Wei, C.; Wu, X.; Xiao, B.; Wu, J.; Zhang, C. Adaptive Leader-Following Performance Guaranteed Formation Control for Multiple Spacecraft with Collision Avoidance and Connectivity Assurance. Aerosp. Sci. Technol. 2022, 120, 107266. [Google Scholar] [CrossRef]
- Xue, X.; Yue, X.; Yuan, J. Connectivity Preservation and Collision Avoidance Control for Spacecraft Formation Flying with Bounded Actuation. In Proceedings of the 2020 International Conference on Guidance, Navigation and Control, Tianjin, China, 23–25 October 2020; Springer: Berlin/Heidelberg, Germany, 2022; pp. 3685–3697. [Google Scholar]
- Kristiansen, R.; Nicklasson, P.J. Spacecraft formation flying: A review and new results on state feedback control. Acta Astronaut. 2009, 65, 1537–1552. [Google Scholar] [CrossRef]
- Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods in Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010; Volume 33. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Li, X.; Sun, D.; Yang, J. A bounded controller for multirobot navigation while maintaining network connectivity in the presence of obstacles. Automatica 2013, 49, 285–292. [Google Scholar] [CrossRef]
- Zavala-Rio, A.; Santibanez, V. A natural saturating extension of the PD-with-desired-gravity-compensation control law for robot manipulators with bounded inputs. IEEE Trans. Robot. 2007, 23, 386–391. [Google Scholar] [CrossRef]
- Yang, Y.; Constantinescu, D.; Shi, Y. Connectivity-preserving consensus of multi-agent systems with bounded actuation. arXiv 2018, arXiv:1803.09309. [Google Scholar]
- Wen, G.; Duan, Z.; Su, H.; Chen, G.; Yu, W. A connectivity-preserving flocking algorithm for multi-agent dynamical systems with bounded potential function. IET Control Theory Appl. 2012, 6, 813–821. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbital Parameter | Value |
|---|---|
| Eccentricity | |
| Inclination | 30° |
| Longitude ascending node | 50° |
| Semi-major axis | 6971 km |
| Argument of perigee | 30° |
| Initial true anomaly | 20° |
| Gravitational parameter |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, X.; Wang, X.; Han, N. Leader-Following Connectivity Preservation and Collision Avoidance Control for Multiple Spacecraft with Bounded Actuation. Aerospace 2024, 11, 612. https://doi.org/10.3390/aerospace11080612
Xue X, Wang X, Han N. Leader-Following Connectivity Preservation and Collision Avoidance Control for Multiple Spacecraft with Bounded Actuation. Aerospace. 2024; 11(8):612. https://doi.org/10.3390/aerospace11080612
Chicago/Turabian StyleXue, Xianghong, Xin Wang, and Nannan Han. 2024. "Leader-Following Connectivity Preservation and Collision Avoidance Control for Multiple Spacecraft with Bounded Actuation" Aerospace 11, no. 8: 612. https://doi.org/10.3390/aerospace11080612
APA StyleXue, X., Wang, X., & Han, N. (2024). Leader-Following Connectivity Preservation and Collision Avoidance Control for Multiple Spacecraft with Bounded Actuation. Aerospace, 11(8), 612. https://doi.org/10.3390/aerospace11080612