
Implementing a Multi-Attribute Decision-Making-Based Approach to Evaluate Small Electric Vertical Takeoff and Landing Fixed-Wing Drones with Mission Efficiency


Abstract
1. Introduction
2. Methodology
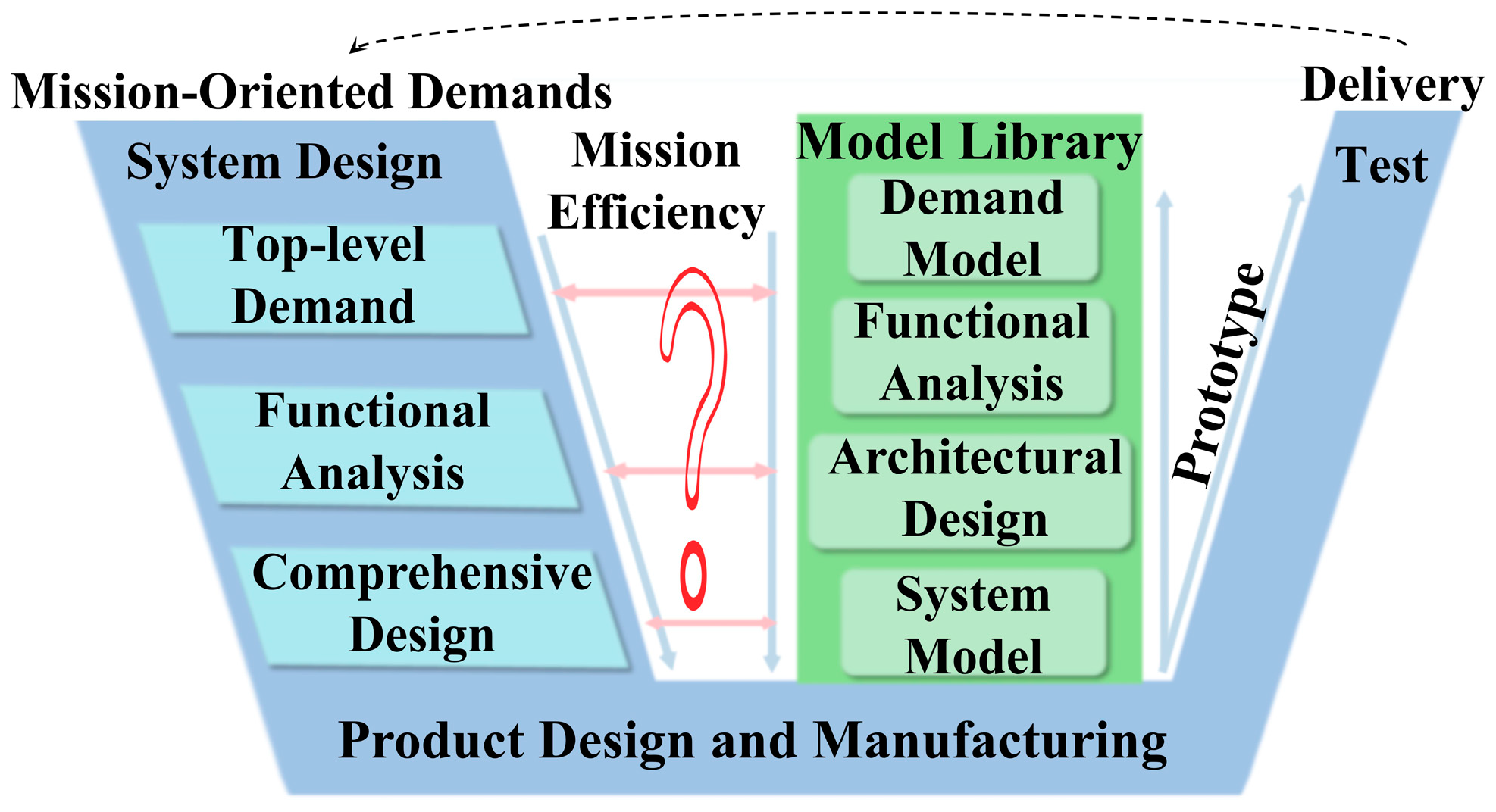
2.1. Definition of Mission Efficiency
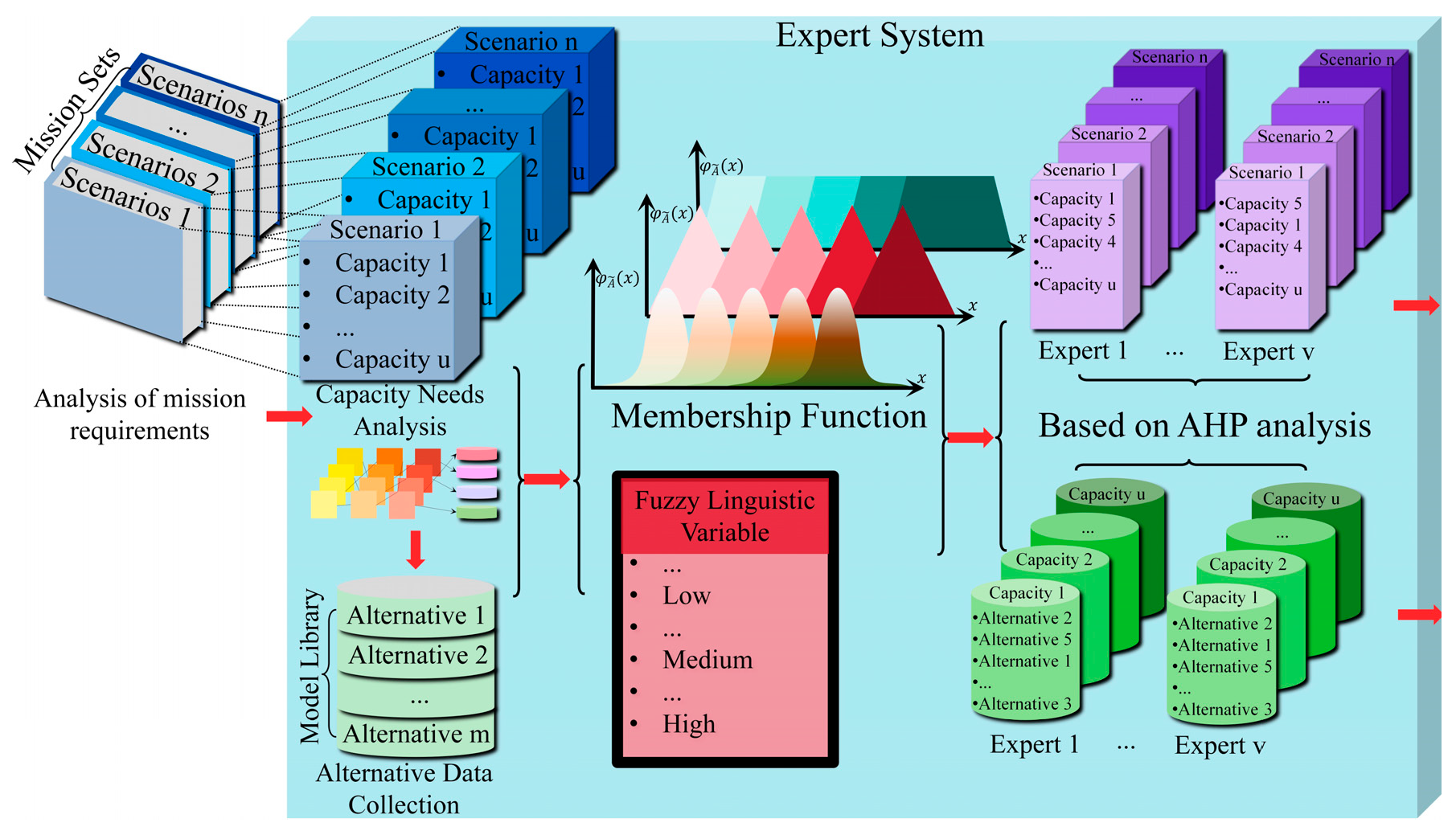
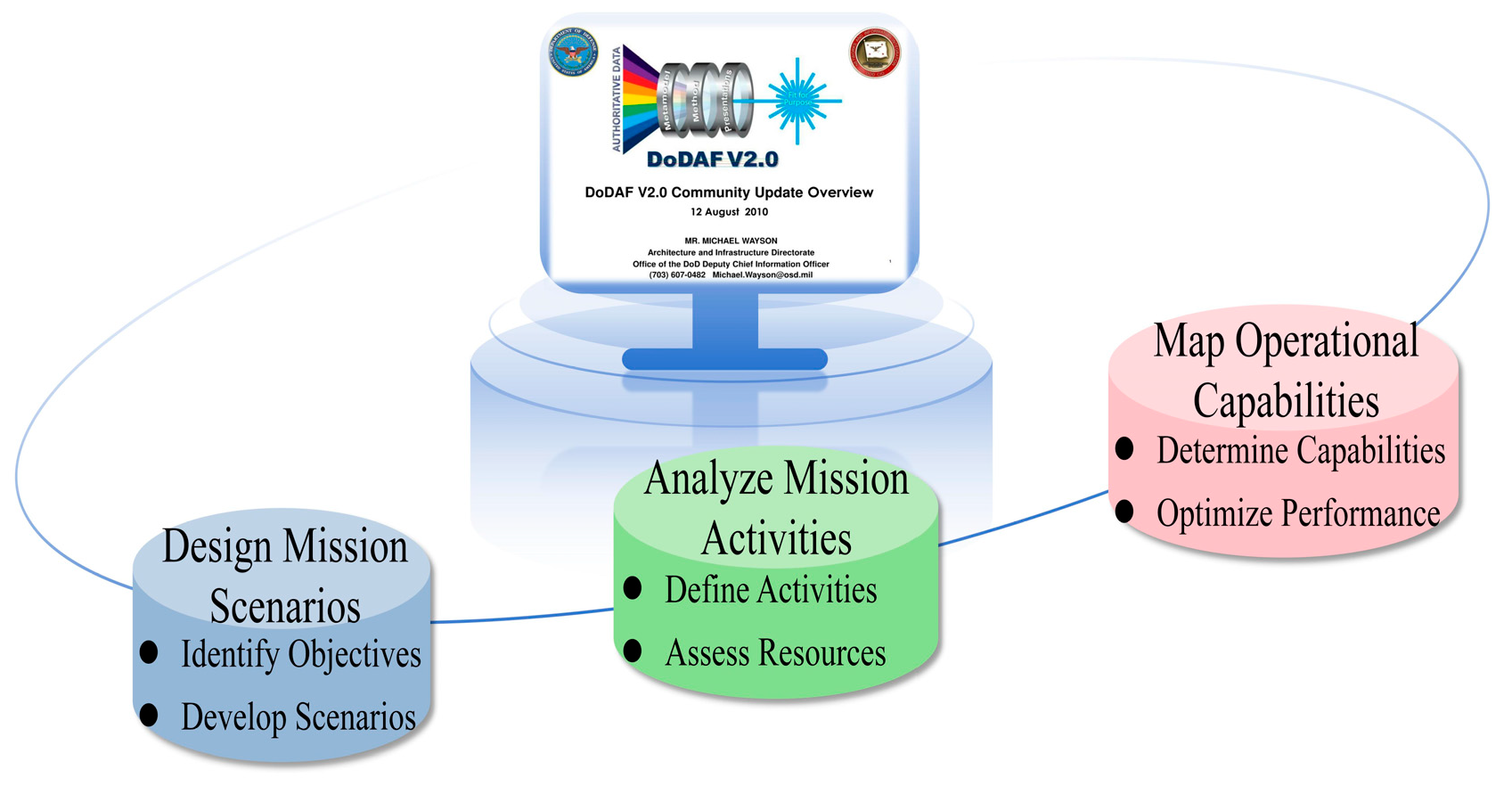
2.2. Decision Support System
2.3. Mission Scenarios and Performance Indicators
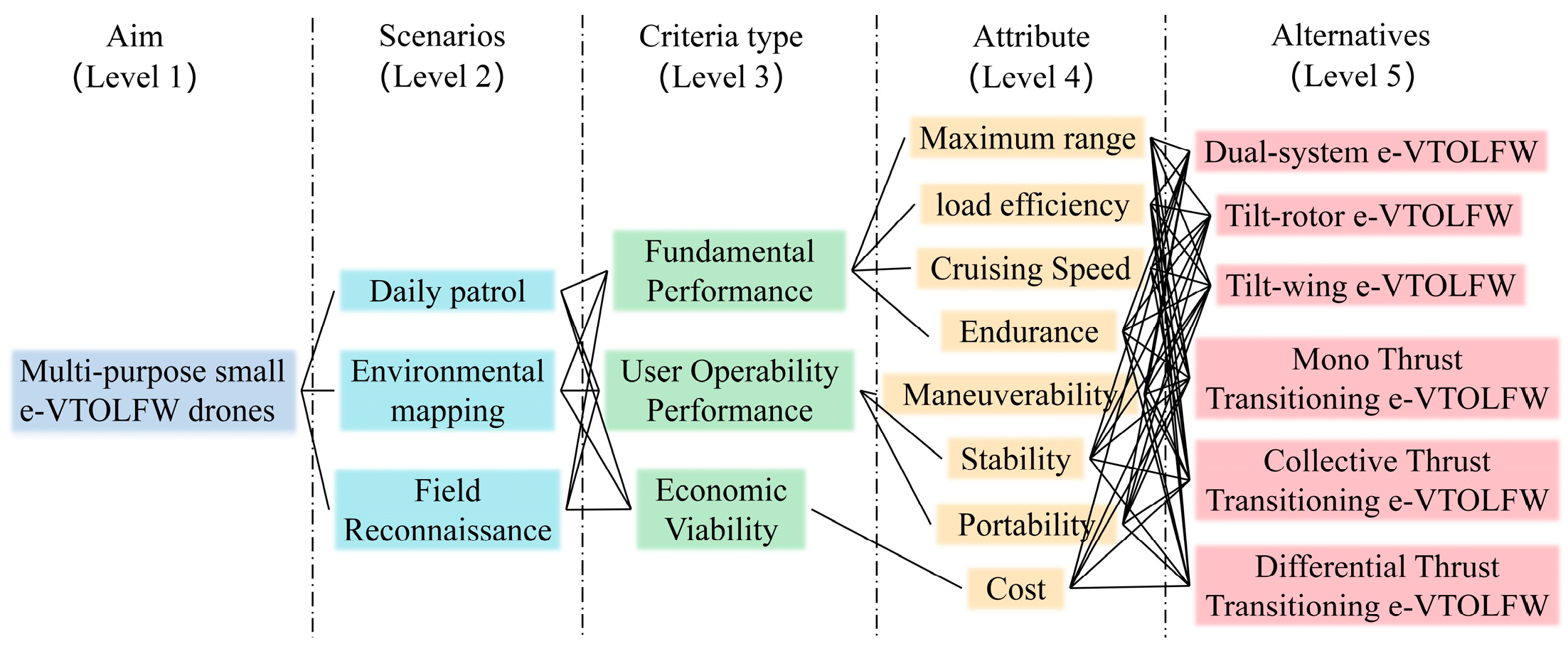
2.3.1. Identifying Criteria for Mission-Based Assessment of Drones
2.3.2. Mission Scenario
- Scenario 1 (Urban Patrol)
- 2.
- Scenario 2 (Environmental Mapping)
- 3.
- Scenario 3 (Wide-Area Reconnaissance)
2.3.3. Performance Indicators
- Fundamental Performance
- 2.
- User Operability
- 3.
- Economic Viability
2.4. The PHFs-MADM Approach
2.4.1. Modeling Framework and Process Content
2.4.2. Fusion and Defuzzification of Fuzzy Information Based on PHFs
- Fuzzy Information Fusion
- 2.
- Fusion Information Defuzzification
2.4.3. Normalization Method
2.4.4. MADM Algorithm Model
- Step 1: Construct the initial evaluation matrix.
- 2.
- Step 2: Standardize the evaluation matrix.
- 3.
- Step 3: Compute the value of each alternative solution.
3. Numerical Case Study
3.1. Case Study
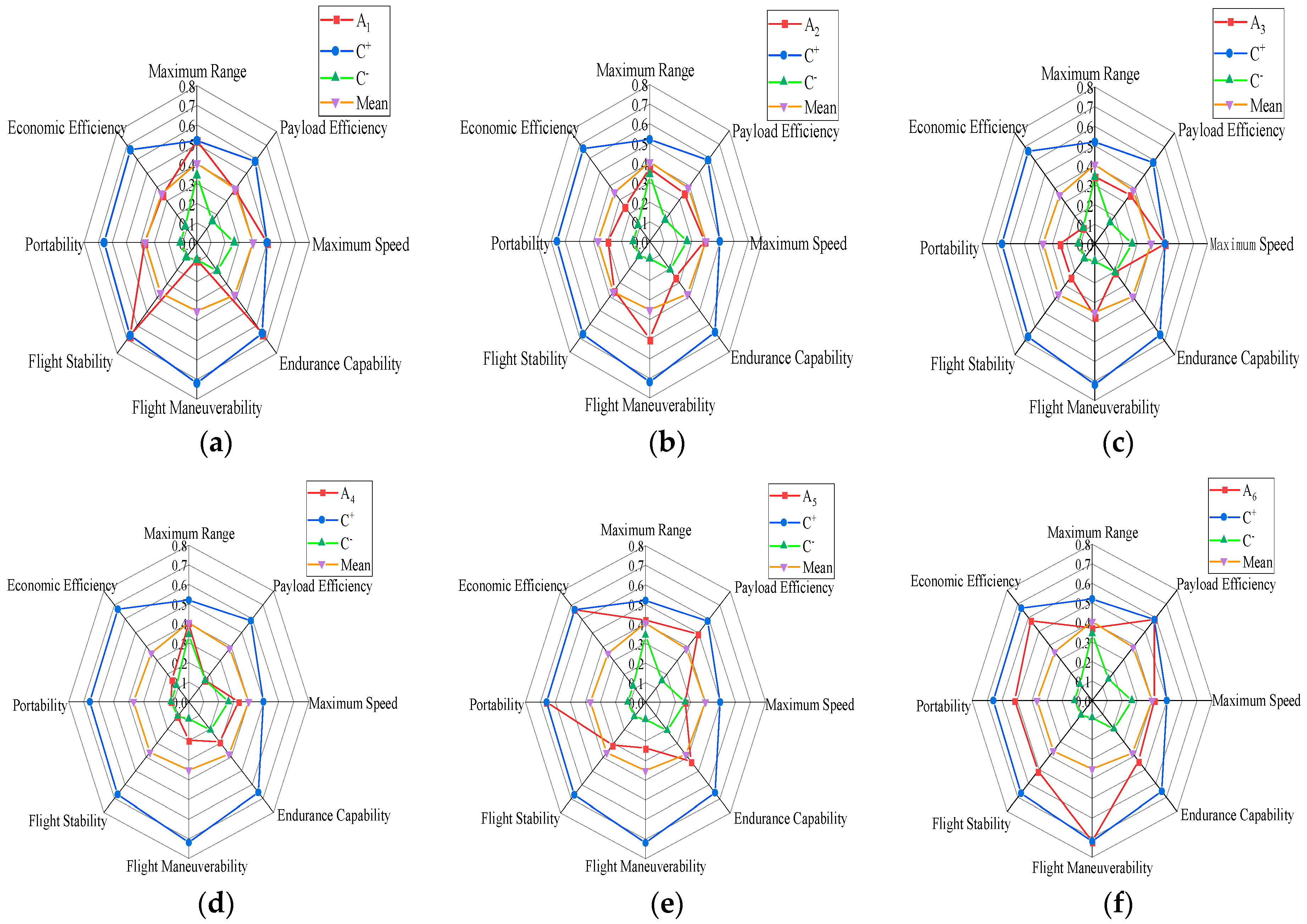
3.2. Calculation of Alternative Index Values
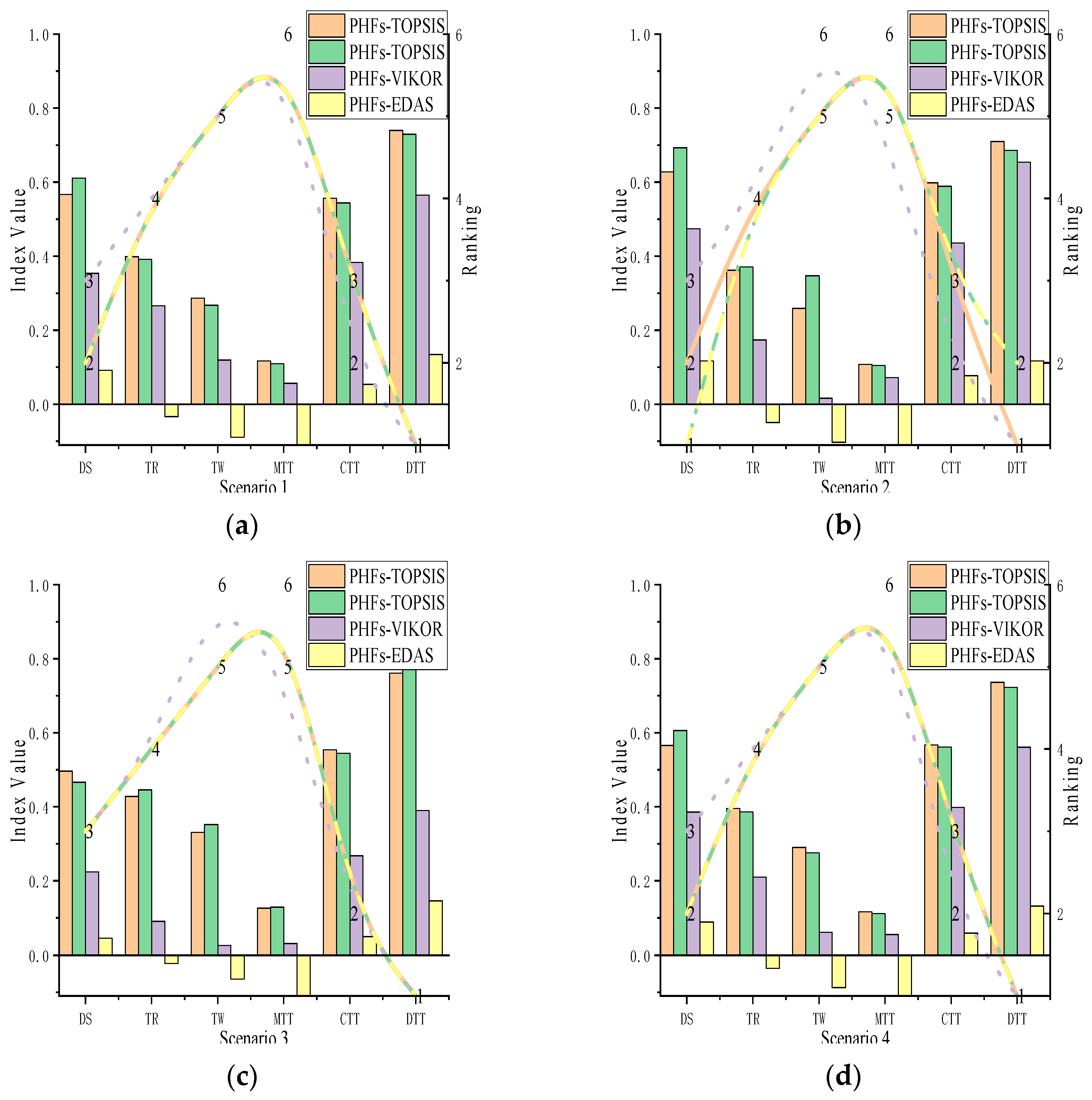
3.3. Method Verification
3.3.1. Procedures
3.3.2. Results and Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Nomenclature

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviations | Full Forms |
|---|---|
| AHP | Analytic hierarchy process |
| ANP | Analytic network process |
| SAW | Simple additive weighting |
| TOPSIS | Technique for order of preference by similarity to ideal solution |
| VIKOR | VIseKrite-rijumska optimizacija I kompromisno resenje |
| ELECTRE | Elimination et choix traduisant la realité |
| PROMETHEE | Preference ranking organization method for enrichment of evaluation |
| EDAS | Evaluation based on distance from average solution |
| IFGOWGA | Intuitionistic fuzzy generalized ordered weighted geometric average |
| BWM | Best worst method |
| MAGDM | Multi-attribute group decision making |
| PCA | Principal component analysis |
| HC | Hierarchical clustering |
| CPT | Cumulative prospect theory |
| QFD | Quality function deployment |
| DEMATEL | Decision-making trial and evaluation laboratory |
| ISM | Interpretive structural modeling |
| CODAS | Combinative distance-based assessment |
Appendix B. MADM Method
| MTOPSIS | TOPSIS | VIKOR | EDAS |
|---|---|---|---|
References
- Worm, A.; Jenvald, J.; Morin, M. Mission efficiency analysis: Evaluating and improving tactical mission performance in high-risk, time-critical operations. Saf. Sci. 1998, 30, 79–98. [Google Scholar] [CrossRef]
- Lie, C.H.; Kuo, W.; Tillman, F.A.; Hwang, C.L. Mission efficiency model for a system with several mission types. IEEE Trans. Reliab. 1984, 33, 346–352. [Google Scholar] [CrossRef]
- Borky, J.M.; Bradley, T.H. Effective Model-Based Systems Engineering; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Cross, N. Design Thinking: Understanding How Designers Think and Work; Bloomsbury Publishing: London, UK, 2023. [Google Scholar]
- Zhang, J.; Fang, Z.; Dong, W.; Liu, S.; Chen, D. A mission success probability assessment framework for phased-mission-systems using extended graphical evaluation and review technique. Reliab. Eng. Syst. Saf. 2024, 249, 110248. [Google Scholar] [CrossRef]
- Yun, Q.; Song, B.; Pei, Y. Modeling the impact of high energy laser weapon on the mission efficiency of unmanned combat aerial vehicles. IEEE Access 2020, 8, 32246–32257. [Google Scholar] [CrossRef]
- Seethaler, J.; Strohal, M.; Stütz, P. Finding Metrics for Combat Aircraft Mission Efficiency: An AHP-Based Approach; Deutsche Gesellschaft für Luft-und Raumfahrt-Lilienthal-Oberth eV: Bonn, Germany, 2021. [Google Scholar]
- Chen, Z.; Zhong, P.; Liu, M.; Ma, Q.; Si, G. A novel integrated MADM method for design concept evaluation. Sci. Rep. 2022, 12, 15885. [Google Scholar] [CrossRef]
- Ying, C.; Li, Y.L.; Chin, K.S.; Yang, H.-T.; Xu, J. A new product development concept selection approach based on cumulative prospect theory and hybrid-information MADM. Comput. Ind. Eng. 2018, 122, 251–261. [Google Scholar] [CrossRef]
- Ishizaka, A.; Siraj, S. Are multi-criteria decision-making tools useful? An experimental comparative study of three methods. Eur. J. Oper. Res. 2018, 264, 462–471. [Google Scholar] [CrossRef]
- Asadabadi, M.R.; Chang, E.; Saberi, M. Are MCDM methods useful? A critical review of analytic hierarchy process (AHP) and analytic network process (ANP). Cogent Eng. 2019, 6, 1623153. [Google Scholar] [CrossRef]
- Grošelj, P.; Dolinar, G. Group AHP framework based on geometric standard deviation and interval group pairwise comparisons. Inf. Sci. 2023, 626, 370–389. [Google Scholar] [CrossRef]
- Aminudin, N.; Huda, M.; Kilani, A.; Embong, W.H.W.; Mohamed, A.M.; Basiron, B.; Ihwani, S.S.; Noor, S.S.M.; Jasmi, K.A.; Safar, J.; et al. Higher education selection using simple additive weighting. Int. J. Eng. Technol. 2018, 7, 211–217. [Google Scholar] [CrossRef]
- Zyoud, S.H.; Fuchs-Hanusch, D. A bibliometric-based survey on AHP and TOPSIS techniques. Expert Syst. Appl. 2017, 78, 158–181. [Google Scholar] [CrossRef]
- Zamani-Sabzi, H.; King, J.P.; Gard, C.C.; Abudu, S. Statistical and analytical comparison of multi-criteria decision-making techniques under fuzzy environment. Oper. Res. Perspect. 2016, 3, 92–117. [Google Scholar] [CrossRef]
- Danesh, D.; Ryan, M.; Abbasi, A. A systematic comparison of multi-criteria decision making methods for the improvement of project portfolio management in complex organisations. Int. J. Manag. Decis. Mak. 2017, 16, 280–320. [Google Scholar] [CrossRef]
- Baghla, S.; Bansal, S. Effect of normalization techniques in VIKOR method for network selection in heterogeneous networks. In Proceedings of the 2014 IEEE International Conference on Computational Intelligence and Computing Research, Coimbatore, India, 18–20 December 2014; pp. 1–6. [Google Scholar]
- Selmi, M.; Kormi, T.; Ali, N.B.H. Comparison of multi-criteria decision methods through a ranking stability index. Int. J. Oper. Res. 2016, 27, 165–183. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, H.; Wei, G.; Wei, Y.; Wei, C. Evaluation based on distance from average solution method for multiple criteria group decision making under picture 2-tuple linguistic environment. Mathematics 2019, 7, 243. [Google Scholar] [CrossRef]
- Pollet, F.; Budinger, M.; Delbecq, S.; Moschetta, J.-M.; Liscouët, J. Quantifying and mitigating uncertainties in design optimization including off-the-shelf components: Application to an electric multirotor UAV. Aerosp. Sci. Technol. 2023, 136, 108179. [Google Scholar] [CrossRef]
- Markatos, D.N.; Pantelakis, S.G. Implementation of a Holistic MCDM-Based Approach to Assess and Compare Aircraft, under the Prism of Sustainable Aviation. Aerospace 2023, 10, 240. [Google Scholar] [CrossRef]
- Chi, P.; An, L.; Zheng, L.; Wu, K.; Zhao, J.; Wang, Y. An Evaluation Model of UAV Autonomous Capability Based on Cloud Model and AHP. In Proceedings of the International Conference on Guidance, Navigation and Control, Harbin, China, 5–7 August 2022; Springer: Singapore, 2022; pp. 1849–1859. [Google Scholar]
- Chitale, Y.H.; Justin, C.Y.; Mavris, D.N. Parametric Design, Manufacturing and Simulation of On-Demand Fixed Wing UAVs. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15 & 19–21 January 2021; p. 0624. [Google Scholar]
- Dožić, S.; Kalić, M. Comparison of two MCDM methodologies in aircraft type selection problem. Transp. Res. Procedia 2015, 10, 910–919. [Google Scholar] [CrossRef]
- Dožić, S.; Lutovac, T.; Kalić, M. Fuzzy AHP approach to passenger aircraft type selection. J. Air Transp. Manag. 2018, 68, 165–175. [Google Scholar] [CrossRef]
- Bruno, G.; Esposito, E.; Genovese, A. A model for aircraft evaluation to support strategic decisions. Expert Syst. Appl. 2015, 42, 5580–5590. [Google Scholar] [CrossRef]
- Dožić, S. Multi-criteria decision making methods: Application in the aviation industry. J. Air Transp. Manag. 2019, 79, 101683. [Google Scholar] [CrossRef]
- Ma, J. Training Aircraft Selection of the Vietnam People’s Air Force Using a Hybrid BWM-Fuzzy TOPSIS Method. Period. Polytech. Soc. Manag. Sci. 2022, 30, 141–157. [Google Scholar] [CrossRef]
- Rasaizadi, A.; Ardestani, A.; Nahavandi, N. Airplane Selection to Renovate Air Transportation System: A Multi-Criteria Decision-Making Problem. Adv. Res. Civ. Eng. 2021, 3, 61–75. [Google Scholar]
- Markatos, D.N.; Malefaki, S.; Pantelakis, S.G. Sensitivity Analysis of a Hybrid MCDM Model for Sustainability Assessment—An Example from the Aviation Industry. Aerospace 2023, 10, 385. [Google Scholar] [CrossRef]
- Liu, H.; Tu, J.; Sun, C. Improved possibility degree method for intuitionistic fuzzy multi-attribute decision making and application in aircraft cockpit display ergonomic evaluation. IEEE Access 2020, 8, 202540–202554. [Google Scholar] [CrossRef]
- Dahooie, J.H.; Mohammadi, N.; Daim, T.; Vanaki, A.S.; Zavadskas, E.K. Matching of technological forecasting technique to a technology using fuzzy multi-attribute decision-making methods: Case study from the aerospace industry. Technol. Soc. 2021, 67, 101707. [Google Scholar] [CrossRef]
- Xiong, S.H.; Chen, Z.S.; Chiclana, F.; Chin, K.; Skibniewski, M.J. Proportional hesitant 2-tuple linguistic distance measurements and extended VIKOR method: Case study of evaluation and selection of green airport plans. Int. J. Intell. Syst. 2022, 37, 4113–4162. [Google Scholar] [CrossRef]
- AlKheder, S.; AlKandari, D.; AlYatama, S. Sustainable assessment criteria for airport runway material selection: A fuzzy analytical hierarchy approach. Eng. Constr. Archit. Manag. 2022, 29, 3091–3113. [Google Scholar] [CrossRef]
- Canumalla, R.; Jayaraman, T.V. Decision Science-Driven Assessment of Ti Alloys for Aircraft Landing Gear Beams. Aerospace 2024, 11, 51. [Google Scholar] [CrossRef]
- Zhang, Y.; Cai, Q.; Wei, G.; Chen, X. Model for evaluating the airline business operations capability based on 2TLPF-TOPSIS method and entropy weight. J. Intell. Fuzzy Syst. 2023, 44, 5745–5758. [Google Scholar] [CrossRef]
- Deveci, M.; Rodríguez, R.M.; Labella, Á.; Ciftci, M.E. A decision support system for reducing the strategic risk in the schedule building process for network carrier airline operations. Ann. Oper. Res. 2022, 1–37. [Google Scholar] [CrossRef]
- Kaya, S.K.; Erginel, N. Futuristic airport: A sustainable airport design by integrating hesitant fuzzy SWARA and hesitant fuzzy sustainable quality function deployment. J. Clean. Prod. 2020, 275, 123880. [Google Scholar] [CrossRef]
- Ahmad, F.; Al Awadh, M.; Sahar, N. Optimum alternate material selection methodology for an aircraft skin. Chin. J. Aeronaut. 2023, 36, 476–488. [Google Scholar] [CrossRef]
- Liou, J.J.H.; Chien, C.W.; Gudiel Pineda, P.J.; Li, C.-S.J.; Hsu, C.-C. Exploring the Impact of Pandemic Measures on Airport Performance. Aerospace 2024, 11, 373. [Google Scholar] [CrossRef]
- Todorov, V.T.; Rakov, D.; Bardenhagen, A. Enhancement opportunities for conceptual design in aerospace based on the advanced morphological approach. Aerospace 2022, 9, 78. [Google Scholar] [CrossRef]
- Khan, S.A.; Liaqat, H.; Akram, F.; Khan, H.A. Development of a design space for dissimilar materials joining in aerospace applications. Aeronaut. J. 2024, 128, 1284–1301. [Google Scholar]
- Gül, A.Y.; Cakmak, E.; Karakas, A.E. Drone Selection for Forest Surveillance and Fire Detection Using Interval Valued Neutrosophic Edas Method. Facta Univ. Ser. Mech. Eng. 2024. [Google Scholar] [CrossRef]
- Zhang, Y.; Zeng, Y.; Cao, K. Commonality Evaluation and Prediction Study of Light and Small Multi-Rotor UAVs. Drones 2023, 7, 698. [Google Scholar] [CrossRef]
- Ozdemir, U.; Aktas, Y.O.; Vuruskan, A.; Dereli, Y.; Tarhan, A.F.; Demirbag, K.; Erdem, A.; Kalaycioglu, G.D.; Ozkol, I.; Inalhan, G. Design of a commercial hybrid VTOL UAV system. J. Intell. Robot. Syst. 2014, 74, 371–393. [Google Scholar] [CrossRef]
- Kontogiannis, S.G.; Ekaterinaris, J.A. Design, performance evaluation and optimization of a UAV. Aerosp. Sci. Technol. 2013, 29, 339–350. [Google Scholar] [CrossRef]
- Mohanty, P.P.; Mahapatra, S.S.; Mohanty, A. A novel multi-attribute decision making approach for selection of appropriate product conforming ergonomic considerations. Oper. Res. Perspect. 2018, 5, 82–93. [Google Scholar] [CrossRef]
- Ramirez-Atencia, C.; Rodriguez-Fernandez, V.; Camacho, D. A revision on multi-criteria decision making methods for multi-UAV mission planning support. Expert Syst. Appl. 2020, 160, 113708. [Google Scholar] [CrossRef]
- Fikar, C.; Gronalt, M.; Hirsch, P. A decision support system for coordinated disaster relief distribution. Expert Syst. Appl. 2016, 57, 104–116. [Google Scholar] [CrossRef]
- Shi, X.; Han, W.; Zhao, T.; Tang, J. Decision support system for variable rate irrigation based on UAV multispectral remote sensing. Sensors 2019, 19, 2880. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Cao, Y.; Ding, M.; Wang, X.; Yu, W.; Guo, B. Research Progress in Modeling and Evaluation of Cooperative Operation System-of-systems for Manned-unmanned Aerial Vehicles. IEEE Aerosp. Electron. Syst. Mag. 2023, 39, 6–31. [Google Scholar] [CrossRef]
- DoDAF Architecture Framework Version 2.02. US. Department of Defense. Available online: https://dodcio.defense.gov/Library/DoD-Architecture-Framework/ (accessed on 26 June 2024).
- Aghamohammadpour, A.; Mahdipour, E.; Attarzadeh, I. Architecting threat hunting system based on the DODAF framework. J. Supercomput. 2023, 79, 4215–4242. [Google Scholar] [CrossRef]
- Barrios, M.; Guilera, G.; Nuño, L.; Gómez-Benito, J. Consensus in the delphi method: What makes a decision change? Technol. Forecast. Soc. Chang. 2021, 163, 120484. [Google Scholar] [CrossRef]
- Zeshui, X.; Lina, W. Research status and prospect of linguistic modifier sets. Control. Decis. Mak. 2022, 37, 1–13. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, S. A review of probabilistic hesitant fuzzy decision theory and methods. Control. Decis. Mak. 2021, 36. [Google Scholar] [CrossRef]
- Dubois, D.; Prade, H. Fuzzy sets in approximate reasoning, Part 1, Inference with possibility distributions. Fuzzy Sets Syst. 1991, 40, 143–202. [Google Scholar] [CrossRef]
- Dong, J.; Wan, S.; Chen, S.M. Fuzzy best-worst method based on triangular fuzzy numbers for multi-criteria decision-making. Inf. Sci. 2021, 547, 1080–1104. [Google Scholar] [CrossRef]
- Pałczyński, K.; Czyżewska, M.; Talaśka, T. Fuzzy Gaussian Decision Tree. J. Comput. Appl. Math. 2023, 425, 115038. [Google Scholar] [CrossRef]
- Wang, Y.M.; Luo, Y. Integration of correlations with standard deviations for determining attribute weights in multiple attribute decision making. Math. Comput. Model. 2010, 51, 1–12. [Google Scholar] [CrossRef]
- Zavadskas, E.K.; Turskis, Z. A new logarithmic normalization method in games theory. Informatica 2008, 19, 303–314. [Google Scholar] [CrossRef]
- Saeed, A.S.; Younes, A.B.; Cai, C.; Cai, G. A survey of hybrid unmanned aerial vehicles. Prog. Aerosp. Sci. 2018, 98, 91–105. [Google Scholar] [CrossRef]
- JDYair. Available online: https://www.feiyantech.com/article/1149.html (accessed on 12 April 2024).
- Gebril, A.A.; Kamal, A.M. Design and analysis of an electric tiltrotor unmanned aerial vehicle. J. Phys. Conf. Series. IOP Publ. 2023, 2616, 012008. [Google Scholar] [CrossRef]
- Liu, Z.; He, Y.; Yang, L.; Han, J. Control techniques of tilt rotor unmanned aerial vehicle systems: A review. Chin. J. Aeronaut. 2017, 30, 135–148. [Google Scholar] [CrossRef]
- Daud Filho, A.C.; Belo, E.M. A tilt-wing VTOL UAV configuration: Flight dynamics modelling and transition control simulation. Aeronaut. J. 2024, 128, 152–177. [Google Scholar] [CrossRef]
- Jung, Y.; Shim, D.H. Development and application of controller for transition flight of tail-sitter UAV. J. Intell. Robot. Syst. 2012, 65, 137–152. [Google Scholar] [CrossRef]
- Beach, J.M.; Argyle, M.E.; McLain, T.W.; Beard, R.W.; Morris, S. Tailsitter attitude control using resolved tilt-twist. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 768–779. [Google Scholar]
- Cheng, Z.; Pei, H.; Li, S. Neural-networks control for hover to high-speed-level-flight transition of ducted fan uav with provable stability. IEEE Access 2020, 8, 100135–100151. [Google Scholar] [CrossRef]
- Wingtraone. Available online: https://wingtra.com/mapping-drone-wingtraone (accessed on 12 April 2024).
- Hequav Technology. Available online: https://www.hequavtech.com/product_center/112.html (accessed on 12 April 2024).
- Hequav Technology. Available online: https://www.hequavtech.com/product_center/145.html (accessed on 12 April 2024).
- Cheng, Z.; Hailong, P.E.I. A corridor-based flight mode transition strategy for agile ducted-fan tail-sitter UAV: Altitude-hold transition. Chin. J. Aeronaut. 2023, 36, 330–345. [Google Scholar] [CrossRef]
- Ducard, G.J.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhao, H.; Liu, Y. An evaluative review of the VTOL technologies for unmanned and manned aerial vehicles. Comput. Commun. 2020, 149, 356–369. [Google Scholar] [CrossRef]
- Lee, C.; Kim, S.; Chu, B. A survey: Flight mechanism and mechanical structure of the UAV. Int. J. Precis. Eng. Manuf. 2021, 22, 719–743. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Idrissi, M.; Salami, M.; Annaz, F. A review of quadrotor unmanned aerial vehicles: Applications, architectural design and control algorithms. J. Intell. Robot. Syst. 2022, 104, 22. [Google Scholar] [CrossRef]
- Humphrey-Murto, S.; De Wit, M. The Delphi method—More research please. J. Clin. Epidemiol. 2019, 106, 136–139. [Google Scholar] [CrossRef] [PubMed]
- Pamučar, D.; Stević, Ž.; Sremac, S. A new model for determining weight coefficients of criteria in mcdm models: Full consistency method (fucom). Symmetry 2018, 10, 393. [Google Scholar] [CrossRef]
- Kwok, P.K.; Lau, H.Y.K. Hotel selection using a modified TOPSIS-based decision support algorithm. Decis. Support Syst. 2019, 120, 95–105. [Google Scholar] [CrossRef]
- Mardani, A.; Zavadskas, E.K.; Govindan, K.; Senin, A.A.; Jusoh, A. VIKOR technique: A systematic review of the state of the art literature on methodologies and applications. Sustainability 2016, 8, 37. [Google Scholar] [CrossRef]


| Algorithm | User Consideration | Complexity | Flexibility | Reliability | Extendibility |
|---|---|---|---|---|---|
| AHP [10,11,12,14] | High | Medium | High | High | Medium |
| Merits: Flexibility in problem structuring, handles qualitative and quantitative data, and straightforward comparisons | |||||
| Demerits: Requires many comparisons for complex problems, and subjective judgments can lead to inconsistency | |||||
| ANP [11,12] | High | High | High | Medium | Medium |
| Merits: Handles internal and external dependencies in a network and flexible for complex decisions | |||||
| Demerits: Complex computation and requires expertise for model construction and analysis | |||||
| SAW [13,15] | Medium | Low | Medium | Medium | Low |
| Merits: Simple and easy to use, and effective for ranking and selection among limited alternatives | |||||
| Demerits: Limited to problems with clear criteria and may not handle interdependent relationships well | |||||
| TOPSIS [14,15] | Medium | Medium | Medium | High | High |
| Merits: Effective in various applications and provides a solution close to the ideal case | |||||
| Demerits: Can be sensitive to the normalization method used and may be biased if weights are not assigned properly | |||||
| VIKOR [15,16,17] | Medium | Medium | Medium | High | High |
| Merits: Provides a compromise solution and is useful for conflicting criteria | |||||
| Demerits: Can be complex to interpret and may become complex with many criteria or alternatives | |||||
| ELECTRE [15] | High | High | Medium | Medium | Medium |
| Merits: Handles conflicting criteria without commensurability and effective for complex decisions | |||||
| Demerits: Complex methodology, requires expert knowledge, and computationally intensive for large alternatives | |||||
| PROMETHEE [16,18] | High | Medium | High | Medium | Medium |
| Merits: Handles quantitative and qualitative data, and supports decisions under uncertainty | |||||
| Demerits: Complex application and substantial effort to determine preferences and weights | |||||
| EDAS [19] | Medium | Medium | Medium | High | High |
| Merits: Useful in performance measurement and productivity analysis, and no need for a priori weights | |||||
| Demerits: The accuracy of rankings heavily relies on the accurate assignment of weights | |||||
| Author | Objective | Theme | Methods Used |
|---|---|---|---|
| Ma, J. (2022) [28] | Selection of aircraft to meet training needs | Ranking | BWM, Fuzzy TOPSIS, and AHP |
| Rasaizadi, A. et al. (2021) [29] | Investigation of aircraft to meet air transportation needs | Evaluation | AHP, SAW, TOPSIS, and ELECTRE |
| Markatos, D. et al. (2023) [30] | Selection of sustainable materials | Evaluation | AHP and WSM |
| Liu, H. et al. (2020) [31] | Cockpit displaying ergonomic evaluation | Evaluation | IFGOWGA |
| Dahooie, J.H. et al. (2021) [32] | Selecting an appropriate forecasting method for aircraft engine | Ranking | SWARA and MUTLIMOORA |
| Xiong, S.H. et al. (2021) [33] | Selection of green airport plans | Evaluation | MAGDM |
| AlKheder, S. et al. (2022) [34] | Airport runway material selection | Evaluation | Fuzzy AHP |
| Canumalla, R. et al. (2024) [35] | Landing gear material evaluation | Evaluation | PCA and HC |
| Zhang, Y. et al. (2023) [36] | Evaluation of airline business operations | Evaluation | CPT and TOPSIS |
| Deveci, M. et al. (2022) [37] | Evaluation of airline route schedules | Evaluation | BWM and TOPSIS |
| Kaya, S.K. et al. (2020) [38] | A sustainable airport design | Ranking | QFD |
| Ahmad, F. et al. (2023) [39] | Selection methodology for an aircraft skin | Ranking | Ashby |
| Liou, J.J.H. et al. (2024) [40] | Exploring the impact of pandemic measures on airport performance | Evaluation | DEMATEL |
| Todorov, V.T. et al. (2022) [41] | Conceptual design | Evaluation | Fuzzy AHP |
| Khan, S.A. et al. (2024) [42] | Selection of dissimilar joining materials | Ranking | QFD and TOPSIS |
| Gül, A.Y. et al. (2024) [43] | Drone selection for forest and fire detection | Evaluation | TOPSIS and CODAS |
| Attribute | Instructions |
|---|---|
| It is defined as the drone’s ability to achieve the longest distance while carrying a mission payload, with no consideration given to communication constraints. | |
| It is defined as the ratio of the drone’s mission payload to its maximum takeoff weight, indicating its payload carriage capacity under strict size and weight limitations. | |
| It is defined as the highest speed achievable by a drone during flight without compromising its structural integrity and safety regulations. | |
| It is defined as the drone’s capacity for sustained operation with a mission payload. | |
| It is defined as a rapid transition between rotor and fixed-wing modes during flight, a minimal turn radius, and executing specific aerial maneuvers. | |
| It is defined as the drone’s capacity to resist external disturbances, such as airflow disruptions and stall resistance, in rotor mode, fixed-wing modes, and during mode transitions. | |
| It is defined as the drone’s capacity to be transported by an individual during mission execution. | |
| It is defined as the total cost associated with the drone’s entire lifespan, with no consideration cost of software design (e.g., controller design) |
| Scale | Fuzzy Value |
|---|---|
| Ultra-low (UL) | (0, 0, 0.1) |
| Low (L) | (0, 0.1, 0.3) |
| Middle–low (ML) | (0.1, 0.3, 0.5) |
| Middle (M) | (0.3, 0.5, 0.7) |
| Middle–high (MH) | (0.5, 0.7, 0.9) |
| High (H) | (0.7, 0.9, 1.0) |
| Ultra-high (UH) | (0.9, 1.0, 1.0) |
| Type | Maximum Range (km) | Payload Efficiency | Maximum Speed (km/h) | Endurance Capability (min) | Maximum Weight (kg) | Payload (kg) |
|---|---|---|---|---|---|---|
| DS | 70 | 0.167 | 108 | 90 | 12 | 2 |
| TR | 50 | 0.152 | 84.6 | 35.5 | 22.992 | 3.5 |
| TW | 46.16 | 0.155 | 108 | 28.14 | 6.44 | 1 |
| MTT | 54 | 0.068 | 72 | 40 | 18 | 1.22 |
| CTT | 56.6 | 0.216 | 57.6 | 59 | 3.7 | 0.8 |
| DTT | 40 | 0.257 | 90 | 60 | 1.75 | 0.45 |
| Type | Performance |
|---|---|
| DS | Merits: Maneuverability and stability, easy takeoff and landing, and simple transition mechanism Demerits: Extra unnecessary weight, low mode transition efficiency, and costlier maintenance |
| TR | Merits: Maneuverability and stability, easy takeoff and landing, and simple transition mechanism Demerits: Complex tilting mechanism, extra unnecessary weight, low mode transition efficiency, and costlier maintenance |
| TW | Merits: Good aerodynamic performance, and easy takeoff and landing. Demerits: Vulnerable to crosswinds, complex wing-tilting mechanism, extra unnecessary weight, low mode transition efficiency, and costlier maintenance |
| MTT | Merits: No extra actuators, easy takeoff and landing, and high mode transition efficiency Demerits: Vertical flight instability, lower payload and speed, vulnerable to crosswinds, complex power mechanism, high angle of attack transitions, and costlier maintenance |
| CTT | Merits: No extra actuators, easy takeoff and landing, and high mode transition efficiency Demerits: Vertical flight instability, vulnerable to crosswinds, and high angle of attack transitions |
| DTT | Merits: No extra actuators, agile maneuvering, high mode transition efficiency, and easy takeoff and landing Demerits: Horizontal flight efficiency reduced, vulnerable to crosswinds, and high angle of attack transitions |
| DMs | Scenario | Attribute Criteria | |||||||
|---|---|---|---|---|---|---|---|---|---|
| B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | ||
| DM1 | 1 | H | L | H | H | M | H | MH | M |
| 2 | UH | MH | L | H | ML | H | H | L | |
| 3 | M | H | H | M | UH | M | H | M | |
| DM2 | 1 | MH | M | M | M | M | H | ML | MH |
| 2 | H | M | ML | M | L | H | MH | M | |
| 3 | MH | M | MH | M | H | M | H | MH | |
| DM3 | 1 | MH | H | L | M | ML | H | ML | M |
| 2 | H | MH | L | UH | L | UH | MH | M | |
| 3 | M | H | UH | MH | UH | MH | H | M | |
| DM4 | 1 | MH | M | M | M | M | H | M | H |
| 2 | H | MH | ML | H | L | H | MH | M | |
| 3 | MH | H | MH | H | MH | M | H | M | |
| DM5 | 1 | M | M | M | M | M | H | ML | MH |
| 2 | MH | MH | ML | MH | ML | H | M | M | |
| 3 | M | MH | H | MH | H | M | H | ML | |
| DM6 | 1 | M | M | M | MH | M | H | ML | MH |
| 2 | MH | MH | L | MH | L | MH | M | M | |
| 3 | MH | H | H | MH | H | M | H | ML | |
| DMs | B5 | B6 | B7 | B8 | DMs | B5 | B6 | B7 | B8 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| DM1 | DS | H | L | H | H | DM4 | DS | L | UH | M | ML |
| TR | UH | MH | L | H | TR | M | M | ML | M | ||
| TW | M | H | H | M | TW | M | M | ML | L | ||
| MTT | MH | M | M | M | MTT | L | ML | L | L | ||
| CTT | H | M | ML | M | CTT | L | M | H | H | ||
| DTT | MH | M | MH | M | DTT | H | H | MH | MH | ||
| DM3 | DS | MH | H | L | M | DM5 | DS | MH | UH | M | ML |
| TR | H | MH | L | UH | TR | M | MH | M | M | ||
| TW | M | H | UH | MH | TW | M | M | M | ML | ||
| MTT | MH | M | M | M | MTT | ML | ML | ML | L | ||
| CTT | H | MH | ML | H | CTT | L | M | H | H | ||
| DTT | MH | H | MH | H | DTT | H | M | MH | MH | ||
| DM5 | DS | M | M | M | M | DM6 | DS | L | H | M | MH |
| TR | MH | MH | ML | MH | TR | M | ML | M | ML | ||
| TW | M | MH | H | MH | TW | ML | ML | ML | L | ||
| MTT | M | M | M | MH | MTT | L | UL | L | M | ||
| CTT | MH | MH | L | MH | CTT | ML | L | H | H | ||
| DTT | MH | H | H | MH | DTT | H | M | M | MH |
| Type | B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DS | 0.5196 | 1 | 0.3807 | 3 | 0.4977 | 1 | 0.6558 | 1 | 0.0881 | 6 | 0.6703 | 1 | 0.3707 | 3 | 0.3437 | 3 |
| TR | 0.3711 | 4 | 0.3465 | 5 | 0.3898 | 3 | 0.2586 | 5 | 0.4970 | 2 | 0.3546 | 3 | 0.2965 | 4 | 0.2492 | 4 |
| TW | 0.3426 | 5 | 0.3534 | 4 | 0.4977 | 1 | 0.2050 | 6 | 0.3691 | 3 | 0.2399 | 5 | 0.2471 | 5 | 0.1168 | 6 |
| MTT | 0.4008 | 3 | 0.1550 | 6 | 0.3318 | 4 | 0.2914 | 4 | 0.1965 | 5 | 0.1057 | 6 | 0.1175 | 6 | 0.1589 | 5 |
| CTT | 0.4201 | 2 | 0.4925 | 2 | 0.2654 | 5 | 0.4299 | 3 | 0.2343 | 4 | 0.3109 | 4 | 0.6588 | 1 | 0.6683 | 1 |
| DTT | 0.3711 | 4 | 0.5859 | 1 | 0.4147 | 2 | 0.4372 | 2 | 0.7178 | 1 | 0.5093 | 2 | 0.5153 | 2 | 0.5780 | 2 |
| B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | |
|---|---|---|---|---|---|---|---|---|
| Scenario 1 | 0.1421 | 0.1074 | 0.1074 | 0.1278 | 0.1003 | 0.1868 | 0.0859 | 0.1421 |
| Scenario 2 | 0.1760 | 0.1481 | 0.0455 | 0.1760 | 0.0395 | 0.1820 | 0.1400 | 0.0928 |
| Scenario 3 | 0.1067 | 0.1387 | 0.1480 | 0.1177 | 0.1564 | 0.0949 | 0.1547 | 0.0830 |
| Overall score | 0.1438 | 0.1265 | 0.0988 | 0.1395 | 0.0955 | 0.1642 | 0.1175 | 0.1141 |
| Type | PHFs-MTOPSIS | PHFs-TOPSIS | PHFs-VIKOR | PHFs-EDAS | ||||
|---|---|---|---|---|---|---|---|---|
| Index Value | Ranking | Index Value | Ranking | Index Value | Ranking | Index Value | Ranking | |
| Scenario 1 | ||||||||
| DS | 0.5672 | 2 | 0.6110 | 2 | 0.3538 | 3 | 0.0914 | 2 |
| TR | 0.3984 | 4 | 0.3916 | 4 | 0.2661 | 4 | −0.0335 | 4 |
| TW | 0.2867 | 5 | 0.2676 | 5 | 0.1196 | 5 | −0.0894 | 5 |
| MTT | 0.1169 | 6 | 0.1094 | 6 | 0.0568 | 6 | −0.1567 | 6 |
| CTT | 0.5564 | 3 | 0.5439 | 3 | 0.3832 | 2 | 0.0539 | 3 |
| DTT | 0.7397 | 1 | 0.7298 | 1 | 0.5653 | 1 | 0.1343 | 1 |
| Scenario 2 | ||||||||
| 0.6277 | 2 | 0.6929 | 1 | 0.4742 | 3 | 0.1174 | 1 | |
| 0.3622 | 4 | 0.3713 | 4 | 0.1737 | 4 | −0.0490 | 4 | |
| 0.2588 | 5 | 0.3470 | 5 | 0.0164 | 6 | −0.1027 | 5 | |
| 0.1076 | 6 | 0.1048 | 6 | 0.0720 | 5 | −0.1597 | 6 | |
| 0.5981 | 3 | 0.5890 | 3 | 0.4357 | 2 | 0.0770 | 3 | |
| 0.7097 | 1 | 0.6860 | 2 | 0.6541 | 1 | 0.1170 | 2 | |
| Scenario 3 | ||||||||
| 0.4962 | 3 | 0.4663 | 3 | 0.2241 | 3 | 0.0463 | 3 | |
| 0.4280 | 4 | 0.4459 | 4 | 0.0910 | 4 | −0.0223 | 4 | |
| 0.3311 | 5 | 0.3522 | 5 | 0.0265 | 6 | −0.0643 | 5 | |
| 0.1260 | 6 | 0.1291 | 6 | 0.0316 | 5 | −0.1562 | 6 | |
| 0.5539 | 2 | 0.5448 | 2 | 0.2675 | 2 | 0.0505 | 2 | |
| 0.7609 | 1 | 0.7723 | 1 | 0.3901 | 1 | 0.1460 | 1 | |
| Scenario 4 (Overall Score) | ||||||||
| DS | 0.5658 | 2 | 0.6059 | 2 | 0.3855 | 3 | 0.0886 | 2 |
| TR | 0.3956 | 4 | 0.3864 | 4 | 0.2101 | 4 | −0.0354 | 4 |
| TW | 0.2902 | 5 | 0.2759 | 5 | 0.0621 | 5 | −0.0874 | 5 |
| MTT | 0.1165 | 6 | 0.1116 | 6 | 0.0559 | 6 | −0.1574 | 6 |
| CTT | 0.5671 | 3 | 0.5615 | 3 | 0.3986 | 2 | 0.0598 | 3 |
| DTT | 0.7359 | 1 | 0.7224 | 1 | 0.560873 | 1 | 0.1319 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Z.; Zhang, B.; Tian, Z.; Zou, S.; Zhu, W. Implementing a Multi-Attribute Decision-Making-Based Approach to Evaluate Small Electric Vertical Takeoff and Landing Fixed-Wing Drones with Mission Efficiency. Aerospace 2024, 11, 568. https://doi.org/10.3390/aerospace11070568
Bai Z, Zhang B, Tian Z, Zou S, Zhu W. Implementing a Multi-Attribute Decision-Making-Based Approach to Evaluate Small Electric Vertical Takeoff and Landing Fixed-Wing Drones with Mission Efficiency. Aerospace. 2024; 11(7):568. https://doi.org/10.3390/aerospace11070568
Chicago/Turabian StyleBai, Zhuo, Bangchu Zhang, Zhong Tian, Shangnan Zou, and Weiyu Zhu. 2024. "Implementing a Multi-Attribute Decision-Making-Based Approach to Evaluate Small Electric Vertical Takeoff and Landing Fixed-Wing Drones with Mission Efficiency" Aerospace 11, no. 7: 568. https://doi.org/10.3390/aerospace11070568
APA StyleBai, Z., Zhang, B., Tian, Z., Zou, S., & Zhu, W. (2024). Implementing a Multi-Attribute Decision-Making-Based Approach to Evaluate Small Electric Vertical Takeoff and Landing Fixed-Wing Drones with Mission Efficiency. Aerospace, 11(7), 568. https://doi.org/10.3390/aerospace11070568