
Aircraft Wake Evolution Prediction Based on Parallel Hybrid Neural Network Model


Abstract
1. Introduction
- Deep learning neural networks are utilized to predict aircraft wake evolution, addressing the long computational times of numerical simulations.
- A hybrid deep learning neural network model with a parallel processing structure is proposed, extracting feature information from the time series of aircraft wake evolution.
- The characteristics of aircraft near-ground wake evolution are analyzed, providing theoretical value for enhancing airport operational efficiency.
2. Methodology
2.1. Aircraft Wake Vortex Numerical Simulation
2.1.1. Aircraft Wake Vortex Numerical Simulation Scenario Construction
2.1.2. Wake Vortex Tangential Velocity Model
2.1.3. Aircraft Wake Vortex CFD Numerical Simulation Method
2.2. Extraction of Aircraft Wake Evolution Characteristic Parameters
2.3. Correlation Analysis
2.4. Wake Parameter Prediction Model Based on PA-TLA
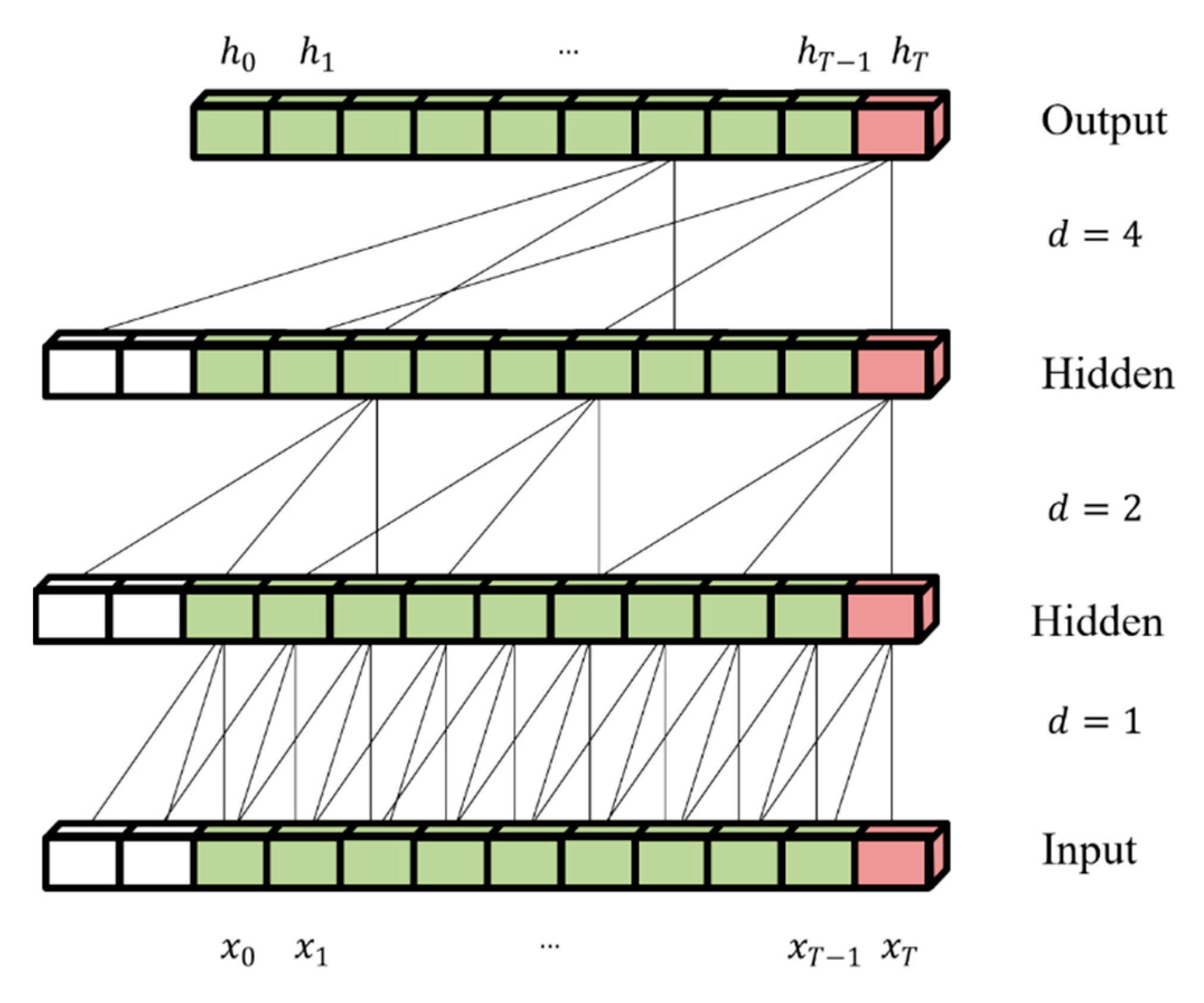
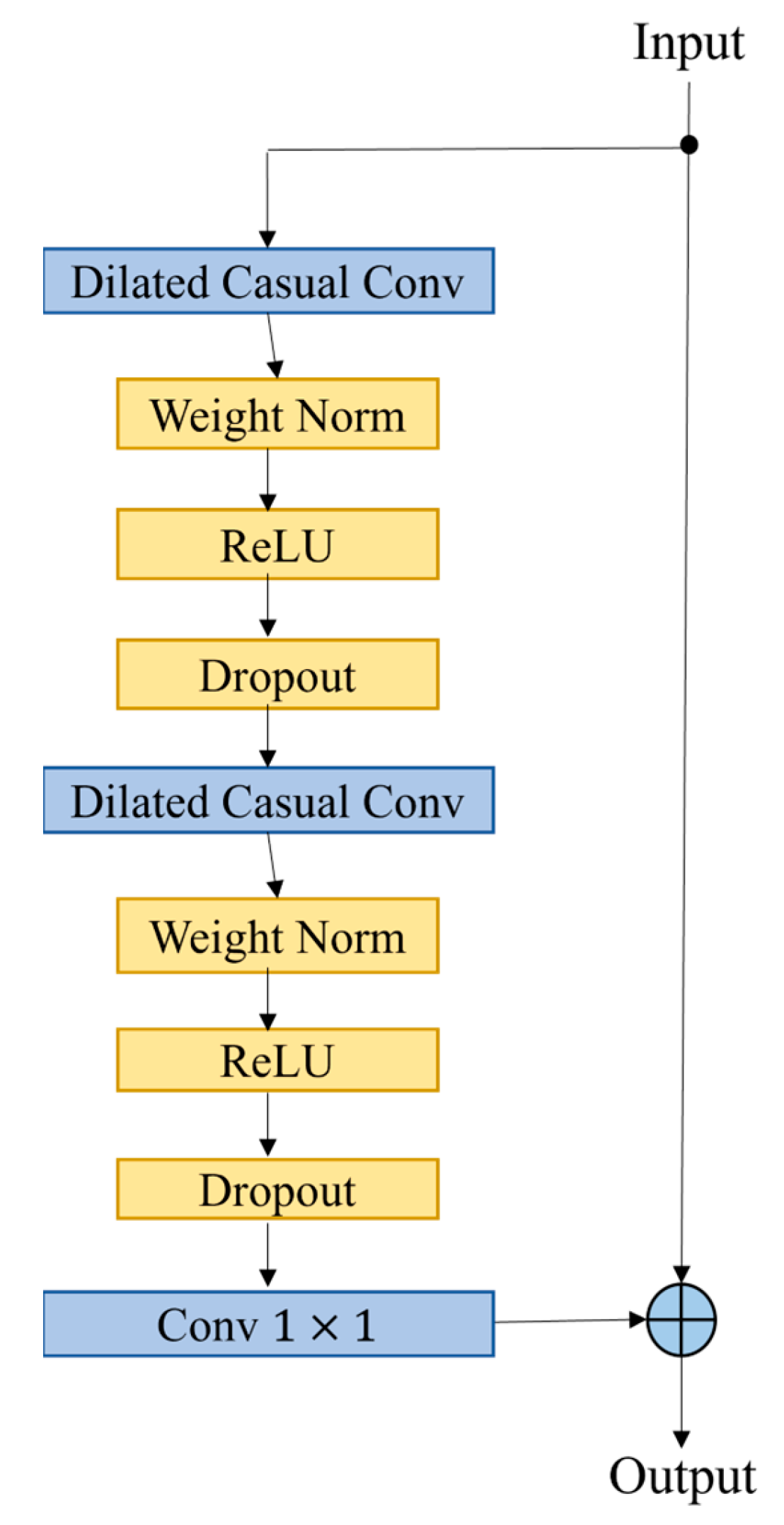
2.4.1. Sequence Space Feature Representation Based on TCN
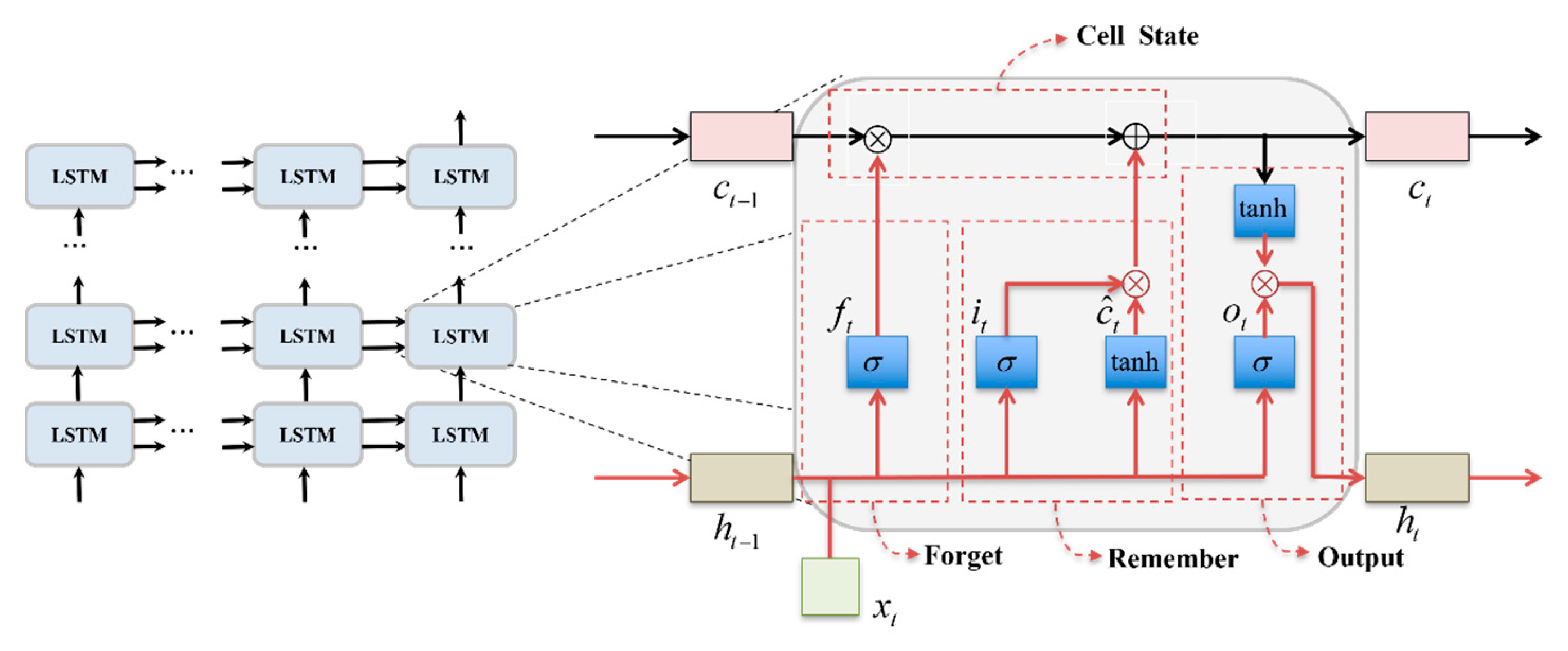
2.4.2. LSTM
2.4.3. Attention-Based Tensor Concatenation Module
3. Experiments
3.1. Material Preparation
3.1.1. Wake Vortex CFD Numerical Simulation Data
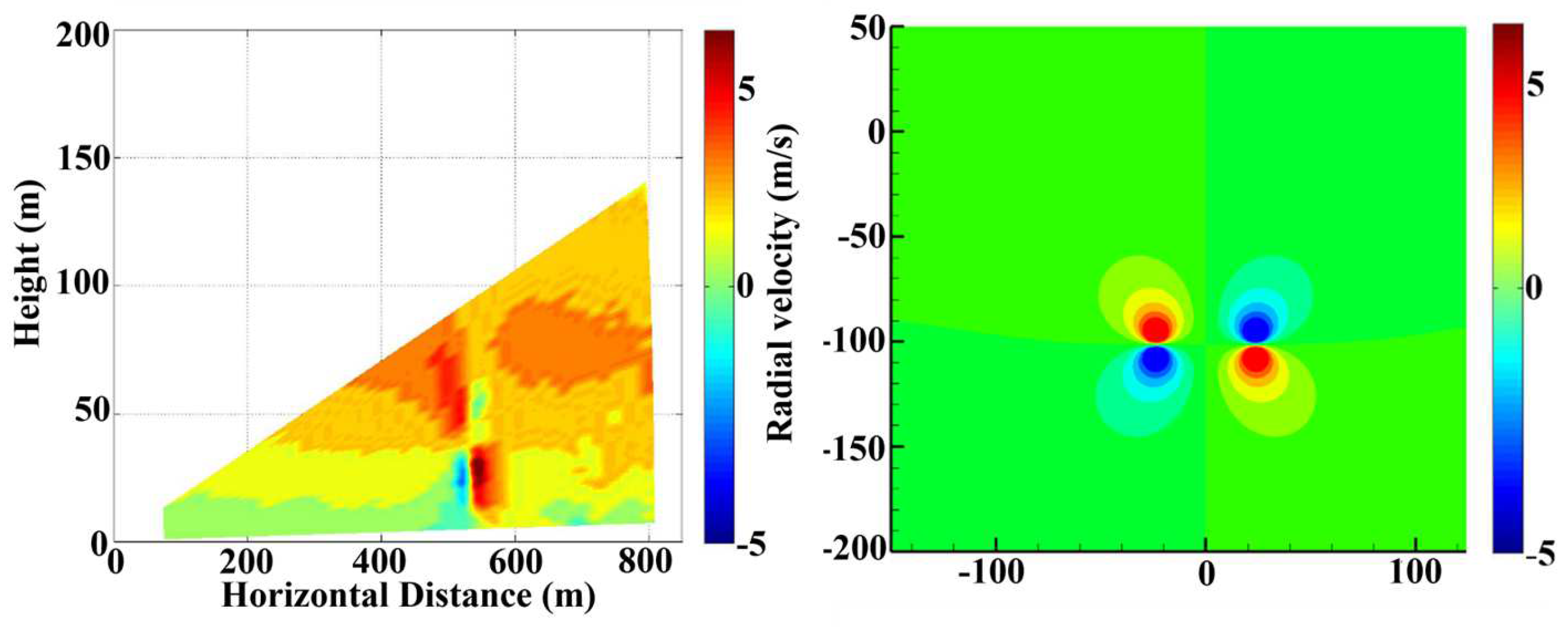
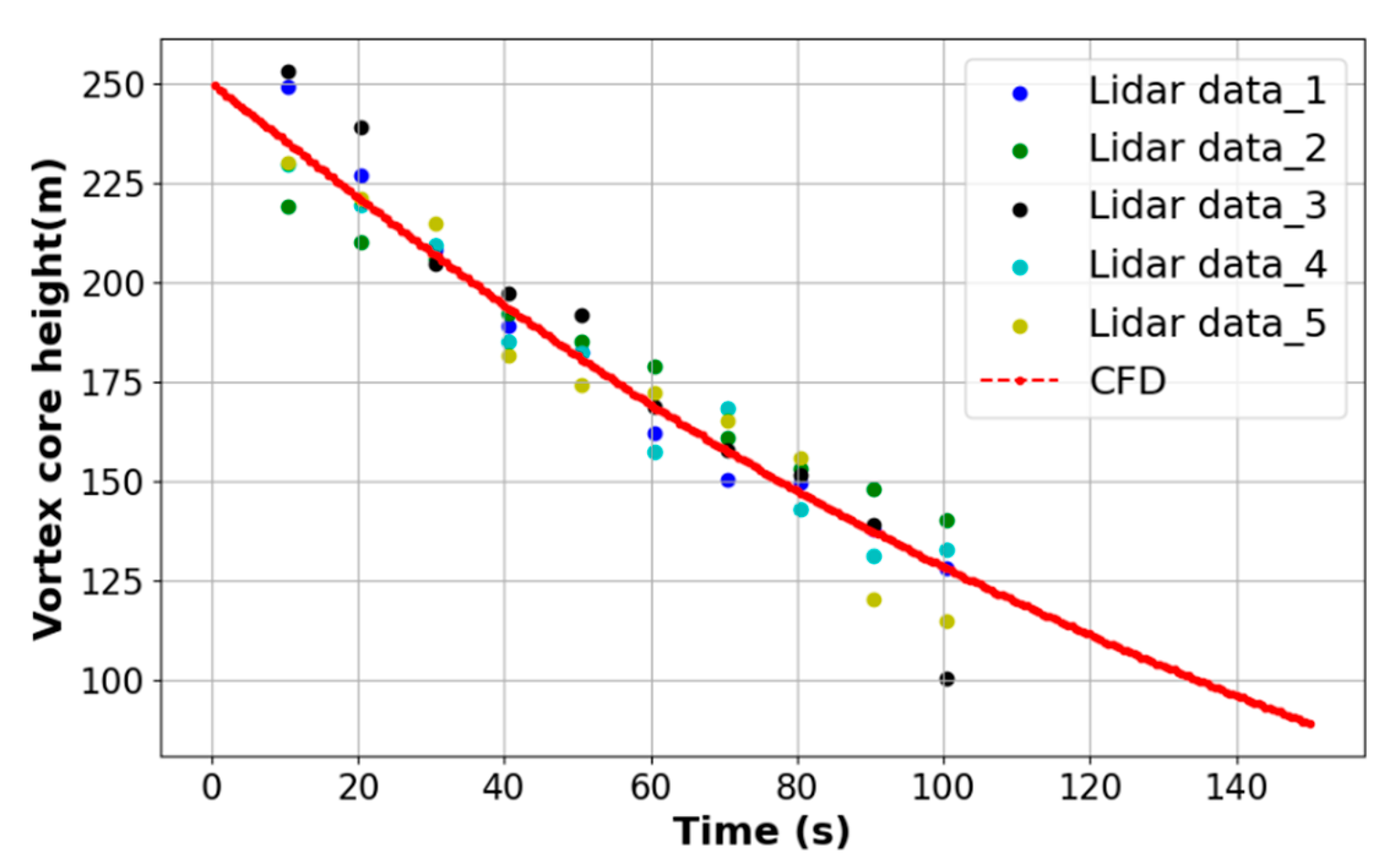
3.1.2. CFD Data Validation
3.2. Evaluation Criteria
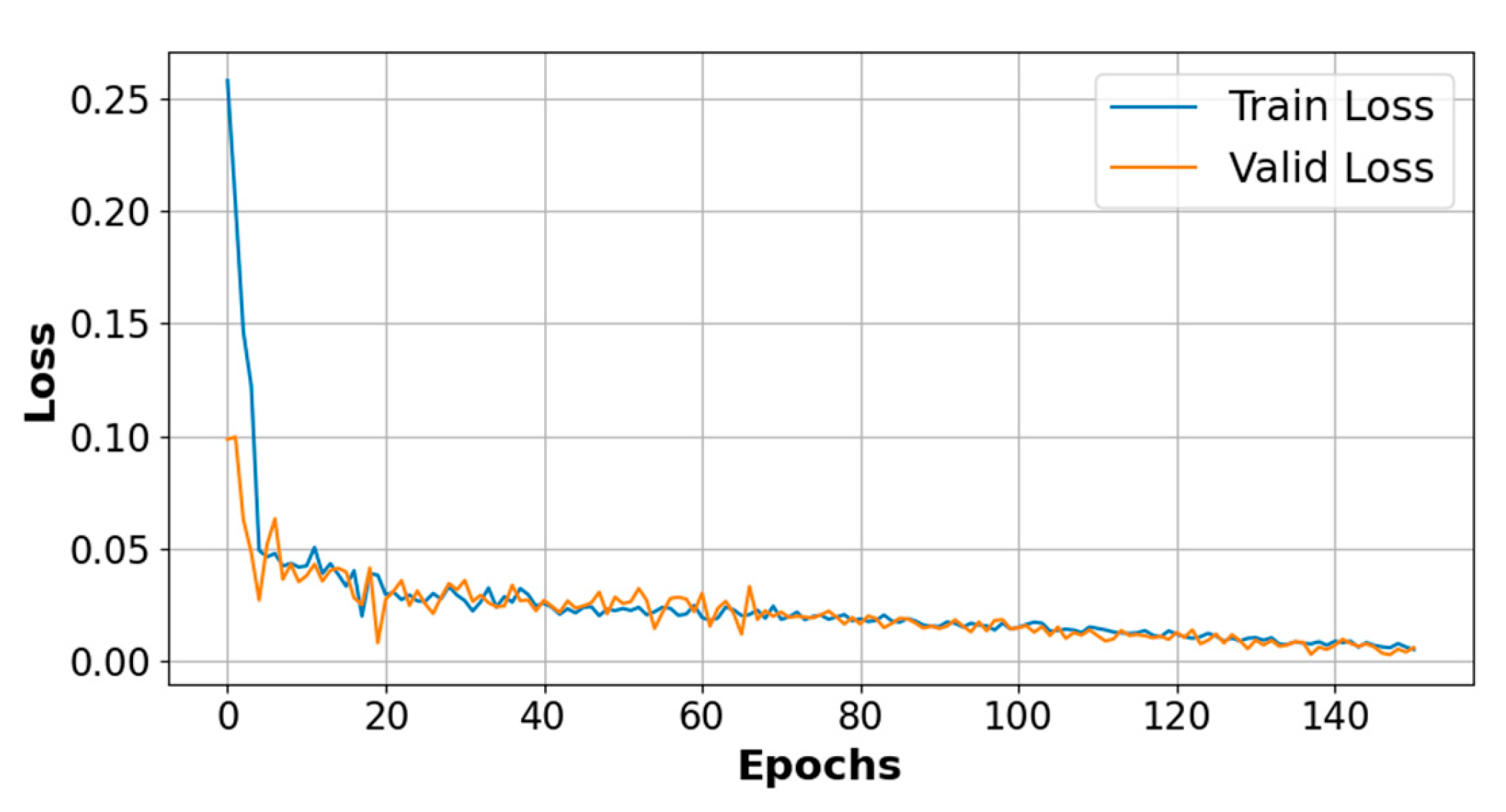
3.3. PA-TLA Parameter Configuration
3.4. Results Analysis
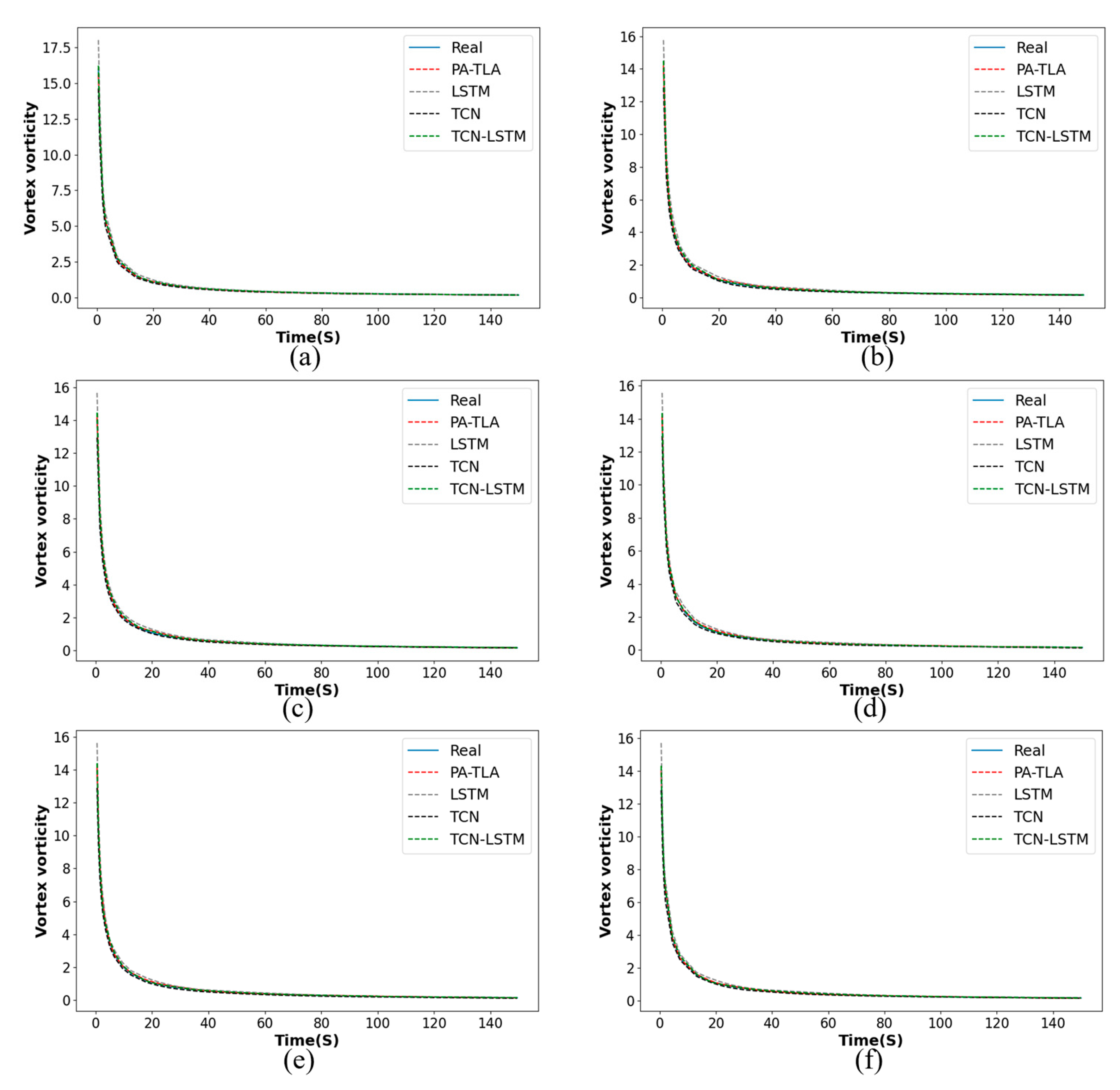
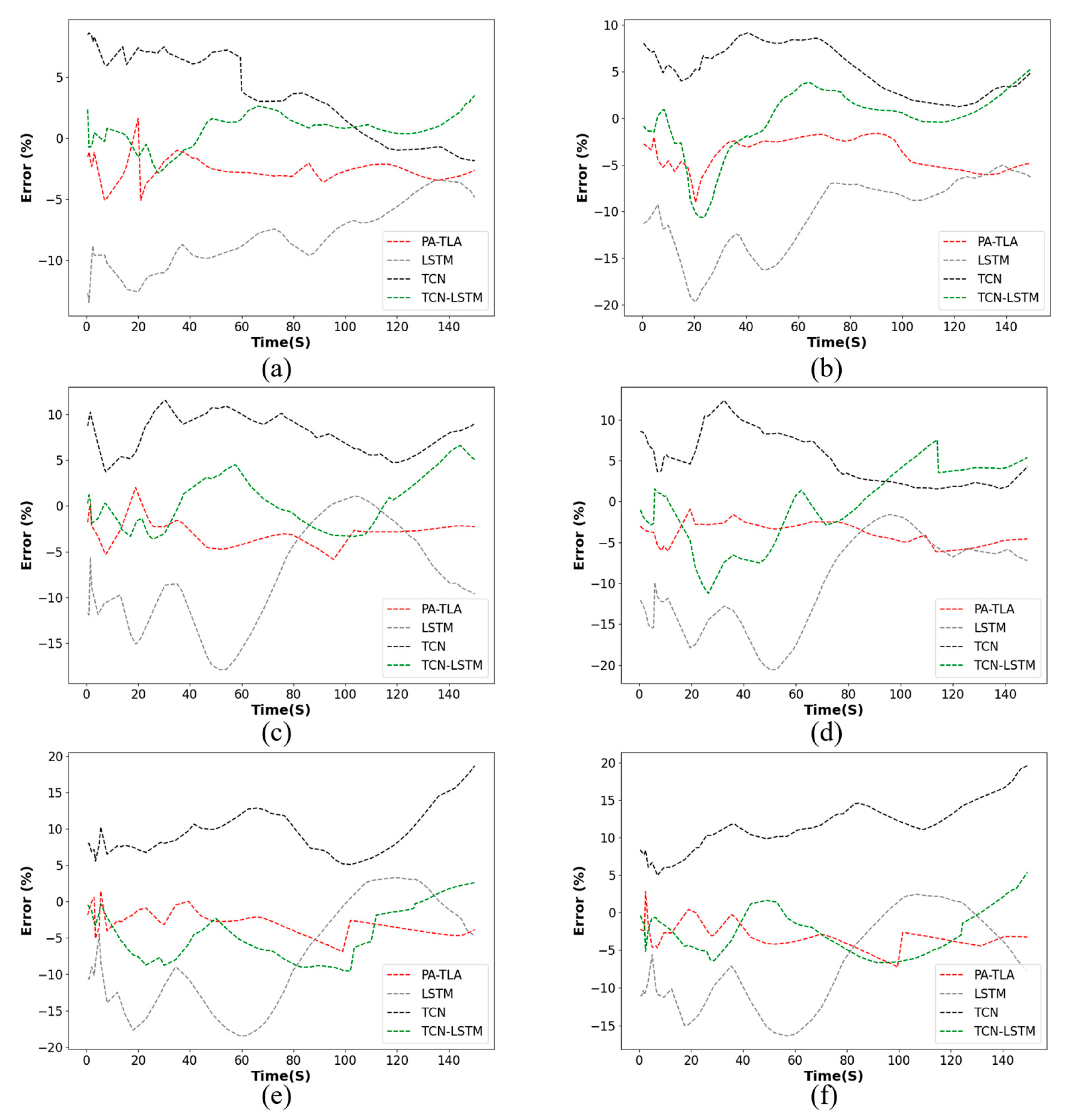
3.4.1. Wake Evolution Prediction Model Based on PA-TLA
3.4.2. Analysis of Near-Ground Phase Wake Vortex Evolution Characteristics Combining Numerical Simulation and PA-TLA Model
4. Conclusions
- (1)
- By integrating temporal-spatial feature extraction, LSTM, and attention mechanisms, the PA-TLA model effectively captures the temporal dynamics of the data. The PA-TLA model outperforms both LSTM and the TCN in predicting the circulation, Q-criterion, and vorticity of wake vortices at various initial heights. Compared to traditional CFD methods, this model improves computational efficiency by approximately 40 times.
- (2)
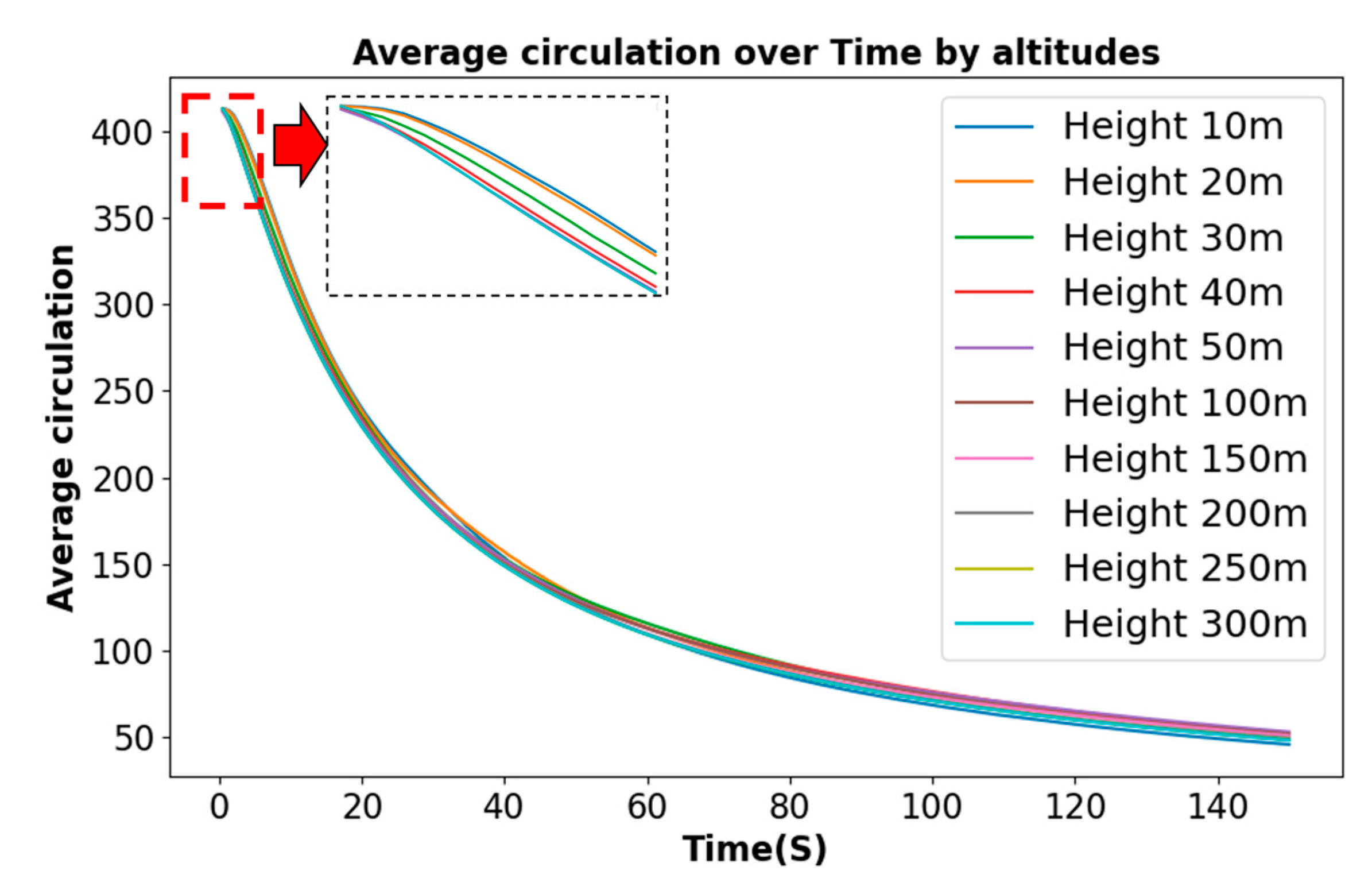
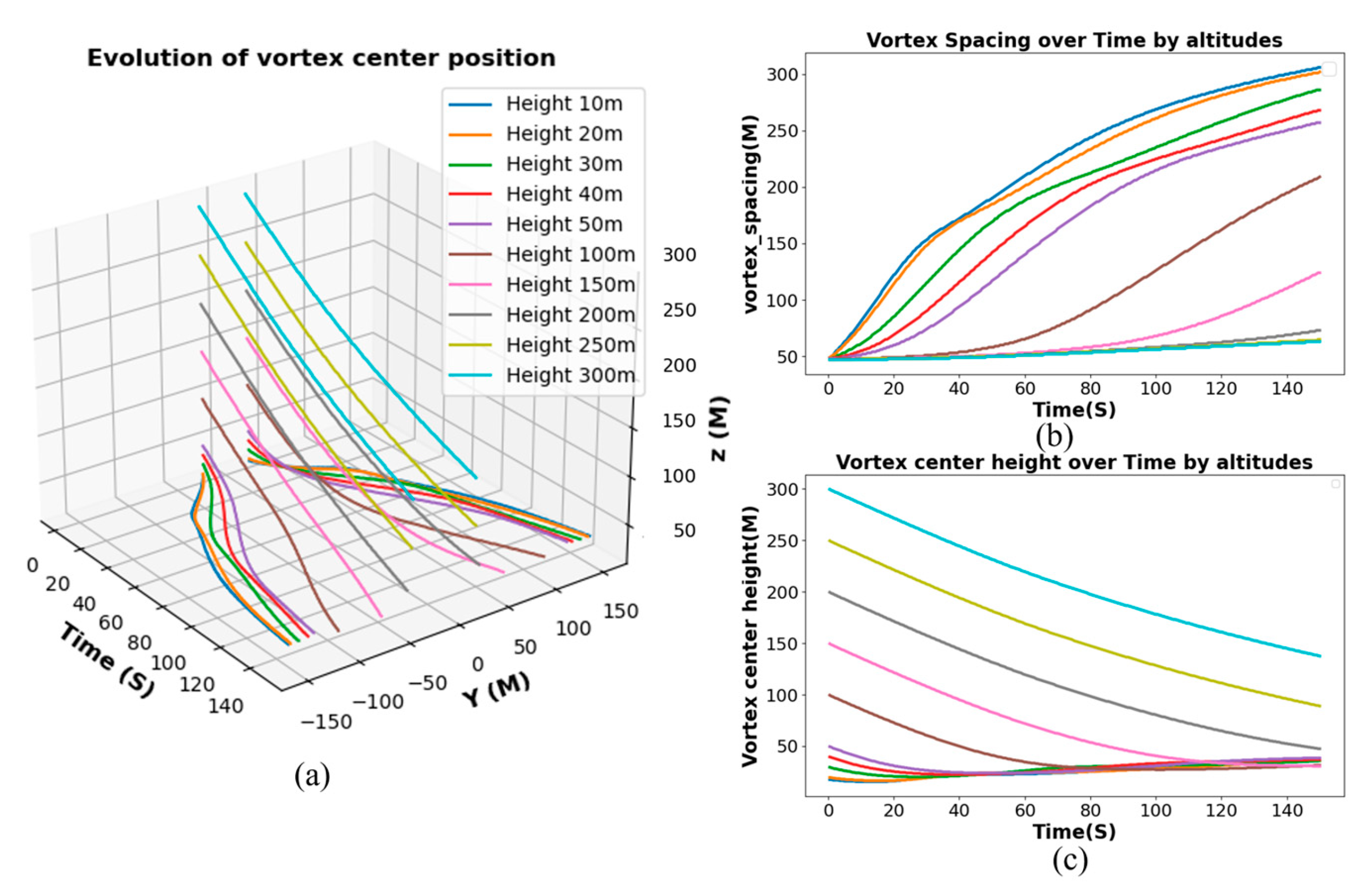
- The parallel learning of spatial and temporal features with the embedded attention mechanism in PA-TLA enables accurate tracking and prediction of the following key evolutionary phases and ground effects of the CFD-simulated vortex cores, and different initial heights significantly impact the evolution of wake vortices. The circulation of aircraft wake vortices continuously decays, and at heights of 10 m–50 m, influenced by ground effect, the higher the altitude, the faster the decay rate. Additionally, the vortex core position initially sinks briefly before showing an upward trend. The ground effect increases the distance between two vortices, leading to isolated vortex stages and weakening the mutual induction forces between them. From 50 m to 300 m, as the ground effect weakens, the circulation declines in almost the same trend, and the vortex core position continues to drop.
- (3)
- This study provides important insights for the research of paired approach wake separation. The proposed model effectively reduces the computational time for aircraft wake evolution characteristics. This research enables a more detailed exploration of safe wake intervals for paired aircraft at different altitudes.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Elsenaar, B. Improved wake vortex separation ruling and reduced wake signatures. WakeNet2-Eur. Collab. WakeNet-USA 2006, 1, 1–51. [Google Scholar]
- Holzäpfel, F.; Steen, M. Aircraft Wake-Vortex Evolution in Ground Proximity: Analysis and Parameterization. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2006. [Google Scholar]
- Holzäpfel, F. Probabilistic Two-Phase Wake Vortex Decay and Transport Model. J. Aircr. 2003, 40, 323–331. [Google Scholar] [CrossRef]
- Sekine, K.; Kato, F.; Kageyama, K.; Itoh, E. Data-Driven Simulation for Evaluating the Impact of Lower Arrival Aircraft Separation on Available Airspace and Runway Capacity at Tokyo International Airport. Aerospace 2021, 8, 165. [Google Scholar] [CrossRef]
- Gerz, T.; Holzäpfel, F.; Darracq, D. Commercial Aircraft Wake Vortices. Prog. Aerosp. Sci. 2002, 38, 181–208. [Google Scholar] [CrossRef]
- Crow, S. Stability Theory for a Pair of Trailing Vortices. In Proceedings of the 8th Aerospace Sciences Meeting, New York, NY, USA, 19–21 January 1970; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1970. [Google Scholar]
- Holzäpfel, F.; Hofbauer, T.; Darracq, D.; Moet, H.; Garnier, F.; Gago, C.F. Analysis of Wake Vortex Decay Mechanisms in the Atmosphere. Aerosp. Sci. Technol. 2003, 7, 263–275. [Google Scholar] [CrossRef]
- Han, J.; Lin, Y.-L.; Arya, S.; Proctor, F. Large Eddy Simulation of Aircraft Wake Vortices in a Homogeneous Atmospheric Turbulence—Vortex Decay and Descent. In Proceedings of the 37th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 11–14 January 1999; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1999. [Google Scholar]
- Holzäpfel, F.; Gerz, T.; Baumann, R. The Turbulent Decay of Trailing Vortex Pairs in Stably Stratified Environments. Aerosp. Sci. Technol. 2001, 5, 95–108. [Google Scholar] [CrossRef]
- Lin, M.; Huang, W.; Zhang, Z.; Xu, C.; Cui, G. Numerical Study of Aircraft Wake Vortex Evolution near Ground in Stable Atmospheric Boundary Layer. Chin. J. Aeronaut. 2017, 30, 1866–1876. [Google Scholar] [CrossRef]
- Harvey, J.K.; Perry, F.J. Flowfield Produced by Trailing Vortices in the Vicinity of the Ground. AIAA J. 1971, 9, 1659–1660. [Google Scholar] [CrossRef]
- Harris, D.M.; Williamson, C.H.K. Instability of Secondary Vortices Generated by a Vortex Pair in Ground Effect. J. Fluid Mech. 2012, 700, 148–186. [Google Scholar] [CrossRef]
- Zheng, T.-Y.; Wang, S.-Y.; Wang, G.-X.; Deng, X.-G. High-Order Natural Transition Simulation Method Based on Deep Residual Network. Acta Phys. Sin. 2020, 69, 204701. [Google Scholar] [CrossRef]
- Wu, L.; Cui, B.; Xiao, Z. Artificial Neural Network-Based One-Equation Model for Simulation of Laminar-Turbulent Transitional Flow. Theor. Appl. Mech. Lett. 2023, 13, 100387. [Google Scholar] [CrossRef]
- Carpenter, M.; Hartfield, R.; Burkhalter, J. A Comprehensive Approach to Cataloging Missile Aerodynamic Performance Using Surrogate Modeling Techniques and Statistical Learning. In Proceedings of the 29th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 27–30 June 2011; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2011. [Google Scholar]
- Balla, K.; Sevilla, R.; Hassan, O.; Morgan, K. An Application of Neural Networks to the Prediction of Aerodynamic Coefficients of Aerofoils and Wings. Appl. Math. Model. 2021, 96, 456–479. [Google Scholar] [CrossRef]
- Wang, Z.; Xiao, D.; Fang, F.; Govindan, R.; Pain, C.C.; Guo, Y. Model Identification of Reduced Order Fluid Dynamics Systems Using Deep Learning. Int. J. Numer. Methods Fluids 2017, 86, 255–268. [Google Scholar] [CrossRef]
- Tang, Z.-G.; Zhu, L.-Y.; Xiang, X.-H.; He, L.; Zhao, D.; Wang, Y.-Q.; Qian, W.-Q.; Yuan, X.-X. Several research progress and prospects of intelligent aerodynamics. Chin. J. Aerodyn. 2023, 41, 1–35. [Google Scholar]
- Xu, Y.; Sha, Y.; Wang, C.; Cao, W.; Wei, Y. Comparative Studies of Predictive Models for Unsteady Flow Fields Based on Deep Learning and Proper Orthogonal Decomposition. Ocean. Eng. 2023, 272, 113935. [Google Scholar] [CrossRef]
- He, X.; Zhao, R.; Gao, H.; Yuan, C.; Wang, J. Prediction of Aircraft Wake Vortices under Various Crosswind Velocities Based on Convolutional Neural Networks. Sustainability 2023, 15, 13383. [Google Scholar] [CrossRef]
- Lauer, N.; Yeo, D.W.; Snyder, D.A.; Paley, D.A. Tip-Vortex Localization for Cross-Stream Position Control of a Multi-Hole Probe Relative to a Stationary Wing in a Free-Jet Wind Tunnel. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2017. [Google Scholar]
- Seaver, N. Attention Is All You Need: Humans and Computers in the Time of Neural Networks. In Scenes of Attention; Columbia University Press: New York, NY, USA, 2023; pp. 230–248. [Google Scholar]
- Breitsamter, C. Wake Vortex Characteristics of Transport Aircraft. Prog. Aerosp. Sci. 2011, 47, 89–134. [Google Scholar] [CrossRef]
- Zhang, J.-D.; Zuo, Q.-H.; Lin, M.-D.; Huang, W.-X.; Pan, W.-J.; Cui, G.-X. Evolution of Vortices in the Wake of an ARJ21 Airplane: Application of the Lift-Drag Model. Theor. Appl. Mech. Lett. 2020, 10, 419–428. [Google Scholar] [CrossRef]
- Holzäpfel, F.; Gerz, T.; Köpp, F.; Stumpf, E.; Harris, M.; Young, R.I.; Dolfi-Bouteyre, A. Strategies for Circulation Evaluation of Aircraft Wake Vortices Measured by Lidar. J. Atmos. Ocean. Technol. 2003, 20, 1183–1195. [Google Scholar] [CrossRef]
- Rojas, J.I.; Melgosa, M.; Prats, X. Sensitivity Analysis of Maximum Circulation of Wake Vortex Encountered by En-Route Aircraft. Aerospace 2021, 8, 194. [Google Scholar] [CrossRef]
- Hirsch, C. Numerical Simulation of Inviscid Flows. In Numerical Computation of Internal and External Flows; Elsevier: Amsterdam, The Netherlands, 2007; pp. 545–597. [Google Scholar]
- Rodi, W.; Constantinescu, G.; Stoesser, T. Large-Eddy Simulation in Hydraulics; CRC Press: Boca Raton, FL, USA, 2013; ISBN 9780203797570. [Google Scholar]
- Rezaeiha, A.; Montazeri, H.; Blocken, B. On the Accuracy of Turbulence Models for CFD Simulations of Vertical Axis Wind Turbines. Energy 2019, 180, 838–857. [Google Scholar] [CrossRef]
- De Visscher, I.; Bricteux, L.; Winckelmans, G. Aircraft Vortices in Stably Stratified and Weakly Turbulent Atmospheres: Simulation and Modeling. AIAA J. 2013, 51, 551–566. [Google Scholar] [CrossRef]
- Luo, H.; Pan, W.; Wang, Y.; Luo, Y. A330-300 Wake Encounter by ARJ21 Aircraft. Aerospace 2024, 11, 144. [Google Scholar] [CrossRef]
- Pan, W.; Jiang, Y.; Zhou, J.; Ye, W.; Zhang, Y. Study of Paired Approach Wake Separation Based on Crosswinds. Aerospace 2024, 11, 146. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environmental Parameter | |
| Ambient Temperature | 20 °C |
| Atmospheric Pressure | 1 atm |
| Air Density | 1.225 kg/m3 |
| Dynamic Viscosity | 1.81 × 10−5 Pa·s |
| Turbulence Intensity | 1.86% |
| Aircraft Parameters | |
| Wingspan | 60.3 m |
| Maximum Landing Weight | 182,000 kg |
| Speed | 72 m/s |
| Initial Vortex Circulation | 427 m2/s |
| Vortex Core Radius | 3 m ≈ 0.052B |
| Initial Vortex Spacing | 47.36 m ≈ Bπ/4 |
| Characteristic Speed | 1.436 m/s |
| Characteristic Duration | 33 s |
| Feature | Model | MSE | MAE | RMSE | R2 |
|---|---|---|---|---|---|
| Q-criterion | TCN | 0.239 | 0.086 | 0.149 | 97.891 |
| LSTM | 0.274 | 0.091 | 0.189 | 97.147 | |
| TCN-LSTM | 0.205 | 0.073 | 0.134 | 98.712 | |
| PA-TLA | 0.191 | 0.066 | 0.129 | 99.161 | |
| Vorticity | TCN | 0.109 | 0.123 | 0.331 | 97.163 |
| LSTM | 0.113 | 0.136 | 0.335 | 96.934 | |
| TCN-LSTM | 0.085 | 0.096 | 0.267 | 97.934 | |
| PA-TLA | 0.079 | 0.088 | 0.252 | 98.256 | |
| Circulation | TCN | 12.749 | 2.968 | 4.192 | 96.736 |
| LSTM | 13.141 | 3.352 | 4.753 | 96.356 | |
| TCN-LSTM | 10.356 | 2.105 | 3.206 | 97.846 | |
| PA-TLA | 9.682 | 1.956 | 3.075 | 98.158 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, L.; Pan, W.; Wang, Y.; Luan, T.; Leng, Y. Aircraft Wake Evolution Prediction Based on Parallel Hybrid Neural Network Model. Aerospace 2024, 11, 489. https://doi.org/10.3390/aerospace11060489
Deng L, Pan W, Wang Y, Luan T, Leng Y. Aircraft Wake Evolution Prediction Based on Parallel Hybrid Neural Network Model. Aerospace. 2024; 11(6):489. https://doi.org/10.3390/aerospace11060489
Chicago/Turabian StyleDeng, Leilei, Weijun Pan, Yuhao Wang, Tian Luan, and Yuanfei Leng. 2024. "Aircraft Wake Evolution Prediction Based on Parallel Hybrid Neural Network Model" Aerospace 11, no. 6: 489. https://doi.org/10.3390/aerospace11060489
APA StyleDeng, L., Pan, W., Wang, Y., Luan, T., & Leng, Y. (2024). Aircraft Wake Evolution Prediction Based on Parallel Hybrid Neural Network Model. Aerospace, 11(6), 489. https://doi.org/10.3390/aerospace11060489