
Operational Angular Track Reconstruction in Space Surveillance Radars through an Adaptive Beamforming Approach

 , , , and
, , , and 
Abstract
1. Introduction
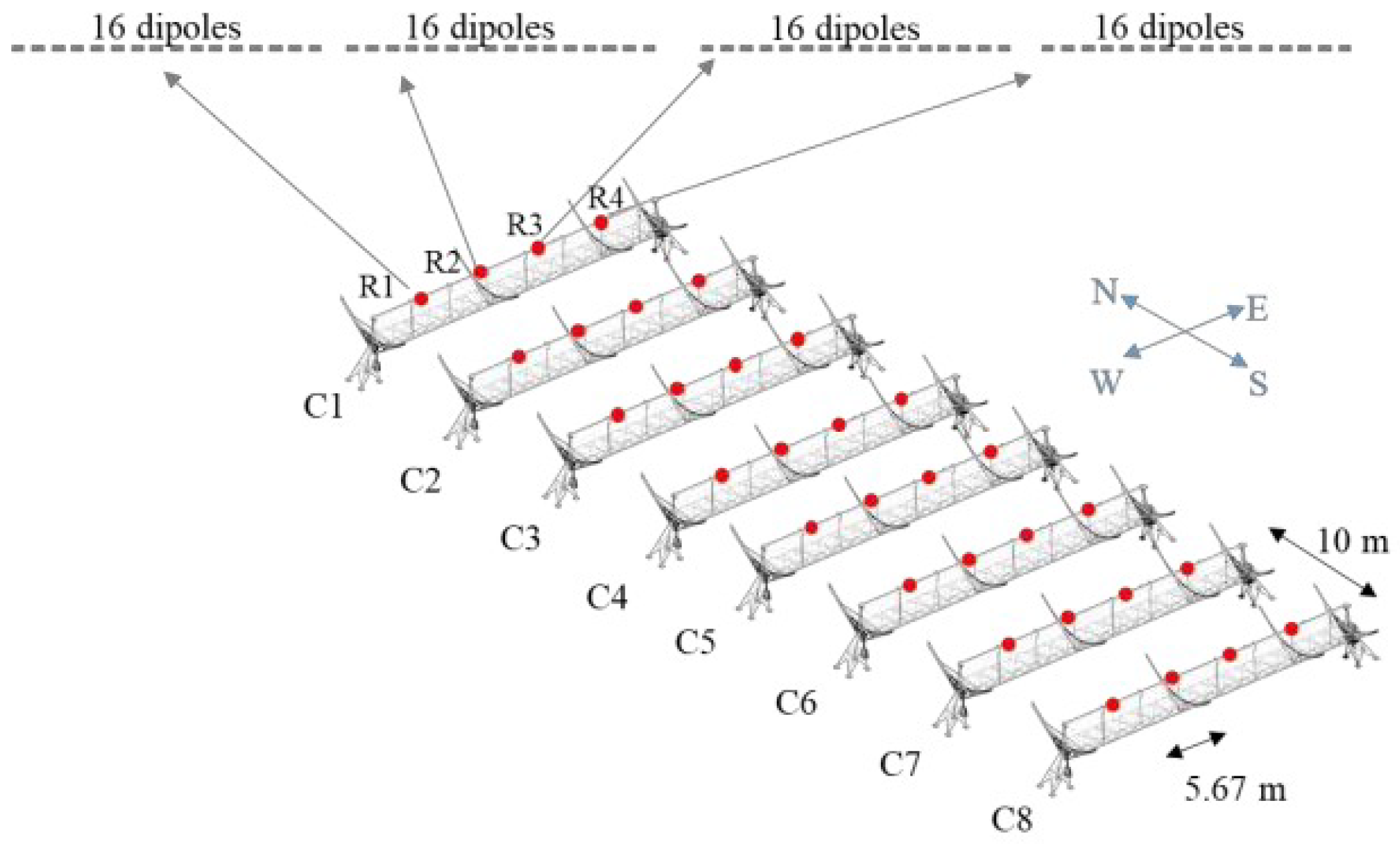
2. BIRALES
3. Music Approach for Track Estimate and Refinement
3.1. Data Model
3.2. Multiple Signal Classification (MUSIC)
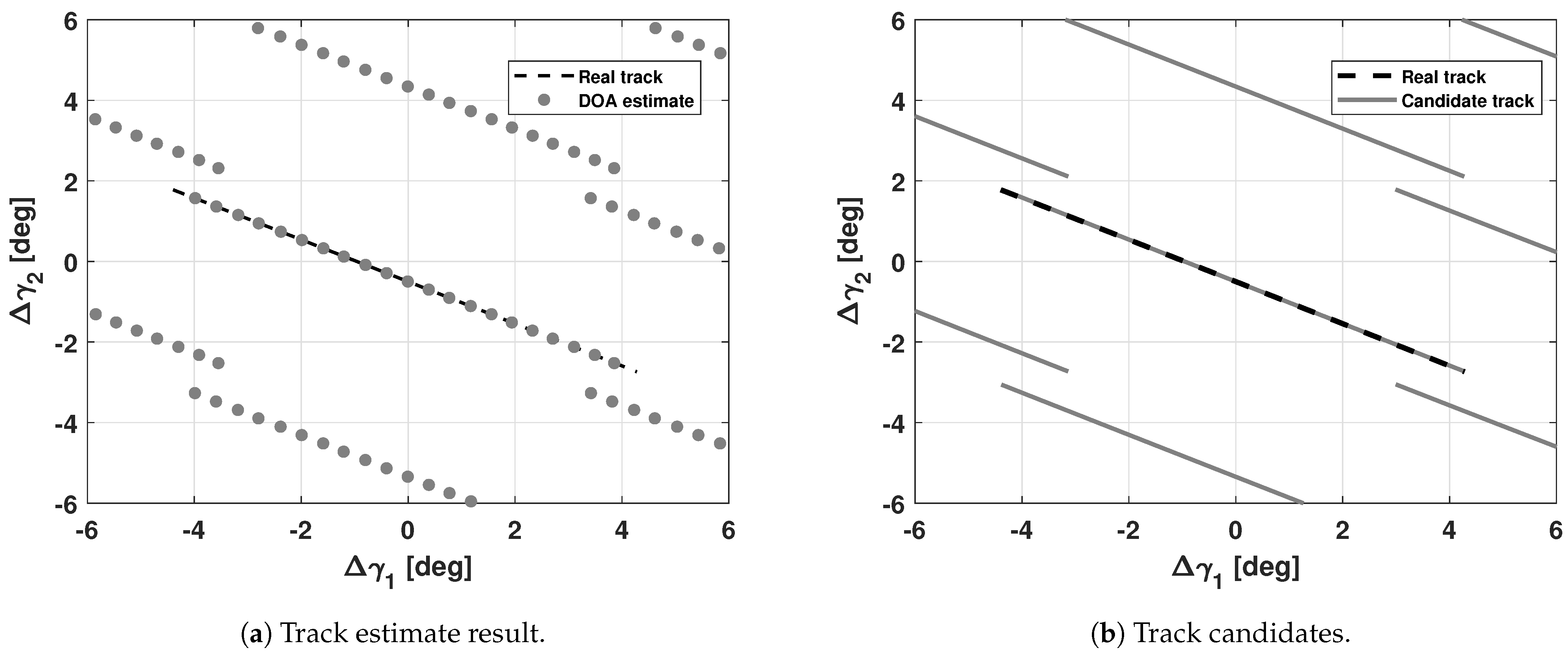
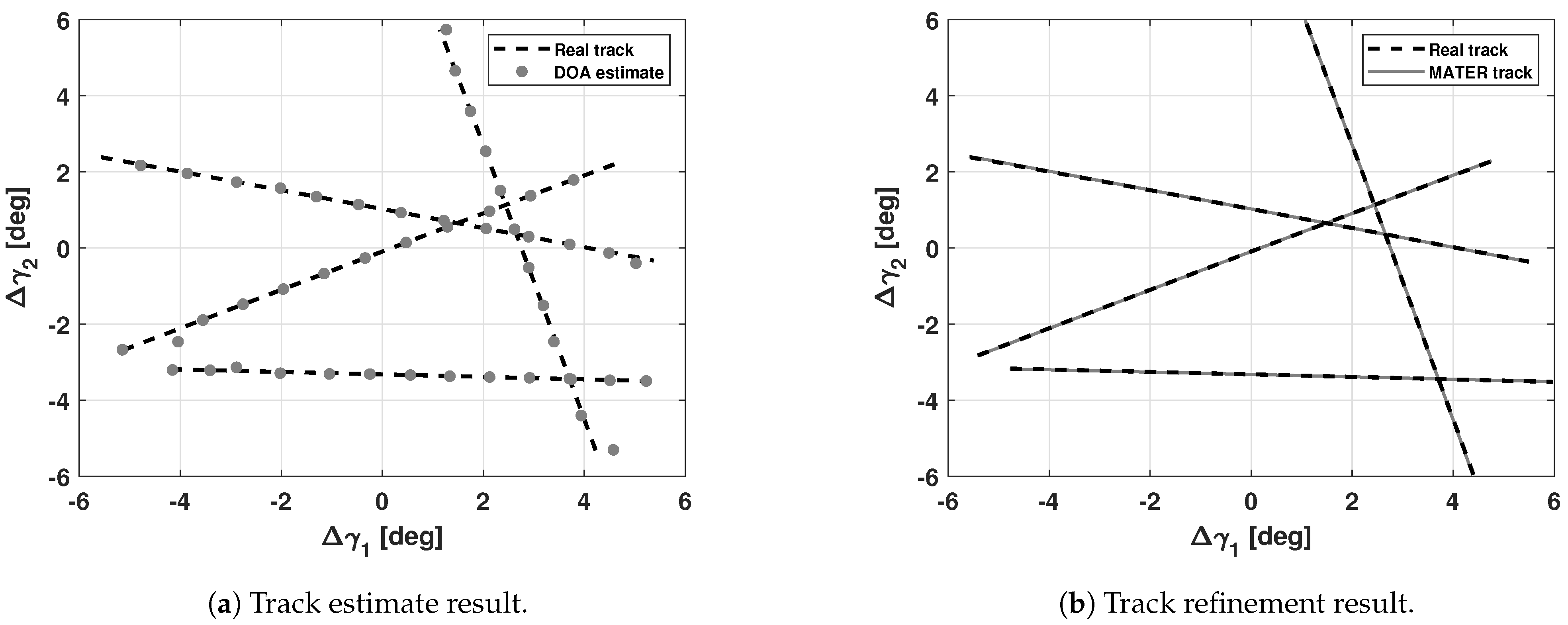
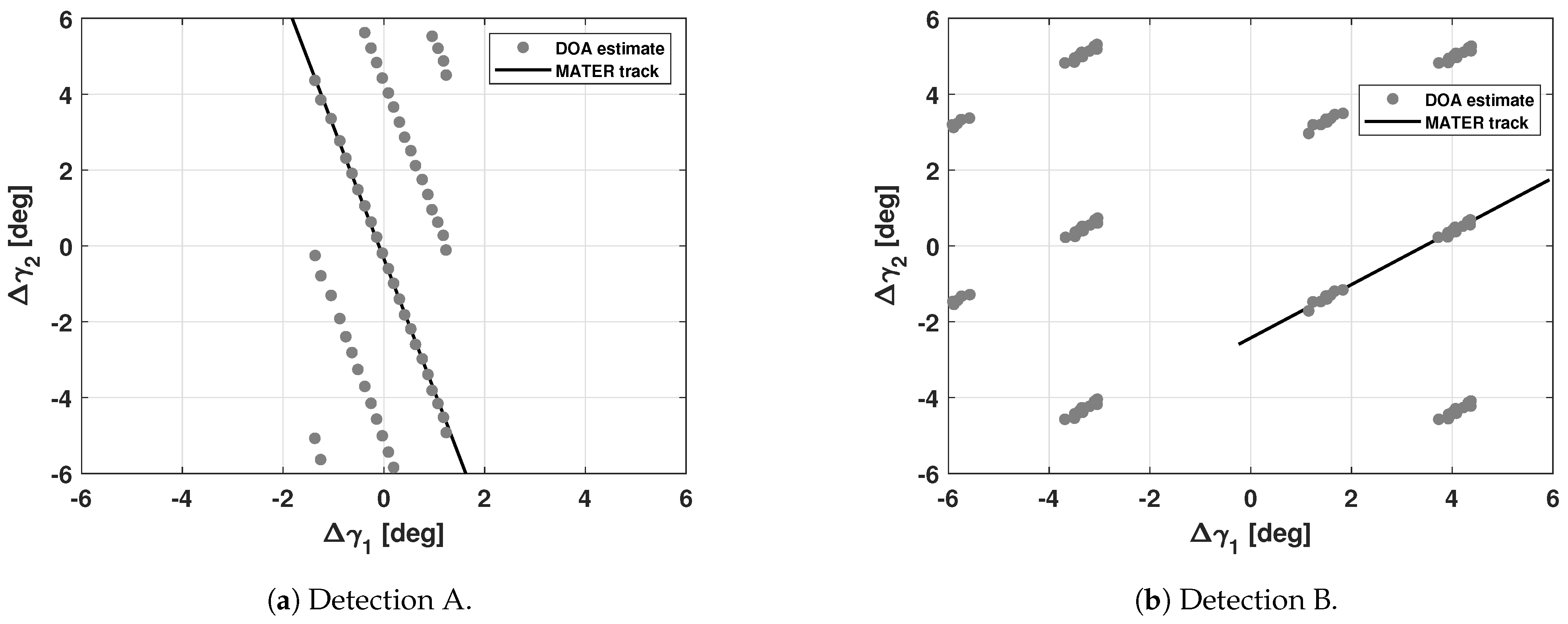
3.3. Ambiguity Problem
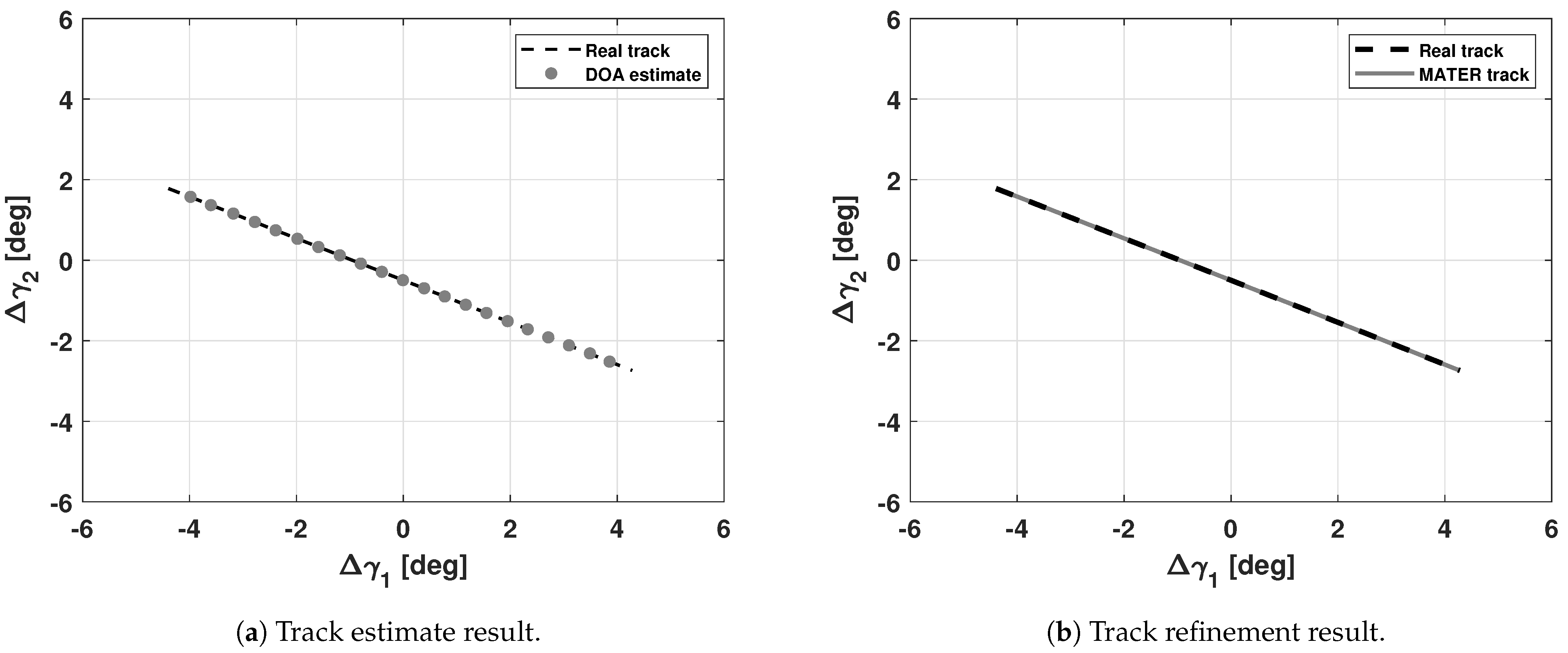
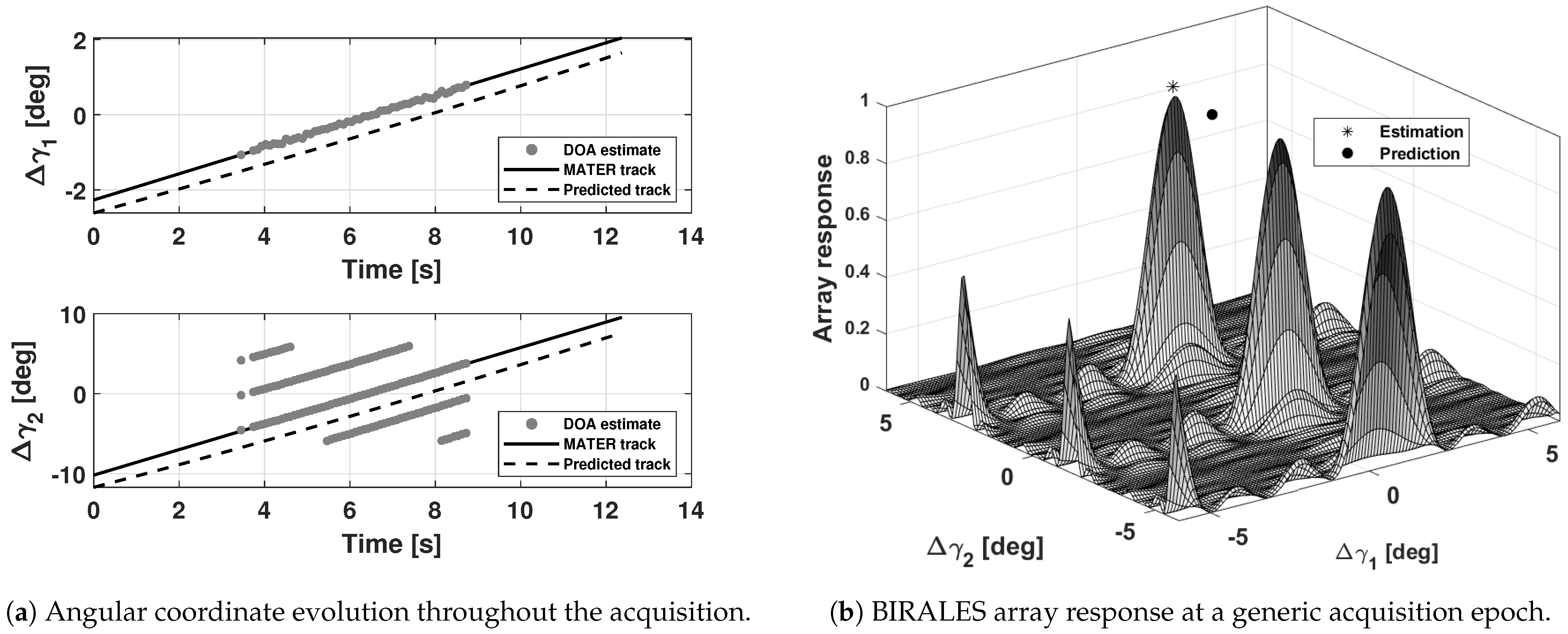
3.4. MATER Algorithm
3.4.1. Most Populated Cluster Criterion
3.4.2. Delta-k Technique Based Criterion
- Since the target is moving, its relative velocity with respect to the station changes during the signal integration time in which the CM is created. Thus, this induces different Doppler shift effects in the transmitted signal.
- Regardless of its attitude and tumbling, the different target surfaces move with a peculiar relative velocity with respect to the receiver, and this provokes Doppler shift effects in the transmitted signal.
3.4.3. Orbit Determination and Signal-to-Noise Ratio Criteria
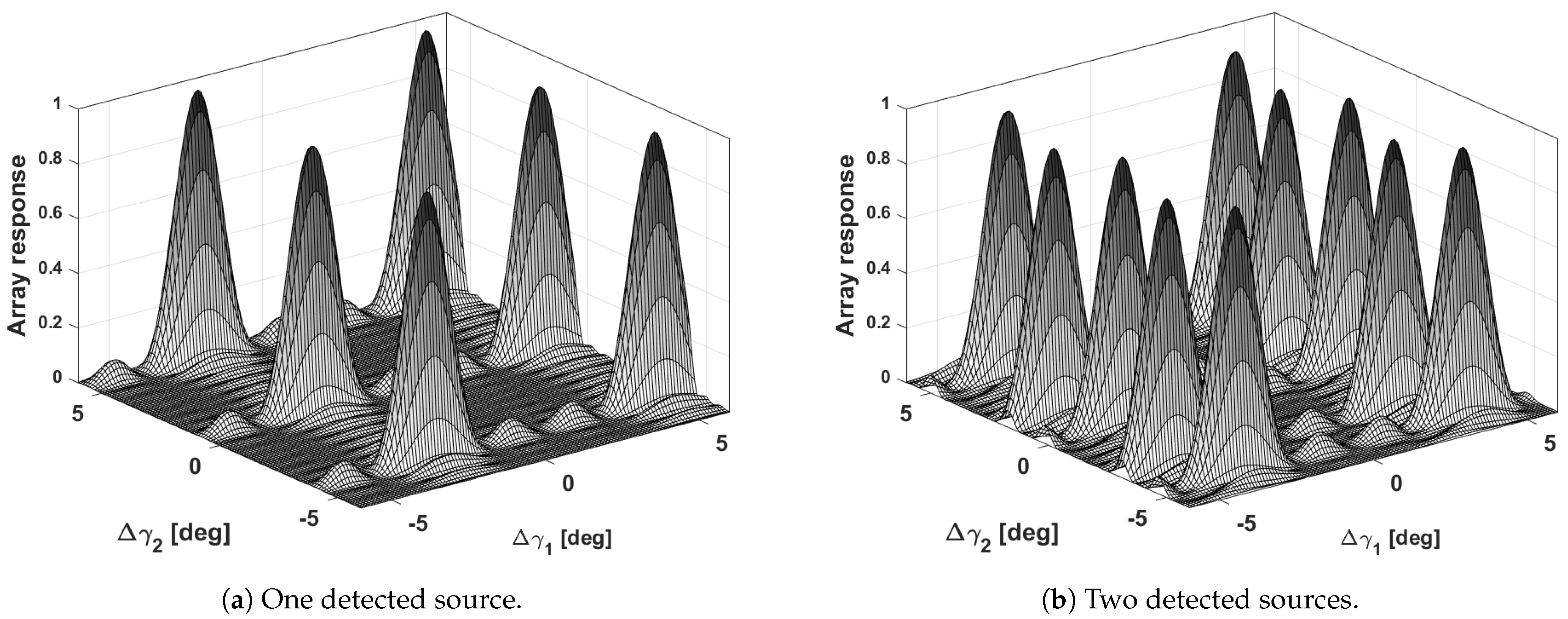
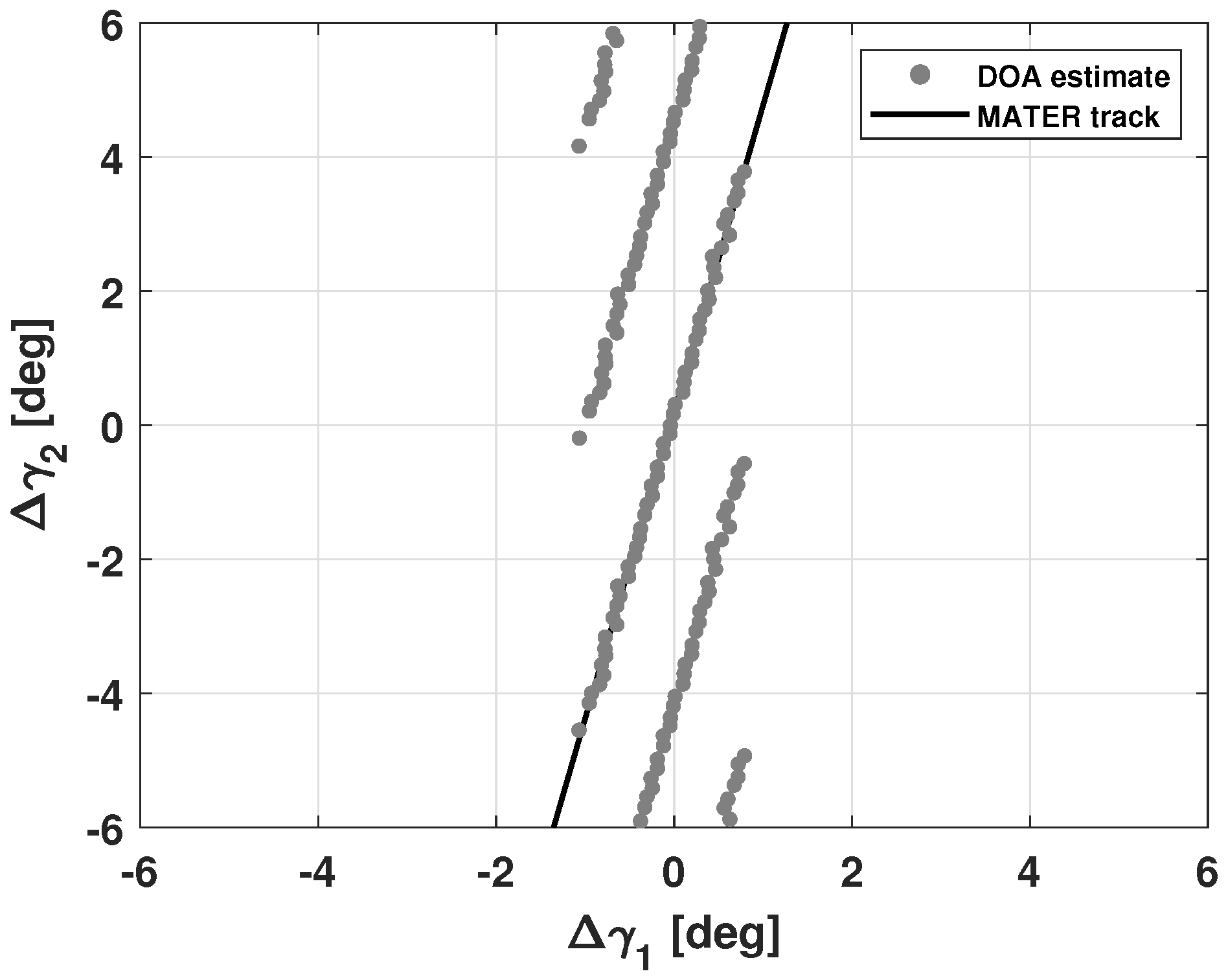
3.5. MATER in Multiple Source Scenarios
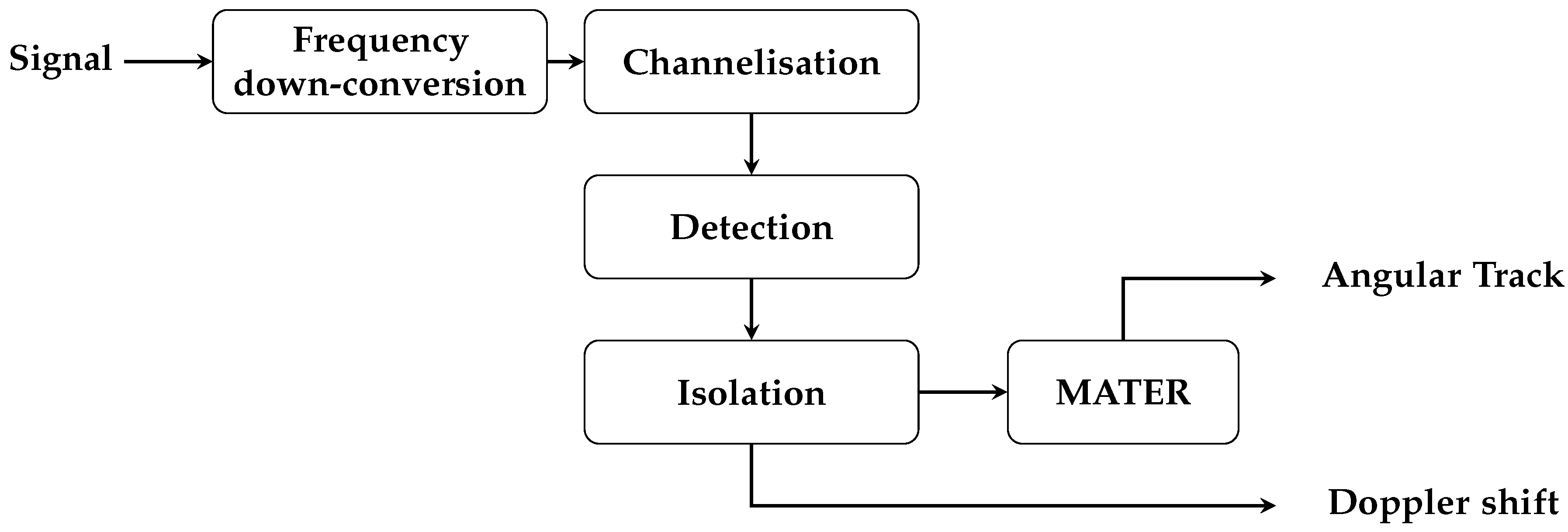
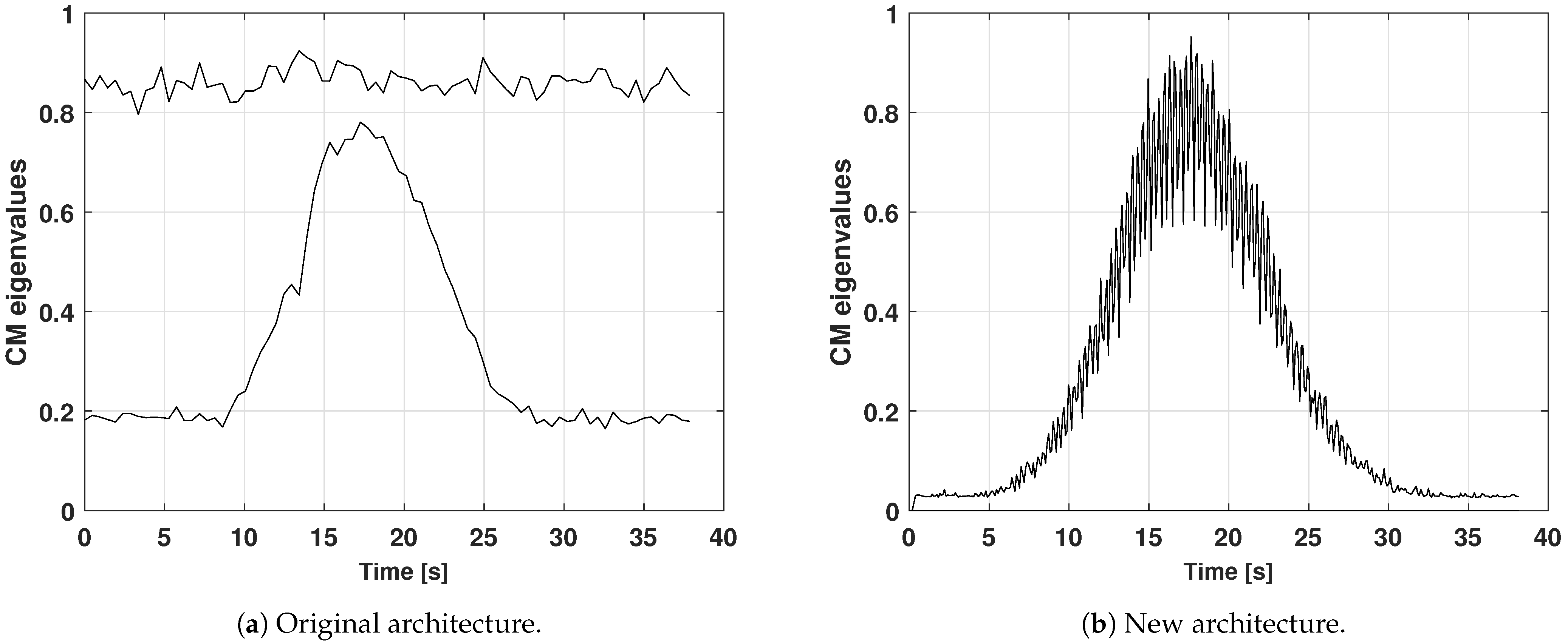
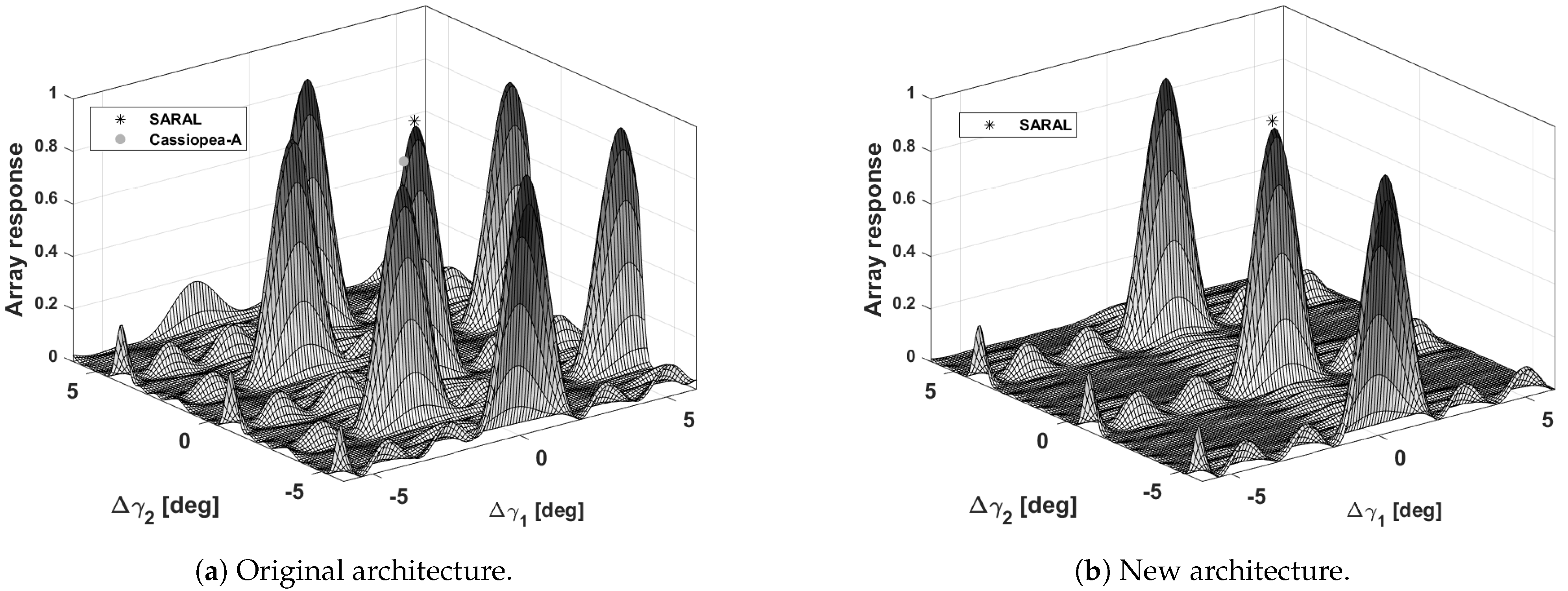
4. Architectural Design
5. Operational Applications
5.1. SARAL Transit Observation
5.2. Aeolus Re-Entry
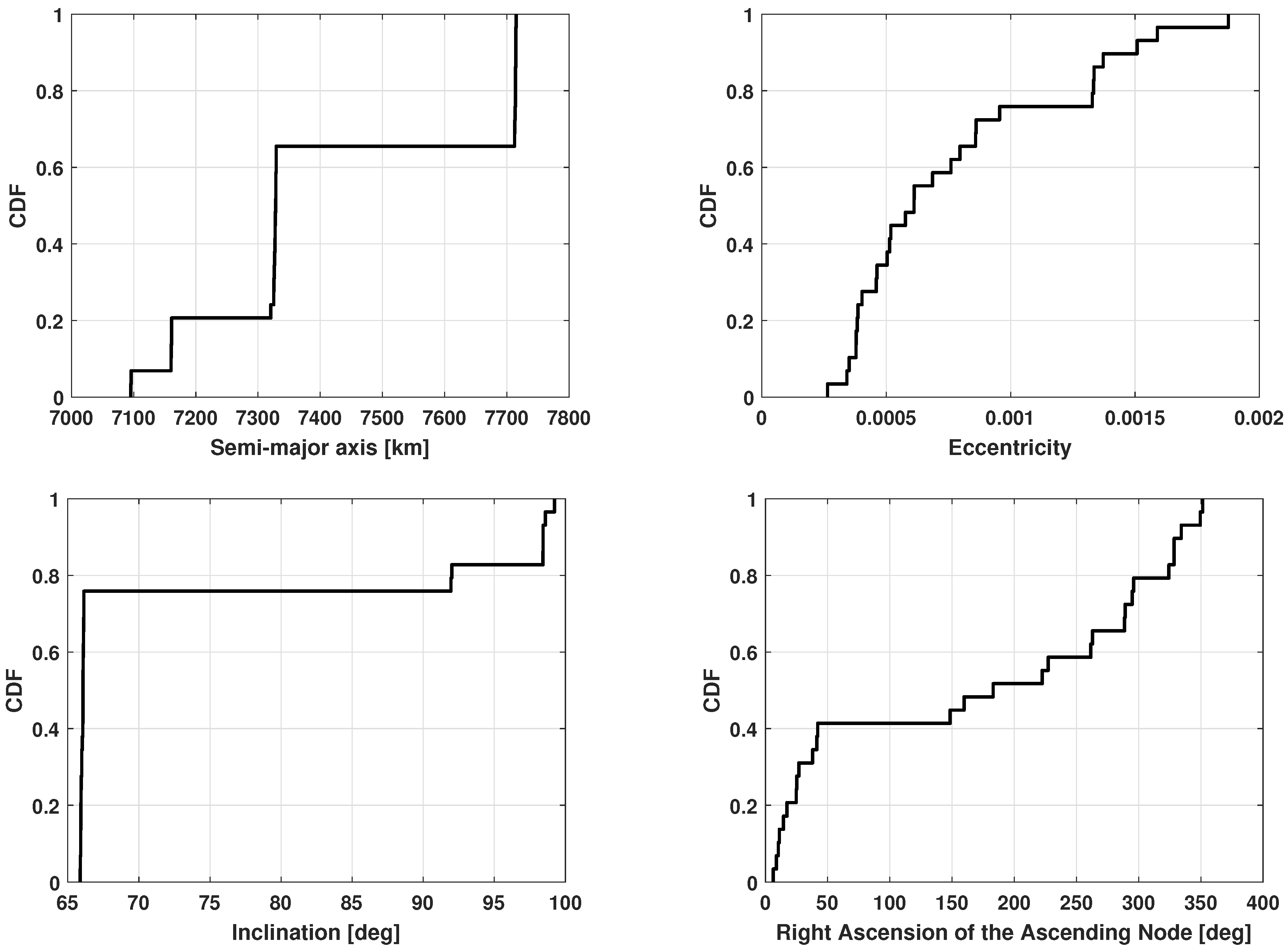
5.3. Calibrators Data Set
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BIRALES | Bistatic Radar for LEO Survey |
| CDF | Cumulative Distribution Function |
| CM | Correlation Matrix |
| CW | Continuous Wave |
| DOA | Direction of Arrival |
| DS | Doppler Shift |
| ESA | European Space Agency |
| ESA-SSA | ESA Space Situational Awareness Programme |
| EUSST | European Union Space Surveillance and Tracking consortium |
| FoV | Field of View |
| IADC | Inter-Agency Space Debris Coordination Committee |
| IOD | Initial Orbit Determination |
| LEO | Low Earth Orbit |
| MD | Mahalanobis Distance |
| OD | Orbit Determination |
| RMSE | Root Mean Square Error |
| ROD | Refined Orbit Determination |
| RSO | Resident Space Object |
| SNR | Signal-to-Noise Ratio |
| SR | Slant Range |
| SST | Space Surveillance and Tracking |
| TRF | Radio Frequency Transmitter |
| UNCOPUOS | United Nations’ Committee on the Peaceful Uses of Outer Space |
| US-SSN | United States Space Surveillance Network |
References
- Space Debris by the Numbers. European Space Agency. 2023. Available online: https://www.esa.int/Space_Safety/Space_Debris/Space_debris_by_the_numbers (accessed on 9 December 2023).
- Space Debris Mitigation Guidelines. Inter-Agency Space Debris Coordination Committee (IADC). 2023. Available online: https://iadc-home.org (accessed on 9 December 2023).
- Chatters, M.E.P.; Crothers, M.B.J. Chapter 19—Space Surveillance Network. In AU-18 Space Primer; Air University Press, Maxwell Air Force Base: Montgomery, AL, USA, 2009; pp. 249–258. [Google Scholar]
- Flohrer, T.; Krag, H. Space surveillance and tracking in ESA’s SSA programme. In Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017; Volume 7. [Google Scholar]
- European Union Space Surveillance and Tracking. In EUSST Service Portfolio. Available online: https://www.satcen.europa.eu/keydocuments/EUSST_Service_Portfolio622b4b653172450001cfa321.pdf (accessed on 9 December 2023).
- Bonaccorsi, S.; Montaruli, M.F.; Di Lizia, P.; Peroni, M.; Panico, A.; Rigamonti, M.; Del Prete, F. Conjunction Analysis Software Suite for Space Surveillance and Tracking. Aerospace 2024, 11, 122. [Google Scholar] [CrossRef]
- Chan, F.K. Spacecraft Collision Probability; Aerospace Press: El Segundo, CA, USA, 2008. [Google Scholar]
- Serra, R.; Arzelier, D.; Joldes, M.; Lasserre, J.B.; Rondepierre, A.; Salvy, B. Fast and Accurate Computation of Orbital Collision Probability for Short-Term Encounters. J. Guid. Control Dyn. 2016, 39, 1009–1021. [Google Scholar] [CrossRef]
- García-Pelayo, R.; Hernando-Ayuso, J. Series for Collision Probability in Short-Encounter Model. J. Guid. Control Dyn. 2016, 39, 1904–1912. [Google Scholar] [CrossRef]
- Alfano, S. Satellite conjunction Monte Carlo analysis. Adv. Astronaut. Sci. 2009, 134, 2007–2024. [Google Scholar]
- Patera, R.P. General Method for Calculating Satellite Collision Probability. J. Guid. Control Dyn. 2001, 24, 716–722. [Google Scholar] [CrossRef]
- Bombardelli, C.; Hernando-Ayuso, J. Optimal Impulsive Collision Avoidance in Low Earth Orbit. J. Guid. Control Dyn. 2015, 38, 217–225. [Google Scholar] [CrossRef]
- De Vittori, A.; Palermo, M.F.; Lizia, P.D.; Armellin, R. Low-Thrust Collision Avoidance Maneuver Optimization. J. Guid. Control Dyn. 2022, 45, 1815–1829. [Google Scholar] [CrossRef]
- Armellin, R. Collision avoidance maneuver optimization with a multiple-impulse convex formulation. Acta Astronaut. 2021, 186, 347–362. [Google Scholar] [CrossRef]
- Armellin, R.; Di Lizia, P.; Bernelli-Zazzera, F.; Berz, M. Asteroid close encounters characterization using differential algebra: The case of Apophis. Celest. Mech. Dyn. Astron. 2010, 107, 451–470. [Google Scholar] [CrossRef]
- Di Mare, L.; Cicalò, S.; Rossi, A.; Alessi, E.M.; Valsecchi, G.B. In-Orbit Fragmentation Characterization and Parent Bodies Identification by Means of Orbital Distances. In Proceedings of the First International Orbital Debris Conference, Houston, TX, USA, 9–12 December 2019; Volume 2109, p. 6007. [Google Scholar]
- Romano, M.; Muciaccia, A.; Trisolini, M.; Di Lizia, P.; Colombo, C.; Di Cecco, A.; Salotti, L. Characterising in-orbit fragmentations with the PUZZLE software. In Proceedings of the 8th International Conference on Astrodynamics Tools and Techniques (ICATT), Virtual, 23–24 June 2021. [Google Scholar]
- Hoots, F.R.; Crawford, L.L.; Roehrich, R.L. An analytic method to determine future close approaches between satellites. J. Celest. Mech. Dyn. Astron. 1984, 33, 143–158. [Google Scholar] [CrossRef]
- Montaruli, M.F.; Di Lizia, P.; Cordelli, E.; Ma, H.; Siminski, J. A stochastic approach to detect fragmentation epoch from a single fragment orbit determination. Adv. Space Res. 2023, 72, 3713–3733. [Google Scholar] [CrossRef]
- Letizia, F.; Colombo, C.; Lewis, H.G. Analytical Model for the Propagation of Small-Debris-Object Clouds after Fragmentations. J. Guid. Control Dyn. 2015, 38, 1478–1491. [Google Scholar] [CrossRef]
- Muciaccia, A.; Facchini, L.; Montaruli, M.F.; Purpura, G.; Detomaso, R.; Colombo, C.; Massari, M.; Di Lizia, P.; Di Cecco, A.; Salotti, L.; et al. Radar observation and recontruction of Cosmos 1408 fragmentation. J. Space Saf. Eng. 2023, 11, 143–149. [Google Scholar] [CrossRef]
- Pardini, C.; Anselmo, L. Impact of the time span selected to calibrate the ballistic parameter on spacecraft re-entry predictions. Adv. Space Res. 2008, 41, 1100–1114. [Google Scholar] [CrossRef]
- Pardini, C.; Anselmo, L. Assessing the risk and the uncertainty affecting the uncontrolled re-entry of manmade space objects. J. Space Saf. Eng. 2018, 5, 46–62. [Google Scholar] [CrossRef]
- Tapley, B.D.; Schutz, B.E.; Born, G.H. Chapter 4—Fundamentals of Orbit Determination. In Statistical Orbit Determination; Tapley, B.D., Schutz, B.E., Born, G.H., Eds.; Academic Press: Burlington, NC, USA, 2004; pp. 159–284. [Google Scholar] [CrossRef]
- Siminski, J. Techniques for assessing space object cataloguing performance during design of surveillance systems. In Proceedings of the 6th International Conference on Astrodynamics Tools and Techniques (ICATT), Darmstadt, Germany, 14–17 March 2016; pp. 14–17. [Google Scholar]
- Montaruli, M.F.; Purpura, G.; Cipollone, R.; De Vittori, A.; Facchini, L.; Di Lizia, P.; Massari, M.; Peroni, M.; Panico, A.; Cecchini, A.; et al. An orbit determination software suite for Space Surveillance and Tracking applications. CEAS Space J. 2024. [Google Scholar] [CrossRef]
- Maruskin, J.M.; Scheeres, D.J.; Alfriend, K.T. Correlation of Optical Observations of Objects in Earth Orbit. J. Guid. Control Dyn. 2009, 32, 194–209. [Google Scholar] [CrossRef]
- Pastor, A.; Escribano, G.; Sanjurjo-Rivo, M.; Escobar, D. Satellite maneuver detection and estimation with optical survey observations. J. Astronaut. Sci. 2022, 69, 879–917. [Google Scholar] [CrossRef]
- De Vittori, A.; Cipollone, R.; Di Lizia, P.; Massari, M. Real-time space object tracklet extraction from telescope survey images with machine learning. Astrodynamics 2022, 6, 205–218. [Google Scholar] [CrossRef]
- Cordelli, E.; Vananti, A.; Schildknecht, T. Analysis of laser ranges and angular measurements data fusion for space debris orbit determination. Adv. Space Res. 2020, 65, 419–434. [Google Scholar] [CrossRef]
- Cordelli, E.; Schlatter, P.; Lauber, P.; Schildknecht, T. Use of a night-tracking camera for characterization and orbit improvement of defunct spacecraft. arXiv 2019, arXiv:1903.00210. [Google Scholar]
- Reihs, B.; Vananti, A.; Schildknecht, T. A method for perturbed initial orbit determination and correlation of radar measurements. Adv. Space Res. 2020, 66, 426–443. [Google Scholar] [CrossRef]
- Reihs, B.; Vananti, A.; Schildknecht, T.; Siminski, J.; Flohrer, T. Application of attributables to the correlation of surveillance radar measurements. Acta Astronaut. 2021, 182, 399–415. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Rosebrock, J.; Carloni, C.; Budoni, M.; Klare, J. A Novel High-Precision Observation Mode for the Tracking and Imaging Radar TIRA—Principle and Performance Evaluation. In Proceedings of the 8th European Conference on Space Debris, Darmstadt, Germany, 20–23 April 2021; Volume 8. [Google Scholar]
- Muller, F. GRAVES Space Surveillance System: Life Extension and Upgrade Program. In Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017; Volume 7. [Google Scholar]
- Jouadé, A.; Barka, A. Massively Parallel Implementation of FETI-2LM Methods for the Simulation of the Sparse Receiving Array Evolution of the GRAVES Radar System for Space Surveillance and Tracking. IEEE Access 2019, 7, 128968–128979. [Google Scholar] [CrossRef]
- Gómez, R.C.; Besso, P.; Pinna, G.M.; Alessandrini, M.; Salmerón, J.M.; Prada, M.A.R. Initial operations of the breakthrough Spanish Space Surveillance and Tracking Radar (S3TSR) in the European Context. In Proceedings of the 1st NEO and Debris Detection Conference, Darmstadt, Germany, 22–24 January 2019; Volume 1. [Google Scholar]
- Wilden, H.; Bekhti, B.N.; Hoffmann, R.; Kirchner, C.; Kohlleppel, R.; Reising, C.; Brenner, A.; Eversberg, T. GESTRA—Recent Progress, Mode Design and Signal Processing. In Proceedings of the 2019 IEEE International Symposium on Phased Array System Technology (PAST), Waltham, MA, USA, 15–18 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- DLR. GESTRA—German Experimental Space Surveillance and Tracking Radar. Technical report, 58th session of the Scientific and Technical Subcommittee of UNCOPUOS. 2021. Available online: https://www.unoosa.org/documents/pdf/copuos/stsc/2021/tech-29E.pdf (accessed on 9 December 2023).
- Bianchi, G.; Naldi, G.; Fiocchi, F.; Di Lizia, P.; Bortolotti, C.; Mattana, A.; Maccaferri, A.; Magro, A.; Roma, M.; Schiaffino, M.; et al. A new concept of bi-static radar for space debris detection and monitoring. In Proceedings of the 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Mauritius, Mauritius, 7–8 October 2021. [Google Scholar] [CrossRef]
- Bianchi, G.; Montaruli, M.F.; Roma, M.; Mariotti, S.; Di Lizia, P.; Maccaferri, A.; Facchini, L.; Bortolotti, C.; Minghetti, R. A new concept of transmitting antenna on bi-static radar for space debris monitoring. In Proceedings of the 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Maldives, Maldives, 16–18 November 2022. [Google Scholar] [CrossRef]
- Losacco, M.; Di Lizia, P.; Massari, M.; Naldi, G.; Pupillo, G.; Bianchi, G.; Siminski, J. Initial orbit determination with the multibeam radar sensor BIRALES. Acta Astronaut. 2020, 167, 374–390. [Google Scholar] [CrossRef]
- Montaruli, M.F.; Facchini, L.; Lizia, P.D.; Massari, M.; Pupillo, G.; Bianchi, G.; Naldi, G. Adaptive track estimation on a radar array system for space surveillance. Acta Astronaut. 2022, 198, 111–123. [Google Scholar] [CrossRef]
- Montaruli, M.F.; Di Lizia, P.; Tebaldini, S.; Bianchi, G. Delta-k approach for space surveillance multireceiver radars. Astrodynamics 2024. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Van Trees, H.L. Arrays and Spatial Filters. In Optimum Array Processing; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2002. [Google Scholar] [CrossRef]
- Yanez, C.; Mercier, F.; Dolado, J.C. A Novel Initial Orbit Determination Algorithm from Doppler and Angular Observations. In Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017; Volume 7. [Google Scholar]
- Mahalanobis, P.C. On the generalized distance in statistics. Proc. Natl. Inst. Sci. India 1936, 2, 49–55. [Google Scholar]
- Montaruli, M.F. Multireceiver radar technologies for space surveillance and tracking. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 2023. Available online: https://hdl.handle.net/10589/196600 (accessed on 22 December 2023).
- Faraco, N.; Maestrini, M.; Di Lizia, P. Instance Segmentation for Feature Recognition on Noncooperative Resident Space Objects. J. Spacecr. Rocket. 2022, 59, 2160–2174. [Google Scholar] [CrossRef]
- Maestrini, M.; De Luca, M.A.; Di Lizia, P. Relative Navigation Strategy About Unknown and Uncooperative Targets. J. Guid. Control Dyn. 2023, 46, 1708–1725. [Google Scholar] [CrossRef]
- Torr, P.; Zisserman, A. MLESAC: A New Robust Estimator with Application to Estimating Image Geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Right on Track: Aeolus Reentry Map. European Space Agency. 2023. Available online: https://www.esa.int/ESA_Multimedia/Images/2023/08/Right_on_track_Aeolus_reentry_map (accessed on 22 December 2023).
- Space-Track. Space-Track Website. 2022. Available online: https://www.space-track.org/auth/login (accessed on 6 June 2022).
- International Laser Ranging Service. NASA. 2023. Available online: https://ilrs.gsfc.nasa.gov/ (accessed on 22 December 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Right Ascension [Degree] | Declination [Degree] |
|---|---|
| 350.85 | 58.82 |
| a [km] | e | i [Degree] | [Degree] | [Degree] | [Degree] |
|---|---|---|---|---|---|
| 6607.9 | 2.4 × | 96.6 | 213.5 | 258.1 | 145.5 |
| Angular RMSE [degree] | 4.388 | 2.079 |
| Time difference [s] | 1.343 | 1.343 |
| Norad ID | International Designator | Number of Transits Analyzed | |
|---|---|---|---|
| CRYOSAT 2 | 36508 | 2010-013A | 2 |
| SARAL | 39086 | 2013-009A | 4 |
| JASON 3 | 41240 | 2016-002A | 6 |
| COSMOS 2517 | 41579 | 2016-034A | 1 |
| HAIYANG 2C | 46469 | 2020-066A | 6 |
| SENTINEL-6 | 46984 | 2020-086A | 4 |
| HAIYANG 2D | 48621 | 2021-043A | 6 |
| 25% | 50% | 75% | |
| Cataloged | |||
| [degree] | 5.6 | 8.7 | 1.3 |
| [degree] | 9.3 | 1.3 | 1.6 |
| Uncatalogued | |||
| [degree] | 5.3 | 8.7 | 1.3 |
| [degree] | 9.7 | 1.3 | 1.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montaruli, M.F.; De Luca, M.A.; Massari, M.; Bianchi, G.; Magro, A. Operational Angular Track Reconstruction in Space Surveillance Radars through an Adaptive Beamforming Approach. Aerospace 2024, 11, 451. https://doi.org/10.3390/aerospace11060451
Montaruli MF, De Luca MA, Massari M, Bianchi G, Magro A. Operational Angular Track Reconstruction in Space Surveillance Radars through an Adaptive Beamforming Approach. Aerospace. 2024; 11(6):451. https://doi.org/10.3390/aerospace11060451
Chicago/Turabian StyleMontaruli, Marco Felice, Maria Alessandra De Luca, Mauro Massari, Germano Bianchi, and Alessio Magro. 2024. "Operational Angular Track Reconstruction in Space Surveillance Radars through an Adaptive Beamforming Approach" Aerospace 11, no. 6: 451. https://doi.org/10.3390/aerospace11060451
APA StyleMontaruli, M. F., De Luca, M. A., Massari, M., Bianchi, G., & Magro, A. (2024). Operational Angular Track Reconstruction in Space Surveillance Radars through an Adaptive Beamforming Approach. Aerospace, 11(6), 451. https://doi.org/10.3390/aerospace11060451