



What Do You Need? Information Requirements and Task Analysis of (Future) Advanced Air Mobility Pilots in the Emergency Medical Service


Abstract
1. Introduction
2. Existing Research
2.1. HMI Design Aspects for Small Aircraft
2.2. Role of Head-Up-Displays and Augmented Reality in Modern Aircraft
2.3. Roles of Humans, Systems, and Automation in Modern Aircraft HMI
3. Studies
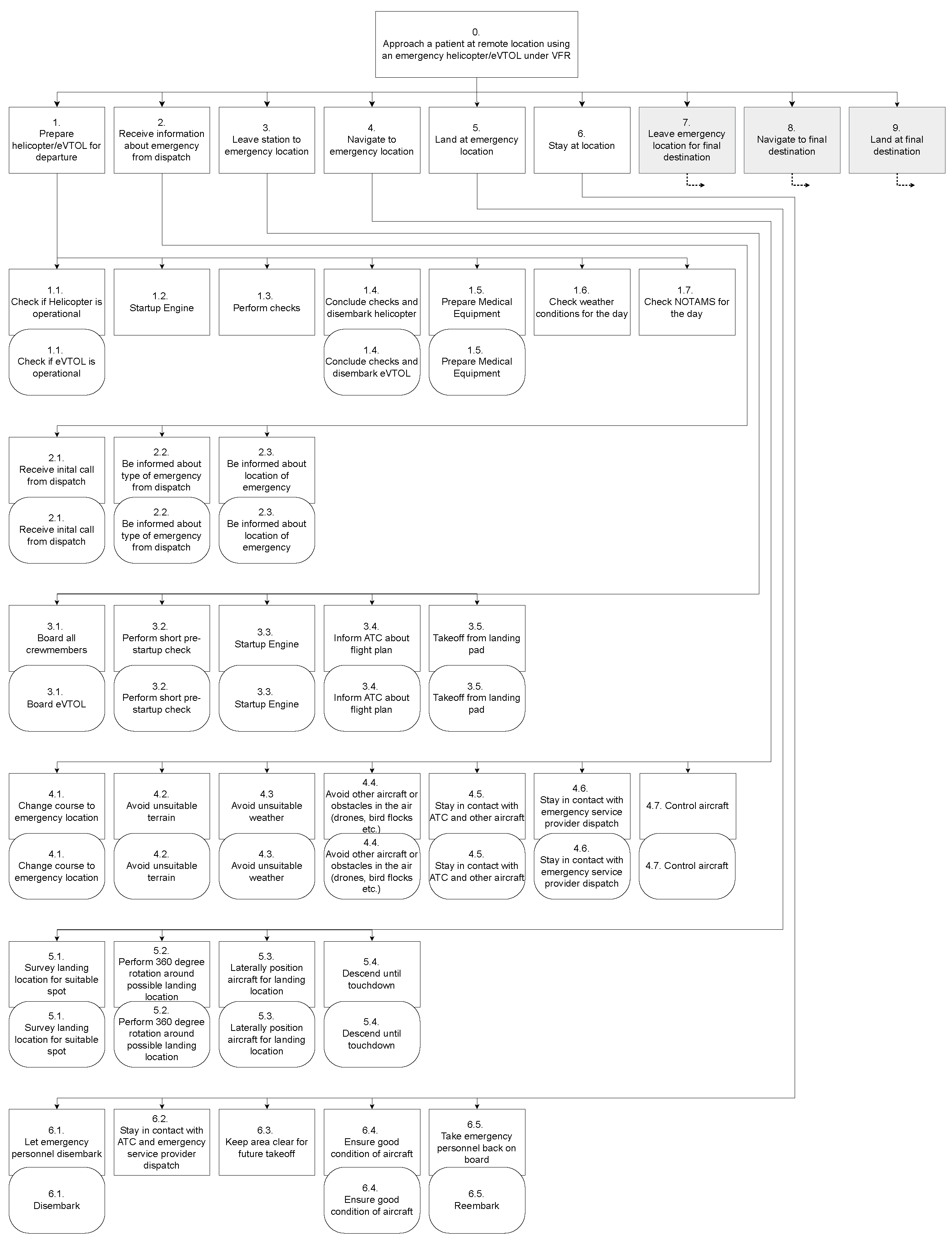
3.1. Study 1: Hierarchical Task Analysis—HTA
3.1.1. Method
3.1.2. Results
3.1.3. Discussion
3.2. Study 2: Interviews
3.2.1. Sample
3.2.2. Method
- General comments and wishes for current HMI components;
- Weather information;
- Navigation information;
- Energy state information;
- Information about the destination;
- Information helpful during take-off;
- Information helpful during landing;
- Airspace information;
- Potential of AR within the mission;
- Comments on current HUD systems;
- Communication exchange between Pilot and Helicopter Emergency Medical Services Technical Crew Members (HEMS TC).
3.2.3. Data Analysis
3.2.4. Results
Early Knowledge
Tasks during the Flight
Information Processing
3.2.5. Discussion
Common Findings with Meinhardt et al.
Specific Findings for HEMS Operations
4. General Discussion
4.1. Relationship between HTA and SME Interviews
- Power availability is important during the take-off phase due to environmental and altitude conditions;
- Available range or flight time is constantly monitored, especially during the cruise flight (not so much during the take-off or landing);
- Aircraft configuration does not change substantially for landing (which is different from fixed-wing airplanes).
4.2. Information Needs and Tasks for Flying an SVO-Enabled eVTOL in HEMS
4.3. Guidelines for Information Design
4.3.1. Highlight System Limits
4.3.2. Analyze Abnormal or Problematic Trends
4.3.3. Make Status Easily Scannable
4.3.4. Translate Aircraft Status into Actionable Information
4.4. Limitations
4.5. Future Research
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AAM | Advanced Air Mobility |
| AR | Augmented Reality |
| ATC | Air Traffic Control |
| ATPL | Airline Transport Pilot License |
| DSS | Decision Support Systems |
| EFB | Electronic Flight Bag |
| FBW | Fly-by-Wire |
| FLI | First Limit Indicator |
| ECAM | Electronic Centralized Aircraft Monitoring |
| EMS | Emergency Medical Service |
| eVTOL | electric Vertical Take-Off and Landing system |
| GAMA | General Aviation Manufacturers Association |
| HEMS | Helicopter Emergency Medical Service |
| HEMS TC | Helicopter Emergency Medical Services Technical Crew Member |
| HMI | Human–Machine Interface |
| HTA | Hierarchical Task Analysis |
| HUD | Head-Up Display |
| IFR | Instrument Flight Rules |
| METAR | Meteorological Aerodrome Report |
| NGO | Non-Governmental Organization |
| NOTAM | Notice To Air Mission |
| PAV | Personal Aerial Vehicles |
| PFD | Primary Flight Display |
| SME | Subject Matter Expert |
| SVO | Simplified Vehicle Operations |
| UAM | Urban Air Mobility |
| UCD | User-Centered Design |
| UX | User Experience |
| VFR | Visual Flight Rules |
Appendix A. Relevant Skills from GAMA
- Aircraft Handling;
- Communication;
- Detect and Avoid;
- Navigation;
- Planning;
- Risk Management/Decision Making;
- Systems Management;
- Take-Offs and Landing.
Appendix B. Interview Questions for HEMS Pilots in Study 2
- General Questions
- –
- Which HMI components provide the most information you need for your mission?
- –
- Which HMI component do you need the least?
- –
- Which component do you wish you had, but have never had before?
- Weather
- –
- How is weather information displayed nowadays?
- –
- How would you like the weather information to be displayed?
- –
- An automated tool would retrieve the weather information itself, analyze, it and make the decision for GO/NO GO and display it: What do you think about this system? How would you like the information to be displayed?
- Navigation
- –
- How would you like the flight path to be displayed?
- –
- What are the challenges you face during low-altitude flight?
- –
- What information are you missing?
- –
- What information could help you better control your aircraft?
- Energy
- –
- If you have a critical battery capacity left on board during flight, how would you like this information to be displayed?
- –
- How would you like to have the energy consumption of your aircraft displayed during flight?
- –
- Would you check yourself if the amount of energy remaining matches your calculations before take-off and is enough to reach the destination?
- Destination
- –
- What would you like to know about the place you are flying to? How would you like this information to be displayed?
- –
- What do you think about a display with a digital map (similar to Google Maps) that shows not only the route but also all other external influencing factors (e.g., possible problems related to different wind directions or obstacles)?
- –
- What information about the surroundings are you missing in a busy airspace or with limited visibility? In what form and where should it be displayed?
- –
- In case of low battery level, what do you think about a tool that automatically calculates the distance and time to a reachable destination, as well as the amount of energy needed for that?
- Take-Off
- –
- What information should be presented to you before/when you take off?
- –
- How would you like to receive this information?
- –
- What do you think of a tab in a display that summarizes all the information needed to take off in one place?
- Landing
- –
- What information do you need before landing?
- –
- How do you monitor the sink rate, power margin, and speed?
- –
- What do you think of a system that monitors these values and orders a go around if they are exceeded?
- –
- What do you think of a tab in a display that summarizes all the information needed to land in one place?
- Airspace
- –
- How would you like information about possible oncoming traffic to be displayed?
- –
- How would you like to receive information about dangerous and prohibited areas as well as traffic?
- AR Glasses
- –
- AR refers to the interaction of digital and analog life. This could work, for example, via a pair of glasses. The user is not completely cut off from their normal environment. Rather, additional information about their surroundings is superimposed on the glasses. What do you think of AR glasses in executing your operation?
- –
- What information would you like to see displayed via AR glasses?
- –
- Do you want this information to be selectable or displayed all of the time?
- HUD
- –
- What do you think of the head-up display during the operation?
- –
- Which information would you like to be shown by the head-up display?
- –
- Do you want this information to be selectable or displayed all of the time?
- Communication Pilot - HEMS
- –
- What information do you need from the HEMS TC when performing your mission?
- –
- Could this information be provided by HMI and thus replace the HEMS TC (e.g., display)?
References
- Pons-Prats, J.; Živojinović, T.; Kuljanin, J. On the understanding of the current status of urban air mobility development and its future prospects: Commuting in a flying vehicle as a new paradigm. Transp. Res. Part Logist. Transp. Rev. 2022, 166, 102868. [Google Scholar] [CrossRef]
- Bacchini, A.; Cestino, E. Electric VTOL Configurations Comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- EASA. Second Publication of Means of Compliance with the Special Condition VTOL: MOC-2 SC-VTOL. Available online: https://www.easa.europa.eu/en/downloads/137443/en (accessed on 28 May 2023).
- Vempati, L.; Geffard, M.; Anderegg, A. Assessing Human-Automation Role Challenges for Urban Air Mobility (UAM) Operations. In Proceedings of the 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 3–7 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Lombaerts, T.; Kaneshige, J.; Feary, M. Control Concepts for Simplified Vehicle Operations of a Quadrotor eVTOL Vehicle. In Proceedings of the AIAA AVIATION Forum, Online, 15–19 June 2020. [Google Scholar] [CrossRef]
- Favre, C. Fly-by-wire for commercial aircraft: The Airbus experience. Int. J. Control. 1994, 59, 139–157. [Google Scholar] [CrossRef]
- ISO 9241-210: 2010; Ergonomics of human-system interaction: Part 210: Human-centred design for interactive systems. ISO: Geneva, Switzerland, 2019.
- Goyal, R.; Cohen, A. Advanced Air Mobility: Opportunities and Challenges Deploying eVTOLs for Air Ambulance Service. Appl. Sci. 2022, 12, 1183. [Google Scholar] [CrossRef]
- Bruder, F.; Erd, A.; Benk, D.; Brütsch, L.; Zöllinger, F.; Schwierz, M.; Houzenga, E.; Himmelreich, P.; Maximilian, K.H.; Blume, H.; et al. Multicopter in the Rescue Service—Feasibility Study on the Application Potential of Multicopters as Emergency Doctor Shuttles; ADAC: Munich, Germany, 2020. [Google Scholar] [CrossRef]
- Janetzko, D.; Kacem, B. Application of a Hierarchical Task Analysis in the Design Process of an Emergency EVTOL HMI. In Proceedings of the DLRK 2022, Deutscher Luft- und Raumfahrtkongress, Dresden, Germany, 27 September 2022. [Google Scholar] [CrossRef]
- Kim, Y.W.; Lim, C.; Ji, Y.G.; Yoon, S.H.; Colley, M.; Meinhardt, L.M. The 2nd Workshop on User Experience in Urban Air Mobility: From Ground to Aerial Transportation. In Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–20 September 2022; pp. 168–171. [Google Scholar] [CrossRef]
- Jump, M.; Padfield, G.D.; White, M.D.; Floreano, D.; Fua, P.; Zufferey, J.C.; Schill, F.; Siegwart, R.; Bouabdallah, S.; Decker, M.; et al. myCopter: Enabling Technologies for Personal Air Transport Systems. In Proceedings of the RAeS Rotorcraft Conference, London, UK, 15–16 June 2011; pp. 1–15. [Google Scholar]
- Schuchardt, B.I.; Lehmann, P.; Nieuwenhuizen, F.; Perfect, P. Deliverable D6.5: Final List of Desirable Features/Options for the PAV and Supporting Systems; DLR German Aerospace Center: Cologne, Germany, 2015. [Google Scholar]
- Lim, C.; Kim, Y.W.; Ji, Y.G.; Yoon, S.; Lee, S.C. Is This Flight Headed Downtown?: User Experience Considerations for Urban Air Mobility. In Proceedings of the CHI Conference on Human Factors in Computing Systems Extended Abstracts, New Orleans, LA, USA, 30 April–5 May 2022; Barbosa, S., Ed.; ACM Digital Library: New York, NY, USA, 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Kim, Y.W.; Lim, C.; Lee, S.C.; Yoon, S.H.; Ji, Y.G. The 1st Workshop on User Experience in Urban Air Mobility: Design considerations and issues. In Proceedings of the 13th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Leeds, UK, 9–14 September 2021; pp. 175–177. [Google Scholar] [CrossRef]
- Kim, Y.W.; Ji, Y.G.; Yoon, S.; Colley, M.; Meinhardt, L.M. The 3rd Workshop on User Experience in Urban Air Mobility: What Could We Learn From AutomotiveUI? In Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ingolstadt, Germany, 18–22 September 2023; ACM Digital Library: New York, NY, USA, 2023; pp. 252–255. [Google Scholar] [CrossRef]
- Meinhardt, L.M.; Colley, M.; Faßbender, A.; Rukzio, E. Stairway to Heaven: A Demonstration of Different Trajectories and Weather Conditions in Automated Urban Air Mobility. In Adjunct Proceedings of the 15th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ingolstadt, Germany, 18–22 September 2023; ACM Digital Library: New York, NY, USA, 2023; pp. 311–313. [Google Scholar] [CrossRef]
- Meinhardt, L.M.; Colley, M.; Faßbender, A.; Rietzler, M.; Rukzio, E. Up, Up and Away—Investigating Information Needs for Helicopter Pilots in future Urban Air Mobility. In Proceedings of the Extended Abstracts of the 2023 CHI Conference on Human Factors in Computing Systems, Hamburg, Germany, 23–28 April 2023; Schmidt, A., Väänänen, K., Goyal, T., Kristensson, P.O., Peters, A., Eds.; ACM Digital Library: New York, NY, USA, 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Nichol, R.J. Airline Head-Up Display Systems: Human Factors Considerations. Int. J. Econ. Manag. Sci. 2015, 4, 1000248. [Google Scholar] [CrossRef]
- Blundell, J.; Collins, C.; Sears, R.; Plioutsias, T.; Huddlestone, J.; Harris, D.; Harrison, J.; Kershaw, A.; Harrison, P.; Lamb, P. Low-visibility commercial ground operations: An objective and subjective evaluation of a multimodal display. Aeronaut. J. 2023, 127, 581–603. [Google Scholar] [CrossRef]
- Colley, M.; Meinhardt, L.M.; Fassbender, A.; Rietzler, M.; Rukzio, E. Come Fly with Me—Investigating the Effects of Path Visualizations in Automated Urban Air Mobility. In Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies; ACM Digital Library: New York, NY, USA, 2023; Volume 7, pp. 1–23. [Google Scholar] [CrossRef]
- Hemm, R.V.; Duncan, D.; Stouffer, V.L. On-Demand Aviation Regulatory Obstacles and Resulting Research Roadmaps. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Reston, VI, USA, 13–17 June 2016. [Google Scholar] [CrossRef]
- Haslbeck, A.; Hoermann, H.J. Flying the Needles: Flight Deck Automation Erodes Fine-Motor Flying Skills Among Airline Pilots. Hum. Factors 2016, 58, 533–545. [Google Scholar] [CrossRef] [PubMed]
- Parnell, K.J.; Banks, V.A.; Wynne, R.A.; Stanton, N.A.; Plant, K.L. Human Factors Measures and Methods. In Human Factors on the Flight Deck; Plant, K.L., Parnell, K.J., Banks, V.A., Wynne, R.A., Stanton, N.A., Eds.; CRC Press: New York, NY, USA, 2023; pp. 21–39. [Google Scholar] [CrossRef]
- Stanton, N.A. Hierarchical task analysis: Developments, applications, and extensions. Appl. Ergon. 2006, 37, 55–79. [Google Scholar] [CrossRef] [PubMed]
- Stanton, N.A.; Salmon, P.M.; Walker, G.H.; Baber, C.; Jenkins, D.P. Human Factors Methods: A Practical Guide for Engineering and Design; Ashgate Pub. Co.: Aldershot, UK; Burlington, VT, USA, 2018. [Google Scholar]
- Scholl, H. Handbuch Luftrettung: Organisation, Einsatz, Taktik und Technik, 2nd, vollständig überarbeitete auflage ed.; S + K, Verlagsgesellschaft Stumpf + Kossendey mbH: Edewecht, Germany, 2018. [Google Scholar]
- ADAC Luftrettung. Tagesablauf. Available online: https://www.christoph-1.de/tagesablauf/ (accessed on 28 May 2023).
- Fachverband Leitstellen e.V. Handlungsempfehlung Leitfaden Luftrettung: Stand 02-07-2018. Available online: https://www.fvlst.de/wp-content/uploads/2021/02/handlungsempfehlung_leitfaden_luftrettung_stand_12-11-2018.pdf (accessed on 28 May 2023).
- Heli Rescue, e.V. Ablauf der Alarmierung eines Notarzthubschraubers. Available online: https://web.helirescue.at/alarmierung/ (accessed on 28 May 2023).
- Mischke, D. A Day in the Life of an EMS Pilot, Part 1. Available online: https://verticalmag.com/features/a-day-in-the-life-of-an-ems-pilot-part-1-html/ (accessed on 28 May 2023).
- Mischke, D. A Day in the Life of an EMS Pilot, Part 2. Available online: https://verticalmag.com/features/a-day-in-the-life-of-an-ems-pilot-part-2-html/ (accessed on 28 May 2023).
- O’Hare, D.; Stenhouse, N. Under the weather: An evaluation of different modes of presenting meteorological information for pilots. Appl. Ergon. 2009, 40, 688–693. [Google Scholar] [CrossRef] [PubMed]
- O’Hare, D.; Stenhouse, N. Redesigning a Graphic Weather Display for Pilots. Ergon. Des. Q. Hum. Factors Appl. 2008, 16, 11–15. [Google Scholar] [CrossRef]
- Hollnagel, E. Can We Ever Imagine How Work is Done? Hindsight 2017, 25, 10–13. [Google Scholar]
- Guest, G.; Bunce, A.; Johnson, L. How Many Interviews Are Enough? Field Methods 2006, 18, 59–82. [Google Scholar] [CrossRef]
- Romney, A.K.; Weller, S.C.; Batchelder, W.H. Culture as Consensus: A Theory of Culture and Informant Accuracy. Am. Anthropol. 1986, 88, 313–338. [Google Scholar] [CrossRef]
- Braun, V.; Clarke, V. Conceptual and design thinking for thematic analysis. Qual. Psychol. 2022, 9, 3–26. [Google Scholar] [CrossRef]
- General Aviation Manufacturers Association. A Rational Construct for Simplified Vehicle Operations (SVO): GAMA EPIC SVO Subcommittee Whitepaper. Available online: https://gama.aero/documents/svo-whitepaper-a-rationale-construct-for-simplified-vehicle-operations-svo-version-1-0-may2019/ (accessed on 28 May 2023).
- Braun, V.; Clarke, V. Using thematic analysis in psychology. Qual. Res. Psychol. 2006, 3, 77–101. [Google Scholar] [CrossRef]
- Condens Insights GmbH. Condens. Available online: https://condens.io/ (accessed on 12 December 2023).
- Curtis, M.T.; Jentsch, F.; Wise, J.A. Aviation Displays. In Human Factors in Aviation; Salas, E., Ed.; Academic Press/Elsevier: Amsterdam, The Netherlands; Boston, MA, USA, 2010; pp. 439–478. [Google Scholar] [CrossRef]
- Germanetti, S.A.M. Flight Indicator for a Helicopter. U.S. Patent 5915273, 13 July 1999. [Google Scholar]
- Parasuraman, R.; Sheridan, T.B.; Wickens, C.D. A model for types and levels of human interaction with automation. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2000, 30, 286–297. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D.; Li, H.; Santamaria, A.; Sebok, A.; Sarter, N.B. Stages and Levels of Automation: An Integrated Meta-analysis. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2010, 54, 389–393. [Google Scholar] [CrossRef]
- Richards, D.; Scott, S.; Furness, J.; Lamb, P.; Jordan, D.; Moore, D. Functional Symbology - Evaluation of task-specific Head-Up Display information for use on a commercial flight deck. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Reston, VI, USA, 13–17 June 2016. [Google Scholar] [CrossRef]
- Roessler, M.; Zuzan, O. EMS systems in Germany. Resuscitation 2006, 68, 45–49. [Google Scholar] [CrossRef]
- Schvaneveldt, R.W.; Beringer, D.B.; Lamonica, J.A. Priority and Organization of Information Accessed by Pilots in Various Phases of Flight. Int. J. Aviat. Psychol. 2001, 11, 253–280. [Google Scholar] [CrossRef]
- Dollinger, D.; Marvakov, V.A.; Holzapfel, F. Increasing Operator Situational Awareness During Transition Procedures for Fixed-Wing VTOL UAV Operations. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VI, USA, 11–15 January 2021. [Google Scholar] [CrossRef]
- Dollinger, D.; Reiss, P.; Angelov, J.; Löbl, D.; Holzapfel, F. Control Inceptor Design for Onboard Piloted Transition VTOL Aircraft Considering Simplified Vehicle Operation. In Proceedings of the AIAA Scitech 2021 Forum, Reston, VI, USA, 11–15 January 2021. [Google Scholar] [CrossRef]
- Bhardwaj, P.; Raab, S.A.; Zhang, J.; Holzapfel, F. Thrust command based Integrated Reference Model with Envelope Protections for Tilt-rotor VTOL Transition UAV. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Manzey, D.; Reichenbach, J.; Onnasch, L. Human Performance Consequences of Automated Decision Aids. J. Cogn. Eng. Decis. Mak. 2012, 6, 57–87. [Google Scholar] [CrossRef]
- Parasuraman, R.; Manzey, D.H. Complacency and bias in human use of automation: An attentional integration. Hum. Factors 2010, 52, 381–410. [Google Scholar] [CrossRef] [PubMed]
- Wright, S.; O’Hare, D. Can a glass cockpit display help (or hinder) performance of novices in simulated flight training? Appl. Ergon. 2015, 47, 292–299. [Google Scholar] [CrossRef] [PubMed]
- Kirwan, B. A Guide to Practical Human Reliability Assessment; Taylor & Francis: Boca Raton, FL, USA, 1994. [Google Scholar]

{kind=link}
| ID | Age | Experience [Years] | Total Flight Hours | Months since Last Active (HEMS) Mission | Role |
|---|---|---|---|---|---|
| 1 | 26 | 5.5 | 960 | 0 | Pilot |
| 2 | 53 | 22 | 5100 | 180 | Instructor |
| 3 | 27 | 5 | 80 | 0 | Pilot |
| 4 | 25 | 4 | 900 | 0 | Pilot |
| 5 | 50 | 26 | 7000 | 0 | Pilot |
| 6 | 20 | 1 | 10 | 0 | Pilot |
| 7 | 27 | 10 | - | 2 | Mountain Rescue Crew Member |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Janetzko, D.; Kacem, B. What Do You Need? Information Requirements and Task Analysis of (Future) Advanced Air Mobility Pilots in the Emergency Medical Service. Aerospace 2024, 11, 197. https://doi.org/10.3390/aerospace11030197
Janetzko D, Kacem B. What Do You Need? Information Requirements and Task Analysis of (Future) Advanced Air Mobility Pilots in the Emergency Medical Service. Aerospace. 2024; 11(3):197. https://doi.org/10.3390/aerospace11030197
Chicago/Turabian StyleJanetzko, Dominik, and Bacem Kacem. 2024. "What Do You Need? Information Requirements and Task Analysis of (Future) Advanced Air Mobility Pilots in the Emergency Medical Service" Aerospace 11, no. 3: 197. https://doi.org/10.3390/aerospace11030197
APA StyleJanetzko, D., & Kacem, B. (2024). What Do You Need? Information Requirements and Task Analysis of (Future) Advanced Air Mobility Pilots in the Emergency Medical Service. Aerospace, 11(3), 197. https://doi.org/10.3390/aerospace11030197