
Modelling of Cryopumps for Space Electric Propulsion Usage

Abstract
1. Introduction
2. DLR Electric Propulsion Test Facility Göttingen
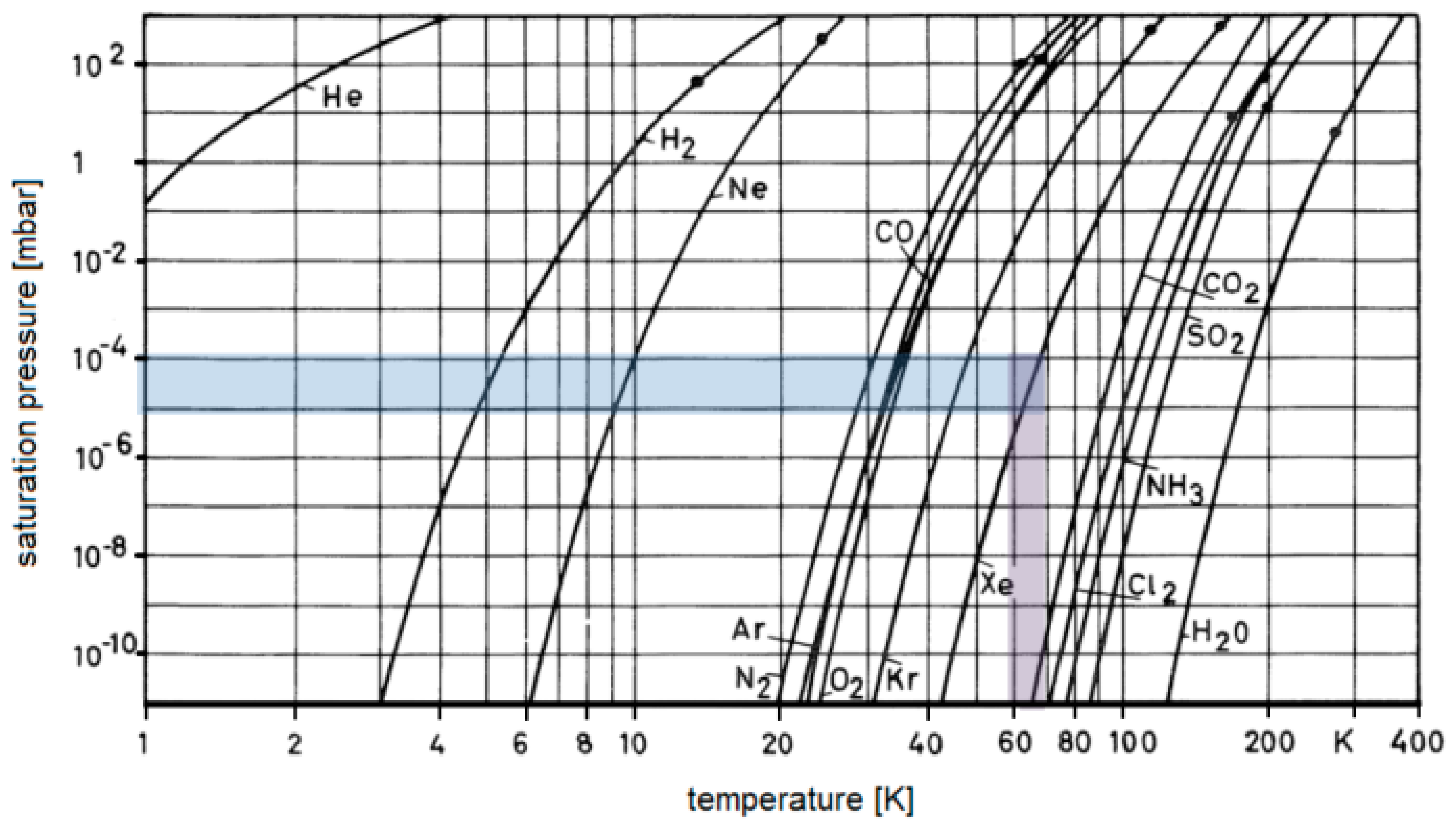
3. Cryopump Basics
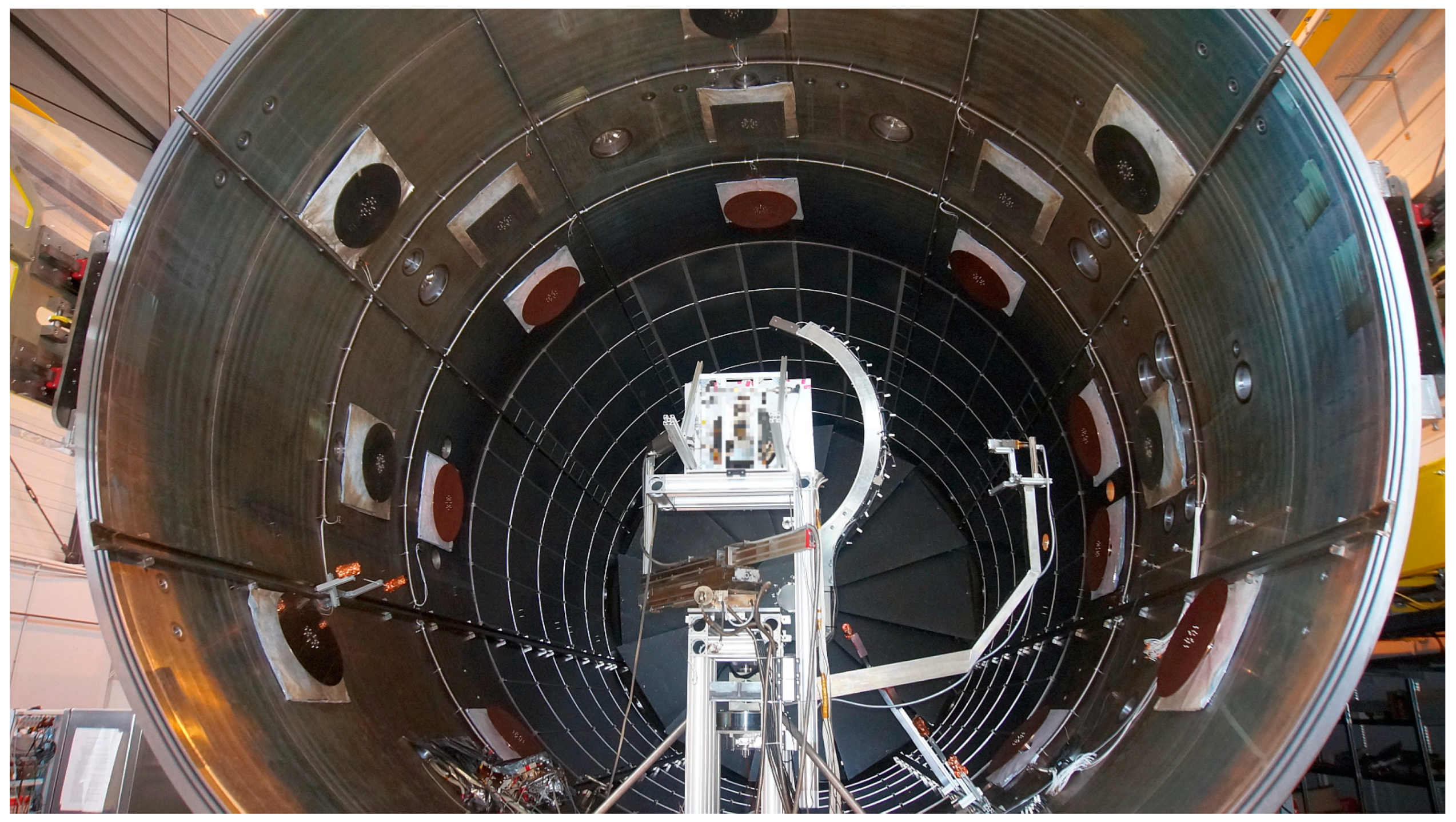
4. DLR STG-ET Pumping System
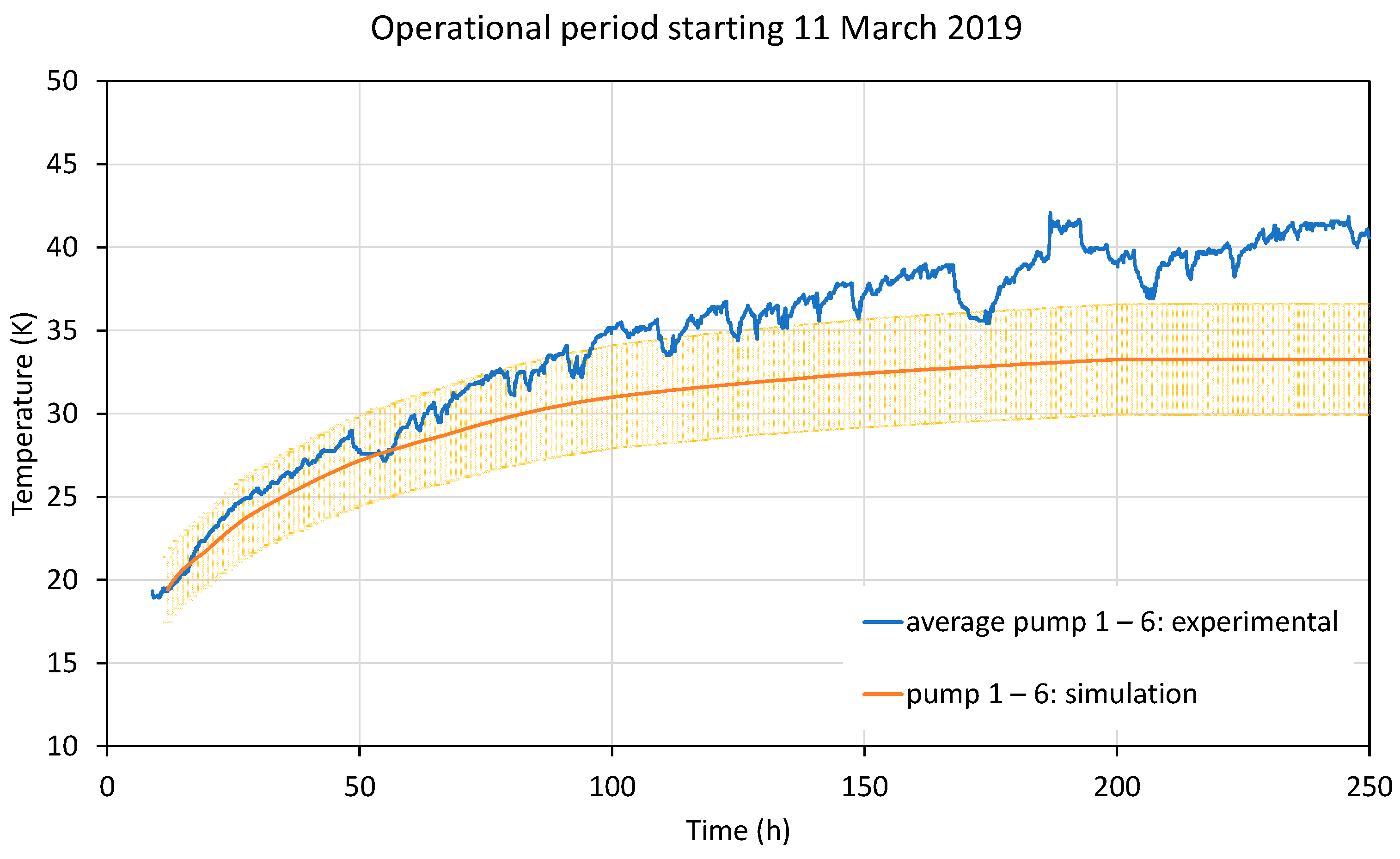
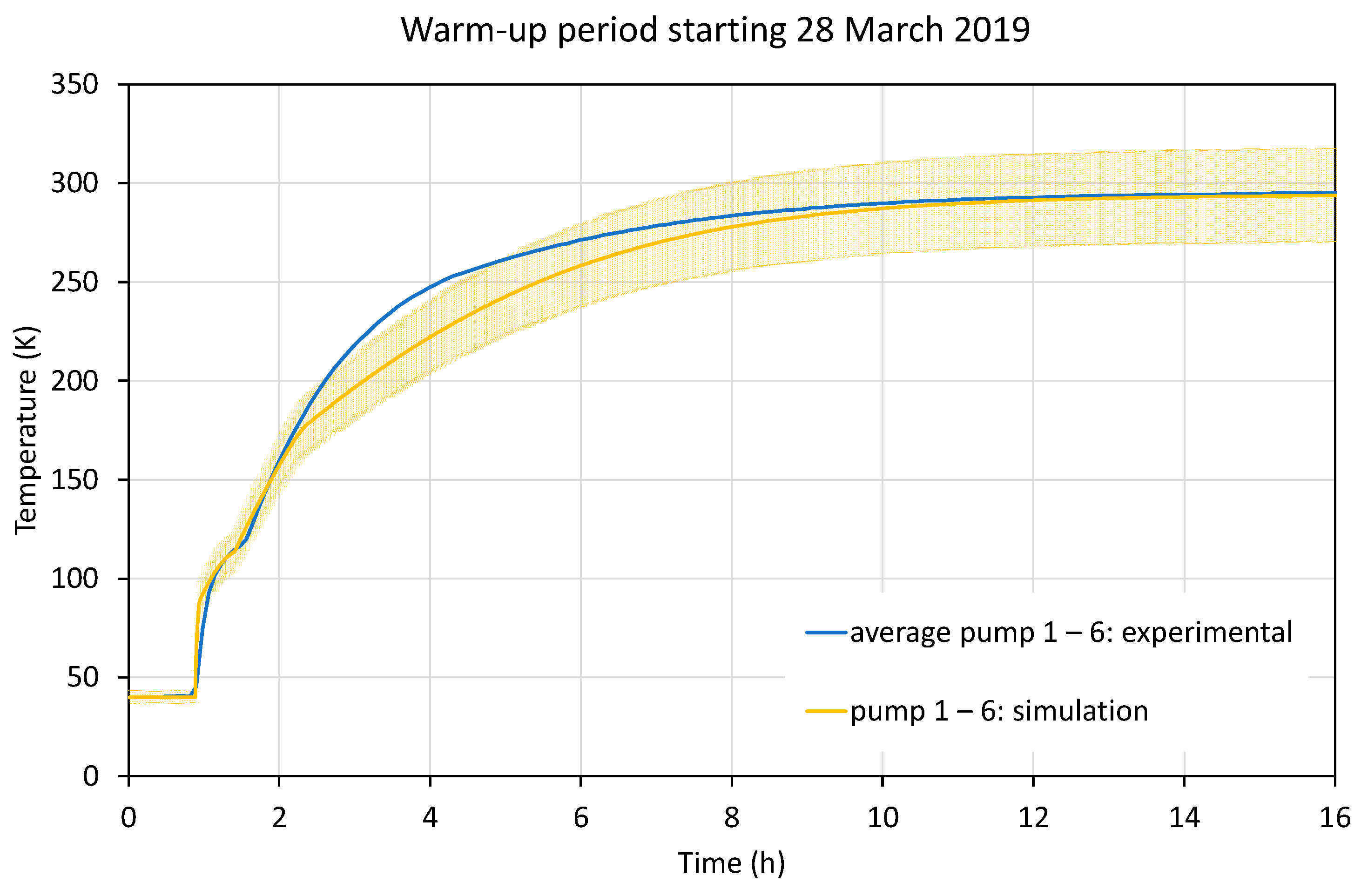
- Pumps 1–6: 6 round plates of 0.5 m diameter
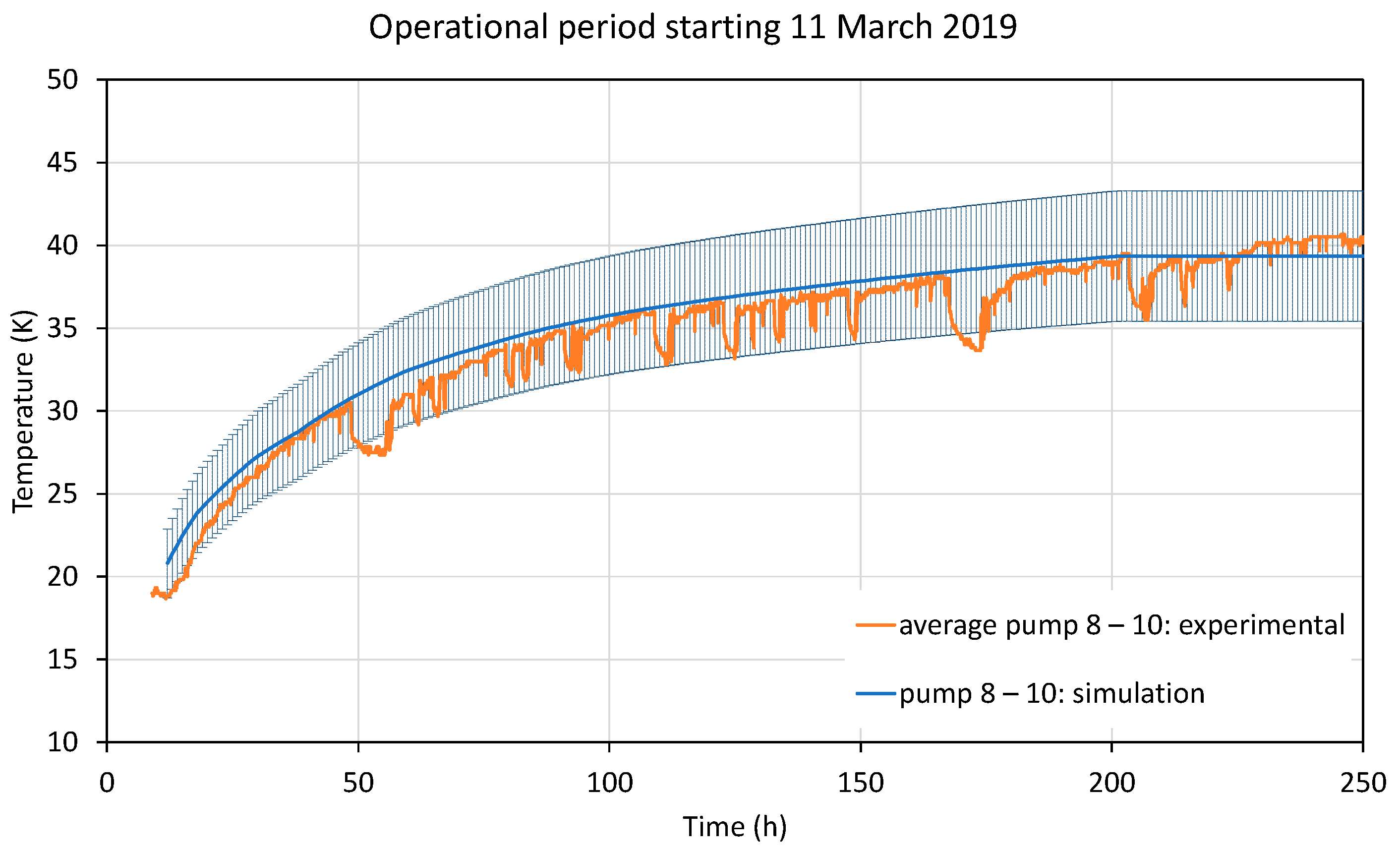
- Pumps 8–10: 3 square plates of 0.5 m × 0.5 m (pumps in place since chamber built)
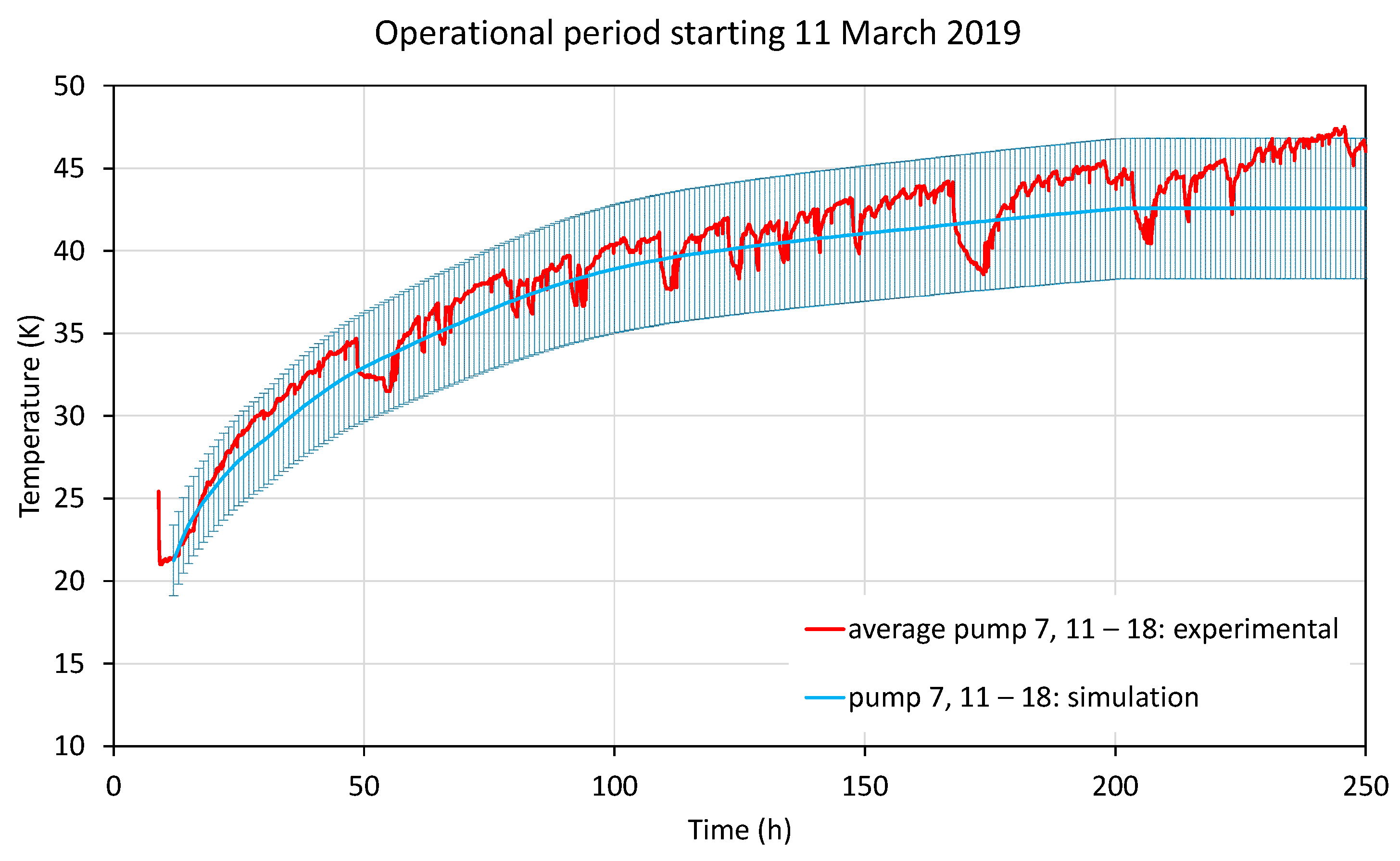
- Pumps 7, 11–18: 9 round plates of 0.6 m diameter
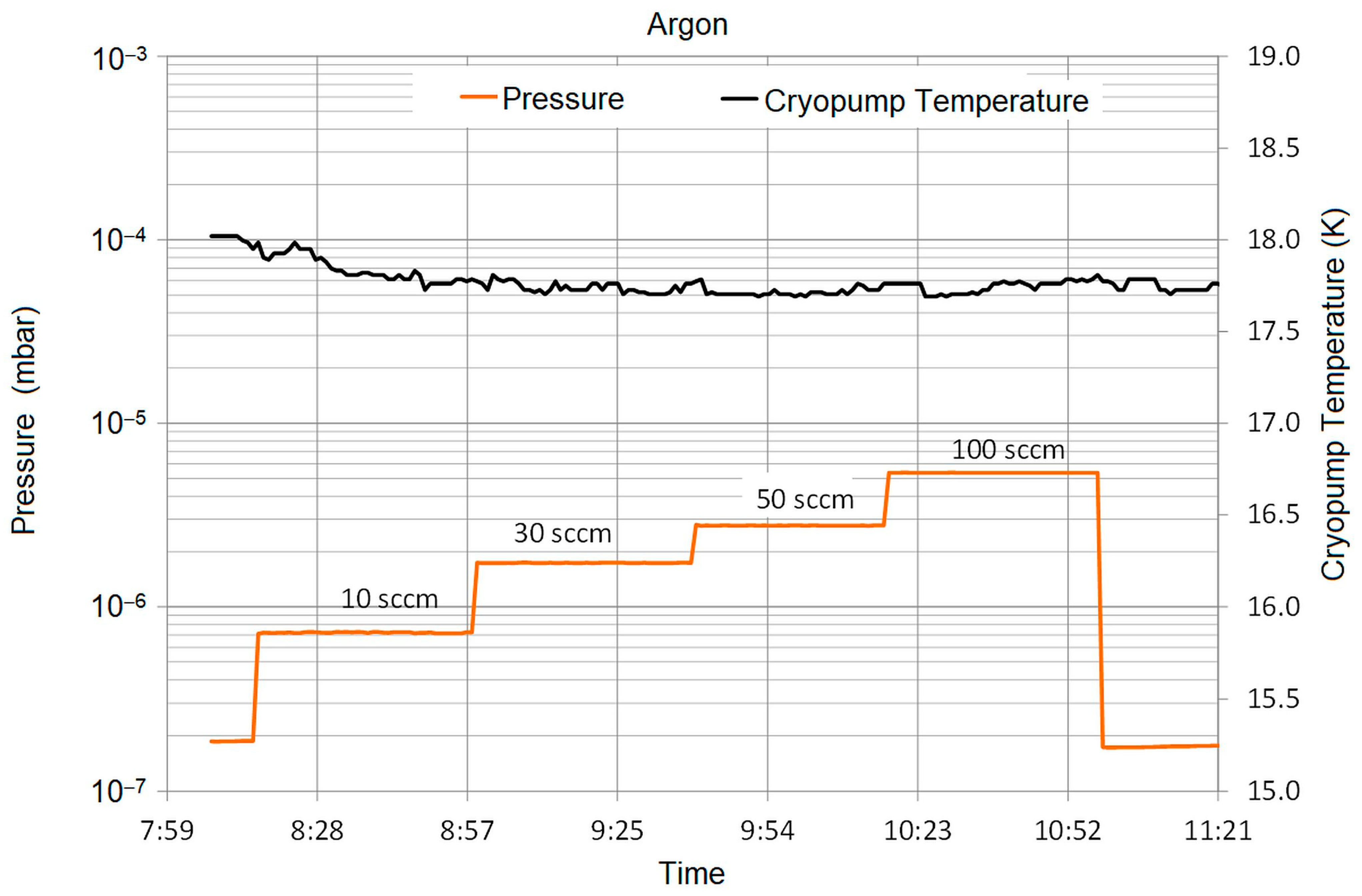
5. Pumping Speed Measurement
Pumping Speed Measurement for Xenon, Krypton, and Argon
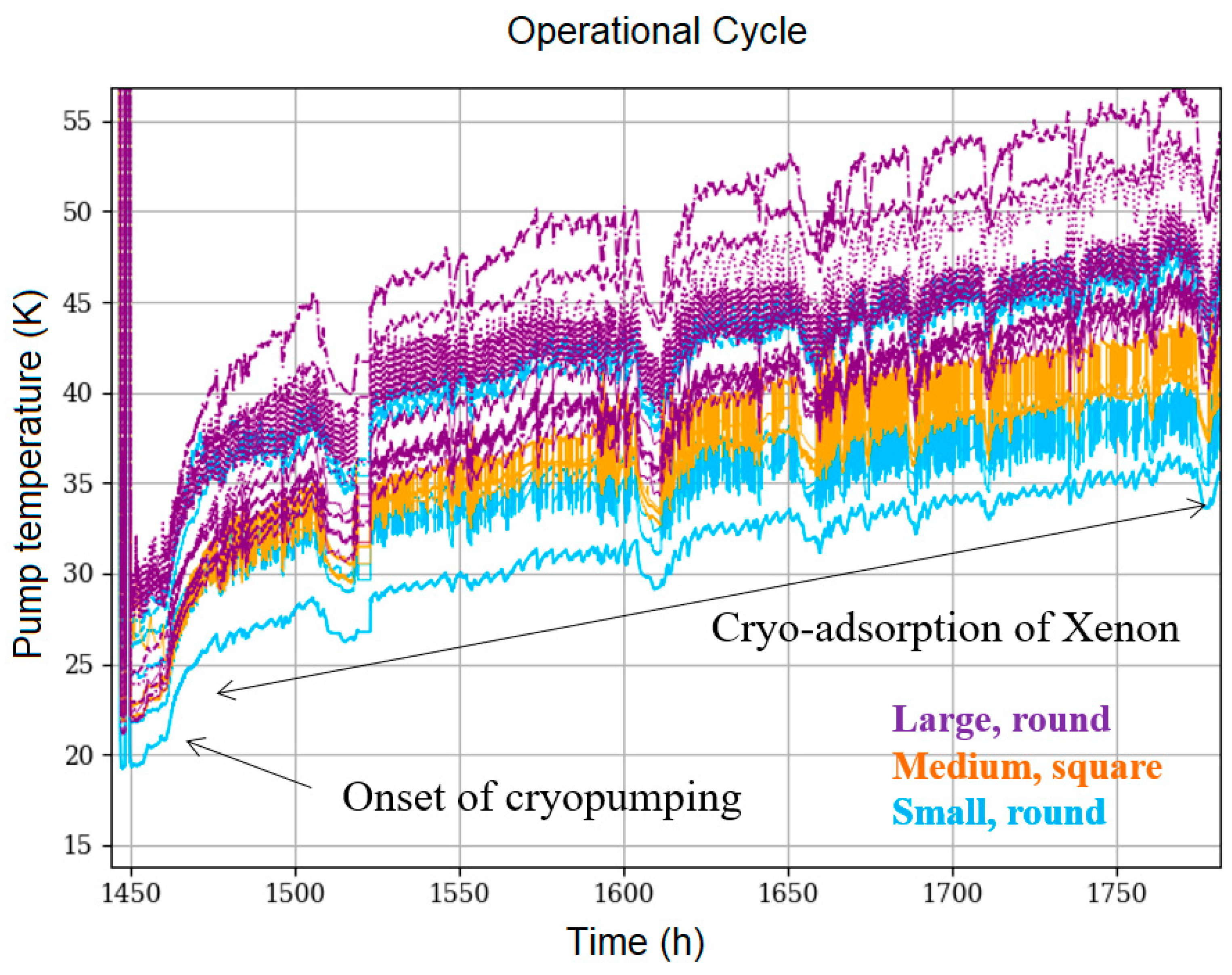
6. Cryopump Operation Analysis
7. Cryopump Modelling
7.1. Cryopump Head Cooling Capacity
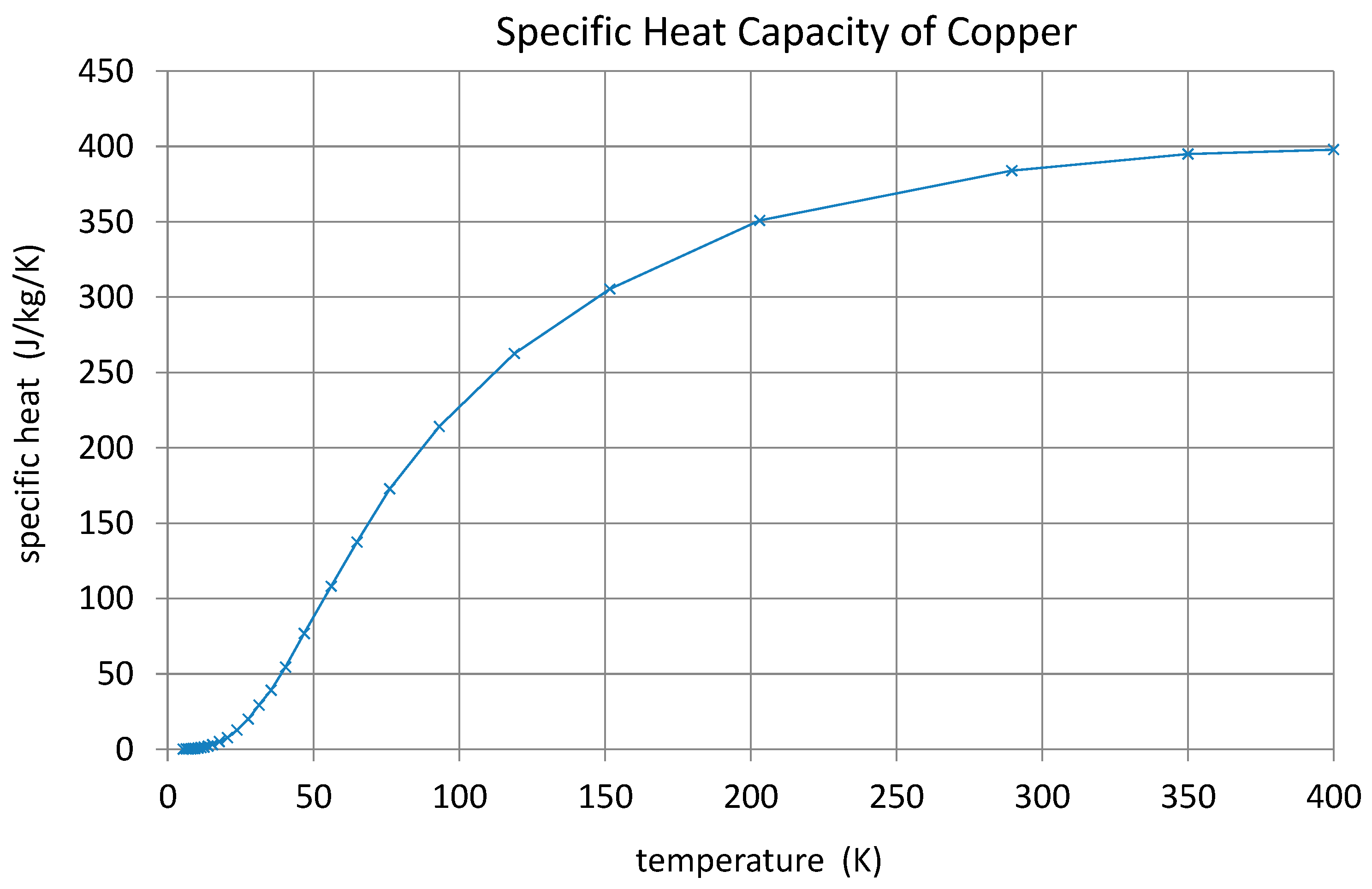
7.2. Cold Plate Material Properties
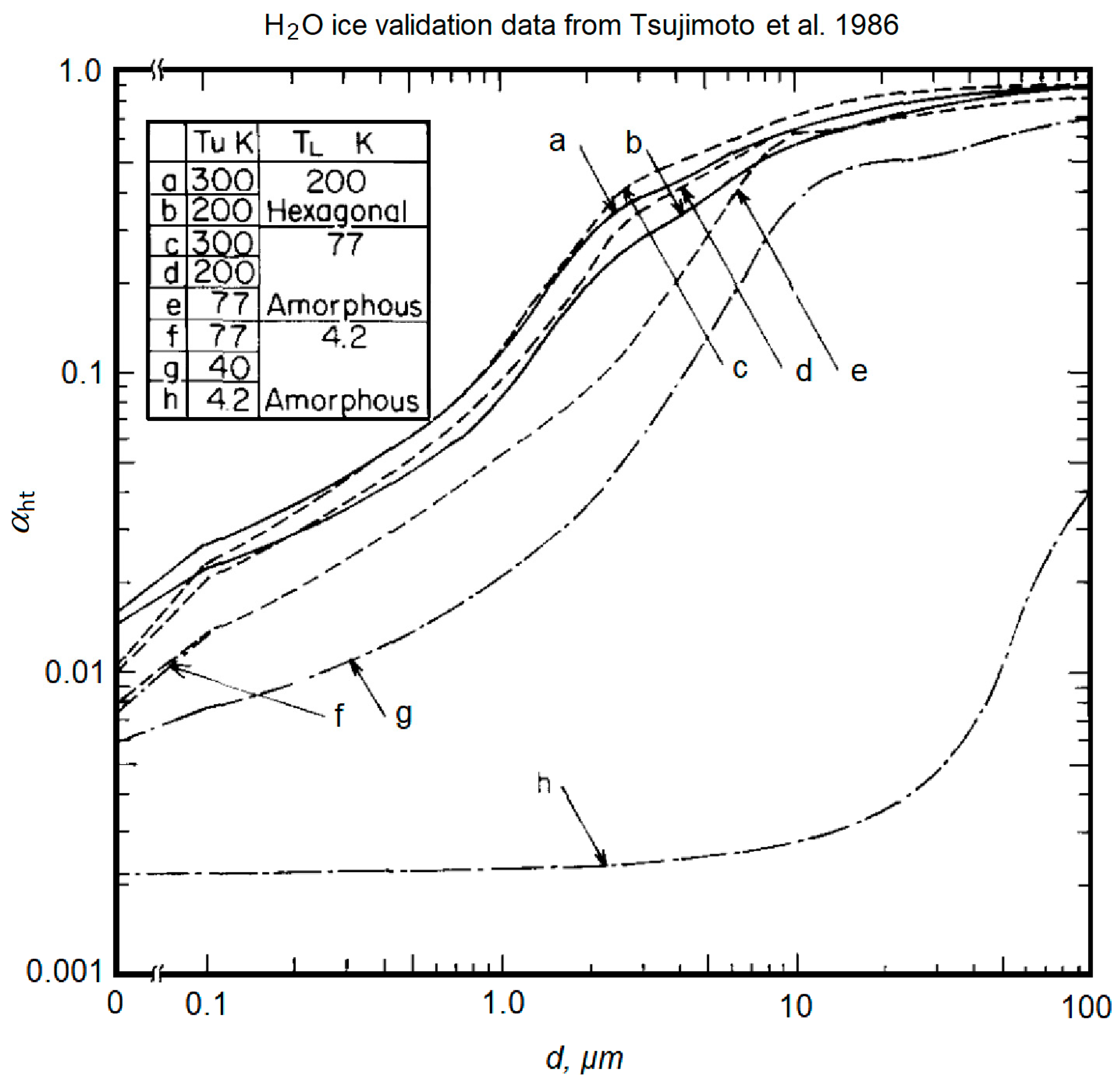
7.3. Water Ice Properties
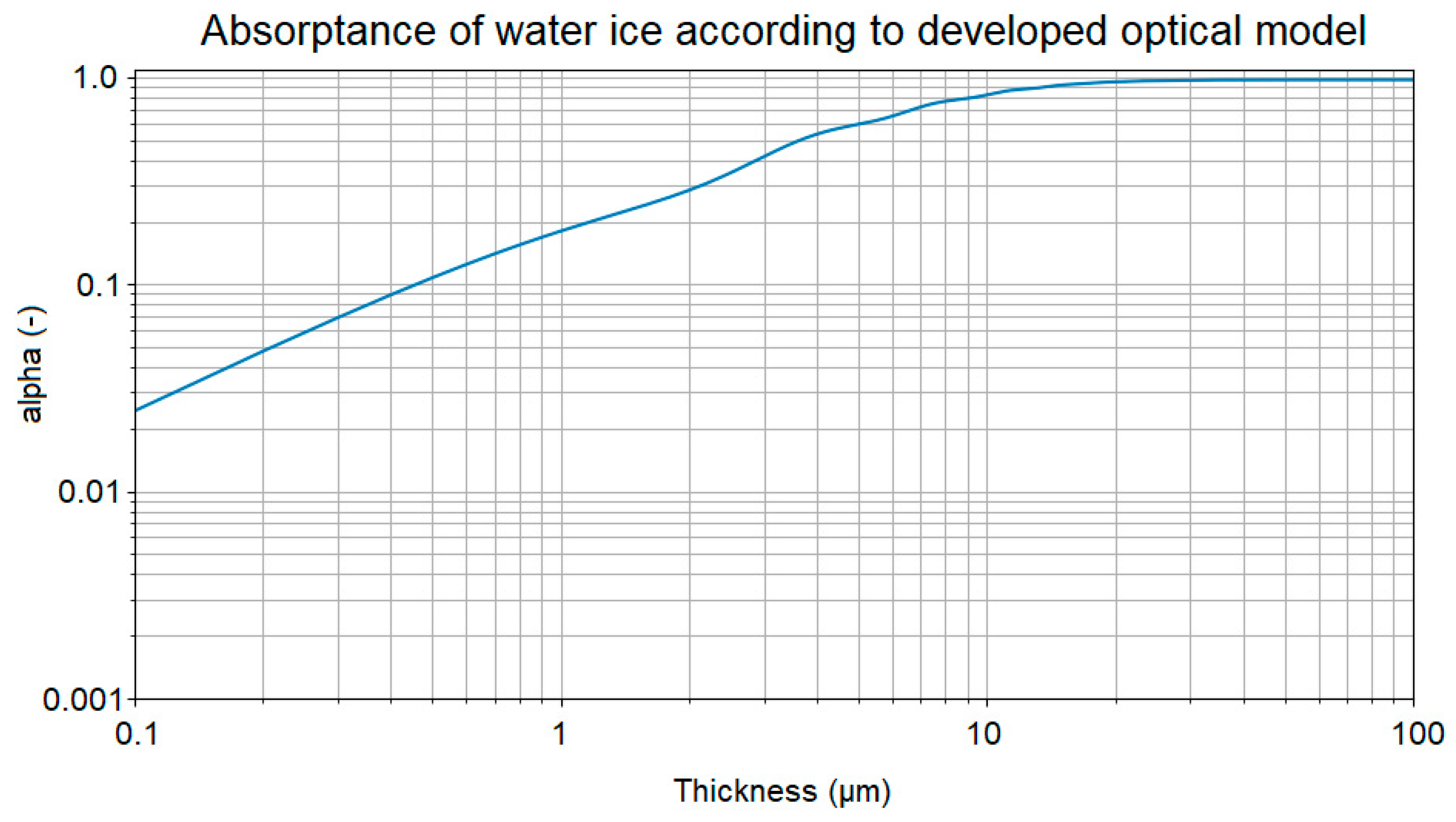
7.4. Ice Absorptance Profile Similarity Analysis
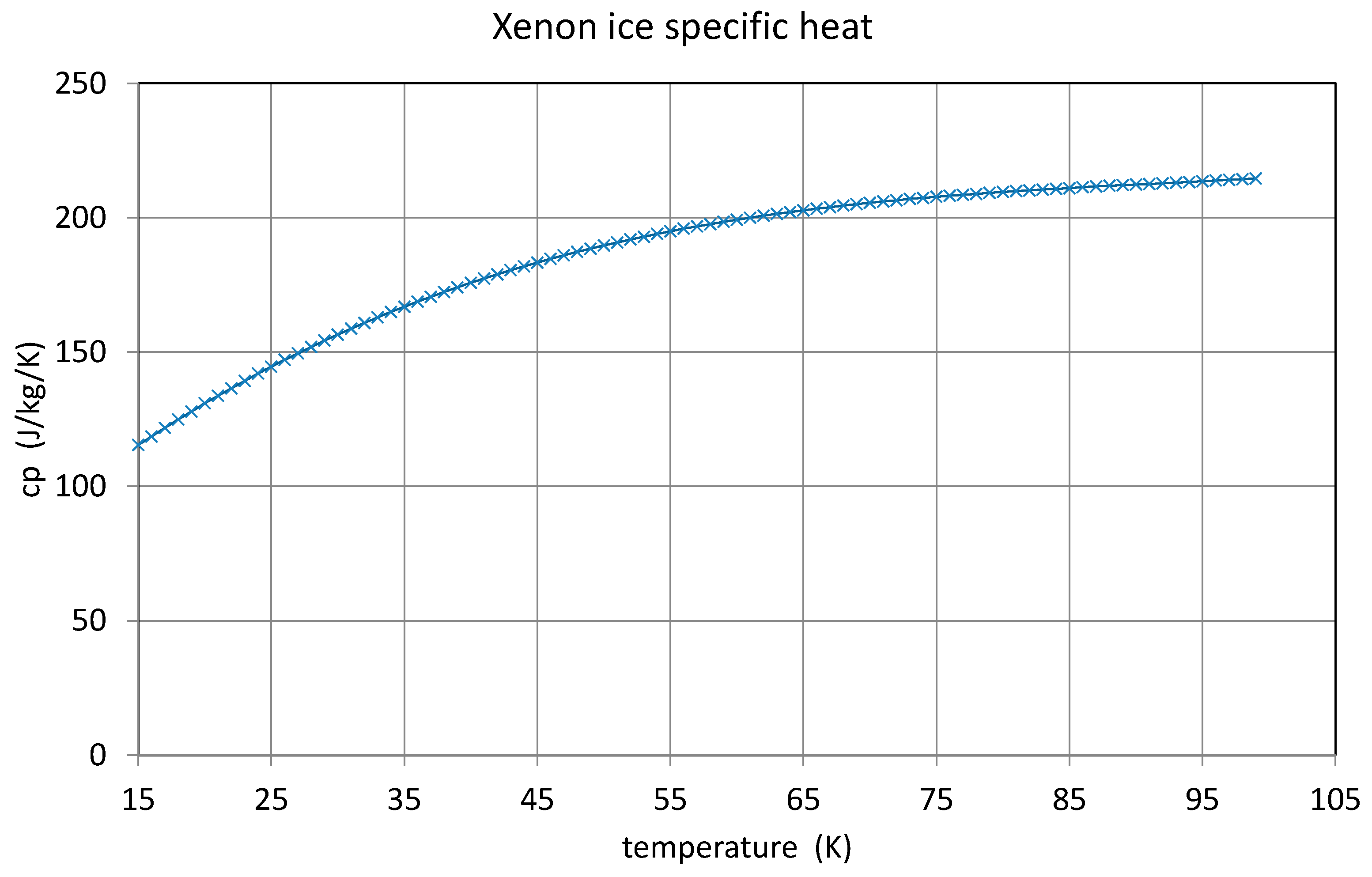
7.5. Xenon Ice Properties
7.6. Model for Operation Simulation
8. Comparison of Data and Model
8.1. Data Set
8.2. Modelling Operation
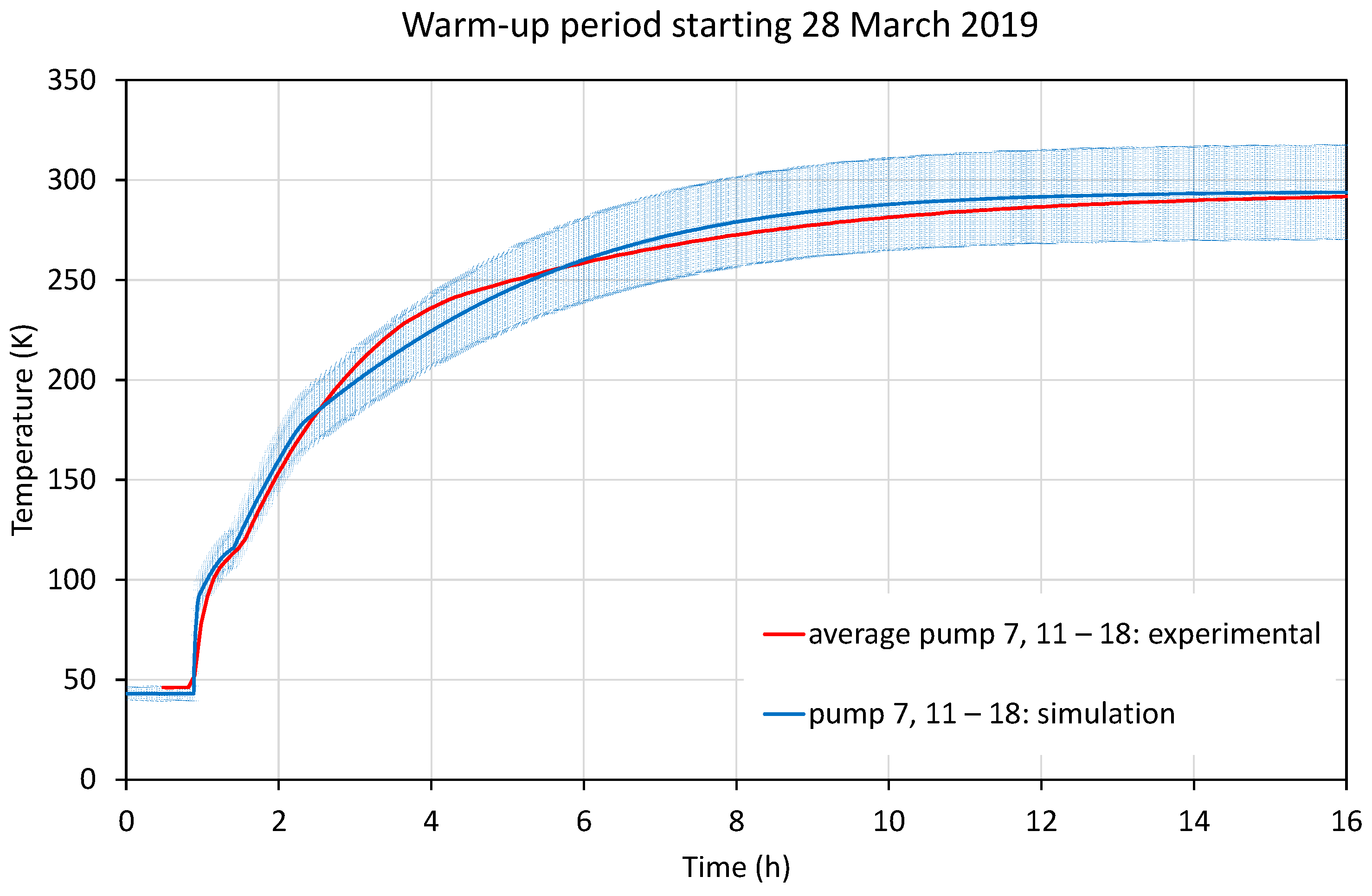
8.3. Modelling Warm-Up
8.4. Modelling the Impact of Water on Warm-Up Behaviour
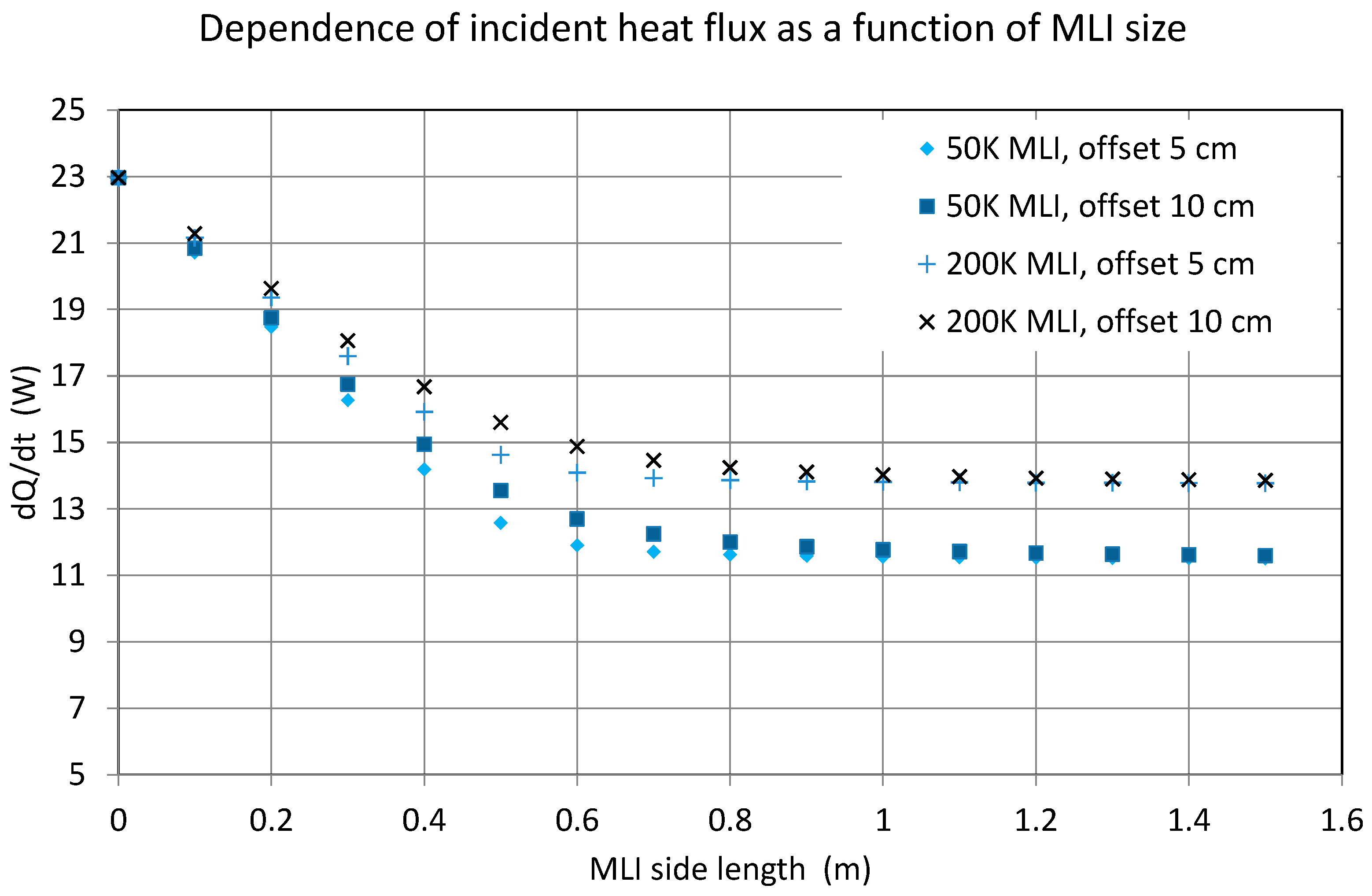
8.5. MLI Size Recommendations
9. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| EP | Electric Propulsion |
| LN2 | Liquid Nitrogen |
| MLI | Multi-layer Insulation |
| RIT | Radiofrequency Ion Thruster |
| sccm | standard cubic centimeters per second |
| STG-ET | Simulationsanlage Treibstahlen Göttingen—Elektrische Triebwerke |
| (High Vacuum Plume Test Facility Göttingen—Electric Thrusters) | |
| THR | Thruster |
References
- Brophy, J.R. Perspectives on the success of electric propulsion. J. Electr. Propuls. 2022, 1, 9. [Google Scholar] [CrossRef]
- Dankanich, J.W.; Woodcock, G.R. Electric Propulsion Performance from Geo-transfer to Geosynchronous Orbits. Paper IEPC-2007-287. In Proceedings of the 30th International Electric Propulsion Conference, Florence, Italy, 17–20 September 2007. [Google Scholar]
- Kreiner, K. The future of satellite propulsion. In Proceedings of the Presentation, EUCASS 2013, 5th European Conference for Aeronautics and Space Sciences, Munich, Germany, 1–5 July 2013. [Google Scholar]
- Biagioni, L.; Kim, V.; Nicolini, D.; Semenkin, A.V.; Wallace, N.C. Basic Issues in Electric Propulsion Testing and the Nees for International Standards. In Proceedings of the IEPC Paper IEPC-03-230, 28th International Electric Propulsion, Toulouse, France, 17–21 March 2003; Available online: https://electricrocket.org/IEPC/0230-0303iepc-full.pdf (accessed on 15 January 2024).
- Neumann, A.; Hannemann, K. Electric propulsion testing at DLR Göttingen: Facility and diagnostics. In Proceedings of the Presentation, Space Propulsion Conference 2014, Cologne, Germany, 19–22 May 2014. Paper Identification Number 2970582. [Google Scholar]
- Manzella, D.; Sarmiento, C.; Sankovic, J.; Haag, T. Performance Evaluation of the SPT-140; Report NASA/TM-97-206301 NASA Center for Aerospace Information: Linthicum Heights, MD, USA, 1997. [Google Scholar]
- Jovel, D.R.; Walker, M.L.R.; Herman, D. Review of High-Power Electrostatic and Electrothermal Electric Propulsion. J. Propuls. Power 2022, 38, 1051–1081. [Google Scholar] [CrossRef]
- Fazio, N.; Gabriel, S.B.; Golosnoy, I.O. Alternative propellants for gridded ion engines. In Proceedings of the Paper SP2018_00102, Space Propulsion Conference 2018, Seville, Spain, 14–18 May 2018. [Google Scholar]
- Viges, E.A.; Jorns, B.A.; Gallimore, A.D.; Sheehan, J.P. University of Michigan’s Upgraded Large Vacuum Test Facility. In Proceedings of the Paper IEPC-2019-653, 36th International Electric Propulsion Conference, Vienna, Austria, 15–20 September 2019. [Google Scholar]
- Neumann, A. STG-ET: DLR Electric Propulsion Test Facility. J. Large-Scale Res. Facil. 2018, 4, A134. [Google Scholar] [CrossRef]
- Goebel, D.M.; Katz, I. Fundamentals of Electric Propulsion: Ion and Hall Thrusters; JPL Space Science and Technology Series; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; ISBN 9780470429273. [Google Scholar]
- Doerner, R.; White, D.; Goebel, D.M. Sputtering Yield Measurements during Low Energy Xenon Plasma Bombardment. J. Appl. Phys. 2003, 93, 5816–5823. [Google Scholar] [CrossRef]
- Specs. Useful Information and Facts about Practice of Sputtering. Technical Report, Specs. 2023. Available online: https://www.specs-group.com/fileadmin/user_upload/products/technical-note/sputter-info.pdf (accessed on 15 January 2024).
- Lausberg, S. Vacuum challenges for ion thruster testing. In Proceedings of the Presentation, Space Propulsion 2018, Seville, Spain, 14–18 May 2018. [Google Scholar]
- Garner, C.E.; Polk, J.R.; Brophy, J.R.; Goodfellow, K. Methods for Cryopumping Xenon; AIAA Paper 96-3206; American Institute of Aeronautics and Astronautics, Inc.: Reston, VA, USA, 1996. [Google Scholar]
- Kohler, M.; Frick, U. Kryopumpen in der Weltraumforschung; German Flyer; HSR AG: Balzers, Liechtenstein, 2007. [Google Scholar]
- Neumann, A. Update on Diagnostics for DLR‘s Electric Propulsion Test Facility. Procedia Eng. 2017, 185, 47–52. Available online: www.sciencedirect.com (accessed on 15 January 2024). [CrossRef]
- Dankanich, J.W.; Walker, M.; Swiatek, M.W.; Yim, J.T. Recommended practice for pressure measurement and calculation of effective pumping speed in electric propulsion testing. J. Propuls. Power 2017, 33, 668–680. [Google Scholar] [CrossRef]
- Basics of Cryopumping. SHI Cryogenics Group. 2020. Available online: https://www.shicryogenics.com/wp-content/uploads/2020/09/Basics-of-Cryopumping-Booklet-English-4.18.pdf (accessed on 5 January 2024).
- Barnes, C. Cryopumping. In Proceedings of the 1968 Summer Study on Superconducting Devices and Accelerators, Brookhaven National Laboratory, Upton, NY, USA, 10 June–19 July 1968; p. 230. [Google Scholar]
- Perinić, G.; Vandoni, G.; Niinikoski, T. Introduction to Cryogenic Engineering. Presentation CERN, 5.-9.12.2005. Available online: https://www.slac.stanford.edu/econf/C0605091/present/CERN.PDF (accessed on 10 January 2024).
- Thomas, J.; Peterson, J.G.; Weisend, I.I. Cryogenic Safety; Springer: Cham, Switzerland, 2019; ISBN 978-3-030-16508-6. [Google Scholar] [CrossRef]
- Kitamura, S.; Miyazaki, K.; Hayakawa, Y.; Nakamura, Y. Xenon Ion Thruster Test Facility–Design and Operation; Paper IEPC1988-60; IEPC: Genève, Switzerland, 1988. [Google Scholar]
- Spektor, R. Analytical Pumping Speed Models for Electric Propulsion Vacuum Facilities. J. Propuls. Power 2021, 37, 391–399. [Google Scholar] [CrossRef]
- Marquardt, E.D.; Le, J.P.; Radebaugh, R. Cryogenic Material Properties Database. In Cryocoolers 11; Ross, R.G., Ed.; Springer: Boston, MA, USA, 2002. [Google Scholar] [CrossRef]
- Simon, N.J.; Drexler, E.S.; Reed, R.P. Properties of Copper and Copper Alloys at Cryogenic Temperatures; Final Report; Materials Science and Engineering Laboratory, National Institute of Standards and Technology: Boulder, CO, USA, 1992. [Google Scholar]
- Arblaster, J.W. Thermodynamic properties of copper. J. Phase Equilibria Diffus. 2015, 36, 422–444. [Google Scholar] [CrossRef]
- Haynes, W.M.; Lide, D.R.; Bruno, T.J. CRC Handbook of Chemistry and Physics: A Ready-Reference Book of Chemical and Physical Data, 97th ed.; CRC Press: Boca Raton, FL, USA, 2016–2017; Section 6. [Google Scholar]
- Poling, B.E.; Prausnitz, J.M.; O’Connell, J.P. Properties of Gases and Liquids, 5th ed.; McGraw-Hill Education: New York, NY, USA, 2001; Available online: https://www.accessengineeringlibrary.com/content/book/9780070116825 (accessed on 15 January 2024).
- Tsujimoto, S.; Konishi, A.; Kunitomo, T. Optical constants and thermal radiative properties of H2O cryodeposits. Cryogenics 1982, 22, 603–607. [Google Scholar] [CrossRef]
- Pepper, S.V. Absorption of Infrared Radiation by Ice Cryodeposits; NASA TN D5181; National Aeronautics and Space Administration: Washington, DC, USA, 1969. [Google Scholar]
- Liu, C.K. Degradation of Cold Optical Systems by Cryodeposition; Report for 1971 Independent Research Program, AD-756 772; Lockheed Missiles and Space Company: Palo Alto, CA, USA, 1972. [Google Scholar]
- Ferreira, A.G.M.; Lobo, L.Q. The sublimation of argon, krypton, and xenon. J. Chem. Thermodyn. 2008, 40, 1621–1626. [Google Scholar] [CrossRef]
- Packard, J.R.; Swenson, C.A. An experimental equation of state for solid xenon. J. Phys. Chem. Solids 1963, 24, 1405–1418. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature Range (K) | |
|---|---|
| 4.2–30 | |
| 30–50 | |
| 50–70 | |
| 70–100 | |
| 100–200 | |
| 200–298 | |
| 298–1358 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neumann, A.; Brchnelova, M. Modelling of Cryopumps for Space Electric Propulsion Usage. Aerospace 2024, 11, 177. https://doi.org/10.3390/aerospace11030177
Neumann A, Brchnelova M. Modelling of Cryopumps for Space Electric Propulsion Usage. Aerospace. 2024; 11(3):177. https://doi.org/10.3390/aerospace11030177
Chicago/Turabian StyleNeumann, Andreas, and Michaela Brchnelova. 2024. "Modelling of Cryopumps for Space Electric Propulsion Usage" Aerospace 11, no. 3: 177. https://doi.org/10.3390/aerospace11030177
APA StyleNeumann, A., & Brchnelova, M. (2024). Modelling of Cryopumps for Space Electric Propulsion Usage. Aerospace, 11(3), 177. https://doi.org/10.3390/aerospace11030177