1. Introduction
The aerodynamic shape of an aircraft significantly influences its performance, making aerodynamic shape design a critical component in aircraft development. With advancements in computational capabilities, aerodynamic shape optimization (ASO), which integrates computational fluid dynamics (CFD) technology with optimization algorithms, has become a fundamental method in contemporary aircraft design [
1,
2,
3,
4]. To establish an accurate physical model for flow field solutions, a comprehensive set of design variables is typically employed during the geometric shape parameterization stage to fully capture the geometric characteristics of the shape [
5]. However, this approach often results in a substantial increase in both the number of design variables and the associated computational costs. As the number of design variables increases, the dimensionality of the design space expands, complicating the optimization problem and reducing optimization efficiency [
6,
7,
8]. Therefore, achieving a balance between optimization effectiveness and computational cost reduction remains a major challenge in ASO.
To balance optimization efficiency and effectiveness in ASO, researchers have investigated several approaches, including surrogate modeling, dimensionality reduction, and variable screening techniques [
9,
10,
11,
12]. Surrogate models, such as polynomial response surfaces [
13], Kriging [
14], radial basis functions [
15], and neural networks [
16,
17], are often used to approximate complex CFD simulations, thereby reducing computational costs and enhancing optimization efficiency. However, due to their strong reliance on training data, these methods often encounter issues such as limited accuracy and poor generalizability, which pose significant challenges, especially in high-dimensional problems. In addition, dimensionality reduction techniques, such as Proper Orthogonal Decomposition (POD), Principal Component Analysis (PCA), and Self-Organizing Map(SOM, have been employed to project high-dimensional design spaces into lower-dimensional representations while preserving key features of the original design. This reduces the number of variables involved and improves computational efficiency [
18,
19,
20]. However, while dimensionality reduction can simplify the design space, it may also result in a loss of parameterization accuracy, which could hinder the achievement of truly optimal solutions. Thus, balancing the trade-off between reduced optimization effectiveness and increased efficiency remains a considerable challenge in the application of dimensionality reduction techniques.
Variable screening methods, particularly sensitivity analysis, represent another key approach to improving optimization efficiency and have been widely applied across various engineering disciplines [
21,
22,
23,
24]. Sensitivity analysis, also known as variable importance analysis, identifies input parameters that have a significant impact on outputs while disregarding less influential variables [
25]. This process reduces the dimensionality of the design space, decreases problem complexity, and enhances optimization efficiency. Furthermore, by pinpointing and prioritizing key design variables, sensitivity analysis provides essential insights into the interactions between inputs and outputs, which are essential for guiding design decisions and improving the interpretability of complex models. There are many sensitivity analysis methods, including the Morris method, Sobol’s method, and the functional variance analysis method, among others. These methods have been widely applied in various fields to address optimization problems. For instance, Lai et al. [
26] applied Sobol’s sensitivity analysis to investigate lithium-ion batteries used in electric vehicles. Jeong et al. [
27] proposed an efficient optimization method for aircraft design that analyzed variable sensitivity through functional analysis of variance. Xu et al. [
28] introduced an optimization method based on design variable screening. Utilizing a data-driven method that integrates the Kriging regression model with functional analysis of variance, their approach quantitatively assesses the influence of design variables on the objective function and incorporates a screening strategy to reduce both problem dimensionality and computational costs. However, each method has its own strengths and limitations. The Morris method is computationally efficient but cannot capture higher-order effects, while Sobol’s method provides comprehensive sensitivity indices, including first-order and interaction effects. Nevertheless, it relies on multi-dimensional integration and requires a large number of samples to compute sensitivity indices, resulting in high computational costs. To address these challenges, this paper adopts the functional variance analysis method, which improves efficiency by utilizing a Kriging model to transform high-dimensional integrals into one-dimensional integrals.
In the aforementioned variance-based sensitivity analysis method, calculating the response variance of each variable requires traversing the entire design space [
29,
30]. As a result, selecting an appropriate design space is critical for ensuring the accuracy of sensitivity analysis results and demands careful consideration of the design range for each variable. In ASO, the ranges of design variables are typically determined subjectively by designers based on engineering experience, which introduces uncertainty into the definition of these variable ranges [
31]. During the optimization process, the parameterization phase often involves incorporating as many design variables as possible to capture geometric uncertainty and explore a broader range of potential shapes. However, many of these variables may not directly influence the objective function but instead induce only minor modifications to the geometric shape. Consequently, adjusting the range of these design variables may be redundant In the optimization process.
In practical engineering applications, when the relationship between design variables and the objective function is uncertain, timely adjustments to the variable ranges during the optimization process are crucial for identifying the optimal search region. However, flow problems often exhibit complex characteristics such as multi-peaked behavior and nonlinearity [
32,
33], and the shape and trend of the objective function vary across different design ranges, leading to substantial variations in the flow field. Consequently, in various optimization contexts, even when targeting the same objective function, the optimization goals may differ due to these variations. Based on the preceding discussion and analysis, it is evident that existing research lacks a clear definition or distinction regarding the scope of design variables. Therefore, this study aims to investigate the impact of variations in the scope of design variables on the outcomes of variance-based global sensitivity analysis methods. Moreover, the study explores the influence of selected design variables on the flow field, providing theoretical guidance for aerodynamic shape optimization.
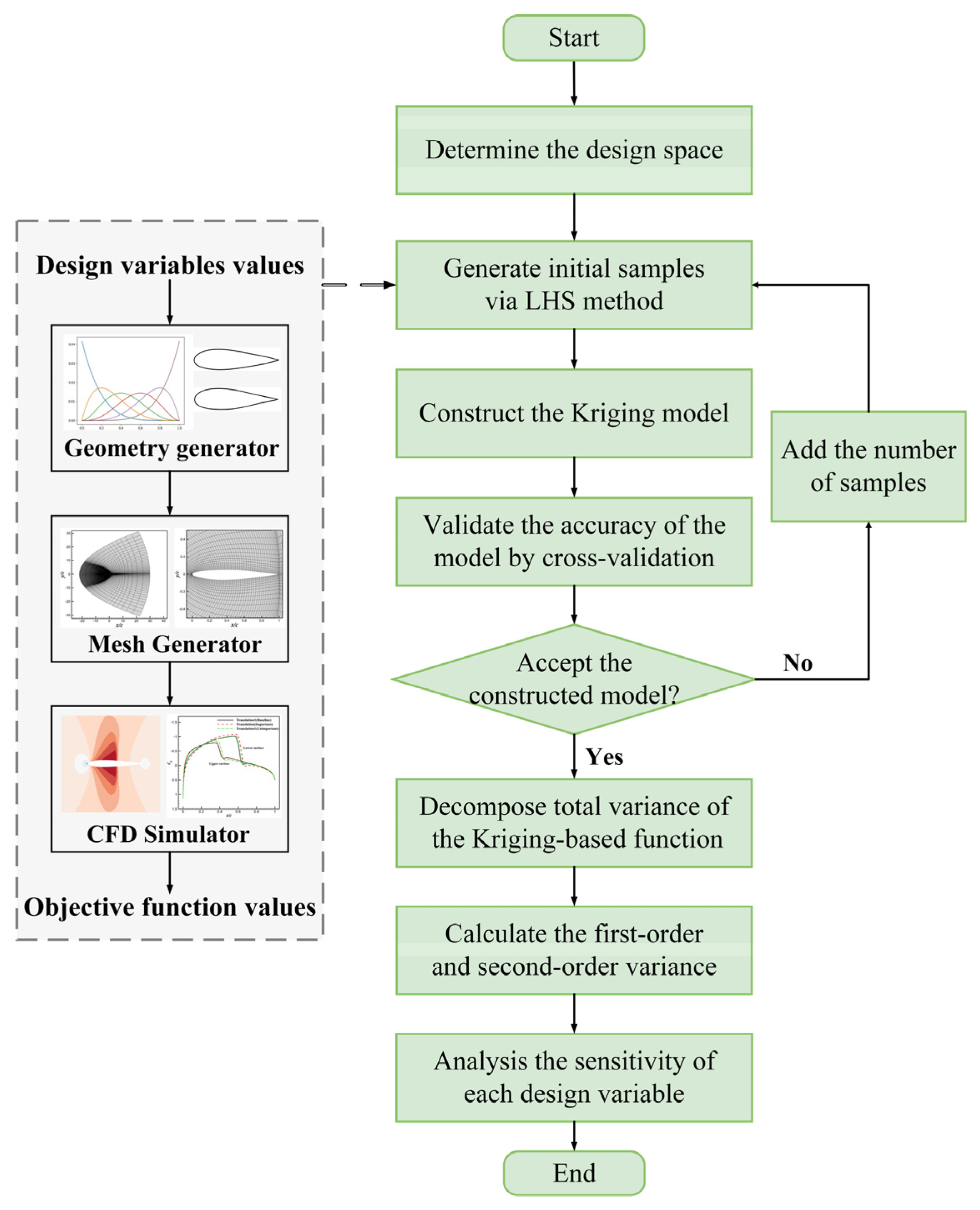
The structure of this paper is organized as follows:
Section 2 provides a detailed introduction to the data-driven method employed in this study.
Section 3 introduces and discusses three design space variation schemes: scaling, translation, and combination.
Section 4 verifies the feasibility and rationale of these variation schemes by two test functions, followed by a comprehensive analysis of these results.
Section 5 applies the proposed design space variation schemes to the wave drag reduction case of the NACA0012 airfoil, along with a detailed analysis of the outcomes. Finally,
Section 6 presents the conclusions of this paper.
4. Effect of Design Space Variation on Sensitivity Results in Test Functions
In this section, two typical test functions are employed to investigate the impact of design space variations on the sensitivity results of the design variables. These test functions span multi-dimensional (2D-6D) and multi-modal (single-extremum and multi-extremum) problems. As shown in
Table 3, the initial design space serves as the baseline for subsequent variations.
By applying scaling, translation, and combination variations to the initial design space, new design spaces are generated. The variation schemes for each case are detailed shown in
Table 4,
Table 5 and
Table 6. The parameter settings in these tables are as follows:
In the scaling variation scheme, the initial design space is proportionally scaled by adjusting the scaling factor vector
. In
Table 3,
to
respectively represent scaling the initial design space by a factor of 1 to 5. The values for Case I differ slightly, as explained in detail in
Section 4.1. Five different scaling schemes are generated by substituting the scaling factor vector β into Equation (29), with Scaling1 representing the initial design space.
In the translation variation scheme, the initial design space is translated left and right according to the translation factor vector
. Here,
and
represent translational movements that are two and four times the size of the initial design space in the positive and negative directions, respectively. The values for Case I differ slightly, as detailed in
Section 4.1. Five different translation schemes are generated by substituting the translation factor vector
into Equation (33), with Translation 3 representing the initial design space.
In the optimization process, it is generally desirable for the design variables to encompass the optimal solution so that the optimal solution can be found quickly, thereby improving the optimization efficiency. In the combination variation scheme, the position of the minimum point of the function is taken into consideration. The design space is generated around different regions near the minimum point by adjusting the translation factor vector and the scaling factor vector . Specifically, two combination schemes are discussed: (1) The center position of the design space is translated to the minimum point, and the scaling factor vector is adjusted to generate different design spaces that contain the minimum point; (2) The center position of the design space is translated to different points near the minimum point, and the scaling factor vector is adjusted to generate different design spaces that do not contain the minimum point. The parameters in the combination schemes are selected based on the minimum points, and different combination schemes are obtained by substituting these parameters into Equation (34).
4.1. Case I
Case I is a two-dimensional single-extremum function expressed as
where the initial design space has a center at
, with a size of
. The minimum point of the function is located at
.
Figure 2 shows the 3D plot of
, illustrating that the function exhibits mirror symmetry. The variations in design variables
and
are completely consistent. Therefore, when varying the design space, only the design variable
is considered, while the design variable
is fixed within the range of [−5,5].
The sensitivity analysis results for different scaling schemes are presented in
Table 7. The interaction effects between design variables are weak and can be neglected. The results indicate that scaling the design space significantly influences the main effect indices of each design variable. In Scaling1, the main effect index of
is less than 1%. As the scaling factor increases, the main effect index of
increases. Specifically, in Scaling 4 and Scaling 5, the main effect index of
exceeds 20%.
The sensitivity analysis results for different translation schemes are presented in
Table 8. From Translation 1 to Translation 3 the main effect index of
decreases. From Translation 3 to Translation 5, the main effect index of
increases. Comparing the results, it can be observed that when the function exhibits mirror symmetry, the sensitivity analysis results for design spaces aligned with the symmetrical plane remain consistently similar.
For the combination variation, since the minimum point of
and the center position of the initial design space are the same, only the second combination scheme is considered.
Table 9 presents the sensitivity analysis results for different combination schemes. It can be observed that as the scaling factor
and the translation
change, the main effect index of
vary. From Combination 1 to Combination 3, the main effect index of
increases, while from Combination 4 to Combination 6, the main effect index of
decreases.
For this single-extremum function, scaling, translation, and combination variations all influence the sensitivity analysis results of design variables, and the variation trends of the sensitivity indices are closely related to the shape of the function. Since the function is mirror-symmetric about the plane, two design spaces that are symmetric about this plane yield similar sensitivity results.
4.2. Case II
Case II is a six-dimensional multi-extremum function, expressed as
where the initial design space has a center at
and a size of
. The minimum point is at
.
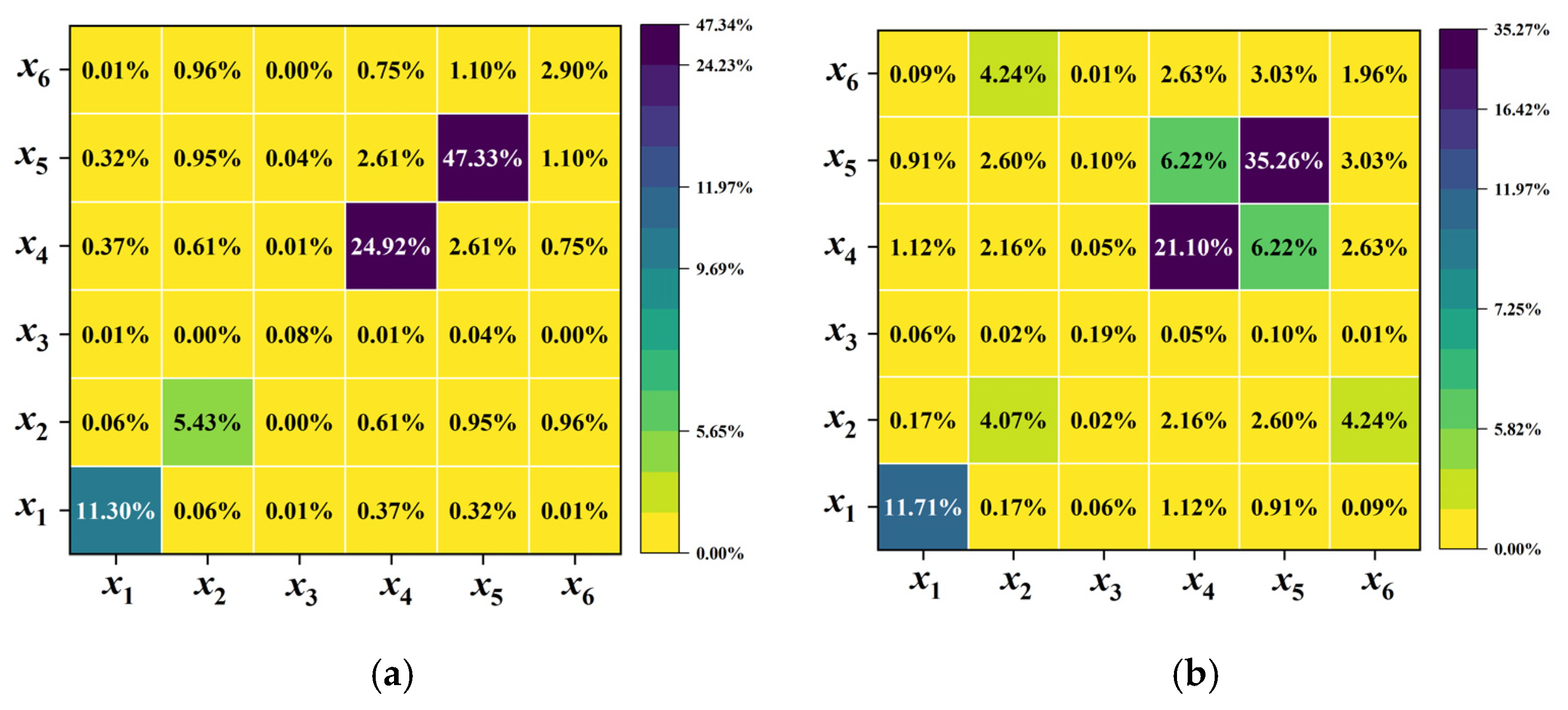
Figure 3 shows the sensitivity results for five scaling schemes. From Scaling 1 to Saling 5, as the scaling factor
increases, the sensitivity indices of design variables change significantly. Among them, the main effect index of
remains relatively unchanged, indicating minimal influence from the scaling variations, while the interaction effect index of
increases. The main effect indices of
,
,
, and
decrease, but the interaction effect indices between these design variables increase. Additionally, the importance ranking of design variables varies considerably across the five scaling schemes. In Scaling 1 and Scaling 3, the top two important design variables are
and
. In Scaling 4, the top two important design variables are
and
. In Scaling 5, the top two important design variables are
and
.
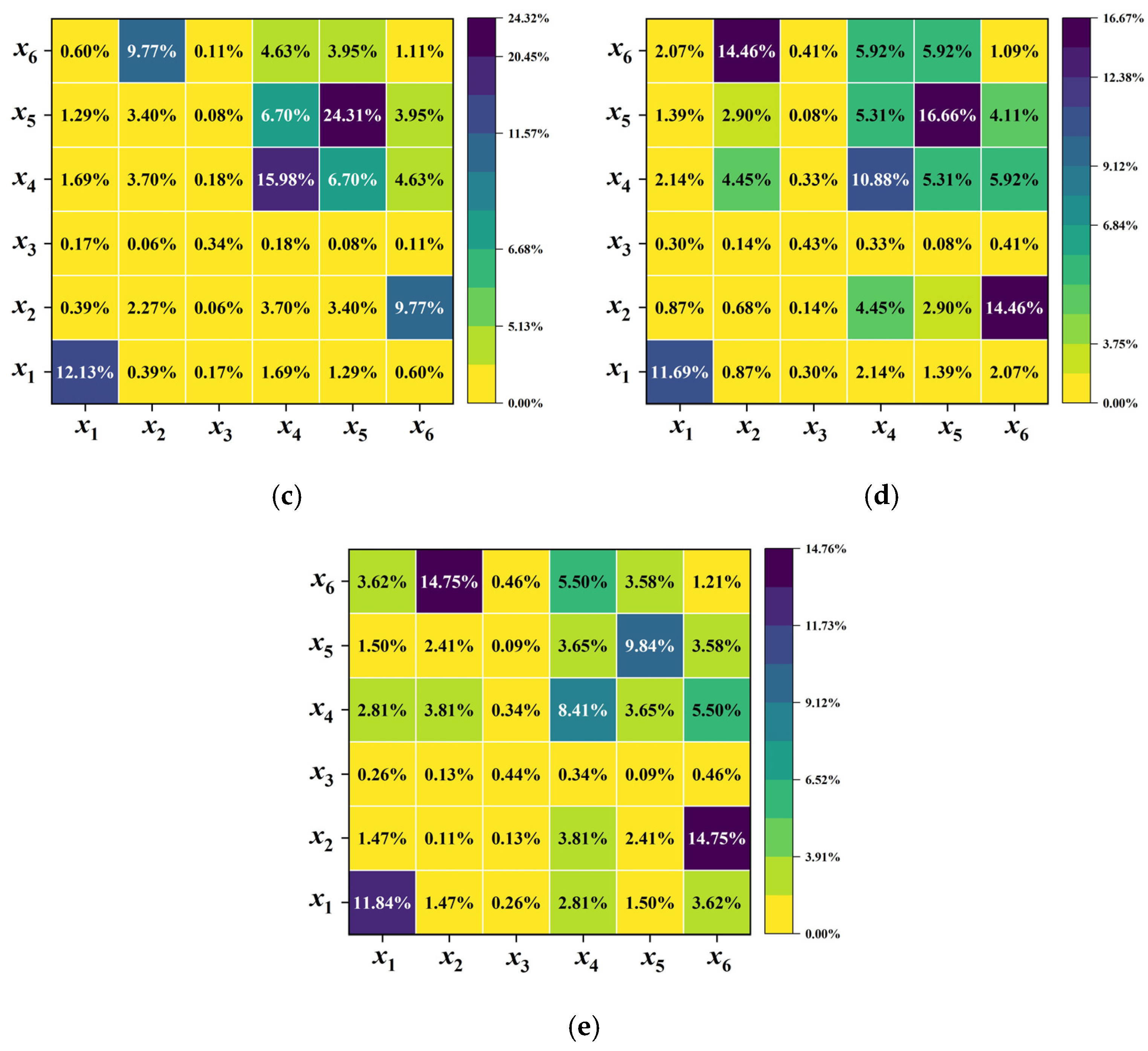
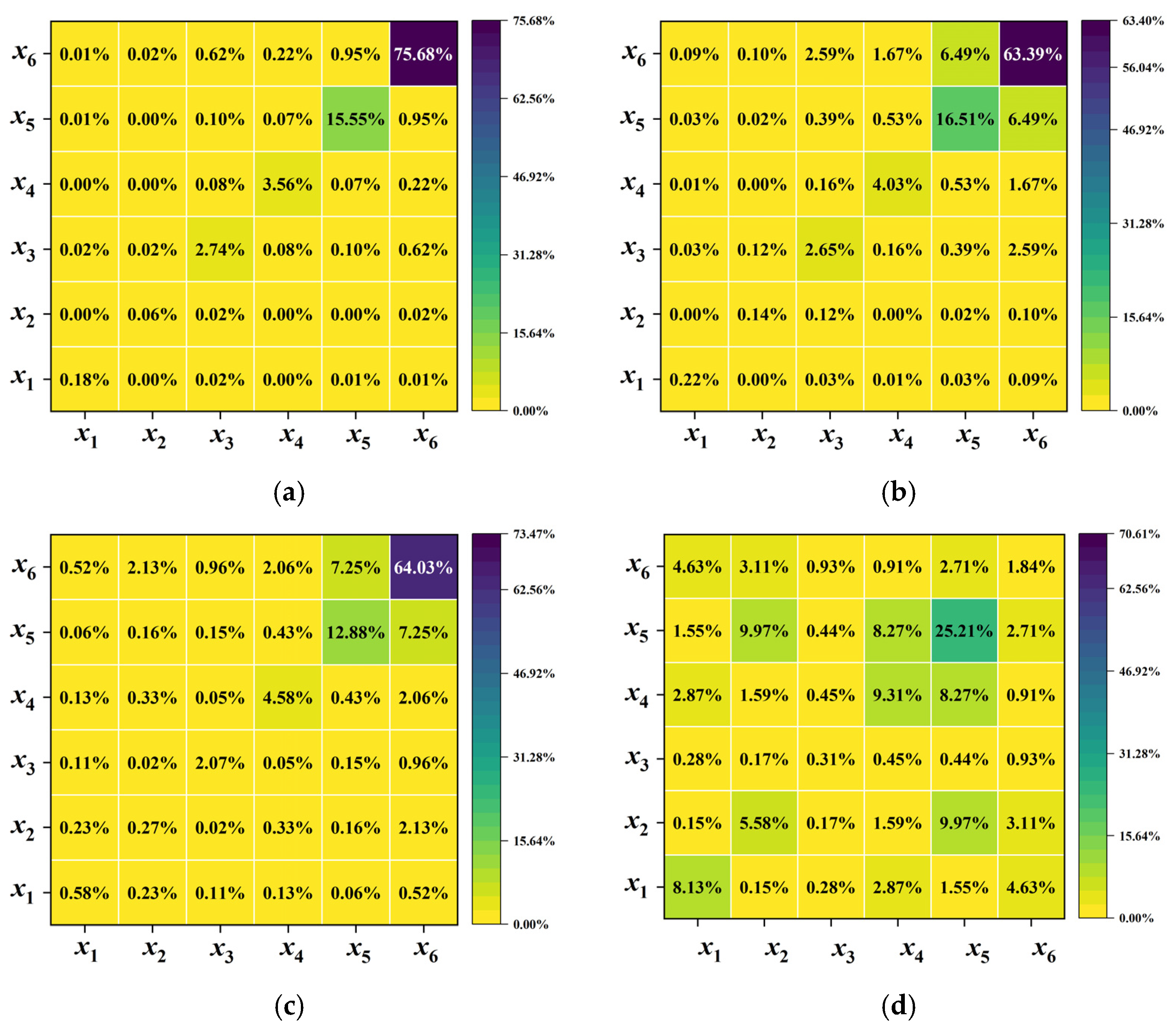
The sensitivity results for different translation schemes are shown in
Figure 4. In Translation 1,
and
contribute the most to the objective function. Their interaction effect is relatively strong, with the interaction effect index exceeding 5%. In Translation 2, the main effect index of
increases, while that of
decreases. Additionally, the interaction effect between two variables weakens, with the interaction effect index falling below 1%. In Translation 3 and Translation 4,
and
contribute the most to the objective function. In Translation 5, both the main and interaction effect indices of
increase significantly, making it the most influential variable.
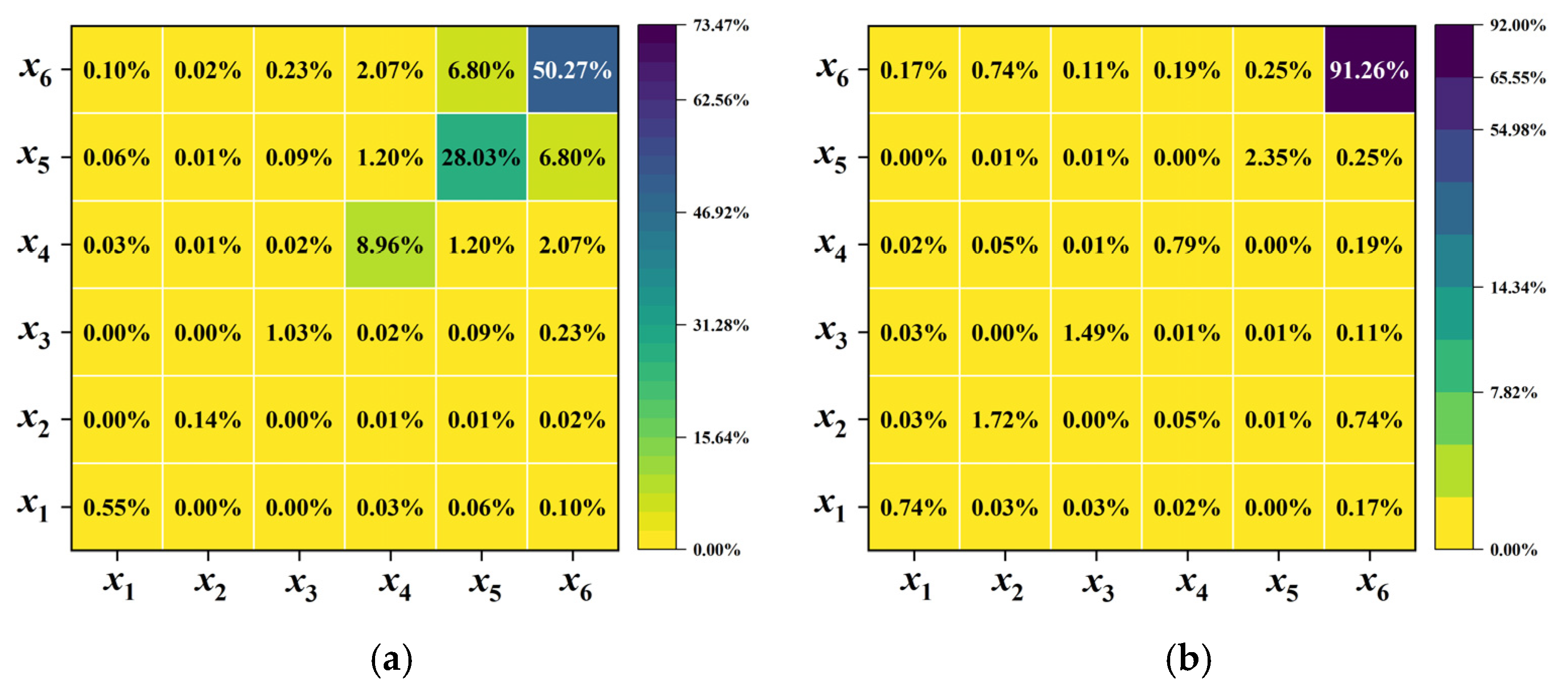
Figure 5 shows the sensitivity results for different combination schemes. In Combination 1 and Combination 2, the center position of the new design space coincides with the minimum point. In Combination 3 and Combination 4, the new design space does not contain the minimum point. In Combination 1 and Combination 2, it can be observed that as the scaling factor
increases, the main effect index of the design variable
decrease. However, it remains the most important design variable, with main effect index exceeding 50%. Additionally, the interaction effect index between design variables
and
increases significantly. In Combination 3 and Combination 4, when the new design space does not contain the minimum point, the sensitivity results vary significantly for different translation factor
under the same scaling factor
. In Combination 3, where the translation factor
is used,
and
are the most important variables. In Combination 4, where a different translation factor
is applied,
and
becomes the most influential variables.
The function is a multi-extreme function with a relatively complex shape. The values of the function fluctuate greatly across different intervals, especially in regions containing local minima. Different variation schemes generate different design spaces, and the shape of the function within these design spaces can vary significantly. This leads to distinct, and, in some cases, even opposing sensitivity results.
In summary, whether dealing with single-extremum or multi-extremum functions, scaling, translation, and combination variations of the design space can significantly impact the sensitivity results of design variables. If the shape of the function changes notably within the design space, the sensitivity results may vary considerably. Therefore, it is crucial to carefully define the design space before conducting the sensitivity analysis.
6. Conclusions
This paper investigates the influence of geometric parameterized variables on transonic flow fields under different design spaces. Three variation schemes of the design space are established in this study, and their effects on sensitivity results are analyzed using two test functions and a wave drag reduction case. The underlying causes of these patterns are also explored. The conclusions are as follows:
(1) In the test functions, variations in the design space (scaling, translation, and combination) have a significant impact on the sensitivity results. The trends of sensitivity indices for these variables are directly influenced by the shape of functions within the design space.
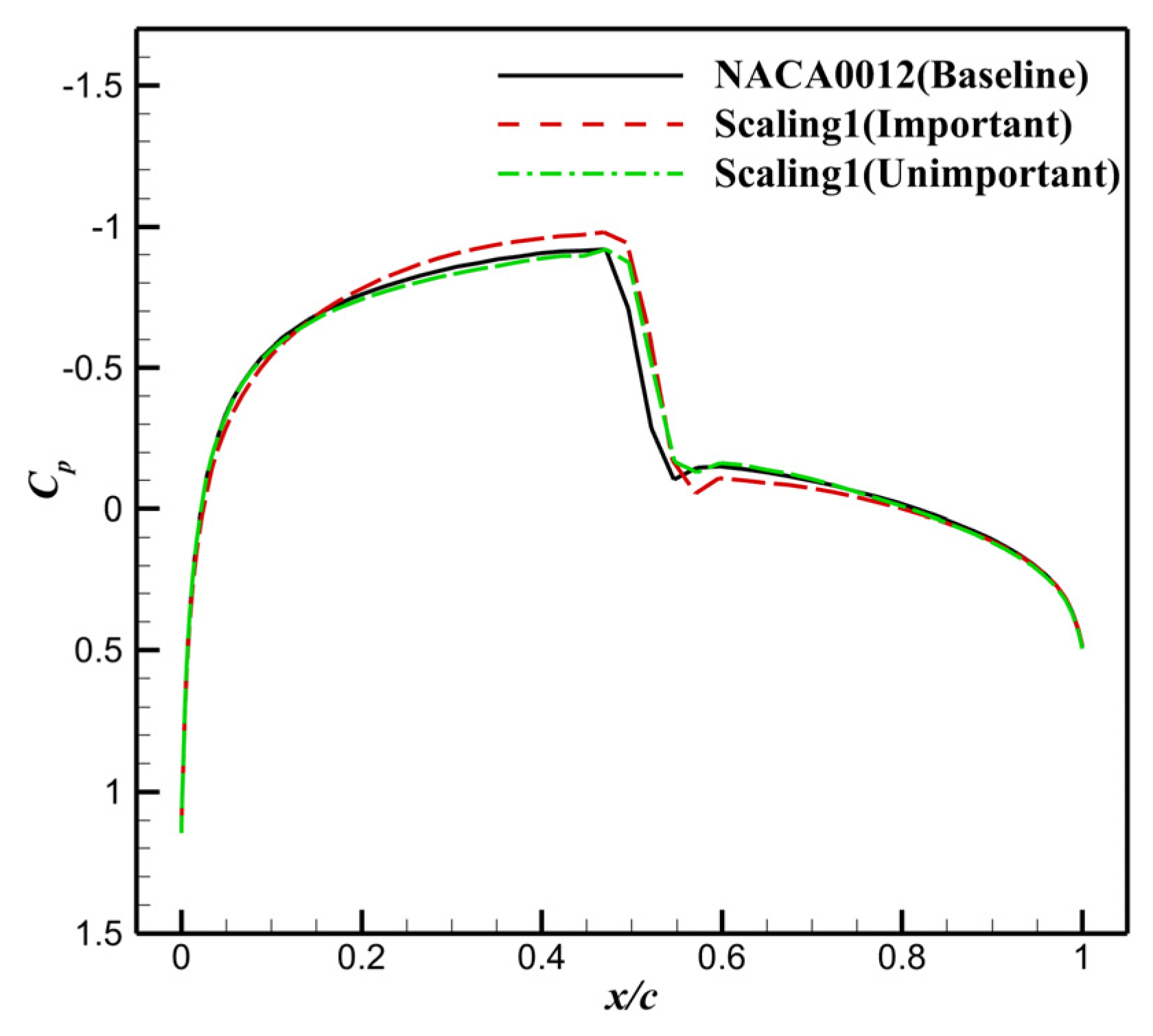
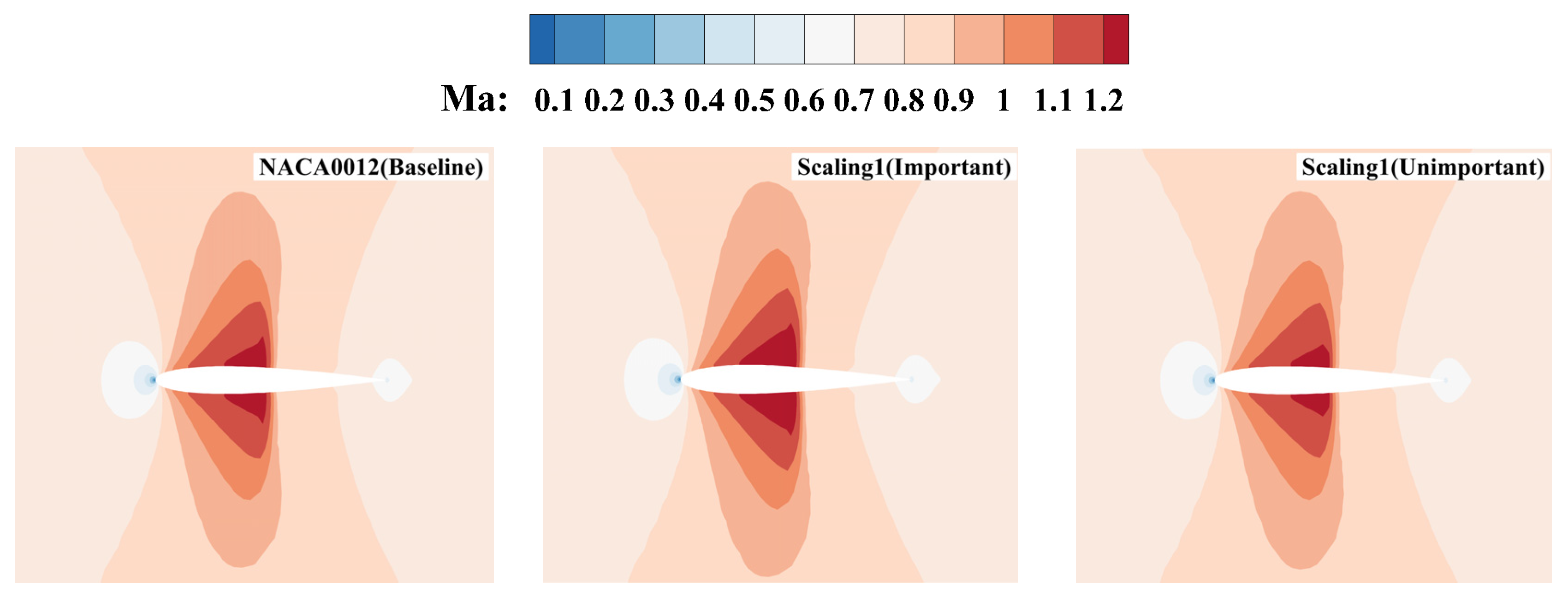
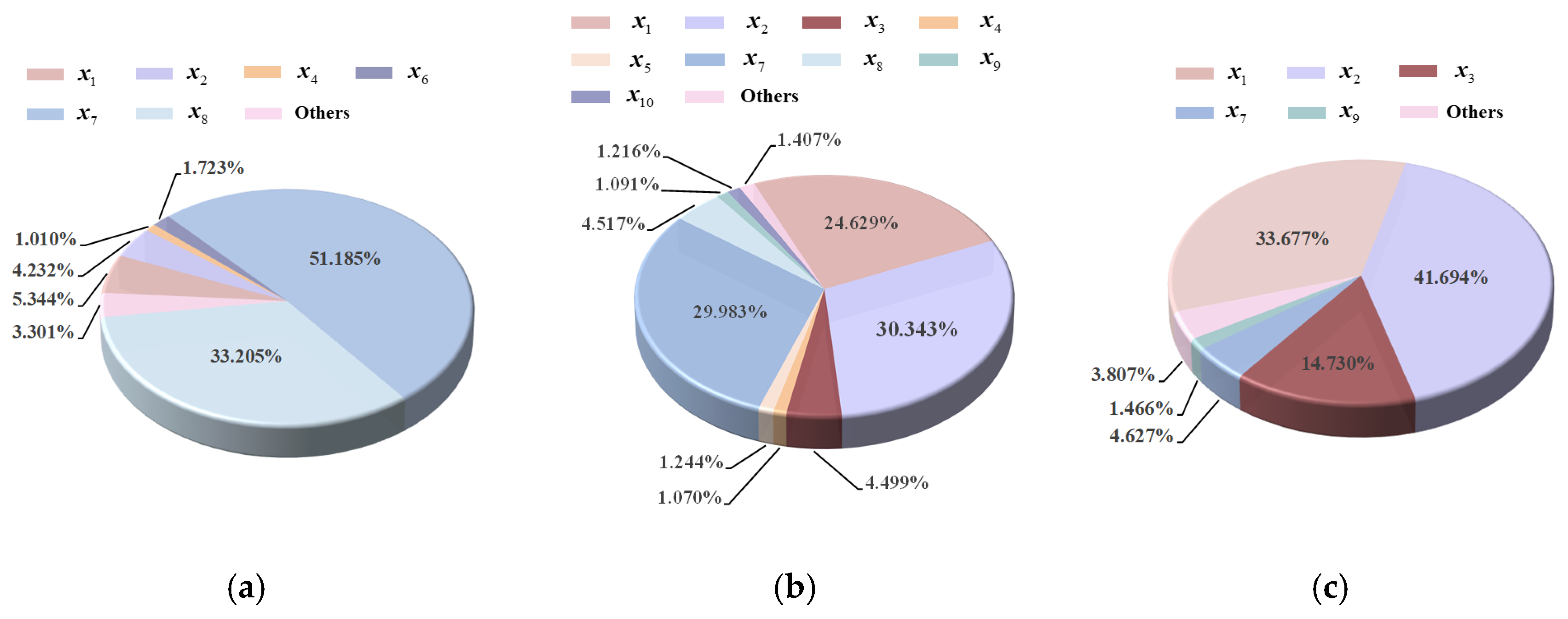
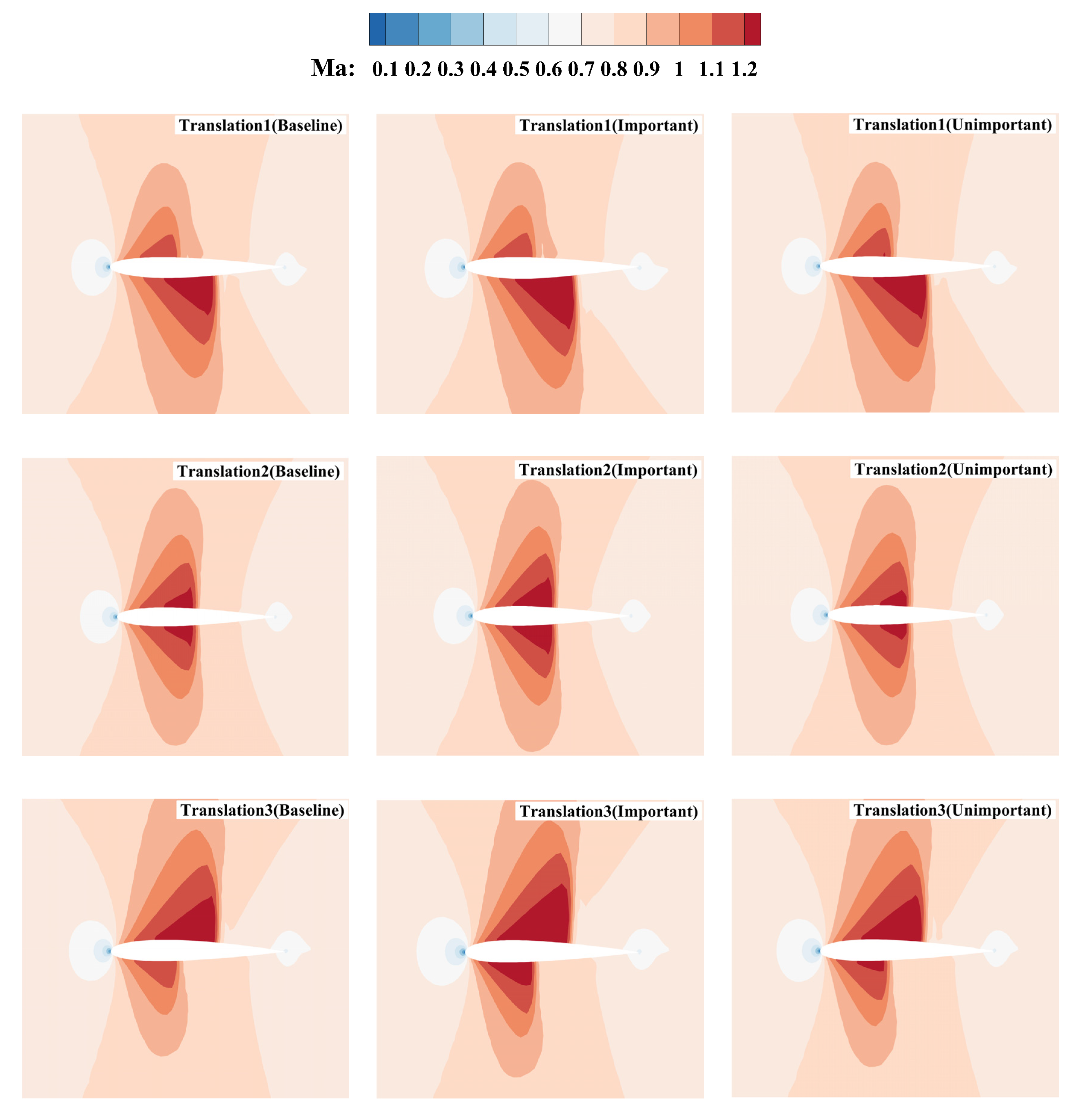
(2) In the wave drag reduction case, variations in the design space affect the relationship between geometric parameterized variables and the flow field, specifically influencing the shock-wave position and strength, which is reflected in the sensitivity indices of the variables.
(3) The sensitivity indices of geometric parameterized variables are closely related to the Mach number. As the Mach number changes, the sensitivity results of these variables in different design spaces also change accordingly.
(4) The conclusions of this paper have important implications for aerodynamic optimization design. When performing the sensitivity analysis method in the optimization design, careful selection of the design space is crucial to ensure accurate results.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}