1. Introduction
With the evolution of aircraft towards more and all-electric systems, DC/DC converters are playing an increasingly crucial role in the aviation field. These converters are responsible for converting DC power from one voltage level to another to meet the varying voltage requirements of different electronic devices [
1]. As the power ratings continue to increase, aircraft may encounter diverse environmental disturbances and electromagnetic interferences, necessitating that the DC/DC converter provide a stable voltage supply to ensure the safe operation of the load. The primary factors affecting the performance of the DC/DC converter include temperature, electrical stress, and aging [
2]. Failure or malfunction of the converter can result in improper functioning of electronic devices and may even lead to a complete system collapse. Consequently, the reliability of DC/DC converters is vital for system safety.
DC/DC converter failures can be categorized into two types based on their characteristics and behavior: hard failures and soft failures [
3,
4]. Hard failures result in catastrophic outcomes, often due to significant component damage within the circuit, such as short circuits or open circuits. In contrast, soft failures generally do not lead to severe system damage and can be further subdivided into temporary failures and incipient failures. Temporary failures typically involve brief voltage fluctuations and circuit anomalies, which may cause transient variations in system performance. These failures are frequently attributed to environmental changes or fluctuations in input voltage. Incipient failures, also known as progressive failures, are primarily caused by the degradation (aging) of key components in the circuit. As the aviation industry has gradually shifted from periodic maintenance to condition-based maintenance (CBM) [
5], novel technical concepts have emerged in recent years. Among these concepts, prognosis and health management (PHM) has garnered significant attention, emerging as a critical field of research in the current Industrial 4.0 revolution [
6]. PHM utilizes condition monitoring data and information provided by operational practitioners to assess system health, detect potential anomalies, diagnose incoming faults, and predict the remaining useful life (RUL) [
7]. Under the PHM framework, the diagnosis and evaluation of incipient failures have become a prominent research focus. The first step in these diagnostic or evaluation algorithms is feature extraction.
Feature extraction refers to the process of deriving useful information from raw data for classification and prediction. This process can eliminate redundant information and noise within the raw data, thereby enhancing the efficiency and quality of data processing [
8]. The operating parameters of the circuit can be categorized into three types based on the signal form: time domain features, frequency domain features, and time–frequency domain features. Time domain features are currently the subject of extensive research due to their strong interpretability, as they encompass clear physical meanings. Commonly utilized time domain features include maximum and minimum value, mean value [
9], variance [
10], and root mean square [
11]. B. R. Nayana and P. Geethanjali proposed 18 time–domain features for the early diagnosis of bearing faults [
12], which consist of 6 time-dependent spectral features (TDSFs) and 12 statistical time domain features. This approach effectively captures the fault characteristics of mechanical structures such as bearings. These parameters, which possess units, are referred to as dimensioned metrics and are highly sensitive to environmental variables (e.g., load). Consequently, several dimensionless indicators, including kurtosis, skewness [
13], waveform factor, peak factor, pulse factor, and margin factor, are employed to characterize degradation or early failures. In a study conducted by Sandeep and Sanjay [
14], spectral kurtosis (SK) was adopted for the fault classification of rotating machines. A similar approach was employed by Tian et al. [
15] to detect faults in motor bearings. Some features may not be adequately represented in the time domain; therefore, frequency domain analysis may be necessary. The Fast Fourier Transform (FFT) enables the transformation of time domain signals into the frequency domain, thereby providing a clearer representation of the signal’s properties and characteristics. Commonly used frequency domain indicators include characteristic frequency [
16,
17], mean square frequency [
18], harmonics [
19], frequency variance [
20], etc. For instance, the study by Indrayudh et al. [
21] incorporated both time domain features and frequency domain parameters, such as frequency center (FC), RMS variance frequency, and root variance frequency, significantly enhancing the representativeness of the features. Wang [
22] also integrated both time domain and frequency domain features in the fault diagnostics of rolling bearings. Jing Yang [
23] noted that time domain features do not effectively distinguish fault stages, while frequency domain features demonstrate superior performance in diagnosing the incipient fault of deep groove ball bearings. Through detailed frequency domain analysis, researchers have discovered that the harmonic components of certain signals are not fixed, and the patterns of these harmonics can also serve as features. In the early stages of a fault, the fault characteristics may present as a time-varying frequency component. Consequently, time–frequency domain features are gaining attention in the engineering field, as they can elucidate the trend of frequency changes in specific signals over time. In the study by Qiyue Li et al. [
24], wavelet transform was employed to extract features in the time–frequency domain, yielding satisfactory results in the detection of incipient faults in power distribution systems. Fujin Deng et al. [
25] proposed a feature extraction algorithm based on sliding time windows for fault localization in multilevel converters. This approach is conceptually similar to the wavelet transform and can be classified as a time–frequency domain feature extraction method.
In aerospace applications, extracting degradation features from converters presents numerous significant challenges and constraints. Firstly, to maintain system integrity and minimize interference, the feature extraction process must adopt non-intrusive methods whenever possible. This necessitates conducting the process without substantially increasing the burden on additional acquisition circuits, which would inevitably add complexity to technical implementation. In order to monitor the performance degradation of aircraft engines in real-time, Dasheng Xiao et al. [
26] extracted 12 features, including environmental parameters, state parameters, and performance parameters, in a laboratory environment for screening. Concurrently, Umar Saleem et al. [
27] developed a machine learning system for aircraft generator fault classification tasks, which performed wavelet decomposition on the three-phase output current of the generator to extract the standard deviations and means of all detail coefficients. Additionally, Yu Zhang et al. [
28] conducted research on the degradation of aircraft auxiliary power units based on existing sensors, extracting data from five sensors, including start-up time and peak exhaust temperature. These studies illustrate the numerous limitations present in the measurement conditions for degradation research in aviation scenarios.
Based on the current research status, it is evident that there are three significant limitations in the field of feature extraction. The first limitation is the lack of a comparative analysis of features across the time domain, frequency domain, and time–frequency domain, which results in selected features being less robust and prone to information loss. The second limitation is that the majority of research has concentrated on the feature extraction of hard faults, such as short or open circuits, while there is limited exploration of soft fault features, such as aging. Finally, the correlation between features is often overlooked, which frequently leads to the inclusion of highly correlated or redundant features within the feature subset.
In response to the aforementioned issues, the innovative contributions of this paper are summarized as follows.
(1) This study concentrates on incipient failures of DC/DC converters, a process characterized by its slow progression and poorly differentiated features. Most incipient failures stem from aging and do not lead to significant changes in external characteristics, unlike hard failures. Nevertheless, identifying incipient faults is crucial for enhancing system reliability.
(2) The feature extraction presented in this paper is conducted across time, frequency, and time–frequency domains. Currently, few researchers have simultaneously performed feature extraction in all three domains within the field of power electronics. Additionally, a novel feature based on the time–frequency domain is proposed, which is highly relevant to the degradation process.
(3) An improved ReliefF algorithm is introduced in this paper to eliminate highly correlated features from the feature subset by integrating the Pearson correlation coefficient. This proposed feature selection method yields a more concise subset, which can significantly expedite the model’s training process.
The overall structure of the study is organized into five sections, including this introductory section.
Section 2 presents the feature extraction methods relevant to each domain, with a particular emphasis on the time–frequency domain feature extraction method. Additionally, this section introduces the proposed ReliefF–Pearson-based feature selection method.
Section 3 describes the experimental platform and the simulation of the degradation process. In
Section 4, the feature extraction processes and results across the time, frequency, and time–frequency domains are detailed, along with the feature selection results and performance evaluations. Finally,
Section 5 provides a summary of the entire paper.
2. Feature Extraction and Selection Methods
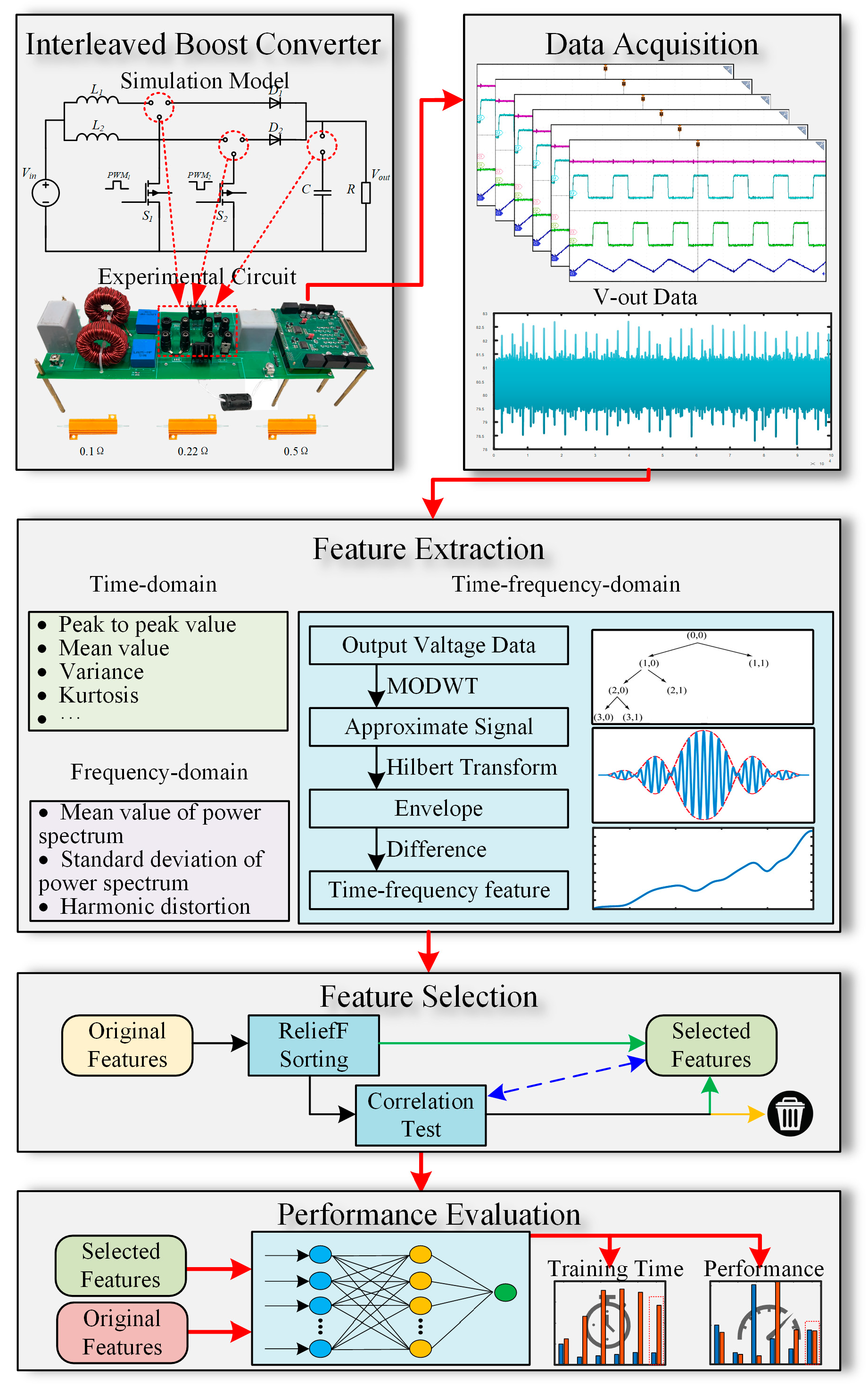
Feature extraction is fundamental to the implementation of PHM. The use of appropriate external features can significantly enhance the efficiency of fault diagnosis and prediction algorithms while also reducing the computational load. Time domain and frequency domain features are commonly employed to analyze signals from various perspectives. In this paper, five statistical indicators (such as mean value and variance) and three dimensionless parameters (including kurtosis) are extracted as time domain features. Frequency domain feature extraction is conducted through power spectrum analysis, wherein the mean value, standard deviation of the power spectrum, and the harmonic content are extracted. Currently, there is no standardized method for the extraction of time–frequency domain features, which necessitates a specific analysis tailored to the working scenario. Consequently, this paper proposes a method that integrates wavelet decomposition and the Hilbert transform to extract time–frequency domain features. The research flow of this paper is illustrated in
Figure 1.
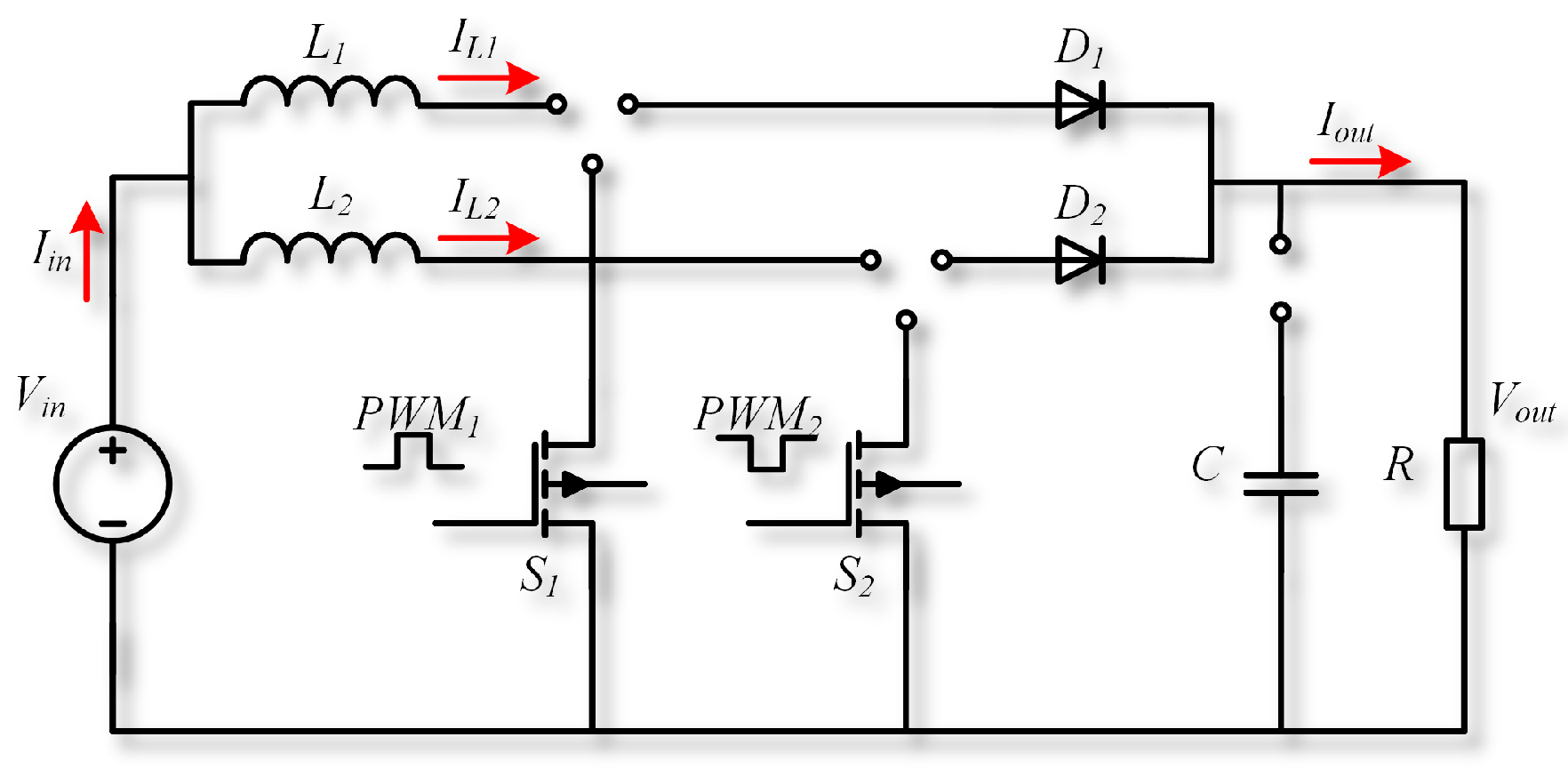
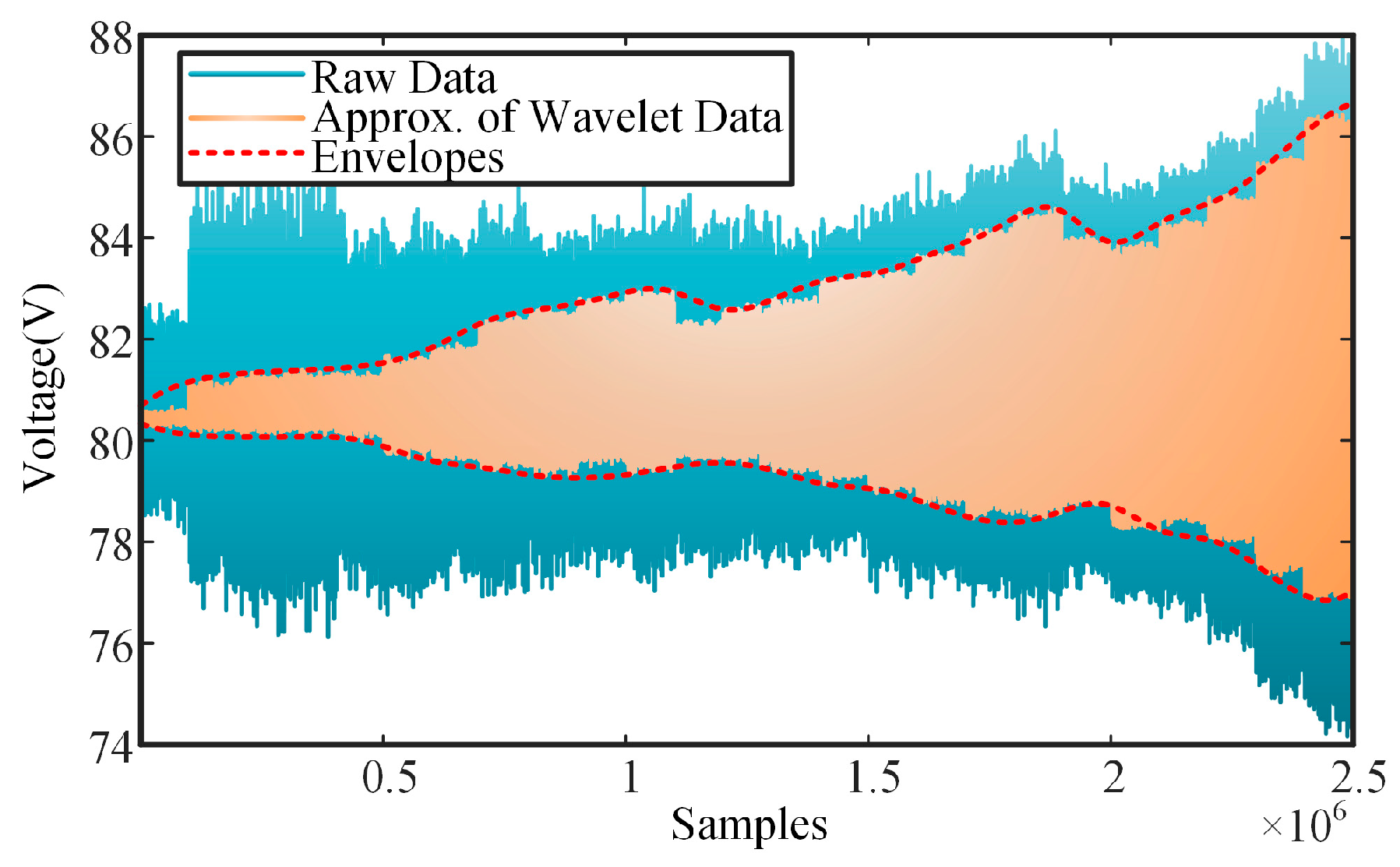
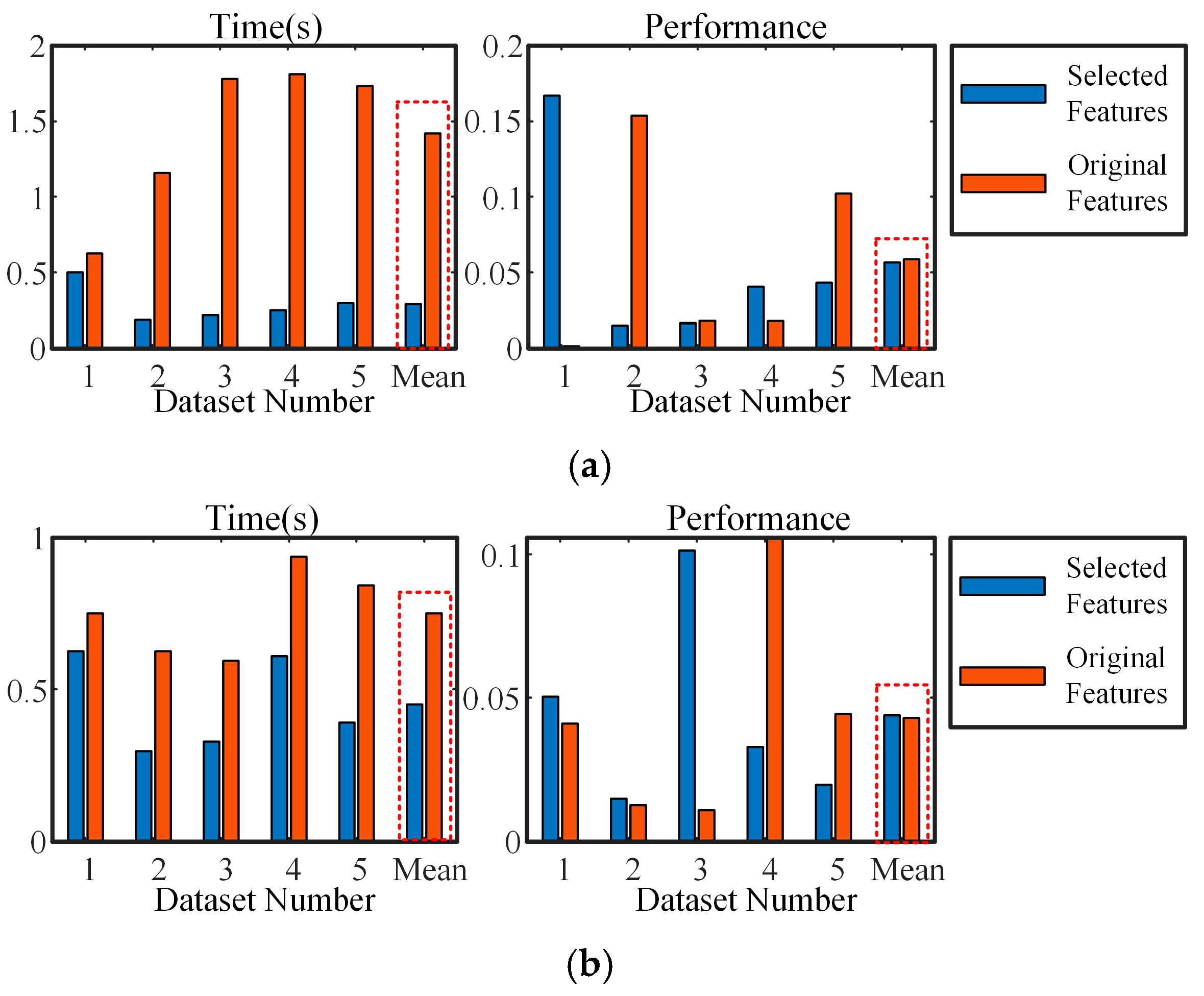
A practical interleaved boost converter serves as the experimental platform for this study. The output voltage is recorded as raw data by simulating the degradation process of the converter. Subsequently, features are extracted from three distinct domains. The proposed time–frequency domain feature extraction method processes the raw data by obtaining an approximate signal through wavelet decomposition. The Hilbert transform is then applied to derive the envelope of the approximate signal, with the difference between the upper and lower envelopes utilized as the time-frequency domain feature. During the feature selection phase, an improved ReliefF algorithm is introduced to rank the feature set and eliminate redundant features, leading to the identification of the final selected feature subset. The performance of this feature subset, in comparison to the original feature set, is evaluated through an incipient fault diagnosis model established using a back propagation neural network (BPNN).
2.1. Time Domain Feature Extraction
Time domain features are typically characterized by the waveform of a signal, which illustrates how the signal evolves over time. Some commonly used time domain features are shown in
Table 1.
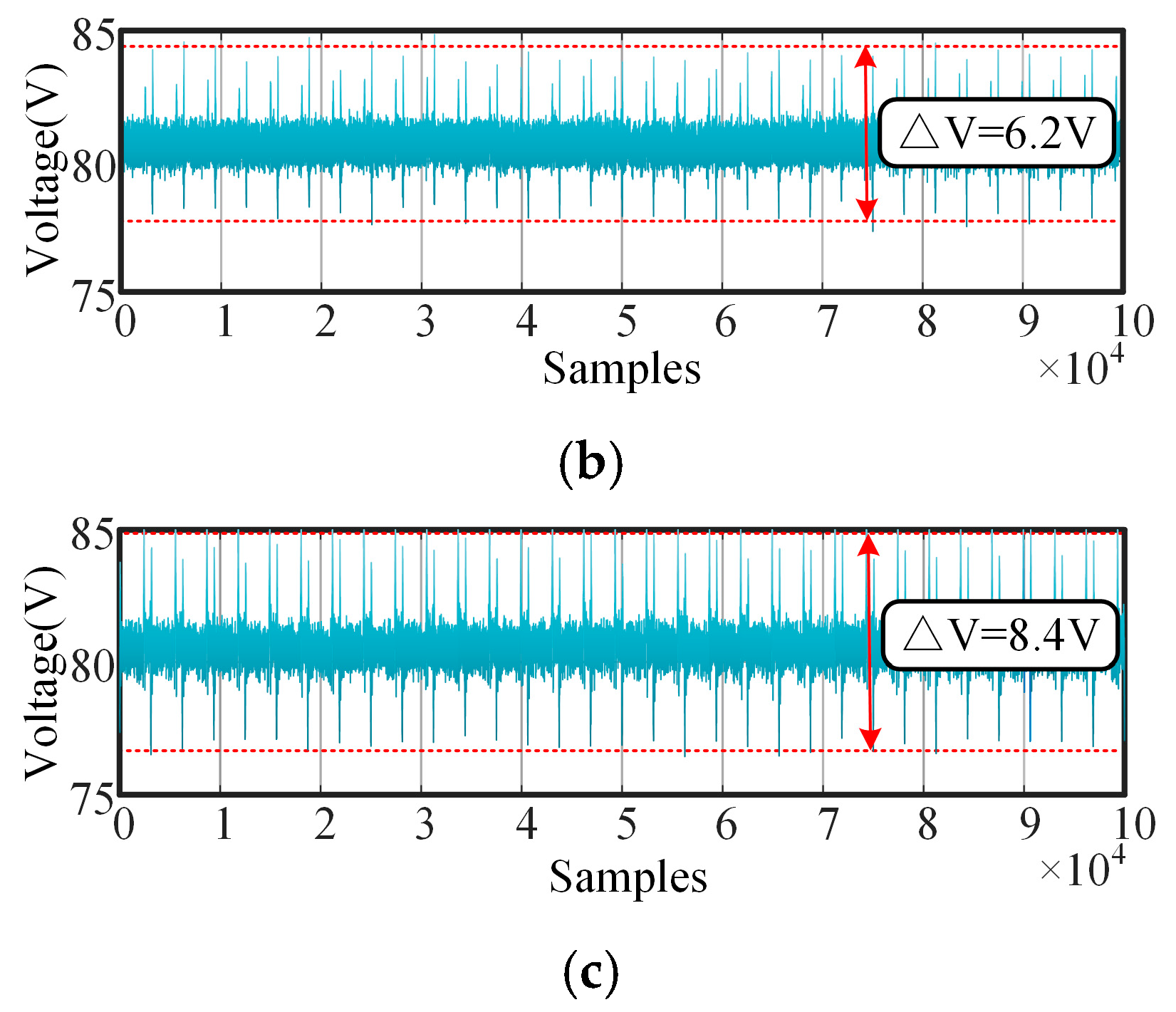
The variation in circuit operation parameters can sometimes impact the extraction of these features. Consequently, this paper employs several dimensionless parameters to complement the time domain features, which may reveal potential changing patterns in the signals. Kurtosis serves as a measure of the flatness of the signal distribution, indicating the extent to which the distribution is peaked or flat. In contrast, skewness assesses the asymmetry of the signal’s distribution, reflecting the degree to which the distribution deviates from its symmetry axis. Finally, the crest factor is defined as the ratio of the peak value of the signal to its mean value, indicating the extent of deviation of the peak value from its mean. The definitions of kurtosis, skewness, and the crest factor are provided in (1), (2), and (3), respectively.
Time domain features reflect the steady-state performance and dynamic response of the system. The results often possess clear physical meanings and high interpretability, which makes them widely applicable in various engineering fields.
2.2. Frequency Domain Feature Extraction
Frequency domain feature extraction involves analyzing a signal in the frequency domain to obtain information about its frequency characteristics, which reflect the distortion of the signal. The components within each frequency range can be acquired by decomposing the signal. A fundamental theoretical basis for frequency domain analysis is the Fourier transform (FT), which states that any continuously measured time series or signal can be represented as an infinite series of sinusoidal signals with varying frequencies.
One of the most widely used methods for frequency domain feature extraction is power spectral density (PSD). PSD represents the distribution of a signal’s power across the entire frequency domain, characterizing the distribution of the signal’s energy at different frequencies. The calculation of PSD is typically performed using methods such as fast Fourier transform (FFT) or discrete Fourier transform (DFT).
The DFT is defined by:
where
.
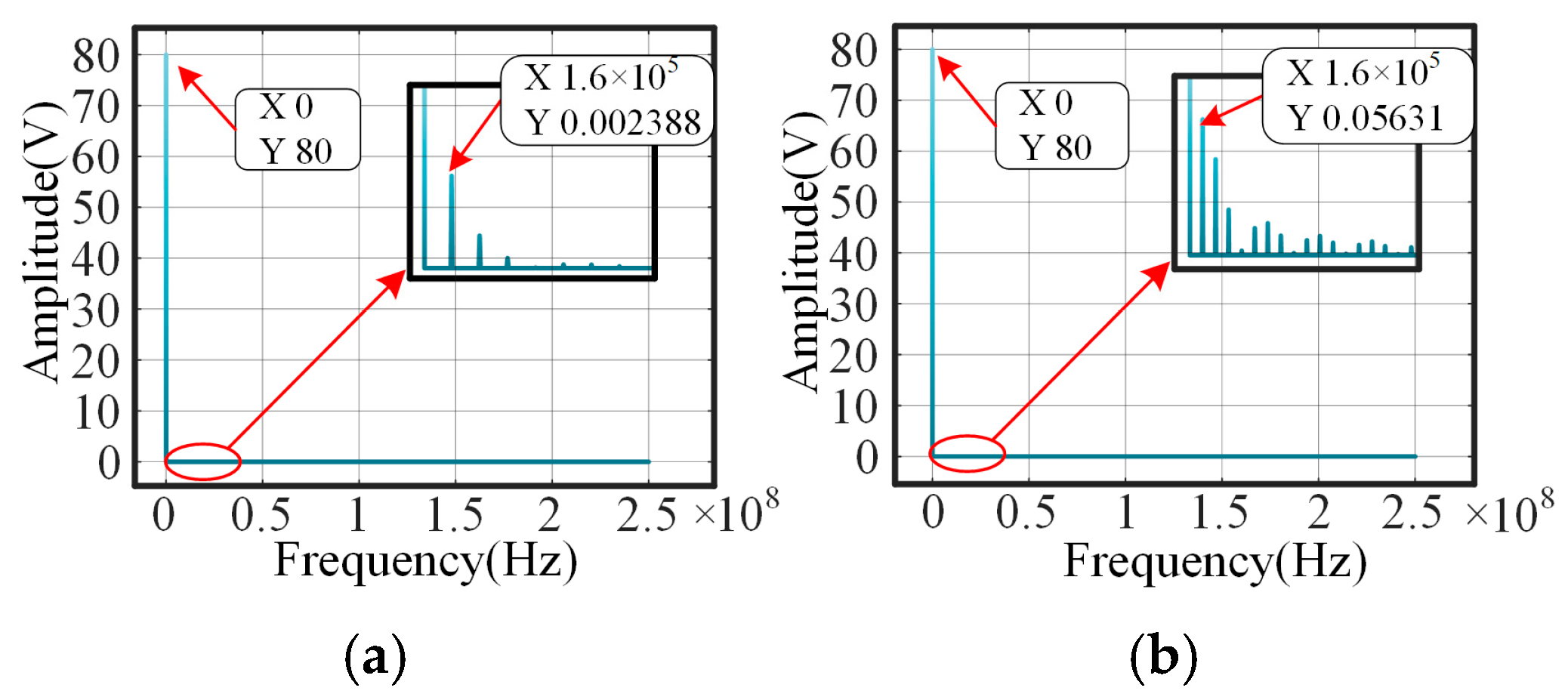
According to the Wiener–Khinchin theorem, PSD can be obtained through FFT results. The power spectrum can be obtained by the square of amplitude after FFT.
This paper conducted a power spectrum analysis to extract both the mean value and standard deviation of the power spectrum as frequency domain features.
Another important indicator in the frequency domain is harmonic distortion (HD), which can arise from various factors, including non-linear resistors, diodes, transistors, and other active components. These harmonics, which are integer multiples of the fundamental frequency, directly result from circuit nonlinearities. HD can be calculated by:
where
means the effective value of the
-th harmonic after FFT,
means the effective value of the original signal.
2.3. Time–Frequency Domain Feature Extraction
Time–frequency analysis, also known as joint time–frequency analysis (JTFA) [
29], is employed to analyze signals with frequencies that change over time. Features in the time–frequency domain can be considered spectral features that evolve over time. This analysis describes the frequency content of a signal at a specific moment through various signal processing methods, resulting in a complex function of time and frequency. In the context of the degradation process of converters, the trend of a particular harmonic component over time can be readily observed. Therefore, time–frequency domain analysis plays a crucial role in the feature extraction of this paper.
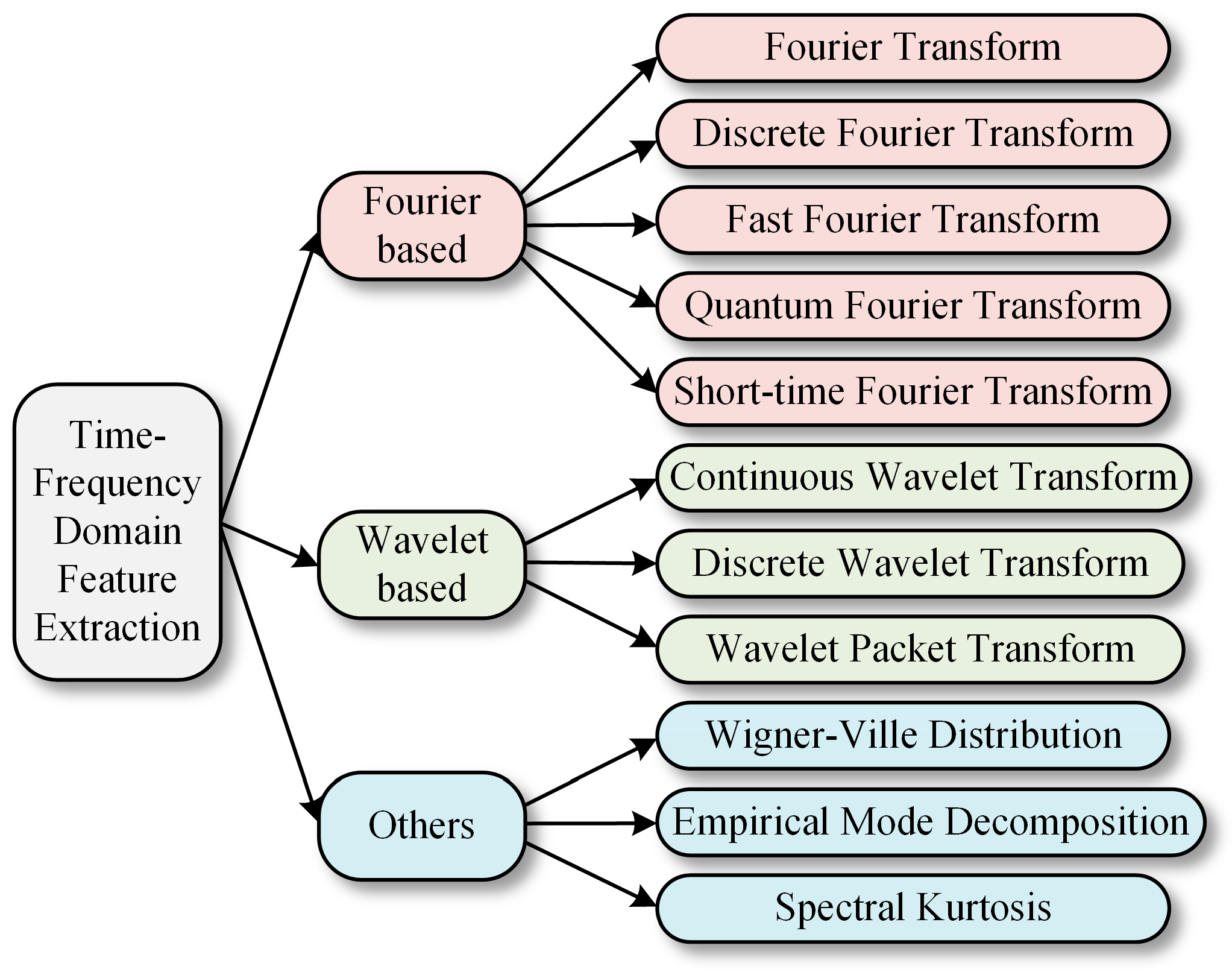
Currently, established time–frequency domain analysis methods encompass Fourier-based approaches [
30], wavelet-based techniques, and others (see
Figure 2). The fundamental principle of these methods involves segmenting the sequence into small, fixed-length segments, allowing for the determination of the spectral distribution trend of the entire time series through the processing of each segment.
In this paper, the discrete wavelet transform (DWT) is applied to segment the original sequence. DWT engages wavelet basis functions that convolve with a signal, decomposing it into components across different scales. This methodology facilitates analysis of the signal at varying resolutions, enabling the capture of both detailed (high-frequency) and smooth (low-frequency) components. By examining these components, the characteristics of the original signal at different scales can be effectively extracted. The wavelet function of the DWT used in this paper can be expressed as:
where
represents the scaling factor in the time–frequency domain, corresponding to the scaling characteristics of wavelet functions.
is the translation factor in the time–frequency domain, corresponding to the time-shift characteristics of the wavelet function.
signifies the mother wavelet. The variables
and
are the integer values that control the scaling and translating.
The corresponding DWT can be expressed as:
Based on (8), the maximum overlap discrete wavelet transform (MODWT) is employed to ensure that the transformed sequence retains the same length as the original signal, thereby circumventing the limitations of the DWT regarding the length of input signals [
31]. This characteristic enhances the adaptability of the time–frequency domain feature extraction method proposed in this paper. The mathematical formulation of MODWT is presented as follows.
Scaling coefficient:
here,
and
signify the wavelet and scaling filter of MODWT, respectively.
and
are defined as the level of decomposition and length of the filter (
) with
.
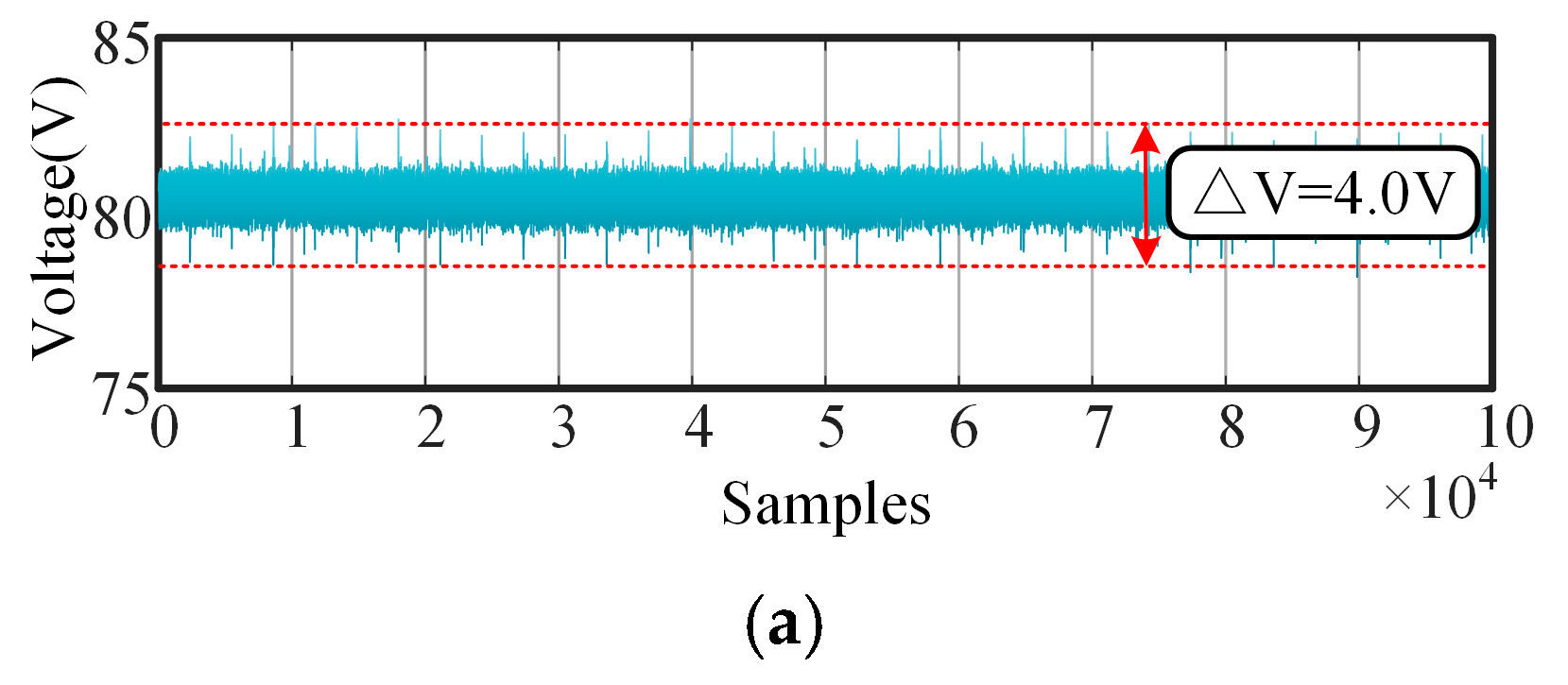
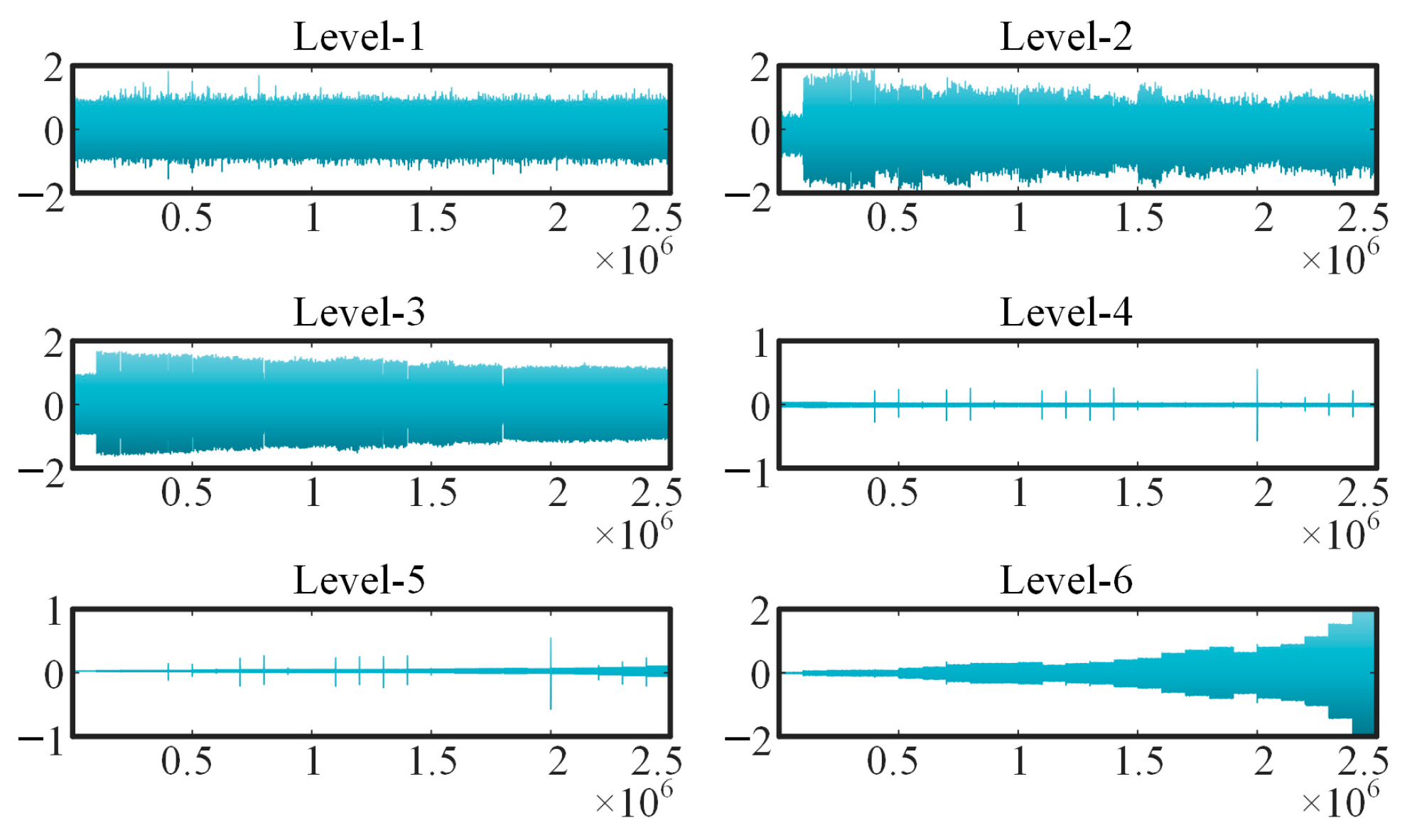
Using MODWT decomposition, the original signal can be decomposed into a series of components (level 1 to n) and approximate signals. For discrete signals, the energy is defined as the sum of the squares of the individual sampling points. In contrast, for continuous signals, the energy is calculated as the integral of the square over the entire interval of the signal. In feature engineering contexts, components with higher energy are typically selected to minimize information loss. In the case of DC signals, such as the converter output voltage discussed in this paper, the approximate signal generally contains the most energy. Consequently, this approximated signal is extracted, and its envelope is obtained using the Hilbert transform.
The Hilbert transform is defined as the convolution of the original signal with
, as shown in (11). Thereby, the Hilbert transform can be treated as a quadrature filter.
A new analytic signal can be defined as
For a signal with amplitude and phase,
can be written as
, therefore, (12) becomes (13):
In (13), is the envelope of the original signal. The difference between the upper and lower envelopes can then be taken as a degradation feature in the time–frequency domain.
2.4. Feature Selection Method
The features can be broadly categorized into three groups: (a) noisy and irrelevant, (b) redundant or weakly related, and (c) strongly related. The primary objective of feature selection is to create an optimal subset of features from the original feature set that maximizes relevance while minimizing redundancy. As a data dimensionality reduction technique, feature selection aims to enhance learning performance, improve accuracy, reduce computational costs, and increase model interpretability.
Feature selection methods can be classified into three main categories: supervised, unsupervised, and semi-supervised algorithms. Commonly used supervised algorithms can be further divided into filters, embedded methods, hybrid methods, and wrappers. The feature selection method proposed in this paper is based on the ReliefF algorithm, which is a supervised filtering method.
The ReliefF algorithm is a multi-class feature weighting algorithm derived from the Relief method, which assigns different weights to features based on their relevance to different classes. ReliefF algorithm randomly selects a sample from the training set and then finds the nearest neighbor sample of the same class (called the near hit) , and the nearest neighbor sample of a different class (called the near miss) . ReliefF algorithm firstly sets all the feature weights to 0 and then updates these weights based on the distances between these two samples.
For near miss:
where
and
are the weights of features at the
-th and
-th iteration steps, respectively.
and
denote the difference between sample set
and its nearest neighbor
.
is the number of iterations.
is the prior probability of the class to which
belongs, and
is the prior probability of the class to which
belongs.
and
are the distance function.
From (14) and (15), it is evident that if a feature demonstrates strong relevance in distinguishing near hits from near misses, its weight will be increased; conversely, if the feature exhibits a weak correlation, its weight will be decreased. The ReliefF algorithm accommodates both nominal and numerical variables and allows for the specification of a threshold or a predetermined number of important features. The running time of the algorithm increases linearly with the number of samples and the original feature dimensions.
The ReliefF algorithm effectively calculates the correlation between features and targets, specifically, the correlation between the feature set
and the supervisory quantity
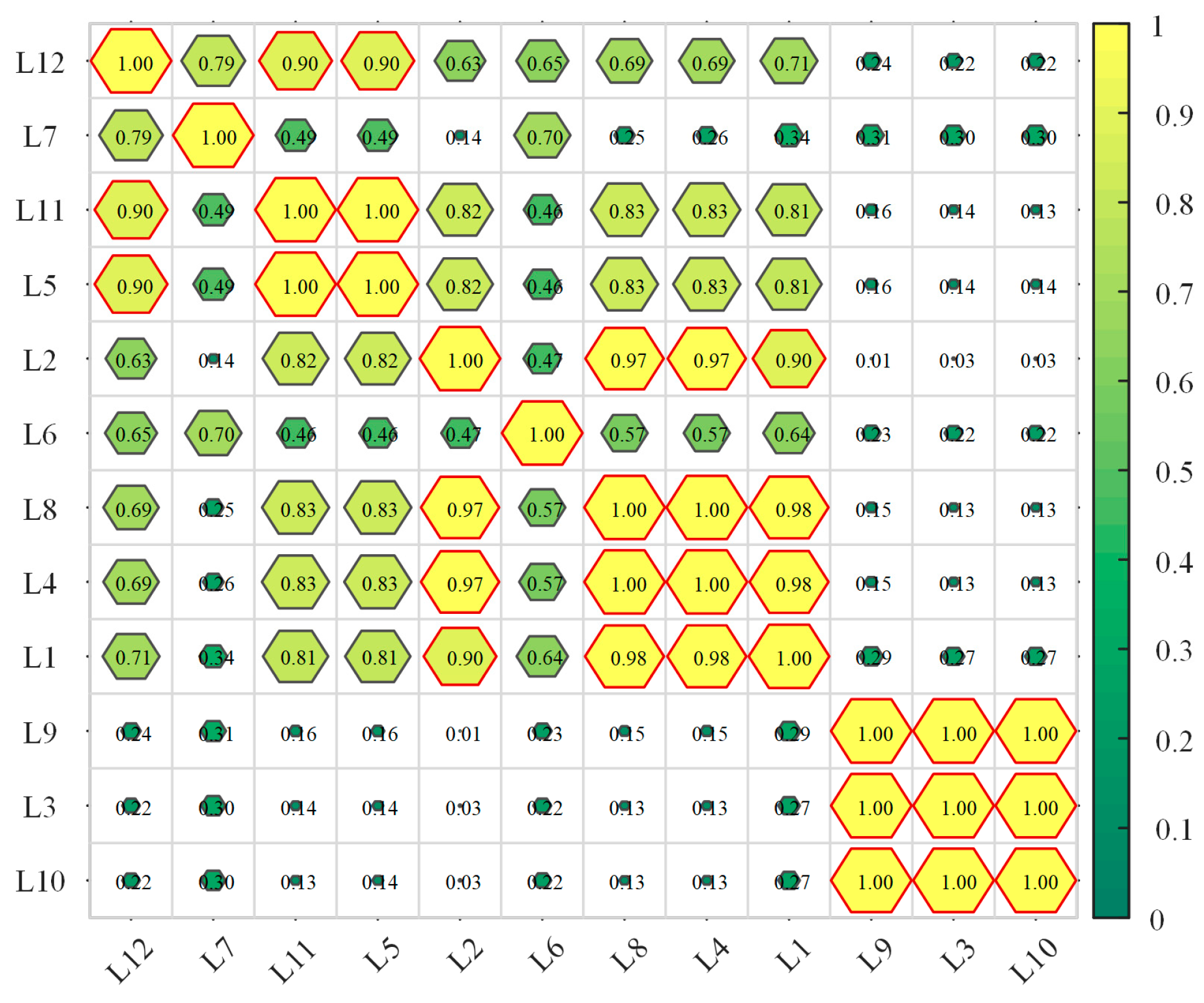
. However, it does not account for the correlation among features, which can lead to the inclusion of highly redundant features with strong correlations in the selected feature subset. To address this limitation, this paper proposes an improved feature selection method that builds upon the ReliefF algorithm and is enhanced by the Pearson correlation coefficient. After determining the weights of the original feature set, the algorithm conducts a correlation analysis on each feature prepared for inclusion in the selected feature subset, subsequently removing redundant features. This approach ensures that only the most relevant and significant features are retained in the final feature subset, thereby enhancing the accuracy and efficiency of subsequent training and processing. The flowchart of the algorithm is illustrated in
Figure 3.
The proposed ReliefF–Pearson algorithm first weights the features using the ReliefF algorithm to generate a sorted feature set. The highest-ranked feature is directly added to the selected feature subset. For subsequent features, the Pearson correlation coefficient between each feature and the existing feature subset is calculated. If this correlation exceeds a predefined threshold, the feature is discarded; otherwise, it is included in the selected feature subset.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}