

U-Space Contingency Management Based on Enhanced Mission Description


Abstract
:1. Introduction
1.1. Related Works
1.2. Contribution
2. Materials and Methods
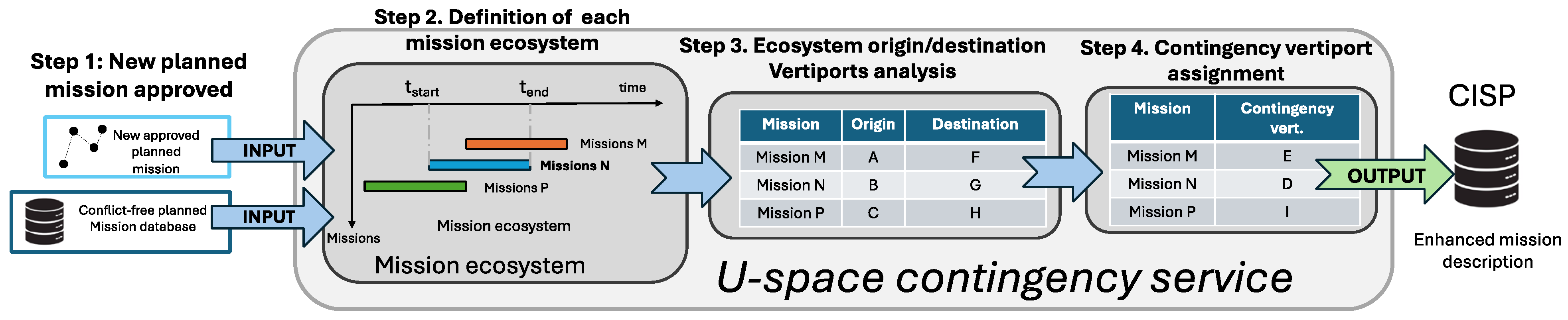
2.1. U-Space Contingency Service
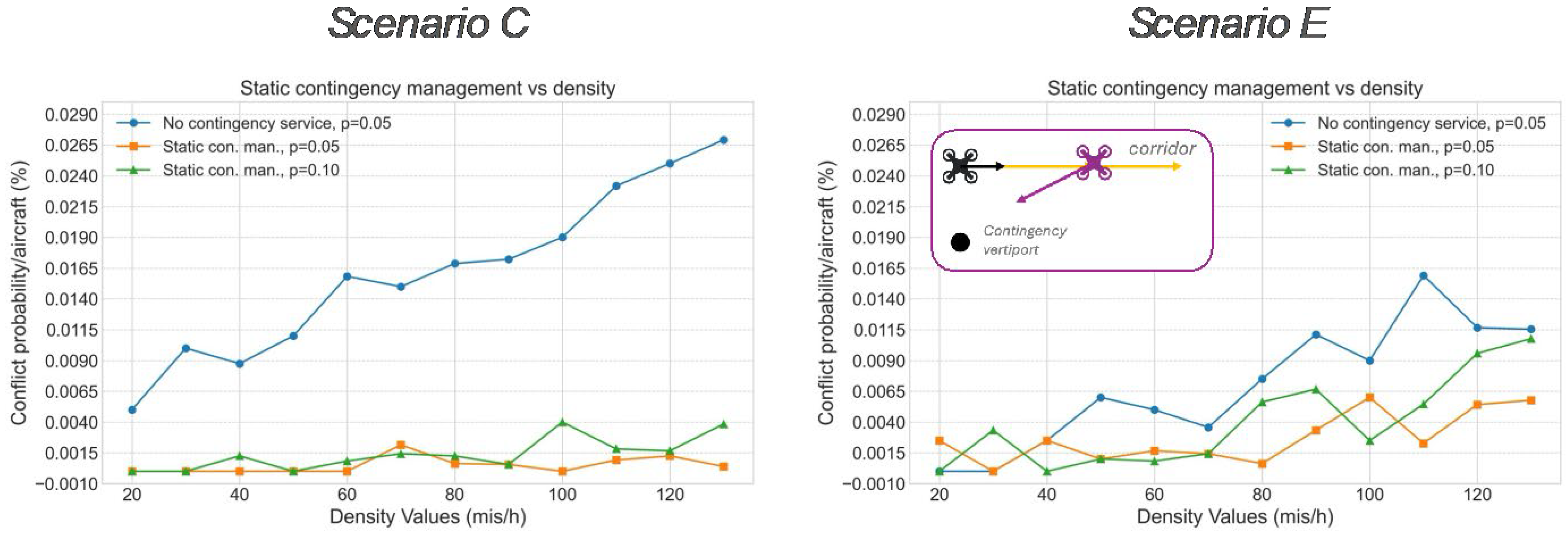
- A static vertiport assigner, which provides a single and fixed contingency vertiport to each mission of the ecosystem during the execution of the flight. This vertiport will be selected from the set of vertiports that will be flown over by the aircraft during the execution of its planned mission. It is also verified that the ecosystem members do not share a contingency vertiport.
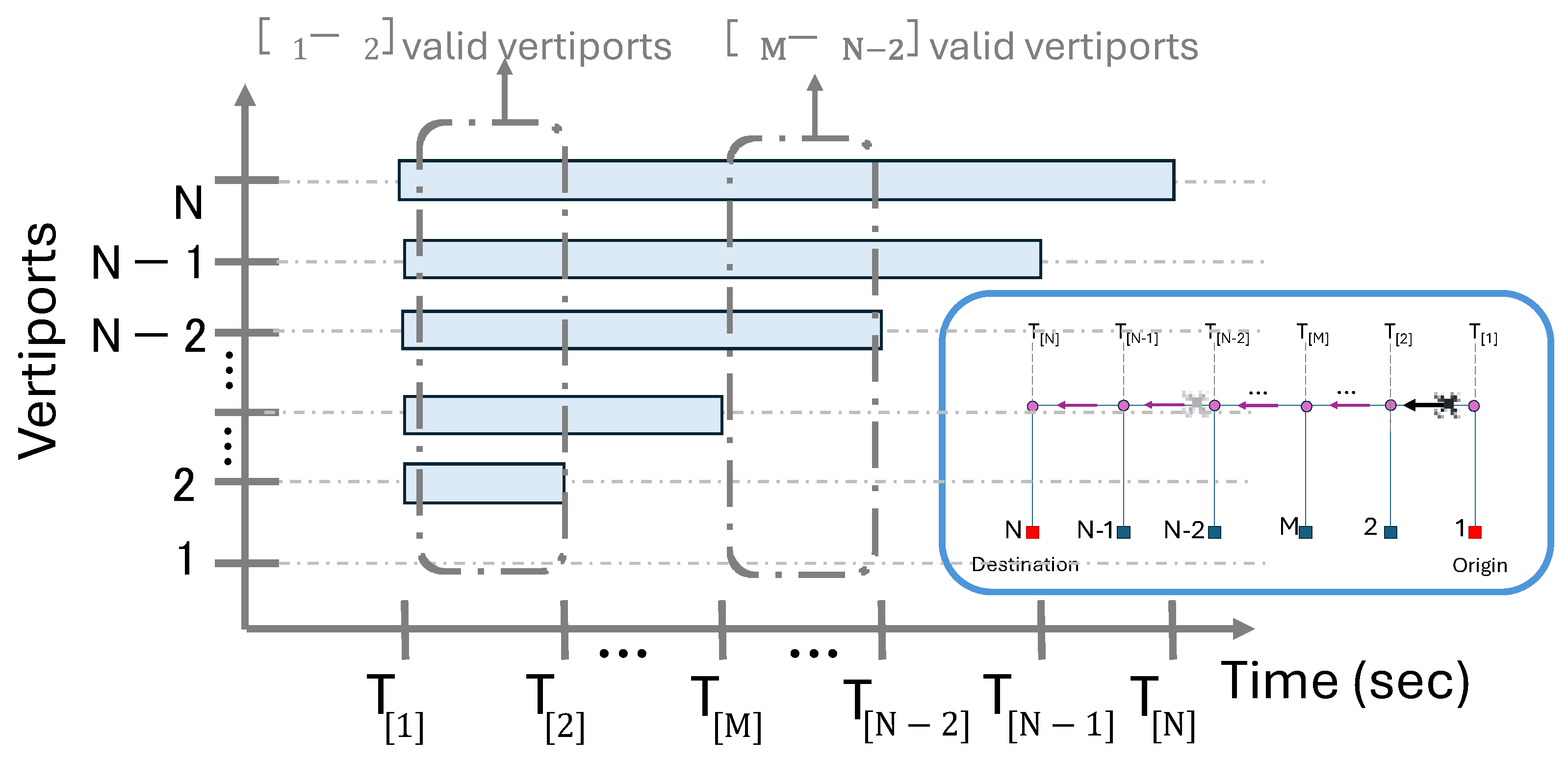
- A dynamic vertiport assigner, which provides a time-evolving contingency vertiport to each mission of the ecosystem that is valid during a time interval. To carry out this dynamic assignment, each aircraft is assigned the closest vertiport to its current position that will not be used for a takeoff or landing by a scheduled mission. In this way, the assigned contingency vertiport evolves along with the mission. Once again, it is verified that the ecosystem members do not share any contingency vertiports.
2.2. Simulation Framework
2.3. Scenario Definition
3. Results
3.1. Base Scenario Characterization
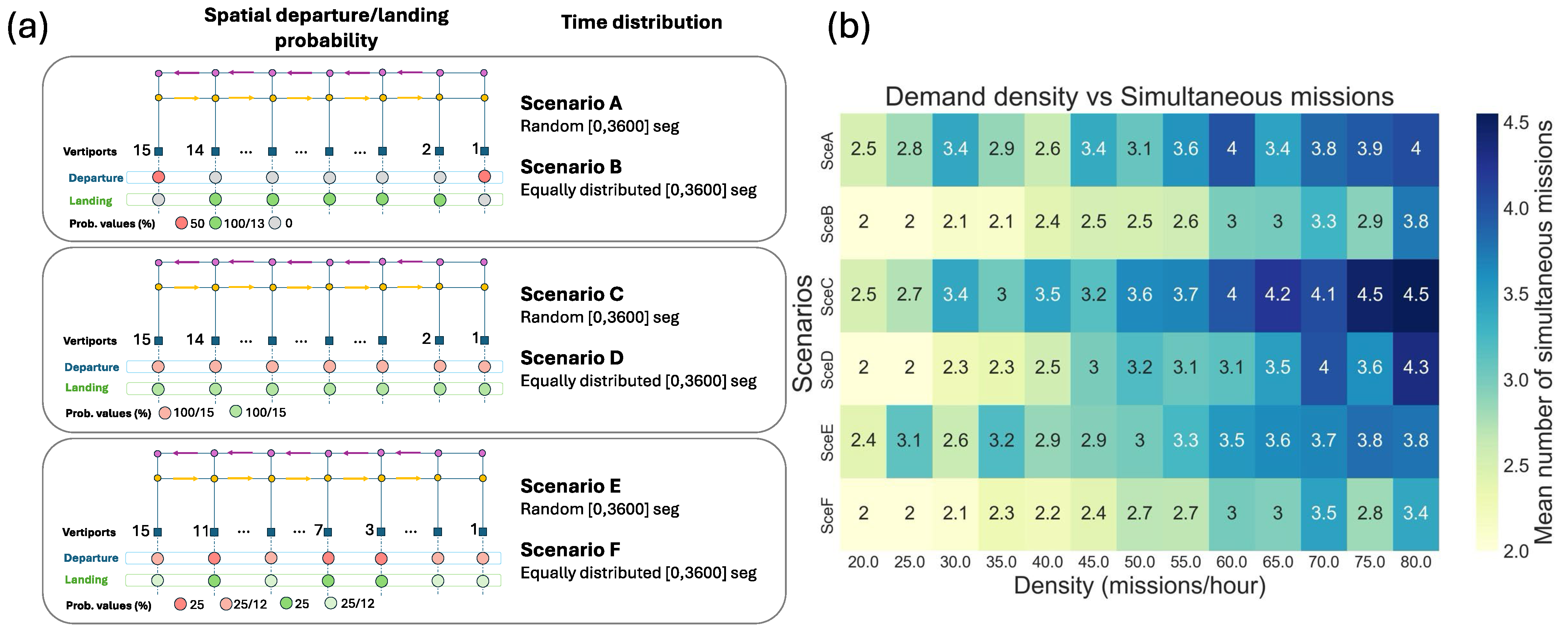
- Vertiport departure/landing probability. The schematic representation of the spatial departure/landing probability is shown in Figure 4a). The spatial traffic pattern, together with traffic density, will fix the number of flights that will begin and/or end the mission in each node of the graph (that models the airspace structure). As can be observed, three different spatial base scenarios are proposed:
- ○
- Scenario A and B: the probability of starting/ending a mission is equal in each node of the graph.
- ○
- Scenario C and D: the nodes located at the ends of the graph feed the traffic network.
- ○
- Scenario E and F: 75% of the missions generated in these scenarios will start/end in central nodes (nodes 3, 7, and 11).
- Mission start-time distribution. The starting time of the mission can be randomly defined during the scenario duration or can be forced to be equally distributed during the entire runtime of the scenario.
- Dangerous systems: the risk of an accident is greater than one accident per 1000 operations (i.e., 1 × 10−3).
- Regulated systems: the risk of an accident is between 1 × 10−3 and 1 × 10−5 per operation.
- Ultra-safe systems: the risk of an accident is set between 1 × 10−5 and 1 × 10−7 per operation. Examples of these systems are the nuclear industry or ATM.
3.2. Static Contingency Management
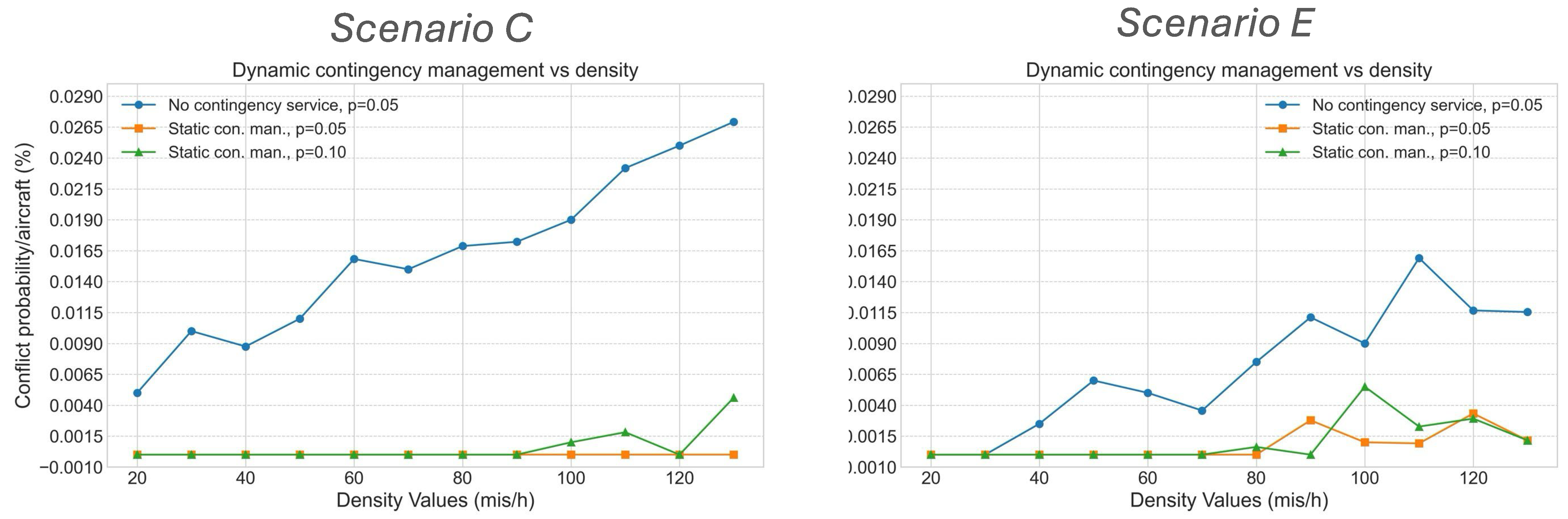
3.3. Dynamic Contingency Management
- All nodes/vertiports to be flown over during the execution of each mission in the ecosystem are identified, including the origin and destination nodes.
- The time required to reach each vertiport during the execution of a mission is calculated, providing each vertiport a valid time interval to be considered as a contingency vertiport. The validity interval of each vertiport is determined by the mission start time and the time needed to reach its coordinates. It is important to note that once a vertiport is passed, executing an RTL maneuver directed toward that vertiport would result in a change of direction (opposite to the corridor path), potentially generating conflicts with the planned traffic within the corridor.
- The algorithm responsible for assigning a contingency vertiport to each ecosystem member will not only ensure that the ecosystem members cannot share a contingency vertiport but also will take into account the validity interval of each vertiport. Therefore, the enhanced mission description of each planned flight will be composed of a set of contingencies, each valid for a specific time interval.
- Additionally, it prevents the assignment of vertiports where, in the event of simultaneous contingencies involving several aircraft, one aircraft would need to overtake the other.
4. Discussion
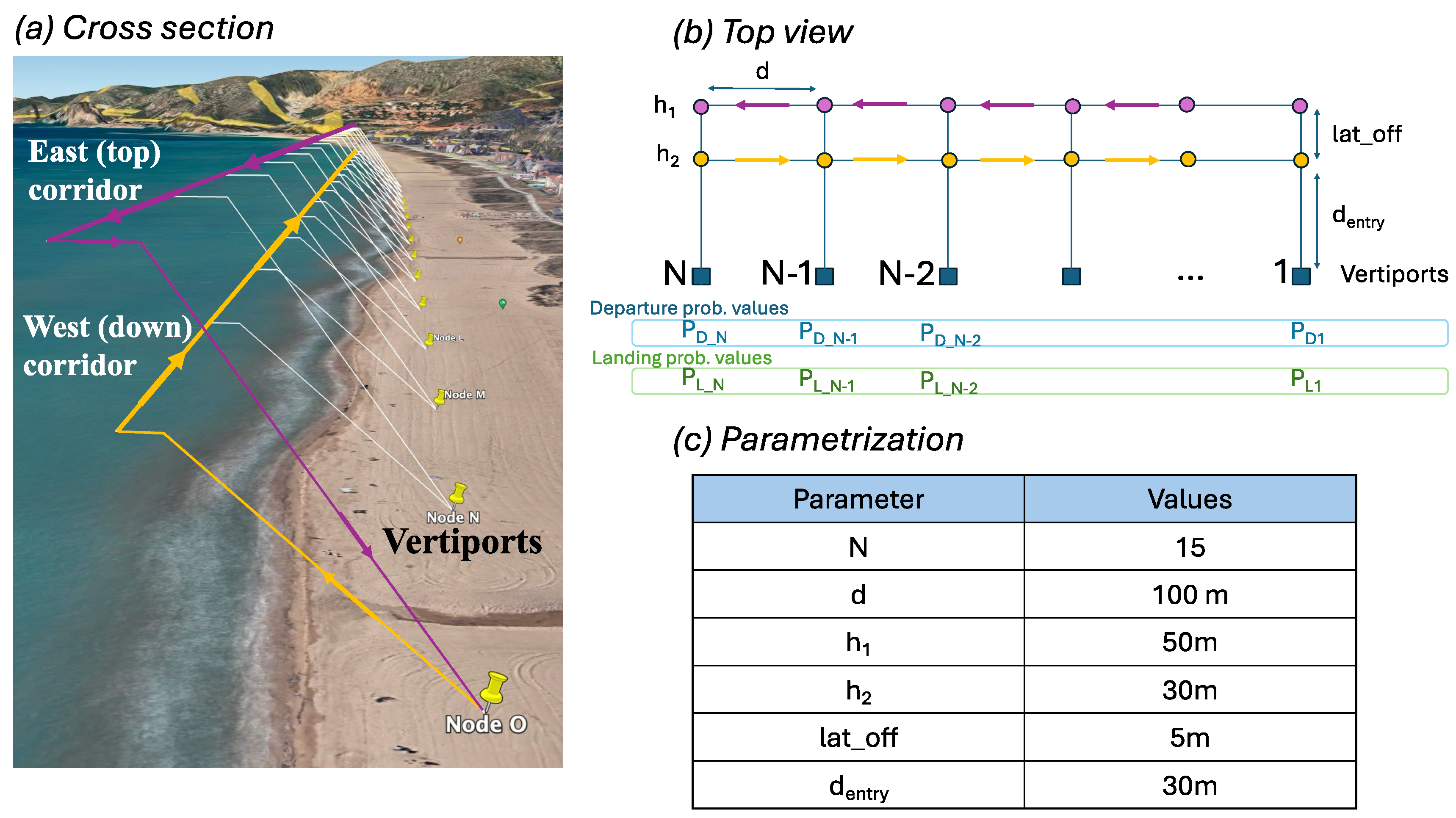
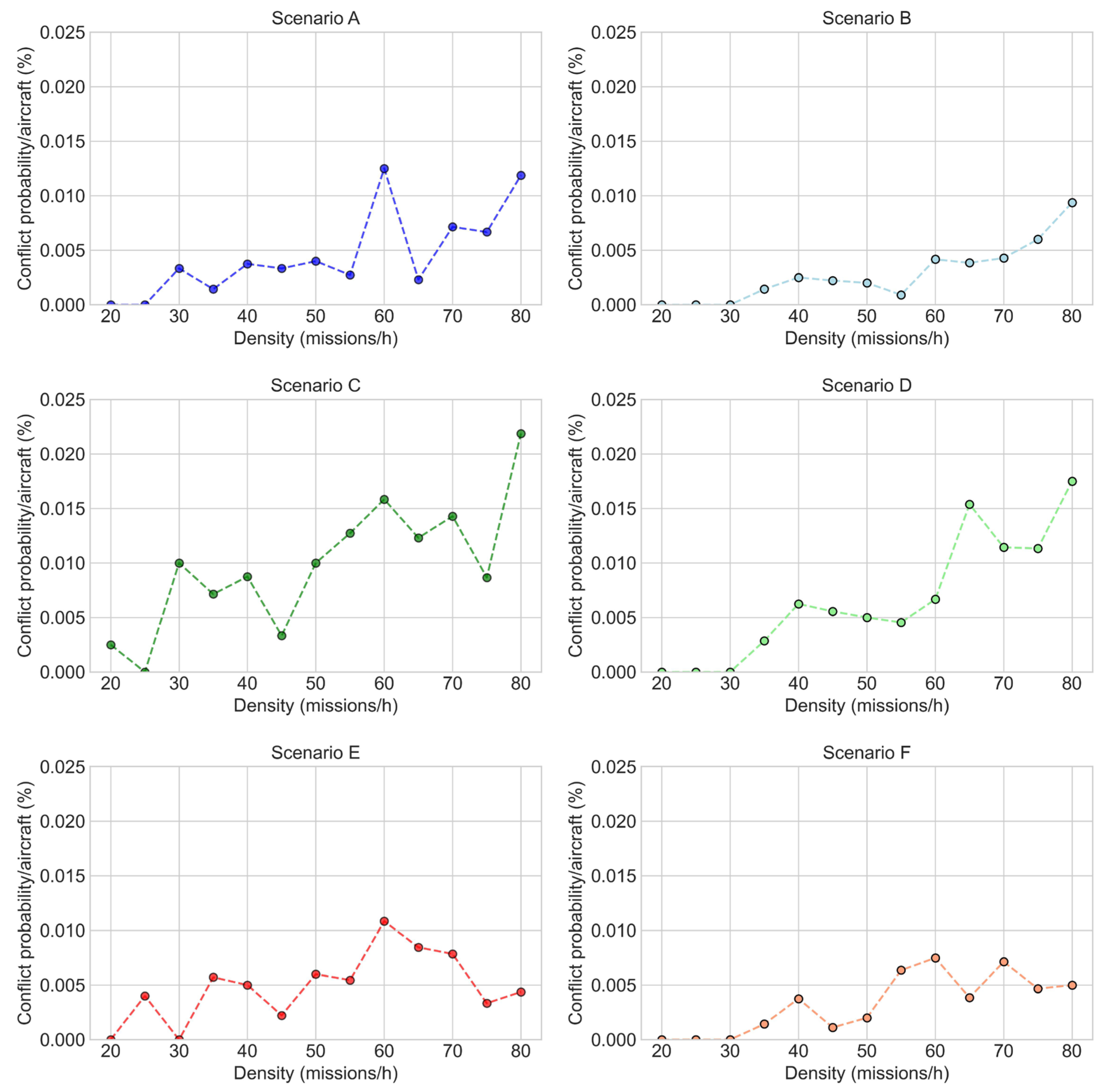
- As demonstrated during the characterization of the potential scenarios, prior to the integration of the new contingency service, U-space high safety levels are deeply linked to demand capacity balance (DCB) and strategic deconflicting analysis. It has been proven how current contingency maneuvers based on RTL are a safe and valid solution at low traffic-density demand when departures are properly distributed temporally by strategic conflict-resolution services. As highlighted in Figure 5, scenarios B, D, and F can be classified as USSs (facing RTL contingency) for traffic density lower than 30 missions/hour if the departures are coordinated (equally distributed during the characterization time interval). A DCB analysis of the planned traffic, characterizing the spatial hotspot and traffic density, will be the first indicator that it is necessary to apply advanced methodologies or new procedures to manage the contingency procedures. The DCB analysis will also set the contingency service approach (static or dynamic) that will be valid considering the foreseen demand. It is also important to emphasize that the results obtained depend greatly on the designed airspace structure (parameters shown in Figure 3c), and the analysis conducted must be specific to each possible configuration.
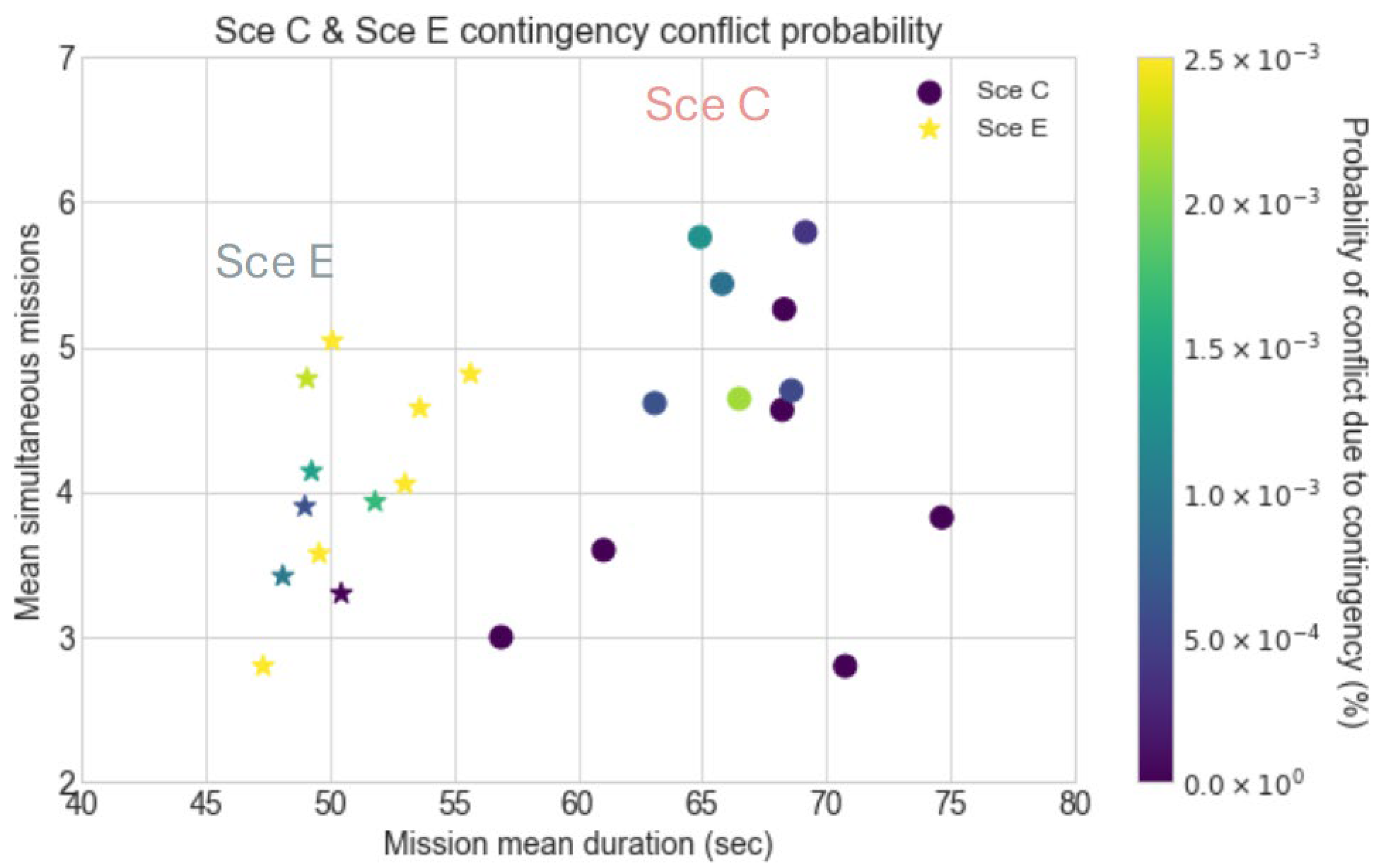
- An airspace structure based on corridors has been used to characterize the impact of contingency, but the results obtained can be extrapolated to other potential airspace configurations like free routing, layers, or zones [25]. As analyzed in Figure 6a), the scenarios with high-demand vertiports will generate a significant number of RTL conflicts. Therefore, the methodology to assign an alternative contingency vertiport will solve a considerable number of conflicts, regardless of the airspace structure. However, the definition of the trajectories that will guide the aircraft to the assigned vertiport requires a more exhaustive characterization. Corridors are the most restrictive airspace structures in terms of spatial distribution, and in this case, they offer an advantage, as they can be anticipated as sections of the U-space volume that will not contain planned missions. To extrapolate the solution to other airspace structure configurations, it will be necessary to analyze the portion of the airspace volumes that are not going to be used (or predefining them) to define the trajectory to reach the contingency vertiport during the RTL maneuver.
- The static contingency service, which assigns a single contingency vertiport for the entire duration of each specific mission, has also proven to be a good alternative to those scenarios that present moderate traffic densities (lower than 60 missions/h in the characterized scenarios). As shown in Figure 9, its effectiveness will strongly depend on the traffic pattern, the average number of members in each ecosystem, and the density of vertiports available in the network. Once again, it has been proven that the parametrization of the U-space service cannot be decoupled from the traffic analysis pattern and the design of the airspace structure.
- The dynamic contingency U-space service has proven to be an excellent solution for enhancing U-space volumes safety in high-density scenarios. As summarized in Figure 11 and Table 1, at low contingency probability, the integration of this new service creates USS airspaces. Since the event triggering the contingency procedures does not impact the capabilities of the aircraft to fly (like CNS coverage issues or low battery state), airspaces that offer robust and detailed characterization (CNS coverage map or weather information) are strong candidates for integrating the dynamic contingency service to enhance system safety.
- Note that an alternative for handling contingency procedures is a network of dedicated contingency vertiports that do not provide any additional service other than serving as safe landing spots in case of emergency. The contingency vertiport network cartography would need to be characterized to ensure that their locations comply with the design rules and technical requirements [26,27]. The dimensions required to place the infrastructure according to aircraft dimensions, obstacle-free volume (OFV), and final approach and take-off area (FATO) will constrain the potential locations where a vertiport could be placed, but note that this additional infrastructure will have an important economic impact. What additional investment will be required to have a safe, dedicated network of contingency vertiports? As an alternative, the implementation and integration of the defined contingency service will just require an onboard control system (already available in commercial UAVs) capable of managing alternative landing points to be preloaded before the mission starts.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-space concept of operations: A key enabler for opening airspace to emerging low-altitude operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef]
- U-Space Airspace Risk Assessment. Method and Guidelines—Volume 1; Edition 1.0; Eurocontrol: Brussels, Belgium, April 2023.
- Kopardekar, P. Safely Enabling UAS Operations in Low-Altitude Airspace (No. ARC-E-DAA-TN45964); NASA: Washington, DC, USA, 2017. [Google Scholar]
- U-Space Concept of Operations (CONOPS), 4th ed.; SESAR: Brussels, Belgium, 2023.
- Reyes-Muñoz, A.; Barrado, C.; Pastor, E.; Royo, P. ATC Human Factors Involved in RPAS Contingency Management in Non-Segregated Airspace. Appl. Sci. 2023, 13, 1408. [Google Scholar] [CrossRef]
- Pastor, E.; Royo, P.; Santamaria, E.; Prats, X.; Barrado, C. In-flight contingency management for unmanned aerial vehicles. J. Aerosp. Comput. Inf. Commun. 2012, 9, 144–160. [Google Scholar] [CrossRef]
- Grüter, B.; Seiferth, D.; Bittner, M.; Holzapfel, F. Emergency flight planning using voronoi diagrams. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1056. [Google Scholar]
- Ayhan, B.; Kwan, C.; Budavari, B.; Larkin, J.; Gribben, D. Preflight contingency planning approach for fixed wing UAVs with engine failure in the presence of winds. Sensors 2019, 19, 227. [Google Scholar] [CrossRef] [PubMed]
- Atkins, E. Emergency landing automation aids: An evaluation inspired by US airways flight 1549. In Proceedings of the AIAA Infotech@ Aerospace, Atlanta, GA, USA, 20–22 April 2010. AIAA–2010-3381. [Google Scholar]
- Boskovic, J.D.; Prasanth, R.; Mehra, R.K. A multi-layer autonomous intelligent control architecture for unmanned aerial vehicles. J. Aerosp. Comput. Inf. Commun. 2004, 1, 605–628. [Google Scholar] [CrossRef]
- Theodore, C.; Rowley, D.; Ansar, A.; Matthies, L.; Goldberg, S.; Hubbard, D.; Whalley, M. Flight trials of a rotorcraft unmanned aerial vehicle landing autonomously at unprepared sites. In Annual Forum Proceedings-American Helicopter Society; Vertical Flight Society (VFS): Fairfax, VA, USA, 2006; p. 1250. [Google Scholar]
- Patterson, T.; McClean, S.; Morrow, P.; Parr, G.; Luo, C. Timely autonomous identification of UAV safe landing zones. Image Vis. Comput. 2014, 32, 568–578. [Google Scholar] [CrossRef]
- Li, S.; Egorov, M.; Kochenderfer, M. Optimizing collision avoidance in dense airspace using deep reinforcement learning. arXiv 2019, arXiv:1912.10146. [Google Scholar]
- Pang, B.; Dai, W.; Ra, T.; Low, K.H. A concept of airspace configuration and operational rules for UAS in current airspace. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–9. [Google Scholar]
- Chin, C.; Gopalakrishnan, K.; Balakrishnan, H.; Egorov, M.; Evans, A. Protocol-based congestion management for advanced air mobility. J. Air Transp. 2023, 31, 35–44. [Google Scholar] [CrossRef]
- Ribeiro, M.; Ellerbroek, J.; Hoekstra, J. Review of conflict resolution methods for manned and unmanned aviation. Aerospace 2020, 7, 79. [Google Scholar] [CrossRef]
- Lappas, V.; Kostopoulos, V.; Zoumponos, G. EuroDRONE, a european UTM testbed for U-Space. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Liu, Z.; Munoz-Gamarra, J.L.; Ramos Gonzalez, J.J. Characterization of Strategic Deconflicting Service Impact on Very Low-Level Airspace Capacity. Drones 2024, 8, 426. [Google Scholar] [CrossRef]
- Munoz-Gamarra, J.L.; Ramos, J.J.; Liu, Z.; Sobejano, A. Impact of USSPs performance in shared U-space volumes. In Proceedings of the SESAR Innovation Days, Seville, Spain, 27–30 November 2023. [Google Scholar]
- Puchol, C.C.; Vélez, N.V.; Tejedor, J.V.B.; Vila Carbó, J.A. BUBBLES: A new concept of operations for separation management in the U-space. J. Phys. Conf. Ser. 2023, 2526, 012092. [Google Scholar] [CrossRef]
- Rahman, M.F.; Ellerbroek, J.; Hoekstra, J.M. Effect of CNS Systems Performance on Autonomous Separation in U-Space. In Proceedings of the International Conference on Research in Air Transportation, Singapore, 1–4 July 2024. [Google Scholar]
- Lin, X.G.; Fulton, N.; Westcott, M.; Lin, X. Target Level of Safety Measures in Air Transportation-Review, Validation and Recommendations. 2009. Available online: https://www.researchgate.net/publication/265251293 (accessed on 12 October 2019).
- Pfisterer, H. European Regulation of Aerodrome Safety Managment Systems in the EASA System; Kassel University Press GmbH: Kassel, Germany, 2017; Volume 21. [Google Scholar]
- Amalberti, R. The paradoxes of almost totally safe transportation systems. In Human Error in Aviation; Routledge: Abingdon, UK, 2017; pp. 101–118. [Google Scholar]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.; Vidosavljevic, A.; Arntzen, M.; Bussink, F.; Nieuwenhuisen, D. Analysis of airspace structure and capacity for decentralized separation using fast-time simulations. J. Guid. Control Dyn. 2017, 40, 38–51. [Google Scholar] [CrossRef]
- Vertiports Prototype Technical Specifications for the Design of VFR Vertiports for Operation with Manned VTOL-Capable Aircraft Certified in the Enhanced Category (PTS-VPT-DSN); EASA: Cologne, Germany, 2022.
- Urban Air Mobility (UAM) Concep of Operations v2.0; Federal Aviation Administration: Washington, DC, USA, April 2023. Available online: https://www.faa.gov/sites/faa.gov/files/Urban%20Air%20Mobility%20%28UAM%29%20Concept%20of%20Operations%202.0_1.pdf (accessed on 26 April 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Density (m/h) | Static (p = 0.05) | Static (p = 0.10) | Dynamic (p = 0.05) | Dynamic (p = 0.10) |
|---|---|---|---|---|---|
| Scenario C | 50 | USS | USS | USS | USS |
| 80 | 6.25 × 10−4 | 1.25 × 10−3 | USS | USS | |
| 130 | 3.84 × 10−4 | 3.84 × 10−3 | USS | 4.61 × 10−3 | |
| Scenario E | 50 | 1.00 × 10−3 | 1.00 × 10−3 | USS | USS |
| 80 | 6.15 × 10−4 | 5.62 × 10−3 | USS | 6.05 × 10−4 | |
| 130 | 5.70 × 10−3 | 1.07 × 10−2 | 1.15 × 10−3 | 1.15 × 10−3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munoz-Gamarra, J.L.; Ramos, J.J.; Liu, Z. U-Space Contingency Management Based on Enhanced Mission Description. Aerospace 2024, 11, 876. https://doi.org/10.3390/aerospace11110876
Munoz-Gamarra JL, Ramos JJ, Liu Z. U-Space Contingency Management Based on Enhanced Mission Description. Aerospace. 2024; 11(11):876. https://doi.org/10.3390/aerospace11110876
Chicago/Turabian StyleMunoz-Gamarra, Jose L., Juan J. Ramos, and Zhiqiang Liu. 2024. "U-Space Contingency Management Based on Enhanced Mission Description" Aerospace 11, no. 11: 876. https://doi.org/10.3390/aerospace11110876
APA StyleMunoz-Gamarra, J. L., Ramos, J. J., & Liu, Z. (2024). U-Space Contingency Management Based on Enhanced Mission Description. Aerospace, 11(11), 876. https://doi.org/10.3390/aerospace11110876