
Rendezvous and Proximity Operations in Cislunar Space Using Linearized Dynamics for Estimation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background Materials and Methods
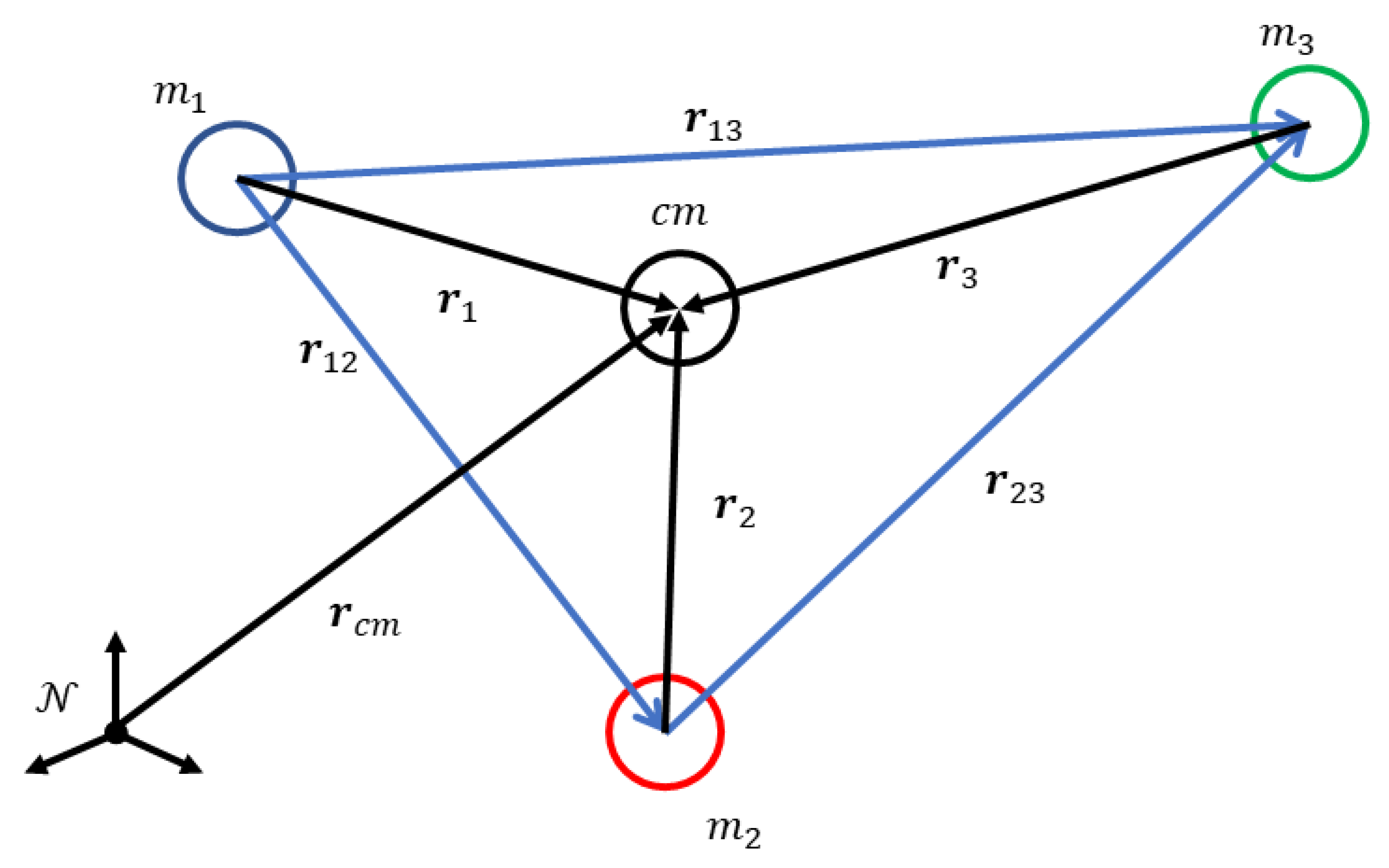
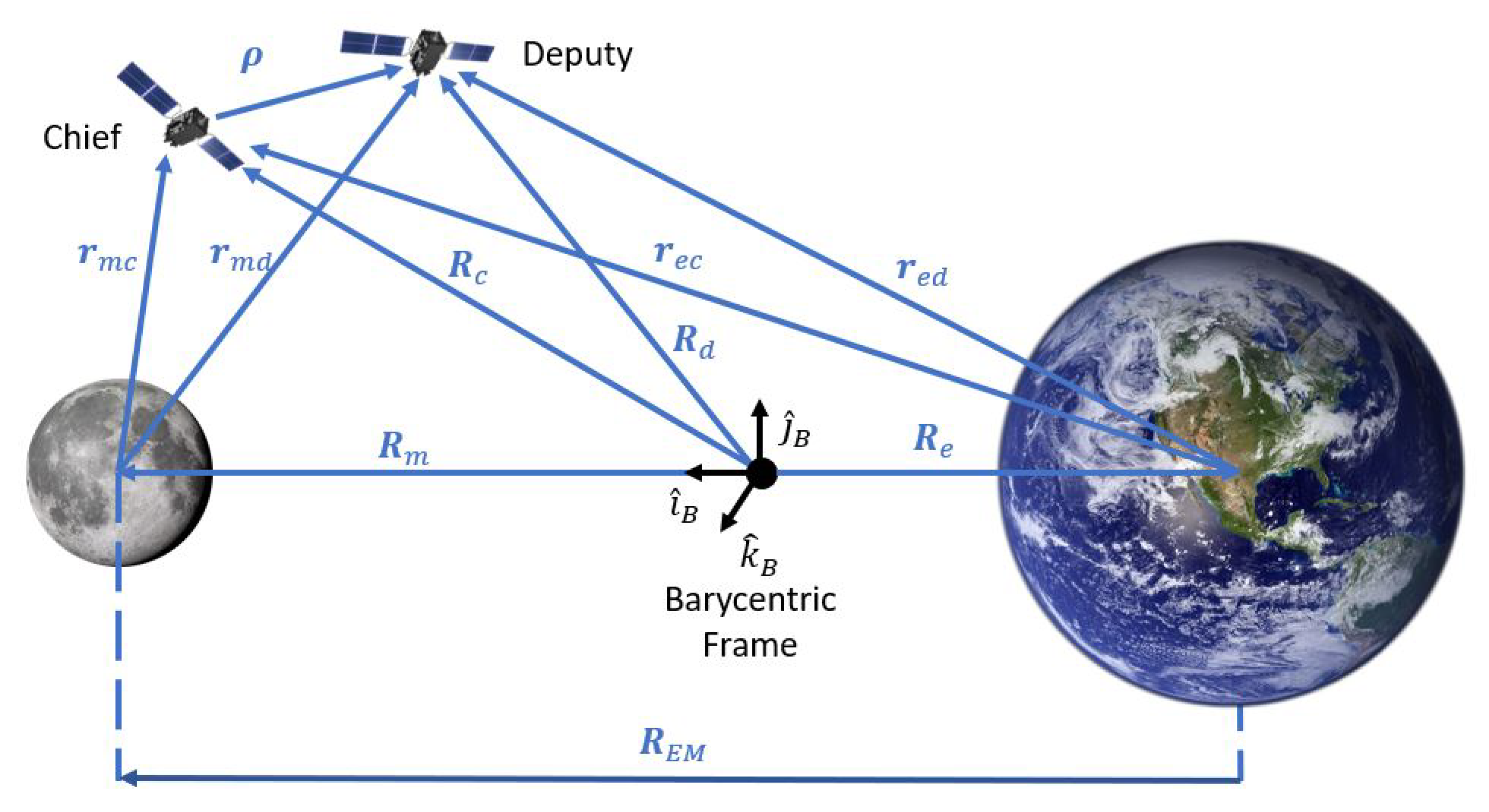
2.1. Three-Body Dynamics
2.1.1. Single Spacecraft
- Time t is non-dimensionalized by the system mean motion n:where, a is the semi-major axis of the moon. The non-dimensional time quantity is also introduced, such that:
- Mass quantities are non-dimensionalized such that:The system mass parameter is also defined as: , which makes:
- Distances are non-dimensionalized by the semi-major axis a of the moon:denotes a non-dimensional quantity and its derivative with respect to the non-dimensional time
- Angular velocities are non-dimensionalized as follows.
- The non-dimensional angular velocity for the barycentric frame .
- The distance between the moon and earth () is constant and therefore:
2.1.2. Relative Motion Equations
2.1.3. Linear Relative Equations of Motion
2.1.4. Matrix Exponential Solution
2.2. State Estimation
2.2.1. Linear Estimation Model (Kalman Filter)
2.2.2. Non-Linear Estimation Model (Unscented Kalman Filter)
2.3. Controller Design
3. Simulation Results
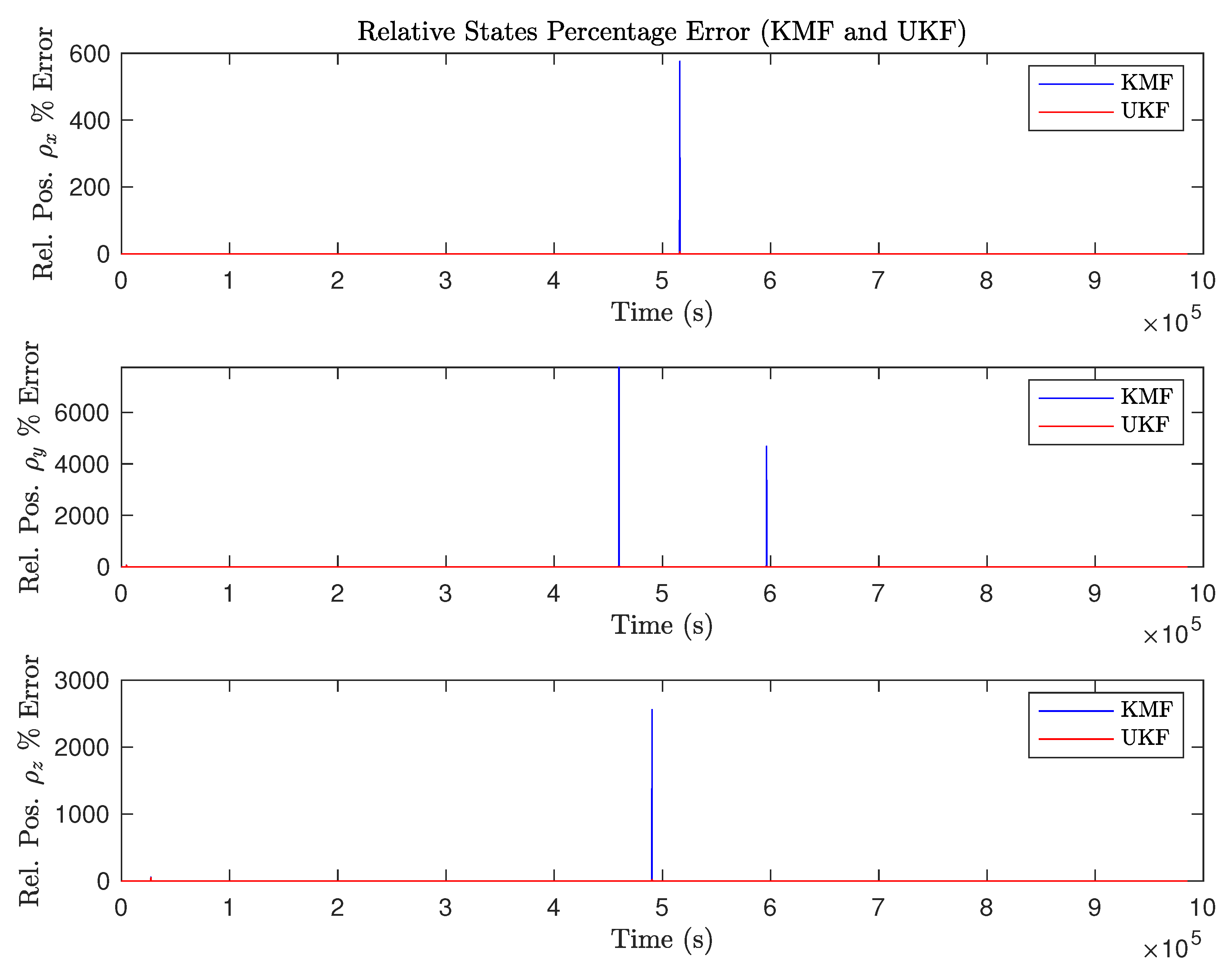
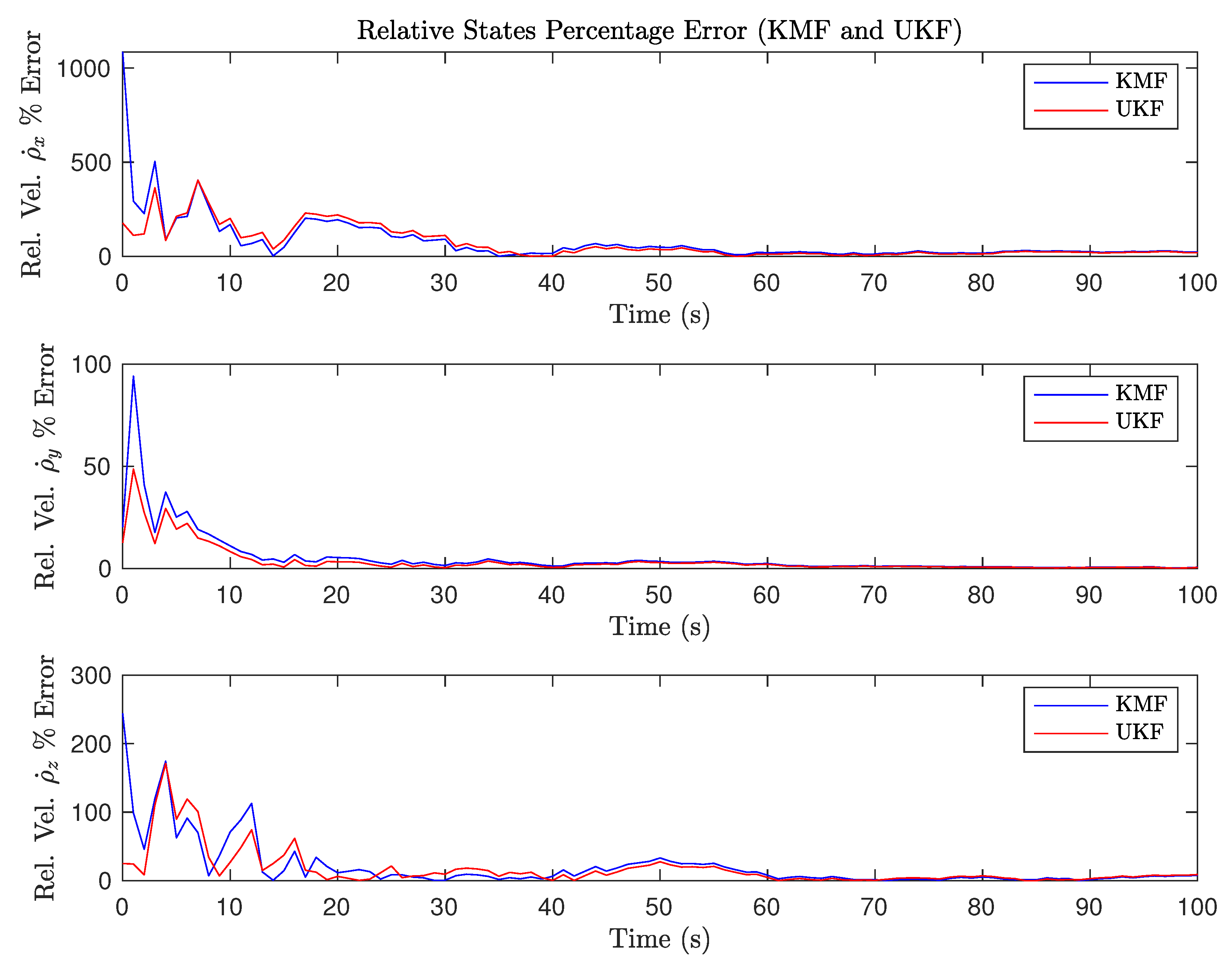
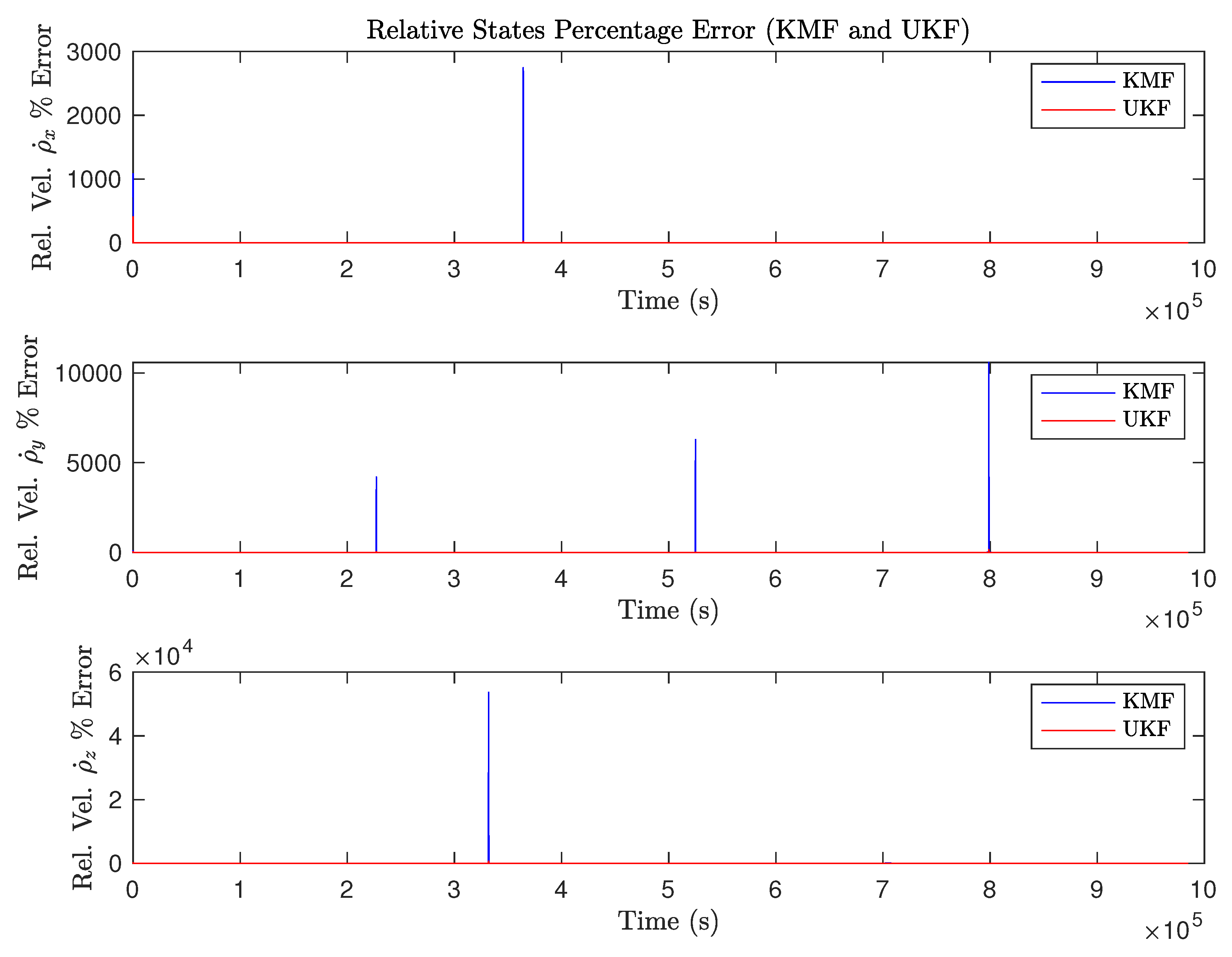
3.1. State Estimation Results
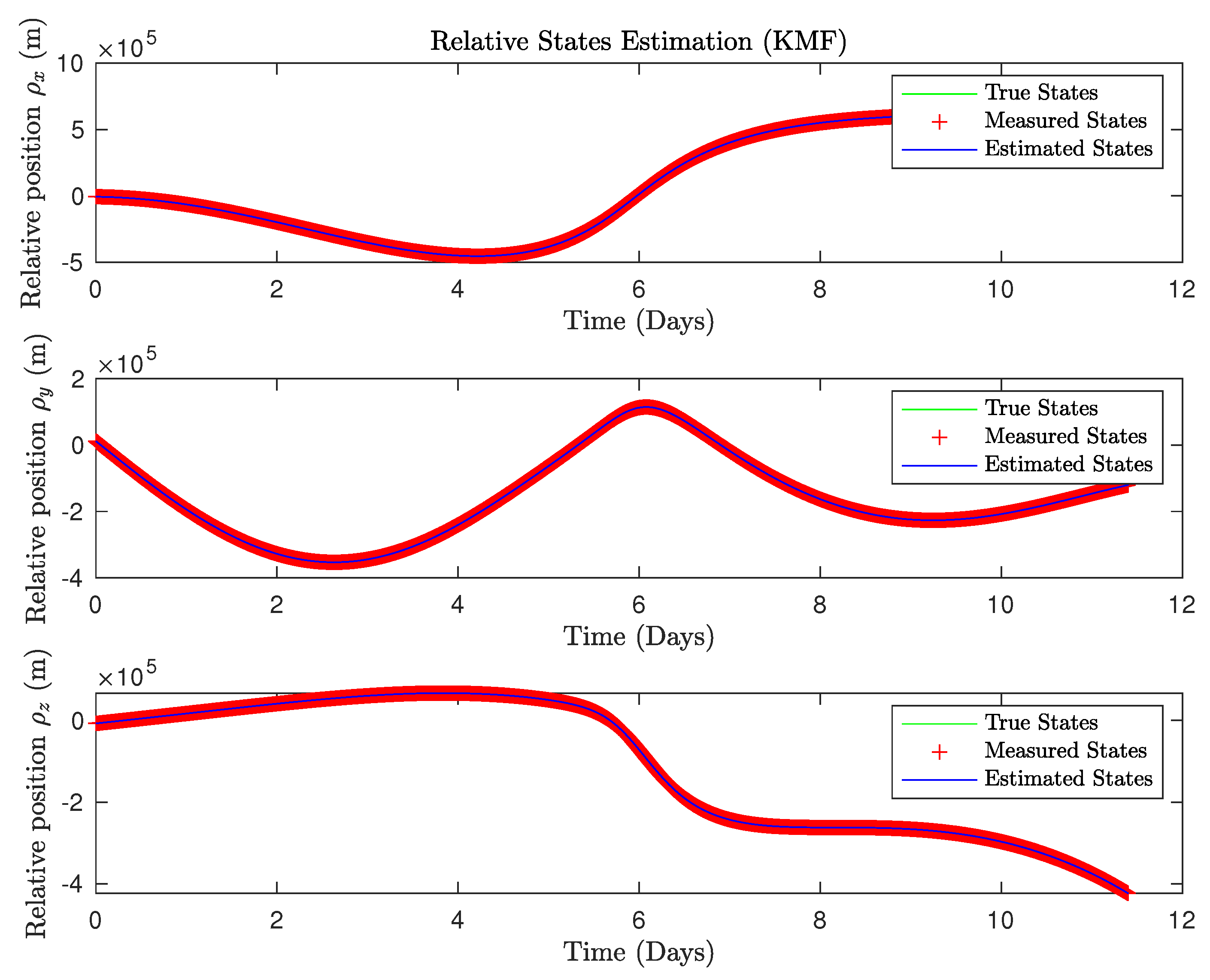
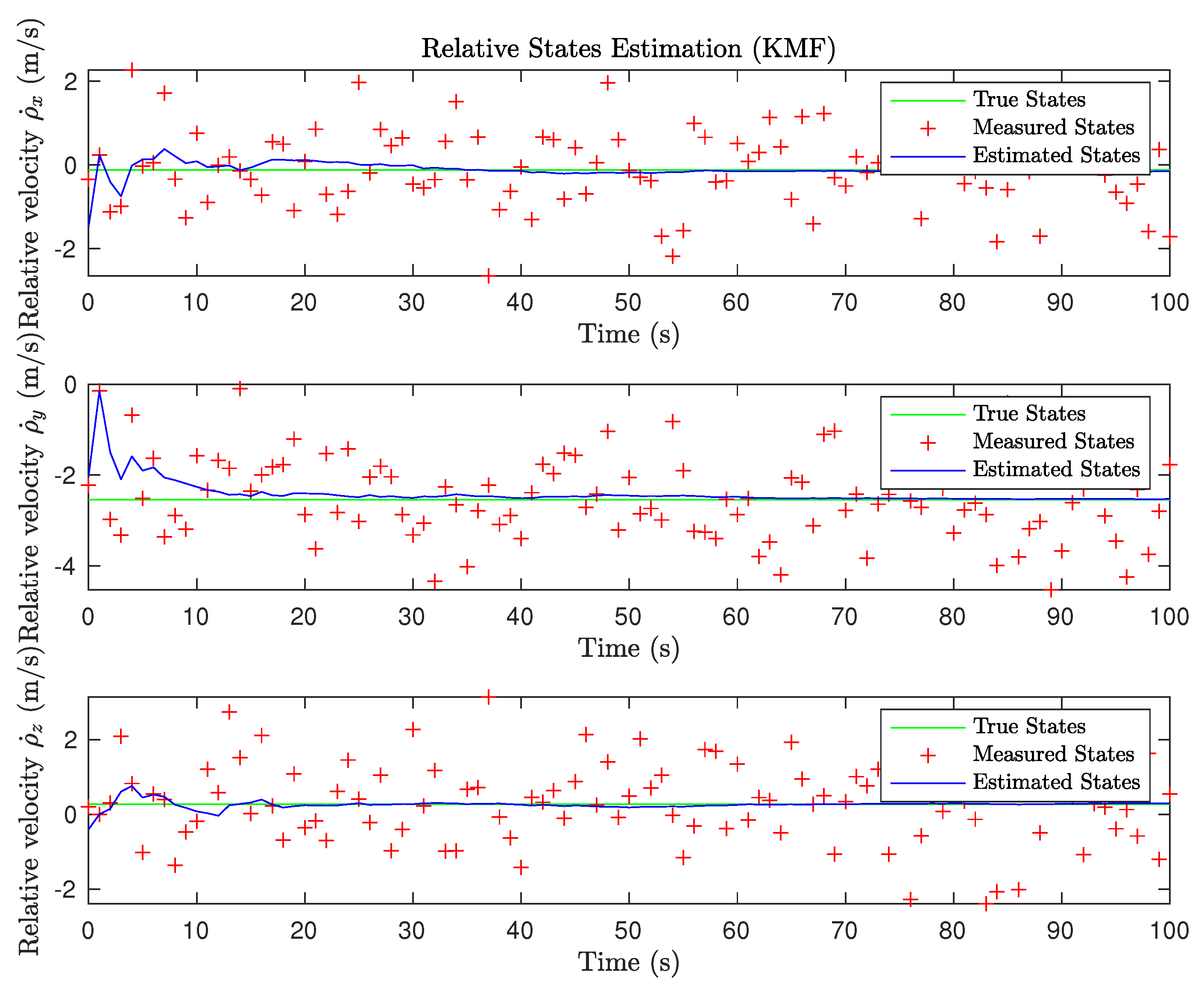
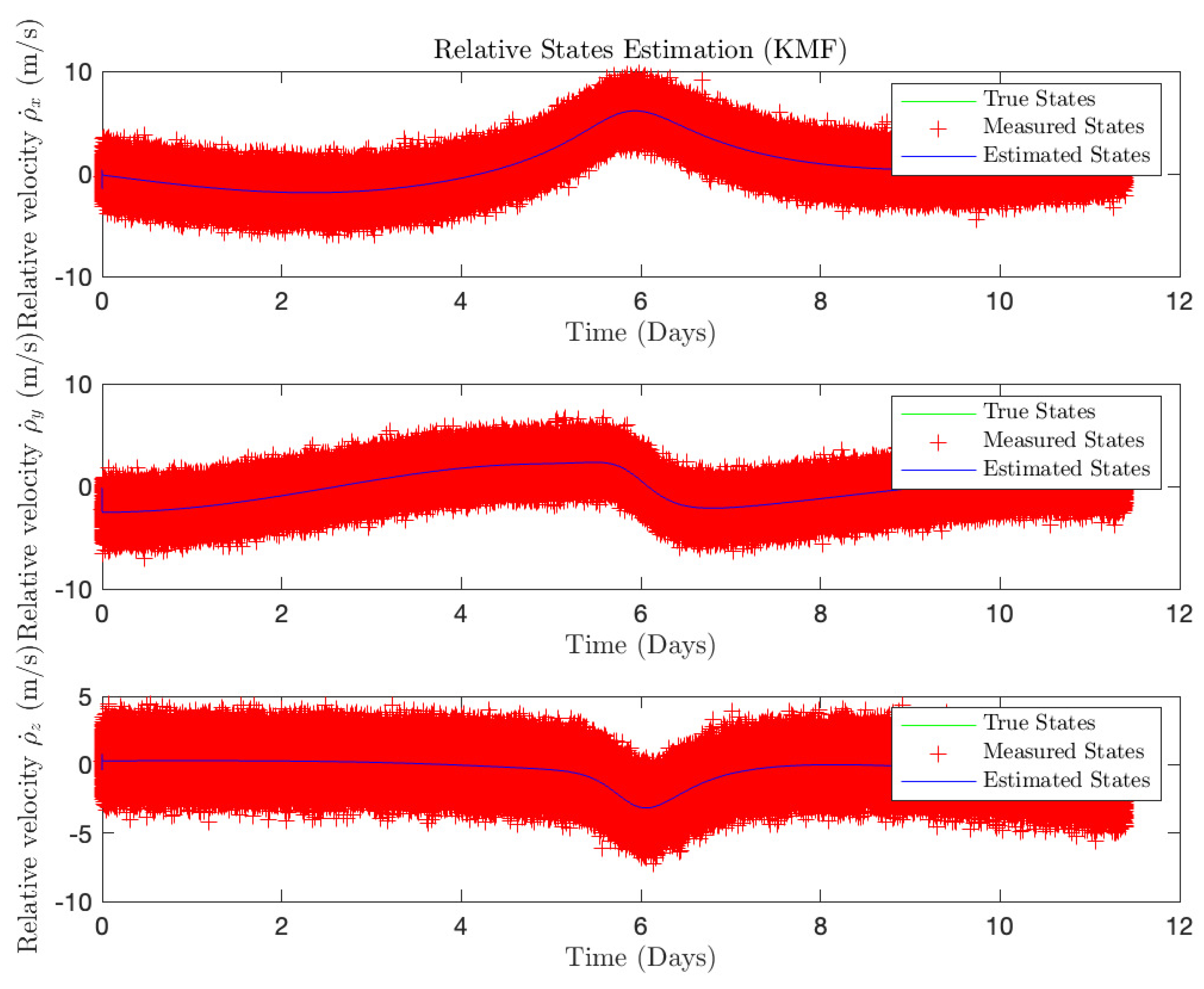
3.1.1. Linear Estimation Results (KMF)
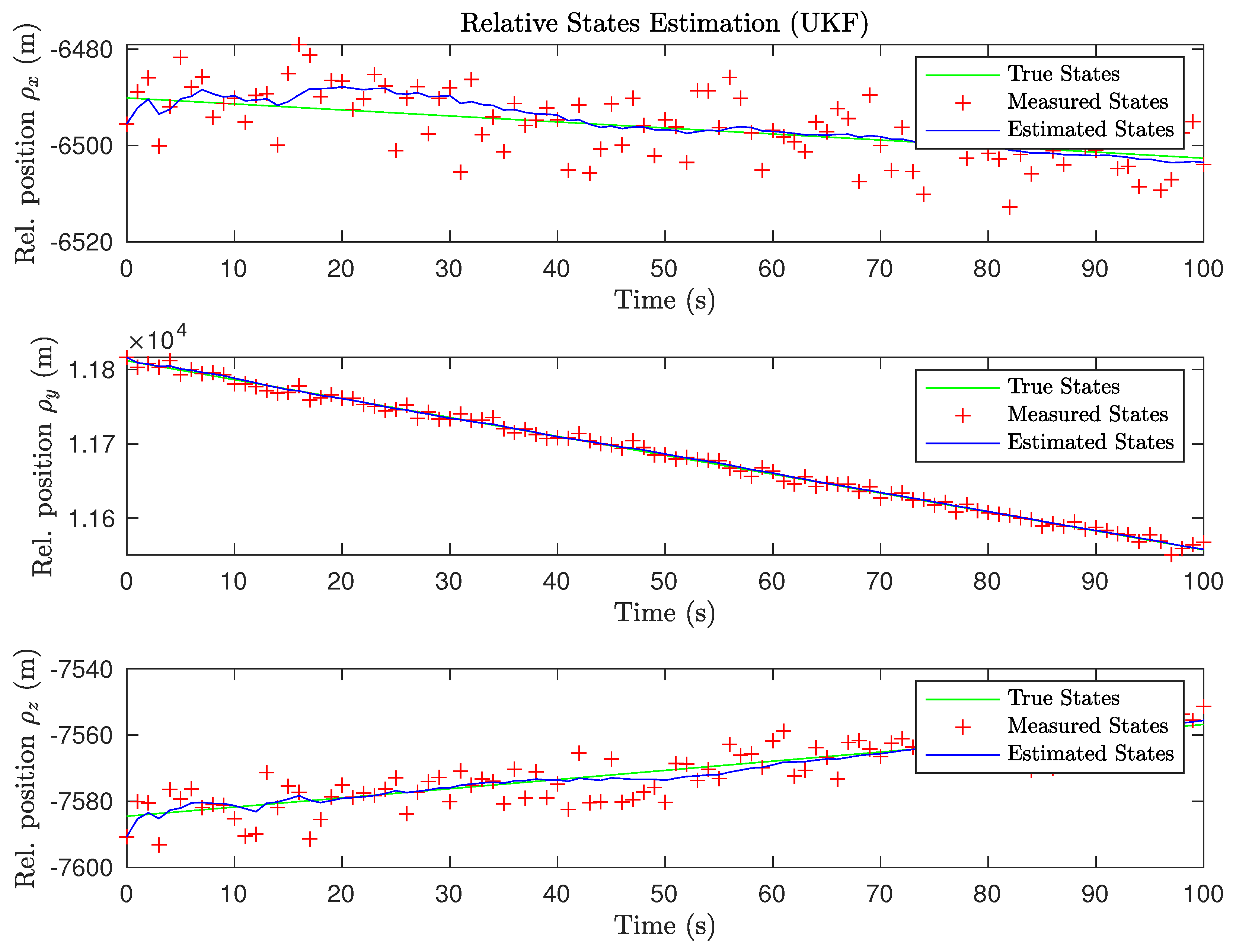
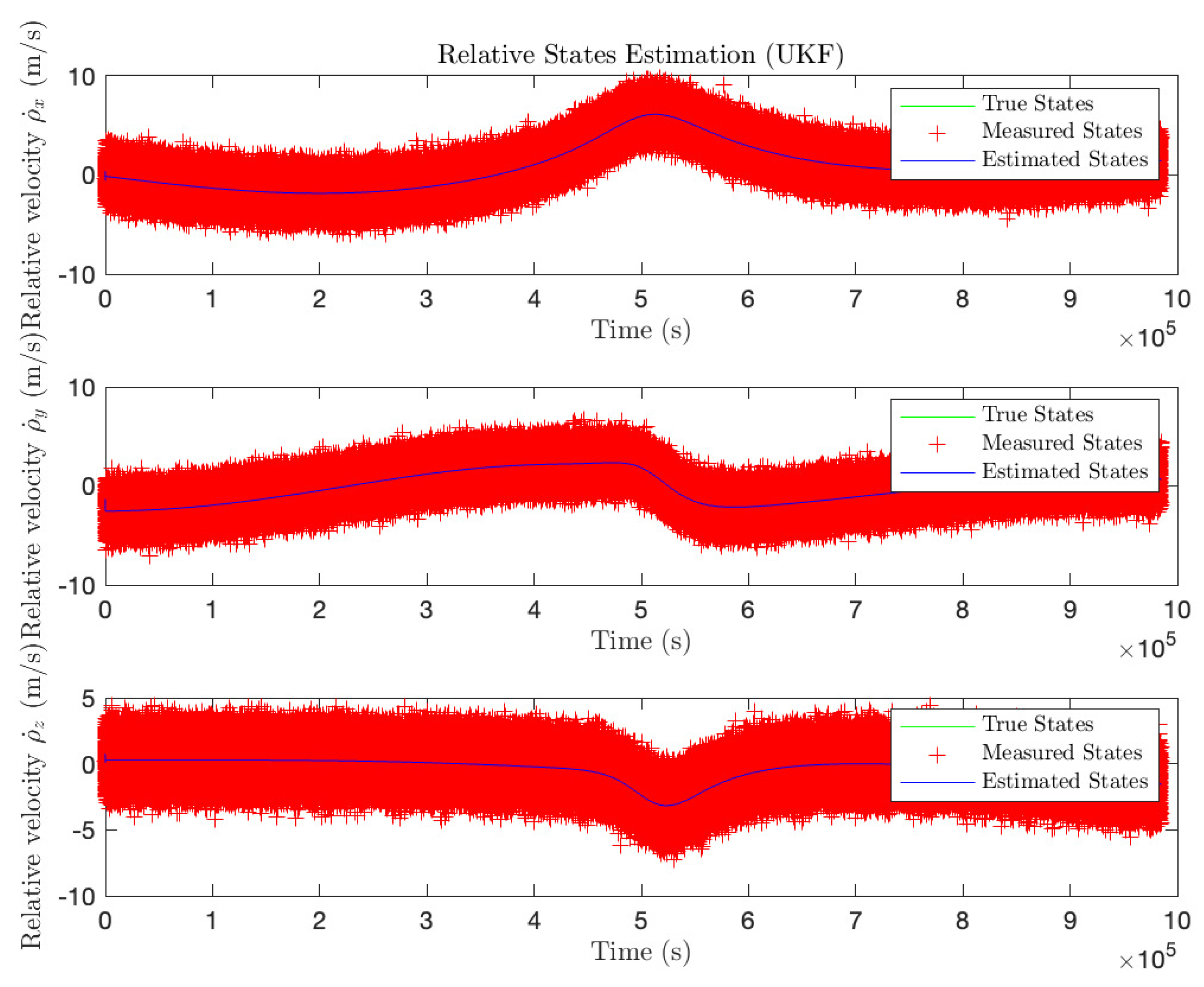
3.1.2. Non-Linear Estimation Results (UKF)
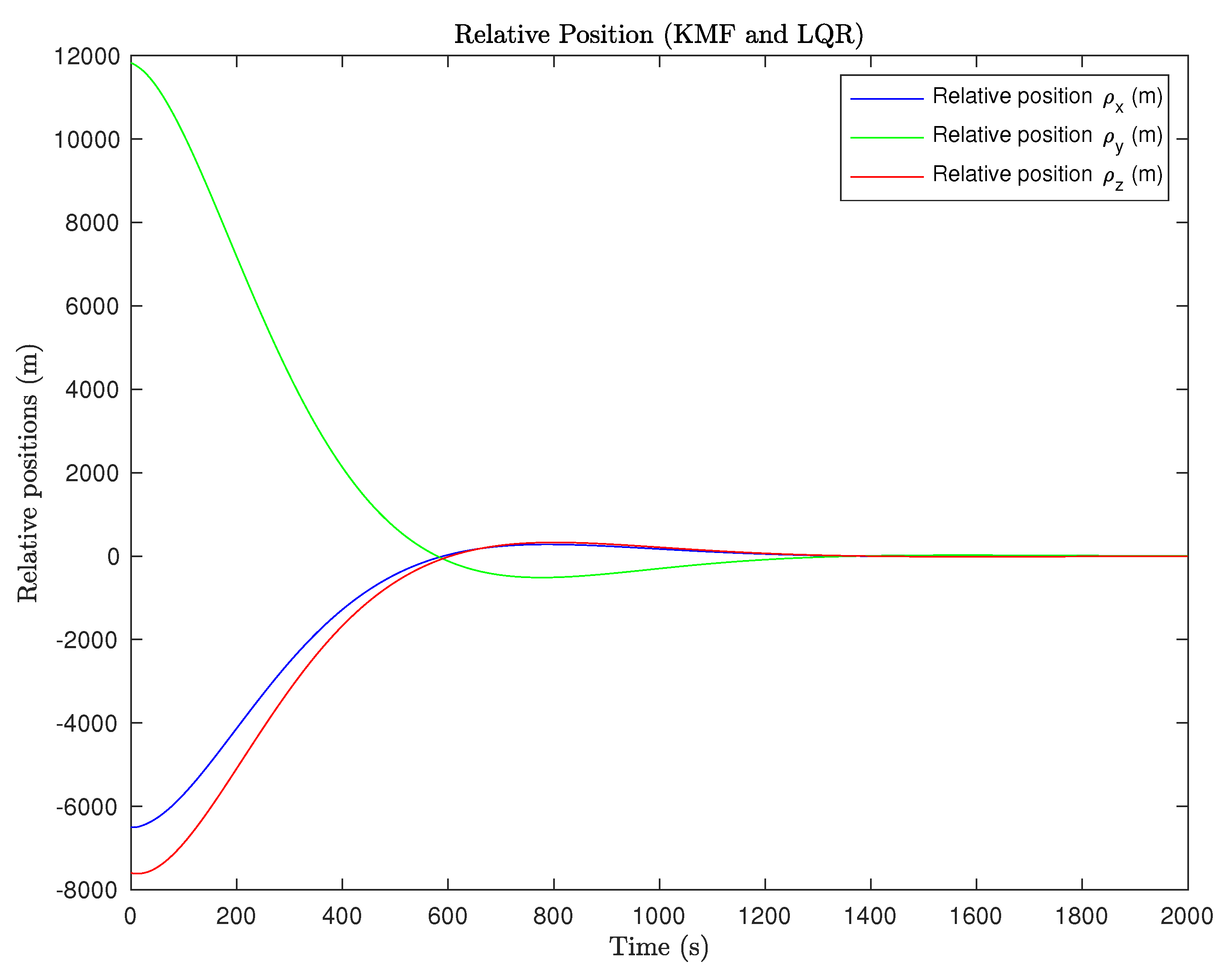
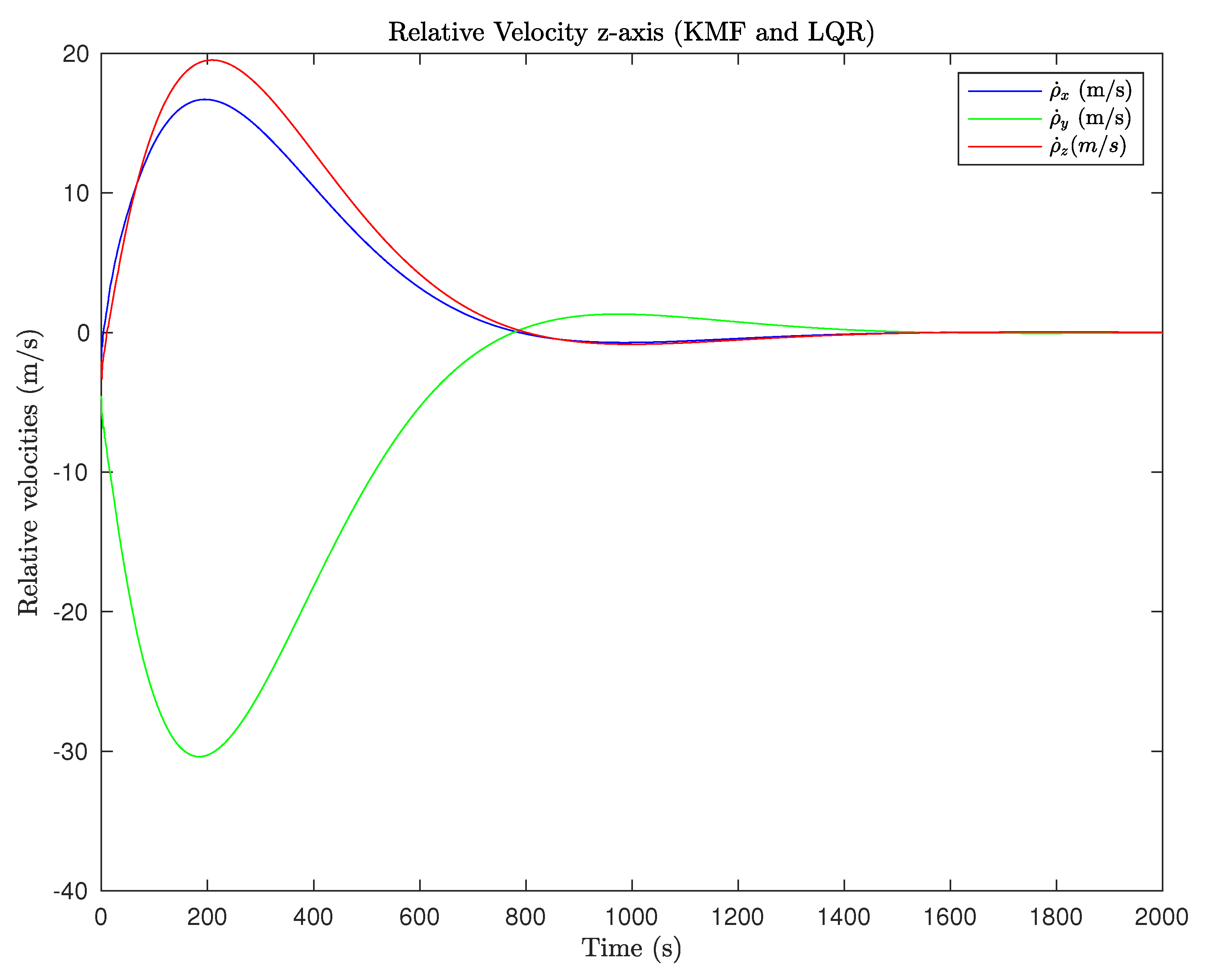
3.2. Rendezvous Scenario with Linear Estimation and LQR Control
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| LEO | Low Earth Orbit |
| GEO | Geostationary Earth Orbit |
| CR3BP | Circular Restricted Three-Body problem |
| ER3BP | Elliptic Restricted Three-Body problem |
| STM | State Transition Matrix |
| LVLH | Local Vertical Local Horizontal |
| KMF | Kalman Filter |
| UKF | Unscented Kalman Filter |
| LQR | Linear Quadratic Regulator |
| n | Moon Mean Motion |
| Euclidean Norm | |
| I | Identity Matrix |
| Nondimensional Quantity | |
| Nondimensional Time Quantity | |
| Skew-symmetric matrix | |
| Vector | |
| R | Norm of Vector |
| Vector expressed in Inertial Frame | |
| Relative State Vector | |
| Angular Velocity | |
| G | Gravitational Constant |
References
- Holzinger, M.; Chow, C.; Garretson, P. A Primer on Cislunar Space; Air Force Research Laboratory: Greene County, OH, USA, 2021. [Google Scholar]
- Clohessy, W.; Wiltshire, R. Terminal guidance system for satellite rendezvous. J. Aerosp. Sci. 1960, 27, 653–658. [Google Scholar] [CrossRef]
- Vepa, R. Application of the nonlinear Tschauner-Hempel equations to satellite relative position estimation and control. J. Navig. 2018, 71, 44–64. [Google Scholar] [CrossRef]
- Winternitz, L.B.; Bamford, W.A.; Long, A.C.; Hassouneh, M. GPS based autonomous navigation study for the lunar gateway. In Proceedings of the Annual American Astronautical Society (AAS) Guidance, Navigation, and Control Conference, number AAS 19-096. Breckenridge, CO, USA, 31 January–6 February 2019. [Google Scholar]
- Zuehlke, D. Autonomous Space Surveillance for Arbitrary Domains. Ph.D. Thesis, Embry-Riddle Aeronautical University, Daytona Beach, FL, USA, 2023. [Google Scholar]
- Szebehely, V.G. Theory of Oribts: The Restricted Problem of Three Bodies; Academic Press: Cambridge, MA, USA; Yale University: New Haven, CT, USA, 1967. [Google Scholar]
- Gordon, S.C. Orbit Determination Error Analysis and Station-Keeping for Libration Point Trajectories. Ph.D. Thesis, Purdue University, Ann Arbor, MI, USA, 1991. [Google Scholar]
- Greaves, J.A.; Scheeres, D.J. Relative Estimation in the Cislunar Regime using Optical Sensors Jesse A. Greaves. In Proceedings of the 22ND Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 14–17 September 2021. [Google Scholar]
- Franzini, G.; Innocenti, M. Relative Motion Dynamics with Arbitrary Perturbations in the Local-Vertical Local-Horizon Reference Frame. J. Astronaut. Sci. 2020, 67, 98–112. [Google Scholar] [CrossRef]
- Galullo, M.; Bucchioni, G.; Franzini, G.; Innocenti, M. Closed Loop Guidance During Close Range Rendezvous in a Three Body Problem. J. Astronaut. Sci. 2022, 69, 28–50. [Google Scholar] [CrossRef]
- Wilson, R.S. A Design Tool for Constructing Multiple Lunar Swingby Trajectories. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 1993. [Google Scholar]
- Gupta, M. Finding Order in Chaos: Resonant Orbits and Poincare Sections. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2020. [Google Scholar]
- Grebow, D.J. Generating Periodic Orbits in the Circular Restricted Three-Body Problem with Applications to Lunar South Pole Coverage. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2006. [Google Scholar]
- Pernicka, H.J. The Numerical Determination of Nominal Libration Point Trajectories and Development of a Station-Keeping Strategy. Ph.D. Thesis, Purdue University, Ann Arbor, MI, USA, 1990. [Google Scholar]
- Gerding, R.B. Rendezvous equations in the vicinity of the second libration point. J. Spacecr. Rockets 1971, 8, 292–294. [Google Scholar] [CrossRef]
- Gurfil, P.; Kasdin, N. Dynamics and control of spacecraft formation flying in three-body trajectories. In AIAA Guidance, Navigation, and Control Conference and Exhibit, Guidance, Proceedings of the Navigation, and Control and Co-Located Conferences, Montreal, QC, Canada, 6–9 August 2001; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2001. [Google Scholar] [CrossRef]
- Marchand, B.G.; Howell, K.C. Control Strategies for Formation Flight In the Vicinity of the Libration Points. J. Guid. Control Dyn. 2005, 28, 1210–1219. [Google Scholar] [CrossRef]
- Mand, K. Rendezvous and Proximity Operations at the Earth-Moon L2 Lagrange Point: Navigation Analysis for Preliminary Thajectory Design. Ph.D. Thesis, Rice University, Houston, TX, USA, 2014. [Google Scholar]
- Franzini, G.; Innocenti, M. Relative motion dynamics in the restricted three-body problem. J. Spacecr. Rocket. 2019, 56, 1322–1337. [Google Scholar] [CrossRef]
- Bucchioni, G.; Innocenti, M. Rendezvous in Cis-Lunar Space near Rectilinear Halo Orbit: Dynamics and Control Issues. Aerospace 2021, 8, 68. [Google Scholar] [CrossRef]
- Howell, K.A.C. Three-Dimensional, Periodic HALO Orbits in the Restricted Three-Body Problem. Ph.D. Thesis, Stanford University, Ann Arbor, MI, USA, 1983. [Google Scholar]
- Zuehlke, D.; Yow, T.; Posada, D.; Nicolich, J.; Hays, C.W.; Malik, A.; Henderson, T. Initial Orbit Determination for the CR3BP using Particle Swarm Optimization. In Proceedings of the 2022 AAS/AIAA Astrodynamics Specialist Conference, AAS/AIAA, Charlotte, NC, USA, 7–11 August 2022. [Google Scholar]
- Zuehlke, D.; Sizemore, A.; Henderson, T. Regions of Application for Linearized Relative Motion in the Restricted Three Body Problem. In Proceedings of the 33rd AAS/AIAA Space Flight Mechanics Meeting, Austin, TX, USA, 15–19 January 2023. [Google Scholar]
- Greaves, J.A.; Scheeres, D.J. Observation and Maneuver Detection for Cislunar Vehicles. J. Astronaut. Sci. 2021, 68, 826–854. [Google Scholar] [CrossRef]
- Miller, L.J. Relative Navigation for Spacecraft in Nearly Rectilinear Halo Orbits. In AIAA SCITECH 2022 Forum; AIAA SciTech Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar]
- Khoury, F. Orbital Rendezvous and Spacecraft Loitering in the Earth-Moon System. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2020. [Google Scholar]
- Franzini, G.; Innocenti, M. Relative motion equations in the local-vertical local-horizon frame for rendezvous in lunar orbits. In Proceedings of the 2017 AAS/AIAA Astrodynamics Specialist Conference, Stevenson, WA, USA, 20–24 August 2017. [Google Scholar]
- Khoury, F.; Howell, K.C. Orbital rendezvous and spacecraft loitering in the earth-moon system. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Lake Tahoe, CA, USA, 9–13 August 2020. [Google Scholar]
- Innocenti, M.; Bucchioni, G.; Franzini, G.; Galullo, M.; Onofrio, F.D.; Cropp, A.; Casasco, M. Dynamics and control analysis during rendezvous in non-Keplerian Earth—Moon orbits. Front. Space Technol. 2022, 3, 22. [Google Scholar] [CrossRef]
- Christian, J.A.; Lightsey, E.G. Review of Options for Autonomous Cislunar Navigation. J. Spacecr. Rockets 2009, 46, 1023–1036. [Google Scholar] [CrossRef]
- Colagrossi, A.; Pesce, V.; Bucci, L.; Colombi, F.; Lavagna, M. Guidance, navigation and control for 6DOF rendezvous in Cislunar multi-body environment. Aerosp. Sci. Technol. 2021, 114, 106751. [Google Scholar] [CrossRef]
- Ceresoli, M.; Zanotti, G.; Lavagna, M. Bearing-Only Navigation for Proximity Operations on Cislunar Non-Keplerian Orbits. In Proceedings of the 72nd International Astronautical Congress, Dubai, United Arab Emirates, 25–29 October 2021. [Google Scholar]
- Davis, D.C.; Bhatt, S.; Howell, K.; Jang, J.W.; Whitley, R.; Clark, F.; Guzzetti, D.; Zimovan, E.M.; Barton, G. Orbit Maintenance and Navigation of Human Spacecraft at Cislunar Near Rectilinear Halo Orbits. In Proceedings of the AAS/AIAA Space Flight Mechanics Meeting, San Antonio, TX, USA, 5–9 February 2017. [Google Scholar]
- Capannolo, A.; Lavagna, M. Adaptive State-Dependent Riccati Equation Control for Formation Reconfiguration in Cislunar Space. J. Guid. Control Dyn. 2022, 45, 982–989. [Google Scholar] [CrossRef]
- Nazari, M.; Anthony, W.; Butcher, E.A. Continuous Thrust Stationkeeping in Earth-Moon L1 Halo Orbits Based on LQR control and Floquet Theory. In Proceedings of the 24th AAS/AIAA Space Flight Mechanics Meeting, San Diego, CA, USA, 4–7 August 2014. [Google Scholar] [CrossRef]
- Zuehlke, D.; Sizemore, A.; Henderson, T. Periodic Relative Natural Motion in the Circular Restricted Three-Body Problem. In Proceedings of the 33rd AAS/AIAA Space Flight Mechanics Meeting, Austin, TX, USA, 15–19 January 2023. [Google Scholar]
- Zuehlke, D.; Sizemore, A.; Henderson, T.; Langford, A. Relative Motion Models for the Elliptical Restricted Three Body Problem. In Proceedings of the 2022 AAS/AIAA Astrodynamics Specialist Conference, Charlotte, NC, USA, 7–11 August 2022. [Google Scholar]
- Vallado, D.A.; McClain, W.D. Fundamentals of Astrodynamics and Applications; Microcosm Press: Cleveland, OH, USA, 2013. [Google Scholar]
- Brogan, W.L. Modern Control Theory; Prentice Hall: Kent, OH, USA, 1991. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter. 1995. Available online: https://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf (accessed on 1 July 2023).
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 21–24 April 1997; Volume 3068, pp. 182–193. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Dilshad Raihan, A.V.; Chakravorty, S. A UKF-PF based Hybrid Estimation Scheme for Space Object Tracking. arXiv 2014, arXiv:1409.7723. [Google Scholar]
- Hou, L.; Zou, H.; Zheng, K.; Zhang, L.; Zhou, N.; Ren, J.; Shi, D. Orbit estimation for spacecraft based on intermittent measurements: An event-triggered UKF approach. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 304–317. [Google Scholar] [CrossRef]
- Tonc, L.; Richards, G. Orbit Estimation from Angles-Only Observations Using Nonlinear Filtering Schemes. Utah Space Grant Consortium. 2019. Available online: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1569&context=spacegrant (accessed on 1 July 2023).
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the 1995 American Control Conference—ACC’95, Seattle, WA, USA, 21–23 June 1995; Volume 3, pp. 1628–1632. [Google Scholar]
- Stengel, R.F. Optimal Control and Estimation; Dover Publications: Mineola, NY, USA, 1994. [Google Scholar]
- Donatini, T.; D’onofrio, F.; Bucchioni, G.; Innocenti, M. Aas 22-506 Earth to Moon l2 nrho Transfers Using a Cycler Approach in the Restricted Three Body Problem. 2022. Available online: https://s3.amazonaws.com/amz.xcdsystem.com/A464D031-C624-C138-7D0E208E29BC4EDD_abstract_File22414/FinalPaperPDF_6_0830054245.pdf (accessed on 30 August 2022).
- May, Z.D.; Qu, M.; Merrill, R. Enabling Global Lunar Access for Human Landing Systems Staged at Earth-Moon L2 Southern Near Rectilinear Halo and Butterfly Orbits. In AIAA Scitech 2020 Forum; AIAA SciTech Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2020. [Google Scholar] [CrossRef]
- Ryan Park, A.B.C. Solar System Dynamics: Three-Body Periodic Orbits. 2023. Available online: https://ssd.jpl.nasa.gov/tools/periodic_orbits.html#/periodic (accessed on 25 November 2022).
- Moler, C.; Van Loan, C. Nineteen Dubious Ways to Compute the Exponential of a Matrix. SIAM Rev. 1978, 20, 801–836. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuehlke, D.; Tiwari, M.; Jebari, K.; Kidambi, K.B. Rendezvous and Proximity Operations in Cislunar Space Using Linearized Dynamics for Estimation. Aerospace 2023, 10, 674. https://doi.org/10.3390/aerospace10080674
Zuehlke D, Tiwari M, Jebari K, Kidambi KB. Rendezvous and Proximity Operations in Cislunar Space Using Linearized Dynamics for Estimation. Aerospace. 2023; 10(8):674. https://doi.org/10.3390/aerospace10080674
Chicago/Turabian StyleZuehlke, David, Madhur Tiwari, Khalid Jebari, and Krishna Bhavithavya Kidambi. 2023. "Rendezvous and Proximity Operations in Cislunar Space Using Linearized Dynamics for Estimation" Aerospace 10, no. 8: 674. https://doi.org/10.3390/aerospace10080674
APA StyleZuehlke, D., Tiwari, M., Jebari, K., & Kidambi, K. B. (2023). Rendezvous and Proximity Operations in Cislunar Space Using Linearized Dynamics for Estimation. Aerospace, 10(8), 674. https://doi.org/10.3390/aerospace10080674