1. Introduction
Unmanned aerial vehicles (UAVs) have shown great potential in both civilian and military applications, such as surveillance [
1], search and rescue [
2], reconnaissance [
3] and traffic management [
4]. A key enabler of these applications is target tracking, i.e., extracting the target information from the sensor measurements. As target tracking is an information gathering process, it can greatly benefit from multi-UAV systems, in terms of accuracy, effectiveness and also reliability [
5]. However, UAV swarms are typically equipped with passive onboard sensors—e.g., optical and infrared cameras—due to their low cost and energy efficiency. These image sensors can only provide bearing information on the targets, and their fields of view (FOVs) are extremely limited, which makes it difficult to employ them in multi-target tracking scenarios. In multi-target tracking, the number of targets is usually both unknown and time-varying [
6,
7]: thus, the UAVs are required to search the entire area for undiscovered targets. On the other hand, as the image sensors cannot provide relative range information, target tracking using these sensors often suffers from observability problems [
8,
9,
10]. Therefore, trajectory optimization is required for the UAVs, to improve the overall tracking performance in multi-sensor multi-target tracking applications.
Trajectory optimization for jointly searching for undiscovered targets and for maintaining the tracking accuracy of discovered targets is a challenging problem, as search and tracking are competitive goals and sensor resources are limited. In recent years, the problem of multi-target search and tracking based on sensor trajectory optimization has attracted the interest of researchers. The authors in [
11] estimated the appearing probability of undetected targets, using the occupation grid filter. Based on the assumption that the data association between the measurements and target is known a priori, they predicted the mutual entropy between the future measurements and the grid occupation probability and also the target states. They took the weighted sum of these as the objective function, and they constructed the planning problem for multi-target search and tracking with range sensors. In [
12], a Voronoi-based control method was combined with the distributed form of the probability hypothesis density (PHD) filter, to develop a distributed sensor management method of searching and tracking for an unknown number of targets. By utilizing the Poisson multi-Bernoulli mixture (PMBM) filter, the intensity of undetected targets was modeled and iterated according to the UAV trajectories, and a single-sensor management approach was proposed, based on the Monte Carlo Tree Search (MCTS) method in [
13]. The algorithm was verified under the conditions of both static and mobile sensors. To avoid the problem of high computational complexity caused by the increase of the number of Gaussian components, the authors replaced the Gaussian-mixture target birth model in [
13] with uniform distribution at the edge of the monitoring region, and they approximated the predicted target intensity using the Rao-Blackwellized point mass filter (RB-PMF) in [
14]. In [
15], mutual entropy in information theory was used to define the value function of target tracking, and the search area was divided into grids. The probability of unknown targets in each grid was modeled as a Bernoulli variable, and the change of Shannon entropy before and after the update process was leveraged as the value function of the searching objective. According to the global criterion method (GCM), a multi-objective optimization objective function was constructed, and the planning problem for multi-target search and tracking was solved by enumeration. However, the above works assumed that the target positions could be directly obtained from the sensors or that the range between the UAV and the target was accessible.
In this paper, a new trajectory optimization method for multi-sensor multi-target search and tracking with passive onboard sensors is proposed. The contributions of this paper are twofold. The original JIPDA filter is modified to facilitate the multi-target search objective. To the best of the authors’ knowledge, the multi-target search and tracking problem has rarely been studied utilizing the JPDA-based filter. On the other hand, the dimensionless objective functions for search and tracking, respectively, are derived, and their weighted sum is used as the overall objective function, which makes it convenient to adjust the weights of the two goals.
On the basis of the JIPDA filter, the intensity of unknown targets is considered and modeled, in the calculation of association probability. This is utilized as a metric to guide the UAV towards areas with a high probability of potential targets, to achieve the target searching goal. To facilitate the combination between the objective functions of searching and tracking, dimensionless metrics for these two objectives, respectively, are formulated, and their weighted sum is leveraged as the objective function for trajectory optimization. Typical scenarios were simulated, to evaluate the proposed approach, and the results reveal that the proposed method can well balance the search and tracking objectives and maintain acceptable multi-target tracking accuracy.
The rest of this paper is organized as follows. In
Section 2, some system models are introduced, and the multi-sensor multi-target search and tracking problem is formulated.
Section 3 provides the necessary preliminaries of the multi-target tracking filter and track-to-track fusion methods. The objective functions of multi-target search and tracking are derived first, and the multi-UAV trajectory optimization problem is then constructed in
Section 4. The simulation results are presented in
Section 5, and our conclusions are offered in
Section 6.
5. Simulation
For this section, the proposed multi-UAV multi-target search and tracking trajectory optimization algorithm was verified by numerical simulation. Firstly, the performance evaluation indexes commonly used in multi-target tracking were introduced, and the accuracy of cardinal number estimation and position estimation was comprehensively evaluated. Then, the effectiveness of the proposed algorithm was tested in several target search and tracking scenarios. All the simulations were conducted in MATLAB R2020a, and the genetic algorithm (GA) toolbox was leveraged, to solve the optimization problem.
5.1. Performance Evaluation
The widely used optimal subpattern assignment metric (OSPA) [
25] describes the distance between two multi-target sets, and was employed here to evaluate the tracking performance. We let
and
denote the ground truth set and the estimated target set, respectively; the OSPA distance between them was defined by
where
was the set of permutations of
, and where
denoted the index of element in set
that was assigned to the
ith element in set
X. The cutoff distance between vectors
and
was
, with
being the Euclidean norm. The order parameter
p determined the sensitivity of the OSPA on the wrong estimates, while the cutoff parameter
c determined the relative weighting of the cardinality estimation error against the localization error.
5.2. Simulation Setup
We considered a scenario of four UAVs searching and tracking multiple targets with bearing-only sensors in a region of interest. The size of the region was , and the number of divided grids, when calculating the density of the unknown targets, was . The FOV of each UAV was a circular area with radius . The detection probability of the onboard sensor for the targets in its FOV was set to be . The standard deviation of bearing measurement noise was , and the expected number of false alarms in the sensor measurements per frame was . The target survival probability was . The maximum permissible turning rate of the UAV was set to be , and its speed was .
Remark 7. The parameters of the UAV kinematic model were set to simulate small-scale quadrotors, and the value of the maximum turn rate and speed were determined by referring to [8,13]. The target survival probability, intensity of clutter and the detection probability of the onboard sensors were set as the typical values in multi-target tracking scenarios [26]. The constant velocity (CV) model was utilized to describe the kinematics of the targets, and the state transition process of the CV was determined by
with
where
denoted the sampling time. The covariance matrix of the process noise
was given as
where
was the standard deviation of the process noise, and
denoted the
identity matrix.
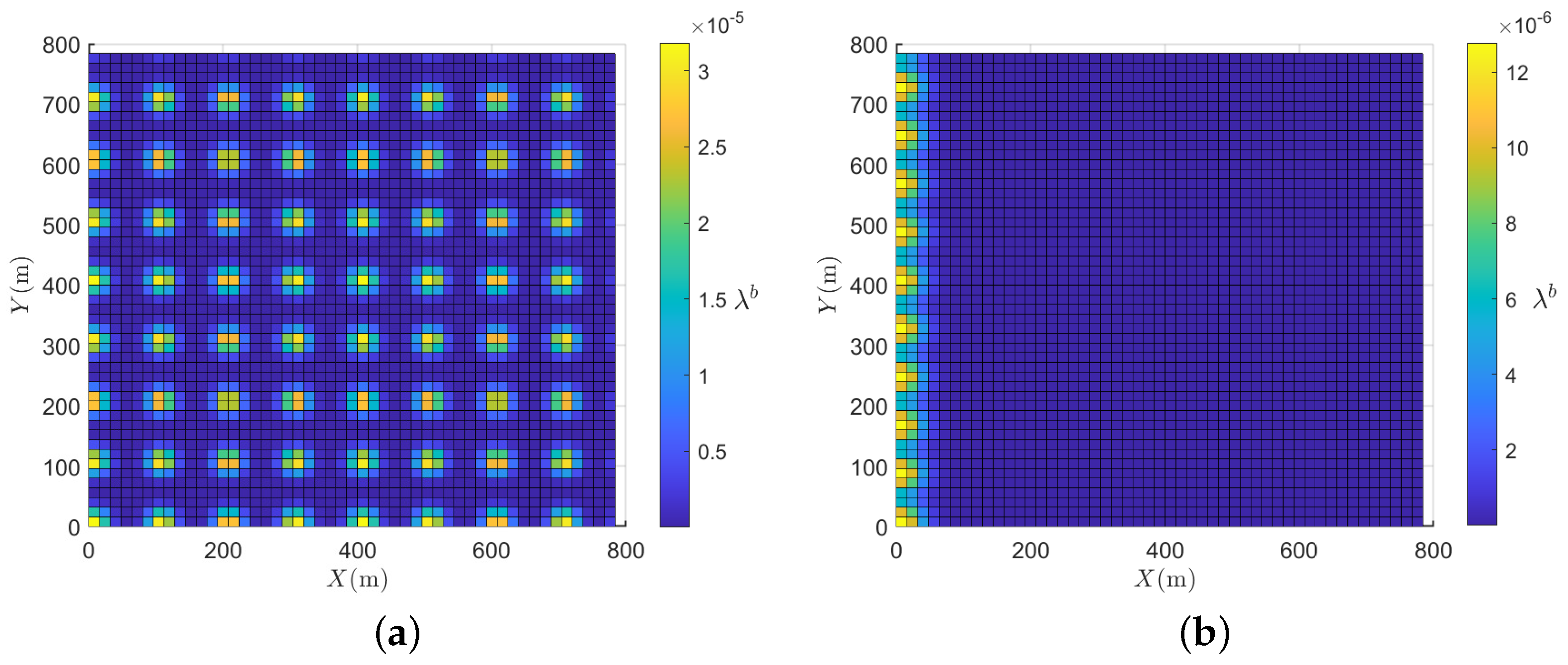
As the prior information of the target position could not be obtained in general, it was assumed that the possible birth positions of the targets were evenly distributed throughout the whole search area. As shown in
Figure 3a, the Poisson birth intensity was described by a Gaussian mixture
, with
. We assumed that a new target appeared every five frames; therefore, the weights of the Gaussian components were determined by
. The mean of the Gaussian components was
, where
. The covariance matrix of the birth intensity was
. The initial value of the unknown target intensity was set to be the same as
. The weight in the objective function was set to be
.
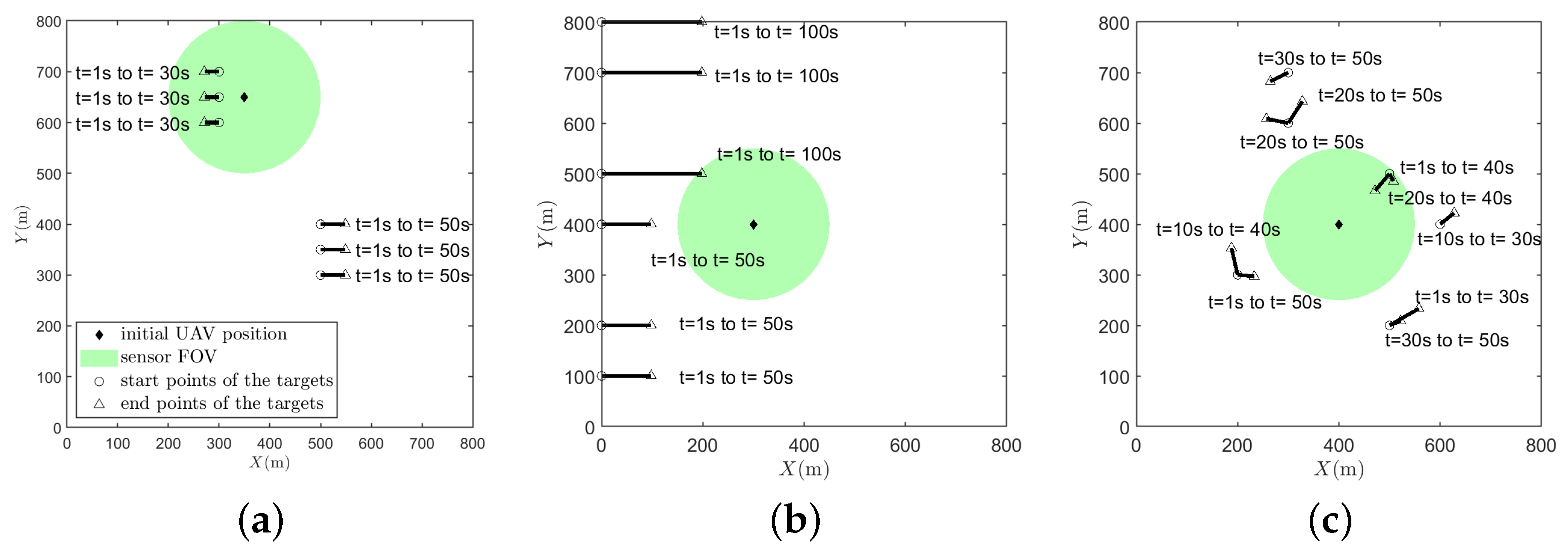
To verify the performance of the proposed UAV trajectory optimization algorithm in target search and tracking applications, three simulation scenarios were set, as shown in
Figure 4. In the figures, the black diamonds were the initial positions of the four UAVs, and the green circular area represented the FOVs of the sensors. The black solid lines were the trajectories of the targets without considering the process noise. The hollow circles stood for the starting position of the tracks, while the hollow triangles stood for the termination positions. The time labels in the figures demonstrated the appearing and disappearing time instants of the corresponding target in the search area. The three simulation scenarios are described in detail as follows:
Scenario 1: Opposite-moving. As shown in
Figure 4a, the initial position of the UAVs is
, and there are two groups of targets moving in opposite directions from the initial moment, one of which is within the FOVs of the sensors. The setting of this scenario aimed to investigate whether the proposed trajectory optimization method can explore and find potential targets successfully, while maintaining the tracking accuracy of the discovered targets.
Scenario 2: Prior-information. This scenario considers special scenarios with prior information about the target birth, such as a scenario where ground vehicles cannot cross obstacles and where the range of entrance is limited. As shown in
Figure 3b, assuming that the targets can only enter the area through the left edge of the area, the parameters in the birth intensity model
are given by
, and the Gaussian components distribute evenly on the left edge. The mean value of the position components is
. The scenario is shown in
Figure 4b. Six targets enter the search area from the left edge at the initial instant, and the initial position of the UAVs is
. The setting of this scenario aims to examine whether the proposed trajectory optimization algorithm can keep track of the discovered target while searching a region with high unknown target density.
Scenario 3: Random-appearing. As shown in
Figure 4c, there are four UAVs searching and tracking for 10 targets, with no prior information of target birth. The 10 targets appear in the search area randomly, and the initial position of the UAVs is
. The setting of this scenario is intended to comprehensively test the ability of the trajectory optimization algorithm to search and track multiple targets.
5.3. Simulation Results
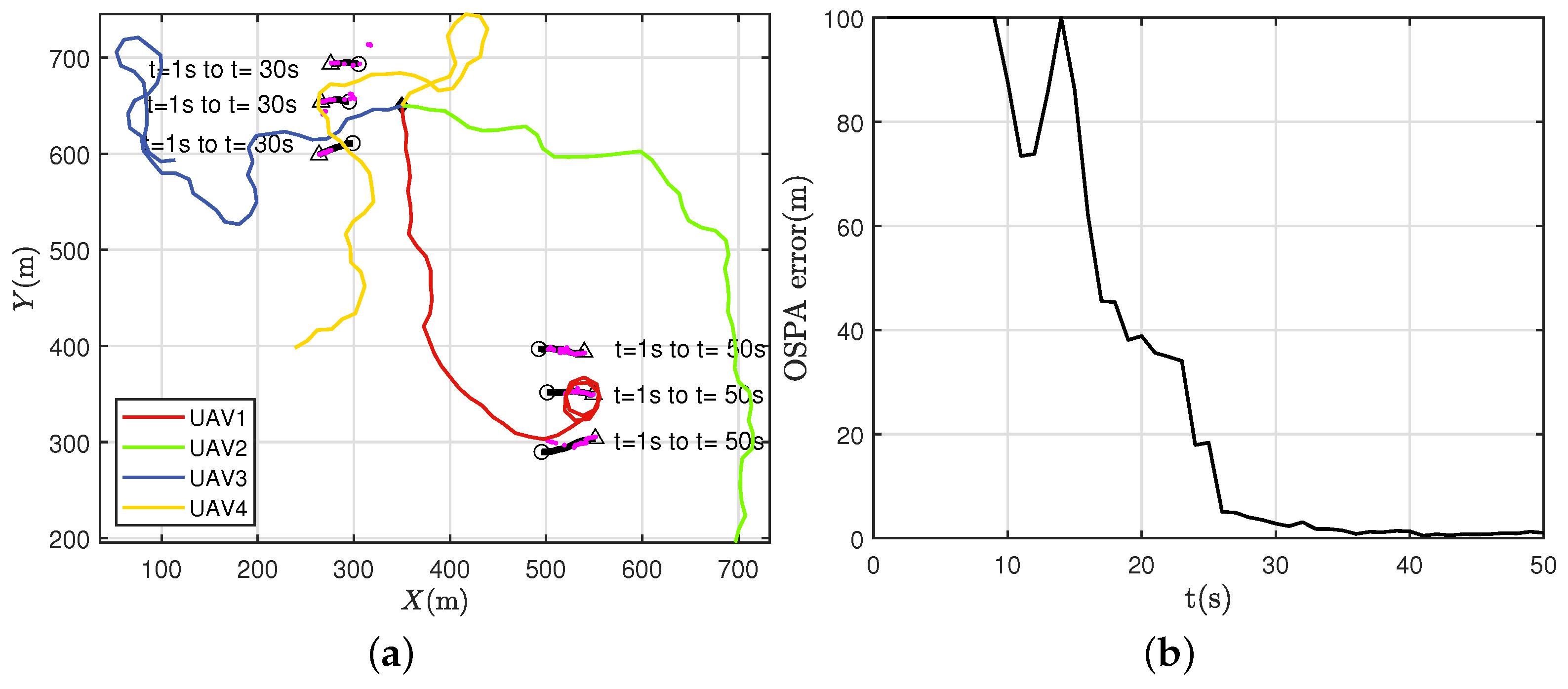
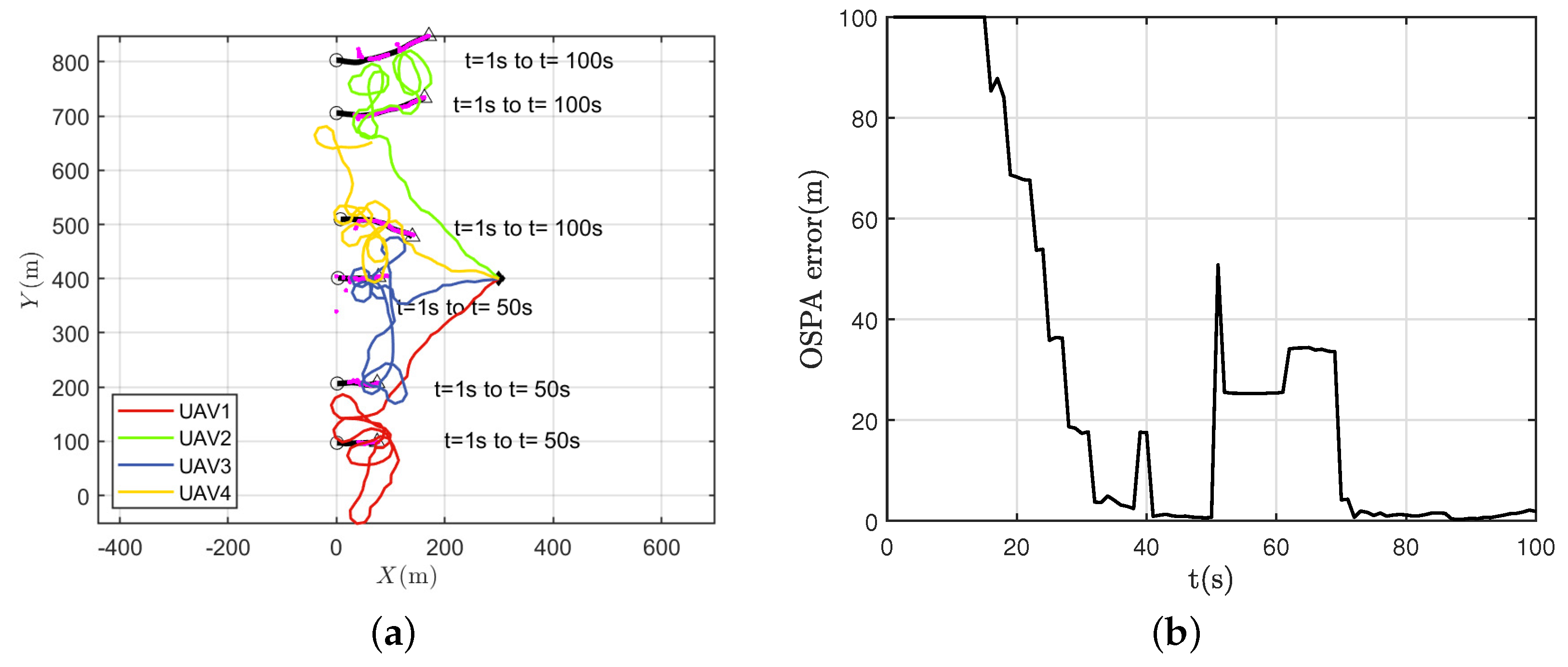
The simulation results of Scenario 1 are shown in
Figure 5.
Figure 5a presents the trajectories optimization results of the four UAVs, where the purple scattering points are the target positions estimated by the multi-sensor multi-target tracking algorithm.
Figure 5b presents the OSPA error of the multi-target positions. It can be seen from the figure that although initially there was one group of targets covered by the sensor FOV, two UAVs, with trajectories in red and green, moved towards the bottom right of the search area, to balance the search and tracking objectives. Then, the UAV with the red trajectory discovered the second group of targets, from
to
, and kept track of them. The UAV with the green trajectory continued to search for the potential targets in the unexplored area, and the second group of targets never appeared in its FOV. When
, the three targets in the upper-left corner disappeared, and the UAVs with the blue and yellow trajectories started to explore other regions. From the simulation results of Scenario 1, it can be seen that the proposed trajectory optimization algorithm can well balance the two purposes of target search and tracking.
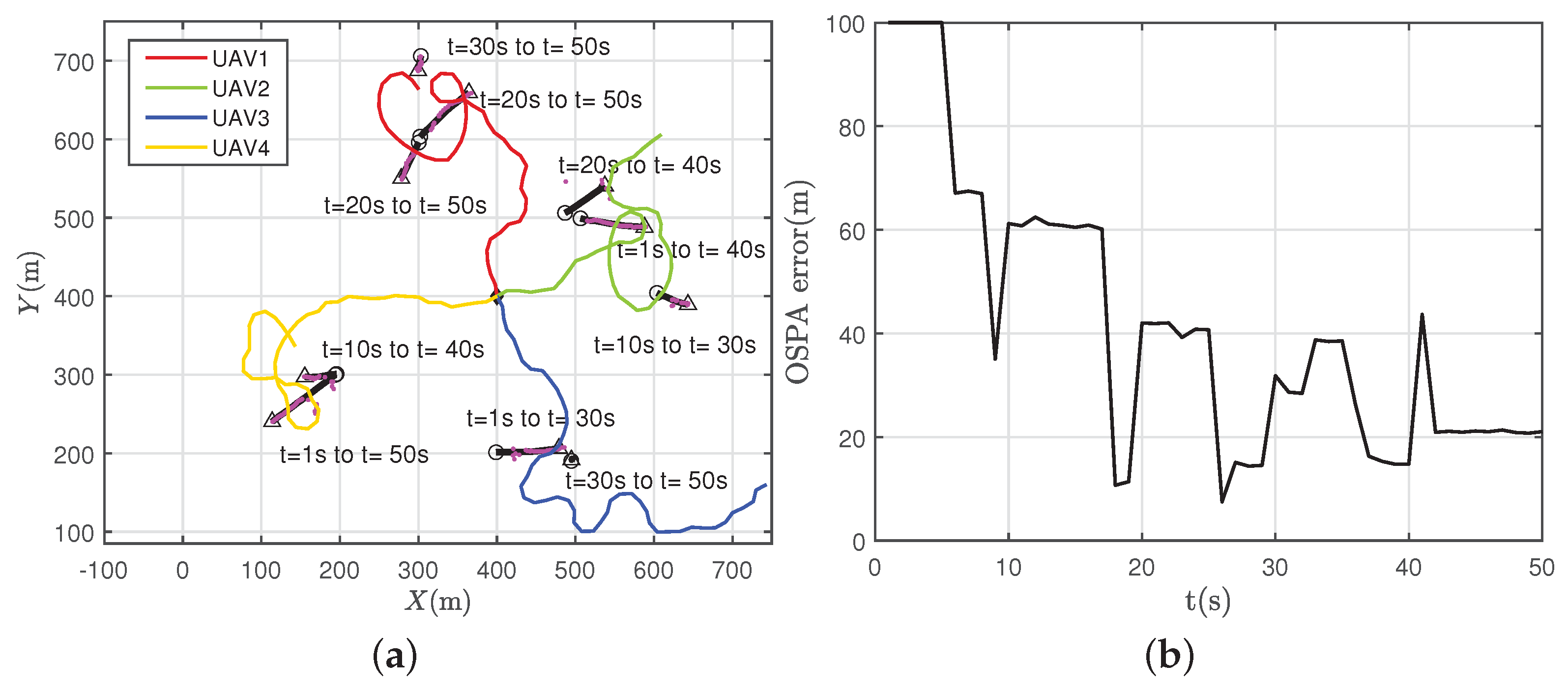
Figure 6 shows the simulation results of Scenario 2. As there was no target in the sensor FOV of the four UAVs, they moved towards the left, where the intensity of unknown targets was high for searching purposes. From
Figure 6b, it can be seen that the six targets from the left edge were confirmed by the UAVs successively between
and
, and that the OSPA error remained below
. When
, the three targets in the lower half of the region disappeared. As the termination of targets needed to be confirmed, based on a series of subsequent measurements, the OSPA error corresponding to this time increased. When
, in order to reduce the intensity of unknown targets in the longitudinal range of
to
, the UAV with the green trajectory began to move downwards, which resulted in the loss of the uppermost target. Five seconds later, the FOV of the UAV with the yellow trajectory covered this area, and the green one returned to the top area and kept track of the two targets. The results revealed that the trajectory optimization algorithm can track the discovered targets while monitoring the regions with high unknown target intensity by coordinating the UAV team, ensuring that the overall tracking error is within an acceptable range.
The simulation results of Scenario 3 are presented in
Figure 7. It can be seen from
Figure 7a that the target at
was located within the detection range of the four UAVs. To balance the performance of search and tracking, the two UAVs with the red and green trajectories moved towards this target, to reduce the tracking error. The other two UAVs flew towards the rest part of the field, to search for more potential targets. The UAV with the trajectory in red detected the target at
while tracking the first target discovered, and it moved to the newly discovered one, while the second UAV kept track of the first target. The UAV with the yellow trajectory successively initiated the two targets at
, and it maintained high tracking accuracy. Note that the UAV with the blue trajectory failed to initiate the target appearing at
, as it was close to another target terminating at
, which is an inherent flaw of the JPDA-based multi-target tracking approaches.
Figure 7b shows the OSPA error of the multi-target positions. It can be seen that the OSPA error converged well and that the sharp increases corresponded to the time of target birth or termination. This is because the initiation of new targets and the confirmation target disappearance need to be determined by multi-frame sensor measurements.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






