
Numerical Simulations in Ultrasonic Guided Wave Analysis for the Design of SHM Systems—Benchmark Study Based on the Open Guided Waves Online Platform Dataset


Abstract
1. Introduction
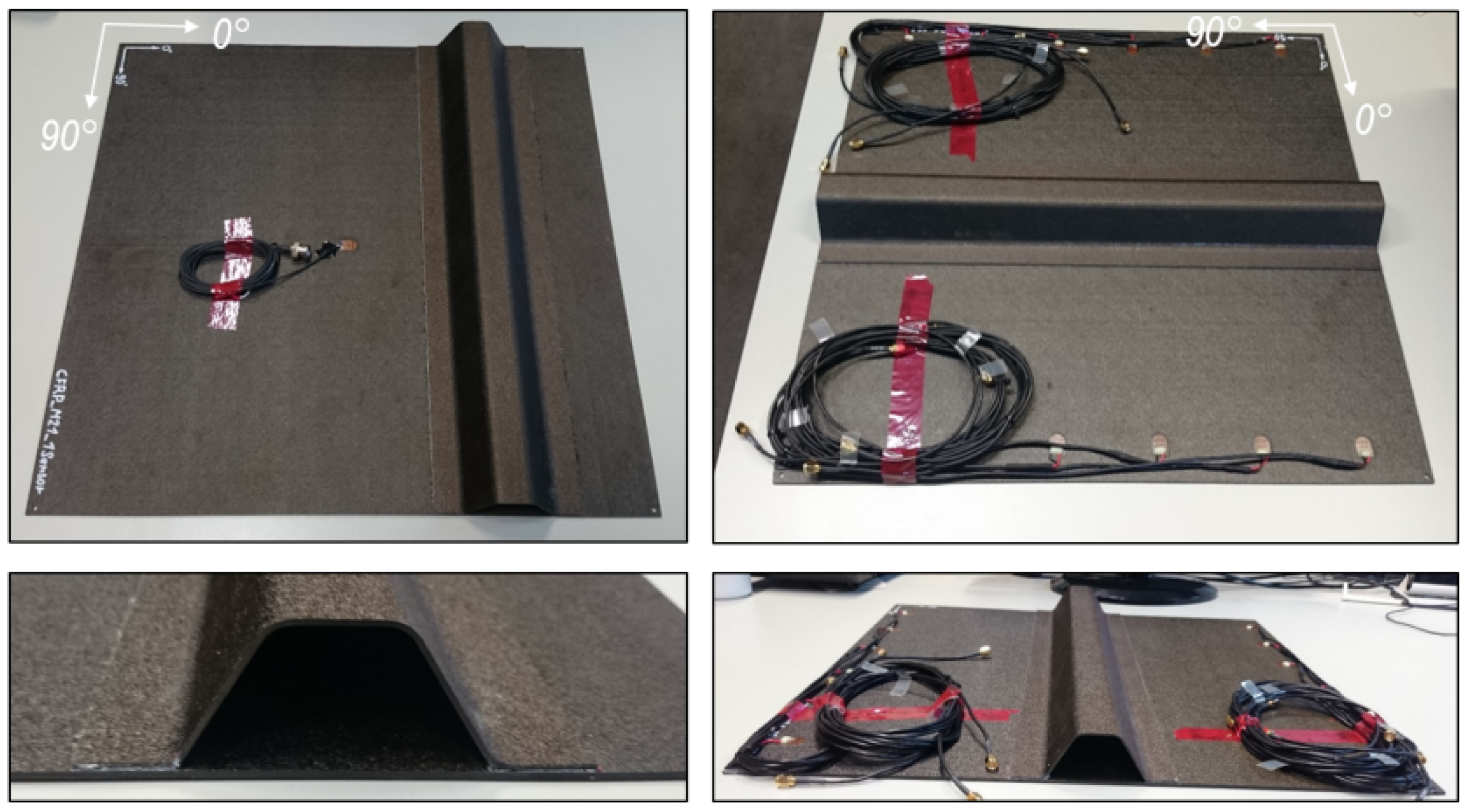
2. Experimental Setup-Open Guided Waves
3. Numerical Modeling of Ultrasonic Guided Wave Propagation
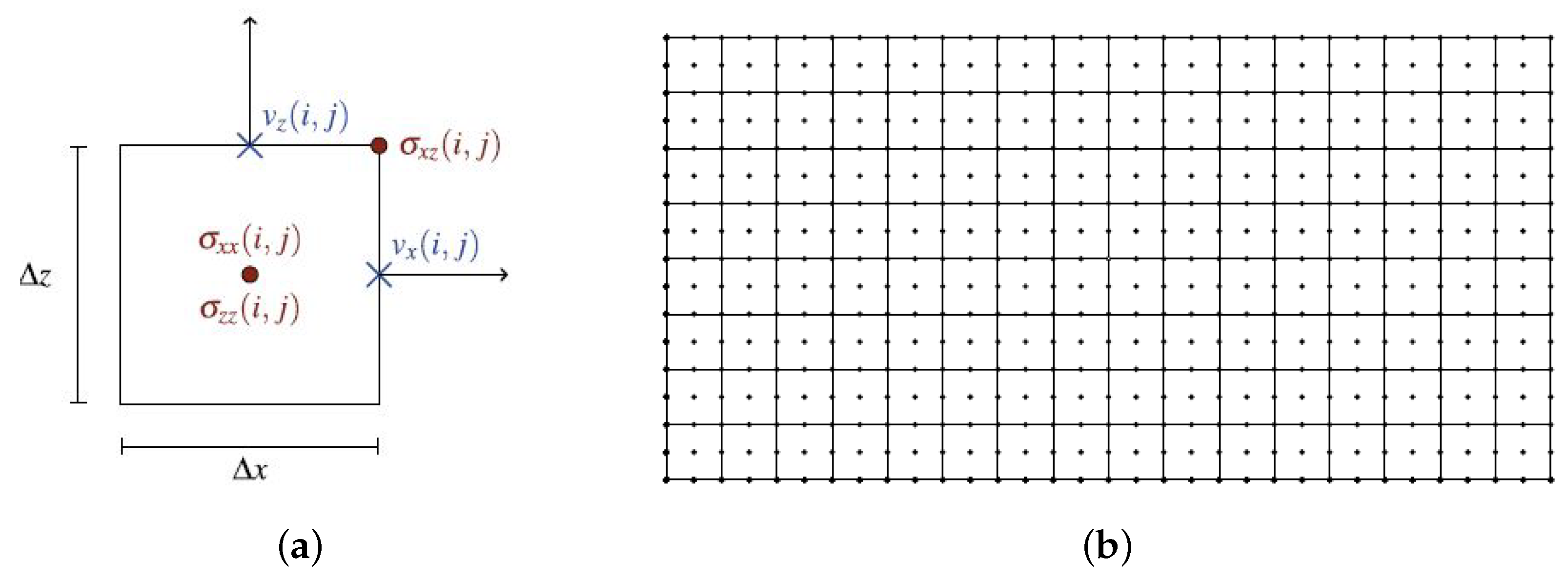
3.1. Analysis by Elasto-Dynamic Finite Integration Technique
3.1.1. Material Modeling
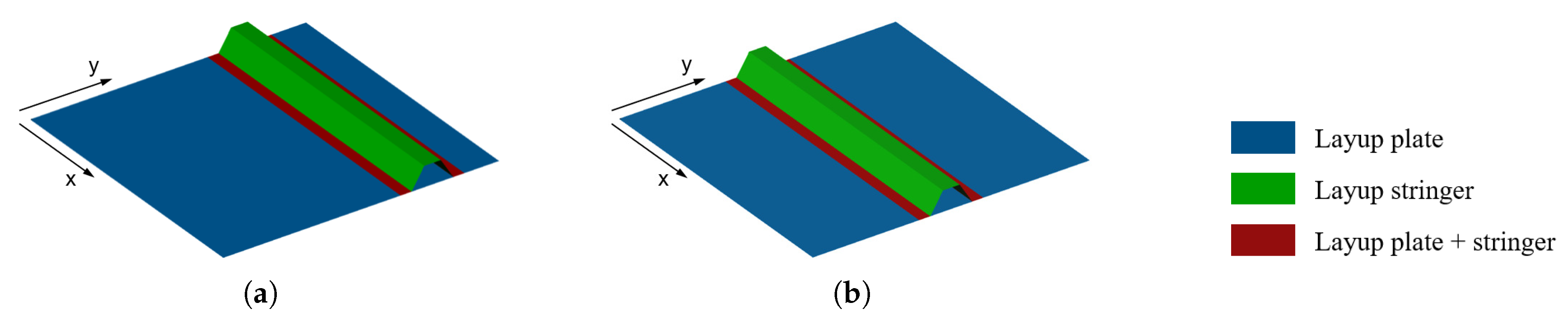
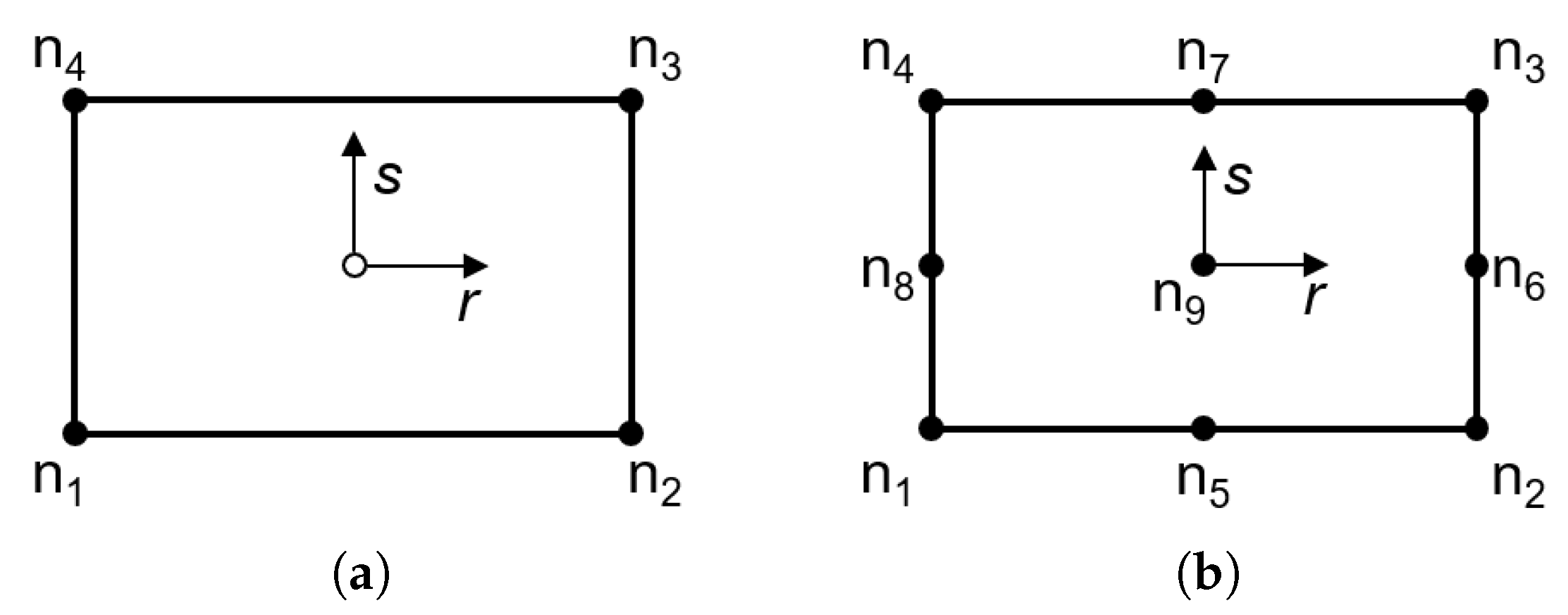
3.2. Analysis by Using Finite Shell Elements
4. Results
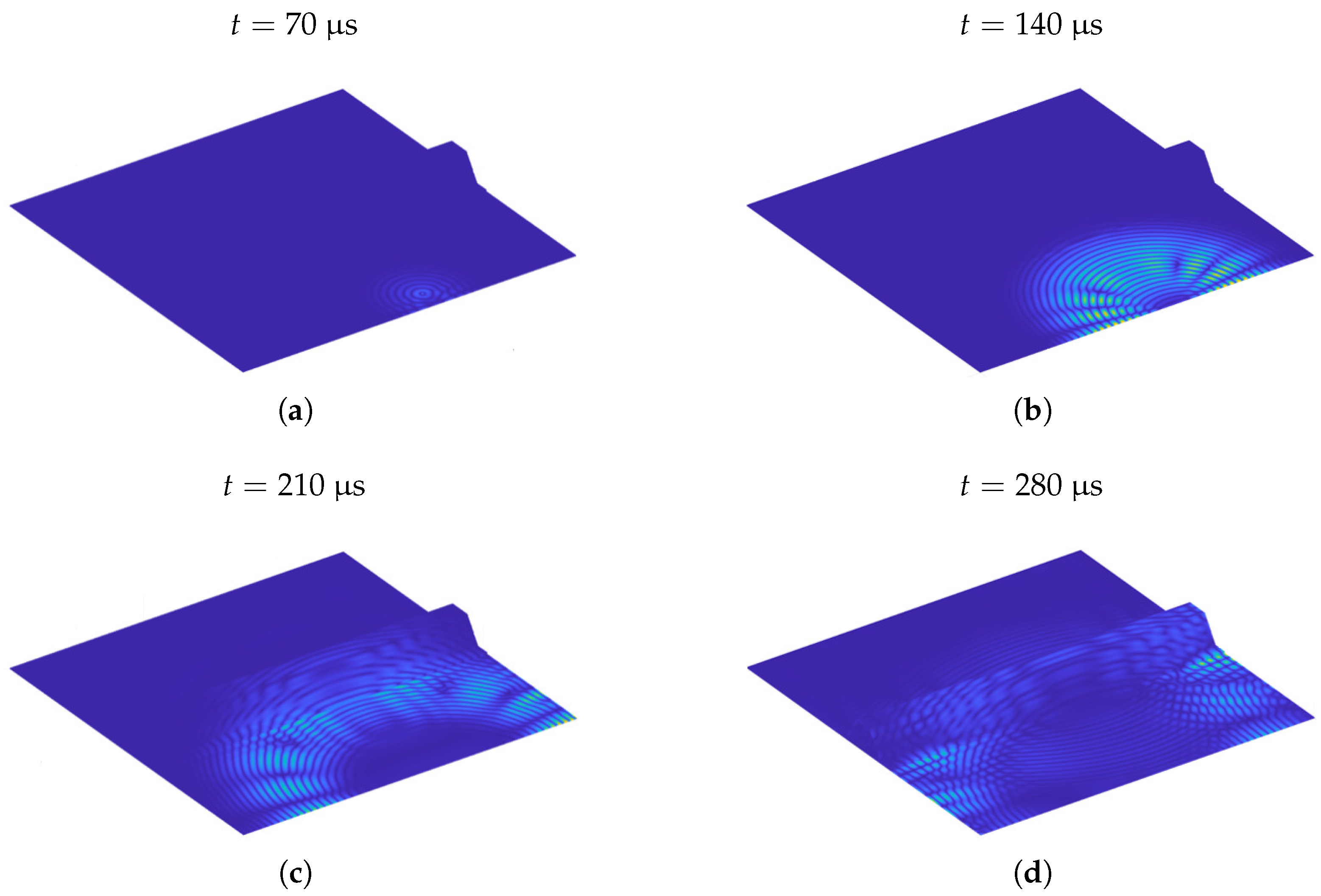
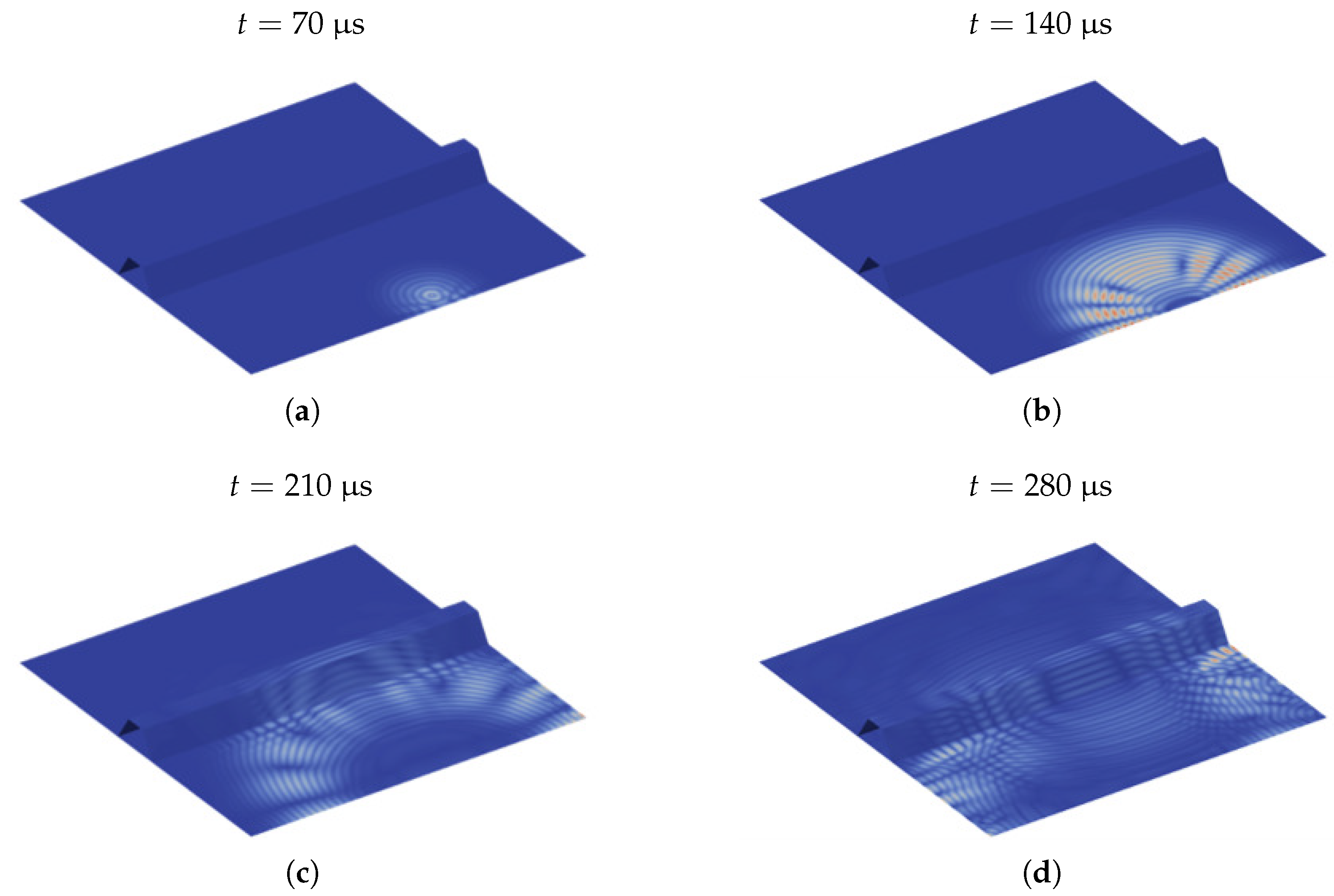
4.1. Simulated Wave Propagation Fields
4.2. Simulated Time-of-Flight Characteristics
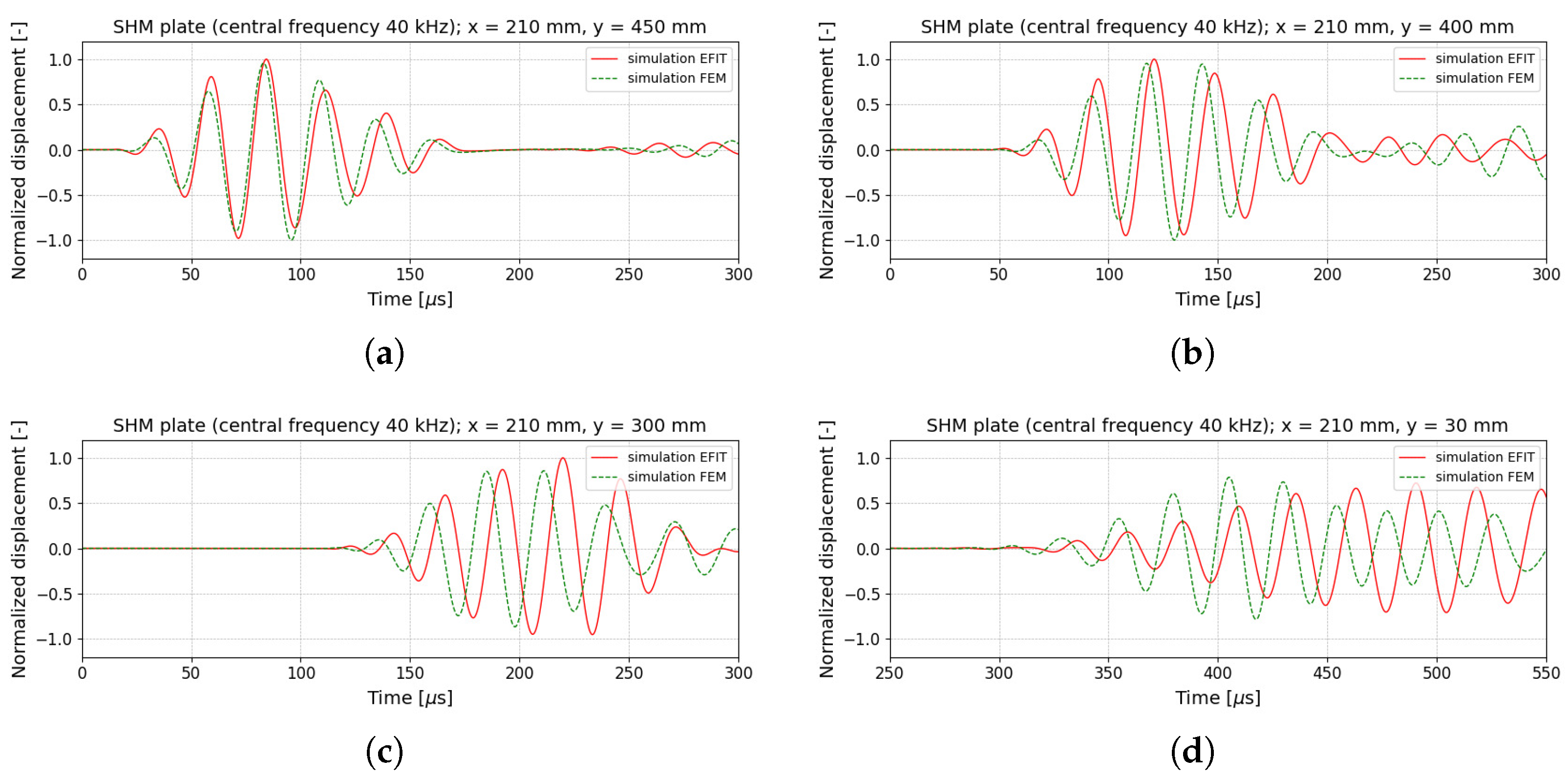
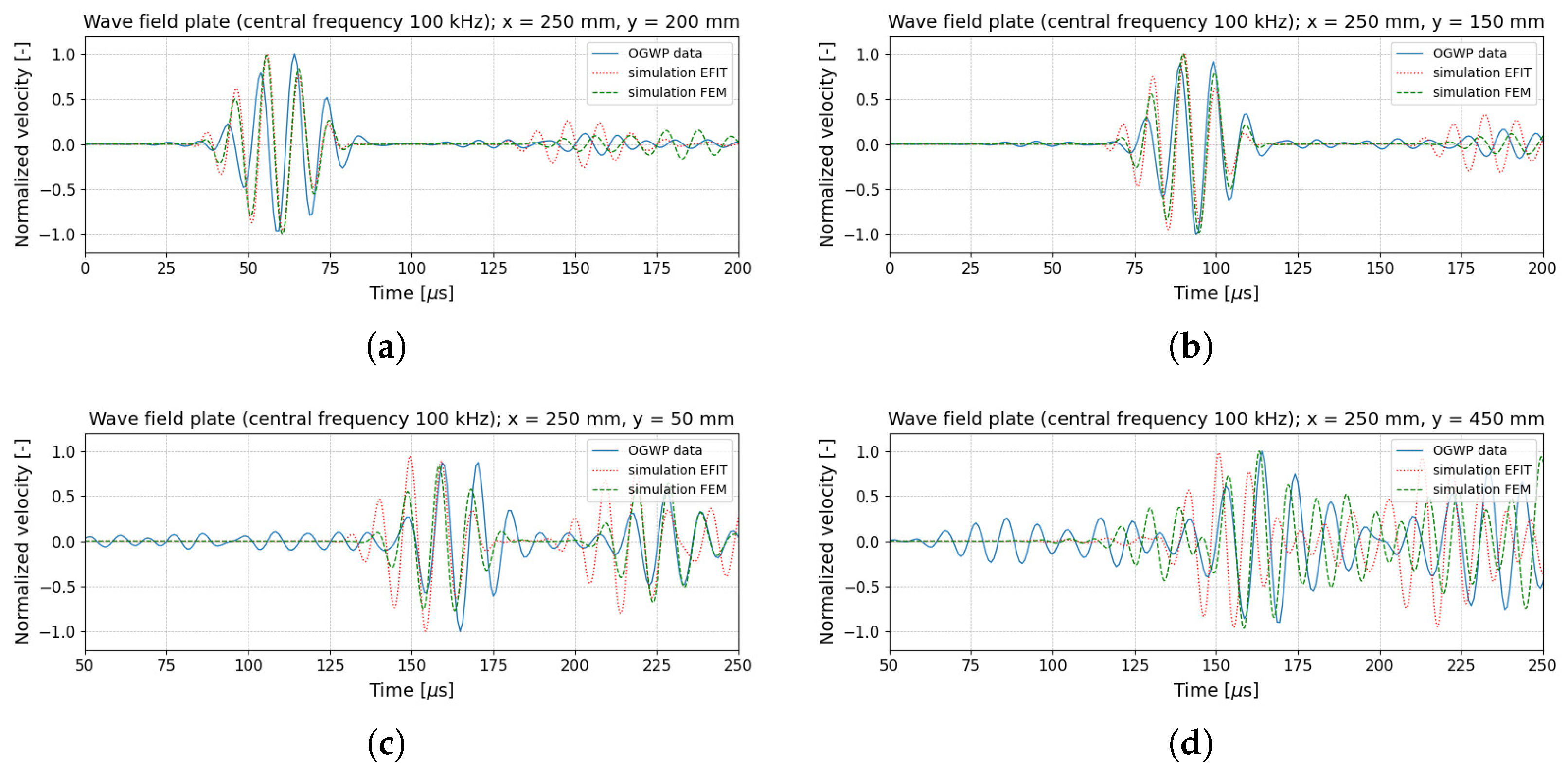
4.3. Comparison with Experimental Data
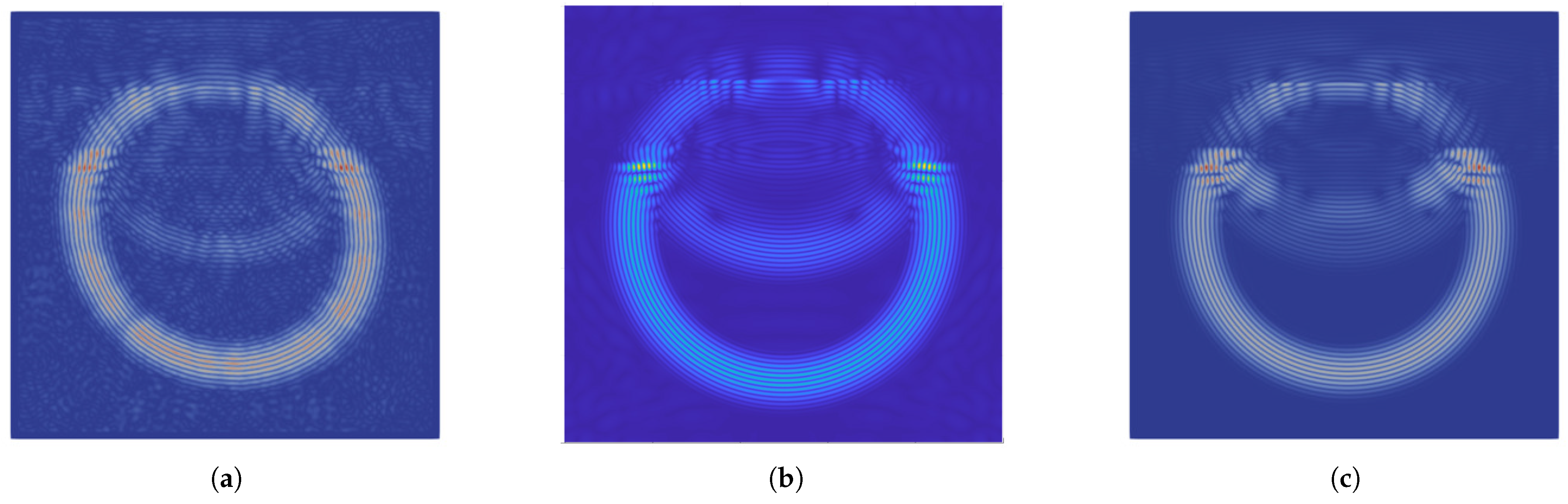
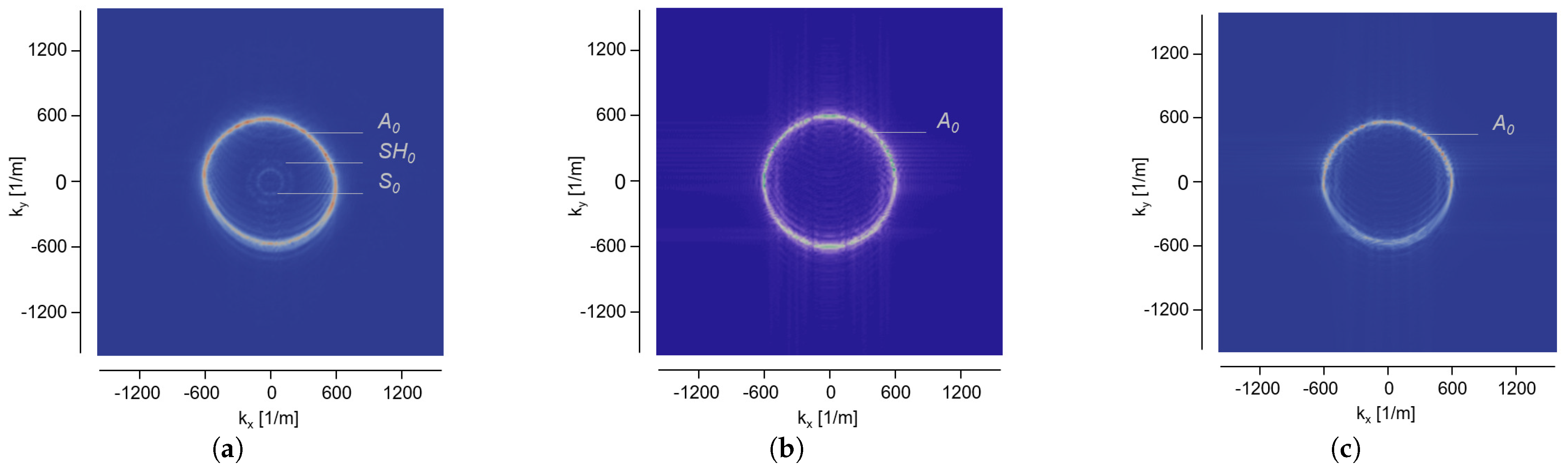
4.4. Transformation to Wavenumber–Frequency Domain
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3DFFT | Three-Dimensional Fast Fourier Transformation |
| CFRP | Carbon-Fiber-Reinforced Plastics |
| EFIT | Elasto-dynamic Finite Integration Technique |
| ESL | Equivalent Single Layer |
| FEM | Finite Eelement Method |
| FVM | Finite Volume Method |
| FSDT | First-Order Shear Deformation Theory |
| FDTD | Finite Difference—Time Domain Method |
| LW | Layer-Wise Method |
| MITC | Mixed Interpolation of Tensorial Components |
| NDE | Non Destructive Evaluation |
| OGW | Open Guided Waves Project |
| POD | Probability of Detection |
| SEM | Spectral Element Method |
| SHM | Structural Health Monitoring |
| UGW | Ultrasonic Guided Waves |
| VS-FDM | Velocity–Stress Finite Difference Method |
References
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mat. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L.; Lu, Y. Guided lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]
- Lee, B.C.; Staszewski, W.J. Modelling of Lamb waves for damage detection in metallic structures: Part I. Wave propagation. Smart Mat. Struct. 2003, 12, 804–814. [Google Scholar] [CrossRef]
- Lee, B.C.; Staszewski, W.J. Modelling of Lamb waves for damage detection in metallic structures: Part II. Wave interactions with damages. Smart Mat. Struct. 2003, 12, 815–824. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors; Academic Press (Elsevier): Amsterdam, The Netherlands, 2008. [Google Scholar]
- Willberg, C.; Duczek, S.; Vivar-Perez, J.M.; Ahmad, Z.A.B. Simulation methods for guided wave-based structural health monitoring: A review. Appl. Mech. Rev. 2015, 67, 010803. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Taylor, R. The Finite Element Method. The Basis, Vol. 1; Butterworth-Heinemann: Oxford, UK, 2000. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R. The Finite Element Method. Solid Mechanics, Vol. 2; Butterworth-Heinemann: Oxford, UK, 2000. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R. The Finite Element Method. Fluid Dynamics, Vol. 3; Butterworth-Heinemann: Oxford, UK, 2000. [Google Scholar]
- Yang, C.; Ye, L.; Su, Z.; Bannister, M. Some aspects of numerical simulation for Lamb wave propagation in composite laminates. Comp. Struct. 2006, 75, 267–275. [Google Scholar] [CrossRef]
- Kudela, P.; Żak, A.; Krawczuk, M.; Ostachowicz, W. Modelling of wave propagation in composite plates using the time domain spectral element method. J. Sound Vib. 2007, 302, 728–745. [Google Scholar] [CrossRef]
- Bathe, K.-J. Finite Element Procedures; Prentice Hall: Englewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Dauksher, W.; Emery, A.F. The solution of elastostatic and elastodynamic problems with Chebyshev spectral finite elements. Comput. Meth. Appl. Mech. Eng. 2000, 188, 217–238. [Google Scholar] [CrossRef]
- Peng, H.; Meng, G.; Li, F. Modeling of wave propagation in plate structures using three-dimensional spectral element method for damage detection. J. Sound Vib. 2009, 320, 942–954. [Google Scholar] [CrossRef]
- Ostachowicz, W.; Kudela, P.; Krawczuk, M.; Żak, A. Guided Waves in Structures for SHM: The Time-Domain Spectral Element Method; Wiley: Chichester, UK, 2012. [Google Scholar]
- Mesnil, O.; Recoquillay, A.; Druet, T.; Serey, V.; Hoang, H.T.; Imperiale, A.; Demaldent, E. Experimental validation of transient spectral finite element simulation tools dedicated to guided wave-based structural health monitoring. J. Nondestruct. Eval. Diag. Prog. Eng. Sys. 2021, 4, 041003. [Google Scholar] [CrossRef]
- Willberg, C.; Gabbert, U. Development of a three-dimensional piezoelectric isogeometric finite element for smart structure applications. Acta Mech. 2012, 223, 1837–1850. [Google Scholar] [CrossRef]
- Ramadas, C.; Balasubramaniam, K.; Joshi, M.; Krishnamurthy, C.V. Interaction of the primary anti-symmetric Lamb mode (A0) with symmetric delaminations: Numerical and experimental studies. Smart Mater. Struct. 2009, 18, 085011. [Google Scholar] [CrossRef]
- Mook, G.; Pohl, J.; Simonin, Y. Lamb wave generation, propagation and interactions in CFRP plates. In Lamb-Wave Based Structural Health Monitoring in Polymer Composites; Rolf Lammering, R., Gabbert, U., Sinapius, M., Schuster, T., Wierach, P., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 443–461. [Google Scholar]
- Fellinger, P.; Marklein, R.; Langenberg, J.; Kloholz, S. Numerical modeling of elastic wave propagation and scattering with EFIT-elastodynamic finite integration technique. Wave Motion 1995, 21, 47–66. [Google Scholar] [CrossRef]
- Schubert, F. Numerical time-domain modeling of linear and nonlinear ultrasonic wave propagation using finite integration techniques—Theory and applications. Ultrasonics 2004, 42, 221–229. [Google Scholar] [CrossRef] [PubMed]
- Tschöke, K.; Gravenkamp, H. On the numerical convergence and performance of different spatial discretization techniques for transient elastodynamic wave propagation problems. Wave Motion 2018, 82, 62–85. [Google Scholar] [CrossRef]
- Tschöke, K.; Mueller, I.; Memmolo, V.; Moix-Bonet, M.; Moll, J.; Lugovtsova, Y.; Golub, M.; Venkat, R.S.; Schubert, L. Feasibility of model-assisted probability of detection principles for structural health monitoring systems based on guided waves for fiber-reinforced composites. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 3156–3173. [Google Scholar] [CrossRef]
- Leckley, C.; Wheeler, K.R.; Hafiychuk, H.; Timuçin, D.A. Simulation of guided-wave ultrasound propagation in composite laminates: Benchmark comparisons of numerical codes and experiment. Ultrasonics 2018, 84, 187–200. [Google Scholar] [CrossRef]
- Moll, J.; Kexel, C.; Kathol, J.; Fritzen, C.-P.; Moix-Bonet, M.; Willberg, C.; Rennoch, M.; Koerdt, M.; Herrmann, A. Guided waves for damage detection in complex composite structures: The influence of omega stringer and different reference damage size. Appl. Sci. 2020, 10, 3068. [Google Scholar] [CrossRef]
- Moll, J.; Kathol, J.; Fritzen, C.-P.; Moix-Bonet, M.; Rennoch, M.; Koerdt, M.; Herrmann, A.S.; Sause, M.G.R.; Bach, M. Open Guided Waves: Online platform for ultrasonic guided wave measurements. Struct. Health Monit. 2019, 18, 1903–1914. [Google Scholar] [CrossRef]
- Kudela, P.; Radzienski, M.; Moix-Bonet, M.; Willberg, C.; Lugovtsova, Y.; Bulling, J.; Tschöke, K.; Moll, J. Dataset on full ultrasonic guided wavefield measurements of a CFRP plate with fully bonded and partially debonded omega stringer. Data Brief 2022, 42, 108078. [Google Scholar]
- Virieux, J. SH-wave propagation in heterogeneous media: Velocity-stress finite-difference method. Geophysics 1984, 49, 1933–1942. [Google Scholar] [CrossRef]
- Memmolo, V.; Monaco, E.; Boffa, N.; Maio, L.; Ricci, F. Guided wave propagation and scattering for structural health monitoring of stiffened composites. Compos. Struct. 2018, 184, 568–580. [Google Scholar] [CrossRef]
- Tzou, H.S. Piezoelectric Shells. Distributed Sensing and Control of Continua; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1993. [Google Scholar]
- SMR Package Documentation. Available online: https://www.smr.ch/doc/ (accessed on 7 September 2022).
- Rolfes, R.; Rohwer, K. Improved transverse shear stresses in composite finite elements based on First Order Shear Deformation Theory. Int. J. Num. Meth. Eng. 1997, 40, 51–60. [Google Scholar] [CrossRef]
- Reddy, J.N. Theory and Analysis of Elastic Plates; Taylor & Francis: Philadelphia, PA, USA, 1999. [Google Scholar]
- Ochoa, O.O.; Reddy, J.N. Finite Element Analysis of Composite Laminates; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1992. [Google Scholar]
- Bathe, K.-J.; Dvorkin, E.N. Short communication: A four-node plate bending element based on Mindlin/Reissner plate theory and a mixed interpolation. Int. J. Num. Meth. Eng. 1985, 21, 367–383. [Google Scholar] [CrossRef]
- Bathe, K.-J.; Iosilevicha, A.; Chapelle, D. An evaluation of the MITC shell elements. Comp. Struct. 2000, 75, 1–30. [Google Scholar] [CrossRef]
- Alfano, G.; Auricchio, F.; Rosati, L.; Sacco, E. MITC finite elements for laminated composite plates. Int. J. Numer. Meth. Eng. 2001, 50, 707–738. [Google Scholar] [CrossRef]
- Malatesta, M.M.; Moll, J.; Kudela, P.; Radzieński, M.; De Marchi, L. Wavefield analysis tools for wavenumber and velocities extraction in polar coordinates. IEEE Trans. Ultrason. Ferroelect. Freq. Control 2022, 69, 399–410. [Google Scholar] [CrossRef]
- Kudela, P.; Radzieński, M.; Fiborek, P.; Wandowski, T. Elastic constants identification of fibre-reinforced composites by using guided wave dispersion curves and genetic algorithm for improved simulations. Compos. Struct. 2021, 272, 114178. [Google Scholar] [CrossRef]
- Whitney, J.M.; Sun, C.T. A higher order theory for extensional motion of laminated composites. J. Sound Vib. 1973, 30, 85–97. [Google Scholar] [CrossRef]
- Żak, A. A novel formulation of a spectral plate element for wave propagation in isotropic structures. Fin. Elem. Analys. Des. 2009, 45, 650–658. [Google Scholar] [CrossRef]
- Willberg, C.; Koch, S.; Mook, G.; Pohl, J.; Gabbert, U. Continuous mode conversion of Lamb waves in CFRP plates. Smart Mat. Struct. 2012, 21, 075022. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elastic Coefficient/Density | Value | Unit |
|---|---|---|
| 125,462 | Mpa | |
| 8701 | MPa | |
| 0.372 | - | |
| 4200 | MPa | |
| 3000 | MPa | |
| 1.571 × 10 | kg/mm3 |
| Elastic Coefficient/Density | Value | Unit |
|---|---|---|
| 171,500 | MPa | |
| 8659 | MPa | |
| 0.324 | - | |
| 5882 | MPa | |
| 3331 | MPa | |
| 1.580 × 10 | kg/mm3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Savli, E.; Lefèvre, J.; Willberg, C.; Tschöke, K. Numerical Simulations in Ultrasonic Guided Wave Analysis for the Design of SHM Systems—Benchmark Study Based on the Open Guided Waves Online Platform Dataset. Aerospace 2023, 10, 430. https://doi.org/10.3390/aerospace10050430
Savli E, Lefèvre J, Willberg C, Tschöke K. Numerical Simulations in Ultrasonic Guided Wave Analysis for the Design of SHM Systems—Benchmark Study Based on the Open Guided Waves Online Platform Dataset. Aerospace. 2023; 10(5):430. https://doi.org/10.3390/aerospace10050430
Chicago/Turabian StyleSavli, Enes, Jean Lefèvre, Christian Willberg, and Kilian Tschöke. 2023. "Numerical Simulations in Ultrasonic Guided Wave Analysis for the Design of SHM Systems—Benchmark Study Based on the Open Guided Waves Online Platform Dataset" Aerospace 10, no. 5: 430. https://doi.org/10.3390/aerospace10050430
APA StyleSavli, E., Lefèvre, J., Willberg, C., & Tschöke, K. (2023). Numerical Simulations in Ultrasonic Guided Wave Analysis for the Design of SHM Systems—Benchmark Study Based on the Open Guided Waves Online Platform Dataset. Aerospace, 10(5), 430. https://doi.org/10.3390/aerospace10050430